Изобретение относится к области измерительной техники и может быть использовано для определения скорости движения транспортных средств одновременно с их обнаружением и идентификацией, что осуществляется с использованием радиоволн.
Известны способы и устройства для обнаружения, идентификации и определения скорости движения транспортных средств (патенты РФ №№ 2403109, 2126164, 2137202, 2237266, 2265889, 2290660, 2422909; патент Франции №2908224; патент WO №2007027074 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ обнаружения, идентификации и определения скорости движения транспортного средства и устройство для его осуществления» (патент РФ № 2422909, G08G 1/017, 2009), которые и выбраны в качестве прототипов.
Известный способ заключается в излучении зондируемого радиосигнала в направлении транспортного средства, приеме ответного сигнала и определении скорости путем измерения доплеровского смещения частоты ответного сигнала. При этом ответный сигнал транспортного средства формируют с помощью установленного на транспортном средстве узла ответного сигнала путем формирования ответного сигнала, содержащего информацию о транспортном средстве, и его переизлучения, после приема ответного сигнала выделяют из него информацию о транспортном средстве и формируют сигналы, соответствующие идентификационному номеру транспортного средства и скорости его движения.
Недостатком известных технических решений является низкая достоверность обнаружения и идентификации транспортных средств, что связано с тем, что ответный сигнал формируют путем преобразования принятого зондирующего сигнала и/или содержащим соответствующее кодовое слово с использованием фазовой или амплитудной модуляции.
Технической задачей изобретения является повышение достоверности обнаружения и идентификации транспортных средств путем использования радиочастотных меток на поверхностных акустических волнах и сложных сигналов с разовой манипуляцией.
Поставленная задача решается тем, что способ обнаружения, идентификации и определения скорости движения транспортного средства, заключающийся, в соответствии с ближайшим аналогом, в излучении зондирующего радиосигнала в направлении транспортного средства, приеме ответного сигнала и определении скорости путем измерения доплеровского смещения частоты ответного сигнала, при этом устанавливают на транспортном средстве узел ответного сигнала, с помощью которого формируют и излучают ответный сигнал транспортного средства, содержащий информацию о данном транспортном средстве, после приема ответного сигнала выделяют из него информацию о транспортном средстве и формируют сигналы, соответствующие идентификационному номеру транспортного средства и скорости его движения, отличается от ближайшего аналога тем, что в качестве узла ответного сигнала используют пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн, состоящим из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набором отражателей, принимают зондирующий радиосигнал микрополосковой приемопередающей антенной, преобразуют его с помощью встречно-штыревого преобразователя в акустическую волну, обеспечивают ее распространение и обратное отражение, преобразуют с помощью встречно-штыревого преобразователя в ответный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует идентификационному номеру транспортного средства, который является номером его государственной регистрации, излучают его в эфир, улавливают приемопередающей антенной измерительного узла, выделяют сложный сигнал с фазовой манипуляцией, измеряют ширину его спектра и ширину спектра его второй гармоники, сравнивают их между собой и в случае их различия формируют напряжение, которое сравнивают с пороговым напряжением, в случае его превышения принимают решение об обнаружении сложного сигнала с фазовой манипуляцией, осуществляют его синхронное детектирование с использованием зондирующего радиосигнала, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру транспортного средства, выделяют вторую гармонику ответного сигнала, делят ее фазу на два, выделяют ответный сигнал на несущей частоте, перемножают его с зондирующим радиосигналом, выделяют напряжение доплеровского смещения частоты ответного сигнала и измеряют его.
Поставленная задача решается тем, что устройство для обнаружения, идентификации и определения скорости движения транспортного средства, содержащее, в соответствии с ближайшим аналогом, измерительный узел, состоящий из передатчика и приемопередающей антенны, ориентированной вдоль движения транспортного средства, приемник с блоком измерения доплеровского смещения частоты, последовательно включенные блок обнаружения, блок декодирования и запоминающее устройство, к выходу которого подключены монитор и принтер, а также узел ответного сигнала, установленный на транспортном средстве, отличается от ближайшего аналога тем, что измерительный узел снабжен дуплексером, причем к выходу передатчика последовательно подключены дуплексер, вход-выход которого связан с приемопередающей антенной, приемник и обнаружитель, который выполнен в виде последовательно подключенных к выходу приемника удвоителя фазы, второго анализатора спектра, блока сравнения, второй вход которого через первый анализатор спектра соединен с выходом приемника, порогового блока, второй вход которого через линию задержки соединен с его выходом, и ключа, второй вход которого соединен с выходом приемника, а выход подключен к первому входу блока декодирования, второй вход которого соединен с выходом передатчика, блок измерения доплеровского смещения частоты выполнен в виде последовательно подключенных к выходу удвоителя фазы, делителя фазы на два, первого узкополосного фильтра, перемножителя, второй вход которого соединен с выходом передатчика, второго узкополосного фильтра и измерителя доплеровской частоты, узел ответного сигнала выполнен в виде пьезокристалла с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн, состоящим из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набором отражателей.
