Настоящее изобретение относится к винтокрылому летательному аппарату с большим радиусом действия и высокой поступательной скоростью на крейсерском режиме полета.
Более конкретно, настоящее изобретение относится к гибридному вертолету, относящемуся к перспективной концепции летательного аппарата вертикального взлета и посадки (VTOL).
Эта перспективная концепция комбинирует при разумной цене эффективность вертикального полета стандартного вертолета и высокоскоростные характеристики перемещения, делаемые возможными, благодаря установке современных газотурбинных двигателей.
Для ясного понимания объекта настоящего изобретения достаточно вспомнить основные летательные аппараты тяжелее воздуха, соответствующие самолетам и винтокрылому летательному аппарату.
Термин «винтокрылый летательный аппарат» используют для обозначения любого транспортного средства, в котором вся или часть его аэродинамической подъемной силы обеспечивается одним или более воздушными винтами по существу вертикальной оси и большого диаметра, называемыми несущими винтами или вращающимися лопастями.
В категории винтокрылого летательного аппарата имеется несколько различных типов.
Во-первых, имеется вертолет, в котором, по меньшей мере, один основной несущий винт, приводимый в движение соответствующей силовой установкой, обеспечивает аэродинамическую подъемную силу и тяговое усилие. Вертолет способен к полету в режиме висения, оставаясь в постоянной точке в трех измерениях, и может обеспечивать вертикальный взлет и посадку, и он может двигаться в любом направлении (вперед, назад, в сторону (боком), вверх, вниз). Огромное большинство винтокрылых летательных аппаратов, производимых в мире, является вертолетами.
В таком случае имеется автожир (впервые полученный Ла Сервалом), который является винтокрылым летательным аппаратом, в котором несущий винт не получает мощности, но вращается в самопроизвольном вращении под действием скорости винтокрылого летательного аппарата. Тяговое усилие обеспечивается газотурбинным двигателем или воздушным винтом, имеющим ось, которая является по существу горизонтальной при полете в направлении вперед и которая приводится в действие посредством стандартного двигателя. Такая конфигурация не способна к вертикальному полету, если несущий винт первоначально не приводится во вращение посредством вспомогательного устройства, дающему возможность побуждения несущего винта вращаться быстрее: по этой причине автожир не способен к выполнению полета в режиме висения, а только к движению вверх или вниз на траекториях полета, имеющих очень крутые наклоны. То есть, так сказать, самолет с широким диапазоном скоростей полета, который не склонен терять скорость, и который может использовать короткие взлетно-посадочные полосы.
Жиродин является винтокрылым летательным аппаратом, промежуточным между вертолетом и автожиром, в котором несущий винт обеспечивает только аэродинамическую подъемную силу. Несущий винт нормально приводится в действие посредством силовой установки во время стадий подъема, полета в режиме висения или вертикального полета, и посадки, подобно вертолету. Жиродин также имеет дополнительную систему обеспечения тягового усилия, которая существенно отличается от узла несущего винта. При полете в направлении вперед несущий винт продолжает обеспечивать аэродинамическую подъемную силу, но только в режиме самопроизвольного вращения, то есть без мощности, передаваемой к указанному несущему винту. Вариантом осуществления этой концепции является винтокрылый летательный аппарат типа Fairey Jet Gyrodyne.
Было изучено несколько других формул, получивших большее или меньшее распространение, и некоторые дали повод для практических вариантов осуществления.
В этом отношении можно упомянуть сложный винтокрылый летательный аппарат, который обеспечивает взлет и посадку подобно вертолету и летит на крейсерском режиме подобно автожиру: его несущий винт, приводимый в самопроизвольное вращение, благодаря скорости винтокрылого летательного аппарата в направлении вперед, обеспечивает некоторую аэродинамическую подъемную силу, причем остальная подъемная сила обеспечивается вспомогательным крылом, при этом тянущий воздушный винт по существу горизонтальной оси генерирует силу, необходимую для движения при поступательном перемещении. Например, можно упомянуть экспериментальный сложный винтокрылый летательный аппарат типа Farfadet SO 1310, имеющий его несущий винт, обеспечивающий его тяговое усилие, благодаря реакции в конфигурации взлет-посадка и вращающийся в режиме самопроизвольного вращения в конфигурации полета на крейсерском режиме, причем в таком случае тяговое усилие обеспечивается посредством воздушного винта. Транспортное средство обеспечено двумя отдельными турбинами для приведения в действие несущего винта и воздушного винта.
Трансформируемый винтокрылый летательный аппарат составляет основу другой особой формулы винтокрылого летательного аппарата. Этот термин охватывает все винтокрылые летательные аппараты, которые изменяют конфигурацию во время полета: взлет и посадка в конфигурации вертолета; а полет на крейсерском режиме в конфигурации самолета, например, с двумя несущими винтами, наклоняемыми (отклоняемыми) на 90 градусов, чтобы действовать в качестве воздушных винтов. Концепция наклоняющегося несущего винта, например, реализована в винтокрылом летательном аппарате типа Bell Boeing V22 Ossprey.
Из этих различных видов винтокрылых летательных аппаратов вертолет является простейшим, и, как результат, он был успешным, несмотря на то что имел максимальную горизонтальную скорость при поступательном перемещении, составляющую 300 км/час, которая является небольшой и меньшей, чем скорость, которая может быть достигнута, благодаря формулам сложного и трансформируемого типа, которые являются технически более сложными и более дорогими.
В таких условиях были предложены усовершенствования вышеприведенных формул для улучшения летно-технических характеристик, но без приведения к решениям, которые являются сложными, трудными для производства и для управления, а следовательно, дорогими.
Таким образом, в патенте GB-895590 описывается летательный аппарат вертикального взлета и посадки, содержащий следующие основные элементы:
фюзеляж и два полукрыла, по одному на каждой стороне фюзеляжа,
горизонтальный стабилизатор и управление рулем направления,
по меньшей мере, четыре взаимосвязанных узла привода,
несущий винт,
по меньшей мере, два реверсивных воздушных винта наклона (летательного аппарата относительно поперечной оси), которые поддаются изменению относительно друг друга, и
средство, находящееся под управлением пилота, предназначенное для передачи приводной мощности непрерывно или время от времени к несущему винту и к воздушным винтам.
В таких обстоятельствах несущий винт вращается посредством силовых установок во время взлета и посадки, во время вертикального полета и для горизонтального полета при низкой скорости. При высокой скорости несущий винт вращается свободно без мощности, подаваемой к нему, подобно автожиру, причем вал несущего винта снабжен расцепляющим средством.
В патенте США №3385537 описывается вертолет, содержащий обычным образом фюзеляж, несущий винт и рулевой винт. Несущий винт вращается посредством первой силовой установки. Это транспортное средство также снабжено двумя другими двигателями, причем каждый двигатель размещен на самом дальнем от центра конце двух полукрыльев, расположенных на каждой стороне указанного фюзеляжа. Патент относится к автоматическому изменению наклона лопастей в функции от ускорения, прикладываемого на транспортном средстве во время маневрирования или во время порывов ветра, например, так, чтобы поддерживать правильное распределение аэродинамической подъемной силы между несущим винтом и полукрыльями. Как результат, соответствующее устройство делает вклад в увеличение горизонтальной скорости винтокрылого летательного аппарата, благодаря уменьшению рисков потери скорости лопастей, являющихся источниками изменений и повреждений механических узлов и конструкций.
В патенте США №6669137 описан летательный аппарат, снабженный вращающимся крылом для работы при очень низкой скорости. При высоких скоростях вращающееся крыло замедляется и затем останавливается, причем аэродинамическая подъемная сила в таком случае создается Х-образным крылом. При максимальных скоростях вращающееся крыло и Х-образное крыло устанавливаются в заданной конфигурации так, чтобы образовывать вид стреловидное крыло.
Винтокрылый летательный аппарат, соответствующий патенту США №7137591, имеет несущий винт, вращаемый посредством силовой установки, в частности, для взлета, посадки и вертикального полета. Тяговый воздушный винт используют при полете на крейсерском режиме. Причем аэродинамическую подъемную силу генерируют посредством самопроизвольного вращения несущего винта, возможно с помощью от вспомогательного крыла. Кроме того, опора несущего винта может немного наклоняться вперед и назад так, чтобы исключать эффекты вследствие изменений в пространственном положении фюзеляжа, которые могут ухудшить летно-технические характеристики винтокрылого летательного аппарата, благодаря увеличению его аэродинамического сопротивления.
В патенте США №6467726 описан винтокрылый летательный аппарат, по меньшей мере, содержащий:
фюзеляж,
два высокорасположенных крыла,
по меньшей мере, четыре тяговых воздушных винта,
по меньшей мере, два несущих винта без управления циклическим шагом, причем каждый соединен с одним из двух крыльев,
два двигателя и соответствующие средства для передачи мощности к несущим винтам и воздушным винтам, и
систему управления общим и циклически шагом для каждого воздушного винта и для каждого несущего винта.
В полете на крейсерском режиме аэродинамическая подъемная сила развивается двумя крыльями, так что аэродинамическая подъемная сила вследствие несущего винта исключается либо посредством расцепления несущего винта через посредство муфты, предусмотренной для этой цели, или посредством адекватной установки общего шага лопастей несущего винта.
Патент США №6513752 относится к винтокрылому летательному аппарату, содержащему
фюзеляж и крыло,
два воздушных винта переменного шага,
несущий винт с «концевыми» массами,
силовую установку, приводящую в действие воздушные винты и несущий винт,
средство управления для регулирования шага воздушных винтов так, чтобы: при полете в направлении вперед тяговое усилие от воздушных винтов прикладывалось к передней части винтокрылого летательного аппарата, и
при полете в режиме висения функция управления рулевым винтом обеспечивается посредством одного воздушного винта, обеспечивающего тяговое усилие к передней части, и другого воздушного винта - к задней части винтокрылого летательного аппарата, причем несущий винт приводится в действие посредством силовой установки,
силовая установка содержит двигатель и муфту, которая благодаря отсоединению несущего винта от двигателя дает возможность несущему винту вращаться быстрее, чем выпуск из указанного двигателя, вследствие вышеупомянутых масс.
