Изобретение относится к гибридному несущему винту для летательного аппарата, летательному аппарату с гибридным несущим винтом, применению гибридного несущего винта в летательном аппарате и способу полета летательного аппарата.
Гибридный несущий винт представляет собой комбинацию из двух различных типов несущих винтов или же систем несущих винтов. Гибридные несущие винты в летательных аппаратах, например самолетах, применяются таким образом, что обоим типам несущего винта или же системам несущего винта предназначены различные задачи. Например, из DE 102007009951 В3 известен летательный аппарат, в котором вращающийся цилиндр обеспечивает подъемную силу, в то время как циклоидальный пропеллер отвечает за управляемость и тягу. Вращающийся цилиндр также известен как ротор Флеттнера, в нем вращающийся цилиндр подвергается действию набегающего потока, в результате чего создается сила, которая направлена поперек направления набегающего потока. Эта созданная сила основана на эффекте Магнуса и поэтому называется силой Магнуса. Однако оказалось, что управление пропеллерными элементами циклоидального пропеллера является технически трудоемким.
Поэтому существует потребность в том, чтобы предоставить в распоряжение гибридный несущий винт, который имеет простую конструкцию и благодаря этому является легким и экономичным в изготовлении.
Это достигнуто посредством гибридного несущего винта, летательного аппарата, применением гибридного несущего винта в летательном аппарате, а также способом по одному из независимых пунктов формулы изобретения. Примерные конструктивные формы представлены в зависимых пунктах формулы изобретения.
В соответствии с примерной формой осуществления изобретения предусмотрен гибридный несущий винт для летательного аппарата, который имеет использующий эффект Магнуса несущий винт, несущий винт с поперечным направлением потока и направляющее устройство. Использующий эффект Магнуса несущий винт посредством первого приводного устройства выполнен с возможностью вращательного приведения в движение вокруг оси использующего эффект Магнуса несущего винта и имеет замкнутую боковую поверхность. Несущий винт с поперечным направлением потока закреплен с возможностью вращения вокруг оси вращения и имеет множество проходящих аксиально лопастей несущего винта, которые выполнены с возможностью вращательного приведения в движение вокруг оси вращения посредством второго приводного устройства и которые выполнены неподвижными относительно тангенциального углового положения. Использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, а ось использующего эффект Магнуса несущего винта проходит в направлении оси вращения. Направляющее устройство имеет корпусной сегмент, который частично окружает несущий винт с поперечным направлением потока в направлении контура, при этом корпусной сегмент имеет механизм изменения положения и выполнен с возможностью поворота, по меньшей мере, относительно оси использующего эффект Магнуса несущего винта. Корпусной сегмент выполнен с возможностью ориентации таким образом, что несущий винт с поперечным направлением потока создает силу тяги и вызывает поперечный набегающий поток на использующем эффект Магнуса несущем винте таким образом, что создается сила согласно эффекту Магнуса, которая действует в качестве подъемной силы.
Таким образом является возможным обе необходимые для летательного аппарата силы, то есть силу тяги и подъемную силу создавать с помощью гибридного несущего винта. При этом несущий винт с поперечным направлением потока благодаря своим неподвижным лопастям, которые во время вращения несущего винта с поперечным направлением потока не изменяют свое тангенциальное угловое положение, то есть которые движутся в постоянно одинаковой ориентации относительно центра вращения несущего винта вокруг него по круговой траектории, сконструирован максимально просто, то есть несущий винт с поперечным направлением потока просто конструируется и способствует минимизации веса несущего винта. В комбинации с направляющим устройством несущий винт с поперечным направлением потока, наряду с функцией создания силы тяги, получает еще и вторую функцию, а именно вызывать поперечный набегающий поток на использующем эффект Магнуса несущем винте для того, чтобы, так сказать, в качестве создателя силы тяги с вращающимся использующим эффект Магнуса несущим винтом предоставлять в распоряжение как можно большую подъемную силу. Таким образом, благодаря возможности ориентации корпусного сегмента направляющего устройства в распоряжение предоставляется гибридный несущий винт, который создает регулируемые подъемные силы и силы тяги и поэтому подходит для летательного аппарата.
В противоположность известным из уровня техники способным к вертикальному взлету самолетам, например так называемым поворотным конфигурациям несущих винтов, как, например, V-22 Osprey, летательный аппарат согласно изобретению предлагает более простое механическое решение и большую безопасность полета, прежде всего, в переходной фазе между крейсерским полетом и взлетом или посадкой.
Согласно изобретению использующий эффект Магнуса несущий винт является вращательно-симметричным полым телом, которое за счет эффекта Магнуса вызывает отклонение воздушного потока.
В соответствии с изобретением несущий винт с поперечным направлением потока вызывает циркуляционный поток. Это вращательный воздушный поток, на который одновременно накладывается поступательный воздушный поток, который также вызывается несущим винтом с поперечным направлением потока или же движением летательного аппарата в воздухе в процессе полета.
Вращательный воздушный поток и поступательный воздушный поток образуют комбинированный поток, который на подверженном комбинированному потоку теле вызывает эффект Магнуса. Поэтому тело также называется использующим эффект Магнуса телом или использующим эффект Магнуса несущим винтом.
При комбинированном потоке вращательный воздушный поток также может дополнительно создаваться или же усиливаться тем, что использующий эффект Магнуса несущий винт приводится во вращательное движение. Вращение тела Магнуса или же использующего эффект Магнуса несущего винта может приводить к более сильному проявлению эффекта Магнуса.
Решающим для эффекта Магнуса является относительное движение между поверхностью использующего эффект Магнуса несущего винта и комбинированным потоком с упомянутым поперечным обтеканием или же поперечным набегающим потоком и циркуляционным потоком.
Необходимо специально указать на то, что, например, неподвижный использующий эффект Магнуса несущий винт или же использующее эффект Магнуса тело, например неподвижный цилиндр, в связи с вращающимся несущим винтом с поперечным направлением потока и комбинированным потоком уже может вызвать эффект Магнуса.
Например, использующий эффект Магнуса несущий винт выполнен с постоянным по оси вращения круглым поперечным сечением (диаметром), то есть использующий эффект Магнуса несущий винт является цилиндром или цилиндрическим телом в геометрическом смысле.
Например, использующий эффект Магнуса несущий винт выполнен с равномерно изменяющимся по оси вращения (круглым) диаметром, то есть, например, усеченным конусом.
Например, использующий эффект Магнуса несущий винт выполнен с увеличивающимся и снова уменьшающимся в форме параболы по оси вращения (круглым) диаметром, то есть, например, в форме шара.
Например, использующий эффект Магнуса несущий винт также может быть составлен из различных сегментов усеченного конуса и/или сегментов цилиндра.
В соответствии с еще одним аспектом изобретения ось использующего эффект Магнуса несущего винта проходит параллельно оси вращения несущего винта с поперечным направлением потока.
В соответствии с еще одним аспектом изобретения использующий эффект Магнуса несущий винт расположен концентрически с несущим винтом с поперечным направлением потока.
В соответствии с еще одним аспектом изобретения ось использующего эффект Магнуса несущего винта проходит под уклоном к оси вращения несущего винта с поперечным направлением потока, при этом ось использующего эффект Магнуса несущего винта образует, например, одну плоскость с осью вращения.
В соответствии с еще одним аспектом изобретения гибридный несущий винт имеет ось несущего винта, при этом ось использующего эффект Магнуса несущего винта образует ось несущего винта.
В соответствии с еще одним аспектом изобретения использующий эффект Магнуса несущий винт, например цилиндр, и несущий винт с поперечным направлением потока вращаются вокруг оси несущего винта. В этой связи понятие «ось несущего винта» используется в геометрическом смысле.
В соответствии с еще одним аспектом изобретения использующий эффект Магнуса несущий винт приводится в движение посредством первого вала, а несущий винт с поперечным направлением потока посредством второго вала, при этом первый и второй вал расположены, например, концентрически, например один в другом.
В соответствии с еще одним аспектом изобретения использующий эффект Магнуса несущий винт является приводимым в движение в направлении вращения несущего винта с поперечным направлением потока.
В соответствии с еще одним аспектом использующий эффект Магнуса несущий винт является приводимым в движение против направления вращения несущего винта с поперечным направлением потока, например, чтобы создать целенаправленный отбор мощности.
В соответствии с еще одним аспектом несущий винт с поперечным направлением потока и использующий эффект Магнуса несущий винт выполнены с возможностью приведения в движение и в противоположном направлении, например, для целей торможения.
В соответствии с еще одним аспектом изобретения сила согласно эффекту Магнуса, также называемая силой Магнуса, которая создается на использующем эффект Магнуса несущем винте, является подъемной силой и/или силой тяги.
В соответствии с еще одним аспектом изобретения несущий винт с поперечным направлением потока создает поток, который проходит поперек оси использующего эффект Магнуса несущего винта.
