Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к области восстановления двигательной функции, в частности, выполняемого роботизированными системами реабилитации двигательной функции.
Уровень техники
Пациенты с нарушением двигательной функции, страдающие от недостаточного функционирования/координации конечностей (в частности, постинсультных нарушений), обычно испытывают значительные трудности в выполнении простых каждодневных двигательных задач. Поскольку эти трудности в движении могут затрагивать все аспекты жизни и стать постоянными, существует необходимость в как можно более быстром лечении и восстановлении (реабилитации) таких пациентов. Обратная связь является важным фактором в тренировке/лечении пациентов с нарушением двигательной функции, поскольку она может использоваться для оценки результативности/качества выполнения задач пациентом во время лечения/тренировки. Например, роботизированная реабилитация/терапия предусматривает передовые технические приемы для тренировки и восстановления двигательных функций пациентов с нарушением двигательной функции. Такие системы реабилитации с применением роботов могут точно измерять работу моторики (в частности, траекторию, скорость, ускорение) пациентов, и следовать специализированным тренировочным протоколам, разработанным для исправления ежедневного выполнения двигательных задач и тем самым совершенствования человека в выполнении регулярных ежедневных действий.
Лечение нарушений двигательной функции может использовать методы усиления ошибок (также называемое «увеличение ошибок»), в которых ошибки в движении пациента временно усиливаются для стимулирования приложения корректирующих сил тренируемым пациентом. Увеличение кинематических ошибок пациента способствуют формированию нервных сигналов, стимулирующих двигательную адаптацию и обучение. Методы увеличения ошибок предпочтительно реализовывать в роботизированных системах лечения, которые могут быть выполнены с возможностью точного измерения движения пациента относительно требуемой траектории и/или профилей скорости/ускорения, и соответствующим образом разрабатывать действия, включающие в себя приложение сил увеличения ошибок для стимулирования корректирующих реакций пациента. Пациенты, проходящие лечение с применением роботизированных систем, в которых используются схемы увеличения ошибок, демонстрировали улучшенное выполнение двигательных задач.
Ниже кратко описаны некоторые научные работы, в которых рассматриваются роботизированные методы лечения, для предоставления справочной информации, которая касается настоящей заявки, но не обязательно является уровнем техники.
Р. Живон-Майо и др. («Предварительное исследование увеличения ошибок компонента скорости протягивающих движений постинсультного пациента. Международный журнал о терапии и реабилитации, 2014; 21 (4): 160-168) рассмотрели новый роботизированный способ реабилитации для улучшения протягивающих движений руки посредством тренировки с увеличением ошибки скорости. В этой научной работе для оценки результатов использовалось несколько клинических и кинематических измерений. В этой научной работе контрольная группа совершала задачи по протягиванию одновременно с тем, как они были подключены к роботу, но без приложения каких бы то ни было сил увеличения ошибок к их верхним конечностям. Роботизированная система была запрограммирована так, что отклонения от оптимального профиля траектории и скорости означало испытание внешних сил увеличения ошибок. После 5 недель лечения с увеличением ошибки скорости все участники в экспериментальной группе демонстрировали движения, приближающиеся к их оптимальным профилям, а также уменьшение изменчивости в их траектории движения.
Ф. Абдоллахи и др. («Восстановление управления рукой с применением усиления ошибок», Международная конференция IEEE 2011 по реабилитационной робототехнике, 1-6) представили результаты, в которых девятнадцать перенесших инсульт с хроническим гемипарезом одновременно были задействованы в трио из пациента, терапевта и машины. Концентрированная тренировка в сочетании с усилением ошибок, в которой тактильные (силы робота) и графические (дисплей) искажения использовались для увеличения обратной связи, относящейся к ошибке, сравнивалась с концентрированной тренировкой как таковой. В шестинедельном рандомизированном перекрестном исследовании 60-минутного ежедневного лечения три раза в неделю в течение двух недель, терапевт предоставлял визуальную цель с помощью устройства сопровождения, которое перемещало курсор перед пациентом, который был проинструктирован поддерживать курсор на цели. Пациент, терапевт, техник-оператор и эксперт не были осведомлены о типе лечения. Результаты показали постепенно увеличивающуюся пользу по большинству дней, но не всем дням, резкие приросты результативности и пользу тренировки с усилением ошибки в финальных оценках. Дж. Л. Паттон и др. («Специально разработанная тактильная тренировка для восстановления протягивающей способности людей с постинсультным гемипарезом», Журнал исследований и разработок в области реабилитации - JRRD, том 43, номер 5, страницы 643-656, август/сентябрь 2006 г.) представляют первоначальный тест метода повторной тренировки навыков протягивания у пациентов с постинсультным гемипарезом, при котором ошибки временно усиливают, чтобы стимулировать обучение и компенсацию. Люди с постинсультным гемипарезом держали в руках робот-манипулятор в горизонтальной плоскости, который мог проявлять различные силы при записи движений пациентов. Измерялось восстановление прямолинейности движений пациентов за один визит в лабораторию (~3 ч). После тренировки силы были возвращены к нулю для дополнительных 50 движений, чтобы определить, сохранятся ли последствия. Все испытуемые показали немедленную пользу от тренировки, хотя 3 из 10 испытуемых не сохранили эти преимущества на оставшуюся часть эксперимента.
С. Израэли и др. («Улучшение траектории движений руки за счет усиления ошибок», Достижения экспериментальной медицины и биологии, 2018; 1070: 71-84) исследуют, могут ли адаптивные реакции на силовые поля усиления ошибок уменьшать ошибки траектории при движении руки в разных направлениях у здоровых людей. Исследование проводилось как рандомизированное контролируемое испытание с участием 41 здорового человека. Исследовательская группа тренировалась на трехмерной роботизированной системе, в которой применялись силы усиления ошибок на руке во время выполнения заданий. Контрольная группа выполняла тот же протокол в условиях нулевого поля. Смешанная модель ANOVA была реализована для исследования взаимодействия между группами и временем, а также изменений в показателях результатов измерений внутри групп. Было обнаружено, что для группы × время наблюдался значительный эффект взаимодействия с точки зрения величины ошибок движения в игровых наборах. Ошибка траектории в исследуемой группе значительно снизилась с 0,035±0,013 м на исходном уровне до 0,029±0,011 м при последующем наблюдении, что составило улучшение в 14,8%.
Раскрытие сущности изобретения
Есть много трудностей, связанных с адаптацией схем увеличения ошибок для терапевтического лечения двигательной функции пациентов. Определенный протокол увеличения ошибок, разработанный для соответствия условиям и/или поражению конкретного пациента, вряд ли подойдет для лечения других пациентов с другими состояниями/нарушениями или даже пациентов, страдающих тем же нарушением. Соответственно, уникальный протокол увеличения ошибок должен быть адаптирован для каждого пациента в соответствии с конкретными характеристиками человека, в частности, физическим состоянием, типом нарушения, возрастом, весом, ростом, полом, двигательными способностями, адаптивной реакцией и т.д.
Настоящая заявка раскрывает методы адаптивного построения протокола регулирования ошибок для конкретного пациента для согласования протокола с конкретными характеристиками и способностями пациента с использованием системы двигательной терапии. Также в настоящей заявке раскрыты методы начальной и непрерывной диагностики эффективности лечения двигательной терапией с использованием функции (функций) увеличения и/или коррекции ошибок (в настоящей заявке обычно называемых функциями/профилями регулирования ошибок), специально адаптированных для каждого пациента, тем самым обеспечивая возможность начального скрининга или прекращения неэффективного лечения (лечений).
Раскрытые в настоящей заявке методы полезны, но не ограничиваются ими, для роботизированных систем реабилитации двигательной функции, в которых задействованная в упражнении часть тела пациента (в частности, конечность), соединяется с системой роботизированной руки. Система может быть сконфигурирована для манипулирования системой роботизированной руки для приложения помогающих или мешающих сил к задействованной в упражнении части тела во время выполняемых таким образом упражнений. Приведенные методы терапии двигательной функции сконфигурированы для адаптивного построения функции/профиля регулирования ошибок для конкретного пациента на основе характеристической информации пациента, указывающей на его состояние, и/или данных измерения, указывающих на результативность и прогресс пациента, которые собираются во время сеансов упражнений, выполняемых пациентом.
Функция/профиль регулирования ошибок, построенная для пациента, может иметь по меньшей мере один участок увеличения ошибок, в котором силы увеличения ошибок (также называемые в данном документе мешающими силами), прикладываются в реальном времени системой двигательной терапии, чтобы препятствовать движениям, выполняемым пациентом и, опционально, по меньшей мере, один участок коррекции ошибок, в котором силы коррекции ошибок (также называемые здесь помогающими силами) прикладываются в реальном времени системой двигательной терапии для ослабления ошибок/отклонений в движениях, выполняемых пациентом.
Один или более датчиков могут использоваться в системе двигательной терапии для генерирования данных/сигналов измерений, указывающих на движения, выполняемые, и/или силы, прикладываемые, задействованной в упражнении частью тела во время выполняемых тренировок. Данные измерений используются для определения моделей/траекторий движения, выполняемых задействованной в упражнении частью тела во время упражнения, и/или сил, прилагаемых таким образом к ним. Определенные модели/траектории движения и/или силы (и, опционально, связанные с ними временные профили) сравниваются с ожидаемыми моделями/траекториями движения и/или силами (и, опционально, соответствующими ожидаемыми временными профилями, связанными с ними), чтобы определить ошибки/отклонения движений, выполняемых пациентом относительно, ожидаемого выполнения. Определенные ошибки/отклонения затем используются для адаптации параметров функции/профиля регулирования ошибок, чтобы она лучше соответствовала возможностям пациента.
В некоторых вариантах осуществления система двигательной терапии сконфигурирована для выполнения одной или более предварительных тренировок, в которых пациент выполняет различные движения задействованной в упражнении частью тела, в то время как к ней прикладываются мешающие или помогающие силы посредством системы роботизированной руки. Данные измерений, полученные в результате одного или более предварительных упражнений, обрабатываются и анализируются для определения из них максимального параметра прикладываемой силы для функции/профиля регулирования ошибок, подлежащего использованию системой во время упражнений, выполняемых таким образом пациентом. Другие параметры функции/профиля регулирования ошибок также могут быть скорректированы на основании обнаруженных ошибок/отклонений.
Например, один или более диапазонов ошибок могут быть определены для определения одного или более участков увеличения ошибок и/или участков коррекции ошибок функции/профиля регулирования ошибок, в которых постоянная сила, в частности, определенный максимальный параметр прикладываемой силы, подлежит приложению системой к задействованной в упражнении части тела. Один или более других диапазонов ошибок соответствующих одного или более участков нечувствительности/свободных участков могут быть определены для функции/профиля регулирования ошибок, в которых сила не должна прикладываться к задействованной в упражнении части тела во время сеансов упражнения. По меньшей мере один из участков нечувствительности/свободных участков может быть определен для ошибок/отклонений, которые очень малы и/или пренебрежимо малы. Один или более других участков нечувствительности/свободных участков могут использоваться в функции/профиле регулирования ошибок для переходов функции/профиля регулирования ошибок от участка увеличения ошибок к участку коррекции ошибок, и наоборот.
Система может определять диапазон ошибок для переходного участка от участка нечувствительности/свободного участка к участку увеличения ошибок или к участку коррекции ошибок функции/профиля регулирования ошибок. В переходном участке силы, прикладываемые системой, постепенно изменяются от нулевой силы, прикладываемой системой на участке нечувствительности/свободном участке, к постоянной силе, прикладываемой системой на участке увеличения ошибок или на участке коррекции ошибок, и наоборот. Силы, прикладываемые системой на переходном участке, могут быть монотонно увеличивающимися или монотонно уменьшающимися, силами увеличения ошибок или коррекции ошибок, в зависимости от направления перехода. Однако в возможных вариантах осуществления силы, прикладываемые системой на переходных участках, могут иметь квадратичную, полиномиальную, ступенчатую инкрементную/декрементную или нелинейную структуру вдоль оси ошибок.
После установки различных параметров функции/профиля регулирования ошибок, один или более сеансов упражнения для пациента могут быть проведены системой без функции/профиля регулирования ошибок, т.е. без приложения сил увеличения или коррекции ошибок, и соответствующая средняя ошибка определяется для выполнения упражнений частью тела без приложения сил регулирования на основании полученных данных измерений. Один или более параметров функции/профиля регулирования ошибок могут быть скорректированы на основе определенной средней ошибки для упражнения без приложения сил регулирования ошибок, в частности, максимальное или минимальное значение силы увеличения или коррекции ошибок, один или более диапазонов нечувствительности к ошибкам/ свободных диапазонов, и/или один или более диапазонов ошибок для приложения силы (сил) увеличения или коррекции ошибок.
Затем может быть проведен определенный набор сеансов упражнения с использованием функции/профиля регулирования ошибок с приложением сил регулирования ошибок. Для каждого сеанса упражнений, выполняемого с применением сил регулирования ошибок, определяется соответствующая средняя ошибка, и затем можно соответствующим образом настраивать один или более параметров функции/профиля регулирования ошибок. Например, в некоторых вариантах осуществления максимальный (и/или минимальный) параметр прикладываемой силы функции/профиля регулирования ошибок масштабируется в большую или меньшую сторону на основе средней ошибки, определенной для выполнения упражнения пациентом относительно сил регулирования ошибок. Опционально, но в некоторых вариантах осуществления предпочтительно, после каждого сеанса упражнений, проводимого пациентом с приложением сил регулирования ошибок, максимальный (и/или минимальный) параметр прикладываемой силы функции/профиля регулирования ошибок масштабируется в меньшую сторону (или в большую сторону), и вновь определенная средняя ошибка для упражнений с силами регулирования ошибок используется для определения прогресса пациента. Дополнительно или в качестве альтернативы, один или более диапазонов нечувствительности к ошибкам/свободных диапазонов и/или один или более диапазонов ошибок для приложения силы (сил) увеличения ошибок или коррекции ошибок, настраиваются после каждого сеанса упражнений, проводимого пациентом с применением сил регулирования ошибок.
Масштабирование в большую или меньшую сторону максимального параметра прикладываемой силы функции/профиля регулирования ошибок в соответствии с результативностью выполнения пациентом различных упражнений, выполняемых таким образом с помощью системы терапии двигательной функции, предназначено для определения оптимального максимального значения прикладываемой силы для конкретного пациента. Оптимальное максимальное значение прикладываемой силы, определенное для пациента, может затем использоваться в качестве постоянной силы, прикладываемой системой на участках увеличения или коррекции ошибок используемой таким образом функции/профиля регулирования ошибок. Путем адаптивной установки специального оптимального максимального значения прикладываемой силы в течение последовательных тренировочных сеансов конкретного проходящего лечение пациента, создается непрерывный процесс улучшения, который может запоминаться пациентом по мере того, как тело пациента адаптивно развивает соответствующие модели регулирования силы, необходимые для проведения тренировочных упражнений. Оптимальное максимальное значение прикладываемой силы, определенное для пациента в одном или более сеансах лечения, может использоваться в качестве заданного значения для будущего сеанса (сеансов) лечения, чтобы запускать модели регулирования силы, запомненные телом пациентом в последующих тренировочных сеансах, выполняемых таким образом.
Опционально, адаптивная настройка специализированного оптимального максимального значения прикладываемой силы может быть выполнена путем определения начального минимального значения прикладываемой силы для тренировочных упражнений, выполняемых с помощью системы двигательной терапии, использующей функцию/профиль регулирования ошибок, и, после каждого упражнения, увеличения минимального значения прикладываемой силы в соответствии с результативностью выполнения и прогрессом проходящего лечение пациента, до достижения определенного уровня силы, который является слишком сложным для тренировки проходящего лечение человека. Оптимальное максимальное значение прикладываемой силы может быть соответственно установлено в соответствии с определенным уровнем силы, который является слишком сложным для проходящего лечение человека.
Если после проведения заданного набора сеансов упражнений с силами, регулирования ошибок, определенная средняя ошибка не указывает на прогресс, лечение пациента прекращается по причине непригодности. В противном случае, если средняя ошибка, определенная для упражнения с силами регулирования ошибок, указывает на прогресс, выполняются дополнительные наборы сеансов упражнения с приложения и/или без приложения сил регулирования ошибок, для дальнейшей коррекции параметров функции регулирования ошибок, в частности, максимальный параметр прикладываемой силы и средние значения ошибки для упражнения с силами регулирования ошибок и/или без сил регулирования ошибок.
Опционально, но в некоторых вариантах осуществления предпочтительно, средние значения ошибок определяются из наборов абсолютных значений ошибок, указывающих на отклонения дискретных точек вдоль траекторий движений, выполняемых пациентом в трехмерном пространстве во время сеансов упражнений, от требуемой траектории, связанной с тренировочным упражнением, выполняемым с использованием системы. Например, абсолютные значения ошибок могут быть определены по расстояниям дискретных (выборочных) точек вдоль траекторий движений, выполняемых пациентом в трехмерном пространстве во время выполняемых сеансов упражнений. Альтернативно или дополнительно, абсолютные значения ошибок могут быть определены на основе измеренных сил, прикладываемых тренируемой частью тела в дискретные (выборочные) моменты времени во время выполняемых сеансов упражнений.
