Изобретение относится к устройствам перемещений и может быть использовано для приведения в движение различных устройств, работающих в условиях открытого космоса и экстремальных температурных условиях.
Известен электромотор-колесо, содержащий электродвигатель, планетарный редуктор в виде 2К-Н-механизма и ступицу колеса [1].
Существенным недостатком известного электромотор-колеса является ограничение 1500÷2500 об/мин максимальных значений скоростей вращения электродвигателя, обусловленное возникающими при больших скоростях вращения значительными динамическими составляющими нагрузки в зацеплении, и малое передаточное отношение, реализуемое в одной ступени планетарного редуктора. В совокупности это обусловливает большие массогабаритные параметры электромотор-колеса. Кроме того, вследствие необходимости создания хороших условий смазки значительного числа высоконагруженных трущихся сопряжений данная конструкция не может быть использована в условиях открытого космоса.
Из известных наиболее близким по технической сущности к предлагаемому является выбранный в качестве прототипа электромотор-колесо [2], содержащий корпус, электродвигатель и планетарный редуктор с цевочным зацеплением, включающий жестко соединенное со статором электродвигателя водило с эксцентриковыми валами, на шейках которых размещены эпициклоидные сателлиты, введенное в зацепление с последними цевочное колесо, установленное посредством подшипников на водиле, и ступицу колеса, электромотор-колесо снабжен центральным валом-шестерней, жестко соединенным с ротором электродвигателя, установленным в подшипниках крышек водила и введенным в зацепление с эвольвентными сателлитами, расположенными на коренных шейках эксцентриковых валов, а также снабжен обгонной муфтой, внутренняя звездочка которой выполнена на части внешней поверхности цевочного колеса, наружная обойма совмещена со ступицей колеса, ролики расположены в гнездах сепаратора, фрикционно связанного с водилом, а между цевочным колесом и ступицей колеса расположены подшипники.
Существенными недостатками этого технического решения являются:
- ограниченное значением 60÷80 передаточное отношение, реализуемое в одной ступени планетарного редуктора, малая удельная мощность (кВт/кг) электромотор-колеса, обусловленная ограниченными 150÷200 рад/с оборотами электродвигателя и значительной массой редуктора, что в совокупности сужает область его применения в устройствах с повышенными требованиями к массогабаритным параметрам, например, работающих в аэрокосмической технике;
- невозможность работы в условиях открытого космоса и при температурах более 350-370 К, связанная с необходимостью создания хороших условий смазки значительного числа высоконагруженных трущихся сопряжений данной конструкции.
Задачей изобретения является увеличение удельной мощности электромотор-колеса и расширение функциональных возможностей его использования в экстремальных температурных условиях (до 450 К) и открытом космосе.
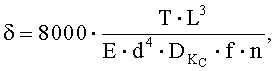
Поставленная цель достигается тем, что в электромотор-колесе, содержащем корпус, электродвигатель с ротором, имеющим наружную цилиндрическую поверхность, и статором и планетарный редуктор, включающий по меньшей мере три сателлита, установленных равномерно по окружности с возможностью вращения вокруг своей оси в окружном направлении, колесо, установленное с возможностью взаимодействия с сателлитами, согласно техническому решению каждый из сателлитов выполнен в виде трех установленных на одной оси и соединенных между собой предварительно упругодеформированными упругоподатливыми валами колес с наружными фрикционными рабочими поверхностями, а на наружной поверхности ротора размещена неразъемно соединенная с ним втулка с кольцевым элементом, имеющим цилиндрическую наружную фрикционную рабочую поверхность, установленную с возможностью взаимодействия с наружной фрикционной рабочей поверхностью среднего колеса каждого из сателлитов, статор электродвигателя размещен внутри ротора, при этом корпус электромотор-колеса выполнен из двух частей, одна из которых жестко связана со статором, другая установлена с возможностью вращения, при этом на их внутренних поверхностях расположены неразъемно связанные с ними кольцевые элементы с внутренними фрикционными рабочими поверхностями, установленные с возможностью взаимодействия с ответными наружными фрикционными рабочими поверхностями размещенных со стороны торцов колес каждого из сателлитов, при этом величина δ (мм) предварительной упругой деформации упругоподатливых валов каждого из сателлитов составляет

где Т - максимальный момент, создаваемый электромотор-колесом, Н·м;
L - длина упругоподатливого вала сателлита, мм;
Е - модуль упругости материла упругоподатливого вала сателлита, МПа;
d - диаметр упругоподатливого вала сателлита, мм;
 - расчетное среднее значение диаметров внутренних фрикционных рабочих поверхностей кольцевых элементов на соответственно неподвижной и подвижной частях корпуса, определяемое из конструктивных параметров электромотор-колеса, мм;
- расчетное среднее значение диаметров внутренних фрикционных рабочих поверхностей кольцевых элементов на соответственно неподвижной и подвижной частях корпуса, определяемое из конструктивных параметров электромотор-колеса, мм;
f - коэффициент трения скольжения в соединениях фрикционных рабочих поверхностей колес сателлита и кольцевых элементов корпуса и втулки ротора;
n - число сателлитов.