В соответствии с еще одним аспектом изобретения несущий винт с поперечным направлением потока вместе с направляющим устройством образует турбовоздуходувку (поперечную воздуходувку).
В соответствии с еще одним аспектом изобретения турбовоздуходувка служит в качестве генератора тяги.
В соответствии с одной примерной формой осуществления изобретения корпусной сегмент на обращенной к несущему винту с поперечным направлением потока стороне имеет форму дуги окружности.
В соответствии с одним аспектом изобретения корпусной сегмент выполнен с одинаковой формой поперечного сечения по всей длине использующего эффект Магнуса несущего винта.
В соответствии с одним альтернативным аспектом изобретения корпусной сегмент имеет по длине использующего эффект Магнуса несущего винта различные формы поперечного сечения. За счет этого, например, является возможным обеспечивать дополнительные аэродинамические свойства несущего винта с поперечным направлением потока в зависимости от соответствующего положения относительно летательного аппарата.
В соответствии с еще одним аспектом изобретения корпусной сегмент в поперечном сечении, то есть при рассмотрении поперек оси использующего эффект Магнуса несущего винта, имеет форму сегмента дуги окружности.
В соответствии с еще одним аспектом изобретения корпусной сегмент на обращенной от несущего винта с поперечным направлением потока стороне имеет регулируемые профильные элементы, посредством которых форма поперечного сечения на указанной стороне является изменяемой, для улучшения аэродинамических свойств. Например, изменение происходит в зависимости от поворотного положения.
В соответствии с еще одним аспектом изобретения между боковой поверхностью использующего эффект Магнуса несущего винта и вращающимися лопастями несущего винта в радиальном направлении предусмотрено расстояние, которое зависит от диаметра использующего эффект Магнуса несущего винта.
Например, диаметр использующего эффект Магнуса несущего винта имеет величину от точно такой же до двукратной величины расстояния от боковой поверхности до лопастей несущего винта.
В соответствии с еще одним примером соотношение между диаметром использующего эффект Магнуса несущего винта и расстоянием до лопастей несущего винта составляет 2:1.
В соответствии с одним аспектом изобретения глубина профиля и угол установки лопастей несущего винта могут быть выбраны свободно, при этом оба эти параметра относительно действия связаны друг с другом. Кроме того, может быть установлен диаметр несущего винта с поперечным направлением потока. Количество лопастей несущего винта, в свою очередь, связано с диаметром несущего винта с поперечным направлением потока и глубиной профиля. Если эти величины установлены, то также известен и диаметр в свету несущего винта с поперечным направлением потока, то есть расстояние лопастей несущего винта от центра. Тогда диаметр использующего эффект Магнуса несущего винта, например цилиндра, вытекает из вышеуказанного отношения расстояния между лопастями несущего винта боковой поверхностью использующего эффект Магнуса несущего винта к диаметру использующего эффект Магнуса несущего винта.
В соответствии с примерной формой осуществления изобретения лопасти несущего винта имеют в поперечном сечении соответственно изогнутую форму с вогнутой и выпуклой стороной, при этом вогнутая сторона обращена к использующему эффект Магнуса несущему винту.
В соответствии с еще одним аспектом изобретения предусмотрены по меньшей мере две, предпочтительно 16 лопастей несущего винта.
В соответствии с примерной формой осуществления изобретения лопасти несущего винта имеют в поперечном сечении соответственно угол от 15° до 70° к радиальному направлению.
В соответствии с еще одним аспектом изобретения лопасти несущего винта имеют в поперечном сечении соответственно угол в 30° к радиальному направлению.
Понятие «радиальное направление» относится к соединительной линии между осью использующего эффект Магнуса несущего винта и серединой поперечного сечения лопасти несущего винта, а направление в поперечном сечении относится при изогнутой форме поперечного сечения к тангенциальному направлению.
Как уже было упомянуто, лопасти несущего винта не изменяют свой угол во время вращения несущего винта с поперечным направлением потока.
В соответствии с еще одним аспектом изобретения лопасти несущего винта проходят в аксиальном направлении параллельно оси вращения, то есть они имеют постоянное расстояние от оси вращения.
В соответствии с еще одним аспектом изобретения лопасти несущего винта проходят в аксиальном направлении наклонно к оси вращения, при этом лопасти несущего винта имеют увеличивающееся или уменьшающееся расстояние от оси вращения, то есть лопасти несущего винта соответственно проходят в одной плоскости с осью вращения, но под наклоном к оси вращения.
В соответствии с примерной формой осуществления изобретения использующий эффект Магнуса несущий винт является цилиндром и имеет в области своих концов по одному выступающему за поверхность цилиндра концевому диску. Понятие «поверхность цилиндра» относится к боковой поверхности цилиндра или поверхности контура цилиндра.
В соответствии с еще одним аспектом изобретения диски выполнены на торцевых концах цилиндра.
В соответствии с еще одним аспектом изобретения концевые диски вращаются с цилиндром, например диски закреплены прямо на цилиндре.
В соответствии с примерной формой осуществления изобретения цилиндр имеет множество дисков, которые расположены между концевыми дисками, при этом диски имеют больший диаметр, чем боковая поверхность цилиндра.
В соответствии с еще одним аспектом упомянутые диски предусмотрены при использующем эффект Магнуса несущем винте, который имеет другую вращательно-симметричную форму.
Согласно изобретению также предусмотрен летательный аппарат, который имеет область фюзеляжа и по меньшей мере один гибридный несущий винт по одному из описанных выше конструктивных примеров и аспектов. При этом использующий эффект Магнуса несущий винт и несущий винт с поперечным направлением потока по меньшей мере одного гибридного несущего винта закреплены в области фюзеляжа. Кроме того, предусмотрено первое приводное устройство для вращения использующего эффект Магнуса несущего винта по меньшей мере одного гибридного несущего винта и второе приводное устройство для вращения несущего винта с поперечным направлением потока по меньшей мере одного гибридного несущего винта. Ось использующего эффект Магнуса несущего винта расположена поперек направления полета, например, под углом от примерно 30° до 150°, предпочтительно от 45° до 135°, еще более предпочтительно от 80° до 100°, например 90°.
Благодаря этому является возможным предоставить в распоряжение летательный аппарат, в котором гибридный несущий винт выполняет функцию тяги и функцию подъемной силы. Другими словами, по сравнению с обычным самолетом с несущей плоскостью и, например, винтовым двигателем гибридный несущий винт выполняет функцию винта для тяги и функцию несущих плоскостей для подъемной силы.
В соответствии с еще одним аспектом имеются дополнительные несущие плоскости.
В соответствии с еще одним аспектом изобретения для управления летательным аппаратом предусмотрено горизонтальное оперение и вертикальное оперение, например, в задней секции области фюзеляжа.
В соответствии с еще одним примером осуществления изобретения летательный аппарат имеет продольную ось и по обе стороны от продольной оси предусмотрен соответственно по меньшей мере один гибридный несущий винт по одному из предшествующих конструктивных примеров и аспектов.
В соответствии с еще одним аспектом изобретения предусмотрены по меньшей мере два гибридных несущего винта, которые расположены на противолежащих сторонах продольной оси, при этом по меньшей мере два гибридных несущего винта находятся на расстоянии друг от друга и образуют приводную пару или же приводную группу.
В соответствии с еще одним аспектом изобретения для управления летательным аппаратом предусмотрены различные скорости вращения на гибридный несущий винт, то есть посредством различного управления гибридными несущими винтами по обе стороны продольной оси могут быть созданы разные подъемные силы и силы тяги.
В соответствии с еще одним примером осуществления изобретения предусмотрены по меньшей мере два разнесенных в продольном направлении гибридных несущих винта по одному из приведенных выше конструктивных примеров и аспектов.
В соответствии с еще одним аспектом изобретения в продольном направлении предусмотрены по меньшей мере две приводные пары или же приводные группы.
Изобретение также содержит применение гибридного несущего винта по одному из описанных выше конструктивных примеров и аспектов в летательном аппарате.
В соответствии с еще одним аспектом изобретения также предусмотрено применение летательного аппарата с гибридным несущим винтом по одному из приведенных выше конструктивных примеров и аспектов.
В соответствии с еще одним примером осуществления изобретения предусмотрен способ полета летательного аппарата, который включает следующие стадии:
а) вращение использующего эффект Магнуса несущего винта вокруг оси использующего эффект Магнуса несущего винта, при этом использующий эффект Магнуса несущий винт имеет замкнутую боковую поверхность для создания силы согласно эффекту Магнуса,
б) вращение несущего винта с поперечным направлением потока вокруг оси вращения, который имеет множество проходящих аксиально лопастей несущего винта, которые выполнены неподвижными относительно тангенциального углового положения, при этом вращение несущего винта с поперечным направлением потока для летательного аппарата производит силу тяги, которая проходит поперек оси использующего эффект Магнуса несущего винта, при этом использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, а ось вращения проходит в направлении оси использующего эффект Магнуса несущего винта, и
в) ориентация корпусного сегмента направляющего устройства, который в направлении контура частично окружает несущий винт с поперечным направлением потока, посредством поворота корпусного сегмента относительно оси использующего эффект Магнуса несущего винта таким образом, что несущим винтом с поперечным направлением потока на использующем эффект Магнуса несущем винте вызывается поперечный набегающий поток, посредством которого создается сила согласно эффекту Магнуса.