Один изобретательский аспект раскрытого в настоящей заявке объекта изобретения относится к системе для использования при восстановлении двигательной способности человека. В некоторых вариантах осуществления система содержит устройство приложения силы, выполненное с возможностью управляемого приложения силы заданного профиля по меньшей мере к части тела человека во время выполнения человеком упражнения, сенсорную систему, выполненную с возможностью отслеживания одного или более тренировочных сеансов упражнения, выполняемого по меньшей мере частью тела человека, и генерирования измерительных данных для отслеживаемых тренировочных сеансов, и систему управления, выполненную с возможностью обмена данными с сенсорной системой и с устройством приложения силы для управления устройством приложения силы для управляемого приложения силы заданного профиля по меньшей мере к части тела человека во время упражнения на основе измерительных данных, генерируемых сенсорной системой. Сенсорная система может быть выполнена с возможностью генерирования измерительных данных так, чтобы они выборочно включали в себя первые измерительные данные, содержащие относящиеся к ошибкам данные, и вторые измерительные данные, характеризующие адаптивную реакцию человека на силу, приложенную по меньшей мере к части тела человека.
Система управления в некоторых вариантах осуществления содержит: контроллер силы, выполненный с возможностью управления работой устройства приложения силы в соответствии с рабочими данными, так что профиль силы, прилагаемый к части тела, включает в себя мешающую составляющую силы и/или помогающую составляющую силы, определенные в соответствии с заданным диапазоном профиля/функции регулирования ошибок; и анализатор, выполненный с возможностью выборочного выполнения следующего: (i) предоставления данных о настройке силы, характеризующих максимальное значение прикладываемой силы для профиля/функции регулирования ошибок, по меньшей мере частично на основании относящихся к человеку данных применительно к указанному упражнению; (ii) анализа по меньшей мере одного из первых и вторых измерительных данных для определения данных, характеризующих настройку диапазона профиля/функции регулирования ошибок, и генерирования рабочих данных в контроллер силы, до тех пор, пока не будет идентифицировано заданное условие вторых измерительных данных, характеризующих адаптационную реакцию человека на приложенную силу.
Анализатор может быть выполнен с возможностью доступа к заранее сохраненным данным, содержащим данные о настройке силы, характеризующие максимальное значение прикладываемой силы для указанного профиля/функции регулирования ошибок, на основании относящихся к человеку данных применительно к указанному упражнению. Дополнительно или альтернативно, анализатор выполнен с возможностью анализа входных данных, содержащих относящиеся к человеку данные применительно к упражнению, и определения данных о настройке силы, характеризующих максимальное значение прикладываемой силы для указанного профиля/функции регулирования ошибок.
Сенсорная система содержит по меньшей мере одно устройство обнаружения движения, выполненное с возможностью определения модели движения, характеризующей выполнение человеком тренировочного сеанса, и, при идентификации ошибки в указанной модели движения, измерения указанной ошибки и генерирования первых измерительных данных, содержащих относящиеся к ошибкам данные. По меньшей мере одно устройство обнаружения движения выполнено с возможностью определения модели движения, характеризующей выполнение человеком тренировочного сеанса, путем отслеживания по меньшей мере одного из следующего: движения, выполняемого указанной по меньшей мере частью тела человека, и одного или более параметров или режимов рабочего устройства, используемого человеком во время тренировочного сеанса.
В некоторых вариантах осуществления сенсорная система содержит один или более датчиков, выполненных с возможностью определения ответной силы указанной части тела на силу, прикладываемую к ней, и генерирования вторых измерительных данных, характеризующих адаптационную реакцию человека. Указанные один или более датчиков сенсорной системы могут быть выполнены с возможностью непосредственного измерения ответной силы указанной части тела на силу, прикладываемую к ней, и/или измерения ответной силы через ее влияние на один или более параметров или режимов рабочего устройства, используемого человеком во время тренировочного сеанса.
Профиль/функция регулирования ошибок может содержать по меньшей мере одно из следующего:
• по меньшей мере один участок увеличения ошибок, определяющий диапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого предусмотрено приложение сил увеличения ошибок устройством приложения силы;
• по меньшей мере один постоянный диапазон увеличения ошибок по меньшей мере одного участка увеличения ошибок, определяющий поддиапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого силы увеличения ошибок, прикладываемые устройством приложения силы, постоянны;
• по меньшей мере один участок коррекции ошибок, определяющий диапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого предусмотрено приложение сил коррекции ошибок устройством приложения силы;
• по меньшей мере один постоянный диапазон коррекции ошибок по меньшей мере одного участка коррекции ошибок, определяющий поддиапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого силы коррекции ошибок, прикладываемые устройством приложения силы, постоянны;
• по меньшей мере один участок нечувствительности/свободный участок, определяющий диапазон значений ошибок, для которого не предусмотрено приложение сил устройством приложения силы;
• по меньшей мере один переходный участок, определяющий диапазон значений ошибок между указанным по меньшей мере одним участком нечувствительности и указанным по меньшей мере одним участком увеличения ошибок профиля/функции регулирования ошибок, для которого предусмотрено постепенное изменение сил, прикладываемых устройством приложения силы, в соответствии с переходом между указанными участком нечувствительности и участком увеличения ошибок;
• по меньшей мере один переходный участок, определяющий диапазон значений ошибок между указанным по меньшей мере одним участком нечувствительности и указанным по меньшей мере одним участком коррекции ошибок профиля/функции регулирования ошибок, для которого предусмотрено постепенное изменение сил, прикладываемых устройством приложения силы, в соответствии с переходом между указанными участком нечувствительности и участком коррекции ошибок;
• по меньшей мере одну функцию управления, определяющую профиль ослабления для профиля/функции регулирования ошибок, в соответствии с относительным прогрессом (по ходу тренировки) движения, выполняемым по меньшей мере частью тела человека. Опционально по меньшей мере одно из указанного по меньшей мере одного участка увеличения ошибок, указанного по меньшей мере одного постоянного диапазона увеличения ошибок, указанного по меньшей мере одного участка коррекции ошибок, указанного по меньшей мере одного постоянного диапазона коррекции ошибок, указанного по меньшей мере одного участка нечувствительности, указанного по меньшей мере одного переходного участка и/или указанной по меньшей мере одной функции управления, определяется анализатором на основании измерительных данных, и/или относящихся к человеку данных, и/или на основании входных данных пользователя.
Система может содержать базу данных для хранения относящихся к человеку данных, и/или данных о настройке силы, и/или профиля/функции регулирования ошибок.
Устройство приложения силы в некоторых вариантах осуществления содержит систему роботизированной руки, выполненную с возможностью обеспечения движения руки проходящего лечение человека по меньшей мере в одном из следующих направлений: вверх-вниз, влево-вправо и вперед-назад. Несущий поддон может быть соединен со свободным концом системы роботизированной руки и выполнен с возможностью поддержки пальмарной (ладонной) медиальной стороны руки проходящего лечение человека. Устройство ручного захвата может быть соединено с несущим поддоном и выполнено с возможностью захвата ладони и пальцев руки проходящего лечение человека для содействия таким образом в выполнении упражнения людьми с нарушением двигательной функции.
Датчик силы в некоторых вариантах осуществления используется для измерения сил, действующих/возникающих между задействованной в упражнении частью тела проходящего лечение человека и роботизированной рукой (в частности, между рукой/кистью проходящего лечение субъекта и устройством ручного захвата и/или несущим поддоном). Датчик силы может быть выполнен с возможностью соединения устройства ручного захвата и/или несущего поддона со свободным концом системы роботизированной руки. Опционально, а в некоторых вариантах осуществления предпочтительно, используется устройство определения силы захвата в устройстве ручного захвата, для измерения силы захвата ладонями и пальцами проходящего лечение человека указанного устройства ручного захвата и генерирования данных/сигналов, характеризующих ее. Может использоваться иммобилизирующий модуль в системе управления для остановки работы указанной системы в соответствии с сигналами/данными от устройства определения силы захвата, в частности, когда данные/сигналы от устройства определения силы захвата указывают на потерю/ослабление захвата рукой проходящего лечение человека устройства ручного захвата.
Система может содержать (карданный) шарнирный манипулятор, прикрепленный к свободному концу системы роботизированной руки и выполненный с возможностью обеспечения совершения устройством ручного захвата по меньшей мере одного из следующих движений: наклона, поворота относительно вертикальной плоскости и поворота относительно продольной оси. Может использоваться модуль нулевой гравитации в системе управления для управления устройством приложения силы для приложения сил противодействия гравитации к свободному концу системы роботизированной руки.
Другой изобретательский аспект раскрытого в настоящей заявке объекта изобретения относится к способу для использования при восстановлении двигательной способности человека. В некоторых вариантах осуществления способ включает в себя определение данных о настройке силы на основании относящихся к человеку данных, причем данные о настройке силы характеризуют максимальное значение прикладываемой силы, прикладываемое по меньшей мере к части тела человека в соответствии с заданным профилем/функцией регулирования ошибок, связанным с упражнением, выполняемым человеком; предоставление первых измерительных данных, содержащих относящиеся к ошибкам данные применительно к выполнению человеком упражнения, и вторых измерительных данных, характеризующих адаптационную реакцию человека на силу, приложенную по меньшей мере к части тела человека во время упражнения; и анализ по меньшей мере одного из первых и вторых измерительных данных для определения данных, характеризующих настройку диапазона профиля/функции регулирования ошибок, и генерирование рабочих данных в устройство приложения силы для приложения силы в пределах указанного диапазона профиля/функции регулирования ошибок, до тех пор, пока не будет идентифицировано заданное условие вторых измерительных данных, характеризующих адаптационную реакцию человека на приложенную силу.
Относящиеся к человеку данные могут содержать по меньшей мере одно из физического состояния, типа повреждения, возраста, веса, роста, пола, двигательных возможностей, адаптационной реакции.
В некоторых вариантах осуществления способ включает в себя обработку измерительных данных, содержащих относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого с приложением мешающих и/или помогающих сил, и, на основании этого, настройку по меньшей мере максимального значения прикладываемой силы профиля/функции регулирования ошибок. Альтернативно или дополнительно, способ включает в себя обработку измерительных данных, содержащих относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого без приложения сил, и, на основании этого, определение или настройку по меньшей мере одного параметра профиля/функции регулирования ошибок.
Способ может включать в себя определение или настройку, на основании обработанных данных, одного из следующего:
• по меньшей мере одного участка увеличения ошибок профиля/функции регулирования ошибок, в котором предусмотрена сила увеличения ошибок, прикладываемая по меньшей мере к части тела человека;
• по меньшей мере одного постоянного диапазона увеличения ошибок, определяющего поддиапазон значений ошибок в пределах участка увеличения ошибок, в котором предусмотрена постоянная сила увеличения ошибок, прикладываемая по меньшей мере к части тела человека;
• по меньшей мере одного участка коррекции ошибок профиля/функции регулирования ошибок, в котором предусмотрена сила коррекции ошибок, прикладываемая по меньшей мере к части тела человека;
• по меньшей мере одного постоянного диапазона коррекции ошибок, определяющего поддиапазон значений ошибок в пределах участка коррекции ошибок, в котором предусмотрена постоянная сила коррекции ошибок, прикладываемая по меньшей мере к части тела человека;
• по меньшей мере одного участка нечувствительности/свободного участка профиля/функции регулирования ошибок, в котором не предусмотрено приложение сил по меньшей мере к части тела человека;
• по меньшей мере одного переходного участка профиля/функции регулирования ошибок, в котором силы, прикладываемые по меньшей мере к части тела человека, постепенно изменяются в соответствии с изменениями значений ошибок относящихся к ошибкам данных.
Опционально, но в некотором варианте осуществления предпочтительно, силы увеличения и коррекции ошибок подлежат приложению в противоположных направлениях. Определение постоянных сил увеличения или коррекции ошибок может быть основано на определенном максимальном значении прикладываемой силы.
Опционально, по меньшей мере один участок нечувствительности/свободный участок профиля/функции регулирования ошибок определен для по существу малых значений относящихся к ошибкам данных. По меньшей мере один участок нечувствительности/свободный участок профиля/функции регулирования ошибок может быть определен между участками увеличения ошибок и коррекции ошибок функции регулирования ошибок, в которых предусмотрена постоянная сила, прикладываемая по меньшей мере к части тела человека.
В некоторых вариантах осуществления по меньшей мере один переходный участок профиля/функции регулирования ошибок определен между одним из участков нечувствительности и одним из участков увеличения или коррекции ошибок профиля/функции регулирования ошибок.
Способ может включать в себя определение, на основании относящихся к ошибкам данных, среднего значения ошибки для выполнения упражнения без приложения сил регулирования ошибок. Способ может дополнительно включать в себя обработку измерительных данных, содержащих относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого с силами регулирования ошибок, прикладываемыми в соответствии с профилем/функцией регулирования ошибок, и на основании этого определение по меньшей мере одного из адаптационной реакции человека и среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок. Способ может дополнительно включать в себя настройку определенного максимального значения прикладываемой силы на основании сравнения между определенным средним значением ошибки для выполнения упражнения с приложением и без приложения сил регулирования ошибок.
В некоторых вариантах осуществления способ включает в себя обработку измерительных данных, содержащих относящиеся к ошибкам данные, применительно к выполнению человеком дополнительного упражнения, выполняемого с силами регулирования ошибок, прикладываемыми в соответствии с профилем/функцией регулирования ошибок, и на основании этого определение по меньшей мере одного из адаптационной реакции человека и среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок. Способ может включать в себя повторение обработки измерительных данных, содержащих относящиеся к ошибкам данные применительно к выполнению человеком дополнительного упражнения, выполняемого с силами регулирования ошибок, прикладываемыми в соответствии с профилем/функцией регулирования ошибок, до тех пор, пока не произойдет одно из следующего: (i) определенная адаптационная реакция и/или среднее значение ошибки для выполнения упражнения с приложением сил регулирования ошибок станет указывать на требуемый приемлемый уровень прогресса в выполнении упражнения; или (ii) количество раз выполнения упражнения с приложением сил регулирования ошибок станет равно заданному числу.
Способ в некоторых вариантах осуществления включает в себя определение функции управления, сконфигурированной для постепенного ослабления сил регулирования ошибок, прикладываемых по меньшей мере к части тела человека во время упражнения, относительно расстояния от тела указанного человека.
Еще один изобретательский аспект раскрытого в настоящей заявке объекта изобретения относится к способу определения компетентности человека к лечению двигательной функции. Способ включает в себя предусматривание профиля/функции регулирования ошибок, определяющего силы регулирования ошибок, подлежащие приложению по меньшей мере к одной части тела человека во время выполнения упражнения, измерение относящихся к ошибкам данных применительно к выполнению человеком упражнения без приложения сил регулирования ошибок, определенных указанным профилем/функцией регулирования ошибок, и на основании этого определение среднего значения (eAV-) ошибки для выполнения упражнения без приложения сил регулирования ошибок, измерение относящихся к ошибкам данных применительно к выполнению человеком упражнения с приложением сил регулирования ошибок, определенных профилем/функцией регулирования ошибок, и на основании этого определение среднего значения (eAV+) ошибки для выполнения упражнения с приложением сил регулирования ошибок, и определение компетентности на основании отношения (eAV-/eAV+) между средними значениями ошибок, определенных для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок.
Способ в некоторых вариантах осуществления включает в себя использование отношения между средними значениями ошибок, определенными для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок, для определения уровня прогресса человека в выполнении упражнения, и причем компетентность указанного человека к лечению определяют всякий раз, когда указанный уровень прогресса выше некоторого заданного приемлемого значения (1/α) уровня прогресса.
Опционально, но в некоторых вариантах осуществления предпочтительно, способ включает в себя измерение множества относящихся к ошибкам данных применительно к соответствующему множеству выполнений человеком упражнения с приложением сил регулирования ошибок, определение соответствующего среднего значения ошибки для каждого из множества выполнений упражнения с приложением сил регулирования ошибок на основании их соответствующих измеренных относящихся к ошибкам данных, определение соответствующего уровня прогресса для каждого из множества выполнений упражнения на основании соответствующего среднего значения ошибки с приложением сил регулирования ошибок и среднего значения ошибки, определенного для выполнения упражнения без сил регулирования ошибок, и определение компетентности указанного человека к лечению, если по меньшей мере один из множества уровней прогресса выше заданного приемлемого значения уровня прогресса.
В возможных вариантах осуществления относящиеся к ошибкам данные связаны по меньшей мере с одним из следующего: отклонение (отклонения) по меньшей мере одной части тела от требуемой траектории во время упражнения/сеанса; и/или отклонение (отклонения) сил, прикладываемых по меньшей мере одной частью тела от требуемого профиля приложения сил во время упражнения/сеанса.
Еще один изобретательский аспект раскрытого в настоящей заявке объекта изобретения относится к системе определения компетентности человека к лечению двигательной функции, содержащей: устройство приложения силы, выполненное с возможностью управляемого приложения силы по меньшей мере к части тела человека во время выполняемого человеком упражнения; сенсорную систему, выполненную с возможностью отслеживания одного или более тренировочных сеансов упражнения, выполняемого указанной по меньшей мере частью тела человека, и выборочного генерирования измерительных данных; и систему управления, выполненную с возможностью обмена данными с сенсорной системой и с устройством приложения силы и содержащую: контроллер силы, выполненный с возможностью управления работой устройства приложения силы в соответствии с рабочими данными, так что сила, прикладываемая к части тела, включает в себя по меньшей мере одно из мешающей составляющей силы и помогающей составляющей силы, определенных в соответствии с заданным профилем/функцией регулирования ошибок; анализатор, выполненный с возможностью выборочного выполнения следующего: определения, на основе измерительных данных, относящихся к ошибкам данных, связанных с выполнением человеком упражнения без приложения сил регулирования ошибок, определенных указанным профилем/функцией регулирования ошибок; определения, на основе измерительных данных, среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок, определенных указанным профилем/функцией регулирования ошибок; и определения указанной компетентности на основании отношения между средними значениями ошибок, определенными для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок.