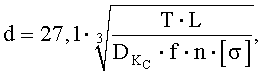
В электромотор-колесе колеса каждого из сателлитов выполнены с бочкообразной наружной рабочей поверхностью, ответные им внутренние рабочие поверхности кольцевых элементов корпуса - торроидальными, а упругоподатливые валы каждого из сателлитов выполнены диаметром d, выбираемым из соотношения

где [σ] - допустимые напряжения при изгибе упругоподатливых валов сателлитов, МПа,
при этом на каждой из частей корпуса выполнены по меньшей мере два кольцевых элемента с внутренними фрикционными рабочими поверхностями, каждый из которых установлен с возможностью взаимодействия с колесами по меньшей мере трех сателлитов.
В предлагаемом техническом решении повышение удельной мощности и обеспечение возможности использования электромотор-колеса в экстремальных температурных условиях (до 450 К) и открытом космосе достигается в результате следующего:
- передача крутящего момента от двигателя к вращающейся части корпуса осуществляется не зацеплением, а посредством фрикционного взаимодействия соответствующих рабочих поверхностей колес сателлитов и кольцевых элементов;
- положение оси ротора фиксируется относительно оси статора в пространстве непосредственно сателлитами, упругоподатливые валы которых предварительно упругодеформированы, что позволяет исключить из конструкции подшипники качения, радиальные и окружные зазоры и люфты и в совокупности обеспечить высокую плавность функционирования взаимодействующих элементов, что в сочетании с применением легких алюминиевых сплавов при изготовлении втулки, колес сателлитов, корпуса и кольцевых элементов позволяет увеличить скорость вращения двигателя до 8-20 тыс. оборотов в минуту и за счет этого уменьшить его массу и габариты в 4-5 и более раз, причем в конструкции могут быть использованы не только 3, но и существенно большее (6-18) число сателлитов, что в совокупности позволяет повысить удельную (кВт/кг) мощность электромотор-колеса;
- размещение ротора электродвигателя внутри жестко связанной с ним втулки, а также размещение статора внутри вращающегося ротора позволяет уменьшить радиальные размеры конструкции при повышении эффективности создания магнитных полей;
- выполнение расположенных со стороны торцов сателлита колес с бочкообразной наружной рабочей поверхностью, а ответных им внутренних рабочих поверхностей кольцевых элементов корпуса тороидальными позволяет обеспечить допустимые контактные давления при меньших радиусах и габаритных размерах колес сателлита и корпуса, причем обеспечение рациональных значений радиусов r и R (r - радиус сферы, в которую «вписаны» прилегающие к торцам колеса сателлитов, R - радиус кривизны кольцевых элементов на корпусе в осевом сечении электромотор-колеса, R>r) позволяет сохранить передаточное отношение при деформациях осей и связанных с этим смещениях взаимодействующих элементов передачи, причем в качестве дополнительного эффекта достигается надежное крепление подвижных компонентов системы друг относительно друга в осевом направлении.
Зависимость для определения значения предварительной упругой деформации δ упругоподатливых валов сателлитов получена с использованием известных зависимостей (см., например, Дарков А.В., Шпиро Г.С. Сопротивление материалов: Учеб. для техн. вузов. - 5-е изд., перераб. и доп. - М.: Высш. шк., 1989. - 624 с.; стр.266-270).