Также определяется, что муфта обеспечивает возможность режима самопроизвольного вращения при полете в направлении вперед. Помимо всего прочего, силовая коробка передач, расположенная между силовой установкой и воздушными винтами, дает возможность указанным воздушным винтам работать с множеством скоростей вращения относительно скорости выпуска из указанной силовой установки.
Наконец, уместно процитировать патентную заявку US-2006/0269414 A1, соответствующую известному уровню техники, которая посвящена особой проблеме улучшения летно-технических характеристик вертолета, как во время вертикального полета, так и во время полета на крейсерском режиме. В таком случае высокая скорость вращения несущего винта является желательной в полете на крейсерском режиме, причем указанная скорость вращения может уменьшаться во время увеличения скорости вертолета в направлении вперед.
Следовательно, изобретение, описанное в патентной заявке US-2006/0269414 A1, более точно относится к основной коробке передач, связанной со второй силовой коробкой передач, приводимой в действие посредством силовой установки. Вторая коробка передач включает в себя муфту, которая при сцеплении увлекает основную коробку передач в первую скорость вращения с расцеплением, сообщающим ей вторую скорость вращения, которая меньше первой скорости вращения. Естественно, что основная коробка передач приводит в действие несущий винт (несущие винты).
Тем не менее из вышеприведенных рассмотрений можно видеть, что технические решения, которые склонны улучшать летно-технические характеристики винтокрылого летательного аппарата, основаны по существу на следующих предложениях:
управлении несущего винта при двух разных скоростях вращения, относящихся, во-первых, к вертикальному полету и, во-вторых, к полету на крейсерском режиме, посредством приводной системы с переменными отношениями скоростей между силовой установкой, несущим винтом, воздушным винтом (воздушными винтами) и различными составными элементами приводной системы,
управлении несущим винтом в режиме автожира во время полета на крейсерском режиме: несущий винт вращается без подаваемого приводного усилия и затем обеспечивает некоторую или всю аэродинамическую подъемную силу, но также ведет к сопротивлению, которое, тем не менее, ведет к потере мощности вследствие низкого аэродинамического качества, тогда как в противоположность этому несущий винт вертолета обеспечивает винтокрылому летательному аппарату тяговое усилие в направлении, требуемом пилотом.
В частности, наблюдается, что работа несущего винта в самопроизвольном вращении подобно автожиру во время полета на крейсерском режиме, делает необходимым в принципе отсоединение вала для приводного вращения несущего винта от всей силовой трансмиссионной системы.
Следовательно, это разделение получают посредством, например, муфты, имеющей единственную функцию предотвращения несущего винта от вращения силовой установкой (силовыми установками), и делать это только во время перехода из вертикального полета в полет на крейсерском режиме.
Устройство такого типа, таким образом, сообщает дополнительную массу и стоимость и вызывает проблему в отношении безопасности.
Остановка несущего винта и реконфигурирование его, например, трехлопастной несущий винт, остановленный в особой конфигурации, служит в качестве стреловидного крыла для полета при высокой скорости вперед, или фактически после остановки можно предполагать складывание несущего винта поверх фюзеляжа во время стадии перехода от винтокрылого летательного аппарата к самолету.
Можно понять, что эти решения усложняют техническую реализацию и делают вклад в увеличение массы и, таким образом, в увеличение устанавливаемой мощности последующих расходов, но без того чтобы получать оптимизированное транспортное средство.
Объектом настоящего изобретения является предложение гибридного вертолета, также иногда называемого ниже как «транспортное средство», который делает возможным преодоление вышеупомянутых ограничений.
Гибридный вертолет должен быть способным к эффективному выполнению задач в течение длительных периодов времени вертикального полета и также выполнению полета на крейсерском режиме при высокой скорости, также давая возможность использовать большие радиусы действия.
В этом отношении различные примеры летно-технических характеристик и числовых данных, соответствующие конкретным и иллюстративным применениям, не должны ни в коем случае рассматриваться как ограничительные.
В таких обстоятельствах типовая задача соответствует, например, транспортировке 16 пассажиров при скорости 220 узлов (kt) в транспортном средстве, имеющем массу, составляющую приблизительно 8 метрических тонн (t), для доставки на расстояние 400 морских миль (n.miles), на высоте 1500 метров (m) в условиях международной стандартной атмосферы (ISA), определяющих стандартную атмосферу.
Такие летно-технические характеристики являются высоко исключительными по сравнению с летно-техническими характеристиками стандартного вертолета, например, типа AS 332 MKII, заявителя, даже хотя его летно-технические характеристики уже являются замечательными, в частности, для подобного тоннажа: рекомендуемая крейсерская скорость 141 узел для подобного расстояния и быстрая крейсерская скорость 153 узла.
В соответствии с настоящим изобретением гибридный вертолет с дальним радиусом действия и высокой скоростью движения вперед имеет следующие основные элементы:
авиационную конструкцию, то есть общую конструкцию транспортного средства, содержащую, в частности:
фюзеляж;
поверхность, обеспечивающую аэродинамическую подъемную силу, закрепленную на фюзеляже; и
поверхности для стабилизации и маневрирования, в частности, для тангажа: горизонтальный стабилизатор, по меньшей мере, с одной поверхностью управления по тангажу, подвижной относительно передней части или «горизонтальной плоскости»; и для рулевого управления: по меньшей мере, один соответствующий стабилизатор; и
интегральную приводную систему, образуемую
механической соединительной системой между, во-первых, несущим винтом с управлением общим шагом и циклическим шагом лопастей указанного несущего винта и, во-вторых, по меньшей мере, одним единственно обеспечивающим тяговое усилие воздушным винтом с управлением общим шагом лопастей указанного воздушного винта; и
по меньшей мере, одним газотурбинным двигателем, приводящим в действие механическую соединительную систему;
является замечательным в том отношении, что выходные скорости вращения указанного, по меньшей мере, одного газотурбинного двигателя указанного, по меньшей мере, одного воздушного винта, указанного несущего винта и указанной механической соединительной системы являются взаимно пропорциональными, причем коэффициент пропорциональности является постоянным независимо от конфигурации полета гибридного вертолета в нормальном режиме работы интегральной приводной системы.
Таким образом, понятно, что в том случае, если гибридный вертолет имеет только один газотурбинный двигатель, то он вращает несущий винт и воздушный винт (воздушные винты) через посредство механической соединительной системы. Если гибридный вертолет снабжен двумя или более газотурбинными двигателями, то несущий винт и воздушный винт (воздушные винты) в таком случае приводятся в действие через посредство механической соединительной системы указанными газотурбинными двигателями.
Другими словами, силовая трансмиссионная система (система передачи мощности) работает без какого-либо изменяемого коэффициента вращения между газотурбинным двигателем (газотурбинными двигателями), воздушным винтом (воздушными винтами), несущим винтом и механической соединительной системой.
Следовательно, и предпочтительно, несущий винт всегда приводится во вращение посредством газотурбинного двигателя (газотурбинных двигателей) и всегда развивает аэродинамическую подъемную силу при любой конфигурации транспортного средства.
Более точно, несущий винт предназначен для обеспечения всей аэродинамической подъемной силы гибридного вертолета во время этапов взлета, посадки и вертикального полета, а затем обеспечивает часть аэродинамической подъемной силы во время полета на крейсерском режиме, причем в таком случае крыло участвует в поддерживании указанного гибридного вертолета.
Кроме того, и как более подробно описано ниже, важно наблюдать, что способность гибридного вертолета достигать высоких скоростей в направлении вперед делает необходимым уменьшение скорости воздушного потока на вершинах поступательно движущихся лопастей несущего винта для предотвращения любого риска явления сжимаемости в указанном воздушном потоке. Другими словами, необходимо уменьшение скорости вращения указанного несущего винта без увеличения его среднего коэффициента подъемной силы, таким образом, приводя к уменьшению в аэродинамической подъемной силе, обеспечиваемой посредством несущего винта.
Таким образом, несущий винт сообщает часть аэродинамической силы гибридному вертолету в полете на крейсерском режиме, возможно также с небольшим вкладом в движение вперед, или тяговые усилия (действуя как вертолет) или без какого-либо вклада в лобовое сопротивление (действуя как автожир). Эти условия работы, таким образом, ведут к меньшей мощности, подаваемой с целью предоставления возможности несущему винту обеспечения тяги. Необходимо видеть, что небольшой вклад в тяговые усилия делается диском несущего винта, наклоняемым к передней части транспортного средства только на небольшую величину. Этот процесс ухудшает аэродинамическое качество несущего винта очень немного, так что он, следовательно, более предпочтителен, исходя из баланса мощностей, чем дополнительное требование тяги, передаваемой посредством воздушного винта (воздушными винтами).
Для осуществления этого в полете на крейсерском режиме крыло обеспечивает требуемую дополнительную аэродинамическую подъемную силу.
Крыло предпочтительно состоит из двух полукрыльев, расположенных на каждой стороне фюзеляжа. Эти полукрылья могут составлять высокорасположенное крыло, в случае которого они предпочтительно представляют отрицательный двугранный угол. Тем не менее они могут также составлять либо низкорасположенное крыло, предпочтительно имеющее положительный двугранный угол, или фактически промежуточное крыло любого двугранного угла. Форма этих полукрыльев на виде сверху может соответствовать, в зависимости от разновидности, полукрыльям, которые являются прямоугольными, трапециевидными, с обратной стреловидностью, стреловидными и так далее. Размах всего крыла предпочтительно лежит в диапазоне 7-9 метров для транспортно средства, имеющего санкционированную взлетную массу, составляющую приблизительно 8 тонн.
В предпочтительной версии общий размах крыла по существу равен радиусу несущего винта, то есть, по существу равен 8 метров, причем хорда крыла установлена равной 1,50 м, то есть, давая относительное удлинение (крыла) приблизительно 5,30.