В некоторых вариантах осуществления относящиеся к ошибкам данные связаны с отклонением по меньшей мере части тела человека от требуемой траектории во время упражнения, выполняемого человеком, и/или отклонением силы, прикладываемой по меньшей мере частью тела человека во время упражнения, от требуемой модели силы. Сенсорная система может быть выполнена с возможностью генерирования измерительных данных с использованием по меньшей мере одного из следующего: датчика положения, акселерометра, измерителя скорости, съемочной камеры (в частности, формирователя изображений, видеокамеры или т.п.), датчика нагрузки, датчика давления, тензометрического датчика, амперметра, выполненного с возможностью измерения электрического тока электродвигателя в устройстве приложения силы, электромиографа (ЭМГ), поверхностного электромиографа, и/или внутримышечного электромиографа.
Еще один изобретательский аспект раскрытого в настоящей заявке объекта изобретения относится к системе для тренировки людей с нарушением двигательной функции, содержащей: устройство приложения силы, содержащее систему роботизированной руки, выполненную с возможностью управляемого приложения силы (в частности, в направлениях вверх-вниз, влево-вправо и вперед-назад) заданного профиля к руке тренируемого человека во время упражнения, выполняемого указанным человеком; (карданный) шарнирный манипулятор, соединенный со свободным концом системы роботизированной руки для обеспечения возможности выполнения по меньшей мере одного из следующих движений: наклона, поворота относительно вертикальной плоскости и поворота относительно продольной оси, во время упражнения; сенсорную систему, выполненную с возможностью отслеживания одного или более тренировочных сеансов упражнения, выполняемого рукой тренируемого человека, и генерирования измерительных данных для отслеживаемых тренировочных сеансов, и систему управления, выполненную с возможностью обмена данными с сенсорной системой и с устройством приложения силы для управления устройством приложения силы для управляемого приложения силы заданного профиля по меньшей мере к части тела человека во время упражнения на основе измерительных данных, генерируемых сенсорной системой. Сенсорная система и/или система управления может быть выполнена с возможностью осуществления любой из операций/функций, раскрытых выше и/или ниже по отношению к различным вариантам осуществления, раскрытых в настоящей заявке.
Следует отметить, что раскрытые в настоящей заявке варианты осуществления могут быть использованы и могут быть очень значимы для других потенциальных приложений, использующих методы увеличения ошибок, такие как используемые в определенных видах спорта, в армии, авиации и т.д.
Краткое описание чертежей
Чтобы понять изобретение и увидеть, как его можно осуществить на практике, далее будут раскрыты варианты осуществления только в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи. Признаки, показанные на чертежах, предназначены для иллюстрации только некоторых вариантов осуществления изобретения, если явно не указано иное. На чертежах одинаковые ссылочные позиции используются для обозначения соответствующих частей.
На фиг. 1 схематично проиллюстрирована система двигательной терапии согласно некоторым возможным вариантам осуществления.
На фиг. 2 схематично проиллюстрированы компоненты схем управления согласно некоторым возможным вариантам осуществления.
На фиг. 3 схематично проиллюстрирована блок-схема способа лечения согласно некоторым возможным вариантам осуществления.
На фиг. 4 схематично проиллюстрированы функция регулирования ошибок и человеко-машинный интерфейс (ЧМИ), применимый для настройки параметров, согласно некоторым возможным вариантам осуществления.
На фиг. 5 схематично проиллюстрировано адаптивное управление функции регулирования ошибок в отношении прогресса движения, согласно некоторым возможным вариантам осуществления, и ЧМИ, применимый для настройки его параметров.
На фиг. 6 продемонстрировано применение адаптивного управления, пример которого приведен на фиг. 5, к возможной функции/профилю регулирования ошибок.
На фиг. 7 схематично проиллюстрирована система двигательной терапии согласно некоторым возможным вариантам осуществления, содержащая систему роботизированной руки и (карданный) шарнирный манипулятор.
На фиг. 8 показан увеличенный вид (карданного) шарнирного манипулятора согласно некоторым возможным вариантам осуществления.
На фиг. 9 схематично проиллюстрированы компоненты системы двигательной терапии, системы роботизированной руки и (карданного) шарнирного манипулятора, согласно некоторым возможным вариантам осуществления.
Осуществление изобретения
Один или более конкретных и/или альтернативных вариантов осуществления настоящего раскрытия будут описаны ниже со ссылкой на чертежи, которые должны рассматриваться во всех аспектах только как иллюстративные и никоим образом не ограничивающие. Специалисту в данной области техники должно быть очевидно, что эти варианты осуществления могут быть реализованы на практике без таких конкретных деталей. В попытке предоставить лаконичное описание этих вариантов осуществления, не все признаки или детали фактического осуществления подробно раскрыты в описании. Элементы, проиллюстрированные на чертежах, не обязательно масштабированы или имеют правильные пропорции, что не критично. Вместо этого акцент делается на четкой иллюстрации принципов изобретения, так что специалисты в данной области техники смогут создавать и использовать методы двигательной терапии, как только они поймут принципы раскрытого в настоящей заявке объекта изобретения. Это изобретение может быть выполнено в других конкретных формах и вариантах осуществления без отклонения от существенных характеристик, раскрытых в настоящей заявке.
Настоящая заявка раскрывает методы двигательной терапии, использующие приложение сил увеличения и/или коррекции ошибок к задействованной в упражнении части тела проходящего лечение человека/пациента. Приложение этих сил увеличения/коррекции ошибок основано на функции/профиле регулирования ошибок, специально разработанной в соответствии с характеристиками пациента, и ее параметры могут непрерывно и адаптивно настраиваться в соответствии с результативностью и/или прогрессом, достигнутым пациентом в проведенных сеансах упражнений. Один или более начальных параметров функции/профиля регулирования ошибок могут быть определены на основе данных пациента, указывающих на состояние пациента, нарушение и/или общую информацию, связанную с ним (например, возраст, пол, вес, рост и т.д.). После этого один или более параметров функции/профиля регулирования ошибок настраиваются на основании данных измерения, полученных во время сеансов упражнений, проведенных с приложением или без приложения сил регулирования ошибок.
Раскрытые в настоящей заявке методы двигательной терапии полезны, но не ограничиваются ими, для роботизированных систем терапии, в которых задействованная в упражнении часть тела пациента соединена с одной или более роботизированными руками (обычно именуемыми в настоящей заявке как система роботизированной руки), выполненными с возможностью приложения к ней мешающих или помогающих сил во время сеансов упражнений. Сенсорная система используется для измерения данных/сигналов, характеризующих модели/ траектории движений, выполняемых задействованной в упражнении частью тела, и/или сил, прилагаемых ей во время сеансов упражнений. Измеренные данные/сигналы используются для определения ошибок/отклонений выполняемых моделей/траекторий движения относительно моделей/траекторий движения, ожидаемых/требуемых для упражнения, выполняемого пациентом. Определенные ошибки/отклонения используются для настройки одного или более параметров функции/профиля регулирования ошибок. Таким образом, силы регулирования ошибок, прикладываемые во время каждого сеанса упражнения, выполняемого пациентом, постоянно адаптируются к результативности и прогрессу пациента.
Для обзора нескольких примерных признаков, этапов способа и принципов изобретения, на фигурах схематично проиллюстрированы примеры роботизированной системы терапии. Эта роботизированная система показана как один пример реализации, который демонстрирует ряд признаков, способов и принципов, используемых для построения и адаптации схем двигательной терапии с регулированием ошибок, раскрытых в настоящей заявке, которые также могут быть применимы для других приложений и в различных вариантах. Следовательно, это описание будет продолжено со ссылкой на показанные примеры, но с пониманием того, что изобретение, изложенное в формуле изобретения ниже, также может быть реализовано множеством других способов, как только принципы будут поняты из описаний, пояснений и чертежей в настоящей заявке. Все такие вариации, а также любые другие модификации, очевидные для среднего специалиста в данной области и применимые в приложениях двигательной терапии, могут быть подходящим образом использованы, и предполагается, что они попадают в объем настоящего раскрытия.
На фиг. 1 схематично проиллюстрирована система 10 двигательной терапии, содержащая в некоторых вариантах осуществления систему 13 управления, соединенную с сенсорной системой 11 и с устройством 12 приложения силы (исполнительными механизмами). Устройство 12 приложения силы выполнено с возможностью приложения сил к части тела (например, конечности/руке) 15 проходящего лечение пациента с помощью одного или более роботизированных рычагов а1, а2, … (в совокупности называемых в настоящей заявке роботизированной рукой или рычагами ai, где i>0 - целое число), механически соединенными с одним или более электродвигателями m1, m2, … (в совокупности называемых в настоящей заявке двигателем или двигателями mi, где i>0 - целое число). В этом конкретном и неограничивающем примере задействованная в упражнении часть 15 тела прикреплена к одному из роботизированных рычагов (а2) с помощью регулируемого петлевого ремня 14, но в других возможных вариантах осуществления задействованная в упражнении часть 15 тела может быть помещена в другие средства крепления, соединенные с роботизированными рычагами ai, или просто используемых для захвата свободного конца роботизированной руки ai.
Сенсорная система 11 содержит одно или более сенсорных устройств (не показаны), выполненных с возможностью измерения различных параметров, характеризующих положение, скорость, ускорение и/или давление, связанных с задействованной в упражнении частью 15 тела и/или роботизированными рычагами ai, во время упражнений, выполняемых пациентами. Один или более датчиков сенсорной системы 11 могут быть выполнены с возможностью определения моделей/траекторий движения задействованной в упражнении части 15 тела и/или рычагов ai, и/или измерения сил, прикладываемых к рычагам ai задействованной в упражнении частью 15 тела, например, в качестве части упражнения, выполняемого таким образом, и/или в ответ на силы, приложенные к ней системой. Один или более датчиков сенсорной системы 11 могут быть выполнены с возможностью непосредственного измерения ответной силы задействованной в упражнении части 15 тела и/или измерения ответной силы через ее влияние на один или более параметров или режимов рабочего устройства (не показано), используемого пациентом (также называемым в настоящей заявке проходящим лечение человеком или просто человеком) во время тренировочного сеанса.
Сенсорная система 11 может быть, по меньшей мере частично, интегрирована в устройство 12 приложения силы, с возможностью использовать тензометрические датчики, датчики нагрузки и/или датчики давления для измерения сил, прикладываемых задействованной в упражнении частью тела к роботизированным рычагам ai, и/или датчики положения/движения (например, потенциометры, гироскопические датчики) и/или акселерометры для измерения их положений, скоростей и/или ускорений. По меньшей мере часть сенсорного оборудования сенсорной системы 11 может быть выполнена с возможностью дистанционного обнаружения, т.е. не находиться в непосредственном контакте с задействованной в упражнении частью тела и/или компонентами устройства 12 приложения силы, в частности, с использованием формирователей изображений/камер для генерирования данных изображения для определения положения, скорости и/или данных/сигналов ускорения и/или амперметры/вольтметры для измерения электрических токов/напряжений двигателей mi и определения на их основе сил, прикладываемых к рычагам ai задействованной в упражнении частью 15 тела во время выполняемых упражнений. В возможных вариантах осуществления сенсорная система 11 по меньшей мере частично интегрирована в систему 13 управления. Опционально, сенсорная система 11 является независимой автономной системой, выполненной с возможностью работы отдельно от системы 13 управления и/или сенсорной системы 11.
В возможных вариантах осуществления сенсорная система 11 содержит один или более сенсорных элементов, непосредственно соединенных/прикрепленных к телу пациента для измерения сил, прикладываемых им во время упражнений, выполняемых задействованной в упражнении частью 15 тела. Например, но без ограничения, один или более электромиографов (ЭМГ), поверхностных ЭМГ и/или внутримышечных ЭМГ, сенсорных элементов могут быть прикреплены к телу пациента для генерирования данных/сигналов измерений, характеризующих мышечную активность/сокращения в теле пациента, и сил, прикладываемых пациентом во время упражнений, выполняемых задействованной в упражнении частью 15 тела.
Система 13 управления выполнена с возможностью приема и обработки данных/сигналов 11m измерения, генерируемых системой 11 обнаружения, непрерывного/периодического определения положения, скорости и/или ускорения задействованной в упражнении части 15 тела проходящего лечение человека и/или роботизированных рычагов ai, и/или определения давлений/сил, прикладываемых задействованной в упражнении частью 15 тела к роботизированным рычагам ai, и, опционально, их соответствующих временных профилей, и на основе этого генерирования управляющих данных/сигналов 13с для управления устройством 12 приложения силы соответственно.
В возможных вариантах осуществления устройство 12 приложения силы выполнено с возможностью управляемого приложения сил заданных профилей к части 15 тела во время выполняемого таким образом терапевтического упражнения/сеанса. Сенсорная система 11 может быть выполнена с возможностью отслеживания одного или более тренировочных сеансов задействованной в упражнении части 15 тела проходящего лечение человека и выборочного генерирования первых измерительных данных/сигналов, характеризующих относящиеся к ошибкам данные, и вторых измерительных данных/сигналов, характеризующих адаптационную реакцию проходящего лечение человека на силу, приложенную к задействованной в упражнении части 15 тела проходящего лечение человека.
Система 13 управления выполнена с возможностью обмена данными/сигналами с сенсорной системой 11 и с устройством 12 приложения силы, обработки первых и вторых измерительных данных/сигналов (11m), генерируемых сенсорной системой 11, для определения на их основе относящихся к ошибкам данных и адаптационной реакции проходящего лечение человека на выполняемое им упражнение, и, соответственно, генерирования управляющих данных/сигналов 13 с для управления устройством 12 приложения силы для настройки силы, прикладываемой таким образом к задействованной в упражнении части 15 тела. Таким образом, в некоторых вариантах осуществления система 13 управления содержит один или более процессоров 13u и (энергозависимую и/или энергонезависимую) память 13m, выполненную с возможностью хранения и выполнения программных инструкций для управления системой 10 и хранения и обработки данных 11m измерения от сенсорной системы 11. Система 13 управления также содержит интерфейс 13i связи (ИС), выполненный с возможностью обмена данными/сигналами с соответствующими интерфейсами связи (ИС) сенсорной системы 11 и/или устройства 12 приложения силы.
Также может быть предусмотрен модуль 13h человеко-машинного интерфейса (ЧМИ) для предоставления информации, связанной с проводимыми сеансами лечения и/или проходящим лечение человеком, в частности, на устройстве отображения (не показано). ЧМИ 13h может быть выполнен с возможностью приема входной информации от пользователя/практикующего врача с помощью его одного или более устройств ввода (не показаны, в частности, клавиатуры, указательного устройства/мыши, сенсорного экрана или т.п.). ЧМИ 13h может быть частью системы 13 управления или отдельной системы, электрически соединенной (в частности, по проводам/линиям обмена данными/сигналами или беспроводным способом) с системой 13 управления.
Связь между системой 13 управления и сенсорной системой 11 и/или устройством 12 приложения силы может осуществляться беспроводным способом (в частности, Wi-Fi, Bluetooth, Zigbee) и/или по линиям/проводам обмена данными/сигналами (в частности, последовательная/параллельная шина данных с использованием USB, UART, ETHERNET или т.п.). Следует отметить, что связь, обозначенная на фиг. 1 двухсторонними линиями со стрелками, может быть двунаправленной, но в возможных вариантах осуществления она может быть однонаправленной. Например, но без ограничения, связь между сенсорной системой 11 и системой 13 управления может быть сконфигурирована для передачи данных 11m измерения в систему 13 управления, а связь между устройством 12 приложения силы и системой 13 управления может быть сконфигурирована для передачи управляющих данных/сигналов от системы 13 управления в устройство 12 приложения силы.
В некоторых вариантах осуществления система 13 управления содержит контроллер 13f силы, выполненный с возможностью управления работой устройства 12 приложения силы в соответствии с рабочими данными, генерируемыми блоком 13 управления, в соответствии с данными/сигналами 11m измерения, генерируемыми сенсорной системой 11. Например, но без ограничения, контроллер 13f силы может быть выполнен с возможностью определения, на основе рабочих данных, настроек для сил, прикладываемых устройством 12 приложения силы к задействованной в упражнении части 15 тела, и генерирования соответствующих управляющих данных/сигналов 13с в устройство 12 приложения силы для увеличения (или уменьшения) сил, прикладываемых таким образом к задействованной в упражнении части 15 тела, в соответствии с заданным диапазоном профиля/функции регулирования ошибок. Например, контроллер 13f силы может быть выполнен с возможностью генерирования управляющих данных/сигналов 13с для постепенного увеличения (или уменьшения) сил, прикладываемых устройством 12 приложения силы в ответ на первые и/или вторые измерительные данные/сигналы до тех пор, пока не будет достигнут определенный максимальный или минимальный (например, ноль, отсутствие силы) уровень прикладываемой силы.
Система 13 управления может использовать модуль 13а анализатора, выполненный с возможностью выборочного предоставления данных коррекции силы, характеризующих максимальное значение (значения) прикладываемой силы, которое должно использоваться с профилем/функцией регулирования ошибок, на основе записи 14d относящихся к человеку (пациенту) данных, связанной с выполняемым упражнением. Дополнительно или альтернативно, модуль 13а анализатора может быть выполнен с возможностью анализа по меньшей мере одного из первых и вторых измерительных данных/сигналов для определения на их основе данных, характеризующих настройку диапазонов профиля/функции регулирования ошибок, и генерирования на их основе рабочих данных, используемых контроллером 13f силы для генерирования управляющих данных/сигналов 13с в соответствии с используемым профилем/функцией регулирования ошибок, до тех пор, пока не будет выявлено заданное условие, связанное со вторыми измерительными данными, характеризующими адаптационную реакцию проходящего лечение человека на силы, прикладываемые устройством 12 приложения силы.