Упругоподатливые валы сателлитов могут быть рассмотрены как консольно закрепленные (на среднем колесе сателлита) балки с круглым сечением диаметром d, нагруженные на конце сосредоточенной нагрузкой Р, обуславливающие ее деформацию на величину δ, где

Поскольку величина наибольших изгибных напряжений в круглых упругоподатливых валах сателлитов может быть определена из зависимости

где W - момент сопротивления сечения упругоподатливого вала сателлита,
то из условий прочности и обеспечения заданного усилия прижатия рабочих поверхностей


где J - момент инерции круглого сечения упругоподатливых валов сателлитов, J≈0,05d4, мм4;
Е - модуль упругости материала упругоподатливых валов сателлитов, МПа.
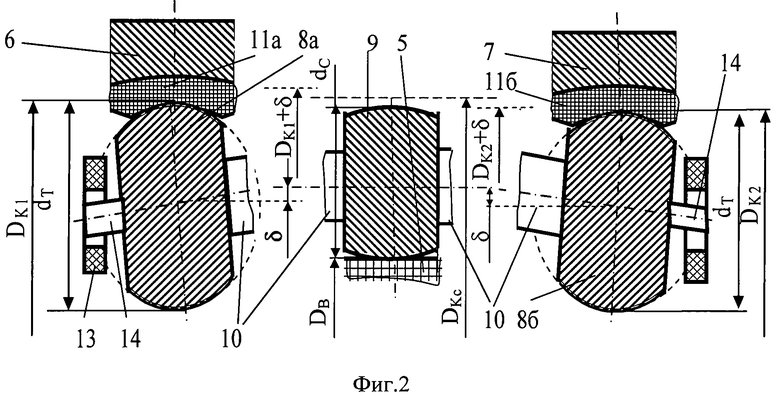
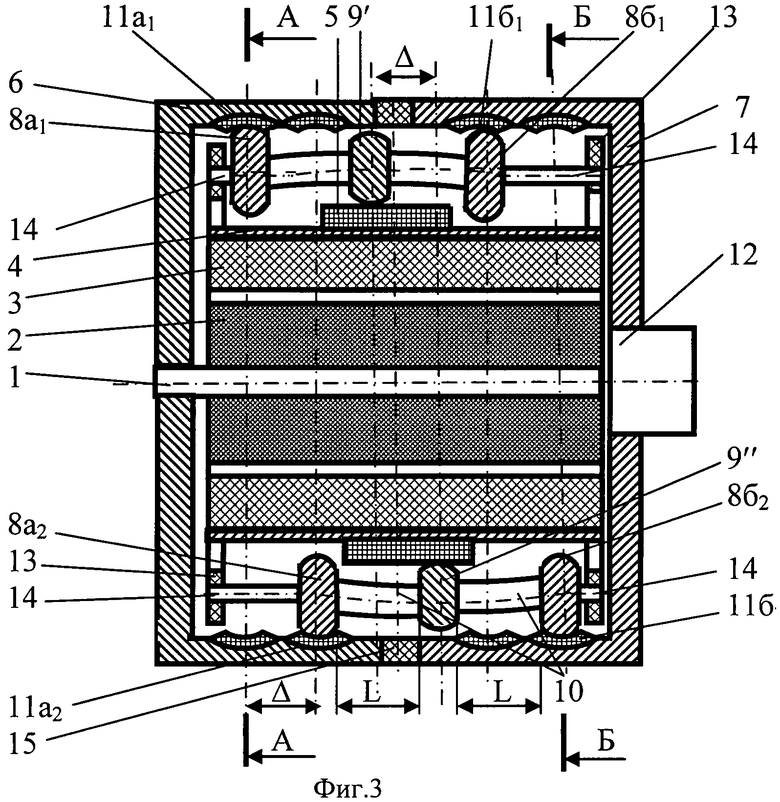
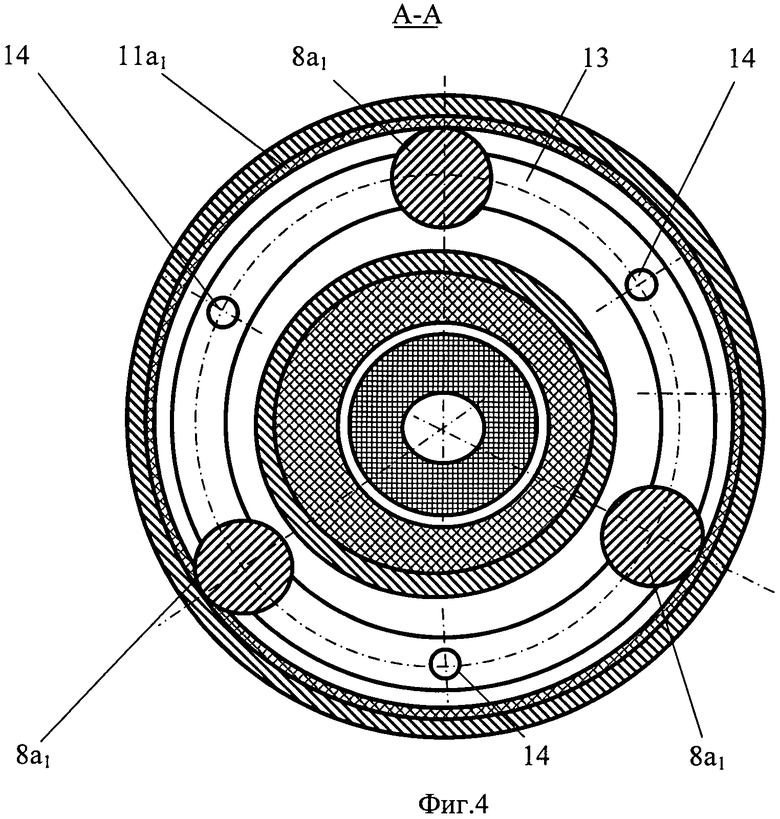
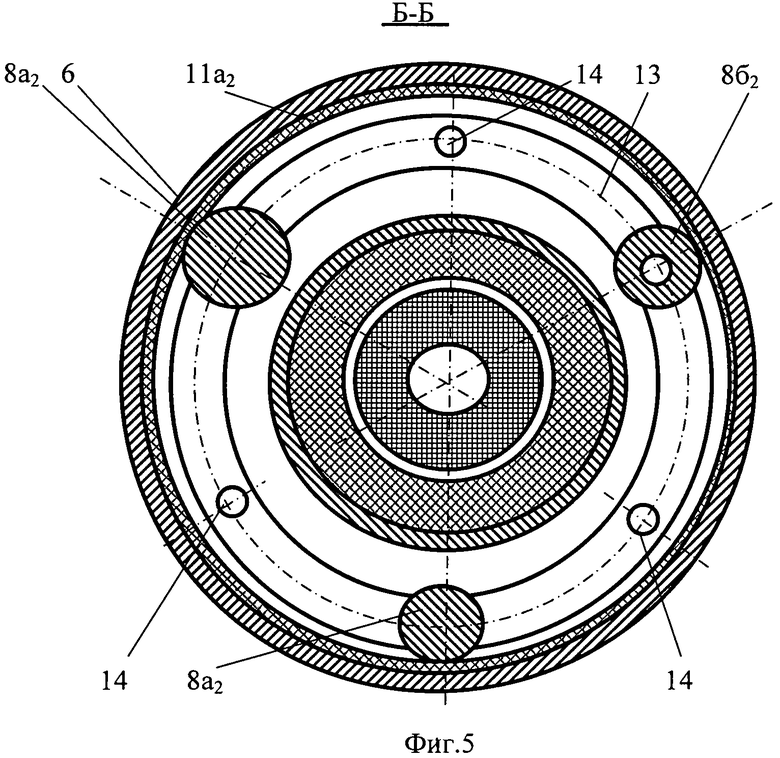
На фиг.1 представлен электромотор-колесо; на фиг.2 - увеличенный вид зоны взаимодействия колес сателлитов с кольцевыми элементами корпуса и втулки ротора; на фиг.3 - электромотор-колесо с двумя кольцевыми элементами на каждой из частей корпуса; на фиг.4 и 5 - сечения соответственно А-А и Б-Б фиг.3.