В варианте осуществления настоящего изобретения крыло снабжено элеронами.
Гибридный вертолет предпочтительно снабжен двумя движущими воздушными винтами, расположенными на каждой стороне фюзеляжа, предпочтительно на концах двух полукрыльев. Для обеспечения для транспортного средства требуемых летно-технических характеристик каждый воздушный винт имеет диаметр, возможно, но не обязательно, лежащий в диапазоне 2,5-4,5 м, причем диаметр воздушных винтов составляет 2,6 м в конкретной версии, которая изучалась, как описано ниже.
Естественно, поскольку несущий винт всегда приводится в действие механически посредством газотурбинного двигателя (газотурбинных двигателей), несущий винт генерирует «противоположный крутящий момент несущего винта», склонный заставлять фюзеляж поворачиваться в противоположном направлении (вращения) ротора. Обычно, производители устанавливают рулевой винт (для гашения момента от несущего винта) на задней стороне фюзеляжа для компенсации крутящего момента несущего винта. Этот рулевой винт в стандартном вертолете размещен за фюзеляжем на расстоянии, составляющем приблизительно 1,5 радиуса несущего винта для предотвращения какого-либо механического взаимодействия между ними. Такой винт, обычно, требует приблизительно 12% мощности несущего винта в вертикальном полете. Помимо всего прочего, тяга от указанного винта также используется для рулевого управления вертолетом.
Гибридный вертолет, соответствующий настоящему изобретению, предпочтительно не имеет рулевого винта для упрощения его механических узлов и для уменьшения и стоимости транспортного средства, соответственно.
В таких случаях гибридный вертолет оборудуют, по меньшей мере, двумя воздушными винтами, устанавливаемыми на соответствующих полукрыльях на каждой стороне фюзеляжа, причем функции гашения момента (от несущего винта) и рулевого управления выполняют путем побуждения воздушных винтов обеспечивать различную тягу.
Можно видеть, что воздушные винты могут быть размещены по существу в совмещении относительно хордовой плоскости крыльев или полукрыльев, или они могут быть смещены выше или ниже крыльев или полукрыльев с которыми они соединены посредством несущей опоры.
Другими словами, в вертикальном полете воздушный винт на левой стороне фюзеляжа создает тягу по направлению к задней стороне транспортного средства (или «обратную тягу»), тогда как воздушный винт на правой стороне создает тягу по направлению к передней стороне (или «прямую тягу»), допуская, что несущий винт вращается в направлении против движения часовой стрелки, если смотреть сверху.
Однако размах крыла предпочтительно того же порядка величины, что и радиус несущего винта, то есть как можно более мал вследствие высокого аэродинамического качества несущего винта в полете на крейсерском режиме, как объяснено ниже. Как результат, расстояние между двумя воздушными винтами также одного порядка величины, что и радиус несущего винта. В таких обстоятельствах тяга от воздушных винтов необходима больше, чем от рулевого винта.
Помимо всего прочего, и на основе геометрических данных, приведенных выше в качестве примера, диаметр воздушных винтов должен быть уменьшен от 3,0 м для стандартного вертолета до приблизительно 2,6 м для гибридного вертолета, чтобы обеспечить достаточный промежуток между указанным винтом и указанными воздушными винтами, дополнительно увеличивая в соответствии с этим мощность, необходимую для функции гашения момента от несущего винта.
В любом случае, эта проблема в отношении мощности просто компенсируется большим запасом мощности в вертикальном полете (смотри ниже) и экономией в массе и стоимости из аннулирования рулевого винта и соответствующей системы передачи мощности, как представлено горизонтальным и наклонным валами передачи мощности и коробками передач, известными как «промежуточная» и «задняя» коробки передач.
В варианте осуществления функция гашения момента от несущего винта может также быть выполнена так, чтобы, в выше приведенном примере, правый воздушный винт развивал двойную тягу, тогда как левый воздушный винт не обеспечивал какой-либо тяги, причем очевидно, что при таком действии циклического шага несущий винт должен в таком случае наклоняться к задней стороне транспортного средства, чтобы балансировать (уравновешивать) тягу от правого воздушного винта. В таких обстоятельствах может быть показано, что требуемая мощность больше, чем необходима, когда два воздушных винта создают тягу в противоположных направлениях.
Естественно, будет очевидно, что промежуточное решение могло соответствовать функции гашения момента от несущего винта, выполняемое путем комбинирования двух вышеуказанных концепций (чисто дифференциальной тяги и двойной тяги без тяги).
Другое преимущество настоящего изобретения вытекает из того факта, что скорость вращения несущего винта равна первой скорости вращения Ω1 до первой скорости V1 полета траектории полета указанного гибридного вертолета, и затем постепенно линейно уменьшается в функции скорости транспортного средства в направлении вперед. Если скорость вращения несущего винта радиуса R гибридного вертолета, перемещающегося со скоростью V полета траектории полета, равна Ω, то результирующая скорость воздуха на конце движущейся поступательно лопасти составляет V+U на вершине лопасти, имеющем скорость U, равную ΩR. В таком случае наклон указанной линейной зависимости предпочтительно равен (-1/R) в системе координат, в которой скорость V откладывается по оси абсцисс, а скорость Ω - по оси ординат. Число Маха на вершине движущейся поступательно лопасти в таком случае остается постоянным.
На практике скорость вращения несущего винта постепенно уменьшается до второй скорости вращения Ω2, соответствующей второй скорости V2 полета траектории полета, которая является максимальной скоростью гибридного вертолета.
Тем не менее будет очевидно, что гибридный вертолет может находиться в полете на крейсерском режиме при скорости полета траектории полета, которая является произвольной, обеспечивая ее менее или равной максимальной скорости полета траектории полета, так что скорость вращения Ω несущего винта равна ее первой скорости вращения ниже скорости V1 и в таком случае определяется вышеуказанной линейной зависимостью между скоростью V1 и второй скоростью полета траектории полета или максимальной скоростью V2.
Следовательно, этот процесс делает возможным, в частности, поддерживать число Маха на поступательно движущихся внешних концах лопастей несущего винта при величине, которая не больше 0,85, на которую делается ссылка как на максимальное число Маха. Это значение устанавливается так, чтобы оставаться всегда ниже числа Маха дивергенции сопротивления, при котором сопротивление несущего винта значительно увеличивается, отрицательно влияя в соответствии с этим на аэродинамическое качество транспортного средства и, следовательно, на его летно-технические характеристики, генерируя в соответствии с этим вибрацию, которая является проблемой в отношении комфорта, безопасности и срока службы компонентов указанного транспортного средства.
Скорость вращения несущего винта винтокрылого летательного аппарата кондиционируют посредством диаметра несущего винта, поскольку скорость на вершине лопасти ограничивается специалистом, квалифицированным в этой области техники, до скорости, лежащей в диапазоне 200-250 м/с для предотвращения ухудшения аэродинамических характеристик указанного несущего винта.
Скорость полета вершины «поступательно движущейся» лопасти равна скорости полета вследствие скорости в направлении вперед винтокрылого летательного аппарата плюс скорость полета U вследствие вращения несущего винта.
Следовательно, и при данной скорости вращения несущего винта, любое увеличение в скорости в направлении вперед винтокрылого летательного аппарата ведет к пропорциональному увеличению числа Маха, равного скорости на вершине лопасти, деленной на скорость звука. Как указано выше, достаточно поддерживать число Маха меньшим или равным числу Маха дивергенции сопротивления для профиля вершины, соответствующему появлению эффектов сжимаемости в воздушном потоке на вершине лопасти, ведущих к вышеупомянутым проблемам.
В качестве примера и на основе, во-первых, максимального числа Маха, установленного равным 0,85, и, во-вторых, скорости 220 м/с на вершине лопасти вследствие вращения несущего винта, имеющего диаметр 16 в полете в режиме висения, установлено, что число Маха перемещающейся лопасти достигает величины 0,95, когда винтокрылый летательный аппарат поступательно движется со скоростью, равной 125 узлов, и на высоте 1500 м, при температурных условиях международной стандартной атмосферы, то есть при температуре 5°C.
Таким образом, очевидно, что поскольку намеченная максимальная скорость поступательного движения намного выше этого значения, например, 220 узлов, то важно исправить любое увеличение числа Маха выше 0,85.
В соответствии с настоящим изобретением, таким образом, предлагается приблизительно от скорости 125 узлов постепенно уменьшать скорость вращения несущего винта от первой скорости вращения Ω1 указанного несущего винта до его второй скорости вращения Ω2, для ограничения скорости у вершины поступательно движущейся лопасти, например, до 171 м/с при скорости полета траектории полета, составляющей 220 узлов, так, чтобы поддерживать число Маха на вершине поступательно движущейся лопасти при значении 0,85.
Естественно, что это уменьшение скорости вращения несущего винта сопровождается падением аэродинамической подъемной силы указанного несущего винта. Следовательно, крыло компенсирует это падение аэродинамической подъемной силы так, чтобы делать вклад 31% в аэродинамическую подъемную силу при скорости 220 узлов, как упоминалось выше в контексте конкретного применения.
Также должно быть очевидно, что крыло генерирует аэродинамическую подъемную силу независимо от скорости винтокрылого летательного аппарата в направлении вперед, за исключением нахождения в режиме висения, в случае которого оно представляет особый эффект «отрицательной подъемной силы», связанный с аэродинамическим взаимодействием между несущим винтом и указанным крылом.
Следовательно, аэродинамическую подъемную силу от несущего винта в полете на крейсерском режиме предпочтительно регулируют с помощью соответствующего предпочтительно автоматического устройства для регулирования общего шага во время работы со скоростью вращения несущего винта, используя ссылочный диапазон значений для указанной скорости вращения несущего винта.