В соответствии с еще одним аспектом изобретения при вращении использующего эффект Магнуса несущего винта создается подъемная сила.
В соответствии с еще одним аспектом изобретения при вращении использующего эффект Магнуса несущего винта создается сила тяги, которая усиливает созданную несущим винтом с поперечным направлением потока силу тяги.
В соответствии с еще одним аспектом изобретения несущими винтами обоих типов создается сила, которая имеет вектор подъемной силы и вектор тяги.
В соответствии с еще одним аспектом изобретения набегающий поперечный поток использующего эффект Магнуса несущего винта предусмотрен таким образом, что он создает силу согласно эффекту Магнуса, которая действует на летательном аппарате.
В соответствии с еще одним аспектом изобретения сила согласно эффекту Магнуса является силой тяги и подъемной силой, как уже упомянуто выше.
В соответствии с еще одним конструктивным примером изобретения вращение использующего эффект Магнуса несущего винта и вращение несущего винта с поперечным направлением потока, а также поворот направляющего устройства выполнены с возможностью отдельной регулировки таким образом, что являются устанавливаемыми различные силы привода и силы тяги.
При этом концепция управления содержит следующие аспекты:
1. Скорость вращения несущего винта с поперечным направлением потока оказывает влияние на скорость протекающего воздуха и, тем самым, также и на тягу.
2. Скорость вращения использующего эффект Магнуса несущего винта оказывает влияние на отклонение набегающего воздуха и, тем самым, за счет эффекта Магнуса и на подъемную силу.
3. Поворотный дефлектор оказывает влияние на направление обтекающего гибридный несущий винт и протекающего через гибридный несущий винт воздуха и, тем самым, на направление совокупной силы (из тяги и подъемной силы).
Следовательно, указанные возможности регулирования делают возможными изменения скорости вращения, которые оказывают влияние на величину сил. Изменение положения дефлектора оказывает влияние на направление сил.
В соответствии с еще одним аспектом изобретения являются устанавливаемыми различные направления полета.
В соответствии с еще одним аспектом изобретения направляющее устройство устанавливается таким образом, что создается вертикальная подъемная сила и сила тяги, которая обеспечивает возможность вертикального взлета летательного аппарата или укороченного взлета, то есть взлета с экстремально малой взлетной дистанцией.
Необходимо указать на то, что признаки конструктивных примеров и аспектов устройств также относятся и к вариантам осуществления способа, а также применению устройства и наоборот. Кроме того, и те признаки, для которых это специально не указано, могут свободно комбинироваться друг с другом.
Далее на прилагаемых чертежах более детально рассматривается пример осуществления изобретения.
На фиг.1 показан летательный аппарат с гибридным несущим винтом согласно примеру осуществления изобретения,
на фиг.2 - гибридный несущий винт согласно изобретению в схематическом поперечном сечении,
на фиг.3 - фрагмент гибридного несущего винта, представленного на фиг.2,
на фиг.4 - еще одна конструктивная форма летательного аппарата с гибридным несущим винтом согласно изобретению,
на фиг.5 - другие конструктивные формы гибридного несущего винта согласно изобретению,
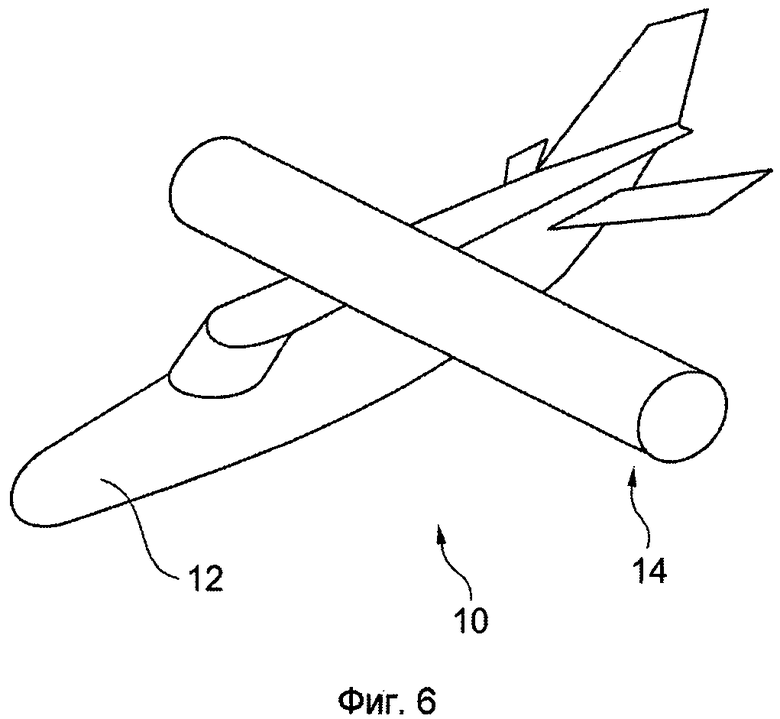
на фиг.6 - еще одна конструктивная форма летательного аппарата с гибридным несущим винтом согласно изобретению,
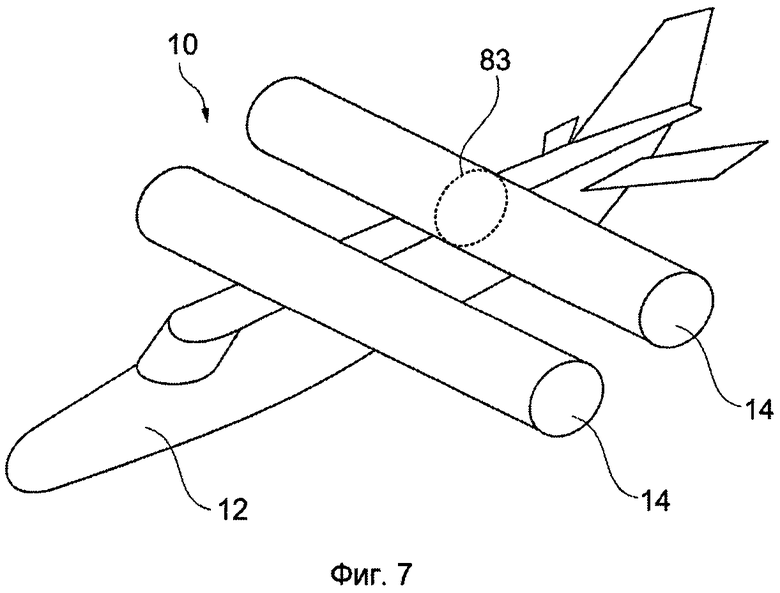
на фиг.7 - еще одна конструктивная форма летательного аппарата с гибридным несущим винтом согласно изобретению,
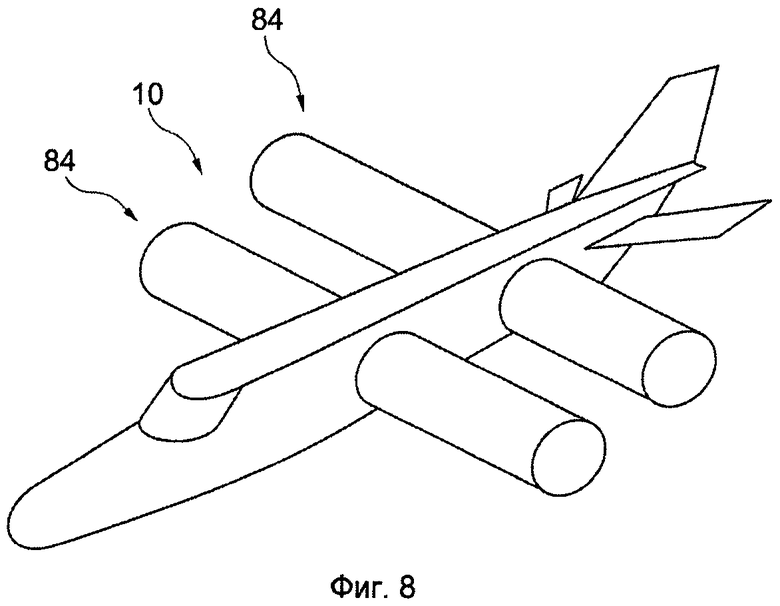
на фиг.8 - еще одна конструктивная форма летательного аппарата с гибридным несущим винтом согласно изобретению,
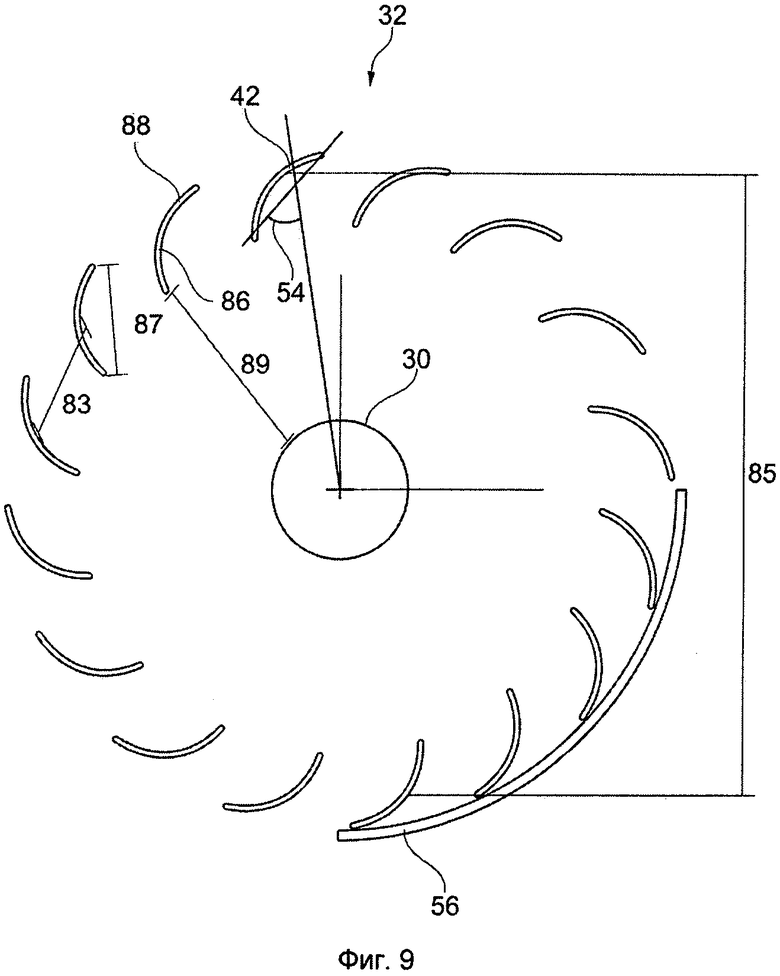
на фиг.9 - еще одна конструктивная форма гибридного несущего винта согласно изобретению в виде в разрезе,
на фиг.10 - еще одна конструктивная форма гибридного несущего винта согласно изобретению,
на фиг.11 - способ полета летательного аппарата с гибридным несущим винтом согласно примеру осуществления изобретения.
