ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Приоритет настоящей заявки на патент заявляется по дате подачи Предварительных Заявок на патент США №61/325,061, 61/325,064, 61/325,067 и 61/325,070, поданных 16 апреля 2010 года, а также по дате подачи Предварительной Заявки на патент США №61/366,394, поданной 21 июля 2010. Все содержание каждой из вышеуказанных заявок включено в настоящий документ посредством ссылки.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Наиболее высокопродуктивные открытые разработки угля и железной руды используют процесс цикличности, который включает пробуривание отверстий в поверхности, вставление взрывчатых веществ в отверстия, воспламенение взрывчатых веществ для ослабления материала, выкапывание ослабленного материала и его загрузку в карьерные самосвалы, транспортировку материала в центр дробления и транспортировки и укладку откалиброванного и отсортированного материала в соответствующий отвал. Этот способ использовался в течение более 100 лет и являлся предметом постоянного усовершенствования. Преобладающим способом выкапывания и загрузки угля или железной руды является использование высокопроизводительных гидравлических экскаваторов (также называемых гидравлическими добычными экскаваторами). Преобладающим способом удаления вскрышных пород является использование канатно-скребковых экскаваторов и/или электрических добычных экскаваторов. В последнее время производительность гидравлических добычных экскаваторов увеличилась и теперь примерно равна производительности электрических добычных экскаваторов меньшего размера.
[0003] Еще одно сравнительно недавнее усовершенствование относится к адаптации машины для насечки брусчатки для разработки открытым способом. Эти модифицированные машины для насечки брусчатки, как правило, представляют собой дизельные транспортные средства с водителем и с резальными барабанами с ременным приводом, которые работают в постоянной взаимосвязи с землей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В одном варианте выполнения изобретения предложена система открытой разработки для удаления материала из очистного забоя. Система в целом содержит конвейер, проходящий по существу параллельно очистному забою, выемочный комбайн, поддерживаемый конвейером и выполненный с возможностью перемещения вдоль конвейера, и устройство перемещения конвейера, связанное с конвейером и выполненное с возможностью продвижения конвейера и выемочного комбайна к очистному забою. Выемочный комбайн имеет первую режущую поверхность для удаления материала из очистного забоя во время движения комбайна в направлении, по существу параллельном очистному забою, и вторую режущую поверхность для удаления материала из очистного забоя во время движения выемочного комбайна в направлении, по существу перпендикулярном очистному забою. Устройство перемещения конвейера прижимает вторую режущую поверхность к очистному забою.
[0005] В другом варианте выполнения изобретения предложен способ продвижения системы сплошной открытой разработки. Система содержит забойный конвейер, проходящий по существу параллельно очистному забою, выемочный комбайн системы сплошной открытой разработки, поддерживаемый забойным конвейером и выполненный с возможностью перемещения вдоль забойного конвейера, и несколько устройств перемещения груза, присоединенных к забойному конвейеру. Способ в целом включает удаление материала из очистного забоя путем перемещения выемочного комбайна системы сплошной разработки вдоль конвейера. Далее, способ включает приведение в действие нескольких устройств перемещения груза для продвижения забойного конвейера и выемочного комбайна системы сплошной разработки к очистному забою, и приведение во взаимодействие режущей поверхности выемочного комбайна системы сплошной разработки с очистным забоем так, что режущая поверхность врезается в очистной забой. Способ также включает переустановку первой группы из нескольких устройств перемещения груза, для приготовления первой группы для последующей операции по перемещению забойного конвейера. Переустановка происходит тогда, когда вторая группа из нескольких устройств перемещения груза остается по существу неподвижной. Способ также включает переустановку второй группы из нескольких устройств перемещения груза для последующей операции по перемещению забойного конвейера после переустановки первой группы из нескольких устройств перемещения груза. Переустановка второй группы из нескольких устройств перемещения груза происходит тогда, когда первая группа из нескольких устройств перемещения груза остается по существу неподвижной.
[0006] В другом варианте выполнения изобретения предложено устройство перемещения груза, выполненное с возможностью перемещения компонента в системе открытой разработки. Устройство перемещения груза в целом содержит привод, содержащий первую часть и вторую часть, выполненную с возможностью перемещения относительно первой части, устройство для бурения земли, присоединенное к первой части и выполненное с возможностью перемещения относительно, и раму, присоединенную ко второй части и выполненную с возможностью перемещения относительно второй части. Устройство для бурения земли содержит бурильный элемент, имеющий ось бурения, и привод для вращения бурильного элемента вокруг оси бурения и для перемещения бурильного элемента аксиально вдоль оси бурения. Рама выполнена с возможностью соединения с компонентом так, что перемещение первой части относительно второй части вызывает перемещение устройства для бурения земли относительно указанного компонента.
[0007] Другие аспекты изобретения станут очевидными из рассмотрения детального описания и сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
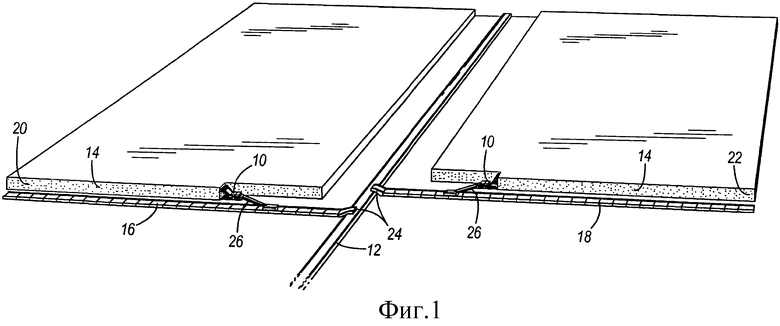
[0008] Фиг.1 иллюстрирует на виде сверху в аксонометрии работы по открытой разработке с использованием пары карьерных комбайнов непрерывного действия.
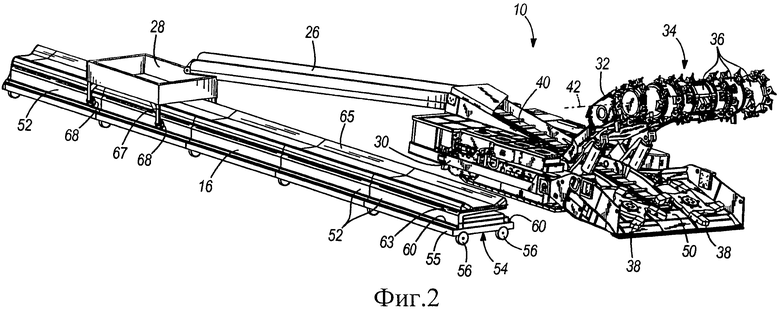
[0009] Фиг.2 представляет собой увеличенный вид в аксонометрии, аналогичный изображенному на Фиг.1, показывающий только один из карьерных комбайнов непрерывного действия.
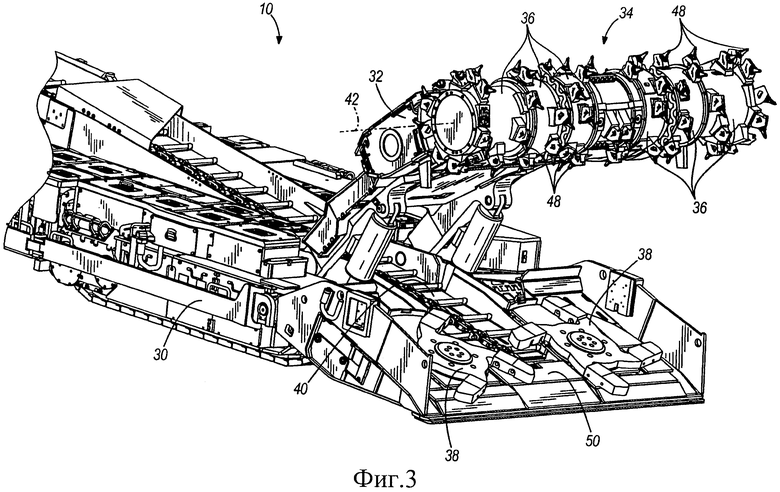
[0010] Фиг.3 представляет собой вид в аксонометрии комбайна непрерывного действия, изображенного на Фиг.2.
