Изобретение относится к авиационной технике, более конкретно, к конструкции движительной системы вертолетов и скоростных летательных аппаратов вертикального взлета и посадки.
Известно множество различных типов вертолетов с соосными несущими винтами, но наиболее широко известными являются вертолеты открытого акционерного общества "Камов" (см. журнал "Вертолет" №3 (18) за 2002 год, ЗАО "Периодика").
Однако опыт эксплуатации вертолетов с соосными несущими винтами показывает, что в техническом обслуживании наиболее трудоемкими являются работы, связанные с обслуживанием системы управления несущими винтами двумя автоматами перекоса, а также их низкая надежность и скорость горизонтального полета. Поэтому в последнее время наметилась мировая тенденция сокращения выпуска вертолетов с соосными винтами и их вытеснение винтокрылыми летательными аппаратами других видов.
Наиболее близким аналогом, в решении которого предпринята попытка частичного устранения этих проблем, является система привода соосных несущих винтов летательного аппарата с толкающим винтом, описанная в патенте RU №2377161, МПК В64С 27/00. Эта система соосного привода высокоскоростного винтокрылого летательного аппарата содержит систему из верхнего и нижнего несущих винтов, основной редуктор для привода упомянутой системы несущих винтов, обгонную муфту и систему поступательной тяги.
При этом система поступательной тяги приводится в действие основным редуктором, а обгонная муфта вводится в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый системой несущих винтов в результате авторотации, поглощается системой поступательной тяги в ходе высокоскоростного полета, когда несущий винт находится в состоянии авторотации, и тем самым осуществляют разгрузку крутящего момента, развиваемого системой несущих винтов.
Эта известная система требует обязательного использования двух автоматов перекоса лопастей верхнего и нижнего несущего винтов для путевого управления полетом и наличия винта поступательной тяги для улучшения режима авторотации несущих винтов, особенно при неработающем двигателе.
Технической задачей настоящего изобретения является упрощение конструкции и обслуживания вертолета с соосными винтами и повышение их аэродинамической эффективности как при скоростном горизонтальном полете, так и в режимах автожира и аварийной посадки на авторотации несущих винтов. Последнее наиболее актуально для легких и боевых вертолетов.
Решение поставленной задачи обеспечивает заявляемая движительная система высокоскоростного винтокрылого летательного аппарата, содержащая винт переменного шага поступательной тяги, соосные несущие винты противовращения, двигатель, основной редуктор для привода упомянутых несущих винтов, обгонную муфту, избирательно вводимую в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый соосной системой несущих винтов в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета.
В отличие от прототипа лопасти верхнего несущего винта жестко закреплены на внутреннем валу соосных винтов, а нижний несущий винт, с автоматом перекоса, установлен на внешнем трубчатом валу соосных винтов. Внутренний и внешний валы кинематически связаны с осями двойного дифференциала, снабженного тормозами путевого управления соответствующих полуосей входящих в его состав двух открытых дифференциалов с общей промежуточной осью блокирующего тормоза переключения режимов их синхронного или равномоментного противовращения. Общий ведущий вал главных зубчатых передач открытых дифференциалов соединен через муфту сцепления с основным редуктором, который связан трансмиссионным валом с винтом переменного шага поступательной тяги, а через обгонную муфту - с двигателем летательного аппарата.
Также для движительной систтемы высокоскоростного винтокрылого летательного аппарата предлагается, что в системе соосных несущих винтов лопасти верхнего несущего винта жестко закреплены на внутреннем валу соосных винтов, а нижний несущий винт снабжен автоматом перекоса и установлен на внешнем трубчатом валу соосных винтов, при этом на законцовках верхнего жесткого винта установлены вертикальные крыльчатые лопасти ротора Дарье с вертикальной осью вращения и/или установлены в центральной части на внутреннем валу верхнего несущего винта роторы либо в виде ротора Савониуса с полуцилиндрическим лопастями, закрепленными на горизонтальных раздвижных штангах внутреннего вала, либо в виде ротора в форме усеченного конуса, изготовленного из просечно-вытяжной металлической сетки с проявлением поперечной силы эффекта Магнуса. Предложенная трансмиссия винтов и роторов аналогична выше описанной.
