ОПИСАНИЕ
ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится к способу и системе для физической тренировки, конкретнее к способу и системе для обеспечения субъекта тренировочной программой.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В настоящее время известно, что различные устройства обеспечивают субъекта упражнениями, например пациента, двигательная функция которого снижена в результате несчастного случая или заболевания. Обычно эти упражнения эффективны для восстановления двигательного контроля, при условии что тренировка является интенсивной и осуществляется руководство терапией пациента. Другим примером субъекта является спортсмен.
Реабилитационная система описана в заявке CN 200410056143.0. В описании реабилитационной системы во время упражнений поза пациента улавливается двумя камерами. Параметры, такие как диапазон движения, уровень физической активности и т.д., регистрируемые камерами и/или другими датчиками, используются для оценки фактического выполнения пациентом одного упражнения. Цель выполнения упражнения, такая как целевой уровень выполнения упражнения, заранее определяется специалистом-реабилитологом. Специалист может поставить более точный диагноз и/или разработать более подходящую программу реабилитации для пациента на основании сравнения фактического выполнения и целевого уровня.
Реабилитационную программу, например целевой уровень выполнения упражнения, невозможно скорректировать до тех пор, пока пациент не посетит специалиста. Длительность может быть слишком большой для обеспечения соответствия пациента заданным условиям. У пациента может пропасть мотивация выполнения упражнений, особенно при неконтролируемой программе реабилитации в домашних условиях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Поэтому целью настоящей заявки является предоставление способа и системы для обеспечения тренировочной программы, которая корректируется автоматически.
В соответствии с одним аспектом предложен способ обеспечения тренировочной программы, включающей, по меньшей мере, первое упражнение и второе упражнение, причем способ включает стадии: получения одного или более параметров, связанных с выполнением субъектом первого упражнения; и корректировки, на основании указанного одного или более параметров, одной или более целевых величин второго упражнения, которое предстоит обеспечить после указанного первого упражнения.
В соответствии с другим аспектом предложена система для обеспечения тренировочной программы, включающей, по меньшей мере, первое упражнение и второе упражнение, причем система включает: первый блок для получения одного или более параметров, связанных с выполнением субъектом первого упражнения; и второй блок для коррекции, на основании указанного одного или более параметров, одной или более целевых величин второго упражнения, которое предстоит обеспечить после указанного первого упражнения.
Эти и другие характеристики, признаки и преимущества настоящего изобретения станут очевидны из следующего подробного описания, взятого в сочетании с сопровождающими чертежами, которые иллюстрируют в качестве примера принципы изобретения. Описание дано только для примера без ограничения объема изобретения. Номера позиций, приведенные ниже, относятся к прилагаемым чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение объясняется в дополнительных подробностях в качестве примера и со ссылкой на сопровождающие чертежи, на которых:
На фиг. 1 показана система для обеспечения субъекта тренировочной программой в соответствии с одним вариантом осуществления изобретения;
Фиг. 2 представляет собой иллюстрацию тренировочной программы, включающей серию упражнений в соответствии с одним вариантом осуществления изобретения;
Фиг. 3 иллюстрирует блок-схему последовательности операций для процесса обеспечения субъекта тренировочной программой в соответствии с одним вариантом осуществления изобретения;
На фиг. 4 показана система обеспечения субъекта тренировочной программой в соответствии с другим вариантом осуществления изобретения; и
Фиг. 5 иллюстрирует блок-схему последовательности операций для процесса обеспечения субъекта тренировочной программой в соответствии с другим вариантом осуществления изобретения.
На всех указанных выше чертежах подобные номера позиций следует понимать как относящиеся к подобным, одинаковым или соответствующим признакам или функциям.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение будет описано в отношении конкретных вариантов осуществления и со ссылкой на определенные чертежи, но изобретение не ограничивается ими, но только формулой изобретения. Описанные чертежи являются лишь схематическими и не являются ограничивающими. На чертежах размер некоторых из элементов может быть преувеличен и не начерчен в масштабе в иллюстративных целях. На блок-схемах фиг. 1 и фиг. 4 пунктирные линии указывают, что рассматриваемый элемент может быть исключен из системы в различных вариантах осуществления; на блок-схемах фиг. 3 и фиг. 5, пунктирные линии указывают, что рассматриваемая стадия может быть исключена из процесса в различных вариантах осуществления. Использование единственного числа не исключает множественного числа этого существительного, если не указано иначе.