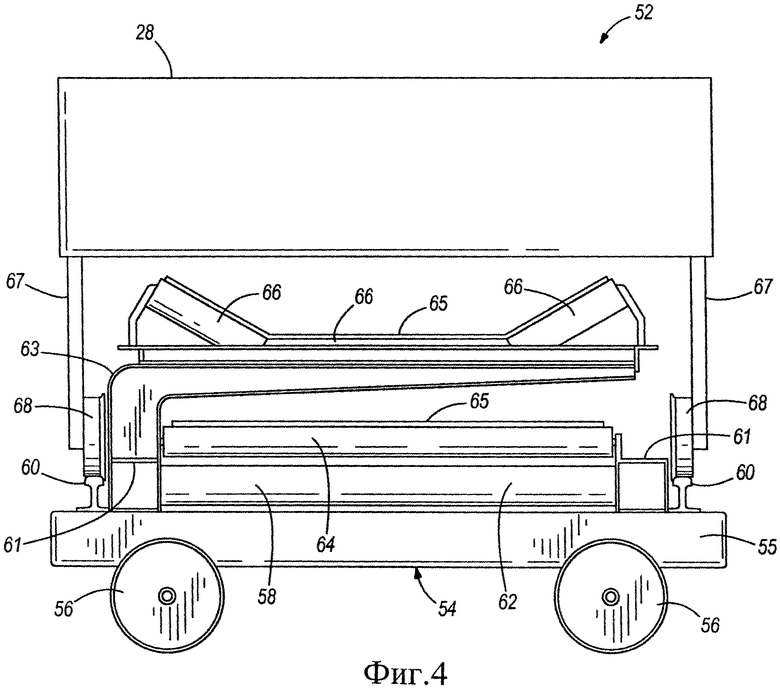
[0011] Фиг.4 представляет собой вид сверху части забойного конвейера, изображенного на Фиг.2.
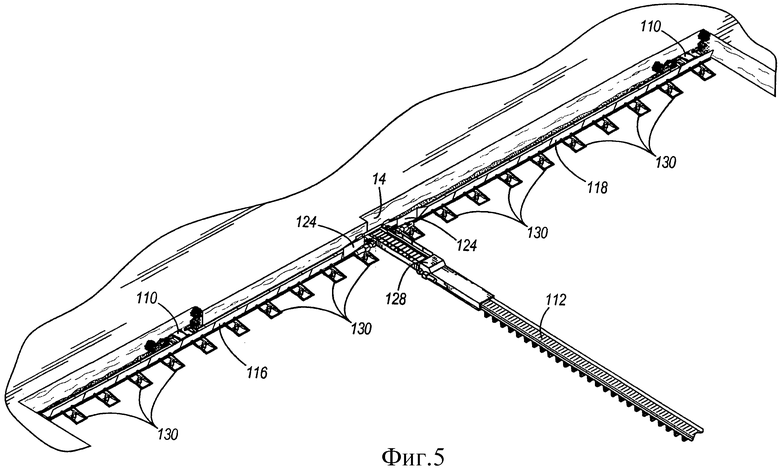
[0012] Фиг.5 иллюстрирует на виде сверху в аксонометрии другие работы по открытой разработке с использованием системы сплошной открытой разработки.
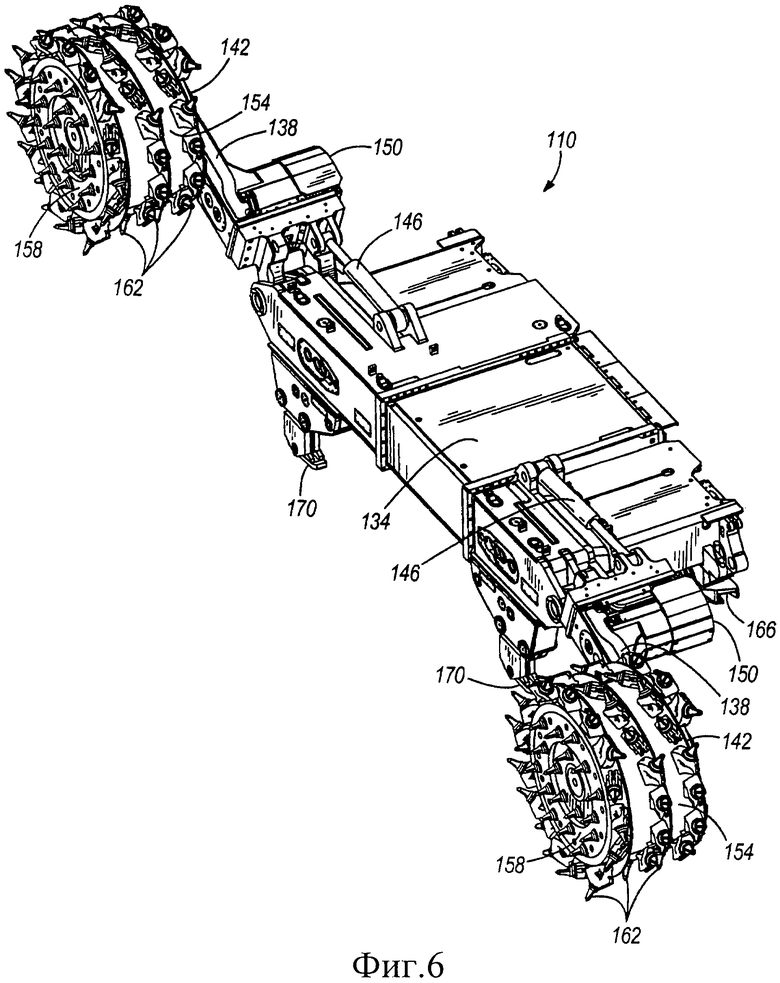
[0013] Фиг.6 представляет собой вид в аксонометрии выемочного комбайна системы сплошной открытой разработки, связанного с системой сплошной открытой разработки, изображенной на Фиг.5.
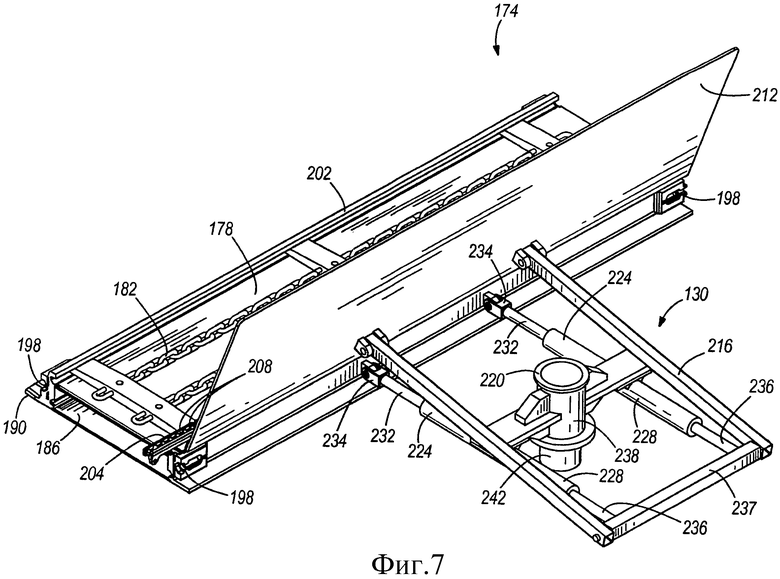
[0014] Фиг.7 представляет собой вид в аксонометрии части забойного скребкового конвейера, связанного с системой сплошной открытой разработки, изображенной на Фиг.5, и с устройством перемещения груза для перемещения забойного конвейера.
