ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к приводным устройствам, более конкретно к редукторному электродвигателю (мотор-редуктору). Предлагаемое изобретение применимо в машиностроении, в частности в качестве привода для звеньев робототехнических устройств, элементов управления гидравлических систем, исполнительных механизмов, а также в области приборостроения.
УРОВЕНЬ ТЕХНИКИ
Использование редукторных электродвигателей получило широкое распространение в промышленности. Создание современных машин и приборов требует использования редукторных электродвигателей, отвечающих самым высоким требованиям эффективности, точности надежности и экономичности. Некоторые отрасли, такие как приборостроение и роботостроение, особенно остро нуждаются в высокоточных роторных электродвигателях, имеющих малые габаритные размеры и длительный срок службы.
Из патентного источника US 4620796 (индекс МПК A47J 43/04) известен редукторный электродвигатель бытового миксера. Указанный электродвигатель содержит привод, который имеет выходной вал с установленным на нем зубчатым колесом, соединенным с двумя другими зубчатыми колесами, установленными последовательно друг за другом с образованием рядного редуктора. Вращение выходного вала через зубчатые колеса передается на барабан, удерживающий насадку миксера. Недостатком такого редукторного электродвигателя являются большие габаритные размеры, малый срок службы, малое передаточное число и большие потери на трение.
Из патентного источника US 5631511 (индекс МПК F16H 1/32) известен двухскоростной редукторный электродвигатель. Указанный электродвигатель содержит корпус, статор, размещенный в указанном корпусе, и полый ротор, установленный с возможностью вращения в статоре и соединенный с фланцем. Фланец соединен с редуктором, образованным последовательно размещенными друг за другом зубчатыми колесами (рядный редуктор), а также первой электромагнитной муфтой, приводная часть которой соединена с выходным валом роторного электродвигателя. Вторая электромагнитная муфта соединена непосредственно с указанным выходным валом. Недостатками такого редукторного электродвигателя является низкая надежность и низкая несущая способность, а также малое передаточное число и большие потери на трение в зацеплении зубчатых колес.
Из патентного источника SU 1754990 (индекс МПК F16H 1/48) известен редукторный электродвигатель для использования в следящих электроприводах изделий авиационной техники, который имеет корпус с уставленным в нем электродвигателем и редуктором. Указанный редуктор выполнен в виде планетарного редуктора типа 2K-Н. Электродвигатель содержит статор, неподвижно соединенный с корпусом, и ротор, который установлен на ступице с возможностью вращения относительно статора. На указанной ступице выполнено центральное (солнечное) колесо планетарного редуктора. Планетарный редуктор также содержит внешнее зубчатое колесо, неподвижно установленное в корпусе электродвигателя, и сателлиты, установленные с возможностью вращения относительно центрального (солнечного) колеса и внешнего колеса планетарного редуктора. Кроме того, планетарный редуктор содержит водило, соединенное с сателлитами с возможностью передачи их вращения на выходной вал редукторного электродвигателя. К недостаткам указанного редукторного электродвигателя относятся малый срок службы и малая несущая способность. Кроме того, указанный электродвигатель имеет высокий уровень шума при работе.
Наиболее близким аналогом к заявляемому редукторному электродвигателю является редукторный электродвигатель выходного поворотного устройства, производимого компанией Nabtesco Corporation (JP), в соответствии с патентным источником US 7988581 (индекс МПК F16H 1/32). Указанный электродвигатель содержит корпус, а также мотор и планетарно-цевочный редуктор (редуктор типа K-H-V). Вал мотора через систему зубчатых колес соединен с эксцентриковым входным валом редуктора с возможностью передачи вращения. На эксцентриковом валу с примыканием друг к другу установлены сателлиты. При вращении эксцентрикового вала сателлиты совершают плоскопараллельное движение и вступают во взаимодействие цилиндрическими поверхностями своих радиально расположенных отверстий с пальцами, которые обеспечивают передачу крутящего момента от сателлитов выходному валу редуктора. Таким образом, обеспечивается вращение выходного звена поворотного устройства с пониженной скоростью. Однако такой редукторный электродвигатель также не лишен недостатков, среди которых низкая надежность и большие габаритные размеры. Кроме того, изготовление эксцентрикового вала осуществляется сложным многоэтапным способом с применением высокоточного оборудования, что повышает сложность изготовления такого редукторного электродвигателя.