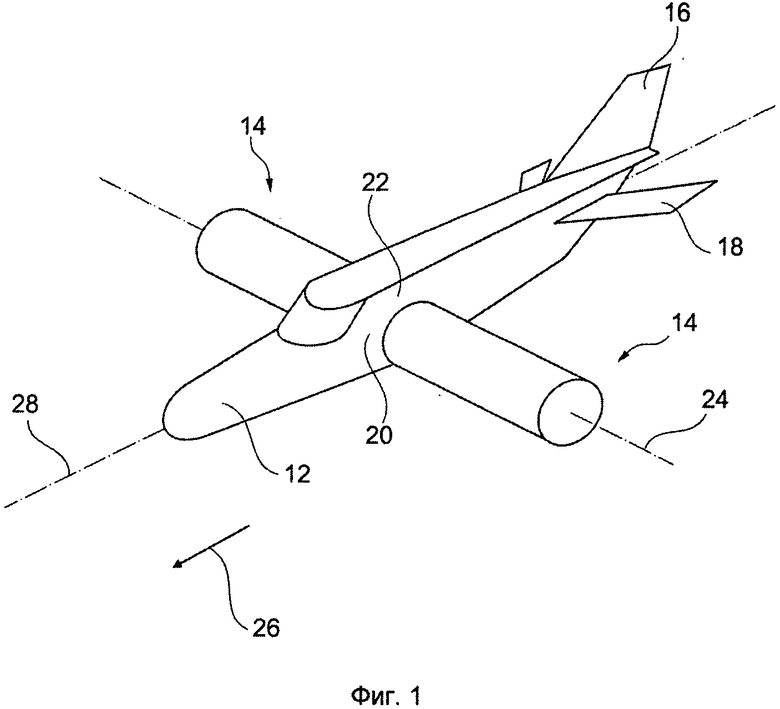
На фиг.1 показан летательный аппарат 10 в виде в перспективе. Летательный аппарат 10 имеет область 12 фюзеляжа и по меньшей мере один гибридный несущий винт 14. Например, предусмотрено два гибридных несущих винта, из которых соответственно один расположен на одной стороне области фюзеляжа. Кроме того, летательный аппарат 10 имеет вертикальное оперение 16, а также горизонтальное оперение 18 в задней секции области фюзеляжа.
Показанный на фиг.1 летательный аппарат выполнен, например, в виде самолета, при этом наряду с относительно малыми пассажирскими самолетами предусмотрены и самолеты большой вместимости для пассажиров, а также транспортные самолеты и другие виды самолетов.
В соответствии с еще одним аспектом изобретения, который, однако, более детально не представлен, в случае с летательным аппаратом речь может идти и о другом типе транспортного средства, например о дирижабле.
Со ссылкой на фиг.1 гибридный несущий винт 14 имеет использующий эффект Магнуса несущий винт, несущий винт с поперечным направлением потока и направляющее устройство, которые здесь, однако, более конкретно не снабжены ссылочными обозначениями, а более детально поясняются на следующих чертежах.
Использующий эффект Магнуса несущий винт и несущий винт с поперечным направлением потока по меньшей мере одного гибридного несущего винта закреплены в области фюзеляжа. Кроме того, летательный аппарат 10 имеет первое приводное устройство 20 для вращения использующего эффект Магнуса несущего винта по меньшей мере одного гибридного несущего винта и второе приводное устройство 22 для вращения несущего винта с поперечным направлением потока по меньшей мере одного гибридного несущего винта. Ось использующего эффект Магнуса несущего винта, снабженная на фиг.1 ссылочным обозначением 24, расположена поперек направления полета, которое на фиг.1 обозначено стрелкой 26.
В соответствии с еще одним аспектом изобретения, который также показан на фиг.1, летательный аппарат 10 имеет продольную ось 28, и по обе стороны продольной оси 28 предусмотрено по меньшей мере по одному гибридному несущему винту 14.
Прежде чем на фиг.6, 7 и 8 будут подробно рассмотрены другие конструктивные примеры относительно расположения и количества гибридных несущих винтов, следует более детально пояснить гибридный несущий винт 14 на фиг.2 и последующих чертежах.
На фиг.2 гибридный несущий винт 14 показан в схематическом виде в разрезе. Гибридный несущий винт 14 для летательного аппарата имеет использующий эффект Магнуса несущий винт 30, несущий винт 32 с поперечным направлением потока и направляющее устройство 34.
Использующий эффект Магнуса несущий винт 30 посредством приводного устройства выполнен с возможностью вращательного приведения в движение вокруг своей оси использующего эффект Магнуса несущего винта и имеет замкнутую боковую поверхность 36. Ось использующего эффект Магнуса несущего винта обозначена ссылочным обозначением 38.
Необходимо указать на то, что гибридный несущий винт 14 содержит использующий эффект Магнуса несущий винт 30, несущий винт 32 с поперечным направлением потока и направляющее устройство 34. Хотя первые и вторые приводные устройства 20, 22 и упомянуты в этой связи, но в описанной конструктивной форме они не являются непосредственной составной частью гибридного несущего винта 14 согласно изобретению.
В соответствии с еще одним аспектом гибридный несущий винт 14, наряду с использующим эффект Магнуса несущим винтом 30 и несущим винтом 32 с поперечным направлением потока, а также направляющим устройством 34, также содержит первое приводное устройство 20 и второе приводное устройство 22.
Например, использующий эффект Магнуса несущий винт 30 может приводиться в движение первым приводным устройством 20, которое упомянуто на фиг.1, но там более детально не представлено.
Несущий винт 32 с поперечным направлением потока закреплен с возможностью вращения вокруг оси вращения и имеет множество 40 проходящих аксиально лопастей 42 несущего винта, которые приводным устройством могут быть приведены во вращение вокруг оси вращения. Например, лопасти 42 несущего винта могут быть приведены во вращение вторым приводным устройством 22, которое было упомянуто в связи с фиг.1.
Использующий эффект Магнуса несущий винт 30 расположен внутри несущего винта 32 с поперечным направлением потока, а ось 38 использующего эффект Магнуса несущего винта проходит в направлении оси вращения.
Например, ось 38 использующего эффект Магнуса несущего винта проходит параллельно оси вращения.
В соответствии с одним аспектом изобретения использующий эффект Магнуса несущий винт 30 расположен концентрически с несущим винтом 32 с поперечным направлением потока.