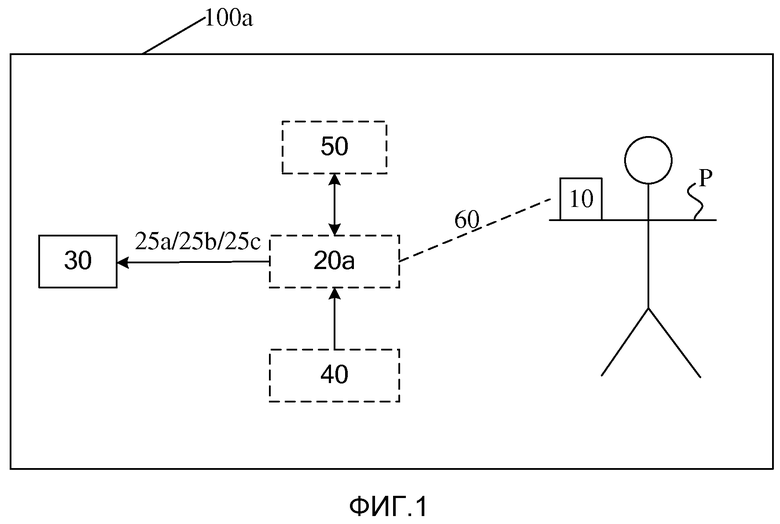
На фиг. 1 показана система 100a для обеспечения индивида P тренировочной программой в соответствии с одним вариантом осуществления изобретения. Система 100a включает сенсорное устройство 10, анализатор 20a и контроллер 30. Сенсорное устройство 10 может включать множество датчиков для выявления движения индивида P. Датчики могут представлять собой, например, инерционные датчики, основанные на маркерах, или безмаркерные системы камер для регистрации движения. В течение времени, когда упражнение выполняется индивидом P, сенсорное устройство 10 используется для контроля упражнений и фиксирования параметров движений индивида P. Параметры предоставляются в анализатор 20a через проводное или беспроводное соединение 60 между сенсорным устройством 10 и анализатором 20a.
В варианте осуществления параметры могут быть представлены в виде набора коэффициентов прогресса (коэффициентов выполнения), связанных с упражнением для определенной тренировки, например реабилитационной терапии. Величины коэффициентов прогресса могут быть связаны с выполнением упражнения индивидом P. При упражнениях для верхних конечностей набор коэффициентов прогресса может включать амплитуду PFa движения, скорость PFb движения, плавность PFc и устойчивость PFd туловища. Фактическое выполнение 25a (т.е. уровень выполнения) упражнения индивидом P генерируется анализатором 20a на основании анализа коэффициентов PFa, PFb, PFc и PFd прогресса.
В другом варианте осуществления система 100a дополнительно включает устройство 40 предоставления веса, которое может предоставлять набор весовых коэффициентов в анализатор 20a на основании характеристик упражнения. Например, при выполнении упражнения на растяжение верхних конечностей амплитуду PFa движения и устойчивость PFd туловища используют для оценки фактического выполнения 25b упражнения индивидом P. Следовательно, весовые коэффициенты WFa и WFd устанавливаются на ненулевые величины, а весовые коэффициенты WFb и WFc устанавливаются на ноль. Анализатор 20a выбирает PFa и PFd в соответствии с ненулевыми весовыми коэффициентами WFa и WFd. Таким образом, фактическое выполнение 25b оценивается по коэффициентам PFa и PFd прогресса.
Кроме того, индивид P может выполнять упражнение повторно. Число повторений упражнения может задаваться или определяться специалистом-реабилитологом. В другом варианте осуществления система 100a может, кроме того, включать запоминающее устройство 50. Во время повторного выполнения упражнения, величины коэффициентов прогресса сохраняются в запоминающем устройстве 50. В другом варианте осуществления, когда допускается, что упражнение выполняется повторно десять раз, то величины коэффициентов прогресса по одному или более средних количеств повторений упражнения, например, по среднему количеству повторений, состоящих из пяти, сохраняются в запоминающем устройстве 50. Когда индивид P заканчивает упражнение, то каждый из коэффициентов прогресса включает группу величин, подлежащих хранению в запоминающем устройстве 50. Средняя величина одной группы величин рассчитывается в виде фактической величины одного коэффициента прогресса. Фактические величины используются для оценки фактического выполнения 25c упражнения индивидом P. Иными словами, фактическое выполнение 25c может быть получено на основании фактических величин по каждому из коэффициентов PFa, PFb, PFc и PFd прогресса.
В контроллер 30 обеспечиваются показатели фактического выполнения (25a, 25b или 25c). В контроллере 30 показатели фактического выполнения упражнений сравниваются с целевым уровнем упражнения. Инструкция генерируется контроллером 30 для коррекции целевого уровня предстоящего упражнения на основании результата сравнения, что будет подробно объяснено далее в описании. Контроллер 30 обеспечивает индивида P предстоящим упражнением со скорректированными целевыми величинами посредством дисплея (не показан).