Электромотор-колесо содержит (фиг.1) ось 1, связанную с основанием (не показано), на которой неразъемно крепится статор 2 электродвигаля. Ротор 3 выполнен в виде полого цилиндра, внутри которого размещен статор 2. На роторе 3 размещена неразъемно соединенная с ним втулка 4 с кольцевым элементом 5. Кольцевой элемент 5 имеет цилиндрическую наружную фрикционную рабочую поверхность (не показана) диаметром DB.
Корпус электромотор-колеса состоит из двух частей, одна из которых 6 жестко связана с осью 1, другая 7 установлена с возможностью вращения. Каждый из сателлитов передачи (фиг.1) выполнен в виде трех расположенных на одной оси колес:
- колес 8а и 8б, расположенных со стороны торцов сателлита, имеющих бочкообразные (вписывающиеся в сферическую поверхность диаметром dT) наружные фрикционные рабочие поверхности;
- среднего колеса 9, установленного с возможностью взаимодействия с предварительным нагружением по нормали к поверхности контакта с наружной цилиндрической фрикционной рабочей поверхностью кольцевого элемента 5, обусловленным упругой деформацией упругоподатливых валов 10;
- жестко связывающих колесо 9 с колесами 8а и 8б упругоподатливых валов 10, имеющих длину L, диаметр d и выполненных, например, из пружинной стали.
На внутренней поверхности частей 6 и 7 корпуса размещены кольцевые элементы 11а и 11б, имеющие внутренние фрикционные рабочие поверхности, тороидальный профиль этих поверхностей выполнен с радиусом, большим 0,5dT в осевом сечении, и установленные с возможностью взаимодействия с наружными фрикционными рабочими поверхностями соответственно колес 8а и 8б с предварительным нагружением по нормали к поверхности контакта.
Внутренние фрикционные рабочие поверхности (не показаны) кольцевых элементов 11а и 11б наружные фрикционные рабочие поверхности (не показаны) колес 8а, 8б, 9 и кольцевого элемента 5 имеют коэффициент трения f≥0,6, обеспечиваемый, например, покрытием Al2O3 толщиной 70÷100 мкм, сформированным, например, анодно-катодной микродуговой обработкой на частях корпуса 6 и 7, колесах 8а, 8б, 9 и кольцевом элементе 5, которые выполнены из алюминиевых сплавов.
Тороидальные поверхности кольцевых элементов 11а и 11б имеют максимальный диаметр DK1. и DK2, величина которых определяется исходя из следующего.
При повороте ротора 3 и жестко связанных с ним втулки 4 и кольцевого элемента 5 с диаметром DB на один оборот число оборотов N имеющего диаметр dC среднего колеса 9 каждого из сателлитов и каждого сателлита в целом составляет
При этом длины дуг l на поверхности диаметром DK1 связанной с осью 1 неподвижной части корпуса 6 и на поверхности диаметром DK2 связанной с выходным валом подвижной части корпуса 7, описываемые линией контакта размещенных у торцов сателлита колес соответственно 11 а и 11б, составляют

Угол γ поворота (в радианах) подвижной в окружном направлении части 7 корпуса относительно оси 1 электромотор-колеса равен

Поскольку передаточное число u равно
то

или
Поскольку

то

С учетом выражений (15) и (17) величина DKI может быть определена из соотношения


Отсюда (при соблюдении требований к минимизации размеров)


Предварительная упругая деформация (упругоподатливых валов 10 сателлитов, обеспечивающая требуемое для передачи крутящего момента усилие прижатия фрикционных рабочих поверхностей кольцевых элементов 5, 11a, 11б и соответственно колес 8а, 8б, 9 друг к другу у каждого из сателлитов обеспечивается за счет определения значений DK1 и DK2 из зависимостей (16), (17), обеспечивающих упругую деформацию упругоподатливых валов 10 на величину 8 (см. фиг.1). Смещения по радиусам диаметров DK1 и DK2 (см. фиг.2) контактной зоны колес 8а, 8б и соответствующих колец 11а и 11б, возникающие при радиальной деформации упругоподатливых валов 10, столь незначительны, что это практически не приводит к изменению передаточного отношения. Подвижная часть 7 корпуса жестко связана с выходным валом 12.