В таком режиме и для конкретной изучаемой версии, скорость вращения Ω несущего винта равна первой скорости вращения Ω1, составляющей приблизительно 260 оборотов в минуту, до первой скорости в направлении вперед, более корректно называемой первой скоростью V1 полета траектории полета, составляющей 125 узлов. Выше этой скорости и до второй скорости полета траектории полета, составляющей 220 узлов, скорость вращения несущего винта постепенно уменьшается до второй скорости вращения Ω2, составляющей приблизительно 205 оборотов в минуту.
Таким образом, предпочтительно используют следующие значения:
первая скорость вращения Ω1 несущего винта: 263 оборота в минуту;
вторая скорость вращения Ω2 несущего винта: 205 оборотов в минуту;
первая скорость полета V1 траектории полета: 125 узлов; и
вторая скорость полета V2 траектории полета: 220 узлов.
Это предпочтительное решение соответствует максимальному аэродинамическому качеству несущего винта приблизительно 12,2 в диапазоне 150-220 узлов, причем аэродинамическое качество несущего винта, взятое вместе с крылом, превышает 12 выше 150 узлов.
Следовательно, гарантируется, что число Маха у вершин поступательно движущихся лопастей меньше 0,85 до первой скорости полета траектории полета и затем поддерживается постоянным и равным 0,85 между первой и второй скоростями полета траектории полета.
Вполне очевидно, что вследствие постоянной пропорциональности между скоростями вращения различных компонентов, составляющих интегральную приводную систему, то есть газотурбинный двигатель (газотурбинные двигатели), воздушный винт (воздушные винты), несущий винт и механическая соединительная система, подобно работают при соответствующих первых скоростях вращения и при соответствующих вторых скоростях вращения. Другими словами, первая и вторая скорости вращения ограничены относительно, соответственно, до первой и второй скоростей полета траектории полета, и они являются применимыми к газотурбинному двигателю (газотурбинным двигателям), воздушному винту (воздушным винтам) и к механической соединительной системе. Должно быть очевидно, что эти вторые скорости вращения соответствуют 78% первых скоростей вращения (номинальные скорости: 100% первых скоростей вращения) в применении, описанном выше.
Естественно, скорости вращения газотурбинного двигателя (газотурбинных двигателей), воздушного винта (воздушных винтов) и механической соединительной системы постепенно уменьшаются между их соответствующими первыми и вторыми скоростями вращения для соответствия с изменением в скорости вращения несущего винта между его первой и второй скоростями вращения в применении зависимости, которая является линейной или по существу линейной.
В этом контексте необходимо вспомнить, что нет обстоятельств какого-либо использования переменных отношений в скоростях вращения между силовой установкой, несущим винтом, воздушным винтом (воздушными винтами) и различными компонентами интегральной приводной системы.
Естественно, общий шаг и циклический шаг лопастей несущего винта адаптируется для согласования изменяющейся скорости вращения несущего винта как функции скорости полета траектории полета транспортного средства.
Аналогичным образом, общий шаг воздушных винтов регулируется автоматически для передачи необходимого тягового усилия.
Во время полета на крейсерском режиме другое преимущество настоящего изобретения заключается в регулировании продольного циклического шага несущего винта так, чтобы поддерживать пространственное положение фюзеляжа при угле тангажа (или угле продольной балансировки), который равен наклону траектории полета, так, чтобы уменьшать угол атаки фюзеляжа относительно воздуха до нуля, минимизируя в соответствии с этим аэродинамическое сопротивление указанного фюзеляжа. Следовательно, и во время горизонтального полета на крейсерском режиме продольная балансировка гибридного вертолета поддерживается при величине нуля. Кроме того, и предпочтительно, опрокидывающий момент фюзеляжа также регулируется благодаря работе, по меньшей мере, одной движущейся поверхности управления шагом, подгоняемой к горизонтальному стабилизатору, например, посредством электрического привода, так, чтобы компенсировать любое смещение центра силы тяжести указанного гибридного вертолета: эту регулировку теоретически получают, когда изгибающий момент, прикладываемый к опоре несущего винта относительно оси тангажа и измеряемый, например, посредством тензодатчиков, уменьшается до нуля.
Предпочтительно быть способным регулировать или даже уменьшать до нуля опрокидывающий момент фюзеляжа, поскольку, во-первых, это непосредственно действует на изгибающий момент в опоре несущего винта и, таким образом, на усталостное напряжение, которым оно подвергается, и, во-вторых, это ведет к общему балансу транспортного средства в результате распределения мощности между воздушными винтами и несущим винтом. Это распределение оказывает влияние на общий баланс мощности, поскольку воздушные винты и несущие винты имеют соответствующие разные коэффициенты полезного действия.
Во время этой операции распределение мощности между несущим винтом и воздушными винтами может значительно изменяться как функция угла наклона диска несущего винта вследствие его вклада в изменения в общем аэродинамическом сопротивлении и в тяге транспортного средства. Например, мощность, необходимая в высокоскоростном полете на крейсерском режиме, соответствует, главным образом, паразитному сопротивлению транспортного средства. При скорости 140 узлов, паразитное сопротивление представляет приблизительно 50% всех требований мощности и может достигать 75% при скорости 220 узлов, то есть для подъемной силы требуется в три раза больше мощности. Коэффициент полезного действия при высокой скорости, таким образом, зависит от минимизации паразитного сопротивления.
Гибридный вертолет имеет также признак новизны в том отношении, что он имеет первые средства для регулирования, факультативно автоматически, угла, при котором указанная, по меньшей мере, одна поверхность управления шагом устанавливается как функция изгибающего момента, прикладываемого к опоре несущего винта относительно оси тангажа указанного гибридного вертолета, и вторые средства для регулирования циклического шага лопастей указанного несущего винта так, чтобы регулировать продольную балансировку гибридного вертолета как функции условий полета.
Вполне очевидно, что такое регулирование делается возможным благодаря двум степеням свободы, обеспечиваемым путем изменения, по меньшей мере, одной поверхности управления шагом и, во-вторых, путем регулирования циклического шага лопастей несущего винта, причем эти первые и вторые средства являются независимыми друг от друга.
На практике поверхность управления шагом может быть отрегулирована вручную в упрощенной версии. В таком случае необходимо обеспечить панель управления с индикатором изгибающего момента, прикладываемого к опоре несущего винта, с тем, чтобы давать возможность пилоту поддерживать его в заданном диапазоне путем ручного воздействия на указанную подвижную поверхность управления шагом, или фактически на электрический привод.
Когда поверхность управления шагом управляется автоматически в улучшенной версии, указанные первые средства реагируют путем автоматического регулирования угла, при котором указанная, по меньшей мере, одна поверхность управления шагом, устанавливается через посредство электрического привода, например, регулируя в соответствии с этим опрокидывающий момент указанного гибридного вертолета до указанного первого установочного значения, которое предпочтительно равно нулю.
Эти первые средства содержат компьютер, которые контролирует электрический привод, поворачивающий указанную, по меньшей мере, одну поверхность управления шагом на угол, который адаптирует опрокидывающий момент гибридного вертолета до указанного первого установочного значения.
Чтобы делать это, указанный компьютер определяет изгибающий момент, прикладываемый к опоре несущего винта относительно оси тангажа, как логически выведенный из информации, переданной тензодатчиками, причем указанный компьютер прекращает двигать указанную поверхность управления шагом, если изгибающий момент, прикладываемый к опоре несущего винта, лежит в заданном диапазоне, соответствующем по существу первому опорному значения, предпочтительно равному нулю, для момента тангажа указанного гибридного вертолета.
Другими словами, термин «первое установочное значение момента тангажа» может определять одинаково хорошо специальное значение или узкий диапазон значений указанного момента тангажа, в частности, вследствие зависимости изгибающего момента, прикладываемого к опоре несущего винта, относительно момента тангажа гибридного вертолета.
Помимо всего, поскольку момент тангажа регулируется и предпочтительно уменьшается до нуля, также адекватно регулировать продольную балансировку гибридного вертолета и, в частности, уменьшать ее до нуля с целью минимизации паразитного сопротивления. Таким образом, вторые средства адаптируют указанную продольную балансировку ко второму установочному значению, предпочтительно равному нулю. Эти вторые средства содержат, по меньшей мере, ручку управления циклическим шагом, которая регулирует циклический шаг, в частности, продольный циклический шаг лопастей несущего винта, через посредство тарелки автомата перекоса (несущего винта) и шаговых рычагов.
Естественно, нужно вспомнить, что боковой циклический шаг также вовлекается для обеспечения возможности транспортному средству выполнять маневры отклонения от курса с изменениями в общем шаге лопастей несущего винта, служащими только для изменения аэродинамической подъемной силы каждой лопасти на одну величину.
Естественно, стабилизатор для обеспечения регулирования отклонения гибридного вертолета от курса может предпочтительно содержаться в передней области неподвижной части или хвостового оперения и в задней области движущейся части или руля направления. Очевидно, что транспортное средство может быть оборудовано множеством стабилизаторов относительно вертикали, причем каждый предусмотрен с рулем направления.
Эти различные функции, описанные выше, делаются возможными благодаря механической соединительной системе, пригодной для передачи мощности. Такая система должна быть способной к передаче высоких уровней крутящего момента, в частности, вследствие высокого уровня поглощаемой (потребляемой) мощности и относительно низкой скорости вращения несущего винта. Это требует больших передаточных отношений в скорости вращения между различными компонентами приводной системы, сохраняя как можно меньшую массу и гарантируя хорошую долговечность и хорошую общую безопасность.