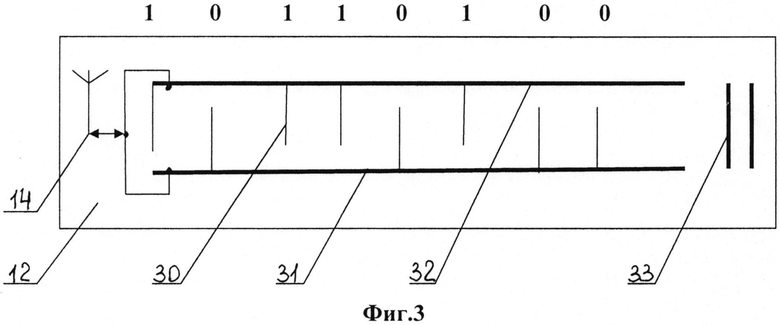
Способ измерения скорости движения транспортного средства поясняется с помощью чертежей, где на фиг.1 показан пример расположения средств обнаружения и измерения на проезжей части дороги, на фиг. 2, 3 - структурная схема устройства для реализации способа обнаружения, идентификации и определения скорости движения транспортного средства.
На чертежах сделаны следующие обозначения: 1 - измерительный узел, 3 - приемопередающая антенна, 12 - узел ответного сигнала, 16 - опора, 17 - полоса движения дорожного полотна, 18 - диаграмма направленности приемопередающей антенны 3 измерительного узла 1, 19 - транспортное средство.
Измерительный узел 1 содержит последовательно включенные передатчик 2, дуплексер 9, вход-выход которого связан с приемопередающей антенной 3, приемник 4, удвоитель 15 фазы, второй анализатор 20 спектра, блок 21 сравнения, второй вход которого через первый анализатор 13 спектра соединен с выходом приемника 4, пороговый блок 22, второй вход которого через линию задержки 23 соединен с его выходом, ключ 24, второй вход которого соединен с выходом приемника 4, блок 7 декодирования, второй вход которого соединен с выходом передатчика 2, и запоминающее устройство 8, к выходу которого подключены монитор 10 и принтер 11.
К выходу удвоителя 15 фазы последовательно подключены делитель 25 фазы на два, первый узкополосный фильтр 26, перемножитель 27, второй вход которого соединен с выходом передатчика 2, второй узкополосный фильтр 28 и измеритель 29 доплеровской частоты.
Удвоитель 15 фазы, анализаторы 13 и 20 спектра, блок 21 сравнения, пороговый блок 22, линия задержки 23 и ключ 24 образуют блок 5 обнаружения.
Делитель 25 фазы на два, узкополосные фильтры 26 и 28, перемножитель 27 и измеритель 29 доплеровской частоты образуют блок 6 измерения доплеровского смещения.
Узел 12 ответного сигнала выполнен в виде пьезокристалла с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн (ПАВ), состоящих из двух гребенчатых систем электродов 30, соединенных между собой шинами 31 и 32, связанными с микрополосковой приемопередающей антенной 14, и набором отражателей 33.
Способ обнаружения, идентификации и определения скорости движения транспортного средства реализуется следующим образом.
В заранее определенных местах дороги (в точках предполагаемой траектории движения транспортных средств), где осуществляется движение транспортных средств, снабженных узлом ответного сигнала, обеспечивающим прием, обработку и излучение радиосигнала в обратном направлении, устанавливают измерительные приемопередающие узлы, которые обеспечивают излучение зондирующего радиосигнала в направлении движущихся транспортных средств и прием ответных сигналов, сформированных узлом ответного сигнала, с последующим измерением скорости транспортного средства на основе определения доплеровского смещения частоты ответных сигналов и идентификации транспортного средства, на основе декодирования ответных сигналов.
Антенны приемопередающего узла могут быть размещены в толще или на дорожном покрытии, вблизи, сбоку или сверху над проезжей частью дороги на специальных опорах, столбах, мостах и т.д. На фиг. 1 показан пример расположения средств обнаружения и измерения над проезжей частью дороги на опорах.
Диаграмма направленности приемопередающей антенны 3 угла 1 зондирующего сигнала имеет игольчатую форму, а его главный лепесток ориентирован на соответственную полосу (полосы) проезжей части дороги. Диаграмма направленности антенны узла ответного сигнала сформирована равномерной. Игольчатые диаграммы направленности антенны имеют ширину главного лепестка 4° и ориентированы на соответствующую полосу движения, при этом мощность излучения передатчиков и чувствительность приемника выбраны из условия максимальной надежности работы на расстоянии 50 м, где ширина пятна главного лепестка диаграммы направленности антенны 3 измерительного узла 1 составит около 4 м, что соответствует полосе движения. При длине волны зондирующего сигнала 8 мм антенно-фидерное оборудование как измерительного узла, так и узла формирования ответного сигнала может быть выполнено достаточно малогабаритным и в то же время обеспечит высокую точность и надежность измерения.