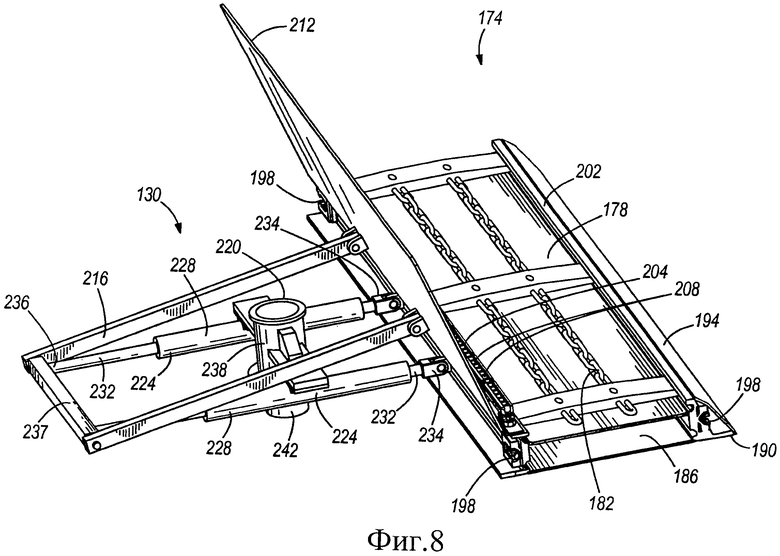
[0015] Фиг.8 представляет собой другой вид в аксонометрии части забойного скребкового конвейера, изображенного на Фиг.7.
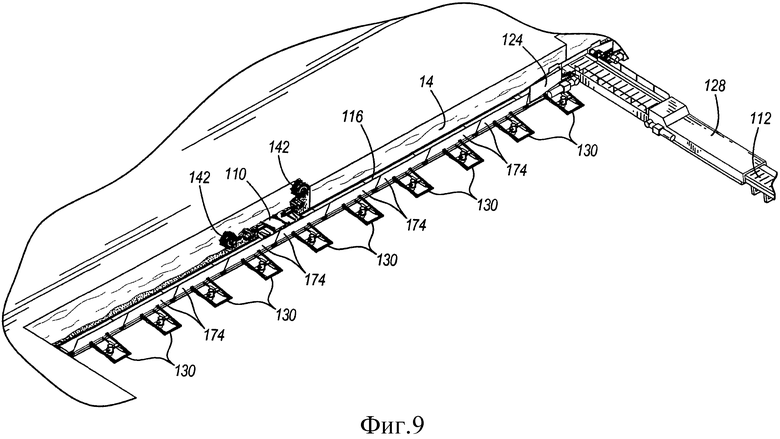
[0016] Фиг.9 представляет собой увеличенный вид в аксонометрии, аналогичный изображенному на Фиг.5, изображающий выемочный комбайн системы сплошной открытой разработки, изображенный на Фиг.6, удаляющий материал из очистного забоя, забойный скребковый конвейер, изображенный на Фиг.7 и 8, транспортирующий материал к дробилке, и несколько устройств перемещения груза, изображенных на Фиг.7 и 8.
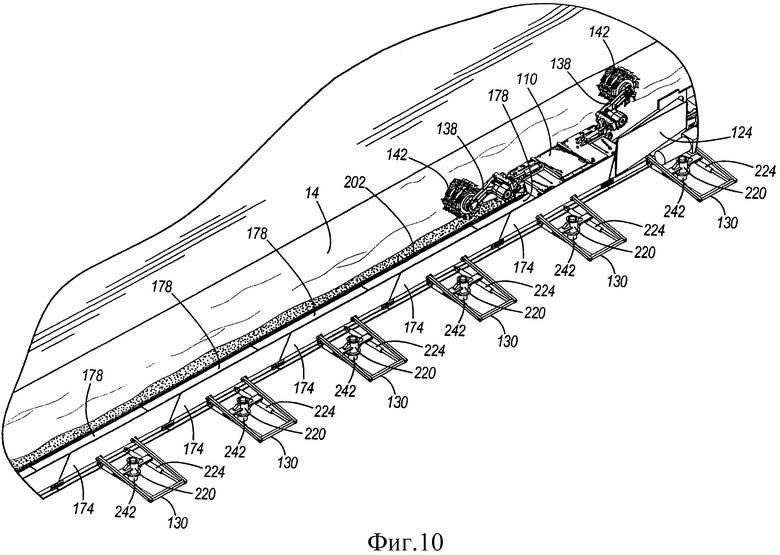
[0017] Фиг.10 представляет собой вид в аксонометрии части системы сплошной открытой разработки, изображенной на Фиг.5, перед выполнением операции по слепому внедрению.
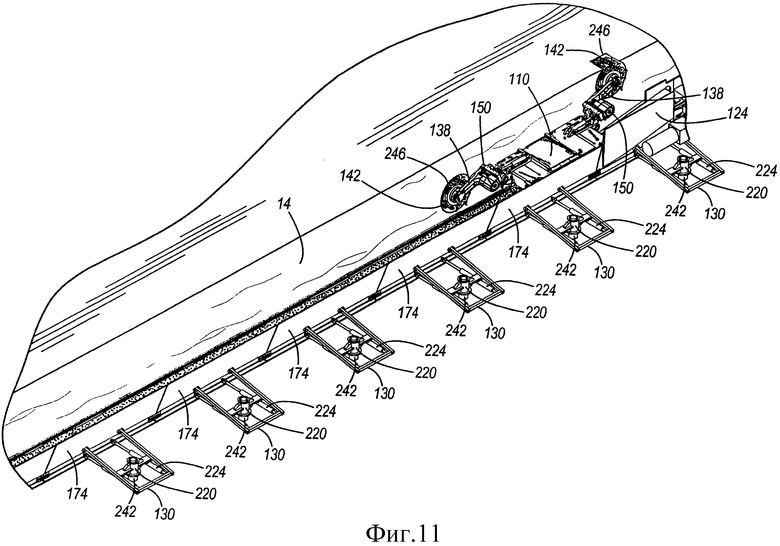
[0018] Фиг.11 представляет собой вид в аксонометрии, аналогичный изображенному на Фиг.10, показывающий систему сплошной открытой разработки сразу после завершения операции по слепому внедрению.
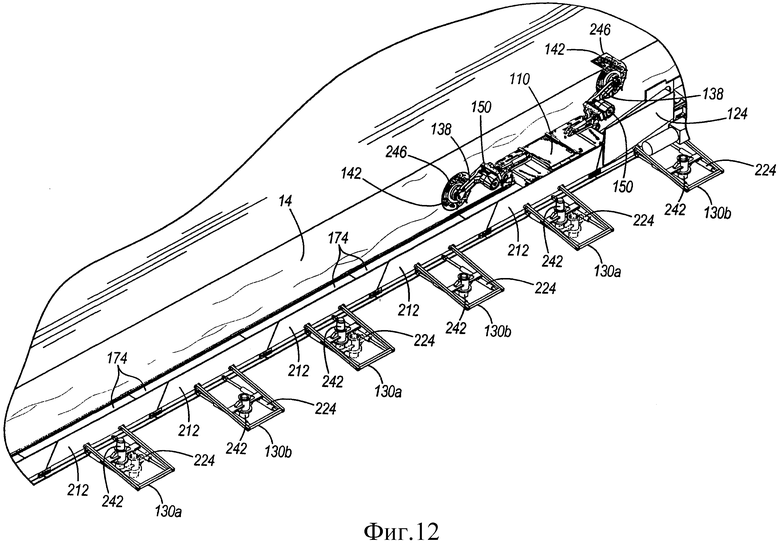
[0019] Фиг.12 представляет собой вид в аксонометрии, аналогичный изображенному на Фиг.10, показывающий систему сплошной открытой разработки после того, как первый набор устройств перемещения груза переустановился после завершения операции по слепому внедрению.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] Перед тем, как будет подробно описан любой вариант выполнения изобретения, следует понимать, что изобретение не ограничено в своем применении деталями конструкции и расположением компонентов, изложенными в последующем описании или показанными на последующих чертежах. Изобретение может иметь другие варианты выполнения и быть выполнено на практике или осуществлено различными способами.