На практике механическая соединительная система содержит следующие основные компоненты:
первую основную коробку передач, расположенную в фюзеляже для приведения в действие несущего винта со скоростью, составляющей 263 оборота в минуту при номинальной скорости вращения (100% первой скорости вращения несущего винта), или с первой скоростью вращения несущего винта;
две вторичных коробки передач для приведения в действие воздушных винтов, причем одна коробка передач приводит в действие каждый воздушный винт при номинальной скорости вращения, составляющей 2000 оборотов в минуту, или первой скорости вращения каждого воздушного винта;
первый вал, приводимый в действие первой коробкой передач для приведения в действие несущего винта;
два вторичных вала, причем каждый расположен в соответствующем полукрыле, по существу на одной четвертой его хорды, и передает мощность к несущему винту и к воздушным винтам, причем скорость вращения этих валов также составляет 3000 оборотов в минуту при номинальной скорости вращения или первой скорости вращения вторичных валов; и
оба вторичных вала приводятся в действие одним или более газотурбинными двигателями посредством одного или более соответствующих модулей (редукторов), которые, в зависимости от типа газотурбинного двигателя, уменьшают скорость газотурбинного двигателя от 21000 оборотов в минуту или от 6000 оборотов в минуту до 3000 оборотов в минуту для первой скорости вращения указанных валов.
Эта архитектура остается эффективной (правомерной) для газотурбинных двигателей, смонтированы ли они на фюзеляже или на полукрыльях. При монтаже на полукрыльях, каждый редуктор внедрен во вторичные коробки передач для соответствующего воздушного винта вместо размещения на каждой стороне первой основной коробки передач.
В базовой версии первая основная коробка передач имеет две ступени, в частности:
спиральнозубое коническое зубчатое кольцо, приводимое в действие двумя спиральнозубыми коническими шестернями, причем каждая соединена с одним из указанных вторичных валов; и
указанное кольцо действует при первой скорости вращения установки для приведения в действие центральной шестерни со скоростью 1000 оборотов в минуту эпициклической ступени так, чтобы вращать несущий винт через посредство планетарных шестерен, вращающихся на стационарном (неподвижном) внешнем кольце.
Два связанных редуктора содержат одну или две ступени редукции в зависимости от выходных скоростей вращения газотурбинного двигателя. В общем, одной ступени достаточно для выходной скорости газотурбинного двигателя, составляющей 6000 оборотов в минуту, тогда как две ступени необходимы для выходной скорости 21000 оборотов в минуту.
Кроме того, две вторичные коробки передач снабжены соответствующими ступенями редуцирования (понижения) скорости, поскольку первая скорость вращения воздушных винтов (номинальная скорость вращения) составляет приолизительно 2000 оборотов в минуту.
Естественно, число газотурбинных двигателей не ограничивается.
Настоящее изобретение и его преимущества становятся более очевидными из контекста описания, приведенного ниже, вариантов осуществления, приведенных для иллюстрации, сделанного со ссылкой на сопроводительные чертежи, где
Фиг.1 - схематическое изометрическое изображение варианта осуществления гибридного вертолета, соответствующего настоящему изобретению;
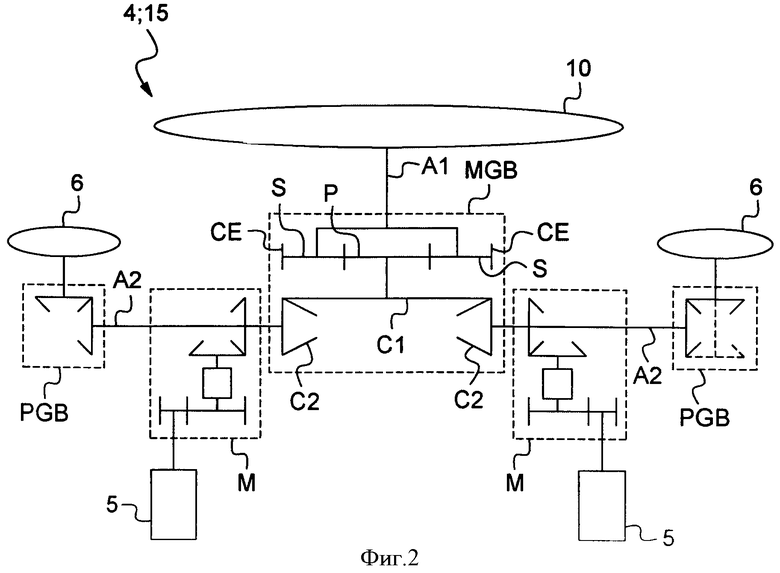
Фиг.2 - принципиальная схема приводной системы;
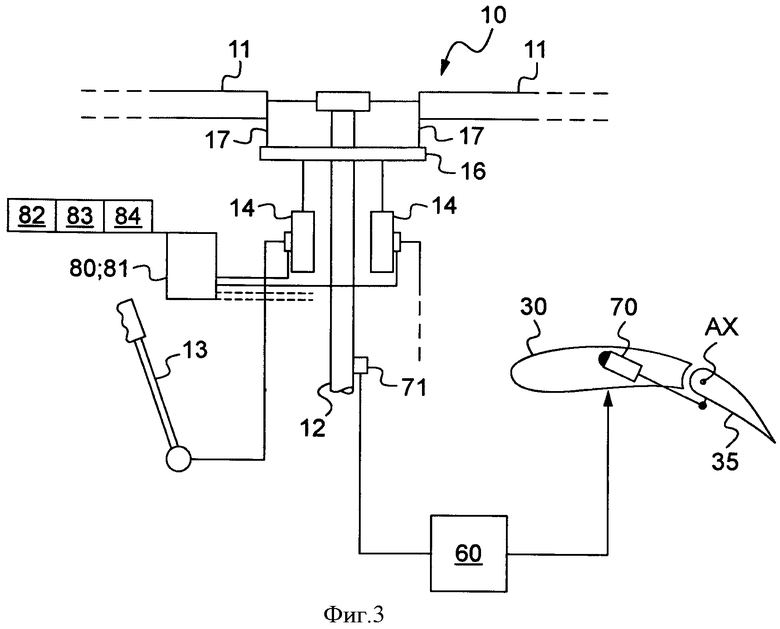
Фиг.3 - схема устройства для регулировки продольной балансировки гибридного вертолета;
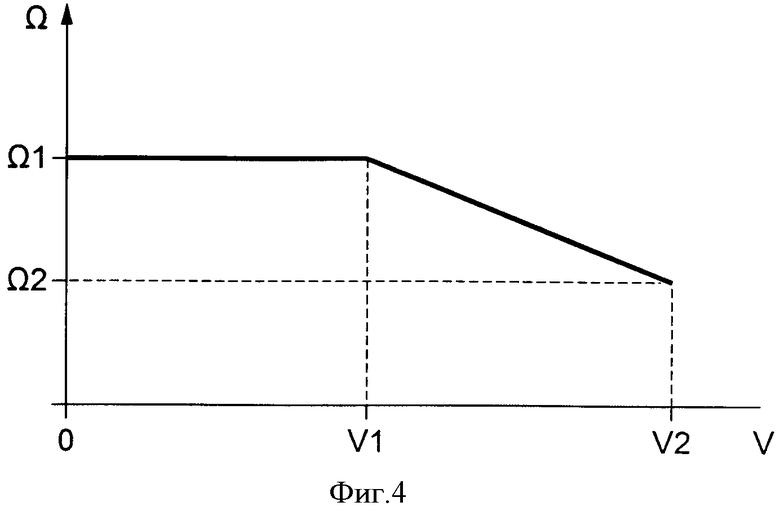
Фиг.4 - схема, иллюстрирующая зависимость изменения скорости вращения несущего винта как функции скорости движения гибридного вертолета в направлении вперед. Элементы, представленные на двух или более разных чертежах, даны с подобной ссылкой на каждом из них.
На фиг.1 иллюстрируется гибридный вертолет 1, полученный в соответствии с настоящим изобретением.
В обычном случае гибридный вертолет 1 содержит фюзеляж 2 с кабиной (экипажа) 7 в его передней части, несущий винт 10 для приведения лопастей 11 во вращение посредством, во-первых, двух газотурбинных двигателей 5, размещенных на верхней стороне фюзеляжа 2 (не видимых на фиг.1 вследствие наличия обтекателя), на каждой стороне продольной плоскости симметрии винтокрылого летательного аппарата, и, во-вторых, основной первичной коробки передач MGB (не показанной на фиг.1).
Кроме того, гибридный вертолет 1 предусмотрен с высокорасположенным крылом 3, образованным из двух полукрыльев 8, расположенных на верхней части фюзеляжа 2, причем эти полукрылья 8 являются прямоугольными на виде сверху и имеют отрицательный двугранный угол.
Гибридный вертолет 1 толкается вперед двумя воздушными винтами 6, приводимыми в действие двумя газотурбинными двигателями 5, причем по одному из воздушных винтов 6 размещено на каждом из внешних концов крыла 3.
Кроме того, в окрестности заднего конца фюзеляжа 2 предусмотрены поверхности для стабилизации и маневрирования, то есть для управления шагом горизонтальный стабилизатор 30, имеющий две поверхности 35, которые являются подвижными относительно передней части 34, и для рулевого управления двумя соответствующими стабилизаторами 40, причем каждый расположен на соответствующем конце горизонтального стабилизатора 30.
В частности, горизонтальный стабилизатор 40 и вертикальные стабилизаторы 50 образуют U-образную конфигурацию, которая поворачивается вверх-вниз по направлению к фюзеляжу 2.
Стабилизаторы 40, которые являются вертикальными или наклонными относительно вертикали, предпочтительно могут быть образованы соответствующими недвижущимися передними частями (или хвостовым оперением) 44 и движущимися задними частями или рулями 45 направления для контролирования отклонения от курса (рыскания).
С размерной точки зрения гибридный вертолет 1 теперь соответствует следующим характеристикам, относящимся к винтокрылому летательному аппарату максимальной массой приблизительно 8 т, санкционированной для взлета:
диаметр D несущего винта: приблизительно 16 м;
диаметр d воздушного винта: 2,6 м;
размах L крыла: 8 м; и
относительное удлинение λ крыла: 5,3.
Помимо всего прочего, гибридный вертолет 1 снабжен интегральной приводной системой 4, которая содержит не только два газотурбинных двигателя 5, несущий винт 10 и два воздушных винта 6, но также механическую соединительную систему 15 между этими элементами, как схематически показано на фиг.2, которая является упрощенным представлением, в котором очевидно, что несущий винт 10 и воздушные винты 6 вращаются в плоскостях, которые являются по существу ортогональными, а не параллельными.