Таким образом, существует потребность в редукторном электродвигателе, который прост в изготовлении, имеет компактные размеры и обеспечивает большое передаточное число.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание надежного редукторного электродвигателя с высокой несущей способностью, плавностью хода, а также с высокой точностью позиционирования или поворота.
Указанная задача решена предлагаемым редукторным электродвигателем, который содержит корпус, статор, который неподвижно установлен в указанном корпусе, ротор, который с возможностью вращения установлен в указанном корпусе, и редуктор, который размещен в указанном корпусе с возможностью передачи вращения от ротора на выходной вал. В предлагаемом электродвигателе ротор имеет по меньшей мере два эксцентриковых цилиндрических участка, а редуктор содержит по меньшей мере два сателлита, которые установлены на указанных эксцентриковых участках ротора с возможностью вращения и в которых выполнены сквозные отверстия сателлитов, по меньшей мере два цевочных колеса, которые неподвижно установлены в корпусе с возможностью взаимодействия с сателлитами, несущие пальцы, которые проходят через указанные отверстия сателлитов и установлены в этих отверстиях с возможностью перекатываться по их внутренней поверхности и передавать усилия от сателлитов, и вал редуктора, который установлен в корпусе с возможностью вращения и образует неподвижное соединение с указанными несущими пальцами. В предлагаемом электродвигателе ротор установлен на валу редуктора с возможностью вращения относительно этого вала, а указанные эксцентриковые цилиндрические участки ротора выполнены соосными. Технический результат, достигаемый предлагаемым редукторным электродвигателем, заключается в упрощении конструкции и повышении механического коэффициента полезного действия. Кроме того, предлагаемый электродвигатель обеспечивает большой ряд передаточных чисел редуктора и плавный ход выходного вала с высокой точностью его позиционирования или поворота.
Согласно одному из частных вариантов реализации сателлиты редуктора установлены на концах ротора. Расположение сателлитов на концах ротора позволяет дополнительно уменьшить диаметральный размер электродвигателя и сделать его более компактным.
Согласно другому частному варианту реализации выходной вал редуктора выполнен полым и имеет внутреннюю резьбу. Профиль резьбы может быть специальным, трапецеидальным или треугольным. Выполнение выходного вала полым обеспечивает возможность размещения внутри вала электрического кабеля, пневматических или гидравлических линий для передачи со стационарной части изделия на поворотную, а выполнение внутренней резьбы позволяет соединить предлагаемый редукторный электродвигатель с ролико-винтовой передачей и интегрировать их в изделие для обеспечения преобразования вращательного движения выходного вала электродвигателя в поступательное движение выходного звена ролико-винтовой передачи без увеличения габаритов такого изделия в осевом направлении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее приведен один из предпочтительных вариантов реализации настоящего изобретения, причем для наглядности описание такого варианта имеет ссылки на сопроводительные чертежи, на которых:
фиг. 1 показывает главный вид в разрезе одного из вариантов реализации предлагаемого электродвигателя с указанием основных составных частей, и
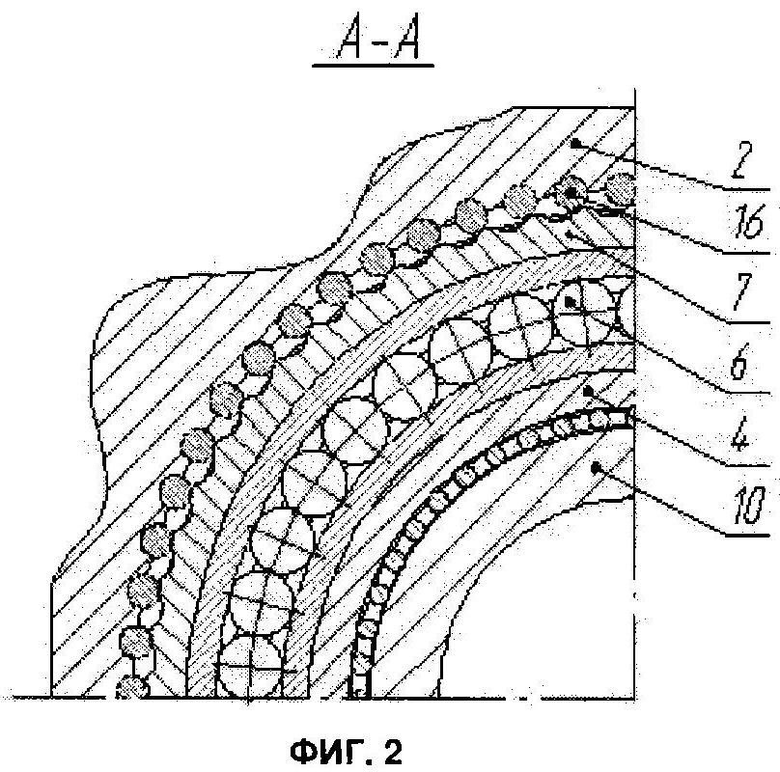
фиг. 2 показывает четверть вида в разрезе по линии А-А, показанной на фиг. 1.