Также предложено, что движительная система высокоскоростного винтокрылого летательного аппарата содержит винт поступательной тяги, по крайней мере, нижний несущий винт на внешнем трубчатом валу соосного привода, снабженный автоматом перекоса, двигатель, основной редуктор для соосного привода, обгонную муфту, избирательно вводимую в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый движительной системой в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета. В отличие от прототипа на внутреннем валу соосного привода жестко установлен верхний ротор, выполненный в виде усеченного конуса, изготовленного из просечно-вытяжной металлической сетки и закрепленного с проявлением аэродинамической силы эффекта Магнуса при вращении. При этом предложенная трансмиссия верхнего ротора и нижнего несущего винта аналогична выше описанным.
Проведенный заявителем анализ уровня техники позволил установить, что отсутствуют аналогичные конструкции винтокрылых ЛА с двумя соосными несущими винтами, характеризующиеся наличием ротора с вертикальной осью вращения на верхнем несущем винте без автоматом перекоса, и выполнением нижнего несущего винта с одним автоматом перекоса, что обуславливает новизну изобретения и решение поставленной технической задачи.
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявляемого технического решения, показали, что они не следуют явным образом из существующего уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявляемого технического решения преобразований на достижение указанного технического результата, то есть создания нового типа вертолетов с оригинальной трансмиссией винтов и роторов. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
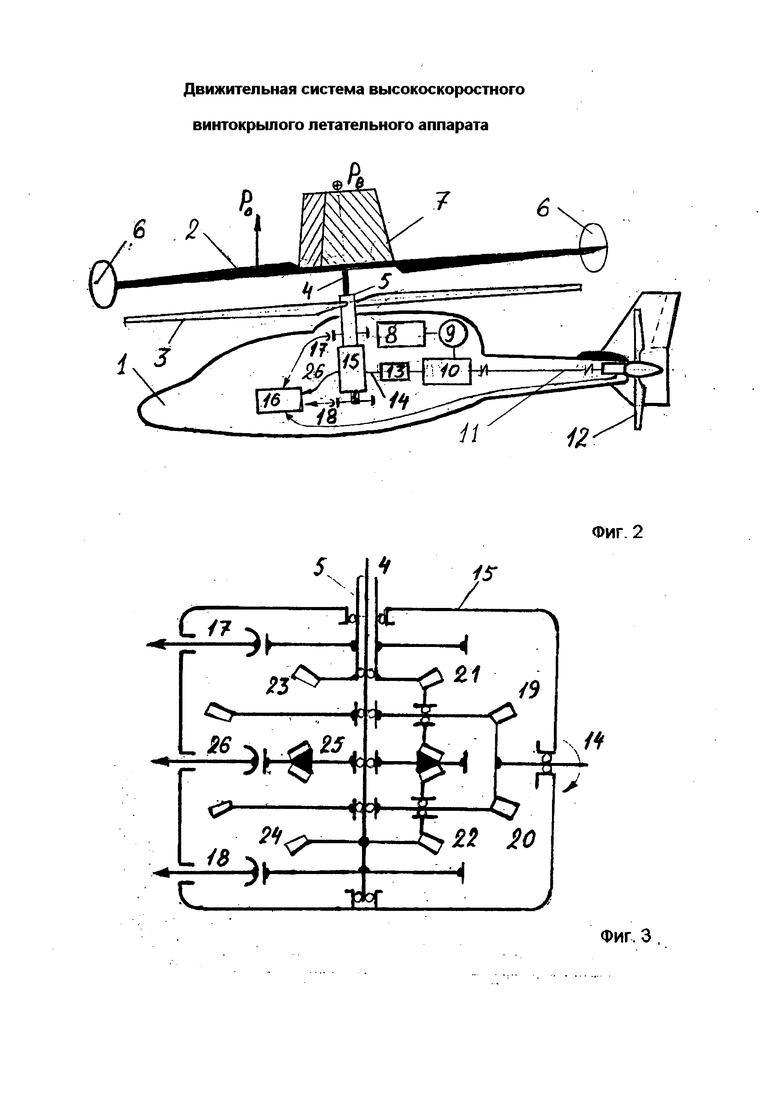
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид сверху скоростного вертолета с предложенной движительной системой на фиг. 2 дана боковая проекция винтов с функциональной схемой привода, на фиг. 3 изображена кинематическая схема двойного дифференциала противовращения с тормозами управления, а на фиг. 4 показан внешний вид просечно-вытяжной сетки для обтяжки аэродинамической поверхности роторов.