Электромотор-колесо снабжено сепаратором 13 из антифрикционного материала, имеющего кольцевую форму. В отверстия (не показаны) сепараторов 13 входят с радиальным зазором оси 14 колес 8а и 8б (оси 14 могут быть выполнены за одно целое с упругоподатливыми валами 10).
При необходимости повышения надежности радиального и осевого базирования подвижной части 7 корпуса путем создания дополнительных радиальных опор на частях корпуса 6 и 7 могут быть выполнены по меньшей мере по два смещенных на величину Δ друг относительно друга в осевом направлении кольцевых элемента 11а1, 11а2 (на части 6 корпуса) и 11б1, 11б2 (на подвижной в окружном направлении части 7 корпуса), имеющие внутренние фрикционные рабочие поверхности (фиг.3).
В этом случае в электромотор-колесе размещается дополнительная группа из по меньшей мере трех равномерно расположенных по окружности сателлитов, колеса которых 8а2 и 8б2 установлены с возможностью взаимодействия с соответствующими кольцевыми элементами 11а2, 11б2, а среднее колесо 9'' - с кольцевым элементом 5. Рабочие фрикционные поверхности кольцевых элементов 11a1 и 11б1 взаимодействуют с рабочими фрикционными поверхностями соответственно колес 8a1 и 8б1 основной группы сателлитов. Среднее колесо 9' (фиг.3) взаимодействует с кольцевым элементом 5. Основная и дополнительная группы сателлитов смещены друг относительно друга в осевом направлении на величину Δ (при создании трех и более групп кольцевых элементов соответственно возрастает число ответных групп сателлитов). Каждая группа состоит из по меньшей мере трех равномерно расположенных по окружности сателлитов, установленных таким образом, чтобы каждый последующий сателлит оказался смещенным в осевом направлении относительно предыдущего на величину Δ (фиг.3-5).
Передачи выполняются с передаточными числами u=500÷1000. Подводка электропитания катушек (не показаны) статора 2 осуществляется через отверстие (не показано) в оси 1. Втулка 4, колеса 8а, 8б, 9, части 6 и 7 корпуса и кольцевые элементы 11а и 11б электромотор-колеса изготавливаются из легких, например алюминиевых, сплавов.
Пример расчета параметров d, δ, DK1 и DK2.
Исходные данные: dC=dT=10 мм; DB=50 мм (определяются конструктивными параметрами двигателя); u=500 (определяется числом соотношения требуемого числа оборотов на выходе и числа оборотов двигателя); Т=80 Н·м; L=20 мм; Е=2,1·105 МПа (материал упругоподатливых валов - пружинная сталь); f=0,9 (коэффициент трения скольжения в соединениях фрикционных рабочих поверхностей с оксидокерамикой на сателлитах и кольцевых элементах втулки водила и корпуса); n=3; [σ]=600 МПа (для расчетного ресурса 10000 часов).
Тогда:







При расчете принято DK1<DK2 (фиг.2) для вращения ротора 3 и выходного вала 12 в одну сторону (в противном случае ротор 3 и выходной вал 12 будет вращаться в противоположные стороны).
Электромотор-колесо работает следующим образом.
Вращение со скоростью ω1 от ротора 3, создаваемое статором 2 электродвигателя, передается через фрикционное сопряжение кольцевого элемента 5 и колеса 9 на упругоподатливые валы 10. От упругоподатливых валов 10 каждого из сателлитов, вращение передается колесам 8а, 8б. Колеса 8а и 8б в результате фрикционного контакта соответственно с кольцевыми элементами 11а и 11б, обкатываясь по их внутренним фрикционным поверхностям без скольжения в результате разности в диаметрах кольцевых элементов 11а и 11б, вращают подвижную часть 7 корпуса с угловой скоростью ω2=ω1/u в прямом (u>0) или обратном (u<0) вращению ротора 3 направлении. Аналогично работает конструкция электромотор-колеса, показанная на фиг.3. При этом наличие нескольких кольцевых элементов (11a1, 11а2 и 11б1, 11б2) обеспечивает надежную фиксацию подвижной части 7 корпуса при воздействии на нее внешних радиальных нагрузок (не показаны).
Использование описанной конструкции электромотор-колеса позволяет увеличить по сравнению с существующими в 2-3 и более раз удельную мощность и обеспечить возможность работы в условиях открытого космоса при температурах до 450 К.