В соответствии с не показанным конструктивным примером использующий эффект Магнуса несущий винт 30 расположен внутри несущего винта 32 с поперечным направлением потока, при этом соответствующие оси вращения смещены относительно друг друга. При этом оси вращения могут иметь угол друг к другу и лежать, например, в одной плоскости.
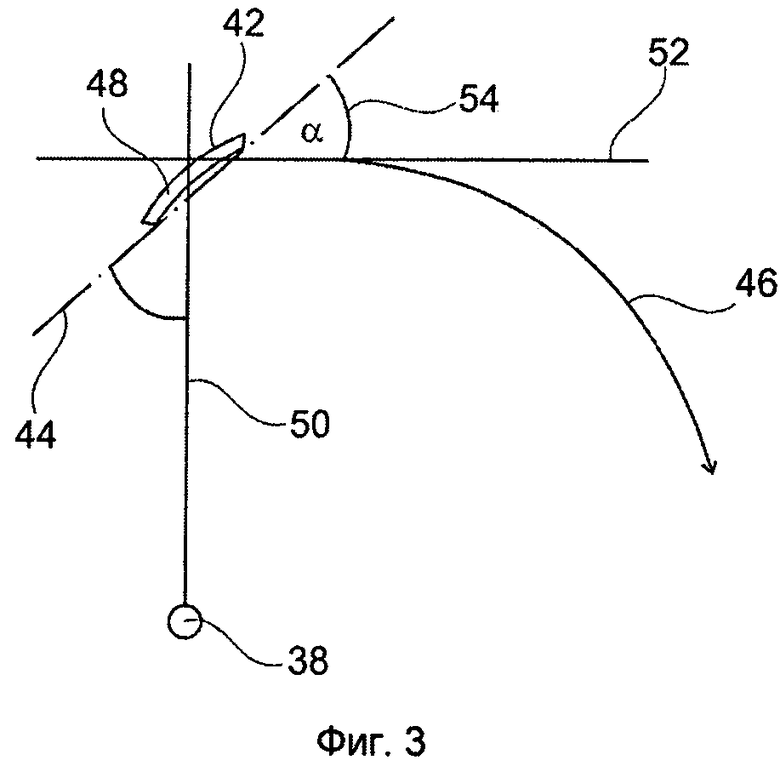
Лопасти 42 несущего винта выполнены неподвижными относительно тангенциального углового положения. Под тангенциальным угловым положением подразумевается тот угол, который лопасти несущего винта соответственно занимают относительно касательной. Как показано на фиг.3, лопасть 42 несущего винта имеет соединительную линию 44 между обеими внешними точками выполненной, например, изогнутой лопасти 42 несущего винта. При вращении несущего винта с поперечным направлением потока лопасть 42 несущего винта совершает движение вдоль круговой траектории 46 вокруг оси использующего эффект Магнуса несущего винта в качестве центра или же оси вращения. Ось вращения или же ось 38 использующего эффект Магнуса несущего винта может быть соединена с воображаемым центром 48 лопасти 42 несущего винта, что показано радиально проходящей соединительной линией 50. Перпендикулярно к этой соединительной линии 50 изображена касательная 52. Лопасть 42 несущего винта со своей ориентацией, которая обозначена линией 44, имеет угловое положение 54, которое на фиг.3 дополнительно обозначено символом а.
Необходимо указать на то, что хотя прямая 44 направления не проходит через воображаемый центр лопасти несущего винта, так что прямая 44 направления не пересекает и касательную 52 в центре 48 лопасти несущего винта, но проходящая параллельно прямой 44 направления линия принимала бы такой же угол 54 к касательной 52.
В соответствии с показанным конструктивным примером лопасти 42 несущего винта проходят в аксиальном направлении параллельно оси вращения, то есть они имеют постоянное расстояние от оси вращения.
В соответствии с еще одним, не показанным более детально аспектом изобретения лопасти 42 несущего винта в аксиальном направлении проходят наклонно к оси вращения, при этом лопасти несущего винта имеют увеличивающееся или уменьшающееся расстояние от оси вращения, то есть лопасти несущего винта соответственно проходят в одной плоскости с осью вращения, но наклонно к оси вращения.
Показанное на фиг.2 направляющее устройство 34 имеет корпусной сегмент 56, который частично окружает несущий винт с поперечным направлением потока в направлении контура. Корпусной сегмент 56 имеет механизм 58 изменения положения, с помощью которого корпусной сегмент 56 выполнен с возможностью поворота относительно оси 38 использующего эффект Магнуса несущего винта, что обозначено символом в виде двунаправленной стрелки 60.
В соответствии с еще одним аспектом изобретения механизм изменения положения имеет один или несколько исполнительных органов или другой привод для того, чтобы осуществлять поворот или же стопорение в соответственно достигнутом положении, что, однако, более детально не показано.
Как обозначено на фиг.2 символическими стрелками 62 направления потока, корпусной сегмент 56 поддается ориентировке таким образом, что несущий винт 32 с поперечным направлением потока обуславливает силу 64 тяги, которая символически показана стрелкой, и одновременно поперечный набегающий поток на использующем эффект Магнуса несущем винте, что обозначено символами 66 в виде стрелок.
Как обозначено на фиг.2 вращательной стрелкой 68, вращение несущего винта с поперечным направлением потока происходит по часовой стрелке, что, впрочем, получается уже в результате положения лопастей несущего винта.
Кроме того, вращательной стрелкой 70 использующего эффект Магнуса несущего винта обозначено, что в этом показанном конструктивном примере использующий эффект Магнуса несущий винт тоже вращается по часовой стрелке.
В результате поперечного набегающего потока 66 и вращения 70 использующего эффект Магнуса несущего винта создается сила 72 согласно эффекту Магнуса. Эта сила 72 обуславливает подъемную силу 74 гибридного несущего винта в дополнение к силе тяги 64.
Как более детально не показано, использующий эффект Магнуса несущий винт приводится в движение первым валом, а несущий винт с поперечным направлением потока - вторым валом, которые расположены, например, концентрически, например, проходя один в другом.
Несущий винт 32 с поперечным направлением потока вместе с направляющим устройством 34 образует турбовоздуходувку, которая формирует поток, который проходит поперек оси 38 использующего эффект Магнуса несущего винта.
Как, кроме того, видно на фиг.2, корпусной сегмент имеет обращенную к несущему винту с поперечным направлением потока сторону 76. Эта обращенная к несущему винту с поперечным направлением потока сторона 76 имеет форму дуги окружности, которая находится в связи с вращающимися лопастями 42 несущего винта.
В соответствии с одной конструктивной формой корпусной сегмент 56 выполнен с одинаковым поперечным сечением по всей длине использующего эффект Магнуса несущего винта. В качестве альтернативы этому также предусмотрено, что корпусной сегмент может иметь различные формы поперечного сечения по длине использующего эффект Магнуса несущего винта, что, однако, более детально не показано.
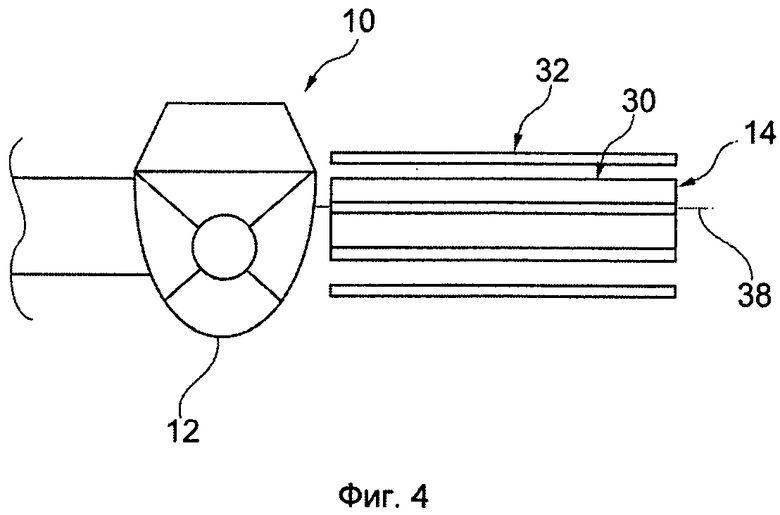
На фиг.4 показан еще один конструктивный пример, в котором летательный аппарат 10 показан в схематическом и сильно упрощенном виде спереди. Как видно, находящийся на чертеже справа гибридный несущий винт 14, то есть относительно направления полета гибридный несущий винт по левому борту, имеет использующий эффект Магнуса несущий винт 30 и несущий винт 32 с поперечным направлением потока. Кроме того, имеется направляющее устройство 34, что, однако, более детально не показано.