Движительная система высокоскоростного винтокрылого летательного аппарата 1 содержит два соосных несущих винта - верхний 2 и нижний 3, установленных соответственно на внутреннем 4 и внешнем 5 трубчатом валу с возможностью вращения в противоположные стороны.
Лопасти верхнего несущего винта 2, не имеющего автомата перекоса, жестко закреплены на внутреннем валу соосных винтов, а нижний несущий винт снабжен автоматом перекоса и установлен на внешнем трубчатом валу. На законцовках верхнего жесткого винта 2 установлены вертикальные крыльчатые лопасти ротора Дарье 6 с вертикальной осью вращения.
На внутреннем валу верхнего несущего винта 2 в центральной части может быть установлен ротор в виде ротора Савониуса 7 с полуцилиндрическим лопастями, закрепленными на горизонтальных раздвижных штангах внутреннего вала, изменяющих зазор между ними (не показаны).
На внутреннем валу верхнего несущего винта 2 в центральной части может быть установлен ротор с вертикальной осью вращения с поверхностью усеченного конуса, изготовленный из просечно-вытяжной металлической сетки, обеспечивающий при вращении проявление поперечной силы ввиду эффекта Магнуса (фиг. 4). Такая сетка фактически является многощелевым поликрылом аэродинамической решетки, состоящим из узких пересекающихся лент дугообразного профиля и обладающим анизотропными аэродинамическими свойствами в направлениях просечки и вытяжки.
Двигатель 8 для вращения несущих винтов 2 и 3 кинематически связан через обгонную муфту 9 с основным редуктором 10, который через трансмиссионный вал 11 соединен с винтом переменного шага поступательной тяги 12, а через муфту сцепления 13 соединен с ведущим валом 14 двойного дифференциала противовращения 15. Качание лопастей нижнего несущего винта 3 внешнего вала 5 осуществляется одним стандартным автоматом перекоса воздушного потока (не показан), приводимого в движение по командам от системы управления 16, например рычагами шаг-газ, и продольно-поперечного управления вертолетом.
При этом педали путевого управления этой системы управления 16 могут быть непосредственно связаны с соответствующими тормозами 17 и 18 двойного дифференциала 15, который содержит две главные зубчатые передачи 19, 20 водил подвижных осей двух комплектов сателлитов 21, 22, которые контактируют с зубчатыми венцами выходных полуосей 23, 24 этих дифференциалов и их общей промежуточной осью 25 с блокирующим тормозом 26 переключения режимов синхронного или равномоментного противовращения несущих винтов 2 и 3. Винт переменного шага поступательной тяги 12 так же имеет связь с системой управления 16, которая может поворачивать его лопасти на заданный угол во флюгерное либо в нейтральное положение.
Движительная система высокоскоростного винтокрылого летательного аппарата функционирует следующим образом.
В режиме вертолета двигатель 8 через трансмиссию, состоящую из узлов 9, 10, 13, 14 и 15, при выключенном блокирующем тормозе 26 равномоментно вращает в противоположные стороны несущие винты 2, 3, и летательный аппарат 1 взлетает вертикально, так как реактивные моменты винтов Мн и Мв взаимно компенсируются, а лопасти винта поступательной тяги 12 находятся в нейтральном положении.
Если же тормозами 23 или 24 притормаживать верхний 2 или нижний 3 винт, то часть вращающего момента вместо соответствующего несущего винта будет так воздействовать на фюзеляж вертолета, что он развернется в соответствующую сторону под влиянием разностного момента М=Мн-Мв.
Аналогичным образом происходит путевое управление и в режиме горизонтального полета под воздействием поступательной силы тяги винта переменного шага 12. При этом верхние роторы Дарье, Савониуса и сетчатый ротор Магнуса создают горизонтальную восстанавливающую силу Рв, которая компенсирует вертикальную опрокидывающую силу Po наступающей лопасти нижнего винта.