[0021] Фиг.1 представляет собой вид сверху в аксонометрии первого типа разработки открытым способом с использованием пары карьерных комбайнов 10 непрерывного действия. Разгрузочный конвейер 12 проходит вдоль середины разреза по существу перпендикулярно двум очистным забоям 14 по каждую сторону от середины разреза. Первый и второй забойные конвейеры 16, 18 бокового смещения проходят по существу перпендикулярно наружу от разгрузочного конвейера 12 вдоль очистного забоя 14. Если смотреть сверху, первый и второй забойные конвейеры 16, 18 проходят влево и вправо от разгрузочного конвейера 12, по образу чередующихся жилок листа. Первый забойный конвейер 16 проходит до первого конца 20 очистного забоя 14, а второй забойный конвейер 18 проходит до второго конца 22 очистного забоя 14. Каждый из забойных конвейеров 16, 18 содержит разгрузочную часть 24, расположенную рядом с разгрузочным конвейером 12, между противоположными первым и вторым концами 20, 22, и может быть приведен в действие для передачи материала, удаленного из очистного забоя 14, к разгрузочному конвейеру 12. Несмотря на то, что проиллюстрированная операция включает использование двух комбайнов 10 непрерывного действия и первого и второго забойных конвейеров 16, 18, в других операциях может быть использован только один комбайн 10 и только один забойный конвейер. Кроме того, хотя последующее обсуждение относится к комбайну 10 и первому забойному конвейеру 16, обсуждение в равной степени применимо к комбайну 10 и второму забойному конвейеру 18.
[0022] Со ссылкой также на Фиг.2, комбайн 10 непрерывного действия может удалять материал из очистного забоя 14 и загружать удаленный материал на забойный конвейер 16. Комбайн 10 соединен с помощью отвального конвейера 26 с бункером 28, который установлен на забойном конвейере 16. Комбайн 10 перемещается вбок вдоль очистного забоя 14 и удаляет материал из очистного забоя 14. Комбайн 10 также собирает удаленный материал и транспортирует его в бункер 28 через отвальный конвейер 26. В некоторых вариантах выполнения бункер 28 содержит дробящие ролики (не показаны), которые придают материалу определенный размер перед выгрузкой измельченного материала на забойный конвейер 16, проходящий под бункером 28. Забойный конвейер 16 переносит материал к разгрузочной части 24, которая загружает материал на загрузочный конвейер 12. Затем разгрузочный конвейер переносит материал из области разработки для дальнейшей обработки. Материал, таким образом, непрерывно удаляется из очистного забоя 14 и переносится от комбайна 10 в бункер 28, к забойному конвейеру 16, к разгрузочной части 24, а затем с помощью разгрузочного конвейера 12 из области разработки. В некоторых вариантах выполнения вся работа автоматизирована и/или управляется с помощью операторов, расположенных далеко от области разработки.
[0023] Фиг.3 представляет собой подробный вид комбайна 10 непрерывного действия. Комбайн 10 содержит корпус 30, вертикально проходящую разрезающую консоль или штангу 32, установленную на корпусе 30, и поперечно удлиненную бурильную головку 34, установленную на штанге 32. Штанга 32 выполнена с возможностью перемещения бурильной головки 34 в целом в вертикальном направлении для удаления материала из забоя 14. Как видно, диапазон вертикального перемещения штанги 32 является достаточным для размещения бурильной головки 34 выше, чем других элементов комбайна 10. В некоторых вариантах выполнения штанга 32 может быть поднята на высоту вертикально над землей около 5 метров. Бурильная головка 34 содержит несколько больших режущих барабанов 36, соосно установленных на конце штанги 32 для вращения вокруг оси 42. Режущие барабаны 36 имеют несколько зубцов 48, которые выцарапывают, разрезают и разламывают материал, отходящий от очистного забоя 14. Режущие барабаны 36 функционально соединены с двигателем привода режущего инструмента (не показан), который приводит в движение вращающиеся режущие барабаны 36. Приводной двигатель может представлять собой или включать электрические или гидравлические двигатели, комбинацию электрических и гидравлических двигателей, а в некоторых вариантах выполнения может приводиться в движение или получать энергию, по меньшей мере частично, от двигателя внутреннего сгорания, установленного на корпусе. В связи с этим комбайн 10 может содержать «синхронизирующий» дизель-электрический блок питания или аналогичный генераторный блок, который содержит двигатель внутреннего сгорания, соединенный с генератором или с другим подходящим устройством для производства электроэнергии из работы, произведенной двигателем. Такой генераторный блок может быть выполнен с возможностью управления и получения энергии для всех операций комбайна непрерывного действия без необходимости использования внешнего источника питания. Другие конструкции комбайна 10 могут использовать внешний источник питания (не показан) и могут содержать гибкий электрический кабель для передачи электрической энергии от внешнего источника питания. Тем не менее, другие конструкции комбайна 10 могут включать как гибкий электрический кабель и генераторный блок, так что любая система может быть использована для обеспечения электроэнергией, как это диктуется конкретным применением или рабочей средой.
[0024] Комбайн 10 также содержит лоток 50, расположенный, как правило, ниже бурильной головки 34, для сбора материала, удаленного из очистного забоя 14. Лоток 50 содержит пару вращающихся собирающих колес 38, которые собирают и направляют материал к конвейеру 40 комбайна, который проходит от лотка 50 к задней части комбайна 10. Конвейер 40 проходит назад от лотка 50 и загружает материал, удаленный из очистного забоя 14, на отвальный конвейер 26 (см. Фиг.2).
[0025] Снова со ссылкой на Фиг.2, отвальный конвейер 26 проходит между задней частью конвейера 40 комбайна и бункером 28, который расположен над забойным конвейером 16. Отвальный конвейер 26 имеет шарнирную конструкцию, что дает ему возможность поворачиваться относительно либо комбайна 10, либо бункера 28, либо и того и другого. В некоторых вариантах выполнения отвальный конвейер 26 также выполнен с возможностью телескопического выдвижения. В некоторых конструкциях отвальный конвейер 26 и/или забойные конвейеры 16, 18 могут представлять собой пластинчатые конвейеры, которые основаны на пролетах бесконечной ленты или цепные конвейеры. Отвальный конвейер 26 может функционально приводиться в действие приводной системой комбайна 10 (например, «синхронизирующим» дизель-электрическим блоком питания) или может содержать свою собственную независимую приводную систему, любая из которых может быть по своей сути электрической и/или гидравлической.
[0026] Со ссылкой также на Фиг.4, в проиллюстрированной конструкции забойные конвейеры 16 и 18 состоят из нескольких конвейерных секций 52. Конвейерные секции установлены на устройстве 54 перемещения конвейера для перемещения конвейерных секций к очистному забою 14 и от него, или могут включать это устройство как единое целое. В изображенном варианте выполнения устройство 54 перемещения конвейера содержит ходовую часть 55, установленную на колесах 56. Колеса 56 могут представлять собой колеса с резиновыми шинами, гусеничную ленту или практически любой другой вид поддержки, который обеспечивает возможность перемещения конвейерных секций 52. Несмотря на то, что на Фиг.4 показано устройство 54 перемещения конвейера, выполненное как единое целое с конвейерной секцией 52 и расположенное под ней, другие варианты выполнения могут содержать устройство 54 перемещения конвейера, которое выполнено отдельно от конвейерной секции 52, и/или устройство 54 перемещения конвейера, которое может толкать или тянуть конвейерную секцию 52 сбоку, включая, например, устройство перемещения груза, описанное ниже.
[0027] Каждое устройство 54 имеет закрепленную конфигурацию, в которой устройство 54 является по существу закрепленным относительно очистного забоя 14, и незакрепленную конфигурацию, в которой устройство 54 может перемещаться относительно очистного забоя 14. Закрепленная и незакрепленная конфигурации могут быть получены с помощью механических, гидравлических, пневматических или электрических систем, в зависимости от возможностей и конфигурации устройства 54. Например, в показанном варианте выполнения может быть предусмотрен тормозной механизм, который предотвращает вращение одного или нескольких колес 56. Другие варианты выполнения могут включать более агрессивные крепежные системы, которые пробуриваются в землю или иным образом крепят себя к земле, чтобы предотвращать перемещение устройства 54 и конвейерной секции 52.