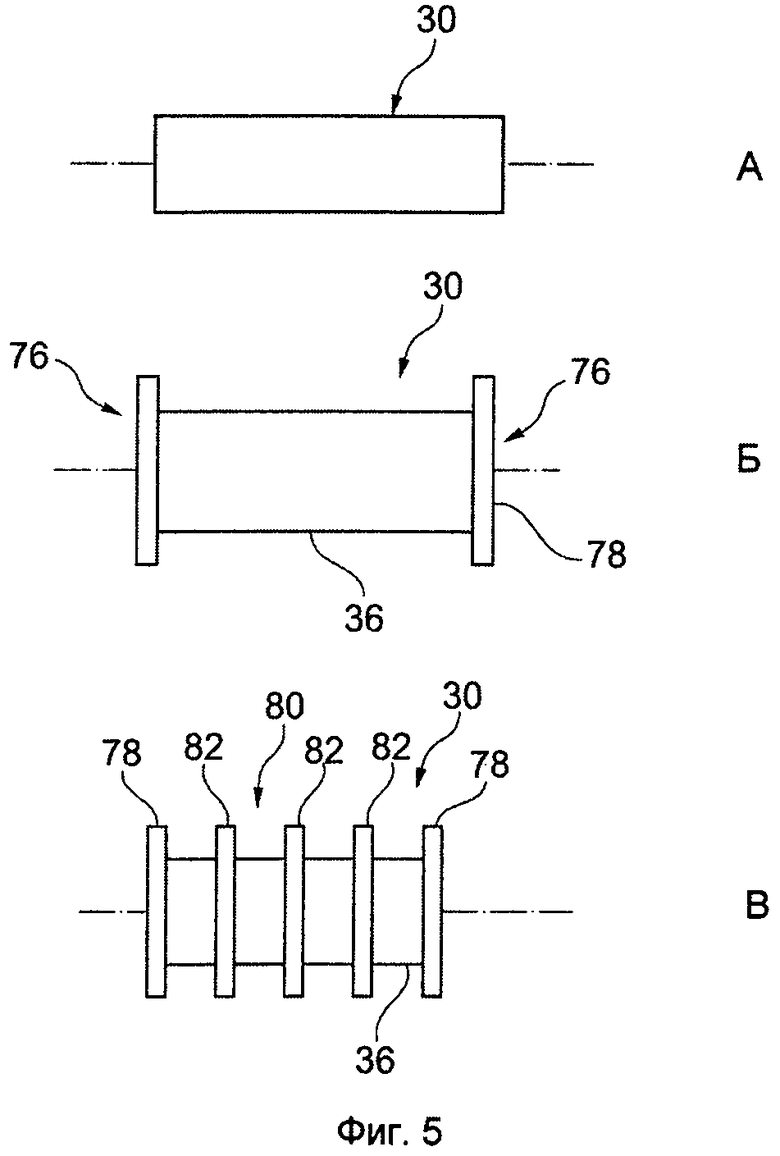
На фиг.5А показан гибридный несущий винт 14 с использующим эффект Магнуса несущим винтом 30, который выполнен, например, в виде цилиндра.
В соответствии с еще одним аспектом изобретения, который, однако, более детально не показан, использующий эффект Магнуса несущий винт выполнен в виде усеченного конуса или составлен из различных сегментов усеченного конуса и/или сегментов цилиндра. Например, использующий эффект Магнуса несущий винт также может иметь другие вращательно-симметричные формы или сегменты других вращательно-симметричных форм, например, сферические формы, как шар.
В соответствии с еще одним конструктивным примером, который показан на фиг.5Б, использующий эффект Магнуса несущий винт является цилиндром и имеет в области своих концов 76 по одному выступающему за поверхность цилиндра концевому диску 78. Например, концевые диски 78 выполнены на торцевых концах цилиндра и вращаются с цилиндром.
В соответствии с еще одним конструктивным примером, который показан на фиг.5В, цилиндр использующего эффект Магнуса несущего винта имеет множество 80 дисков 82, которые расположены между обоими концевыми дисками, при этом диски 82 имеют больший диаметр, чем боковая поверхность 36 цилиндра.
Как показано на фиг.5в, концевые дики 78 и диски 82 имеют одинаковый диаметр. В соответствии с еще одним конструктивным примером, который, однако, не показан, диски 82 имеют иной диаметр, чем диски 78 на конце, например, меньший диаметр. Кроме того, предусмотрено, что в еще одном конструктивном примере, который также не показан, диски 82 имеют разные диаметры, например, уменьшающиеся в направлении области фюзеляжа.
Еще один аспект показан на фиг.6. В соответствии с одним конструктивным примером летательный аппарат 10 выполнен с гибридным несущим винтом 14, который, например, предусмотрен над фюзеляжем и выступает по обе стороны области фюзеляжа или же вверх.
В соответствии с еще одним конструктивным примером летательный аппарат 10 выполнен с двумя гибридными несущими винтами 14, которые в продольном направлении находятся на расстоянии друг от друга. Как схематически показано на фиг.7, установлено два соответственно явно выступающих за боковые области фюзеляжа 12 гибридных несущих винта 14.
Показанные гибридные несущие винты 14 в соответствии с еще одним конструктивным примером также могут быть выполнены как соответственно два расположенных непосредственно рядом друг с другом гибридных несущих винта 14, что на фиг.14 в качестве примера для заднего гибридного несущего винта 14 обозначено стыком 83.
В соответствии с еще одним конструктивным примером, который уже был представлен на фиг.1, перпендикулярно продольной оси 28 предусмотрены по меньшей мере два гибридных несущих винта 14, которые расположены на противолежащих сторонах продольной оси 28, при этом по меньшей мере два гибридных несущего винта разнесены между собой, например, находящейся между ними областью 12 фюзеляжа и образуют приводную пару или же приводную группу 84.
На фиг.8 показан конструктивный пример, в котором летательный аппарат 10 в продольном направлении имеет две приводные пары или же приводные группы 84.
На фиг.9 показан еще один конструктивный пример несущего винта 32 с поперечным направлением потока. В показанном конструктивном примере несущий винт 32 с поперечным направлением потока имеет лопасти 42 несущего винта в количестве 16.
В соответствии с еще одним конструктивным примером предусмотрены по меньшей мере две лопасти 42 несущего винта, что, однако, более детально не показано.
Лопасти несущего винта имеют в поперечном сечении соответственно изогнутую форму с вогнутой стороной 86 и выпуклой стороной 88. Как видно, вогнутая сторона 86 обращена к использующему эффект Магнуса несущему винту 30.
В соответствии с еще одним аспектом изобретения форма поперечного сечения лопастей несущего винта изменяется по ходу их длины, то есть по ширине летательного аппарата.
Использующий эффект Магнуса несущий винт 30 на фиг.9 обозначен лишь символически и может, прежде всего, по своему размеру относительно несущего винта с поперечным направлением потока может быть выполнен и другим.
Как уже было пояснено в связи на фиг.3, лопасти несущего винта в поперечном сечении имеют угол 54 к радиальному направлению. Например, величина этого угла 54 составляет от приблизительно 15° до 70°.
Как показано на фиг.9, в соответствии с одним конструктивным примером лопасти несущего винта имеют соответственно угол в 30° к радиальному направлению.
В соответствии с еще одним аспектом изобретения (более детально не показанным) между боковой поверхностью использующего эффект Магнуса несущего винта и вращающимися лопастями несущего винта в радиальном направлении предусмотрено расстояние, которое зависит от диаметра использующего эффект Магнуса несущего винта.
Например, диаметр использующего эффект Магнуса несущего винта имеет величину от точно такой же до двукратной величины расстояния от боковой поверхности до лопастей несущего винта.
В соответствии с еще одним примером отношение между диаметром использующего эффект Магнуса несущего винта и расстоянием до лопастей несущего винта составляет 2:1.
В соответствии с еще одним аспектом изобретения предусмотрено расстояние 89 в радиальном направлении между вращающимися лопастями 42 несущего винта и боковой поверхностью 36, которое составляет от однократной до двукратной величины глубины 87 профиля лопасти 42 несущего винта.
Как уже было упомянуто, в соответствии с еще одним примером, отличающимся от фиг.9, расстояние составляет от однократной величины до половины диаметра использующего эффект Магнуса несущего винта.
В соответствии с еще одним аспектом изобретения лопасти 42 несущего винта имеют диаметр 85, который составляет от пяти- до восьмикратной величины глубины 87 профиля лопасти 42 несущего винта.
В соответствии с еще одним аспектом изобретения предусмотрено расстояние между лопастями 42 несущего винта по периферии, которое является, по меньшей мере, таким же, как глубина 87 профиля лопастей 42 несущего винта.
Глубина профиля, расстояние по периферии, а также количество лопастей несущего винта являются, например, в принципе свободно выбираемыми. Тогда из этого получаются, например, при использовании предпочтительного отношения «расстояние/ диаметр использующего эффект Магнуса несущего винта» диаметр использующего эффект Магнуса несущего винта и расстояние между лопастями несущего винта и боковой поверхностью использующего эффект Магнуса несущего винта.
Как уже было упомянуто выше, например, предусмотрено, что скорость вращения использующего эффект Магнуса несущего винта, а также направление вращения является управляемым или же устанавливаемым независимо от скорости вращения несущего винта с поперечным направлением потока.