Например, модуль 13а анализатора может быть выполнен с возможностью определения, на основе данных 11 т измерения, полученных от сенсорной системы 11, моделей/траекторий движения, выполняемых задействованной в упражнении частью 15 тела, и сил, прилагаемых таким образом во время тренировочного сеанса, имеющего заданную траекторию движения (и/или связанного с ними временного интервала (интервалов)). Модуль 13а анализатора сравнивает определенные модели/траектории движения и/или силы, прикладываемые пациентом (и/или, опционально, временные интервалы, связанные с ними), с требуемыми моделями/траекториями движения и/или силами (и/или, опционально, требуемыми временными интервалами (или требуемыми диапазонами временных интервалов) для выполнения тренировочного сеанса, и на основе этого определения ошибок/отклонений для моделей/траекторий движения, выполняемых задействованной в упражнении частью 15 тела. Определенные ошибки/отклонения могут затем использоваться модулем 13а анализатора для настройки параметров функции регулирования ошибок, используемой для тренировочного сеанса, выполняемого посредством системы 10.
Затем тренировочный сеанс можно повторить с использованием функции регулирования ошибок с вновь определенными параметрами, для определения таким образом соответствующих новых ошибок/отклонений от требуемых моделей/траекторий движения и/или приложенных сил, для отслеживания результативности и прогресса пациента. Этот процесс адаптивного тренировочного сеанса можно непрерывно повторять заданное количество раз или до тех пор, пока определенные ошибки/отклонения, определенные для шаблонов/траекторий движения и/или приложенной силы, не станут приемлемо малыми.
Запись 14d данных пациента может храниться локально в памяти 13m системы 13 управления и/или в базе 14 данных, доступной для системы 13 управления. База 14 данных также может быть частью системы 13 управления, но в возможных вариантах осуществления она используется и поддерживается как отдельная (например, удаленная) система базы данных (например, сервер базы данных, облачный центр обработки данных или т.п.), доступная через стандартные каналы обмена данными, в частности, локальную сеть (Ethernet), Интернет или т.п. Запись 14d данных пациента может содержать исходную информацию о пациенте, относящуюся к проходящему лечение человеку, например, но без ограничения, возраст, пол, вес, рост и т.п., и/или информацию, относящуюся к физическому состоянию и/или физическим расстройствам проходящего лечение человека, включая, без ограничения, доминирование проходящей лечение части тела (в частности, конечности, руки), предварительную оценку двигательных способностей пациента и/или нарушений и т.п.
Опционально, но в некоторых вариантах осуществления предпочтительно, данные пациента содержат данные о настройке силы, характеризующие максимальную прикладываемую силу, подлежащую приложению системой 10 в сеансах лечения пациента. Данные о настройке силы могут содержать параметры функции/профиля регулирования ошибок, определенные практикующим врачом, в частности, на основании диагноза пациента, и/или на основе исходной информации о пациенте, и/или ранее проведенных тренировочных сеансах, проведенных с помощью системы 10. Система 13 управления может быть выполнена с возможностью записи в записи 14d данных пациента настроенных/новых профилей приложения силы, которые могут содержать настроенные/новые параметры регулирования силы/ошибок, определенные модулем 13а анализатора во время одного или более сеансов лечения, проведенных с помощью системы 10, максимальные прикладываемые силы, подлежащие использованию для увеличения и/или коррекции ошибок, и/или данные, характеризующие прогресс проходящего лечение человека в каждом сеансе лечения. Запись 14d данных пациента может содержать набор различных функций/профилей регулирования ошибок, адаптированных для конкретного пациента и подлежащих использованию в соответствующих различных упражнениях, выполняемых пациентом с помощью системы 10.
Модуль 13а анализатора может быть выполнен с возможностью доступа к записи 14d данных пациента и извлечения из нее параметров функции/профиля регулирования ошибок (в частности, максимального значения прикладываемой силы) для использования в конкретном упражнении, подлежащем выполнению пациентом в сеансе лечения. Модуль 13а анализатора может быть выполнен с возможностью приема и анализа входных данных 13d, полученных от практикующего врача (в частности, посредством блока 13h ЧМИ) и/или на основе записи 14d данных. Входные данные 13d могут содержать относящиеся к человеку данные, связанные с конкретным упражнением, подлежащим выполнению пациентом с использованием системы 10. Модуль 13а анализатора может быть выполнен с возможностью определения, на основании принятых входных данных 13d, данных настройки силы, характеризующих максимальное значение прикладываемой силы, подлежащее использованию для профиля/функции регулирования ошибок.
Сенсорная система 11 и/или модуль 13а анализатора могут быть выполнены с возможностью обработки данных/сигналов измерения от сенсорной системы 11 (в частности, датчика движения), характеризующих движения, выполняемые задействованной в упражнении частью 15 тела, и/или силы, прикладываемые ей, и определения на основании этого моделей приложения движения и/или силы, характеризующих результативность пациента в одном или более тренировочных сеансах. Модели движения и/или приложения силы могут быть определены путем отслеживания движения, выполняемого и/или сил, прилагаемых задействованной в упражнении частью 15 тела, и/или с использованием одного или более параметров или режимов рабочего устройства, используемого пациентом во время тренировочного сеанса. Определенные модели движения и/или приложения силы могут использоваться сенсорной системой 11 и/или модулем 13а анализатора для идентификации ошибок/отклонений от требуемого движения и/или моделей приложения силы. Эти ошибки/отклонения можно измерить с течением времени и использовать для генерирования первых измерительных данных, содержащих относящиеся к ошибкам данные.
Система 10 двигательной терапии может быть реализована на основе вариантов осуществления и/или компонентов оборудования, раскрытых в международной патентной публикации №WO 2004/096501 того же правопреемника, содержание которой включено в настоящий документ путем отсылки.
На фиг. 2 показана блок-схема, схематически иллюстрирующая схему управления, которую может использовать система 13 управления согласно некоторым возможным вариантам осуществления. В этом неограничивающем примере система управления выполнена с возможностью приема или построения программы 21 тренировки, содержащей одно или более упражнений, подлежащих выполнению задействованной в упражнении частью (15) тела. Каждое упражнение программы 21 тренировки может включать в себя данные о требуемом/ожидаемом движении и/или модели/траектории приложения силы, связанные с соответствующим упражнением и характеризующие ожидаемые направления требуемой модели движения. Программа 21 тренировки может быть построена системой управления на основе записи 14d данных пациента или практикующим врачом, работающим с системой 10, в частности, посредством ЧМИ 13h. Альтернативно или дополнительно, программа 21 тренировки может храниться в записи 14d данных пациента и время от времени обновляться системой управления и/или модулем 25 настройки параметров системы 13 управления.
Система 13 управления содержит модуль 22 управления ошибками, выполненный с возможностью определения рабочих данных/сигналов 22d, характеризующих силы, подлежащие приложению к задействованной в упражнении части (15) тела. Модуль 22 управления ошибками может быть выполнен с возможностью определения рабочих данных/сигналов 22d на основе информации из записи 14d данных пациента, в частности, функции/профиля регулирования ошибок и относящихся к ошибкам данных 13е, характеризующих мгновенные отклонения движения задействованной в упражнении части (15) тела от требуемой траектории. Например, модуль 22 управления ошибками может быть выполнен с возможностью определения величины и направления сил, прикладываемых системой к задействованной в упражнении части (15) тела, относительно ожидаемых данных траектории/движения программы 21 тренировки, и на основании этого может определять рабочие данные/сигналы 22d, характеризующие силы регулирования ошибок, подлежащие приложению к задействованной в упражнении части (15) тела с помощью роботизированных рычагов ai во время упражнения. Рабочие данные/сигналы 22d от объединителя 24 принимают в контроллере 13f силы, в котором они используются модулем 23 управления приводами для генерирования управляющих данных/сигналов 13с для активации устройства 12 приложения силы соответственно, которое приводит в действие роботизированные рычаги ai, для приложения соответствующих сил регулирования ошибок к задействованной в упражнении части 15 тела вдоль требуемой модели/ траектории движения и в пределах требуемого временного профиля.
Например, модуль 22 управления ошибками может быть выполнен с возможностью использования функции/профиля регулирования ошибок для определения, на основании относящихся к ошибкам данных 13е, величины сил регулирования ошибок, подлежащих приложению к задействованной в упражнении части (15) тела, и того, должны ли эти силы регулирования ошибок быть силами увеличения или коррекции ошибок. Если определено, что должны быть приложены силы увеличения ошибок, то рабочие данные/сигналы 22d, генерируемые модулем 22 управления ошибками, конфигурируются для приложения сил регулирования ошибок, имеющих определенную величину, направленных радиально от желаемой траектории программы 21 тренировки. С другой стороны, если определено, что должны быть приложены силы коррекции ошибок, то рабочие данные/сигналы 22d, генерируемые модулем 22 управления ошибками, конфигурируются для приложения сил регулирования ошибок, имеющих определенную величину, направленных радиально в направлении желаемой траектории программы 21 тренировки.
По мере того как упражнение выполняется проходящим лечение человеком, сенсорная система 11 генерирует данные/сигналы 11m измерения, характеризующие движение, выполняемое задействованной в упражнении частью 15 тела во время упражнения, которые вводятся в систему 13 управления. Данные 11m измерения обрабатываются модулем 13а анализатора для определения фактического движения, выполняемого задействованной в упражнении частью 15 тела, и/или положения задействованной в упражнении части 15 тела во время упражнения, и данных 13е ошибок, характеризующих отклонения фактического выполняемого движения от требуемой модели/траектории движения, а также направление и величину каждой ошибки/отклонения и/или сил, приложенных задействованной в упражнении частью тела, во время упражнения. Данные 13е ошибок, определенные модулем 13а анализатора, могут использоваться модулем 25 настройки параметров для настройки одного или более параметров функции/профиля регулирования ошибок, используемых модулем 22 регулирования ошибок. Параметры, настраиваемые модулем 25 настройки параметров, могут быть записаны в записи 14d данных пациента для настройки функции/профиля регулирования ошибок, подлежащих использованию в следующем сеансе упражнений системы 10, в соответствии с результативностью и прогрессом проходящего лечение пациента. Опционально, модуль 25 настройки параметров и/или модуль 22 управления ошибками являются неотъемлемой частью модуля 13а анализатора или контроллера 13f силы.
В некоторых вариантах осуществления контроллер силы выполнен с возможностью приема данных/сигналов измерения непосредственно от сенсорной системы 11, как показано на фиг. 2 пунктирными линиями, для непрерывной/периодической настройки сил, прикладываемых роботизированной рукой (рычагами) ai к проходящей лечение части (15) тела. Например, контроллер 13f силы может быть выполнен с возможностью непрерывного/периодического приема данных/сигналов от сенсорной системы 11, характеризующих силу (Fapplied), прилагаемую проходящей лечение частью (15) тела проходящего лечение человека r роботизированной руке (рычагам) ai, и, соответственно, настройки управляющих данных/сигналов 13с, генерируемых модулем 2 управления приводами, тем самым приводя в действие устройство 12 приложения силы в 12, чтобы гарантировать, что требуемые силы будут приложены системой, в соответствии с рабочими данными/сигналами 22d от модуля 22 управления ошибками. Таким образом, формируется внутренний замкнутый контур обратной связи, гарантирующий в реальном времени, что требуемые силы регулирования ошибок прикладываются системой к проходящей лечение части тела.
Например, в некоторых вариантах осуществления контроллер 13f силы выполнен с возможностью реализации схемы управления силой, в которой данные/сигналы 13с, генерируемые модулем 23 управления приводами, управляют устройством 12 приложения силы для приложения сил для перемещения роботизированных рычагов (руки) ai в направлениях сил Fapplied, прикладываемых проходящем лечение человеком к роботизированным рычагам ai, как измерено сенсорной системой 11, в частности, с использованием датчика 71f силы/нагрузки, показанного на фиг. 8 и 9. Соответственно, в схеме управления силой роботизированные рычаги ai непрерывно перемещаются системой в направлениях сил (Fapplied), которые к ним прикладывает проходящий лечение субъект. Как видно на фиг. 2, движения роботизированных рычагов ai, на которые воздействует схема управления усилием, могут быть настроены так, чтобы они включали в себя силы регулирования ошибок в соответствии с рабочими данными/сигналами 22d, генерируемыми модулем 22 управления ошибками в соответствии с отклонениями/ошибками в траектории, выполняемой проходящем лечение пациентом во время сеанса упражнения.
На фиг. 3 показана блок-схема способа 30 лечения, применимого в сочетании с системой 10 двигательной терапии. Способ 30 начинается на этапе S1, на котором новые данные пациента извлекают и обрабатывают с помощью системы (10), в частности, из памяти 13 т или из записи 14d данных пациента, принятой из базы 14 данных. На этапе S2 система (10) определяет, на основе извлеченных данных пациента (в частности, способности пациента прикладывать силу задействованной в упражнении частью тела, возраста, пола, доминирования части тела и т.д.), программу тренировки, предварительную функцию/профиль и/или параметры регулирования ошибок, и начальную (безопасную) максимальую прикладываемую силу fMAX для функции/профиля регулирования ошибок, подлежащей использованию системой (10) двигательной терапии в сеансе (сеансах) упражнений, подлежащем выполнению.
Система (10) определяет на этапе S3 диагноз адаптационной реакции для пациента в ответ на приложенные силы, посредством выполнения диагностического сеанса упражнений. На этом этапе пациенту дают команду перемещать роботизированные рычаги ai и выполнять заданные модели/траектории движения, в то время как система (10) управляет устройством (12) приложения силы для приложения различных (мешающих или помогающих) сил рычагами ai. Данные (11m) измерений, генерируемые сенсорной системой (11), в ответ на движения задействованных в упражнении частей (15) тела, затем обрабатываются и анализируются для определения адаптационной реакции пациента, на основе значений ошибок, которые могут варьироваться в зависимости от приложения различных сил системой (10). Значения ошибок могут быть определены путем сравнения нагрузок/давлений, измеренных сенсорной системой (11) во время сеанса диагностических упражнений, с заданными значениями, или относительно истории приложения силы системой (10), или относительно силы, приложенной системой на предыдущем тренировочном сеансе (сеансах).
Диагностика адаптационной реакции, определенная на этапе S3, используется на этапе S4 для настройки одного или более параметров функции/профиля регулирования ошибок, таких как, но не ограничиваясь этим, исходная максимальная прикладываемая сила fMAX, определенная для функции/профиля регулирования ошибок на этапе S2, и/или значения уставки, показанные на фиг. 4 (свободная зона, и/или линейное увеличение, и/или постоянный уровень, и/или отрицательная сила, и/или отрицательный наклон, и/или нейтраль, и/или линейное уменьшение).
На этапе S5 система 10 выполняет один или более тренировочных сеансов для тренировки части 15 тела без приложения сил регулирования ошибок. На этом этапе проходящему лечение пациенту дается указание системой (например, посредством ЧМИ 13h) и/или практикующим врачом выполнять определенные движения частью 15 тела, когда она соединена с рычагами ai, без приложения сил устройством 12 приложения силы системы 10, с измерением сенсорной системой 11 сил, прикладываемых человеком, и выполняемой таким образом модели/траектории движения. Затем система вычисляет значения ошибок путем сравнения выполненной модели/траектории движения и/или приложенных сил, определяемых на основе данных 11 т измерения, с моделью/траекторией движения и/или приложением силы, ожидаемых для определенных движений, которые указано выполнять проходящим лечение человеком, и затем соответствующим образом определяют среднюю ошибку eAV- для задействованной в упражнении части 15 тела без приложения сил регулирования ошибок системой 10. Опционально, но в некоторых вариантах осуществления предпочтительно, средняя ошибка eAV-, определенная для пациента, выполняющего упражнения без сил регулирования ошибок, определяется на основе расстояний, измеренных в трехмерном пространстве задействованной в упражнении части тела относительно требуемой траектории/положений, связанных с упражнением, выполняемым пациентом.
Значения ошибок и/или средняя ошибка eAV-, вычисленные на этапе S5, используются на этапе S6 для настройки диапазонов функции/профиля регулирования ошибок, подлежащей использованию на этапе S7, на котором один или более тренировочных сеансов выполняются с приложением сил регулирования ошибок. На этапе 6 могут выполнять настройку параметров функции/профиля регулирования ошибок, используемой системой, в частности, максимальной прилагаемой силы fMAX и/или значений уставки, показанных на фиг. 4, в частности, свободная зона, и/или линейное увеличение, и/или постоянный уровень, и/или отрицательная сила, и/или отрицательный наклон, и/или нейтраль, и/или линейное уменьшение.
В некоторых вариантах осуществления этапы S3 и S4 не используются в способе 30. В таких вариантах осуществления исходная функция регулирования ошибок и ее исходные параметры, определяемые на этапе S2, настраиваются на этапах S5 и S6.