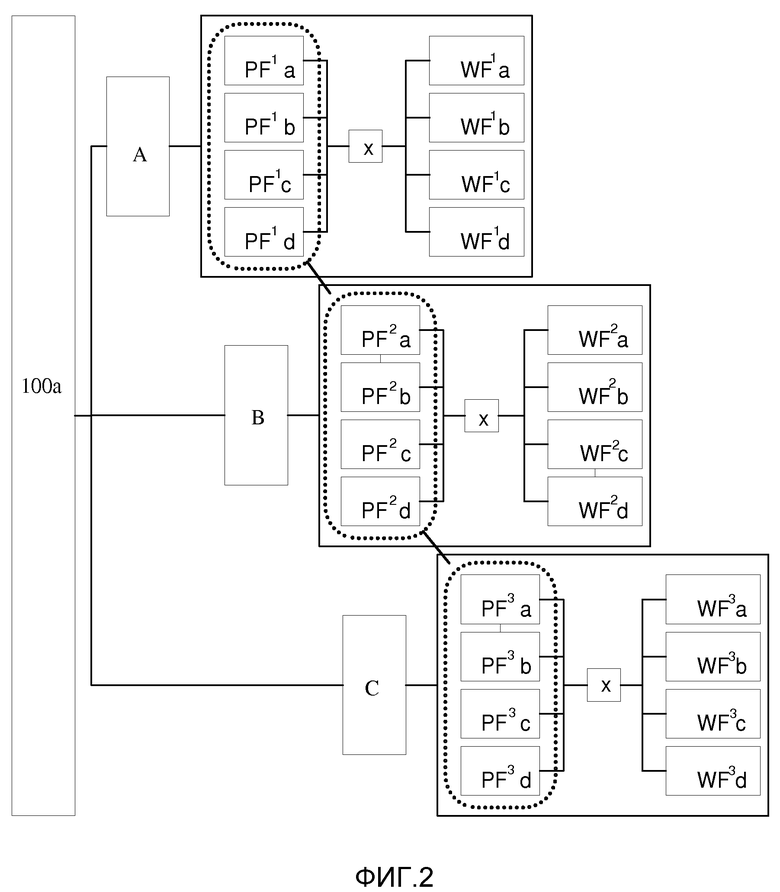
Фиг. 2 представляет собой иллюстрацию тренировочной программы, включающей серию упражнений, которые могут контролироваться системой 100a, как показано на фиг. 1. В данном варианте осуществления, тренировочная программа может использоваться для реабилитации после инсульта. Тренировочная программа включает множество сеансов, причем каждый сеанс, кроме того, включает серию упражнений, предназначенных для последовательного обеспечения субъекта ими. Как показано на фиг. 2, сеанс физической активности для верхних конечностей включает три упражнения, т.е. Упражнение A для движения кистями рук, Упражнение B для вращения в запястных суставах и Упражнение C для растяжения верхних конечностей.
Оценка уровня выполнения для каждого упражнения в сеансе физической активности для верхних конечностей проводится на основании четырех коэффициентов прогресса, т.е. амплитуды PFa движений, скорости PFb движений, плавности PFc и устойчивости PFd туловища. Один или более коэффициентов прогресса выбираются соответствующими весовыми коэффициентами, и в одном варианте осуществления данные выбранные коэффициенты прогресса могут использоваться при оценке фактического выполнения 25b. В данном случае допускается, что упражнения A, B и C представляют Стадии 1, 2 и 3. Верхний индекс 1, 2 и 3 в коэффициенте (PF) прогресса или весовом коэффициенте (WF), показанный на фиг. 2, указывает величины упражнений A, B и C, соответствующих стадии 1, 2 и 3 соответственно.
Ниже представлена таблица, показывающая связь между оценкой фактического выполнения упражнения, коэффициентами прогресса и весовыми коэффициентами.
WF1 b=0, WF1 d=0
WF2 d=0, WF2 c=0
WF3 b=0, WF3 c=0
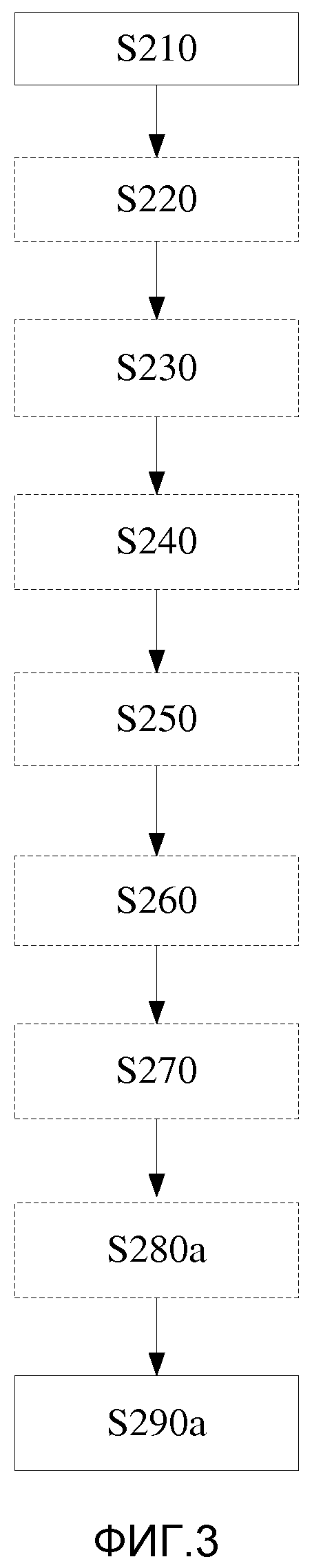
Фиг. 3 иллюстрирует блок-схему последовательности операций способа обеспечения индивида P тренировочной программой, показанной на Фиг. 2. Упражнения A, B и C предназначены для последовательного обеспечения субъекта ими. Когда субъекта обеспечивают Упражнением A, сенсорное устройство 10 контролирует выполнение Упражнения A индивидом P для получения коэффициентов прогресса, т.е. амплитуды PF1 a движения, скорости PF1 b движения, плавности PF1 c и устойчивости PF1 d туловища (Стадия S210).