Изображения, приведенные на чертежах, выполнены в масштабе, вследствие чего соотношения размеров приведенных деталей достоверно воспроизведены.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Согласно одному из предпочтительных вариантов реализации, редукторный электродвигатель 1 содержит корпус 2, статор 3, который установлен в корпусе 2 с использованием клеевого соединения, ротор 4, который с возможностью вращения размещен в статоре 3. По периметру центральной части ротора 4 размещены постоянные магниты М. Корпус 2 выполнен из отдельных участков, соединенных между собой с образованием единой конструкции. Электродвигатель 1 также содержит планетарно-цевочный редуктор, входным валом которого является ротор 4. Ротор 4 представляет собой полый вал с выполненными на концах соосными эксцентрическими участками 5. На эксцентрических участках 5 размещены подшипники 6, на которых установлены сателлиты 7. При таком выполнении эксцентрических участков 5 сателлиты 7 оказываются расположенными на расстоянии друг от друга, образуя пространство для установки статора 3. Таким образом обеспечена возможность компактного расположения статора 3 электродвигателя 1 и уменьшения его поперечного (диаметрального) размера. Особенность выполнения сателлитов 7 заключается в том, что они имеют цилиндрическую полость диаметром сопоставимым с диаметром самого сателлита, в которой установлены подшипники 6. Таким образом обеспечивается возможность установки более долговечных подшипников большего размера без увеличения поперечного габаритного размера корпуса 2. Установка подшипников большего размера позволяет увеличить несущую способность и долговечность электродвигателя 1. Кроме того, использование двух соосных эксцентрических участков 5 существенно снижает вибрацию при работе электродвигателя 1, поскольку позволяет избежать образования пары центробежных противоположно направленных сил и как следствие неуравновешенного момента такой пары сил. Соосность участков 5 позволяет упростить изготовление ротора 4, поскольку изготовление таких участков может быть осуществлено за одну технологическую операцию.