При такой конфигурации гибридный вертолет 1 замечателен в том отношении, что скорости вращения выходов газотурбинных двигателей, воздушных винтов, несущего винта и механической соединительной системы являются взаимно пропорциональными, причем коэффициент пропорциональности является постоянным при нормальных условиях работы интегральной приводной системы, независимо от конфигурации полета гибридного вертолета.
Естественно, специальные устройства, лежащие вне объема настоящего изобретения, активируются в случае возможных механических разрушений.
Как следует из фиг.2, механическая соединительная система содержит следующие основные компоненты:
первую основную коробку передач MGB, расположенную в фюзеляже 2 и приводящую в действие несущий винт 10 со скоростью, составляющей 263 оборота в минуту при номинальной скорости вращения (или первой скорости вращения несущего винта), или с первой скоростью вращения несущего винта;
две вторичные коробки передач PGB, причем каждая из коробок передач PGB приводит в действие один из воздушных винтов 6 со скоростью 2000 оборотов в минуту при номинальной скорости вращения;
первый вал А1, вращаемый посредством первой коробки передач MGB для приведения в действие несущего винта 10;
два вторичных вала А2, причем каждый расположен в соответствующем одном из полукрыльев 8, по существу на одной четвертой его хорды, и передает мощность к несущему винту и к воздушным винтам 6, причем скорость вращения этих валов также составляет 3000 оборотов в минуту при номинальной скорости вращения или первой скорости вращения вторичных валов;
два вторичных вала А2 приводятся во вращение двумя газотурбинными двигателями 5 через посредство двух соответствующих модулей М, которые, в зависимости от типа газотурбинного двигателя, уменьшают скорости газотурбинных двигателей 5 от 21000 оборотов в минуту или от 6000 оборотов в минуту до 3000 оборотов в минуту для первой скорости вращения указанных валов.
В базовой версии первая или основная коробка передач MGB имеет две ступени, в частности:
спиральнозубое коническое зубчатое кольцо С1, приводимое в действие двумя спиральнозубыми коническими шестернями, причем каждая соединена с одним из указанных вторичных валов А2; и
указанное кольцо С1 действует при первой скорости вращения установки для приведения в действие центральной шестерни Р со скоростью 1000 оборотов в минуту эпициклической ступени так, чтобы приводить во вращение несущий винт через посредство планетарных шестерен S, вращающихся на стационарном (неподвижном) внешнем кольце СЕ.
Различные вышеупомянутые диспозиции дают гибридному вертолету 1 следующие другие характеристики:
аэродинамическое качество несущего винта: приблизительно 12,2 для скорости полета траектории полета более 150 узлов;
аэродинамическое качество F несущего винта и крыла вместе: приблизительно 12 для скорости полета траектории полета более 150 узлов;
максимальном скорость транспортного средства: 250 узлов, и
аэродинамическая подъемная сила несущего винта: в 1,05 раз больше массы вертолета в вертикальном полете и лежит в диапазоне 0,6-0,9 раз указанной массы при максимальной скорости полета траектории полета, причем несущий винт 10 приводится в действие непрерывно посредством газотурбинного двигателя 5, при этом поглощение (потребление) мощности в полете на крейсерском режиме уменьшается до приблизительно 500 кВт.
Должно быть очевидным, что отношение аэродинамической подъемной силы несущего винта 10 к массе гибридного вертолета 1 предпочтительно принимает последовательно следующие промежуточные значения:
0,98 при скорости 50 узлов;
0,96 при скорости 80 узлов;
0,90 при скорости 125 узлов;
0,85 при скорости 150 узлов; и
0,74 при скорости 200 узлов.
Помимо всего прочего, гибридный вертолет 1 является таковым, что общий шаг и циклический шаг лопастей 11 несущего винта 10 регулируются и адаптируются как функция режима полета.
Что касается воздушных винтов 6, то только общий шаг регулируется и адаптируется как функция режима полета.
Кроме того, гибридный вертолет 1 отрегулирован для высокоскоростного полета на крейсерском режиме, так что несущий винт 10 создает аэродинамическую подъемную силу возможно с небольшим вкладом в тяговые усилия, но без какого-либо вклада в аэродинамическое сопротивление. Естественно, требуется мощность, потребляемая указанным несущим винтом 10, для балансировки крутящего момента, генерируемого профильным сопротивлением и индуктивным сопротивлением лопастей 11 несущего винта, но эта мощность относительно мала, то есть составляет приблизительно 500 кВт, как указано выше, вследствие аэродинамического качества f несущего винта, которое составляет приблизительно 12,2 при скорости выше 150 узлов.
Небольшой вклад в тяговые усилия имеет место вследствие диска несущего винта, наклоненного немного к передней части винтокрылого летательного аппарата, решение которого может быть более благоприятно на основе баланса мощностей, чем дополнительная тяга от воздушных винтов, поскольку аэродинамическое качество несущего винта является относительно нечувствительным к небольшим изменениям в балансировке гибридного вертолета.
Кроме того, предпочтительно быть способным регулировать момент тангажа фюзеляжа, поскольку, во-первых, он действует непосредственно на изгибающий момент в опоре несущего винта и, таким образом, на ее усталостное напряжение и, во-вторых, дает повышение общего баланса винтокрылого летательного аппарата как результат способа распределения мощности между воздушными винтами и несущим винтом. Это распределение имеет влияние на общий баланс мощности, поскольку воздушные винты и несущий винт имеют разные соответствующие коэффициенты полезного действия.
Как результат и как показано на фиг.3, предпочтительно автоматическое маневрирование, по меньшей мере, одной подвижной поверхности 35 управления шагом, установленной на горизонтальном стабилизаторе 30, приводимой в действие от электрического двигателя 70, делает возможным регулирование или даже исключение какого-либо момента тангажа, который может в результате генерироваться из центра силы тяжести, становящегося смещенным относительно линии действия аэродинамической подъемной силы указанного гибридного вертолета: эту регулировку получают, когда изгибающий момент опоры 12 несущего винта относительно оси тангажа, измеряемый посредством тензодатчиков 71, например, уменьшается до нуля (к нулю). В общем, эта регулировка является относительно медленной, так что такой привод часто называют приводом балансировки.
Помимо всего прочего и независимо, продольный циклический шаг несущего винта 10 регулируется как функция режима полета для регулирования пространственного положения (ориентации) фюзеляжа. Угол продольной балансировки предпочтительно поддерживается равным наклону траектории полета с тем, чтобы уменьшать угол атаки фюзеляжа и в соответствии с этим минимизировать аэродинамическое сопротивление фюзеляжа. Следовательно, продольная балансировка гибридного вертолета 1 поддерживается при значении нуля во время горизонтального полета на крейсерском режиме.
На практике поверхность 35 управления шагом может регулироваться вручную в упрощенной версии. В таком случае на панели управления необходимо предусмотреть индикатор для индикации изгибающего момента, прикладываемого к опоре 12 несущего винта, изгибающий момент которой пилот должен поддерживать в заданном диапазоне, действуя вручную на указанную поверхность 35 управления шагом или фактически на электрический привод 70.
Когда поверхность 35 управления шагом управляется автоматически в улучшенной версии, электрический привод 70 регулируется посредством компьютера 60, который определяет изгибающий момент, прикладываемый к опоре 12 несущего винта, как получаемый из информации передаваемой датчиками 71, предпочтительно тензодатчиками, расположенными на указанной опоре 12 несущего винта. В этом случае компьютер 60 прекращает двигать указанную, по меньшей мере, одну поверхность 35 управления шагом вокруг ее оси АХ, когда изгибающий момент, прикладываемый к опоре несущего винта относительно оси тангажа, лежит в заданном диапазоне, соответствующем по существу первому установочному значению, для момента тангажа указанного гибридного вертолета 1, значение которого предпочтительно равно нулю.
Как результат компьютер 60, электрический привод 70 и датчики 71 составляют первые средства для автоматического регулирования угла, при котором указанная, по меньшей мере, одна поверхность 35 управления шагом устанавливается как функция изгибающего момента, прикладываемого к опоре 12 несущего винта относительно оси тангажа гибридного вертолета 1. Естественно, для этой операции представляется возможным использование множества поверхностей 35 управления шагом.
Вторые средства 13, 14, 16, 17 независимо управляют циклическим шагом лопастей 11 несущего винта 10 так, чтобы регулировать продольную балансировку гибридного вертолета 1 как функции режима полета, адаптируя его до второго установочного значения, относящегося к указанной продольной балансировке.
Таким образом, указанное второе установочное значение предпочтительно соответствует углу продольной балансировке, равному наклону траектории полета винтокрылого летательного аппарата, как указано выше.
Следовательно, это второе значение продольной балансировки равно нулю во время горизонтального полета гибридного вертолета 1.
Указанные вторые средства содержат ручку 13 управления циклическим шагом, которая управляет органами 14 сервоуправления для сообщения циклического шага лопастям 11 несущего винта 10 через посредство тарелки 16 автомата перекоса (несущего винта) и шаговых рычагов 17.
На практике оказывается, что пилот может использовать искусственный горизонт для гарантии поддерживания нулевой продольной балансировки в горизонтальном полете, благодаря использованию вторых средств 13, 14, 16, 17.
В противоположность этому должна быть реализована адекватная система, когда требуется произвольный наклон на траектории полета.
Для этой цели указанные вторые средства связывают с устройством 80 для автоматического сервоуправления продольной балансировкой гибридного вертолета 1, причем это устройство 80 автоматического сервоуправления интегрировано в автопилот 81 и специально содержит систему 82 глобального позиционирования для определения указанного наклона траектории полета и пространственного положения (ориентации) и эталонную систему 83 направления полета, предназначенную для определения балансировки гибридного вертолета 1 таким образом, чтобы получить из нее угол атаки фюзеляжа указанного гибридного вертолета 1 относительно потока воздуха и сделать его нулевым, вместе с анемометром 84 для корректировки ошибок, связанных с ветром.