[0028] Также со ссылкой на Фиг.4, ходовая часть 55 с использованием параллельных рельсов 60 поддерживает раму 58 конвейерной секции и опору бункера. В альтернативной конструкции рельсы 60 могут поддерживаться рамой 58. Проиллюстрированная рама 58 содержит удлиненные боковые балки 61 и поперечные балки 62 (только одна поперечная балка показана на Фиг.4). Проиллюстрированная рама 58 также содержит перевернутую L-образную консоль 63, которая проходит вверх от одной из боковых балок 61, а затем поперек ширины конвейерной секции. Несколько нижних роликов 64 с возможностью вращения установлены между боковыми балками 61 и выше поперечных балок 62 и обеспечивают обратный ход конвейерной ленты 65. Набор трехроликовых опор 66 поддерживается консолью 63 и обеспечивает транспортирующий ход конвейерной ленты 65. Некоторые варианты выполнения конвейерной секции 52 могут также содержать опору (не показана), расположенную на стороне L-образной консоли 63, которая не подсоединена к ходовой части 55 для дополнительной поддержки опор 66 или для поддержки рельсов 60, установленных над рамой 58, по существу рядом с опорами 66.
[0029] Бункер 28 поддерживается над конвейерной лентой 65 с помощью рамы, содержащей опоры 67, проходящие вниз от бункера 28 к колесам 68, которые катятся по рельсам 60. Бункер 28 выполнен с возможностью перемещения по рельсам 60 в направлении, по существу параллельном забою 14, и по существу отслеживает движение комбайна 10. Бункер 28 может свободно катиться по рельсам 60, при этом его тащат или толкают к требуемому положению комбайном 10 благодаря соединению, которое обеспечивает отвальный конвейер 26. Бункер 28 может, в виде альтернативы, содержать независимую приводную систему для приведения в действие колес 68, или же приводная система может быть включена в конвейерную секцию 52 для перемещения бункера 28 вдоль забойного конвейера 16.
[0030] Со ссылкой в целом на Фиг.1-4, при работе комбайн 10 начинает удалять материал с одного конца очистного забоя 14 (например, с конца, находящегося рядом с серединой разреза) и перемещается вбок вдоль забоя 14. Комбайн 10 работает путем вращения режущих барабанов 36 и раскачивания штанги 32 во всем вертикальном диапазоне ее перемещения (например, около 5 метров), одновременно вводя режущий барабан 36 во взаимодействие с материалом. По мере того как материал удаляется, комбайн 10 продвигается вперед вдоль очистного забоя 14. В одном иллюстративном варианте выполнения комбайн 10 удаляет около 30 кубических метров материала на каждый метр бокового перемещения вдоль очистного забоя 14.
[0031] По мере того как комбайн 10 продвигается вперед, материал, удаляемый режущим барабаном 36, падает или собирается в лоток 50. Вращающиеся колеса 38 коллектора направляют собранный в лотке 50 материал к конвейеру 40 комбайна. Конвейер 40 комбайна транспортирует материал в направлении задней части комбайна 10 и на отвальный конвейер 26, который; в свою очередь, транспортирует и, в конечном итоге, загружает материал в бункер 28. После того как материал оказался в бункере 28, материал может быть отсортирован по размеру, прежде чем его загрузят на забойный конвейер 16. Забойный конвейер 16 переносит материал к участку 24 выгрузки и загружает его на разгрузочный конвейер 12, где он уносится от места разработки.
[0032] Когда комбайн 10 проходит по очистному забою 14, бункер 28 перемещается вместе с комбайном 10 от одного конца забойного конвейера 16 к другому его концу. Как уже говорилось выше, бункер 28 может быть выполнен с возможностью свободного перемещения вдоль забойного конвейера 16 и может быть отбуксирован вдоль конвейера 16 комбайном 10 и отвальным конвейером 26; или же для перемещения бункера 28 слаженным образом вместе с комбайном 10 на бункере 28 или на забойном конвейере 16 может быть предусмотрен приводной механизм.
[0033] Когда комбайн 10 достигает конца очистного забоя 14 после прохода забоя в наружном направлении (например, при перемещении от разгрузочного конвейера 12), он может либо откатиться назад к разгрузочному конвейеру 12, либо может выполнить процедуру бокового вруба, что дает комбайну 10 возможность развернуться и продолжать вести разработку при движении вовнутрь, в сторону разгрузочного конвейера 12. Для выполнения процедуры бокового вруба комбайн 10 поворачивается приблизительно на 90 градусов так, чтобы ось вращения 42 режущего барабана 36 (см. Фиг.3) была по существу параллельной очистному забою 14. Комбайн 10 продвигается вперед в очистной забой 14 на расстояние, по меньшей мере приблизительно равное ширине комбайна 10, и удаляет материал из очистного забоя 14, сохраняя, при этом, взаимодействие между конвейером комбайна, отвальным конвейером 26 и бункером 28. В некоторых рабочих ситуациях глубина разреза может быть увеличена, чтобы способствовать маневренности комбайна 10 и/или чтобы обеспечить дополнительное пространство между очистным забоем 14 и конвейером 16 для выполнения последующих операций вырезов или поворотов.
[0034] После завершения начального разреза комбайн 10 поворачивает обратно из канала, сделанного начальным разрезом, и перемещает режущий барабан 36 для выполнения второго разреза. Второй разрез выполняется таким же образом, как и начальный разрез, но он расположен ближе к разгрузочному конвейеру. После завершения второго разреза будет иметься оконечная часть выреза очистного забоя 14, имеющая ширину примерно в две ширины забоя, и глубину по меньшей мере в одну глубину забоя. В зависимости от размера и маневренности комбайна 10, для увеличения ширины оконечной части выреза, может быть также выполнен третий разрез. После того, как оконечная часть выреза завершена, комбайн 10 размещают в оконечной части выреза с осью вращения 42 режущего барабана 36, ориентированной перпендикулярно очистному забою 14 и обращенной в сторону разгрузочного конвейера 12. Комбайн 10 начинает вести разработку обратно к разгрузочному конвейеру, пока не достигнет середины разреза, после чего он поворачивает и выполняет другой проход с выполнением разработки в наружном направлении.
[0035] Когда комбайн 10 завершает проход с выполнением разработки вдоль очистного забоя 14, забойный конвейер 16 автоматически продвигается к очистному забою 14. Забойный конвейер 16 может продвинуться к очистному забою 14 как единое целое, в результате чего весь забойный конвейер 16 перемещается к очистному забою 14 одновременно, когда комбайн 10 изменяет свое положение для начала следующего прохода с выполнением разработки, или же забойный конвейер 16 может «ползти» за комбайном 10, когда последний продвигается вдоль очистного забоя 14. В любом случае, каждое из устройств 54 перемещения конвейера работает для перемещения к очистному забою 14 соответствующих конвейерных секций 52. Например, в отношении конвейерной секции 52 и устройства 54 перемещения конвейера, изображенных на Фиг.4, устройство 54 перемещения конвейера изменяет свою конфигурацию из закрепленной в незакрепленную, а колеса 56 приводятся в действие для перемещения устройства 54 перемещения конвейера и конвейерной секции 52 к очистному забою 14. Конкретное расстояние, на которое они переместились, и конкретное расстояние между конвейерной секцией 52 и очистным забоям 14 после завершения смены положения зависит, среди прочего, от конфигураций конвейерной секции 52, бункера 28, отвального конвейера 26 и комбайна 10.
[0036] Фиг.5 иллюстрирует на виде сверху в аксонометрии еще одни работы по открытой разработке с использованием системы сплошной открытой разработки. Система сплошной открытой разработки содержит разгрузочный конвейер 112, ориентированный по существу перпендикулярно очистному забою 14 и проходящий от него. Первый и второй забойные скребковые конвейеры 116, 118 проходят вдоль очистного забоя 14 и ориентированы по существу перпендикулярно разгрузочному конвейеру 112. Каждый из забойных скребковых конвейеров 116, 118 имеет установленный на нем комбайн непрерывного действия, выполненный в виде выемочного комбайна 110 системы сплошной разработки. Каждый выемочный комбайн 110 системы сплошной разработки установлен на своем соответствующем забойном конвейере 116, 118 для перемещения в поперечном направлении, по существу параллельно очистному забою 14. Каждый забойный скребковый конвейер 116, 118 содержит приводной конец, ограничивающий разгрузочную часть 124, расположенную рядом с разгрузочным конвейером 112. Разгрузочный конвейер 112 содержит дробилку 128, расположенную рядом с разгрузочными частями 124 каждого забойного скребкового конвейера 116, 118. Несколько устройств перемещения конвейера, выполненные в виде устройств 130 перемещения груза, связано с конвейерами 116, 118 и выполнены с возможностью перемещения конвейеров 116, 118 по направлению к очистному забою 14, как будет описано дальше.