После завершения одного или более тренировочных сеансов на этапе S7, система определяет, на основе данных 11m измерения, полученных для выполненных тренировочных сеансов, ошибок/отклонений, произошедших в выполненных тренировочных сеансах, относительно требуемой/ожидаемой модели/траектории движения, и/или профилей приложения силы. Система может определять, на основе ошибок/отклонений, по меньшей мере одно из адаптационной реакции пациента и средней ошибки eAV+ для задействованной в упражнении части 15 тела с приложением сил регулирования ошибок системой 10. Определение ошибок/отклонений может быть, по меньшей мере частично, основано на сравнении нагрузок и/или временных профилей, измеренных сенсорной системой 11 во время тренировочного сеанса с заданными значениями нагрузки и/или временными профилями, ожидаемыми для тренировочного сеанса, выполняемого пациентом, и/или относительно значений нагрузки, измеренных сенсорной системой в предыдущих тренировочных сеансах. Опционально, но в некоторых вариантах осуществления предпочтительно, ошибки/отклонения, используемые для определения средней ошибки eAV+, определяются на основе расстояний, измеренных в трехмерном пространстве задействованной в упражнении части тела относительно требуемой траектории тренировочного упражнения, выполняемого пациентом.
На этапе S8 проверяют, превышает ли средняя ошибка eAV+, определенная для тренировки части 15 тела с приложением сил регулирования ошибок на этапе S7, среднюю ошибку eAV-, определенную для тренировки части 15 тела без приложения сил регулирования ошибок. Максимальная прикладываемая сила fMAX, полученная для функции/профиля регулирования ошибок на этапе S6 (или fMAX, определенная на этапе S2, если этапы S3 и S4 пропущены), затем настраивается в соответствии с проверкой этапа S8. В частности, если на этапе S8 определяют, что средняя ошибка eAV+, полученная с приложением сил регулирования ошибки, больше, чем средняя ошибка eAV-, полученная без приложения сил регулирования ошибок, то на этапе S9 максимальная прикладываемая сила fMAX уменьшается в масштабе на заданный коэффициент масштабирования. Иначе, если на этапе S8 определяют, что средняя ошибка eAV+, полученная с приложением сил регулирования ошибки, меньше, чем средняя ошибка eAV-, полученная без приложения сил регулирования ошибок, то на этапе S10 максимальная прикладываемая сила fMAX увеличивается в масштабе на заданный коэффициент масштабирования.
Например, коэффициент уменьшения масштаба, используемый на этапе S9, обычно может находиться в диапазоне от 0,5 до 0,9, а коэффициент увеличения масштаба, используемый на этапе S10, обычно может находиться в диапазоне от 1,1 до 1,5. В качестве альтернативы, коэффициенты масштабирования могут быть определены или адаптированы в соответствии с записью 14d относящихся к человеку (пациенту) данных. Несмотря на то, что один и тот же коэффициент масштабирования может использоваться для уменьшения масштаба на этапе S9 и для увеличения масштаба на этапе S10, в возможных вариантах осуществления конкретный коэффициент уменьшения масштаба может быть установлен для этапа S9, а конкретный другой коэффициент увеличения масштаба может быть установлен для этапа S10.
Опционально, но в некоторых вариантах осуществления предпочтительно, коэффициент масштабирования, используемый на этапах S9 и/или S10, определяется системами в соответствии с определенной средней ошибкой eAV+, полученной с приложением сил регулирования ошибок, и/или заранее определенной средней ошибкой eAV+, полученной с приложением силы регулирования ошибок, и/или средней ошибкой eAV-, полученной без приложения силы регулирования ошибки. Например, коэффициент масштабирования может быть определен на основе отношения между текущей средней ошибкой eAV+(j) и предыдущей средней ошибкой eAV+(j-1), полученных с приложением сил регулирования ошибок, или на основе отношения между текущей средней ошибкой eAV+ и средней ошибкой eAV-, полученных без приложения сил регулирования ошибок.
После того, как максимальная прикладываемая сила fMAX, определенная для функции/профиля регулирования ошибок, будет уменьшена в масштабе на этапе S9 или увеличена в масштабе на этапе S10, на этапах S11-S14 выполняется набор дополнительных тренировочных сеансов с приложением сил регулирования ошибок. В этих дополнительных тренировочных сеансах система определяет для каждого тренировочного сеанса, выполняемого на этапе S11, соответствующие ошибки/отклонения от ожидаемой результативности (в частности, на основе расстояний в трехмерном пространстве задействованной в упражнении части тела от требуемой траектории) и соответствующее новое измерение адаптационной реакции и/или новую среднюю ошибку eAV+ для тренировочных сеансов, проводимых с приложением определенных сил регулирования ошибок. После каждого дополнительного тренировочного сеанса на этапе S11 максимальная прикладываемая сила fMAX, определенная для функции/профиля регулирования ошибок, уменьшается в масштабе на этапе S12 на тот же коэффициент масштабирования, который использовался на этапе S9 и/или S10, или на другой коэффициент масштабирования, специально определенный для повторяющегося набора тренировочных сеансов, для постепенного уменьшения мешающих (и/или помогающих) сил, прикладываемых системой 10 во время упражнений.
На этапе S13 затем проверяется, был ли достигнут приемлемый уровень прогресса посредством тренировочного сеанса на этапе S11. Например, но без ограничения, указанием на то, что приемлемый уровень прогресса был достигнут, может быть то, что новая средняя ошибка eAV+, определенная для тренировочных сеансов, проводимых на этапе S11 с приложением сил регулирования ошибок, меньше некоторого заданного процентного значения (α) средней ошибки eAV-, определенной для тренировочных сеансов без приложения сил регулирования ошибок. Заданное процентное значение (α), как правило, может быть коэффициентом масштабирования уровня прогресса в диапазоне от 0,15 до 0,45 или, опционально, в диапазоне от 0,2 до 0,4, или приблизительно 0,3.
Если на этапе S13 определено, что уровень прогресса, достигнутый пациентом в тренировочном сеансе на этапе S11, является неприемлемым, в частности, что новая средняя ошибка eAV+, определенная для тренировочных сеансов на этапе S11 с применением сил регулирования ошибок, меньше, чем заданное процентное значение средней ошибки α⋅eAV-, определенной для тренировочных сеансов без приложения сил регулирования ошибок, то на этапе S14 проверяют, превышает ли количество повторений тренировочных сеансов на этапе S11 некоторое заданное максимальное число (N, в частности, от 4 до 7) таких многократно выполняемых тренировочных сеансов. Если на этапе S14 определяют, что количество повторений тренировочных сеансов на этапе S11 превышает заданное максимальное число (N), на этапе S15 определяют некомпетентность пациента к лечению системой из-за неспособности пациента повысить результативность, т.е. неспособности достичь приемлемого уровня прогресса на протяжении заданного максимального числа (N) многократно выполняемых тренировочных сеансов S11 с постепенно уменьшающимися мешающими (и/или корректирующими) силами.
Наоборот, если на этапе S14 определяют, что количество повторений тренировочных сеансов на этапе S11 не превышает заданное максимальное число (N), то управление передается обратно на этап S11 для проведения дополнительных тренировочных сеансов с использованием максимальной прикладываемой силы fMAX, уменьшенной в масштабе на этапе S12, и для определения соответствующих новых ошибок/отклонений от ожидаемой результативности и/или соответствующей новой меры адаптационной реакции, и новой средней ошибки eAV+ для тренировочных сеансов этапа S11 с приложением сил регулирования ошибок.
Если на этапе S13 определяют, что уровень прогресса, достигнутый пациентом в тренировочном сеансе на этапе S11, является приемлемым, в частности, новая средняя ошибка eAV+, определенная для тренировочных сеансов на этапе S11 с приложением сил регулирования ошибок, меньше, чем заданное процентное значение (α) средней ошибки eAV-, определенной для тренировочных сеансов без приложения сил регулирования ошибок, то на этапе S16 параметры функции регулирования ошибок записываются (в частности, в запись 14d данных пациента) для проведения дополнительных тренировочных сеансов с приложением сил регулирования ошибок с использованием тех же параметров для запоминания пациентом прогресса, достигнутого в способе 30. Этапы S5-S16 могут быть повторены, если требуется, в любой подходящий момент времени, в частности, через несколько минут, часов, дней или недель, путем запуска способа на этапе S5 с использованием параметров регулирования ошибок, полученных для пациента в предыдущих тренировочных сеансах (s).
В возможных вариантах осуществления средняя ошибка eAV+/eAV-, определенная для пациента, тренирующегося с силами регулирования ошибок / без сил регулирования ошибок, определяется на основе измерений сил, прилагаемых задействованной в упражнении частью тела во время выполняемого сеанса упражнений. Например, силы, прикладываемые задействованной в упражнении частью тела, могут быть измерены с использованием датчиков нагрузки и/или датчиков давления, в частности, с использованием тензометрических датчиков, и/или измерений электрических токов одного или более электродвигателей (ml, m2,...), и/или непосредственно от тела проходящего лечение человека, с помощью одного или более электромиографов (ЭМГ), поверхностных ЭМГ и/или внутримышечных ЭМГ, сенсорных элементов. В таких возможных вариантах осуществления принятие решений на этапе S8 и/или S13, может быть сделано на основе сравнения средней ошибки eAV+, определенной для пациента, выполняющего упражнения, с силами регулирования ошибок, с максимальной прикладываемой силой (fMAX) или с ее частью, т.е. вместо средней ошибки eAV-, определенной для пациента, выполняющего упражнения без сил регулирования ошибок.
На фиг. 4 показана функция/профиль 40 регулирования ошибок, применимая в возможных вариантах осуществления системы 10 двигательной терапии, и средства управления человеко-машинным интерфейсом (ЧМИ), применимые для настройки ее параметров. Функция 40 регулирования ошибок может начинаться с участка 41 нечувствительности к ошибкам, определяющего диапазон малых значений ошибки (свободный диапазон, в частности, между значениями ошибки порядка 0 и 0,01), для которых система 10 не прикладывает силы к задействованной в упражнении части 15 тела. Когда ошибки, определенные на основе данных (11m) измерения, больше ошибок в диапазоне ошибок, определенном участком 41 нечувствительности к ошибкам, и меньше ошибок, определенных переходным участком 43 нечувствительности к ошибкам функции 40 регулирования ошибок, участок 42 увеличения ошибок функции 40 регулирования ошибок может быть использован для определения сил усиления (т.е. мешающих сил) ошибок, подлежащих приложению системой 10 во время тренировочного сеанса (сеансов). После переходного участка 43 нечувствительности к ошибкам, участок 44 коррекции ошибок функции 40 регулирования ошибок может использоваться для определения сил коррекции ошибок, подлежащих приложению системой 10 во время тренировочного сеанса (сеансов).
Участок 42 увеличения ошибок содержит переходный сегмент (в частности, между значениями ошибки 0,01 и 0,05), в котором силы регулирования ошибок, прикладываемые системой 10, постепенно увеличиваются в соответствии с увеличивающимися значениями ошибок. За переходным сегментом ошибок следует сегмент устойчивого приложения силы (в частности, между значениями ошибки от 0,05 до 0,15), в котором постоянная сила усиления ошибок (в частности, fMAX), прикладывается системой 10, за которым следует другой переходный сегмент (в частности, между значениями ошибки от 0,15 до 0,2), в котором силы увеличения ошибки, прикладываемые системой 10, постепенно уменьшаются в соответствии с увеличением значений ошибки.
Соответственно, приложение системой 10 сил усиления ошибок может быть начато в функции 40 регулирования ошибок с использованием функции положительного линейного изменения для переходного сегмента, определенного между участком 41 нечувствительности и определенным конечным значением ошибки диапазона линейного увеличения (в частности, 0,05). В этом диапазоне ошибок силы увеличения ошибок, прикладываемые системой, монотонно увеличиваются относительно увеличения определенных значений ошибки, и наоборот, начиная с нулевой силы (0 [кг], т.е. сила не прикладывается), и заканчивая приложением постоянной силы усиления ошибок (в частности, 1,6 [кг], fMAX) для значений ошибки, превышающих конечное значение ошибки диапазона линейного увеличения. Для значений ошибок, превышающих заданное конечное значение ошибки диапазона линейного увеличения и меньших, чем заданное конечное значение ошибки постоянного уровня (0,15), функция 40 ошибок предусматривает постоянную силу увеличения ошибок (в частности, 1,6 [кг], fMAX). Для другого переходного сегмента, определенного между значениями ошибок, превышающих заданное конечное значение ошибки постоянного уровня и меньших заданного значение ошибки линейного уменьшения (0,2), функция 40 регулирования ошибок может использовать функцию отрицательного линейного изменения для монотонного уменьшения сил увеличения ошибок от постоянной силы усиления ошибок (в частности, 1,6 [кг]) до нулевой силы усиления ошибок (0 [кг]) относительно уменьшения определенных значений ошибок, и наоборот.
После участка 42 увеличения ошибок функции 40 регулирования ошибок следует переходный участок 43 нечувствительности к ошибкам, определенный между заданным значением ошибки линейного уменьшения (в частности, 0,2) и заданным значением ошибки нейтральной зоны (в частности, 0,21), и в которой система 10 не прикладывает силы регулирования ошибок (0 [кг]).
Участок 44 коррекции ошибок функции 40 регулирования ошибок может начинаться на переходном сегменте с использованием другой функции отрицательного линейного изменения, определенной для значений ошибок, больших, чем заданное значение ошибки нейтральной зоны (в частности, 0,21), и меньших, чем заданное конечное значение ошибки отрицательного наклона, Neg. Slope (например, 0,25), в которой абсолютные значения прикладываемых сил коррекции ошибок постепенно увеличиваются относительно увеличения определенных значений ошибок, и наоборот, в направлении, противоположном силам увеличения ошибок, приложенным на участке 42 увеличения ошибок, т.е. силы коррекции ошибок, прикладываемые системой, фактически монотонно уменьшаются от нулевой силы (0 [кг]) к приложению определенной постоянной (отрицательной) силы коррекции ошибок, Neg. Force (в частности, -1,5 [кг]). В этом неограничивающем примере функция 40 регулирования ошибок создает такую же постоянную силу коррекции ошибок для значений ошибок, превышающих заданное конечное значение ошибки отрицательного наклона Neg. Slope.
Как показано в качестве примера на фиг. 4, параметры функции 40 регулирования ошибок (т.е. свободный диапазон, конечное значение ошибки линейного изменения, конечный сегмент ошибки постоянного уровня, значение ошибки линейного уменьшения, значение ошибки нейтральной зоны, значение ошибки зоны отрицательного наклона и вспомогательная отрицательная сила) могут быть заданы пользователем/практикующим врачом с использованием элементов управления текстового поля 45 ввода и/или ползунка 44, предусматриваемых ЧМИ 13h. Опционально, но в некоторых вариантах осуществления предпочтительно, один или более из этих параметров функции 40 регулирования ошибок определяются системой 13 управления на основе информации, полученной из записи 14d данных пациента, и/или средних значений ошибок (eAV- или eAV+), определяемый системой во время способа 30 лечения на фиг. 3.
На фиг. 5 для примера показаны функция 50 управления, применимая для адаптации сил функции/профиля регулирования ошибок в соответствии с прогрессом движения, и элементы управления ЧМИ, применимые для настройки ее параметров. Функция 50 управления сконфигурирована для постепенного ослабления сил регулирования ошибок функции/профиля регулирования ошибок, используемых системой 10 во время тренировочного сеанса, в соответствии с прогрессом движений, выполняемых задействованной в упражнении частью 15 тела, в частности, достижений движений тела. Использование таких функций 50 управления может потребоваться из-за возрастания усилий, которые может испытывать проходящий лечение человек при определенных движениях, которые распространяются дистально от тела проходящего лечение человека. Например, если максимальная прикладываемая сила fMAX 1,6 [кг] определена для использования с определенной функцией/профилем регулирования ошибок, для определенных упражнений, функция 50 управления может использоваться для уменьшения прикладываемой силы увеличения ошибок до 1,4 [кг] для относительного прогресса 0,33, дополнительного уменьшения прикладываемой силы увеличения ошибок до 1,3 [кг] для относительного прогресса 0,67 (что соответствует тренировке с еще большим прогрессом движения тела) и дополнительного уменьшения прикладываемой силы увеличения ошибок до 1,2 [кг] в конце движения, т.е. для относительного прогресса 1.
Система 13 управления может быть выполнена с возможностью определения любой подходящей монотонно уменьшающейся функции для функции 50 управления. Например, элементы управления ЧМИ (в частности, текстовые поля 44 и/или ползунки 45) могут использоваться для определения требуемых регулирующих сил, подлежащих применению в различных точках вдоль оси прогресса, а система 13 управления может быть выполнена с возможностью определения соответствующей функции 50 управления на основании заданных сил и точек прогресса, в частности, путем интерполяции или подбора функций. В неограничивающем примере на фиг. 5 элементы управления ЧМИ используются для определения функции 50 управления для начальной силы увеличения ошибок, определенной параметром Start Limit (в частности, 1,6 [кг], fMAX), то есть прикладываемой при нулевом (0) относительном прогрессе движения, первой промежуточной силы увеличения ошибок, Mid1 Limit (в частности, 1,4 [кг]) для относительного прогресса движения Mid1 Point (в частности, 0,33), второй промежуточной силы увеличения ошибок, Mid2 Limit (в частности, 1,4 [кг]) для относительного прогресса движения Mid2 Point (в частности, 0,33) и конечной силы увеличения ошибок (в частности, 1,2 [кг]) для конца выполняемого движения (для которого прогресс относительного движения равен 1).
Функцию управления, такую как функция 50 управления на фиг. 5, можно аналогичным образом использовать для адаптации участка 44 коррекции ошибок функции/профиля регулирования ошибок в соответствии с прогрессом движения, как проиллюстрировано для примера на фиг. 6.