Выходной вал 10 электродвигателя установлен в подшипниках 8, 9, которые обеспечивают возможность вращения вала 10 относительно корпуса 2. Ротор 4 установлен на валу 10 в подшипниках 11, что обеспечивает возможность взаимного вращения ротора 4 и выходного вала 10. Подшипники 11 для дополнительного сокращения диаметрального габаритного размера электродвигателя 1 могут быть выполнены в виде игольчатых подшипников. Для облегчения конструкции выходной вал 10 выполнен полым, при этом в полости выходного вала 10 могут транзитом проходить электрические кабели пневмо- или гидролинии (не показаны). На выходном валу 10 неподвижно установлены фланцы 12 с закрепленными в них цилиндрическими пальцами 13 редуктора. Пальцы 13 расположены по окружности и взаимодействуют с сателлитами 7, в частности проходят в цилиндрические отверстия сателлитов 7 с возможностью переката по внутренней поверхности этих отверстий. Корпус 2 имеет цилиндрические участки 14, 15, в которых выполнены выемки под цевки 16, образующие цевочное колесо планетарно-цевочного редуктора электродвигателя 1. Электродвигатель 1 также содержит участки 18, 19 корпуса 2, в котрых установлены подшипники 8, 9 выходного вала 10, указанные участки 18, 19 прикрепляются к участкам 14, 15 корпуса 2. Подшипники 8, 9 на выходном валу 10 фиксируют от осевого перемещения гайками 24. Электродвигатель 1 также содержит крышки 26, 27. В крышках 26, 27 и на выходном валу 10 имеются посадочные поверхности под уплотнения 30. Уплотнения 30 позволяют герметизировать внутреннее пространство электродвигателя 1, исключая попадание в него жидкостей, грязи и пыли. В некоторых случаях, при использовании подходящего уплотнения, электродвигатель 1 может работать под водой. Элементы корпуса 2 стягиваются между собой винтами и шпильками, центрируются между собой по диаметру, а их взаимное угловое расположение друг относительно друга обеспечивается центрирующими пальцами (не показаны). Выходной вал 10 имеет внутренние шлицы (не показаны), на которых установлен шкив 31 для крепления к приводимому электродвигателем 1 в движение внешнему устройству. Согласно другим вариантам реализации, выходной конец вала 10 может быть сплошным или пустотелым, может иметь шпонку, шлицы, а также может иметь квадратное поперечное сечение или шестигранное поперечное сечение. Указанная форма выходного конца может быть любой, и ее особенности определяются лишь ответной соединительной частью приводимого электродвигателем 1 в движение внешнего устройства.
Предлагаемый электродвигатель работает следующим образом.
На обмотки статора 3 по электрическим кабелям подают электрический ток, в результате чего формируется вращающееся магнитное поле статора. Это вращение приводит к соответствующему вращению ротора 4, магнитное поле которого устремляется за вращающимся магнитным полем статора. Вращение ротора 4 приводит к перемещению сателлитов 7. Сателлиты 7 перекатываются по цевочному колесу, образованному цевками 16, и совершают плоскопараллельное перемещение. При перекатывании сателлитов 7 по цевочному колесу их внутренние цилиндрические поверхности передают усилие цилиндрическим поверхностями пальцев 13. Такая передача усилия приводит к вращению пальцев 13 и неподвижно соединенного с ними вала 10 вокруг центральной оси указанного вала. Таким образом, вращение ротора 4 через сателлиты 7 и пальцы 13 передается на выходной вал 10. На выходном валу 10 может быть установлено входное звено другого устройства, например гайка ролико-винтовой передачи, для чего на внутренней поверхности вала 10 может быть выполнена резьба, так что вращение вала 10 может затем быть преобразовано в поступательное перемещение.
Предлагаемый электродвигатель обладает высоким КПД, имеет компактную конструкцию, высокую точность позиционирования или поворота выходного вала и длительный срок службы. Предлагаемый электродвигатель также имеет более выгодные экономические характеристики, поскольку при достаточно высоком КПД обеспечено снижение себестоимости, что достигнуто за счет интеграции статора и ротора в корпус электродвигателя, исключения дополнительных подшипников ротора, соединительной муфты и снижения общего количества деталей, а также за счет конструктивного упрощения и снижения требований к точности изготовления деталей входящих в электродвигатель.