[0037] Со ссылкой на Фиг.6, каждый выемочный комбайн 110 имеет в целом прямоугольный корпус 134 и пару шарнирных консолей 138, каждая из которых поддерживает разрезающий узел 142. Консоли 138 шарнирно соединены с противоположными концами корпуса 134 и поворачиваются с помощью приводов 146, присоединенных между консолями 138 и корпусом 134. Каждая консоль 138 поддерживает двигатель 150 разрезающего узла, выполненный с возможностью приведения во вращение разрезающего узла 142. Разрезающий узел 142 является в целом цилиндрическим и имеет первую, в целом цилиндрическую, режущую поверхность 154 для удаления материала из очистного забоя 14, когда выемочный комбайн 110 перемещается по существу параллельно очистному забою 14, и вторую режущую поверхность 158, ограниченную торцевой поверхностью разрезающего узла 142 для удаления материала из очистного забоя 14, когда выемочный комбайн 110 перемещается по существу перпендикулярно очистному забою 14. Вторая режущая поверхность 158 может, в целом, быть круглой, кольцевой, конической или иметь форму усеченного конуса, в зависимости, среди прочего, от типа материала, который режущая поверхность 158 намеревается разрезать. Для удаления материала из очистного забоя 14 как первая, так и вторая режущая поверхность 154, 158 может иметь несколько режущих зубцов 162 различных конфигураций. В проиллюстрированной конструкции показано, что зубцы 162 установлены на режущих поверхностях 154 и 158.
[0038] Выемочный комбайн 110 также содержит пару внутренних опорных ножек 166 и пару наружных опорных ножек 170 (на Фиг.6 видна только одна из наружных опорных ножек). Внутренние и наружные опорные ножки 166, 170 выполнены с возможностью установки на забойных конвейерах 116, 118 таким образом, что выемочный комбайн 110 может перемещаться вдоль забойных конвейеров 116, 118 из разгрузочной части 124 до дистального конца забойных конвейеров 116, 118 и обратно. В некоторых вариантах выполнения выемочный комбайн 110 использует двигатели с водяным охлаждением и содержит систему с переменным потоком воды в замкнутом контуре (не показано). Система водяного охлаждения может содержать подходящую комбинацию насосов, термостатов, радиаторов и/или теплообменников для управления потоком охлаждающей воды, протекающей через выемочный комбайн 110.
[0039] Со ссылкой на Фиг.7 и 8, каждый забойный конвейер 116, 118 состоит из нескольких конвейерных секций 174. Каждая конвейерная секция 174 содержит лоток 178 для поддержки продвигающегося вперед цепного конвейера 182, и канал 186, расположенный под лотком 178, через который проходит обратная ветвь цепного конвейера 182. Цепной конвейер 182 приводится в действие от приводного узла, связанного с разгрузочной частью 124. Во время работы подошва 190 конвейерной секции 174 расположена проксимально к очистному забою 14 и содержит наклонную поверхность 194, которая направляет материал, вырезанный из забоя 14, вверх и на цепной конвейер 182, когда конвейерная секция 174 продвигается вперед к забою 14.
[0040] Каждый угол конвейерной секции 174 имеет прикрепляющее гнездо 198, которое облегчает прикрепление конвейерной секции 174 к соседней конвейерной секции 174. Внутренний край (ближайшей к очистному забою 14 во время работы) лотка 178 ограничивает направляющую 202, по которой перемещается внутренние опорные ножки 170 выемочного комбайна 110. Наружный край лотка 178 ограничивает направляющую 204, по которой перемещаются наружные опорные ножки 166 выемочного комбайна 110. Направляющая 204 содержит несколько приводных зубцов 208, с которыми взаимодействуют соответствующие зубцы (не показаны), выполненные на наружных опорных ножках 166, таким образом, что выемочный комбайн 110 может приводиться в движение вдоль забойного конвейера 116, 118. В некоторых вариантах выполнения выемочный комбайн 110 содержит бортовой приводной узел для приведения в движение выемочного комбайна 110 вдоль забойного конвейера 116, 118. В других вариантах выполнения приводной узел может быть предусмотрен на одной или нескольких конвейерных секциях 174, или может быть связан с разгрузочной частью 124 для перемещения выемочного комбайна 110 вдоль забойного конвейера 116, 118. Навесной борт 212 проходит под углом в сторону от лотка 178 только снаружи от направляющей 204. В результате навесной борт 212 проходит вверх и в сторону от забоя 14 так, что материал, падающий с очистного забоя 14, направляется на конвейер 182 и не падает позади конвейерной секции 174.
[0041] Все также со ссылкой на Фиг.7 и 8, проиллюстрированное устройство 130 перемещения груза содержит раму 216, бурильный узел 220 и пару приводов 224 (некоторые варианты выполнения могут содержать один привод 224). Каждый привод 224 содержит первую приводную часть 228, соединенную с бурильным узлом 220, и вторую приводную часть 232, выполненную с возможностью перемещения относительно первой части привода 228 и соединенную с рамой 216 и с секцией 174. Приводы 224 выполнены с возможностью перемещения рамы 216 и конвейерной секции 174 относительно бурильного узла 220 для продвижения конвейерной секции 174 к забою 14. В некоторых вариантах выполнения один или несколько приводов 224 представляют собой линейные приводы и включают линейный датчик.
[0042] В проиллюстрированной конструкции приводы 224 являются в целом цилиндрическими, а вторая приводная часть 232 проходит через первую приводную часть 228. Внутренний конец 234 второй приводной части 232 соединен с конвейерной секцией 174, а наружный конец 236 второй приводной части 232 соединен с рамой 216. Рама 216 проходит вверх и под углом от наружного конца 236 второй приводной части 232 и соединена с навесным бортом 212 конвейерной секции 174. Рама 216 также содержит поперечную распорку 237, которая проходит между вторыми приводными частями 232. Рама 216, конвейерная секция 174 и вторая приводная часть 232, таким образом, ограничивают по существу жесткую, триангулированную конструкцию и по существу закреплены для совместного перемещения.
[0043] Бурильный узел 220 имеет в целом цилиндрический корпус 238, который поддерживает и направляет бурильный элемент 242, который может быть забурен, а затем извлечен из земли, чтобы по существу зафиксировать расположение бурильного узла 220 относительно очистного забоя 14. Когда бурильный элемент 242 забуривается в землю, устройство 130 перемещения груза находится в закрепленной конфигурации, а когда бурильный элемент 242 извлекают из земли, устройство 130 перемещения груза находится в незакрепленной конфигурации. В некоторых вариантах выполнения бурильный элемент 242 является по существу кольцеобразным, чтобы свести к минимуму площадь поперечного сечения бурения для максимальной реакционной способности нагрузки. Эта кольцеобразная конфигурация сводит к минимуму время, в течение которого бурильный элемент 242 забуривается в землю, и минимизирует износ бурильного элемента 242. Еще одно преимущество кольцеобразного бурильного элемента 242 состоит в том, что, когда конвейерная секция 174 продвигается вперед, бурильный элемент 242 оставляет в земле кольцевой вырез, в отличие от открытого отверстия, которое может представлять собой опасность для людей и техники, которая маневрирует на недавно открытой поверхности области разработки. Приводная система, связанная с корпусом 238, выполнена с возможностью вращения бурильного элемента 242 вокруг оси сверления, а также для перемещения бурильного элемента 242 вдоль оси сверла в процессе бурения. Хотя это не показано, в некоторых вариантах выполнения устройство 130 перемещения груза также содержит интегрированные гидравлические системы распределения энергии, такие как электродвигатель или двигатель внутреннего сгорания, приводящие в действие гидравлический насос и связанные с ними клапаны и устройства управления, так что помимо управляющих сигналов для координация работы с другими компонентами системы сплошной открытой разработки, каждое устройство 130 является независимым работающим узлом.