Во время повторного выполнения Упражнения A индивидом P, например десять раз, величины коэффициентов прогресса для средних количеств повторений Упражнения A, состоящих из пяти, сохраняются в запоминающем устройстве 50 (Стадия S220). Когда индивид P заканчивает Упражнение A, средние величины каждого из коэффициентов PF1 a, PF1 b, PF1 c и PF1 d прогресса рассчитываются в качестве фактических величин на основании сохраненных величин коэффициентов прогресса по средним повторениям Упражнения A, состоящим из пяти. Фактические величины предоставляются в анализатор 20a (Стадия S230).
На основании характеристик Упражнения A, т.е. движения кистей рук в сеансе физической активности для верхних конечностей, устройство 40 предоставления веса предоставляет набор весовых коэффициентов WF1 a, WF1 b, WF1 c и WF1 d, соответствующих полученным коэффициентам PF1 a, PF1 b, PF1 c и PF1 d прогресса (Стадия S240). Весовые коэффициенты также предоставляются в анализатор 20a, где величины WF1 a и WF1 c не равны нулю, а величины WF1 b и WF1 d равны нулю (Стадия S250).
Анализатор 20a, на основании фактических величин коэффициентов прогресса и весовых коэффициентов, генерирует фактическое выполнение (т.е. фактический уровень выполнения) Упражнения A (Стадия S260). Поскольку WF1 b и WF1 d равны нулю, то PF1 a и PF1 c, соответствующие ненулевым весовым коэффициентам WF1 a и WF1 c, выбраны для использования при оценке фактического уровня выполнения Упражнения A. Затем фактический уровень выполнения предоставляется в контроллер 30 (Стадия S270). Контроллер 30 сравнивает фактический уровень выполнения с целевым уровнем упражнения A (Стадия S280a). В данном варианте осуществления целевой уровень для каждого упражнения определяется набором целевых величин коэффициентов прогресса, связанных с упражнением. Предпочтительно, исходные целевые величины предварительно определяются или задаются специалистом.
На основании результата сравнения, если разность между фактическим уровнем выполнения и целевым уровнем Упражнения A превышает пороговую величину, то контроллер 30 генерирует инструкцию скорректировать целевой уровень предстоящего Упражнения B и/или Упражнения C (Стадия S290a). В частности, если фактический уровень выполнения показывает, что индивид P выполняет Упражнение A очень хорошо, и инструкция затем указывает необходимость коррекции целевого уровня следующего упражнения (т.е. Упражнения B), то целевые величины коэффициентов PF2 a и PF2 c прогресса Упражнения B могут быть увеличены на основании выбранных коэффициентов PF1 a и PF1 c прогресса Упражнения A. С другой стороны, если фактический уровень выполнения показывает, что индивид P плохо выполняет Упражнение A, и инструкция также указывает необходимость коррекции целевого уровня Упражнения B, то целевые величины коэффициентов PF2 a и PF2 c прогресса Упражнения B могут быть уменьшены на основании выбранных коэффициентов PF1 a и PF1 C прогресса Упражнения A. Поскольку целевой уровень упражнения определяется целевыми величинами коэффициентов прогресса упражнения, то целевой уровень Упражнения B будет скорректирован путем обновления целевых величин его коэффициентов прогресса.
В одном варианте осуществления стадии коррекции целевого уровня Упражнения B, PF2 a и PF2 c Упражнения B обновляются замещением первоначальных целевых величин PF2 a и PF2 c Упражнения B фактическими величинами PF1 a и PF1 c Упражнения A соответственно. В альтернативном варианте осуществления исходные целевые величины PF2 a и PF2 c Упражнения B обновляются умножением их на коэффициент, который зависит от фактического уровня выполнения Упражнения A.
Затем индивида P обеспечивают Упражнением B со скорректированными целевыми величинами. Во время выполнения индивидом P следующего упражнения (т.е. Упражнения B) выполняется аналогичный процесс, т.е. Стадия S210 - Стадия S290a. Полученные коэффициенты PF2 a, PF2 b и PF2 d прогресса выбираются для использования при оценке фактического уровня выполнения Упражнения B, и то, корректируется ли целевой уровень следующего Упражнения C, зависит от сравнения фактического уровня выполнения Упражнения B и целевого уровня Упражнения B, который был скорректирован на основании коэффициентов прогресса Упражнения A.
В одном варианте осуществления стадии коррекции целевого уровня Упражнения C в соответствии с результатом сравнения часть целевых величин PF3 a, PF3 b и PF3 d Упражнения C обновляется. В качестве примера, целевые величины PF3 a и PF3 b Упражнения C замещаются фактическими величинами PF2 a и PF2 b Упражнения B, в то время как целевая величина PF3 d Упражнения C не обновляется. Затем индивида P обеспечивают Упражнением C со скорректированными целевыми величинами.