Узел ответного сигнала закреплен в районе номерного знака автомобиля и обеспечивает формирование ответного сигнала, несущего уникальную информацию о самом транспортном средстве, благодаря модуляции (кодированию) ответного сигнала.
При движении автомобиля на оборудованном измерительным узлом 1 участке дороги автомобиль облучается зондирующим сигналом передатчика 2 измерительного узла 1, который излучает радиосигнал опроса постоянно

где uc, wc, φc, Tc - амплитуда, несущая частота, начальная фаза и длительность зондирующего радиосигнала.
Указанный радиосигнал улавливается микрополосковой приемопередающей антенной 14 узла 12 ответного сигнала, который выполнен в виде пьезокристалла, преобразуется встречно-штыревым преобразователем (ВШП) в акустическую волну, которая распространяется по поверхности пьезокристалла, отражается от набора 33 отражателей и преобразуется ВШП опять в радиосигнал с фазовой манипуляцией (ФМН):

где φk(t)={о,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с идентификационным номером M(t) транспортного средства, причем φk(t)=const при Кτэ<t<(k+1)τэ и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (K=1,2, …. N):
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью:
который излучается микрополосковой приемопередающей антенной 14 в эфир, улавливается приемопередающей антенной 3 измерительного узла 1 и через дуплексер 9 и приемник 4 поступает на вход блока 5 обнаружения. На входе удвоителя 15 фазы образуется напряжение
в котором манипуляция фазы уже отсутствует.
Ширина спектра Δf2 второй гармоники частоты сигнала определяется длительностью Tc сигнала 
Следовательно, при удвоении фазы ФМН-сигнала его ширина спектра «сворачивается» в N раз. Это обстоятельство и позволяет обнаружить и отселектировать сложный ФМН-сигнал среди других сигналов и помех даже тогда, когда его мощность на входе приемника 4 меньше мощности шумов и помех.
Ширина спектра Δfc сложного ФМН-сигнала измеряется с помощью анализатора 13 спектра, а ширина спектра Δf2 второй гармоники частоты сигнала - с помощью анализатора 20 спектра.
Напряжения UI и UII, пропорциональные Δfc и Δf2 соответственно, с выходов анализаторов 13 и 20 спектров поступают на два входа блока 21 сравнения. Так как UI>>UII, то на выходе блока 21 сравнения образуется постоянное напряжение, которое превышает пороговый уровень Uпор в пороговом блоке 22. Пороговое напряжение Uпор выбирается таким, чтобы его не превышали случайные помехи. При превышении порогового уровня Uпор в пороговом блоке 22 формируется постоянное напряжение, которое поступает на вход линии задержки 23 и на управляющий вход ключа 24, открывая его. В исходном состоянии ключ 24 всегда закрыт. При этом принимаемый ФМН-сигнал u1(t) с выхода приемника 4 через открытый ключ 24 поступает на первый (информационный) вход блока 7 декодирования, на второй (опорный) вход которого подается зондирующий радиосигнал uc(t) с выхода передатчика 2. В результате синхронного детектирования образуется низкочастотное напряжение
соответствующее идентификационному номеру транспортного средства.
Идентификационным номером транспортного средства является номер его государственной регистрации, вместе с тем, идентификационный номер может также включать в себя данные об агрегатах транспортного средства: номер двигателя, номер кузова и др.
Выявленный код в параллельном виде с выхода блока 7 декодирования подается на вход запоминающего устройства 8, к выходу которого подключены монитор 10 и принтер 11, для его визуального наблюдения или регистрации на бумагу в виде текстового документа.
На выходе делителя 25 фазы на два образуется гармоническое колебание

где ±Ω, - доплеровское смещение частоты;

R - расстояние между измерительным узлом 1 и узлом 12 ответного сигнала;
С - скорость распространения радиоволн,
которое выделяется узкополосным фильтром 26 и поступает на первый вход перемножителя 27, на второй вход которого подается зондирующий радиосигнал uc(t) с выхода передатчика 2. На выходе перемножителя 17 образуется напряжение доплеровской частоты
которое выделяется узкополосным фильтром 28 и поступает на вход измерителя 29 доплеровской частоты, который обеспечивает измерение доплеровской частоты ±Ω. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости, в зависимости от того, приближается или удаляется транспортное средство.