[0044] Со ссылкой также на Фиг.9 и 10, конвейерные секции 174 соединены друг с другом и проходят вдоль очистного забоя 14. Устройство 130 перемещения груза связано с каждой конвейерной секцией 174, причем каждое устройство 130 выполнено с возможностью перемещения соответствующей конвейерной секции 174 к забою 14. Выемочный комбайн 110 перемещается по направляющим 202 и направляющим 204 (см. Фиг.7-8) конвейерных секций 174 и поперек пересекает забой 14 для удаления из него материала. Во время бокового перемещения выемочного комбайна 110 разрезающие узлы 142 вращаются двигателями 150 разрезающего устройства, а шарнирные консоли 138 поворачиваются вверх и вниз приводами 146 таким образом, что цилиндрические режущие поверхности 154 взаимодействуют и удаляют материал из забоя 14 (см. Фиг.7-8).
[0045] Когда выемочный комбайн 110 пересекает вбок очистной забой 14, устройства 130 перемещения груза находятся в закрепленной конфигурации таким образом, что устройства 130 по существу фиксируют положение конвейерных секций 174 относительно забоя 14. Более конкретно, бурильный элемент 242 проходит и взаимодействует с землей так, что он выполнен с возможностью реакции на силы, связанные с разрезающими и транспортирующими операциями выемочного комбайна 110 и конвейерных секций 174 для поддержания общей стабильности системы. Кроме того, приводы 224 выполнены с возможностью поддержания по существу неподвижной взаимосвязи между бурильным узлом 220 и секцией 174.
[0046] Со ссылкой теперь на Фиг.10-12, устройства 130 перемещения груза выполнены с возможностью осуществления операции по слепому внедрению, что дает выемочному комбайну 110 возможность работать в двух направлениях. На Фиг.10-12 проиллюстрирована система сплошной открытой разработки в различных конфигурациях, связанных с осуществлением операции по слепому внедрению и выполняемой выемочным комбайном 110, расположенным рядом с разгрузочной частью 124 первого забойного скребкового конвейера 116. Эта же операция может также быть выполнена, когда выемочный комбайн 110 расположен на дальнем дистальном конце забойного скребкового конвейера 116 на конце очистного забоя 14 (см. Фиг.9).
[0047] Как показано на Фиг.10, устройства 130 перемещения груза выполнены со своими соответствующими бурильными элементами 242, выступающими и взаимодействующими с землей. Кроме того, приводы 224 каждого устройства 130 находятся во втянутом положении, в котором бурильный узел 220 расположен настолько близко к конвейерной секции 174, насколько это обеспечивает конфигурация приводов 224 и рамы 216. Выемочный комбайн 110 достиг конечного положения на забойном скребковом конвейере 116 и только что завершил проход вдоль очистного забоя 14. Во время осуществления операции по слепому внедрению выемочный комбайн 110 остается практически неподвижным относительно конвейерных секций 174, а шарнирные консоли 138 остаются по существу неподвижными относительно корпуса 134 выемочного комбайна 110.
[0048] Чтобы начать операцию по слепому внедрению, разрезающие узлы 142 вращают, а приводы 224 устройства 130 перемещения груза активируют, чтобы толкать раму 216, конвейерные секции 174 и выемочный комбайн 110 к очистному забою 14 в направлении, по существу перпендикулярном очистному забою 14. Когда выемочный комбайн 110 перемещается по направлению к очистному забою 14, вторые режущие поверхности 158 разрезающих узлов 142 взаимодействуют с очистным забоем 14 и забуриваются или внедряются в очистной забой 14. Как показано на Фиг.11, когда приводы 224 достигают полностью выдвинутое положение, каждый разрезающий узел 142 забуривает или выскребает в целом цилиндрическое отверстие 246 в очистном забое 14. Диапазон выдвижения приводов 224 и соответствующая глубина отверстий 246 выбираются по существу соответствующими ширине разрезающих узлов 142. В дополнение к формированию отверстий 246, выдвижение приводов 224 и перемещение конвейерных секций 174 к очистному забою 14 подталкивает материал, который упал между конвейерными секциями 174 и очистным забоям 14, вверх и через подошву 190 и наклонную поверхность 194 конвейерных секций 174 (см. Фиг.8) и на лоток 178 конвейерной секции 174, так что конвейер 182 может переносить материал по направлению к разгрузочной части 124.
[0049] В некоторых рабочих средах выемочный комбайн 110 может использовать альтернативный способ внедрения, который не использует вторую режущую поверхность 158 разрезающих узлов 142. Чтобы начать альтернативный способ внедрения, шарнирные консоли 138 поднимают так, что разрезающие узлы 142 располагаются выше верхней поверхности очистного забоя 14. Когда разрезающие узлы 142 расположены над очистным забоем 14, приводы 224 устройства 130 перемещения груза приводят в действие для проталкивания рамы 216, конвейерных секций 174 и выемочного комбайна 110 к очистному забою. Когда приводы 224 полностью выдвинуты, материал, который упал между конвейерными секциями 174 и очистным забоем 14, выталкивается вверх и через подошву 190 и наклонную поверхность 194 конвейерных секций 174 (см. Фиг.8) и на лоток 178 конвейерной секции 174. Когда приводы 224 полностью выдвинуты, разрезающие узлы 142 расположены над очистным забоем 14. Затем приводят в действие двигатель 150 разрезающего узла, чтобы вращать разрезающие узлы 142, а шарнирные консоли 138 перемещают вниз, чтобы привести во взаимодействие цилиндрические режущие поверхности 154 с верхней поверхностью очистного забоя 14. Шарнирные консоли 138 продолжают перемещаться вниз так, что цилиндрическая режущая поверхность 154 вырезает в очистном забое 14 дугообразную щель, пока разрезающие узлы 142 не будут расположены рядом с землей. Выемочный комбайн 110 может затем начать еще один проход вдоль очистного забоя 14.
[0050] Независимо от способа внедрения, как только выдвинулись приводы 224 и сформировались отверстия 246, связанные со способом слепого внедрения, или дугообразные щели, связанные с альтернативным способом слепого внедрения, устройства 130 перемещения груза начинают операцию переустановки, так что, когда выемочный комбайн 110 завершает следующий проход вниз по очистному забою 14 и приходит к противоположному концу забойного скребкового конвейера 116, все устройства 130 перемещения груза вновь готовы к выполнению другой операции по внедрению. Как показано на Фиг.12, операция переустановки включает втягивание первой группой устройств 130 своих бурильных элементов 242 для удаления их из земли, а затем приведение в действие своих приводов 224 для перемещения бурильного узла 220 к соответствующей конвейерной секции 174. Когда первая группа устройств 130а перемещения груза переустанавливается, конвейерная секция 174 остается неподвижной относительно очистного забоя 14, отчасти в связи с их значительной массой, а также потому, что вторая группа устройств 130b перемещения груза конвейера удерживает свои бурильные элементы 242 в выдвинутом положении и остается прикрепленной к земле. Приводы 224 второй группы устройств 130b перемещения груза остаются в выдвинутом положении, тогда как первая группа устройств 130а перемещения груза переустанавливается. Как только первая группа устройств 130а перемещения груза переустановлена так, что бурильный узел 220 снова находится настолько близко к конвейерной секции 174, насколько это позволяет расположение приводов 224 и рамы 216, первая группа устройств 130а перемещения груза активирует свои бурильные узлы 220 и забуривает бурильные элементы 242 обратно в землю уже в новом положении. Как только бурильные элементы 242 первой группы устройств 130а перемещения груза выдвинуты и закреплены в земле, вторая группа устройств 130b перемещения груза втягивает бурильные элементы 242 и активирует привод 224 для перемещения бурильного узла 220 обратно к конвейерным секциям 174. После переустановки вторая группа устройств 130b также активирует бурильные узлы 220 для забуривания бурильных элементов 242 обратно в землю в новом положении, при этом система сплошной открытой разработки готова после этого выполнить еще одну операцию по слепому внедрению. В некоторых применениях выемочный комбайн 110 может начать перемещение по очистному забою 14, когда устройства 130 переустанавливаются. В других применениях выемочный комбайн 110 может ждать, пока устройства 130 переустановятся, перед тем, как начать следующий проход по забою 14. Несмотря на то, что в приведенном выше описании описана система сплошной открытой разработки, в которой весь забойный скребковый конвейер 116 выполняет прямолинейное перемещение к забою 14, в других применениях может использоваться зигзагообразный режим продвижения, аналогичный тому, что был описан выше в отношении забойного конвейера 16.