1. Руденко В.Н. Планетарные и волновые передачи. Альбом конструкций. - М: Машиностроение, 1980, с.87, лист 54. 2. Там же, с.88, лист 55, схема "а". (71).
2. Патент RU №2098694, кл. МПК6 F16H 1/32.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОЛИКОВАЯ ТРАНСМИССИЯ | 2010 |
|
RU2442920C1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР | 2005 |
|
RU2294587C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОПРИВОДОВ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - МКЭ ПЦР | 2008 |
|
RU2452883C2 |
| ЭЛЕКТРОМОТОР-КОЛЕСО | 1995 |
|
RU2098694C1 |
| ЭЛЕКТРОПРИВОД С ПЛАНЕТАРНЫМ ЦИКЛОИДАЛЬНЫМ РЕДУКТОРОМ | 2000 |
|
RU2206805C2 |
| Двухступенчатый конический волновой редуктор с электродвигателем | 2021 |
|
RU2771554C1 |
| МУФТА КРИВОШИПНО-ШАТУННОГО ПРЕССА | 2010 |
|
RU2504475C2 |
| ТОРМОЗ КРИВОШИПНОГО ПРЕССА | 2010 |
|
RU2504474C2 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР С ИЗМЕНЯЮЩИМСЯ ЭКСЦЕНТРИСИТЕТОМ ВРАЩЕНИЯ САТЕЛЛИТ-ЯКОРЯ | 2007 |
|
RU2352047C2 |
| ТРАНСМИССИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТА | 2019 |
|
RU2730094C1 |
Изобретение относится к устройствам перемещений и может быть использовано для приведения в движение различных устройств, работающих в условиях открытого космоса и экстремальных температурных условиях. Электромотор-колесо содержит корпус, электродвигатель и планетарный редуктор. Каждый сателлит выполнен в виде трех установленных на одной оси и соединенных между собой предварительно упругодеформированными упругоподатливыми валами (10) колес (8а, 8б, 9). На наружной поверхности ротора (3) электродвигателя размещена втулка (4) с кольцевым элементом (5), имеющим цилиндрическую наружную фрикционную рабочую поверхность, взаимодействующую с наружной фрикционной рабочей поверхностью среднего колеса (9) каждого из сателлитов. Статор (2) электродвигателя размещен внутри ротора (3). Корпус электромотор-колеса выполнен из двух частей (6, 7), из которых одна часть (6) жестко связана со статором (2), другая часть (7) установлена с возможностью вращения. На внутренних поверхностях частей (6, 7) корпуса расположены кольцевые элементы (11а, 11б) с внутренними фрикционными рабочими поверхностями, взаимодействующие с ответными наружными фрикционными рабочими поверхностями колес (8а, 8б) сателлитов. Изобретение позволяет увеличить удельную мощность и обеспечить возможность работы в условиях открытого космоса при температурах до 450 К. 3 з.п. ф-лы, 5 ил.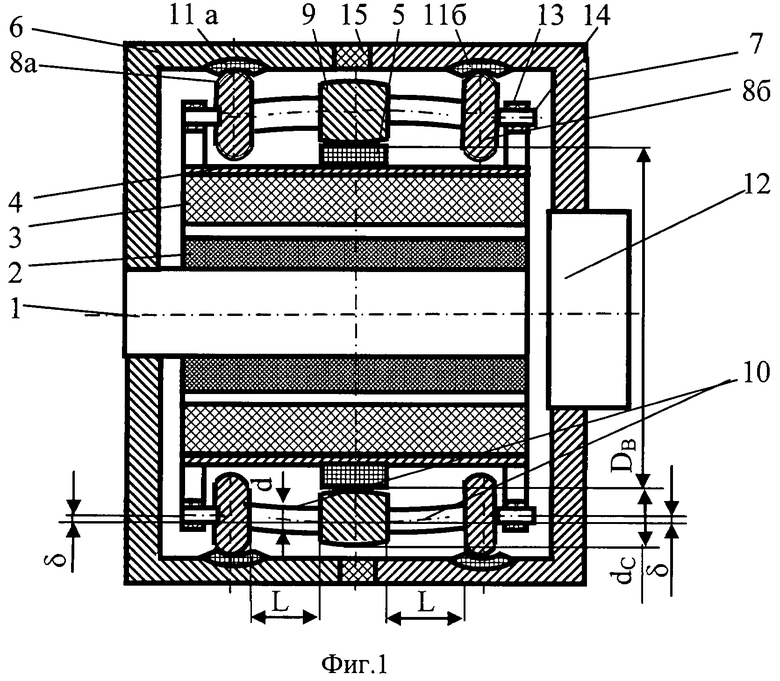
1. Электромотор-колесо, содержащий корпус, электродвигатель с ротором, имеющим наружную цилиндрическую поверхность, и статором и планетарный редуктор, включающий по меньшей мере три сателлита, установленных равномерно по окружности с возможностью вращения вокруг своей оси в окружном направлении, колесо, установленное с возможностью взаимодействия с сателлитами, отличающийся тем, что каждый из сателлитов выполнен в виде трех установленных на одной оси и соединенных между собой