Кроме того, на фиг.9 схематически обозначен дефлектор 56, прежде всего относительно размера или же конструктивного исполнения.
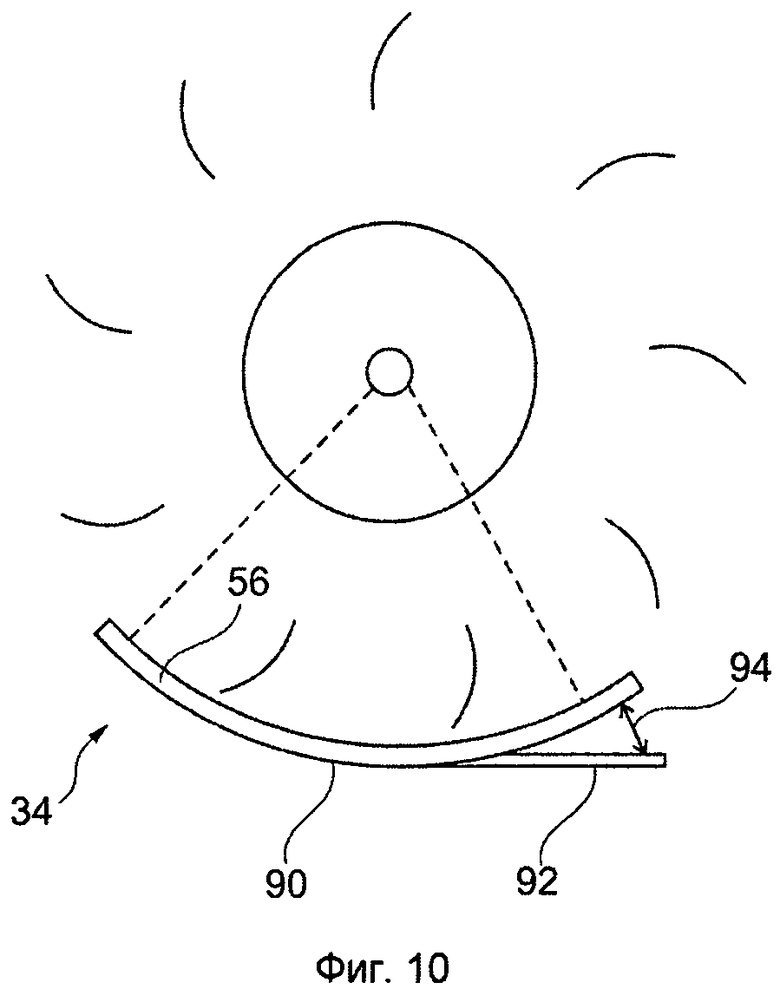
На фиг.10 показан еще один конструктивный пример гибридного несущего винта, в котором корпусной сегмент 56 направляющего устройства 34 имеет обращенную от несущего винта с поперечным направлением потока сторону 90, на которой предусмотрены выполненные с возможностью изменения положения профильные элементы 92, посредством которых является изменяемой форма поперечного сечения на указанной стороне 90, что символически обозначено двунаправленной стрелкой 94. Необходимо указать на то, что профильные элементы 92 показаны только в правой области, но также могут быть предусмотрены и в левой, то есть относительно направления полета при использовании линий потока из фиг.2 передней области направляющего устройства 34. Изменение формы поперечного сечения происходит, например, в зависимости от поворотного положения направляющего устройства.
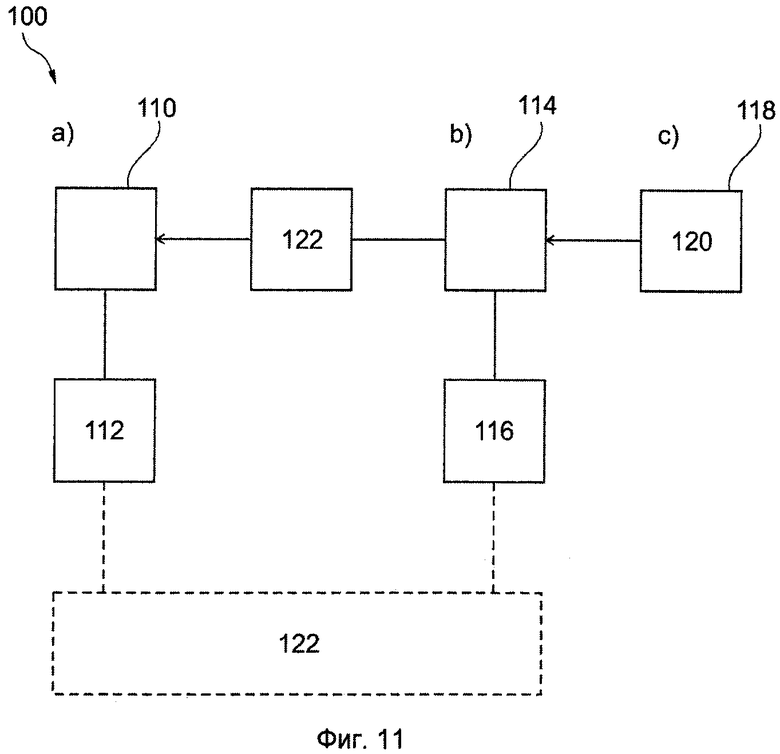
Согласно изобретению также предусмотрен способ 100 полета летательного аппарата, который показан на фиг.11 и включает следующие стадии.
На стадии а) предусмотрено вращение 110 использующего эффект Магнуса несущего винта вокруг оси использующего эффект Магнуса несущего винта, при этом использующий эффект Магнуса несущий винт для создания силы 112 согласно эффекту Магнуса имеет замкнутую боковую поверхность.
На стадии б) предусмотрено вращение 114 несущего винта с поперечным направлением потока вокруг оси вращения, который имеет множество проходящих аксиально лопастей несущего винта, которые выполнены неподвижными относительно тангенциального углового положения, при этом вращение несущего винта с поперечным направлением потока создает для летательного аппарата силу 116 тяги, которая проходит поперек оси использующего эффект Магнуса несущего винта.
При этом использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, а ось вращения проходит в направлении оси использующего эффект Магнуса несущего винта.
На стадии в) предусмотрена ориентировка 118 корпусного сегмента направляющего устройства, который в направлении контура частично окружает несущий винт с поперечным направлением потока, для чего предусмотрен поворот 120 корпусного сегмента относительно оси использующего эффект Магнуса несущего винта таким образом, что посредством несущего винта с поперечным направлением потока на использующем эффект Магнуса несущем винте вызывается поперечный набегающий поток 112, посредством которого создается сила 112 согласно эффекту Магнуса.
В соответствии с еще одним аспектом изобретения три стадии а), б) и в) происходят одновременно или же стадия в) по потребности.
В соответствии с еще одним аспектом изобретения в результате вращения 110 использующего эффект Магнуса несущего винта создается подъемная сила. В соответствии с еще одним аспектом изобретения при вращении использующего эффект Магнуса несущего винта также или альтернативно создается сила тяги.
Таким образом, относительно летательного аппарата создаются две силы, а именно сила 112 согласно эффекту Магнуса и сила 116 тяги.
В соответствии с еще одним конструктивным примером, что на фиг.11 обозначено пунктирной линией и прямоугольником, создается сила 112, которая имеет вектор подъемной силы и вектор тяги.
В соответствии с еще одним аспектом изобретения, который, однако, на фиг.11 более детально не показан, вращение 110 использующего эффект Магнуса несущего винта и вращение 114 несущего винта с поперечным направлением потока, а также поворот 120 направляющего устройства выполнены с возможностью отдельной регулировки таким образом, что являются устанавливаемыми различные силы привода и силы тяги или же различные доли вектора привода и вектора тяги.
В соответствии с еще одним аспектом посредством этого являются устанавливаемыми разные направления полета, при этом, прежде всего, следует подчеркнуть, что направляющее устройство может быть установлено так, что создается вертикальная подъемная сила и сила тяги, которая делает возможным вертикальный взлет летательного аппарата или же укороченный взлет, то есть взлет с экстремально короткой взлетной дистанцией.
Описанные выше конструктивные примеры могут по-разному комбинироваться. Прежде всего, аспекты устройств также могут применяться для форм осуществления способа, а также применения устройств и наоборот.