В заключение следует отметить, что приведенный вариант реализации не описывает всех возможных вариантов выполнения предлагаемого электродвигателя, а испрашиваемый объем правовой охраны ограничен исключительно прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
| МОТОР-КОЛЕСО НА БАЗЕ ЦИКЛОИДАЛЬНОГО (ПЛАНЕТАРНО-ЦЕВОЧНОГО) РЕДУКТОРА | 2016 |
|
RU2665017C2 |
| ЭЛЕКТРОМОТОР-КОЛЕСО | 1995 |
|
RU2098694C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ЭЛЕКТРОМОТОР-КОЛЕСО | 2010 |
|
RU2446061C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| СИСТЕМА С МОТОР-РЕДУКТОРОМ ДЛЯ ДВУХКОЛЕСНЫХ ИЛИ ТРЕХКОЛЕСНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, УСТАНАВЛИВАЕМАЯ СООСНО С КАРЕТКОЙ ТРАНСПОРТНОГО СРЕДСТВА, И ТРАНСПОРТНОЕ СРЕДСТВО С ТАКОЙ СИСТЕМОЙ | 2014 |
|
RU2705508C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2006 |
|
RU2327914C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
Изобретение относится к приводным устройствам, а именно к редукторному электродвигателю (мотор-редуктору). Электродвигатель содержит корпус, в котором размещены статор, ротор и планетарно-цевочный редуктор. Ротор электродвигателя представляет собой входной вал редуктора, на концах которого сформированы два соосных эксцентрических участка. На указанных участках установлены сателлиты редуктора, при этом пространство между сателлитами использовано для размещения статора. Предлагаемый электродвигатель имеет высокий коэффициент полезного действия, обладает небольшими габаритными размерами, высокой несущей способностью и долговечностью, а также имеет высокую точность позиционирования или поворота выходного вала. 3 з.п. ф-лы, 2 ил.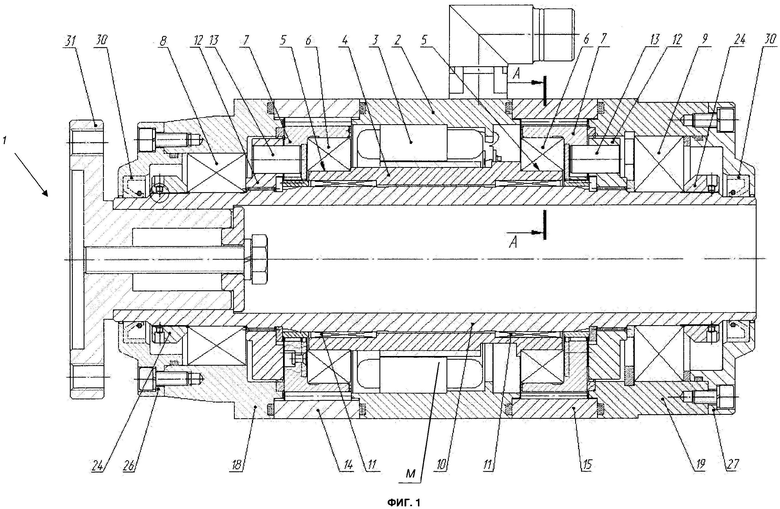
1. Редукторный электродвигатель, который содержит
корпус электродвигателя,
статор, который неподвижно установлен в указанном корпусе,
ротор, который с возможностью вращения установлен в статоре,
редуктор, который размещен в указанном корпусе с возможностью передачи вращения ротора, причем
ротор имеет по меньшей мере два эксцентриковых цилиндрических участка,
а редуктор содержит
по меньшей мере два сателлита, которые установлены на указанных эксцентриковых участках ротора с возможностью вращения и в которых выполнены сквозные отверстия сателлитов,
по меньшей мере два цевочных колеса, которые неподвижно установлены в корпусе во взаимодействии с сателлитами,
несущие пальцы, которые проходят через указанные отверстия сателлитов и установлены в этих отверстиях с возможностью переката по их внутренней поверхности и с возможностью передачи усилия от сателлитов, и
вал редуктора, который установлен в корпусе с возможностью вращения и образует неподвижное соединение с указанными несущими пальцами,
причем ротор установлен на валу редуктора с возможностью вращения относительно этого вала, а указанные эксцентриковые цилиндрические участки ротора выполнены соосными.
2. Электродвигатель по п.1, в котором указанные сателлиты установлены на концах ротора.
3. Электродвигатель по п.1, в котором вал редуктора выполнен полым и имеет внутреннюю резьбу.
4. Электродвигатель по п.3, в котором указанная внутренняя резьба имеет специальный, трапецеидальный или треугольный профиль.
| US 7988581 B2, 02.08.2011 | |||
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР | 2005 |
|
RU2294587C1 |
| МОТОР-РЕДУКТОР | 1994 |
|
RU2074490C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОПРИВОДОВ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - МКЭ ПЦР | 2008 |
|
RU2452883C2 |
| US 4406340 A, 27.09.1983. | |||