Эта регулировочная операция заключается в правильном позиционировании фюзеляжа 2 и несущего винта 10 под углом атаки, который по существу является нулевым относительно потока воздуха, для достижения минимального общего аэродинамического сопротивления и максимального аэродинамического качества. По сравнению с работой в режиме автожира, баланс является предпочтительным, причем причиной является то, что при небольших изменениях продольной балансировки несущего винта сильно изменяется аэродинамическое качество несущего винта. Следовательно, несущему винту «обеспечивается тяга» без какого-либо изменения общего коэффициента полезного действия.
С точки зрения механики полета вспоминается, что несущий винт 10 служит для обеспечения всей аэродинамической подъемной силы гибридного вертолета 1 во время стадий взлета, посадки и вертикального полета, и некоторой аэродинамической подъемной силы во время полета на крейсерском режиме, причем крыло 3 в таком случае делает вклад в обеспечении части аэродинамической подъемной силы для поддерживания указанного гибридного вертолета 1.
Естественно, поскольку несущий винт 10 всегда приводится в действие механически посредством газотурбинного двигателя 5, этот несущий винт 10 генерирует «резистивный крутящий момент несущего винта», который склонен побуждать фюзеляж 2 поворачиваться в противоположном направлении вращения несущего винта 10.
Гибридный вертолет 1, соответствующий настоящему изобретению, не имеет рулевого винта для упрощения его механических узлов и, следовательно, для уменьшения массы и стоимости винтокрылого летательного аппарата.
Следовательно, поскольку гибридный вертолет 1 имеет два воздушных винта 6, причем каждый установлен на полукрыле 8 на каждой стороне фюзеляжа 1, функции рулевого управления и гашения момента от несущего винта обеспечиваются использованием дифференциальной тяги, имеется отличие между тягами, создаваемыми воздушными винтами.
Другими словами, в вертикальном полете воздушный винт 6 на левой стороне фюзеляжа обеспечивает тягу по направлению к задней части винтокрылого летательного аппарата («заднюю тягу»), тогда как воздушный винт 6 на правой стороне обеспечивает тягу по направлению к передней части («переднюю тягу»), допуская, что несущий винт 10 вращается в направлении против движения часовой стрелки, если смотреть сверху.
В одном варианте функция гашения момента от несущего винта может также выполняться так, чтобы на выше приведенном примере правый воздушный винт развивал двойную тягу, тогда как левый воздушный винт 6 не обеспечивает какой-либо тяги, причем очевидно, что несущий винт 10 должен в таком случае наклоняться к задней части винтокрылого летательного аппарата для балансировки тяги от правого воздушного винта. При таком режиме может быть показано, что больше требуется мощности, чем когда два воздушных винта обеспечивают тягу в противоположных направлениях.
Следовательно, на основе вышеописанного примера и фиг.4, скорость вращения несущего винта 10 равна первой скорости вращения Ω1, составляющей 263 оборота в минуту для первой скорости в направлении вперед, более корректно называемой первой споростью полета V1 траектории полета при скорости 125 узлов. При более высоких скоростях и выше до второй скорости полета V2 траектории полета при скорости 220 узлов скорость вращения несущего винта постепенно уменьшается до второй скорости вращения Ω2, составляющей 205 оборотов в минуту. Постепенное уменьшение скорости вращения несущего винта 10 между первой и второй скоростями траектории полета изменяется при использовании линейной зависимости наклона (-1/R), где R - радиус несущего винта, и в системе координат, где скорость V откладывается по оси абсцисс, а скорость вращения Ω откладывается по оси ординат.
Квалифицированный специалист в этой области техники знает, что, если скорость полета увеличивается, то число Маха в конце поступательно движущейся лопасти несущего винта винтокрылого летательного аппарата достигает числа Маха, известного как число Маха «дивергенции сопротивления».
В таком случае и при максимальном числе Маха, которое меньше или равно так называемому числу Маха дивергенции сопротивления профиля конца лопасти, скорость вращения несущего винта требуется постепенно уменьшать как функцию увеличения скорости винтокрылого летательного аппарата в направлении вперед, чтобы избежать превышения этого предела.
Если скорость звука записывается как с, то число Маха на конце поступательно движущейся лопасти равно выражению (V+U) или фактически (V+ΩR)/c. Устанавливаем максимальное число Маха равным величинам Mm для побуждения Ω изменяться при применении следующей линейной зависимости [(c.Mn-V)R].
Допуская, что максимальное число Маха равно 0,85, а периферийная скорость у вершины лопасти 220 м/с в вертикальном полете (скорость вращения несущего винта составляет 263 оборота в минуту), число Маха поступательно движущейся лопасти достигает 0,85 при скорости полета 125 узлов траектории полета на высоте 1500 м в условиях ISA (внешняя температура: 5°C).
В диапазоне 125-220 узлов скорость вращения несущего винта адаптируется для согласования с вышеопределенной зависимостью.
Когда скорость полета винтокрылого летательного аппарата траектории полета составляет 220 узлов, скорость полета на вершине лопасти вследствие вращения равна 171 м/с (скорость вращения несущего винта: 205 оборотов в минуту или 78% номинальной скорости вращения ротора), а параметр µ поступательного движения равен 0,66. При таком значении параметра поступательного движения аэродинамическая подъемная сила несущего винта не может поддерживаться без большого увеличения в хорде лопастей (60% увеличения, которое бы привело к стандартному четырехлопастному вертолету, имеющему хорду один метр) для сохранения среднего коэффициента Czm аэродинамической силы лопасти менее 0,5 и, таким образом, предотвращения отрыва потока у удаляющейся лопасти. Очевидно, что такое завышение габарита лопастей при высокой скорости полета вперед ведет к значительному увеличению в массе винтокрылого летательного аппарата и ухудшению его летно-технических характеристик. Следовательно, несущий винт гибридного вертолета 1, имеющий максимальную санкционированную массу взлета 8 т, постепенно имитируется крылом 3 небольшого размаха L, который сообщает аэродинамическую подъемную силу приблизительно 31% при скорости 220 узлов. При таком режиме, когда скорость полета траектории полета увеличивается, коэффициент Czm аэродинамической силы лопастей, который в вертикальном полете равен 0,5 (с вкладом аэродинамической подъемной силы крыла, оцениваемым в 4,5%), уменьшается, достигая 0,43 при скорости 125 узлов вследствие увеличения аэродинамической подъемной силы от крыла 3, и он увеличивается, достигая значения 0,54 при скорости 220 узлов, вследствие уменьшения скорости вращения несущего винта до 78% его номинальной скорости вращения. В таком режиме несущий винт работает с максимальным аэродинамическим качеством приблизительно 12,2.
Наконец, общая архитектура гибридного вертолета 1, соответствующего настоящему изобретению, связанная с
постоянным коэффициентом пропорциональности между скоростями вращения газотурбинных двигателей 5, несущего винта 10, воздушных винтов 6 и механической соединительной системы 15, приводной системы, вращающейся с первой скоростью до первой скорости транспортного средства движения вперед;
устройством 70 для регулирования и поддержания продольной балансировки транспортного средства при значении нуля и без рулевого винта;
интегральной приводной системой 4; и
механической соединительной системой 15 при несущем винте с реактивным двигателем для лучшей механической эффективности и меньшего шума;
вся вносит вклад в получение высокого коэффициента полезного действия.
Таким образом, гибридный вертолет 1 отличается исключительной универсальностью (гибкостью в применении), дающей ему возможность оптимизировать компромисс между скоростью, дальностью действия и массой транспортного средства. Например, приблизительно с 2 т топлива можно получать следующие летно-технические характеристики для гибридного вертолета 1 массой приблизительно 8 т и транспортирующего 16 пассажиров:
продолжительность зависания (висения): 4,2 часа;
практичная дальность действия при скорости 220 узлов: 511 морских миль; и
практичная дальность действия при экономичной скорости 125 узлов полета на крейсерском режиме: 897 морских миль.
Аналогичным образом и, например, полет на 400 морских миль при скорости 20 узлов может быть выполнен приблизительно с 1,6 т топлива и 20 минутным запасом.
Эти результаты демонстрируют большую величину гибкости и адаптивности гибридного вертолета 1 и его преимущества по сравнению со стандартным вертолетом. Скорость стандартного вертолета на крейсерском режиме имеет только небольшое влияние на его потребление топлива во время полета, также его максимальная скорость полета на крейсерском режиме относительно близка к экономичной скорости на крейсерском режиме, так что только выбор увеличения практичной дальности действия транспортного средства значительно должен уменьшить число пассажиров так, чтобы дополнительное топливо могло быть взято на борт.
Естественно, настоящее изобретение может быть подвергнуто различным изменениям в отношении его реализации. В частности, важно видеть, что настоящее изобретение, как описано, относится в особенности к гибридному вертолету общей массой приблизительно 8 т. Тем не менее настоящее изобретение применимо к любому винтокрылому летательному аппарату произвольной массы, например, от беспилотной модели малой массы до транспортного средства очень большого тоннажа. Хотя выше описано несколько вариантов осуществления настоящего изобретения, очевидно, что немыслимо идентифицировать исключительно все возможные варианты осуществления. Естественно можно предусмотреть замену любых описанных средств эквивалентными средствами без выхода за объем настоящего изобретения.