Дополнительно необходимо указать на то, что понятие «содержащий» не исключает другие элементы или стадии, а понятие «одна» или «один» не исключает множество. Кроме того, необходимо указать на то, что признаки или стадии, которые описаны со ссылкой на один из вышеприведенных примеров осуществления, могут быть также применены в комбинации с другими признаками или стадиями других вышеописанных примеров осуществления. Ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОСИЛОВОЙ ГИБРИДНЫЙ РОТОР | 2011 |
|
RU2579426C2 |
| Летательный аппарат на основе эффекта Магнуса | 2024 |
|
RU2827521C1 |
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2015 |
|
RU2629635C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2682954C1 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ | 1992 |
|
RU2041137C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2019 |
|
RU2711768C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
Изобретение относится к конструкциям движителей летательных аппаратов. Гибридный несущий винт (14) для летательного аппарата имеет использующий эффект Магнуса несущий винт (30), несущий винт (32) с поперечным направлением потока и направляющее устройство (34). Использующий эффект Магнуса несущий винт посредством первого приводного устройства (20) приводится в движение вокруг оси (38) и имеет замкнутую боковую поверхность (36). Несущий винт с поперечным направлением потока вращательно закреплен вокруг оси вращения и имеет множество (40) проходящих аксиально лопастей (42), которые посредством второго приводного устройства (22) приводятся в движение вокруг оси вращения и которые выполнены неподвижными относительно тангенциального углового положения (54). Использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, и ось использующего эффект Магнуса несущего винта проходит в направлении оси вращения. Направляющее устройство имеет корпусной сегмент (56), который в направлении контура частично окружает несущий винт с поперечным направлением потока, при этом корпусной сегмент имеет механизм (58) изменения положения относительно оси использующего эффект Магнуса несущего винта. Достигается снижение веса и повышение экономичности при изготовлении. 4 н. и 8 з.п. ф-лы, 11 ил.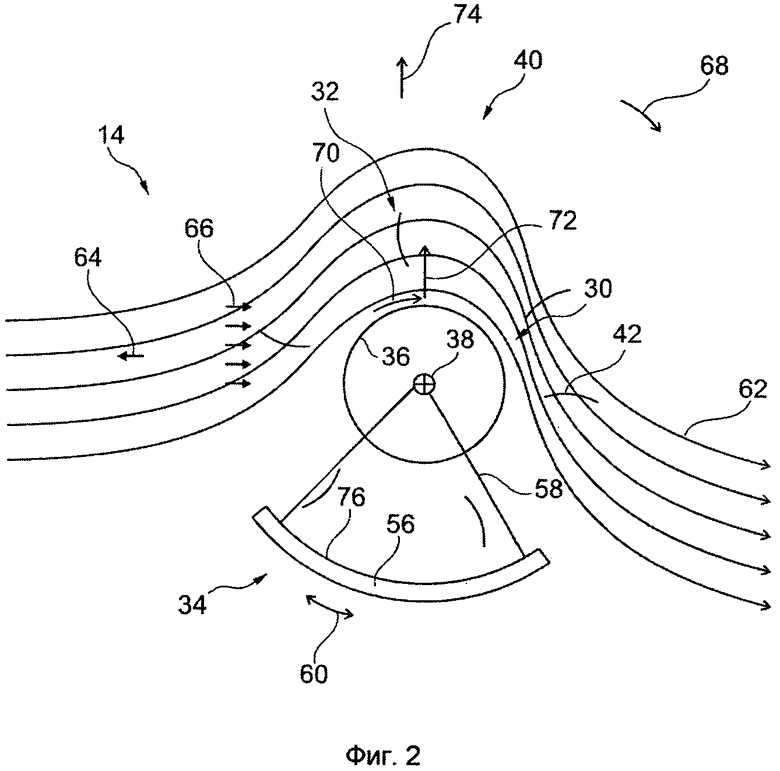
1. Гибридный несущий винт (14) для летательного аппарата с:
- использующим эффект Магнуса несущим винтом (30),
- несущим винтом (32) с поперечным направлением потока, и
- направляющим устройством (34),
при этом использующий эффект Магнуса несущий винт посредством первого приводного устройства (20) выполнен с возможностью вращательного приведения в движение вокруг оси (38) использующего эффект Магнуса несущего винта и имеет замкнутую боковую поверхность (36),
при этом несущий винт с поперечным направлением потока вращательно закреплен вокруг оси вращения и имеет множество (40) проходящих аксиально лопастей (42) несущего винта, которые посредством второго приводного устройства (22) выполнены с возможностью вращательного приведения в движение вокруг оси вращения и которые выполнены неподвижными относительно тангенциального углового положения (54),
при этом использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, и ось использующего эффект Магнуса несущего винта проходит в направлении оси вращения,
при этом направляющее устройство имеет корпусной сегмент (56), который в направлении контура частично окружает несущий винт с поперечным направлением потока, при этом корпусной сегмент имеет механизм (58) изменения положения и по меньшей мере относительно оси использующего эффект Магнуса несущего винта выполнен с возможностью поворота,
при этом корпусной сегмент выполнен с возможностью ориентации таким образом, что несущий винт с поперечным направлением потока создает силу (64) тяги и вызывает поперечный набегающий поток (66) на использующем эффект Магнуса несущем винте таким образом, что создается сила (72) согласно эффекту Магнуса, которая действует в качестве подъемной силы.
2. Гибридный несущий винт по п.1, в котором корпусной сегмент на обращенной к несущему винту с поперечным направлением потока стороне имеет форму дуги окружности.
3. Гибридный несущий винт по п.1 или 2, в котором лопасти несущего винта в поперечном сечении имеют соответственно изогнутую форму с вогнутой (86) и выпуклой (88) сторонами, при этом вогнутая сторона обращена к использующему эффект Магнуса несущему винту.
4. Гибридный несущий винт по п.1 или 2, в котором лопасти несущего винта в поперечном сечении имеют соответственно угол (54) от 15° до 70° к радиальному направлению.
5. Гибридный несущий винт по п.1 или 2, в котором использующий эффект Магнуса несущий винт является цилиндром и в области своих концов (76) имеет по одному выступающему за поверхность цилиндра концевому диску (78).
6. Гибридный несущий винт по п.5, в котором цилиндр имеет множество (80) дисков (82), которые расположены между обоими концевыми дисками, при этом диски имеют больший диаметр, чем боковая поверхность цилиндра.
7. Летательный аппарат (10), имеющий:
- область (12) фюзеляжа,
- по меньшей мере один гибридный несущий винт (14) по одному из предшествующих пунктов, при этом использующий эффект Магнуса несущий винт и несущий винт с поперечным направлением потока по меньшей мере одного гибридного несущего винта закреплены в области фюзеляжа,
при этом предусмотрены первое приводное устройство (20) для вращения использующего эффект Магнуса несущего винта (30) по меньшей мере одного гибридного несущего винта (14) и второе приводное устройство (22) для вращения несущего винта (32) с поперечным направлением потока по меньшей мере одного гибридного несущего винта,
при этом ось использующего эффект Магнуса несущего винта расположена поперек направления полета (26).
8. Летательный аппарат по п.7, при этом летательный аппарат имеет продольную ось (28), и по обе стороны продольной оси предусмотрено по меньшей мере по одному гибридному несущему винту по одному из пп.1-6.
9. Летательный аппарат по п.7 или 8, при этом предусмотрено два разнесенных в продольном направлении гибридных несущих винта по одному из пп.1-6.
10. Применение гибридного несущего винта по одному из п.п.1-6 в летательном аппарате.
11. Способ (100) полета летательного аппарата, включающий следующие стадии:
а) вращение (110) использующего эффект Магнуса несущего винта вокруг оси использующего эффект Магнуса несущего винта, при этом использующий эффект Магнуса несущий винт имеет замкнутую боковую поверхность для создания силы (112) согласно эффекту Магнуса,
б) вращение (114) несущего винта с поперечным направлением потока вокруг оси вращения, который имеет множество проходящих аксиально лопастей несущего винта, которые выполнены неподвижными относительно тангенциального углового положения,
при этом вращение несущего винта с поперечным направлением потока создает для летательного аппарата силу (116) тяги, которая проходит поперек оси использующего эффект Магнуса несущего винта, и
при этом использующий эффект Магнуса несущий винт расположен внутри несущего винта с поперечным направлением потока, и ось вращения проходит в направлении оси использующего эффект Магнуса несущего винта, и
в) ориентировка (118) корпусного сегмента направляющего устройства, который в направлении контура частично окружает несущий винт с поперечным направлением потока, путем поворота (120) корпусного сегмента относительно оси использующего эффект Магнуса несущего винта таким образом, что посредством несущего винта с поперечным направлением потока на использующем эффект Магнуса несущем винте вызывается поперечный набегающий поток (122), посредством которого создается сила согласно эффекту Магнуса.
12. Способ по п.11, в котором вращение использующего эффект Магнуса несущего винта и вращение несущего винта с поперечным направлением потока, а также поворот направляющего устройства выполнены с возможностью отдельной регулировки таким образом, что являются устанавливаемыми различные силы привода и силы тяги.
| DE 102007009951 B3, 31.07.2008 | |||
| СИСТЕМА ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ПОСРЕДСТВОМ УСКОРЕНИЯ И УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ТЕКУЧЕЙ СРЕДЫ | 1996 |
|
RU2203199C2 |
| ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА | 2004 |
|
RU2272748C2 |
| KR 1020060074339 A, 03.07.2006. | |||