В соответствии с описанным выше вариантом осуществления исходные целевые величины PF2 a и PF2 c Упражнения B обновляются на основании фактических величин PF1 a и PF1 c Упражнения A. Далее исходные целевые величины PF3 a и PF3 b Упражнения C обновляются фактическими величинами PF2 a и PF2 b Упражнения B. Когда индивид P начинает выполнять Упражнение C, то все целевые величины коэффициентов прогресса Упражнения C, кроме PF3 d, обновляются. Поскольку, по меньшей мере, некоторые из целевых величин коэффициентов прогресса Упражнения C отличаются от их исходных целевых величин, то целевой уровень Упражнения C не представляет собой исходный целевой уровень Упражнения C.
На фиг. 4 показана система 100b обеспечения индивида P тренировочной программой в соответствии с другим вариантом осуществления изобретения. По сравнению с системой 100a, иллюстрируемой на фиг. 1, система 100b включает анализатор 20b. В дополнение к анализатору 20b сенсорное устройство 10, контроллер 30, устройство 40 предоставления веса и запоминающее устройство 50 в системе 100b, система 100b может включать такие же или подобные устройства, как и в системе, показанной на фиг. 1. В данном тексте опущено подробное описание указанных таких же или подобных устройств.
Как иллюстрируется на фиг. 4, в дополнение к оценке анализатором 20a фактического выполнения упражнения, как показано на фиг. 1, анализатор 20b, кроме того, включает построитель для создания матрицы коэффициентов для обновления целевых величин предстоящих упражнений. Процесс, выполняемый системой 100b, иллюстрируется на фиг. 5. Процесс может быть описан в соответствии с одним вариантом осуществления для обеспечения тренировочной программы, как показано на фиг. 2.
Как иллюстрируется на фиг. 5, анализатор 20b получает данные тренировки, полученные сенсорным устройством 10 во время выполнения индивидом P Упражнения A (Стадия S205). Затем, построитель генерирует матрицу коэффициентов путем использования данных тренировки на основании модели линейной аппроксимации (Стадия S208).
На основании предположения, что коэффициенты прогресса каждого упражнения представлены в виде элементов матрицы, матрица стадии m и матрица стадии m-1 может быть выражена как:
[PFm a,PFm b,PFm c,PFm n]=Coffnxn[PFm-1 a,PFm-1 b,PFm-1 c,PFm-1 n] (1),
где индекс (например, m и m-1) указывает стадию упражнения, n представляет число коэффициентов прогресса, связанных с определенным упражнением, и Coffn×n представляет матрицу коэффициентов.
В данном варианте осуществления матрица Упражнения A и матрица Упражнения B могут быть представлены в виде:
[PF2 a,PF2 b,PF2 c,PF2 d]=Coffn×n [PF1 a,PF1 b,PF1 c,PF1 d] (2)
Coffn×n представляет матрицу 4×4, таким образом, выражение (2), кроме того, представлено в виде:
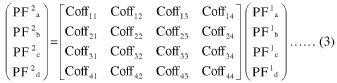
В соответствии с матричным алгоритмом для получения величин каждого элемента в матрице коэффициентов, данные тренировки, по меньшей мере, включают пять групп коэффициентов прогресса для одного упражнения, где каждая группа коэффициентов прогресса может быть получена сенсорным устройством 10 по одному повторению упражнения, выполненного индивидом P. В одном варианте осуществления индивид P выполняет упражнение десять раз и данные тренировки получают из одного или более средних повторений упражнения, например пяти средних повторений.
С использованием данных тренировки, матрица Coffn×n коэффициентов образуется на основании модели линейной аппроксимации, например минимизации RMSE (среднеквадратической ошибки). После получения матрицы Coffn×n коэффициентов из данных тренировки выполняется аналогичный процесс, т.е. Стадия S210- Стадия S280a. Полученные коэффициенты PFa и PFc прогресса выбираются для использования при оценке фактического уровня выполнения Упражнения A, и то, произведена ли коррекция целевого уровня Упражнения B, зависит от сравнения фактического уровня выполнения Упражнения A и целевого уровня Упражнения A. Стадии S210-S280a могут быть такими же или аналогичными стадиями как стадии, показанные на фиг. 3. Подробное описание этих стадий опущено в настоящем описании.
На основании результата сравнения, если разность между фактическим уровнем выполнения Упражнения A и целевым уровнем Упражнения A превышает пороговую величину, то контроллер 30 генерирует инструкцию скорректировать целевой уровень предстоящего Упражнения B (Стадия S290b). На Стадии S290b, целевые величины коэффициентов PF2 a, PF2 b, PF2 c и PF2 d прогресса Упражнения B получаются в соответствии с Выражением (3). По сравнению со Стадией S290a на фиг. 3 каждая из фактических величин коэффициентов PF1 a, PF1 b, PF1 C и PF1 d прогресса Упражнения A вносит вклад в целевые величины коэффициентов прогресса Упражнения B. То есть целевые величины коэффициентов прогресса Упражнения B корректируются комбинацией фактических величин коэффициентов PF1 a, PF1 b, PF1 C и PF1 d прогресса Упражнения A. Другими словами, даже хотя PF1 b и PF1 d Упражнения A не выбираются для использования для оценки фактического уровня выполнения Упражнения A в соответствии с ненулевыми весами, каждый из коэффициентов прогресса Упражнения A, включая PF1 b и PF1 d, оказывает влияние на целевые величины коэффициентов прогресса Упражнения B.