Время задержки τ линии задержки 23 выбирается таким, чтобы можно было проанализировать ответный сигнал. По истечении этого времени напряжение поступает на вход сброса порогового блока 22 и сбрасывает его содержимое на нулевое значение, подготавливая для дальнейшей работы.
Таким образом, предлагаемые технические решения по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение достоверности обнаружения и идентификации транспортных средств. Это достигается за счет использования радиочастотных меток на поверхностных акустических волнах и сложных сигналов с фазовой манипуляцией.
Отличительной особенностью радиочастотных меток на поверхностных акустических волнах являются малые размеры и отсутствие источника электропитания.
Сложные ФМН-сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность сложных ФМН-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМН-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМН-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМН-сигналов обусловлена большим разнообразием их форм и значительным диапазоном изменений значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМН-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Сложные ФМН-сигналы позволяют применить новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять эти сигналы среди других сигналов и помех, действующих в той же полосе частот и в те же промежутки времени.
Предлагаемые технические решения обеспечивают упрощение реализации измерения скорости транспортных средств с одновременной их идентификацией за счет обеспечения возможности в рамках одного радиоопроса осуществить и обнаружение, и идентификацию, и измерение скорости движения, и сторону движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2492523C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444452C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| СПОСОБ КОНТРОЛЯ ПОДЛИННОСТИ И ПЕРЕМЕЩЕНИЯ АЛКОГОЛЬНОЙ ПРОДУКЦИИ | 2010 |
|
RU2439696C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2254245C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2447513C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2402787C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2388629C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СУБЪЕКТА НА ОБСЛУЖИВАЕМОМ ОБЪЕКТЕ | 2010 |
|
RU2434108C1 |
Изобретение относится к способу обнаружения, идентификации и определения скорости движения транспортного средства. Зондирующий радиосигнал излучают в направлении транспортного средства, принимают ответный сигнал и определяют скорость путем измерения доплеровского смещения частоты. Для этого на транспортном средстве устанавливают узел ответного сигнала, с помощью которого формируют и излучают ответный сигнал транспортного средства. Этот узел содержит информацию о данном транспортном средстве. После приема ответного сигнала выделяют из него информацию о транспортном средстве и формируют сигналы, соответствующие идентификационному номеру транспортного средства и скорости его движения. В качестве узла ответного сигнала используют пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн. Встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набором отражателей. Достигается повышение достоверности обнаружения и идентификации транспортных средств. 3 ил.
Способ обнаружения, идентификации и определения скорости движения транспортного средства, заключающийся в излучении зондирующего радиосигнала в направлении транспортного средства, приеме ответного сигнала и определении скорости путем измерения доплеровского смещения частоты ответного сигнала, при этом устанавливают на транспортном средстве узел ответного сигнала, с помощью которого формируют и излучают ответный сигнал транспортного средства, содержащий информацию о данном транспортном средстве, после приема ответного сигнала выделяют из него информацию о транспортном средстве и формируют сигналы, соответствующие идентификационному номеру транспортного средства и скорости его движения, отличающийся тем, что в качестве узла ответного сигнала используют пьезокристалл с нанесенным на его поверхность тонкопленочным алюминиевым встречно-штыревым преобразователем поверхностных акустических волн, состоящим из двух гребенчатых систем электродов, соединенных между собой шинами, связанными с микрополосковой приемопередающей антенной, и набором отражателей, принимают зондирующий радиосигнал микрополосковой передающей антенной, преобразуют его с помощью встречно-штыревого преобразователя в акустическую волну, обеспечивают ее распространение по поверхности пьезокристалла и обратное отражение, преобразуют с помощью встречно-штыревого преобразователя в ответный сигнал с фазовой манипуляцией, внутренняя структура которого соответствует идентификационному номеру транспортного средства, который является номером его государственной регистрации, излучают его в эфир, улавливают приемопередающей антенной измерительного узла, выделяют сложный сигнал с фазовой манипуляцией, измеряют ширину его спектра и ширину спектра его второй гармоники, сравнивают их между собой и в случае их различия формируют напряжение, которое сравнивают с пороговым напряжением, в случае его превышения принимают решение об обнаружении сложного сигнала с фазовой манипуляцией, осуществляют его синхронное детектирование с использованием зондирующего радиосигнала, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру транспортного средства, выделяют вторую гармонику ответного сигнала, делят ее фазу на два, выделяют ответный сигнал на несущей частоте, перемножают его с зондирующим радиосигналом, выделяют напряжение доплеровского смещения частоты ответного сигнала и измеряют его.
| СПОСОБ ОБНАРУЖЕНИЯ, ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2422909C1 |
| УСТРОЙСТВО ДЛЯ МАРКИРОВКИ | 2005 |
|
RU2290697C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2262707C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2009 |
|
RU2411532C1 |
| Подвижная радиостанция Жирнова | 1984 |
|
SU1229971A1 |