На фиг. 6 графически показана схема 60 управления силами, в частности, с использованием функции 50 управления для настройки сил 61 регулирования ошибок, прикладываемых системой 10. Как видно, величины сил 61 регулирования ошибок, прикладываемых системой (10), постепенно уменьшаются с помощью функции управления по мере прогресса выполняемого движения к движениям дальше от (дистальнее от) тела пациента, в точках 62, 63,
На фиг. 7 схематично проиллюстрирована система 70 двигательной терапии согласно некоторым возможным вариантам осуществления. В этом конкретном и неограничивающем примере система 70 двигательной терапии содержит портативную и стабилизируемую тренировочную станцию 73, имеющую роботизированную руку 77, оборудованную (карданным) шарнирным манипулятором 71 на ее свободном конце. Тренировочная станция 73 может дополнительно содержать устройство 72 отображения (в частности, электроннолучевую трубку - экран ЭЛТ, жидкокристаллический дисплей - ЖК-дисплей, светодиодный (LED) дисплей или т.п.) и систему 13 управления. Шарнирный манипулятор 71 представляет собой манипулятор в целом сферической формы, имеющий внутреннюю рукоятку/устройство 71h ручного захвата, доступ к которому осуществляется через переднее отверстие 71n манипулятора 71. Во время работы проходящий лечение человек (не показан) вставляет одну руку в шарнирный манипулятор 71, захватывает устройство 71h ручного захвата и маневрирует манипулятором 71 в трехмерном пространстве, тем самым формируя траектории, предназначенные для выполнения определенных заданий и/или упражнений, предназначенных для тренировки мышц и/или центральной нервной системы, и/или для улучшения выполнения повседневных задач, в частности, человека с нарушением двигательной функции.
Устройство 72 отображения может быть частью ЧМИ 13h, но в возможных вариантах осуществления оно в основном используется системой 13 управления для отображения заданий, которые ставятся перед проходящим лечение человеком, и/или инструкций, подлежащих выполнению с использованием шарнирного манипулятора 71, и/или прогресса в выполнении заданий во время выполняемых таким образом упражнений. Например, во время тренировочного сеанса проходящему лечение человеку можно дать инструкцию использовать одну руку для манипулирования шарнирным манипулятором 71, а состояние и/или местоположение руки проходящего лечение человека в виртуальной среде могут быть представлены вместе с другими виртуальными объектами в устройстве отображения с помощью иконки/аватара/изображения «imoji» в соответствии с данными измерений, полученными от различных сенсорных устройств системы 70.
Здесь роботизированная рука 77 содержит первый и второй поворотные рычаги, а1 и а2, шарнирно соединенные друг с другом. Первый поворотный рычаг а1 может быть шарнирно прикреплен к тренировочной станции 73 для вращательного движения относительно его продольной/вертикальной оси 70х, а второй поворотный рычаг а2 может быть шарнирно прикреплен к первому поворотному рычагу а1 для вращательного движения относительно его продольной оси 70u. В некоторых вариантах осуществления поворотные рычаги а1, а2 поворачиваются с помощью шарниров, сконфигурированных для предоставления роботизированной руке 77 трех степеней свободы (СС) для манипулирования свободным концом роботизированной руки 77 в направлениях вверх-вниз, влево-вправо и вперед-назад. В некоторых вариантах осуществления шарнирный манипулятор 71 сконфигурирован так, чтобы обеспечивать возможность дополнительных СС, таких как наклон, поворот относительно вертикальной оси и поворот относительно продольной оси.
Как лучше видно на фиг. 8, первый поворотный рычаг а1 выполнен с возможностью углового движения g1 относительно продольной/вертикальной оси 70х тренировочной станции 73, тем самым обеспечивая СС вперед-назад (вдоль/параллельно оси «х») свободного конца роботизированной руки 77. Первый поворотный рычаг а1 может быть дополнительно выполнен с возможностью вращательного движения g2 вокруг продольной/вертикальной оси 70х тренировочной станции 73, тем самым обеспечивая СС влево-вправо (вдоль/параллельно оси «у») свободного конца роботизированной руки 77. Второй поворотный рычаг а2 может быть соединен с первым поворотным рычагом а1 поворотным шарниром 92j для его вращательного движения g3 относительно продольной оси 70u первого поворотного рычага а1, тем самым обеспечивая СС вверх-вниз (вдоль/параллельно ось «у») свободного конца роботизированной руки 77.
Как также видно на фиг. 8, шарнирный манипулятор 71 выполнен с возможностью обеспечения одной или более дополнительных СС свободного конца роботизированной руки 77. Например, шарнирный манипулятор 71 может быть сконфигурирован для предоставления свободному концу роботизированной руки 77 СС наклона/вращательного движения g4 (относительной оси «у») и/или СС поворота относительно вертикальной оси/вращательного движения g5 (относительно оси «z»), и/или СС поворота относительно продольной оси/вращательного движения g6 (относительно оси «х»). Таким образом, система 70 двигательной терапии может быть сконфигурирована так, чтобы обеспечивать возможность движения с шестью СС в трехмерном пространстве.
Чтобы облегчить выполнение упражнений людьми, у которых поднимающие/опускающие мышцы повреждены и/или ослаблены, в некоторых вариантах осуществления шарнирный манипулятор 71 снабжен опорным лотком 71р, выполненным с возможностью поддержки медиальной стороны ладони (т.е. мышц гипотенара) проходящего лечение человека. Поддерживающий лоток 71р имеет достаточную площадь поверхности, позволяющую проходящему лечение человеку удобно расположить ладонь на нем и легко положить пальцы на устройстве 71h ручного захвата для обеспечения надежного захвата. Поддерживающий лоток 71р предназначен для поддержки ладони и запястья проходящего лечение человека без ограничения движений лучезапястного сустава, чтобы тем самым обеспечить возможность проходящим лечение людям с поврежденными/ослабленными мышцами, отвечающими за подъем/опускание руки, поддерживать устойчивый постоянный захват устройства 71h ручного захвата, и тренировать свои поврежденные/ослабленные мышцы, отвечающие за подъем/опускание руки, без потери захвата рукой устройства 71h ручного захвата.
В этом конкретном и неограничивающем примере поддерживающий лоток 71р жестко прикреплен к устройству 71h ручного захвата с образованием узла 71s поддержки руки, механически соединенного с датчиком 71f силы/нагрузки для измерения сил, действующих/возникающих между кистью/рукой проходящего лечение человека и роботизированной рукой. Например, датчик 71f силы/нагрузки может быть жестко прикреплен одной (установочной) частью к внутреннему поворотному кольцу 71r шарнирного манипулятора 71, которое отвечает за СС поворота относительно продольной оси роботизированной руки 71, а узел 71s поддержки руки может быть жестко прикреплен к другой/чувствительной части датчика 71f силы/нагрузки. Таким образом, силы, действующие/возникающие между проходящим лечение человеком (который прикреплен/взаимодействует с поддерживающим лотком 71р и/или устройством 71h ручного захвата), и роботизированной рукой, могут быть немедленно и в тот же момент измерены. В некоторых вариантах осуществления датчик 71f силы/нагрузки представляет собой преобразователь силы/крутящего момента многоосевого типа, такой как, но не ограничиваясь этим, 6-осевой датчик силы/крутящего момента nаnо 25, производимый ATI.
В некоторых вариантах осуществления устройство 71h ручного захвата представляет собой в целом цилиндрический элемент, проходящий вертикально (до манипулирования проходящим лечение человеком) внутри шарнирного манипулятора 71. Устройство 71h ручного захвата содержит в некоторых вариантах осуществления устройство 71s определения силы захвата, выполненное с возможностью генерирования сигналов/данных, характеризующих силу захвата ладонью и пальцами проходящего лечение человека устройства 71h ручного захвата. Устройство 71s определения силы захвата может использоваться для реализации иммобилизирующего устройства для системы 70 двигательной терапии. Система 13 управления может быть соответствующим образом выполнена с возможностью проводить некоторые (или все) проводимые сеансы лечения в соответствие с полученными сигналами/данными от устройства 71s определения силы захвата, характеризующими крепкий/сильный захват ладонью и пальцами проходящего лечение человека устройства ручного захвата 71h. Система 13 управления может быть дополнительно выполнена с возможностью прерывать/останавливать проводимые сеансы лечения всякий раз, когда сигналы/данные от устройства 71s обнаружения захвата определения силы захвата указывают, что захват ладонью и пальцами проходящего лечение человека устройства 71h ручного захвата становится слишком свободным и/или слабым, в частности, для безопасности проходящего лечение субъекта, предотвращения травм и/или просто для того, чтобы проинструктировать проходящего лечение человека улучшить силу захвата устройства 71h ручного захвата.
На фиг. 9 показаны различные компоненты системы 70 двигательной терапии согласно некоторым возможным вариантам осуществления. В этом конкретном и неограничивающем примере система 77 роботизированной руки соединена с поворотной платформой 90, выполненной с возможностью поворота по оси 90а исполнительного механизма (в частности, электродвигателя и опциональных средств передачи энергии) 90m. Устройство 90s определения углового движения используется в некоторых вариантах осуществления для измерения поворотного движения g2 поворотной платформы 90 и/или оси 90а системы 77 роботизированной руки вследствие сил, прилагаемых рукой проходящего лечение человека и/или исполнительным механизмом 90m, и для генерирования соответствующих сигналов/данных i2, характеризующих это. Система 13 управления может быть выполнена с возможностью приема и обработки сигналов/данных i2, генерируемых устройством 90s определения углового движения, и генерирования ответных управляющих сигналов с2 для приведения в действие исполнительного механизма 90m, для приложения сил регулирования ошибок с целью корректировки или увеличения ошибок проходящего лечение человека во время проводимых сеансов лечения. Следует отметить, что в возможных вариантах осуществления система 77 роботизированной руки может быть непосредственно соединена с осью 90а исполнительного механизма 90m, т.е. без поворотной платформы 90.
Поворотный рычаг а1 может быть соединен с поворотной платформой 90 (или осью 90а) через шарнир 91j поворотного движения, сконфигурированный для обеспечения возможности поворотного движения g1 поворотного рычага а1 относительно продольной/вертикальной оси 70х системы 70 двигательной терапии. Исполнительный механизм (в частности, электродвигатель и опциональные средства передачи энергии) 91m используется в некоторых вариантах осуществления для поворота поворотного рычага а1 относительно продольной/вертикальной оси 70х. Устройство 91s определения углового движения может использоваться для измерения вращательного движения g1 поворотного рычага а1 системы 77 роботизированной руки вследствие сил, прилагаемых рукой проходящего лечение человека и/или исполнительным механизмом 91m, и для генерирования соответствующих сигналов/данных i1, характеризующих это. Система 13 управления может быть выполнена с возможностью приема и обработки сигналов/данных i1, генерируемых устройством 91s определения углового движения, и генерирования ответных управляющих сигналов с1 для приведения в действие исполнительного механизма 91m, для приложения сил регулирования ошибок с целью корректировки или увеличения ошибок проходящего лечение человека во время проводимых сеансов лечения.
Поворотный рычаг а2 может быть соединен с поворотным рычагом а1 через шарнир 92j поворотного движения, сконфигурированный для обеспечения возможности поворотного движения g3 поворотного рычага а2 относительно продольной оси 70и поворотного рычага а1. Исполнительный механизм (в частности, электродвигатель и опциональные средства передачи энергии) 92m используется в некоторых вариантах осуществления для поворота поворотного рычага а2 относительно продольной оси 70u поворотного рычага а1. Устройство 92s определения углового движения может использоваться для измерения вращательного движения g3 поворотного рычага а2 системы 77 роботизированной руки вследствие сил, прилагаемых рукой проходящего лечение человека и/или исполнительным механизмом 92m, и для генерирования соответствующих сигналов/данных i3, характеризующих это. Система 13 управления может быть выполнена с возможностью приема и обработки сигналов/данных i3, генерируемых устройством 92s определения углового движения, и генерирования ответных управляющих сигналов с3 для приведения в действие исполнительного механизма 92m, для приложения сил регулирования ошибок с целью корректировки или увеличения ошибок проходящего лечение человека во время проводимых сеансов лечения.
Опционально, но в некоторых вариантах осуществления предпочтительно, шарнирный манипулятор 71 жестко прикреплен к свободному концу поворотного рычага а2. Как показано для примера на фиг. 9, датчик 71f силы/нагрузки используется в некоторых вариантах осуществления для соединения/прикрепления устройства 71h ручного захвата и опорного лотка 71р, т.е. узла 71s поддержки руки, к шарнирному манипулятору 71, в частности, датчик 71f силы/нагрузки жестко прикреплен к внутреннему поворотному кольцу 71r шарнирного манипулятора 71 с помощью его фиксирующей/стабилизирующей части и прикреплен к узлу 71s поддержки руки с помощью его чувствительной части преобразователя.
Датчик 71f силы/нагрузки может быть многоосевым сенсорным устройством, выполненным с возможностью измерения сил, действующих/возникающих между задействованной в упражнении частью тела (например, рукой и/или кистью) проходящего лечение человека и роботизированной рукой и/или узлом 71s поддержки руки (в частности, опорным лотком 71f и/или устройством 71h ручного захвата) во всех направлениях, связанных с наклоном g4, и/или поворотом g5 относительно вертикальной оси, и/или поворотом g6 относительно продольной оси и генерирования сигналов/данных i4, характеризующих это. Система 13 управления может быть выполнена с возможностью приема и обработки сигналов/данных i3, генерируемых датчиком 71f силы/нагрузки, и генерирования ответных управляющих сигналов с1, и/или с2, и/или с3 для приведения соответствующим образом в действие исполнительных механизмов 90m, и/или 91m, и/или 92m, для приложения сил регулирования ошибок с целью корректировки или увеличения ошибок проходящего лечение человека во время проводимых сеансов лечения.
Как также видно на фиг. 9, в некоторых вариантах осуществления система 13 управления сконфигурирована для реализации иммобилизирующего модуля 13w для выборочной блокировки и разблокировки работы системы 70 в соответствии с сигналами/данными i5, генерируемыми устройством 71s определения силы захвата. Например, но без ограничения, иммобилизирующий модуль 13w может быть выполнен с возможностью блокировки работы модуля 23 управления приводами всякий раз, когда сигналы/данные от устройства 71s определения силы захвата указывают на свободный/слабый захват ладонью и пальцами проходящего лечение субъекта внутренней рукоятки/устройства 71h ручного захвата шарнирного манипулятора 71.
Опционально, и в некоторых вариантах осуществления предпочтительно, система 13 управления содержит модуль 13z нулевой гравитации, выполненный с возможностью управления работой модуля 23 управления драйверами для непрерывного генерирования управляющих сигналов с1, и/или с2, и/или с3, для поддержания свободного конца системы роботизированной руки на одной и той же высоте, в частности, в соответствии с сигналами/данными i1, и/или i2, и/или i3, генерируемыми датчиками 90s, и/или 91s, и/или 92s, соответственно. В режиме нулевой гравитации свободный конец системы 77 роботизированной руки, взаимодействующий с ладонью и пальцами проходящего лечение человека, постоянно поддерживается в плавающем состоянии вследствие сил противодействия гравитации, прикладываемых различными исполнительными механизмами системы, т.е. исполнительные механизмы непрерывно прилагают подъемные силы, сконфигурированные для компенсации веса руки и кисти проходящего лечение человека. Блок 13h ЧМИ может быть соответствующим образом адаптирован, чтобы позволить оператору системы 70 выборочно включать или выключать модуль 13z нулевой гравитации, в частности, чтобы облегчить использование системы 70 людьми, имеющими поврежденные/ослабленные мышцы, отвечающие за подъем/опускание.
Следует понимать, что на протяжении всего описания, где показан или раскрыт процесс или способ, этапы способа могут выполняться в любом порядке или одновременно, если только из контекста явно не следует, что один этап зависит от того другого этапа, выполняемого первым.