Затем индивид P обеспечивается Упражнением B со скорректированными целевыми величинами. Во время выполнения индивидом P следующего Упражнения B выполняется аналогичный процесс со Стадии Step S210 до Стадии S290b. Целевые величины коэффициентов PF3 a, PF3 b, PF3 c и PF3 d прогресса Упражнения C обновляются умножением фактических величин коэффициентов PF2 a, PF2 b, PF2 C и PF2 d прогресса Упражнения B на матрицу Coffn×n коэффициентов, сгенерированную на основании данных тренировки, полученных при Упражнении A. Таким образом, целевой уровень Упражнения С корректируется в соответствии с фактическими величинами коэффициентов прогресса Упражнения B.
Система для обеспечения субъекта тренировочной программой и способ, выполняемый системой, не должны ограничиваться указанными выше вариантами осуществления. Для специалистов в данной области будет очевидно, что различные аспекты заявленного изобретения могут реализовываться в других примерах, не выходящих за рамки этих специфических деталей.
В альтернативном варианте осуществления системы 100a анализатор 20a может быть удален из системы. Соответственно, стадия выполнения оценки фактического выполнения Упражнения A (Стадия S260) и стадия предоставления фактического уровня выполнения (Стадия 270) не выполняются. Стадия 280a сравнения, как показано на фиг. 3 или фиг. 5, может быть соответственно модифицирована в виде стадии 280b.
После предоставления в контроллер 30 фактических величин для каждого из коэффициентов PFa, PFb, PFc и PFd прогресса (Стадия 230) и также предоставления в контроллер 30 весовых коэффициентов, обеспечиваемых устройством 40 предоставления веса, (стадия 240), стадия 280b может выполняться в других вариантах осуществления, как описано ниже.
В одном варианте осуществления контроллер 30 генерирует инструкцию обновить целевые величины Упражнения B. Контроллер 30 выбирает соответствующие фактические величины коэффициентов прогресса Упражнения A в соответствии с ненулевыми весами, обеспечиваемыми устройством 40 предоставления веса. Затем целевые величины Упражнения B замещаются соответствующими фактическими величинами коэффициентов прогресса Упражнения A. В другом варианте осуществления контроллер 30 сначала сравнивает фактические величины коэффициентов прогресса Упражнения A с целевыми величинами Упражнения B. В еще одном варианте осуществления фактические величины коэффициентов прогресса Упражнения A, обеспеченные ненулевыми весами, сравниваются с целевыми величинами Упражнения B. То, корректируются ли целевые величины Упражнения B, зависит от результата сравнения. Например, PF1 a и PF1 c Упражнения A сравниваются соответственно с PF2 a и PF2 c Упражнения B. На основании результатов сравнения, если разность между PF1 a Упражнения A и PF2 a Упражнения B превышает пороговую величину, в то время как разность между PF1 c Упражнения A и PF2 C Упражнения B не превышает пороговую величину, то только PF2 a Упражнения B замещается PF1 a Упражнения A. То есть каждая из целевых величин Упражнения B может корректироваться результатом сравнения фактических величин коэффициентов прогресса Упражнения A и соответствующих целевых величин Упражнения B.
Кроме того, порядок стадий не должен быть ограничен процедурой, показанной на фиг. 3 и фиг. 5. В другом варианте осуществления способа обеспечения субъекта тренировочной программой, стадия генерирования весовых коэффициентов (т.е. Стадия 240) и предоставления весовых коэффициентов в анализатор (т.е. Стадия 250), например, могут выполняться перед стадией предоставления фактических величин коэффициентов прогресса в анализатор (т.е. Стадия 230).
Кроме того, матрица коэффициентов, описанная в системе 100b, может быть создана на основании данных тренировки, связанных с каждым из упражнений. То есть новая матрица коэффициентов может быть сгенерирована с использованием данных тренировки, полученных в начале предстоящего упражнения. Новая матрица коэффициентов используется для коррекции целевых величин предстоящего упражнения. В альтернативном варианте осуществления матрица коэффициентов может быть общей для упражнений, включенных в один сеанс. Новая матрица коэффициентов генерируется с использованием данных тренировки, полученных в начале упражнения в следующем сеансе, выполняемом субъектом.
Кроме того, как описано в указанном выше варианте осуществления, матрица коэффициентов образуется на основании модели линейной аппроксимации. Однако другие математические модели, например, используемые при моделировании нервной сети, также могут применяться для генерирования матрицы коэффициентов на основании данных тренировки.
Кроме того, операция обновления целевых величин предстоящего упражнения на основании коэффициентов прогресса, полученных при выполнении упражнения, могут выполняться в конце упражнения или альтернативно, в начале предстоящего упражнения.
Кроме того, анализатор 20a, контроллер 30 и устройство 40 предоставления веса описаны в виде отдельных модулей в вариантах осуществления, как показано на фиг. 1 и 4. Однако специалист в данной области может понять, что функции этих модулей могут быть исполнены процессором и машиночитаемым носителем, содержащим записанную на нем программу, реализованную программно, включающая набор инструкций. Когда инструкции исполняются, то процессор сможет выполнить любой из способов, описанных в указанных выше вариантах осуществления.