Благодаря положительному углу атаки α (фиг. 1) лопасти ротора Дарье 6 подгребают периферийный воздух вовнутрь ометаемой поверхности нижнего несущего винта 3, а центральный сетчатый ротор Магнуса или Савониуса 7, наоборот, отбрасывают воздушный поток от малоэффективных комлевых частей несущего винта 3 к его средней части, что существенно увеличивает подъемную силу несущих винтов 2 и 3. Применение обоих роторов в режиме вертолета аналогично по достигаемому эффекту.
В режиме автожира муфта сцепления 13 выключается, а блокирующий тормоз 26 включается и двигатель 8 через обгонную муфту 9 и основной редуктор 10 вращает только винт переменного шага поступательной тяги 12, а вращение нижнего несущего винта 3 осуществляется за счет набегающего потока воздуха, воздействующего на один из верхних роторов, который при этом функционирует как приводной ветродвигатель, например за счет воздействия на полупроницаемую сетку ротора Магнуса, фиг. 4, которая работает как полиплановое крыло, состоящее из узких ленточных лопастей.
В режиме аварийной посадки на авторотации с выключенным двигателем 8 он, благодаря обгонной муфте 9, не мешает работе трансмиссии летательного аппарата и вращению его несущих винтов от воздействия горизонтальной компоненты набегающего потока воздуха на винт переменного шага поступательной тяги 12 и соответствующий ротор 6, 7 или жесткий винт 2. Даже при неработающем винте поступательной тяги 12 и выключенной муфте сцепления 13 надежное вращение нижнего несущего винта 3 обеспечивается этими же роторами, винтом 6, 7, 2 (в режиме авторотации-ветродвигателями) при синхронной работе двойного дифференциала 15, тормоза которого 17 и 18 сохраняют путевое управление летательным аппаратом 1.
Вышерассмотренные варианты жесткого винта 2, роторов 6, 7 и винта переменного шага поступательной тяги 12 могут использоваться как совместно с управляемым несущим винтом 3, так и в паре с ним, но отдельно друг от друга, то есть на внутреннем валу с жестким винтом может быть задействован только ротор Дарье, или Савониуса, или сетчатый ротор Магнуса.
Таким образом, предлагаемая движительная система высокоскоростного винтокрылого летательного аппарата за счет равномоментной трансмиссии противовращения верхних роторов жесткого несущего винта и нижнего несущего винта с одним автоматом перекоса позволяет получить высокие скоростные характеристики в совокупности с надежностью и низкими энергетическими затратами во всех возможных режимах полета благодаря улучшенной аэродинамике несущей системы, что позволяет провести несложную модификацию существующих соосных вертолетов с двумя несущими винтами в перспективные вертолеты типа Notar (без рулевого винта) и другие винтокрылые летательные аппараты совершенно нового вида.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2009 |
|
RU2397919C1 |
| СИСТЕМА ПРИВОДА НЕСУЩИХ ВИНТОВ И УПРАВЛЕНИЯ ИМИ ДЛЯ ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2377161C2 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| УНИВЕРСАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ "ПУШ-ПУЛЕТ" | 2009 |
|
RU2412869C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЬНОЙ УСТАНОВКОЙ НА ВРАЩАЮЩЕЙСЯ ШТАНГЕ | 2018 |
|
RU2770389C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2698497C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2701083C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2701076C1 |


Изобретение относится к авиационной технике, в частности к конструкциям движительных систем летательных аппаратов. Движительная система высокоскоростного винтокрылого летательного аппарата содержит винт поступательной тяги и несущие винты противовращения, двигатель и основной редуктор для их движения, а также обгонную муфту, избирательно вводимую в зацепление с упомянутым основным редуктором таким образом, что крутящий момент, развиваемый системой несущих винтов в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета. Лопасти верхнего несущего винта жестко закреплены на внутреннем валу соосного привода, а нижний несущий винт снабжен автоматом перекоса и установлен на его внешнем трубчатом валу, оба вала привода кинематически связаны с осями двойного дифференциала, снабженными тормозами путевого управления соответствующих полуосей, входящих в него двух открытых дифференциалов с общей промежуточной осью блокирующего тормоза переключения режимов их синхронного или равномоментного противовращения. На законцовках лопастей жесткого несущего винта могут устанавливаться вертикальные лопасти ротора Дарье. Обеспечивается повышение аэродинамической эффективности. 3 н. и 1 з.п. ф-лы, 4 ил.