Как раскрыто выше и показано на соответствующих фигурах, настоящее изобретение обеспечивает методы регулирования ошибок, применимые для терапии нарушений двигательной функции, и связанные с ними способы. Хотя были описаны конкретные варианты осуществления изобретения, следует понимать, однако, что изобретение не ограничивается ими, поскольку специалисты в данной области техники могут вносить модификации, в частности, в свете вышеизложенных идей. Как будет понятно специалисту, изобретение может быть реализовано множеством способов с использованием более чем одного метода из раскрытых выше, без отклонения от объема формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБОРУДОВАНИЕ ДЛЯ РЕАБИЛИТАЦИИ ДВИЖЕНИЯ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ | 2017 |
|
RU2756370C2 |
| СПОСОБ ИМПУЛЬСНОЙ КИНЕТИКОТЕРАПИИ ОБЕЗДВИЖЕННЫХ БОЛЬНЫХ | 2011 |
|
RU2456973C1 |
| СПОСОБ УЛУЧШЕНИЯ РАБОТОСПОСОБНОСТИ ЧЕЛОВЕКА | 2014 |
|
RU2601102C2 |
| Способ роботизированной механотерапии после реверсивного эндопротезирования плечевого сустава | 2023 |
|
RU2802552C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Способ тренировки и количественной оценки моторики пальцев рук и функционального состояния головного мозга по управлению координированным движением пальцев рук и устройство для его реализации | 2021 |
|
RU2786989C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| Способ лечения пациентов с остеопорозом, осложненным переломом дистального отдела предплечья | 2020 |
|
RU2734285C1 |
| Способ реабилитации пациентов после операции эндопротезирования тазобедренного сустава по поводу коксартроза | 2023 |
|
RU2806494C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПОСЛЕ ОПЕРАЦИИ ПО ПРОТЕЗИРОВАНИЮ КОЛЕННОГО СУСТАВА | 2024 |
|
RU2825515C1 |
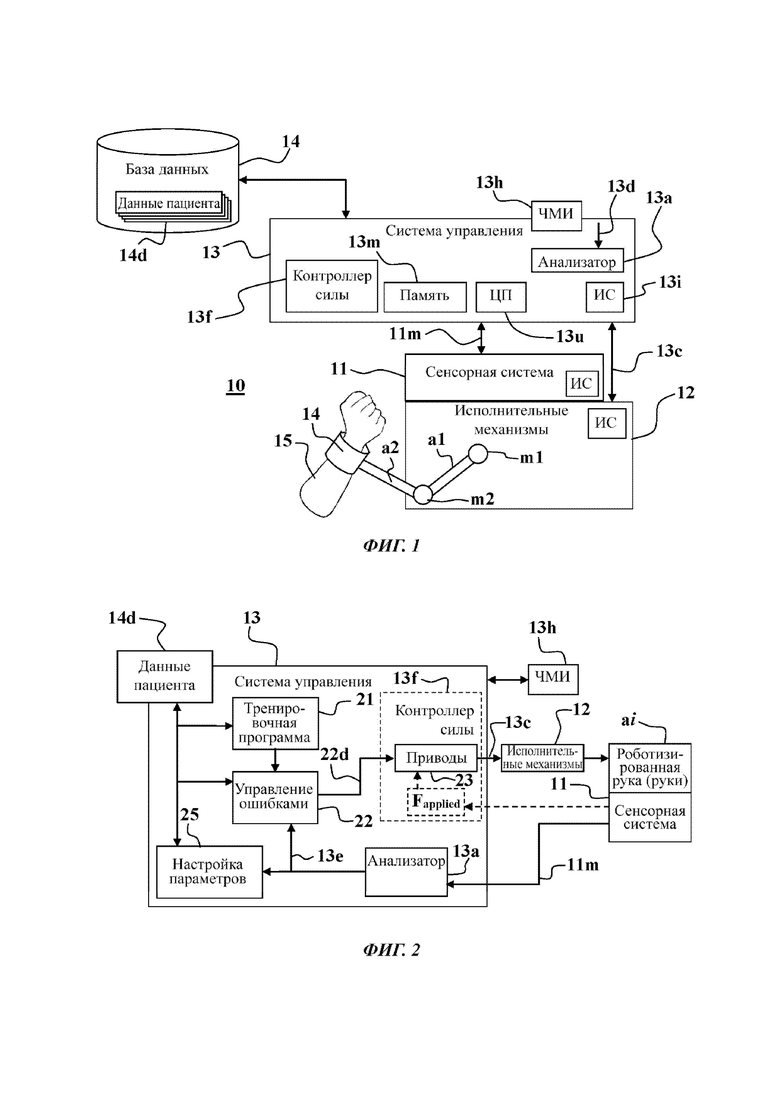
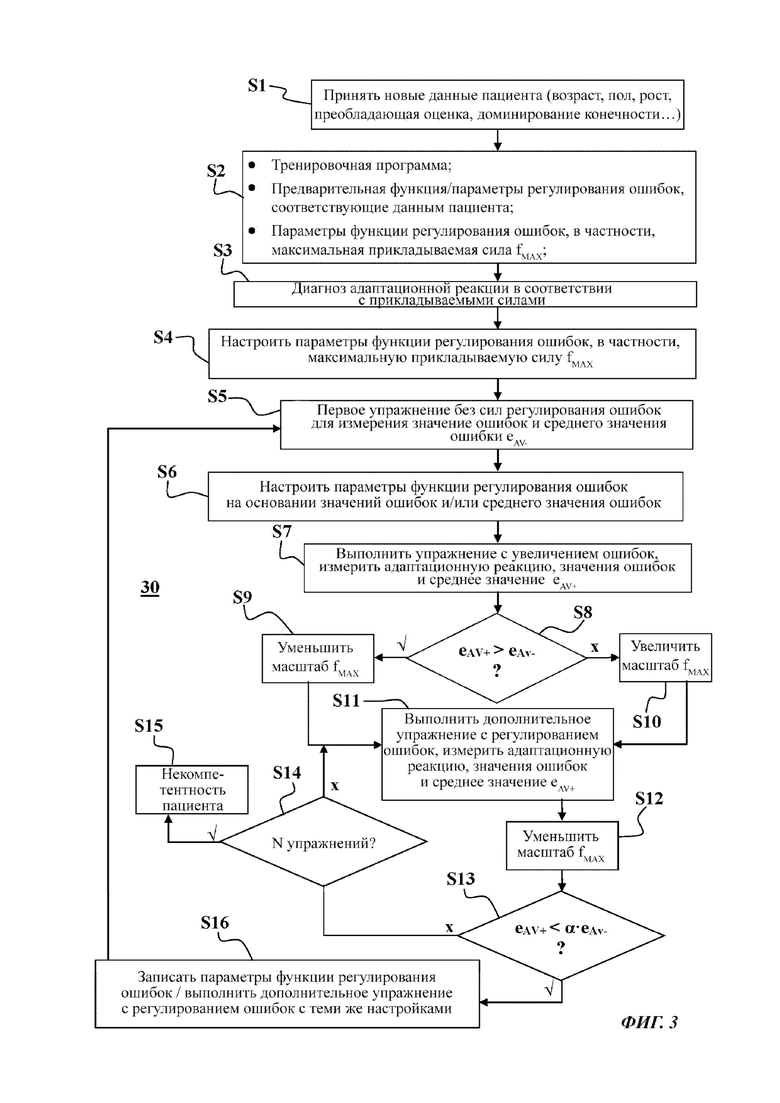
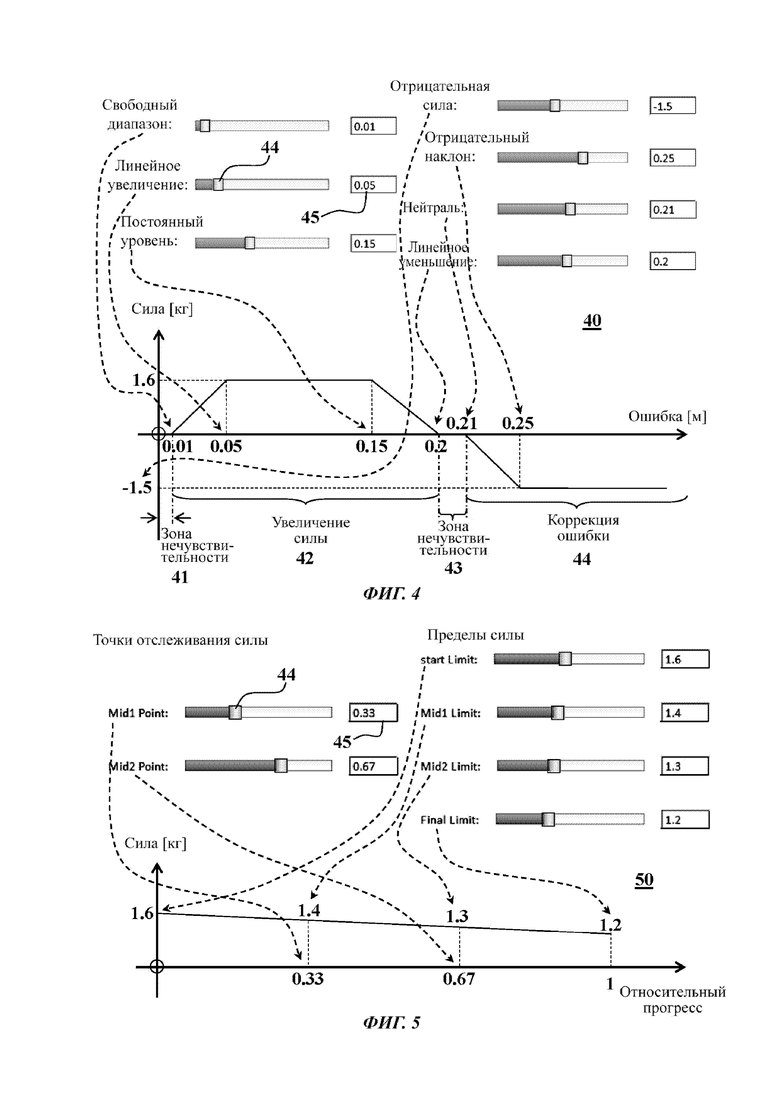
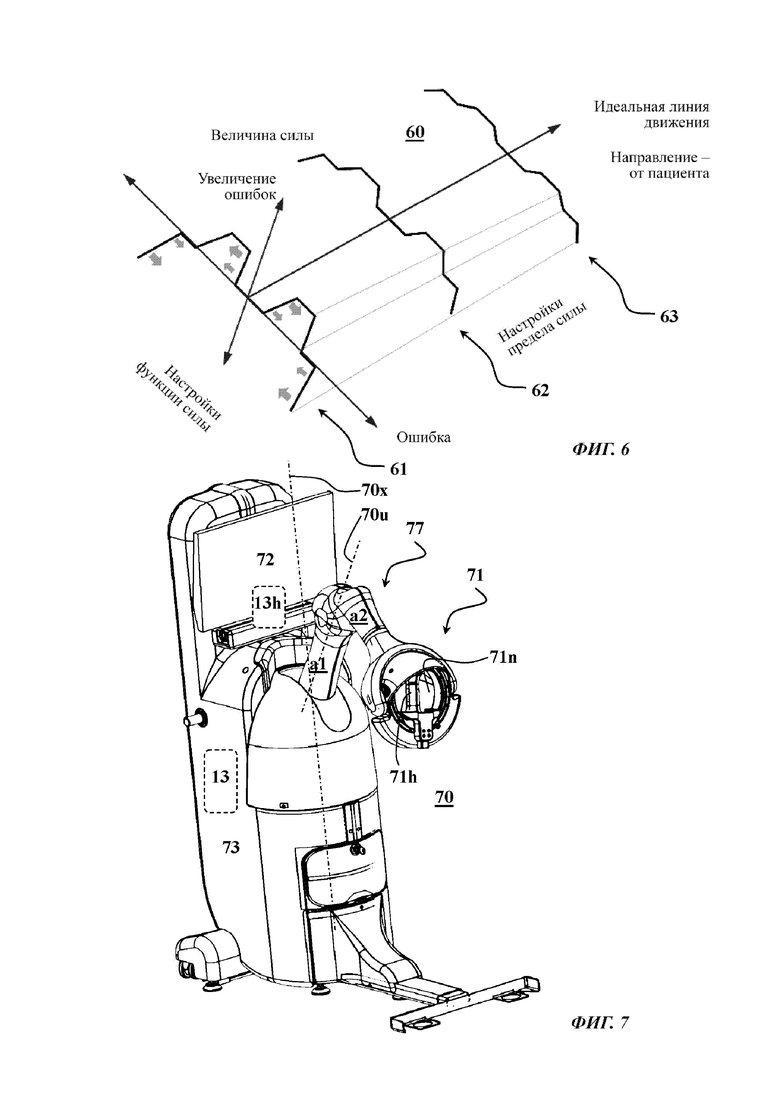
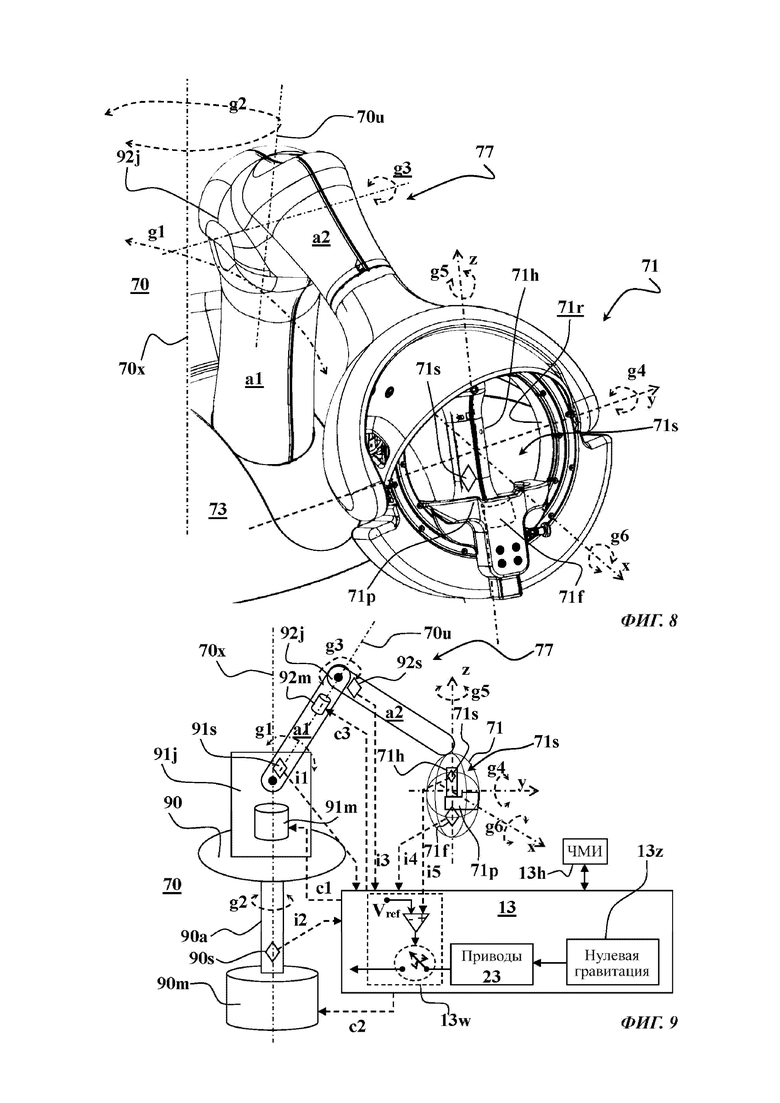
Группа изобретений относится к системам и способам для улучшения двигательной способности человека, а также к определению компетентности человека к лечению двигательной функции. Система содержит устройство управляемого приложения силы к части тела во время выполняемого человеком упражнения и сенсорную систему для отслеживания тренировочных сеансов упражнения. Сенсорная система генерирует первые измерительные данные, относящиеся к ошибкам, и вторые измерительные данные, характеризующие адаптационную реакцию человека на приложенную силу. Контроллер силы управляет работой устройства приложения силы в соответствии с рабочими данными так, что прикладываемая сила включает в себя мешающую составляющую силы, для которой предусмотрено приложение сил увеличения ошибок, определенных в соответствии с заданным диапазоном профиля регулирования ошибок. При этом определяют данные о настройке силы на основании относящихся к человеку данных. Данные о настройке силы характеризуют максимальное значение прикладываемой силы для ограничения сил увеличения ошибок заданного профиля регулирования ошибок, связанного с выполняемым упражнением. Анализируют первые и вторые измерительные данные для настройки диапазона профиля регулирования ошибок и его максимального параметра прикладываемой силы. Генерируют рабочие данные для влияния сил увеличения ошибок в пределах диапазона профиля регулирования ошибок до тех пор, пока не будет идентифицировано заданное условие вторых измерительных данных, характеризующих адаптационную реакцию человека на приложенные силы увеличения ошибок. При определении компетентности человека к лечению двигательной функции измеряют относящиеся к ошибкам данные применительно к выполнению человеком упражнения без приложения сил регулирования ошибок и с приложением сил регулирования ошибок. Определяют средние значения ошибки для выполнения упражнения без приложения сил регулирования ошибок и с приложением сил регулирования ошибок. Определяют компетентность на основании отношения между средними значениями ошибок, определяемыми для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок. Достигается адаптивное построение протокола регулирования ошибок для конкретного пациента для согласования протокола с конкретными характеристиками и способностями пациента с использованием системы двигательной терапии. 4 н. и 47 з.п. ф-лы, 9 ил.
1. Система для использования при улучшении двигательной способности человека, содержащая:
устройство приложения силы, выполненное с возможностью управляемого приложения силы по меньшей мере к части тела человека во время выполняемого человеком упражнения;
сенсорную систему, выполненную с возможностью отслеживания одного или более тренировочных сеансов упражнения, выполняемого указанной по меньшей мере частью тела человека, и выборочного генерирования первых измерительных данных, содержащих относящиеся к ошибкам данные, и вторых измерительных данных, характеризующих адаптационную реакцию человека на силу, приложенную к указанной по меньшей мере части тела человека; и
систему управления, выполненную с возможностью обмена данными с сенсорной системой и с устройством приложения силы и содержащую:
контроллер силы, выполненный с возможностью управления работой устройства приложения силы в соответствии с рабочими данными, так что сила, прикладываемая к части тела, включает в себя по меньшей мере одну мешающую составляющую силы, для которой предусмотрено приложение сил увеличения ошибок устройством приложения силы, определенных в соответствии с заданным диапазоном профиля регулирования ошибок;
анализатор, выполненный с возможностью выборочного выполнения следующего: (i) предоставления данных о настройке силы, характеризующих максимальное значение прикладываемой силы для ограничения сил увеличения ошибок указанного профиля регулирования ошибок, по меньшей мере частично на основании относящихся к человеку данных применительно к указанному упражнению; (ii) анализа по меньшей мере одного из первых и вторых измерительных данных для определения данных, характеризующих настройку диапазона профиля регулирования ошибок и его максимального значения прикладываемой силы, и генерирования рабочих данных, содержащих указанные мешающие составляющие силы, в контроллер силы, до тех пор, пока не будет идентифицировано заданное условие вторых измерительных данных, характеризующих адаптационную реакцию человека на приложенные силы увеличения ошибок.