Следует отметить, что описанные выше варианты осуществления представлены для описания, а не ограничения изобретения, и следует понимать, что модификации и изменения могут быть внесены в него без отхода от сущности и объема изобретения, как вполне понятно специалистам в данной области. Такие модификации и изменения считаются входящими в объем изобретения и прилагаемой формулы изобретения. Объем защиты изобретения определяется сопровождающей формулой изобретения. Кроме того, любые номера позиций в формуле изобретения не должны трактоваться как ограничение объема притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ реабилитации двигательной функции | 2021 |
|
RU2776339C1 |
| ЗАХВАТ ОПТИЧЕСКИХ ДАННЫХ ОБ УПРАЖНЕНИЯХ В ДОПОЛНЕНИЕ К РАСЧЕТУ ОЦЕНКИ ЗДОРОВЬЯ | 2012 |
|
RU2607953C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫРАВНИВАНИЯ ГРОМКОГОВОРИТЕЛЯ В КОМНАТЕ | 2006 |
|
RU2421936C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРЕФОРМЫ | 2007 |
|
RU2415750C2 |
| ГЕНЕРАЦИЯ ПОСЛЕДОВАТЕЛЬНОСТИ ОПЕРАЦИЙ ПО КОМПЛЕКСНОМУ АНАЛИЗУ НА ОСНОВЕ ПРЕДСКАЗАТЕЛЬНОЙ МОДЕЛИ ОДИНОЧНОЙ СКВАЖИНЫ - МОДУЛЬНОГО ДИНАМИЧЕСКОГО ТЕСТЕРА (SWPM-MDT) | 2005 |
|
RU2336567C1 |
| Способ и устройство для передачи информации управления восходящей линии связи и машиночитаемый носитель данных | 2020 |
|
RU2800587C1 |
| ИНТЕРФЕЙС С УЛУЧШЕННОЙ ДОСТУПНОСТЬЮ | 2021 |
|
RU2827965C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ГЕНЕРАЦИИ СИНТЕТИЧЕСКИХ ДАННЫХ | 2023 |
|
RU2824524C1 |
| ПРЕДСКАЗАНИЕ ВЕКТОРОВ ДВИЖЕНИЯ ПРИ КОДИРОВАНИИ ВИДЕО | 2012 |
|
RU2575690C2 |
| КАНАЛЬНОЕ КОДИРОВАНИЕ НА ОСНОВЕ КОМПЛЕКСНОГО ПРЕОБРАЗОВАНИЯ С ЧАСТОТНЫМ КОДИРОВАНИЕМ С РАСШИРЕННОЙ ПОЛОСОЙ | 2007 |
|
RU2555221C2 |


Группа изобретений относится к спортивной медицине, реабилитации, физической культуре, методам тренировок и включает способ и систему обеспечения субъекта тренировочной программой, включающей в себя, по меньшей мере, первое и второе упражнения. Способ включает этапы получения фактических величин параметров выполнения упражнений, связанных с выполняемыми движениями, и оценки фактических уровней выполнения субъектом упражнений на основании, по меньшей мере, части полученных фактических величин и целевых величин. При этом корректируют на основании фактического уровня выполнения субъектом первого упражнения, по меньшей мере, часть вторых целевых величин второго набора параметров выполнения упражнения, связанных с выполняемыми движениями второго упражнения. Наборы параметров выполнения упражнения связаны с выполняемыми движениями тренировочной программы и включают, по меньшей мере, один из следующих параметров: амплитуда движения, скорость движения, плавность и устойчивость туловища. Система содержит сенсорное устройство, выполненное с возможностью получения фактических величин набора параметров выполнения упражнения, связанных с выполняемыми движениями упражнения; анализатор с возможностью оценки фактического уровня выполнения субъектом упражнения на основании, по меньшей мере, части полученных фактических величин и целевых величин; и контроллер с возможностью коррекции на основании фактического уровня выполнения субъектом первого упражнения, по меньшей мере, части целевых величин второго набора параметров выполнения упражнения, связанных с выполняемыми движениями второго упражнения, которое предстоит обеспечить субъекту после первого упражнения. Группа изобретений обеспечивает наиболее подходящую программу индивидуальной тренировки, реабилитации с возможностью контроля и, при необходимости, коррекции программы в процессе ее выполнения, с сохранением мотивации пациента в том числе в домашних условиях. 2 н. и 9 з.п. ф-лы, 5 ил., 1 табл.
1. Способ обеспечения субъекта тренировочной программой, включающей в себя, по меньшей мере, первое и второе упражнения, причем способ включает в себя этапы, на которых:
- получают фактические величины первого набора параметров выполнения упражнения, связанных с выполняемыми движениями первого упражнения, выполняемого один или более раз субъектом;
- оценивают первый фактический уровень выполнения субъектом первого упражнения на основании по меньшей мере части полученных фактических величин и первых целевых величин, и
- корректируют, на основании фактического уровня выполнения субъектом первого упражнения, по меньшей мере, часть вторых целевых величин второго набора параметров выполнения упражнения, связанных с выполняемыми движениями второго упражнения, которое необходимо обеспечить субъекту после первого упражнения,
причем первый и второй наборы параметров выполнения упражнения связаны с выполняемыми движениями тренировочной программы;
причем первый и второй наборы параметров выполнения упражнения включают, по меньшей мере, один из следующих параметров: амплитуда движения, скорость движения, плавность и устойчивость туловища.