Настоящее изобретение относится к авиации, в частности к конструкции гибридных (комбинированных) вертолетов. Гибридный вертолет (1) содержит фюзеляж (2), поверхность (3), генерирующую аэродинамическую подъемную силу, поверхности (30, 35, 40) стабилизаторов и интегральную приводную систему. Интегральная приводная система образована механической соединительной системой (15) между несущим винтом (10) радиуса (R) с управлением общим и циклическим шагом лопастей (11) указанного несущего винта (10), по меньшей мере, одним воздушным винтом (6) с управлением общим шагом лопастей указанного воздушного винта (6) и, по меньшей мере, одним газотурбинным двигателем (5), приводящим в действие указанную механическую соединительную систему (15). Выходные скорости вращения указанного, по меньшей мере, одного газотурбинного двигателя (5), указанного, по меньшей мере, одного воздушного винта (6), указанного несущего винта (10) и указанной механической соединительной системы (15) являются взаимно пропорциональными, причем коэффициент пропорциональности является постоянным на всех режимах полета. Несущий винт генерирует подъемную силу, необходимую для взлета, посадки, зависания и полета в вертикальном направлении, и часть подъемной силы для горизонтального полета. 20 з.п. ф-лы, 4 ил.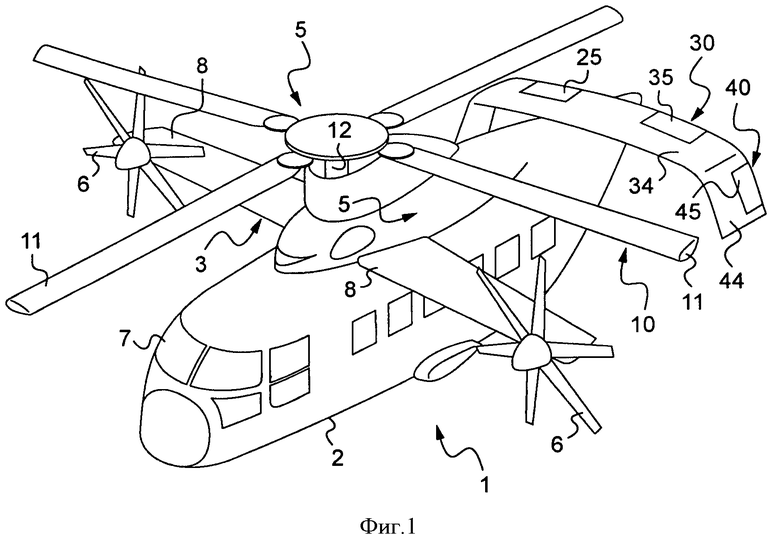
1. Гибридный вертолет (1), имеющий дальний радиус действия и высокую скорость движения вперед, содержащий авиационную конструкцию, слагаемую из фюзеляжа (2); поверхности (3), генерирующей аэродинамическую подъемную силу, закрепленной на фюзеляже (2); и поверхности для стабилизации и маневрирования, в частности по тангажу: горизонтальный стабилизатор (30), по меньшей мере, с одной поверхностью (35) управления по тангажу, которая является подвижной относительно передней части (34) или «горизонтальной плоскости»; и для рулевого управления: по меньшей мере, один соответствующий стабилизатор (40); и интегральную приводную систему (4), образуемую механической соединительной системой (15) между, во-первых, несущим винтом (10) радиуса (R) с управлением общим шагом и циклическим шагом лопастей (11) указанного несущего винта (10), и, во-вторых, по меньшей мере, одним воздушным винтом (6) с управлением общим шагом лопастей указанного воздушного винта (6); и, по меньшей мере, одним газотурбинным двигателем (5), приводящим в действие механическую соединительную систему (15); при этом указанный вертолет, отличающийся тем, что выходные скорости вращения указанного, по меньшей мере, одного газотурбинного двигателя (5), указанного, по меньшей мере, одного воздушного винта (6), указанного несущего винта (10) и указанной механической соединительной системы (15) являются взаимно пропорциональными, причем коэффициент пропорциональности является постоянным независимо от конфигурации полета гибридного вертолета (1) в нормальном режиме работы интегральной приводной системы.
2. Гибридный вертолет (1) по п.1, отличающийся тем, что стабилизатор (40) содержит на передней части неподвижное хвостовое оперение (44) с установленным рулем (45) направления рулевого управления для обеспечения пилота органом управления рысканием.
3. Гибридный вертолет (1) по п.1, отличающийся тем, что указанный несущий винт (10), во-первых, генерирует всю аэродинамическую подъемную силу, необходимую для взлета, для посадки, для зависания и для полета в вертикальном направлении, и, во-вторых, всегда обеспечивает часть аэродинамической силы, необходимую для полета на крейсерском режиме, причем указанный несущий винт (10) всегда приводится во вращение посредством указанного, по меньшей мере, одного газотурбинного двигателя (5), без участия в тяге или сопротивлении, с уменьшенной потребляемой мощностью.
4. Гибридный вертолет (1) по п.1, отличающийся тем, что указанный несущий винт (10), во-первых, генерирует всю аэродинамическую подъемную силу, необходимую для взлета, для посадки, для зависания и для полета в вертикальном направлении, и, во-вторых, всегда обеспечивает часть аэродинамической силы, необходимую для полета на крейсерском режиме, причем указанный несущий винт (10) всегда приводится во вращение посредством указанного, по меньшей мере, одного газотурбинного двигателя (5), с уменьшенным вкладом в тягу, но без вклада в сопротивление, и с уменьшенной потребляемой мощностью.
5. Гибридный вертолет (1) по п.3, отличающийся тем, что аэродинамическая подъемная сила, генерируемая несущим винтом (10), составляет 1,05 массы гибридного вертолета (1) для нулевой скорости полета по траектории полета и лежит в диапазоне 0,6-0,9 массы вертолета при максимальной скорости полета по траектории полета.
6. Гибридный вертолет (1) по п.4, отличающийся тем, что аэродинамическая подъемная сила, развиваемая несущим винтом (10), составляет приблизительно 1,05 массы гибридного вертолета (1) для нулевой скорости полета траектории полета и лежит в диапазоне 0,6-0,9 массы вертолета при максимальной скорости полета траектории полета.
7. Гибридный вертолет (1) по п.1, отличающийся тем, что размах создающей аэродинамическую подъемную силу поверхности (3), образованной из двух полукрыльев (8), по существу, равен радиусу (R) несущего винта (10).
8. Гибридный вертолет (1) по п.1, отличающийся тем, что создающая аэродинамическую подъемную силу поверхность (3) находится в высоком положении относительно фюзеляжа (2), причем двугранный угол создающей аэродинамическую силу поверхности (3) является отрицательным.
9. Гибридный вертолет (1) по п.1, отличающийся тем, что создающая аэродинамическую подъемную силу поверхность (3) находится в низком положении относительно фюзеляжа (2), причем двугранный угол создающей аэродинамическую подъемную силу поверхности (3) является положительным.
10. Гибридный вертолет (1) по п.1, отличающийся тем, что создающая аэродинамическую подъемную силу поверхность (3) находится в промежуточном положении между высоким положением и низким положением.
11. Гибридный вертолет (1) по п.1, отличающийся тем, что относительное удлинение (λ) создающей аэродинамическую подъемную силу поверхности (3) составляет приблизительно 5,3.
12. Гибридный вертолет (1) по п.1, отличающийся тем, что указанный гибридный вертолет (1) снабжен двумя воздушными винтами (6), причем каждый воздушный винт (6) расположен на внешнем конце создающей аэродинамическую подъемную силу поверхности (3), противоположном другому воздушному винту (6).
13. Гибридный вертолет (1) по п.1, отличающийся тем, что общий шаг и циклический шаг лопастей (11) несущего винта (10) регулируются и адаптируются как функция режима полета.
14. Гибридный вертолет (1) по п.1, отличающийся тем, что общий шаг воздушных винтов (6) регулируется и адаптируется как функция режима полета.
15. Гибридный вертолет (1) по п.1, отличающийся тем, что горизонтальный стабилизатор (30) и вертикальный стабилизатор (40) вместе образуют перевернутую U-образную конфигурацию относительно фюзеляжа (2).
16. Гибридный вертолет (1) по п.1, отличающийся тем, что газотурбинные двигатели (5) размещены на фюзеляже (2).
17. Гибридный вертолет (1) по п.1, отличающийся тем, что два газотурбинных двигателя (5) размещены на создающей аэродинамическую подъемную силу поверхности (3), причем по одному газотурбинному двигателю (5) расположено на каждой стороне указанного фюзеляжа (2).
18. Гибридный вертолет (1) по п.1, отличающийся тем, что функция гашения момента от несущего винта выполняется одним воздушным винтом (6).
19. Гибридный вертолет (1) по п.12, отличающийся тем, что функцию гашения момента от несущего винта выполняют с помощью дифференциальной тяги между воздушными винтами (6), причем один воздушный винт обеспечивает тягу к передней части, а другой обеспечивает тягу к задней части гибридного вертолета (1).
20. Гибридный вертолет (1) по п.1, в котором скорость вращения (Ω) несущего винта (10) равна первой скорости вращения (Ω1) до первой скорости полета (V1) траектории полета указанного гибридного вертолета (1), а затем постепенно уменьшается при использовании линейной зависимости как функции скорости полета по траектории полета указанного гибридного вертолета (1).
21. Гибридный вертолет (1) по п.20, в котором, начиная от первой скорости вращения (Ω1), скорость вращения (Ω) несущего винта постепенно уменьшается до второй скорости вращения (Ω2) при второй скорости полета (V2) гибридного вертолета (1).
| US 2002011539 A1, 23.01.2001 | |||
| Богданов Ю.С | |||
| Конструкция вертолетов | |||
| - М.: изд | |||
| Машиностроение, 1990, с.189-195, рис.11.1, 11.2 | |||
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА В САМОЛЕТНУЮ КОНФИГУРАЦИЮ И КОМБИНИРОВАННЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ ВИНТОКРЫЛОЙ СХЕМЫ | 1994 |
|
RU2092392C1 |
| Энциклопедия «Авиация», ЦАГИ, изд | |||
| Большая Российская Энциклопедия, 1994, с.78, рис.3 | |||
| Далин В.Н | |||
| Конструкция вертолетов | |||
| - М.: изд | |||
| Машиностроение, 1971, с.20,21, рис.15 | |||
| US 3698666 A, 17.10.1972 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2212358C1 |
| US 4928907 A, 29.05.1990. | |||