1. Движительная система высокоскоростного винтокрылого летательного аппарата, содержащая винт переменного шага поступательной тяги, соосные несущие винты противовращения, двигатель, основной редуктор для привода упомянутых несущих винтов, обгонную муфту, избирательно вводимую в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый соосной системой несущих винтов в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета, отличающаяся тем, что лопасти верхнего несущего винта жестко закреплены на внутреннем валу соосных винтов, а нижний несущий винт снабжен автоматом перекоса и установлен на внешнем трубчатом валу соосных винтов, внутренний и внешний валы кинематически связаны с осями двойного дифференциала, снабженного тормозами путевого управления соответствующих полуосей входящих в его состав двух открытых дифференциалов с общей промежуточной осью блокирующего тормоза переключения режимов их синхронного или равномоментного противовращения и общим ведущим валом их главных зубчатых передач, соединенным через муфту сцепления с основным редуктором, который связан трансмиссионым валом с винтом переменного шага поступательной тяги, а через обгонную муфту - с двигателем летательного аппарата.
2. Движительная система высокоскоростного винтокрылого летательного аппарата, содержащая винт переменного шага поступательной тяги, соосные несущие винты противовращения, двигатель, основной редуктор для привода упомянутых несущих винтов, обгонную муфту, избирательно вводимую в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый соосной системой несущих винтов в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета, отличающаяся тем, что лопасти верхнего несущего винта жестко закреплены на внутреннем валу соосных винтов, а нижний несущий винт снабжен автоматом перекоса и установлен на внешнем трубчатом валу соосных винтов, при этом на законцовках верхнего жесткого винта установлены вертикальные крыльчатые лопасти ротора Дарье с вертикальной осью вращения и/или установлены в центральной части на внутреннем валу верхнего несущего винта роторы либо в виде ротора Савониуса с полуцилиндрическим лопастями, закрепленными на горизонтальных раздвижных штангах внутреннего вала, либо в виде ротора в форме усеченного конуса, изготовленного из просечно-вытяжной металлической сетки с проявлением эффекта Магнуса, внутренний и внешний валы кинематически связаны с осями двойного дифференциала, снабженного тормозами путевого управления соответствующих полуосей входящих в его состав двух открытых дифференциалов с общей промежуточной осью блокирующего тормоза переключения режимов их синхронного или равномоментного противовращения и общим ведущим валом их главных зубчатых передач, соединенным через муфту сцепления с основным редуктором, который связан трансмиссивным валом с винтом переменного шага поступательной тяги, а через обгонную муфту - с двигателем летательного аппарата.
3. Движительная система по п. 2, отличающаяся тем, что полуцилиндрические лопасти ротора Савониуса изготовлены из металлической просечно-вытяжной сетки.
4. Движительная система высокоскоростного винтокрылого летательного аппарата, содержащая винт поступательной тяги, по крайней мере, нижний несущий винт на внешнем трубчатом валу соосного привода, снабженный автоматом перекоса, двигатель, основной редуктор для соосного привода, обгонную муфту, избирательно вводимую в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый движительной системой в результате авторотации, поглощается винтом поступательной тяги в ходе высокоскоростного полета, отличающаяся тем, что на внутреннем валу соосного привода жестко установлен верхний ротор, выполненный в виде аэродинамической поверхности усеченного конуса, изготовленного из просечно-вытяжной металлической сетки и закрепленного с проявлением эффекта Магнуса при вращении, оба вала соосного привода кинематически связаны с осями двойного дифференциала, снабженного тормозами путевого управления соответствующих полуосей входящих в его состав двух открытых дифференциалов с общей промежуточной осью блокирующего тормоза переключения режимов их синхронного или равномоментного противовращения и общим ведущим валом их главных зубчатых передач, соединенным через муфту сцепления с основным редуктором, который связан трансмиссивным валом с винтом переменного шага поступательной тяги, а через обгонную муфту - с двигателем летательного аппарата.
| US 2006269413 A1, 30.11.2006 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
| US 4367063 A, 04.01.1983 | |||
| Пневматический автоподатчик | 1961 |
|
SU142974A1 |