2. Способ по п. 1, дополнительно включающий в себя этап, на котором:
- предоставляют весовой коэффициент для каждого параметра выполнения упражнения из первого набора параметров выполнения упражнения, причем предоставленные весовые коэффициенты связаны с выполняемыми движениями первого упражнения, и
первый фактический уровень выполнения субъектом первого упражнения дополнительно оценивают на основании, по меньшей мере, части фактических величин параметров выполнения упражнения первого набора параметров выполнения упражнения и весовых коэффициентов, предоставленных для каждого параметра выполнения упражнения из первого набора параметров выполнения упражнения.
3. Способ по п. 1, в котором тренировочная программа дополнительно включает третье упражнение, и этап коррекции дополнительно включает подэтап коррекции, по меньшей мере, части третьих целевых величин третьего набора параметров выполнения упражнения, связанных с выполняемыми движениями третьего упражнения, которое предстоит обеспечить субъекту после первого и второго упражнений, на основании второго фактического уровня выполнения субъектом второго упражнения.
4. Способ по любому одному из пп. 1-4, дополнительно включающий в себя этапы, на которых:
- сравнивают первый фактический уровень выполнения и первый целевой уровень выполнения упражнения субъектом, выполняющим первое упражнение, для установления различия; и
- генерируют инструкцию скорректировать, по меньшей мере, часть вторых целевых величин второго набора параметров выполнения упражнения, когда различие превышает заданную пороговую величину.
5. Способ по п. 1, дополнительно включающий в себя этап, на котором обеспечивают субъекту второе упражнение со скорректированными вторыми целевыми величинами для второго набора параметров выполнения упражнения.
6. Способ по п. 1, в котором этап получения данных включает подэтап, на котором:
- выявляют движение субъекта, выполняющего первое упражнение, для получения фактических величин первого набора параметров выполнения упражнения.
7. Система для обеспечения субъекта тренировочной программой, включающей в себя, по меньшей мере, первое и второе упражнения, причем система содержит:
- сенсорное устройство (10), выполненное с возможностью получения фактических величин первого набора параметров выполнения упражнения, связанных с выполняемыми движениями первого упражнения, выполняемого субъектом один или более раз;
- анализатор (20а, 20b), выполненный с возможностью оценки фактического уровня выполнения субъектом первого упражнения на основании, по меньшей мере, части полученных фактических величин и первых целевых величин; и
- контроллер (30), выполненный с возможностью коррекции на основании фактического уровня выполнения субъектом первого упражнения, по меньшей мере, части целевых величин второго набора параметров выполнения упражнения, связанных с выполняемыми движениями второго упражнения, которое предстоит обеспечить субъекту после первого упражнения,
причем первый и второй наборы параметров выполнения упражнения связаны с выполняемыми движениями тренировочной программы;
причем первый и второй наборы параметров выполнения упражнения включают, по меньшей мере, один из следующих параметров: амплитуда движения, скорость движения, плавность и устойчивость туловища.
8. Система по п. 7, дополнительно включающая устройство (40) предоставления веса, выполненное с возможностью предоставления весового коэффициента для каждого параметра выполнения упражнения из первого набора параметров выполнения упражнения, весовые коэффициенты связаны с выполняемыми движениями первого упражнения, и анализатор дополнительно выполнен с возможностью оценки фактического уровня выполнения субъектом первого упражнения на основании, по меньшей мере, части фактических величин параметров выполнения упражнения первого набора параметров выполнения упражнения и весовых коэффициентов, предоставленных для каждого параметра выполнения упражнения из первого набора параметров выполнения упражнения.
9. Система по п. 7, в которой тренировочная программа дополнительно включает третье упражнение, и контроллер дополнительно выполнен с возможностью коррекции, по меньшей мере, части целевых величин третьего набора параметров выполнения упражнения, связанных с выполняемыми движениями третьего упражнения, которое предстоит обеспечить субъекту после первого и второго упражнений.
10. Система по любому из пп. 7-9, в которой контроллер дополнительно выполнен с возможностью:
- сравнения фактического уровня выполнения и целевого уровня выполнения субъектом первого упражнения для установления различия; и
- генерирования инструкции скорректировать, по меньшей мере, часть целевых величин второго набора параметров выполнения упражнения, когда различие превышает заданную пороговую величину.
11. Система по п. 7, в которой сенсорное устройство включает множество датчиков для выявления движения субъекта с целью получения фактических величин первого набора параметров выполнения упражнения.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ ТРЕНИРОВКИ СПОРТСМЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2126285C1 |
| Устройство для управления двигательными функциями спортсмена в процессе обучения | 1979 |
|
SU786987A1 |
| US 2009062627 A1, 05.03.2009 | |||
| US 4726582 A, 23.02.1988 | |||
| DE 102005027329 A1, 21.12.2006 | |||
| US 2007219059 A1, 20.09.2007. | |||