2. Система по п. 1, в которой анализатор выполнен с возможностью доступа к заранее сохраненным данным, содержащим данные о настройке силы, характеризующие максимальное значение прикладываемой силы для указанного профиля регулирования ошибок, на основании относящихся к человеку данных применительно к упражнению.
3. Система по п. 1, в которой анализатор выполнен с возможностью анализа входных данных, содержащих относящиеся к человеку данные применительно к упражнению, и определения данных о настройке силы, характеризующих максимальное значение прикладываемой силы для указанного профиля регулирования ошибок.
4. Система по п. 1, в которой сенсорная система содержит по меньшей мере одно устройство обнаружения движения, выполненное с возможностью определения модели движения, характеризующей выполнение человеком тренировочного сеанса, и, при идентификации ошибки в указанной модели движения, измерения указанной ошибки и генерирования первых измерительных данных, содержащих относящиеся к ошибкам данные.
5. Система по п. 4, в которой по меньшей мере одно устройство обнаружения движения выполнено с возможностью определения модели движения, характеризующей выполнение человеком тренировочного сеанса, путем отслеживания по меньшей мере одного из следующего: движения, выполняемого указанной по меньшей мере частью тела человека, и одного или более параметров или режимов рабочего устройства, используемого человеком во время тренировочного сеанса.
6. Система по п. 1, в которой сенсорная система содержит один или более датчиков, выполненных с возможностью определения ответной силы указанной части тела на указанную силу, прикладываемую к ней, и генерирования вторых измерительных данных, характеризующих адаптационную реакцию человека.
7. Система по п. 6, в которой указанные один или более датчиков выполнены с возможностью непосредственного измерения ответной силы указанной части тела на силу, прикладываемую к ней, и/или измерения ответной силы через ее влияние на один или более параметров или режимов рабочих устройств, используемых человеком во время тренировочного сеанса.
8. Система по п. 1, в которой профиль регулирования ошибок содержит по меньшей мере один участок увеличения ошибок, определяющий диапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого предусмотрено приложение указанных сил увеличения ошибок устройством приложения силы.
9. Система по п. 8, в которой по меньшей мере один участок увеличения ошибок содержит по меньшей мере один постоянный диапазон увеличения ошибок, определяющий поддиапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого силы увеличения ошибок, прикладываемые устройством приложения силы, постоянны.
10. Система по п. 1, в которой профиль регулирования ошибок содержит по меньшей мере один участок коррекции ошибок, определяющий диапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого предусмотрено приложение сил коррекции ошибок устройством приложения силы.
11. Система по п. 10, в которой по меньшей мере один участок коррекции ошибок содержит по меньшей мере один постоянный диапазон коррекции ошибок, определяющий поддиапазон значений ошибок, связанных с упражнением, выполняемым по меньшей мере частью тела человека, для которого силы коррекции ошибок, прикладываемые устройством приложения силы, постоянны.
12. Система по п. 8, в которой профиль регулирования ошибок содержит по меньшей мере один участок нечувствительности, определяющий диапазон значений ошибок, для которого не предусмотрено приложение сил устройством приложения силы.
13. Система по п. 12, в которой профиль регулирования ошибок содержит по меньшей мере один переходный участок, определяющий диапазон значений ошибок между указанным по меньшей мере одним участком нечувствительности и указанным по меньшей мере одним участком увеличения ошибок профиля регулирования ошибок, для которого предусмотрено постепенное изменение сил, прикладываемых устройством приложения силы, в соответствии с переходом между указанными участком нечувствительности и участком увеличения ошибок.
14. Система по п. 12, в которой профиль регулирования ошибок содержит по меньшей мере один переходный участок, определяющий диапазон значений ошибок между указанным по меньшей мере одним участком нечувствительности и указанным по меньшей мере одним участком коррекции ошибок профиля регулирования ошибок, для которого предусмотрено постепенное изменение сил, прикладываемых устройством приложения силы, в соответствии с переходом между указанными участком нечувствительности и участком коррекции ошибок.
15. Система по п. 1, в которой профиль регулирования ошибок содержит по меньшей мере одну функцию управления, определяющую профиль ослабления для профиля регулирования ошибок, в соответствии с прогрессом движения, выполняемого по меньшей мере частью тела человека.
16. Система по п. 8, в которой предусмотрена возможность определения анализатором по меньшей мере одного из указанного по меньшей мере одного участка увеличения ошибок, указанного по меньшей мере одного постоянного участка увеличения ошибок, указанного по меньшей мере одного участка коррекции ошибок, указанного по меньшей мере одного постоянного участка коррекции ошибок, указанного по меньшей мере одного участка нечувствительности, указанного по меньшей мере одного переходного участка и/или указанной по меньшей мере одной функции управления, - на основании измерительных данных, и/или относящихся к человеку данных, и/или на основании входных данных пользователя.
17. Система по п. 1, содержащая базу данных для хранения относящихся к человеку данных, и/или данных о настройке силы, и/или профиля регулирования ошибок.
18. Система по любому из предшествующих пунктов, в которой устройство приложения силы содержит: систему роботизированной руки, выполненную с возможностью обеспечения движения руки проходящего лечение человека по меньшей мере в одном из следующих направлений: вверх-вниз, влево-вправо и вперед-назад; несущий поддон, соединенный со свободным концом указанной системы роботизированной руки и выполненный с возможностью поддержания ладони и запястья руки проходящего лечение человека; и устройство ручного захвата, соединенное с указанным несущим поддоном и выполненное с возможностью осуществления захвата указанной ладонью и пальцами руки проходящего лечение человека, для содействия выполнению упражнения людям с нарушением двигательной функции.
19. Система по п. 18, содержащая датчик силы, выполненный с возможностью измерения сил, действующих между частью тела проходящего лечение человека и роботизированной рукой, причем указанный датчик силы соединяет указанное устройство ручного захвата и/или несущий поддон со свободным концом системы роботизированной руки.
20. Система по п. 18, содержащая устройство определения силы захвата в устройстве ручного захвата, выполненное с возможностью измерения силы захвата ладонями и пальцами проходящего лечение человека указанного устройства ручного захвата и генерирования данных/сигналов, характеризующих ее.
21. Система по п. 19, в которой система управления содержит иммобилизирующий модуль, выполненный с возможностью остановки работы указанной системы в соответствии с сигналами/данными от устройства определения силы захвата.
22. Система по п. 18, содержащая шарнирный манипулятор, прикрепленный к свободному концу системы роботизированной руки и выполненный с возможностью обеспечения совершения устройством ручного захвата по меньшей мере одного из следующих движений: наклона, поворота относительно вертикальной плоскости и поворота относительно продольной оси.
23. Система по п. 18, в которой система управления содержит модуль нулевой гравитации, выполненный с возможностью управления устройством приложения силы для приложения сил противодействия гравитации к свободному концу системы роботизированной руки.
24. Способ для использования при восстановлении двигательной способности человека, включающий в себя:
определение данных о настройке силы на основании относящихся к человеку данных, причем указанные данные о настройке силы характеризуют максимальное значение прикладываемой силы, прикладываемой по меньшей мере к части тела человека для ограничения сил увеличения ошибок заданного профиля регулирования ошибок, связанного с упражнением, выполняемым человеком;
генерирование первых измерительных данных, содержащих относящиеся к ошибкам данные, применительно к выполнению человеком указанного упражнения, и вторых измерительных данных, характеризующих адаптационную реакцию человека на силу, приложенную к указанной по меньшей мере части тела человека во время указанного упражнения; и
анализ по меньшей мере одного из первых и вторых измерительных данных для определения данных, характеризующих настройку диапазона профиля регулирования ошибок и его максимального параметра прикладываемой силы, и генерирование рабочих данных для влияния указанных сил увеличения ошибок посредством устройства приложения силы для приложения силы в пределах указанного диапазона профиля регулирования ошибок, до тех пор, пока не будет идентифицировано заданное условие вторых измерительных данных, характеризующих адаптационную реакцию человека на приложенные силы увеличения ошибок.
25. Способ по п. 24, в котором относящиеся к человеку данные содержат по меньшей мере одно из физического состояния, типа повреждения, возраста, веса, роста, пола, двигательных возможностей, адаптационной реакции.
26. Способ по п. 24, включающий в себя обработку указанных измерительных данных, содержащих указанные относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого с приложением указанных сил увеличения ошибок, и, на основании этого, настройку по меньшей мере максимального значения прикладываемой силы профиля регулирования ошибок.
27. Способ по п. 24, включающий в себя обработку указанных измерительных данных, содержащих указанные относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого без приложения указанных сил увеличения ошибок, и, на основании этого, определение или настройку по меньшей мере одного параметра профиля регулирования ошибок.
28. Способ по п. 27, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного участка увеличения ошибок профиля регулирования ошибок, в котором предусмотрено приложение сил увеличения ошибок по меньшей мере к части тела человека.
29. Способ по п. 28, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного постоянного диапазона увеличения ошибок, определяющего поддиапазон значений ошибок в пределах участка увеличения ошибок, в котором предусмотрено приложение постоянной силы увеличения ошибок по меньшей мере к части тела человека.
30. Способ по п. 27, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного участка коррекции ошибок профиля регулирования ошибок, в котором предусмотрено приложение сил коррекции ошибок по меньшей мере к части тела человека.
31. Способ по п. 30, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного постоянного диапазона коррекции ошибок, определяющего поддиапазон значений ошибок в пределах участка коррекции ошибок, в котором предусмотрено приложение постоянной силы увеличения ошибок по меньшей мере к части тела человека.
32. Способ по п. 28, в котором приложение сил увеличения и коррекции ошибок предусмотрено в противоположных направлениях.
33. Способ по п. 28, включающий в себя определение постоянных сил увеличения или коррекции ошибок на основании определенного максимального значения прикладываемой силы.
34. Способ по п. 27, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного участка нечувствительности профиля регулирования ошибок, в котором не прикладывают силы по меньшей мере к части тела человека.
35. Способ по п. 34, в котором по меньшей мере один участок нечувствительности профиля регулирования ошибок определяют для пренебрежимо малых значений относящихся к ошибкам данных.
36. Способ по п. 34, в котором определяют по меньшей мере один участок нечувствительности между указанным участком увеличения ошибок и участком коррекции ошибок функции регулирования ошибок.
37. Способ по п. 36, включающий в себя определение или настройку, на основании обработанных измерительных данных, по меньшей мере одного переходного участка профиля регулирования ошибок, в котором силы, прикладываемые по меньшей мере к части тела человека, постепенно изменяются в соответствии с изменениями значений ошибок относящихся к ошибкам данных.
38. Способ по п. 37, в котором по меньшей мере один переходный участок профиля регулирования ошибок определен между одним из участков нечувствительности и одним из участков увеличения или коррекции ошибок профиля регулирования ошибок.
39. Способ по п. 27, включающий в себя определение, на основании относящихся к ошибкам данных, среднего значения ошибки для выполнения упражнения без приложения сил регулирования ошибок.
40. Способ по п. 39, включающий в себя обработку указанных измерительных данных, содержащих указанные относящиеся к ошибкам данные, применительно к выполнению человеком упражнения, выполняемого с указанными силами регулирования ошибок, прикладываемыми в соответствии с профилем регулирования ошибок, и на основании этого определение по меньшей мере одного из адаптационной реакции человека и среднего значения ошибки для выполнения упражнения с приложением указанных сил регулирования ошибок.
41. Способ по п. 40, включающий в себя настройку определенного максимального значения прикладываемой силы на основании сравнения между определенным средним значением ошибки для выполнения упражнения с приложением и без приложения сил регулирования ошибок.
42. Способ по п. 41, включающий в себя обработку указанных измерительных данных, содержащих указанные относящиеся к ошибкам данные, применительно к выполнению человеком дополнительного упражнения, выполняемого с силами регулирования ошибок, прикладываемыми в соответствии с профилем регулирования ошибок, и на основании этого определение по меньшей мере одного из адаптационной реакции человека и среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок.
43. Способ по п. 42, включающий в себя повторение обработки измерительных данных, содержащих относящиеся к ошибкам данные применительно к выполнению человеком дополнительного упражнения, выполняемого с силами регулирования ошибок, прикладываемыми в соответствии с профилем регулирования ошибок, до тех пор, пока не произойдет одно из следующего: (i) определенная адаптационная реакция и/или среднее значение ошибки для выполнения упражнения с приложением сил регулирования ошибок станет указывать на приемлемый уровень прогресса в выполнении упражнения; или (ii) количество раз выполнения упражнения с приложением сил регулирования ошибок станет равно заданному числу.
44. Способ по п. 24, включающий в себя определение функции управления, сконфигурированной для постепенного ослабления сил регулирования ошибок, прикладываемых по меньшей мере к части тела человека во время упражнения, относительно расстояния от тела указанного человека.
45. Способ определения компетентности человека к лечению двигательной функции, включающий в себя:
предоставление профиля регулирования ошибок, определяющего по меньшей мере одну мешающую составляющую силы, в которой предусмотрено приложение сил увеличения ошибок по меньшей мере к части тела указанного человека во время выполнения упражнения, и максимального значения прикладываемой силы, ограничивающего силы увеличения ошибок указанного профиля регулирования ошибок;
измерение относящихся к ошибкам данных применительно к выполнению человеком упражнения без приложения сил регулирования ошибок, определяемых указанным профилем регулирования ошибок, и на основании этого определение среднего значения ошибки для выполнения упражнения без приложения сил регулирования ошибок;
измерение относящихся к ошибкам данных применительно к выполнению человеком упражнения с приложением сил регулирования ошибок, определяемых указанным профилем регулирования ошибок, и на основании этого определение среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок; и
определение указанной компетентности на основании отношения между средними значениями ошибок, определяемыми для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок.
46. Способ по п. 45, включающий в себя использование отношения между средними значениями ошибок, определяемыми для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок, для определения уровня прогресса человека в выполнении упражнения, и причем компетентность указанного человека к лечению определяют всякий раз, когда указанный уровень прогресса выше заданного приемлемого значения уровня прогресса.
47. Способ по п. 46, включающий в себя измерение множества относящихся к ошибкам данных применительно к соответствующему множеству выполнений человеком упражнения с приложением сил регулирования ошибок, определение соответствующего среднего значения ошибки для каждого из множества выполнений упражнения с приложением сил регулирования ошибок на основании их соответствующих измеренных относящихся к ошибкам данных, определение соответствующего уровня прогресса для каждого из множества выполнений упражнения на основании соответствующего среднего значения ошибки с приложением сил регулирования ошибок и среднего значения ошибки, определенного для выполнения упражнения без сил регулирования ошибок, и определение компетентности указанного человека к лечению, если по меньшей мере один из указанного множества уровней прогресса выше заданного приемлемого значения уровня прогресса.
48. Способ по любому из пп. 45-57, в котором относящиеся к ошибкам данные связаны по меньшей мере с одним из следующего: отклонение (отклонения) по меньшей мере одной части тела от требуемой траектории; и/или отклонение (отклонения) сил, прикладываемых по меньшей мере одной частью тела от требуемого профиля приложения сил.
49. Система определения компетентности человека к лечению двигательной функции, содержащая:
устройство приложения силы, выполненное с возможностью управляемого приложения силы по меньшей мере к части тела человека во время выполняемого человеком упражнения;
сенсорную систему, выполненную с возможностью отслеживания одного или более тренировочных сеансов упражнения, выполняемого указанной по меньшей мере частью тела человека, и генерирования измерительных данных;
и систему управления, выполненную с возможностью обмена данными с сенсорной системой и с устройством приложения силы и содержащую:
контроллер силы, выполненный с возможностью управления работой устройства приложения силы в соответствии с рабочими данными, так что сила, прикладываемая к части тела, включает в себя по меньшей мере одну мешающую составляющую силы, для которой предусмотрено приложение сил увеличения ошибок устройством приложения силы, определенных в соответствии с заданным диапазоном профиля регулирования ошибок;
анализатор, выполненный с возможностью выполнения следующего: определения, на основе измерительных данных, относящихся к ошибкам данных, связанных с выполнением человеком упражнения без приложения сил регулирования ошибок, определяемых указанным профилем регулирования ошибок; определения, на основе измерительных данных, среднего значения ошибки для выполнения упражнения с приложением сил регулирования ошибок, определяемых указанным профилем регулирования ошибок; и определения указанной компетентности на основании отношения между средними значениями ошибок, определенными для выполнения упражнения с силами регулирования ошибок и без сил регулирования ошибок.
50. Система по п. 49, в которой относящиеся к ошибкам данные связаны с отклонением по меньшей мере части тела человека от требуемой траектории во время упражнения, выполняемого человеком, и/или отклонением силы, прикладываемой по меньшей мере частью тела человека во время упражнения, от требуемой модели силы.
51. Система по п. 49 или 50, в которой сенсорная система выполнена с возможностью генерирования измерительных данных с использованием по меньшей мере одного из следующего: датчика положения, акселерометра, измерителя скорости, съемочной камеры, датчика нагрузки, датчика давления, тензометрического датчика, амперметра, выполненного с возможностью измерения электрического тока двигателя в устройстве приложения силы, электромиографа (EMG), поверхностного электромиографа, и/или внутримышечного электромиографа.
| US 2019021929 A1, 24.01.2019 | |||
| US 2017326018 A1, 16.11.2017 | |||
| US 2016166454 A1, 26.06.2016 | |||
| EP 3132784 A1, 22.02.2017 | |||
| JP 2019092928 A, 20.06.2019 | |||
| CN 109475460 А, 15.03.2019 | |||
| МАШИНА ДЛЯ КОНТАКТНОЙ РОЛИКОВОЙ СВАРКИ | 0 |
|
SU198472A1 |