предварительно упругодеформированными упругоподатливыми валами колес с наружными фрикционными рабочими поверхностями, а на наружной поверхности ротора размещена неразъемно соединенная с ним втулка с кольцевым элементом, имеющим цилиндрическую наружную фрикционную рабочую поверхность, установленную с возможностью взаимодействия с наружной фрикционной рабочей поверхностью среднего колеса каждого из сателлитов, статор электродвигателя размещен внутри ротора, при этом корпус электромотор-колеса выполнен из двух частей, одна из которых жестко связана со статором, другая установлена с возможностью вращения, при этом на их внутренних поверхностях расположены неразъемно связанные с ними кольцевые элементы с внутренними фрикционными рабочими поверхностями, установленные с возможностью взаимодействия с ответными наружными фрикционными рабочими поверхностями размещенных со стороны торцов колес каждого из сателлитов, при этом величина δ (мм) предварительной упругой деформации упругоподатливых валов каждого из сателлитов составляет
где Т - максимальный момент, создаваемый электромотор-колесом, Нм;
L - длина упругоподатливого вала сателлита, мм;
Е - модуль упругости материла упругоподатливого вала сателлита, МПа;
d - диаметр упругоподатливого вала сателлита, мм;
 - расчетное среднее значение диаметров внутренних фрикционных рабочих поверхностей кольцевых элементов на соответственно неподвижной и подвижной частях корпуса, определяемое из конструктивных параметров электромотор-колеса, мм;
- расчетное среднее значение диаметров внутренних фрикционных рабочих поверхностей кольцевых элементов на соответственно неподвижной и подвижной частях корпуса, определяемое из конструктивных параметров электромотор-колеса, мм;
f - коэффициент трения скольжения в соединениях фрикционных рабочих поверхностей колес сателлита и кольцевых элементов корпуса и втулки ротора;
n - число сателлитов.
2. Электромотор-колесо по п.1, отличающийся тем, что колеса каждого из сателлитов выполнены с бочкообразной наружной рабочей поверхностью, а ответные им внутренние рабочие поверхности кольцевых элементов корпуса - торроидальными.
3. Электромотор-колесо по п.1 или 2, отличающийся тем, что упругоподатливые валы каждого из сателлитов выполнены диаметром d, выбираемым из соотношения
где [σ] - допустимые напряжения при изгибе упругоподатливых валов сателлитов, МПа.
4. Электромотор-колесо по п.1 или 2, отличающийся тем, что на каждой из частей корпуса выполнены по меньшей мере два кольцевых элемента с внутренними фрикционными рабочими поверхностями, каждый из которых установлен с возможностью взаимодействия с колесами по меньшей мере трех сателлитов.
| ЭЛЕКТРОМОТОР-КОЛЕСО | 1995 |
|
RU2098694C1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР С ИЗМЕНЯЮЩИМСЯ ЭКСЦЕНТРИСИТЕТОМ ВРАЩЕНИЯ САТЕЛЛИТ-ЯКОРЯ | 2007 |
|
RU2352047C2 |
| Мотор-колесо транспортного средства | 1980 |
|
SU867706A1 |
| Способ лечения хронического ос-ТЕОМиЕлиТА | 1979 |
|
SU799737A1 |