[0051] В некоторых рабочих средах можно осуществить несколько упрощенную процедуру переустановки. Вместо того чтобы одновременно активировать все устройства 130 для перемещения конвейерных секций 174 к забою 14, может быть возможным перемещать конвейерные секции 174 к забою 14 с использованием только некоторых из устройств 130 перемещения груза. Например, перед началом выполнения одного из описанных выше способов внедрения вторая группа устройств 130b может отвести свои бурильные элементы 242 и настроить свои приводы 224 таким образом, чтобы по существу зафиксировать относительное положение каждого устройства 130b перемещения груза относительно конвейерной секции 174. Первая группа устройств 130а может затем управлять своими приводами 224, как описано выше для перемещения конвейерных секций 174 и устройств 130b к забою 14. После того как завершилось перемещение первой группой 130а устройств перемещения груза конвейерных секций и устройств 130b перемещения груза к очистному забою 14, устройства 130b могут начать выдвигать свои бурильные элементы 242 в землю для закрепления конвейерных секций 174 в новом местоположении. Одновременно, или вскоре после этого, устройства 130а могут извлечь свои бурильные элементы 242 из земли и активировать свои приводы 224 для перемещения своих бурильных узлов 220 обратно к конвейерным секциям 174. Чтобы уменьшить износ и улучшить рабочее время, группы устройств 130а и 130b перемещения груза могут чередоваться, работая как «толкающие» устройства перемещения груза.
[0052] Бурильный узел 220, в дополнение к выполнению функции перемещения бурильного элемента 242 между выдвинутым и втянутым положениями, также выполнен с возможностью приложения управляемой направленной вертикально вниз силы к подошве 190 конвейерной секции 174. Например, без вращения бурильного элемента 242 бурильный узел 220 может управлять тем же приводным механизмом, который обычно используется для перемещения сверла в осевом направлении, но с целью приложения или снятия опрокидывающей нагрузки к подошве 190. Эта опрокидывающая нагрузка является важным компонентом эффективного горизонтального управления и очистки (например, когда конвейерные секции 174 выдвинуты вперед, чтобы подтолкнуть вверх удаляемый материал на канал 186). Возможность управлять опрокидывающей нагрузкой посредством вертикальной силы, приложенной бурильным узлом 220 устройства 130 перемещения груза, обеспечивает возможность корректировки условий и обеспечения стабильной операционной платформы для операций вертикальной зарубки и транспортировки.
[0053] Для увеличения темпов производства в условиях мощных пластов, выемочные комбайны 110 могут эксплуатироваться таким образом, чтобы способствовать обрушению нависающих материалов на забойные скребковые конвейеры 116, 118. Например, для 8-метрового мощного пласта материала, выемочные комбайны 110 могут срезать только нижние 4 метра материала, формируя, тем самым, подрез, который оставляет 4 метра нависающего материала. Путем управления наклоном выемочных комбайнов 110 и углов, под которыми разрезающие узлы 142 взаимодействуют с очистным забоем 14, можно добиться обрушения нависающего материала. Когда нависающий материал обрушивается на забойные скребковые конвейеры 116, 118, угловые навесные борта 212 направляют обрушенный материал на лотки 178 конвейерных секций 174. В зависимости от применения дробилка негабаритов (не показана) может быть установлена на выемочном комбайне 110 для разбивания больших кусков обрушенного материала, так чтобы материал мог пройти под корпусом 134 выемочного комбайна 110 при его транспортировке по направлению к разгрузочной части 124 и дробилке 128.
[0054] Чтобы приспособиться под продвижение вперед забойных скребковых конвейеров 116, 118, дробилка 128 содержит или связана с приводным механизмом для перемещения дробилки 128 к очистному забою 14 вместе с забойными скребковыми конвейерами 116, 118. Кроме того, разгрузочный конвейер 112 снабжен системой автоматического расширения ленты, которая выдвигает разгрузочный конвейера 112, когда дробилка 128 и забойные скребковые конвейеры 116, 118 продвигаются вперед. Подходящая система автоматического расширения ленты может содержать один или несколько блоков хранения ленты, как те, которые пропускают конвейерную ленту через несколько поворотов вдоль изменяемого серпантинного пути, или другие системы, которые обеспечивают возможность установки или иным образом добавления секций к разгрузочному конвейеру 112, когда разгрузочный конвейер 112 работает. Чтобы свести к минимуму проблемы с обслуживанием кабеля, система расширения ленты может содержать систему укладки интегрированного питающего электрического кабеля с кабелеемкостью, согласованной с длиной удлинения ленты.
[0055] Обеими системами, той, что изображена на Фиг.1-4 и использует комбайн 10 непрерывного действия для открытых работ, и той, что изображена на Фиг.5-12 и использует выемочный комбайн 110, можно управлять с помощью автоматизированной центральной системы управления, удаленной от фактических компонентов разработки. Компонентами можно управлять с помощью проводных или беспроводных сигналов, которые передают состояние компонентов, их конфигурацию и расположение к центральной системе управления. Например, комбайн 10 может содержать различные датчики, преобразователи и телевизионные камеры и т.п., которые предоставляют информацию, такую как угол режущей консоли 32, скорость вращения резального барабана 36, скорость перемещения вперед самого комбайна 10, нагрузку, создаваемую крутящим моментом на различные приводные механизмы, и тому подобное. Дополнительные датчики могут быть предусмотрены на забойных конвейерах 16, 18, разгрузочном конвейере 12, отвальном конвейере 26 и бункере 28 для контроля за материалом, который транспортируется по системе. В связи с этим, центральная система управления может быть выполнена с возможностью управления, среди прочего, скоростью конвейера, положением бункера, положением конвейера и тому подобное. Например, контроллер может быть выполнен с возможностью управления всеми аспектами «зигзагообразного» продвижения вперед обсуждаемых выше забойных конвейеров 16, 18, контролируя направление и взаимное расположение бункера 28 относительно различных конвейерных секций 54. Как только бункер 28 продвинулся вперед достаточно далеко за конвейерную секцию 52, центральная система управления может автоматически управлять соответствующим устройством 54 перемещения конвейера для перемещения конвейерной секции 52 к очистному забою 14. Центральная система управления может автоматически управлять движением комбайна 10 во время обсуждаемой выше процедуры выполнения концевого разреза.
[0056] Аналогичная система также может быть реализована в отношении системы сплошной разработки, изображенной на Фиг.5. Выемочный комбайн 110 может содержать датчики для определения, среди прочего, положения шарнирных консолей 138, и скорости и крутящего момента двигателей 150 разрезающего узла, все из которых могут также управляться центральной системой управления. Кроме того, устройство 130 перемещения груза может содержать датчики для определения положений и нагрузки бурильного элемента 242 и приводов 224, а также датчики, связанные с крутящим моментом их соответствующих приводов. Поскольку центральная система управления также выполнена с возможностью управления работой различных двигателей, приводов и приводных механизмов, система может работать в замкнутом цикле, что требует минимального контроля от оператора. В некоторых вариантах выполнения один или несколько приводов 224 содержат линейный преобразователь, находящийся в сообщении с контроллером для обеспечения управления с обратной связью по положению соответствующей конвейерной секции. Одной из областей, где управление с обратной связью может быть особенно выгодно, является операция по слепому внедрению, описанная выше. Во время слепого внедрения центральная система управления может контролировать крутящий момент двигателей 150 режущих узлов 142, когда последние взаимодействуют с очистным забоем 14 под нагрузкой от движущей силы, обеспечиваемой выдвижением линейных приводов 224 устройств 130 перемещения груза. Если крутящий момент двигателя увеличился за пределы заданного порогового значения, то центральная система управления может замедлить или остановить выдвижение линейных приводов 224, пока значения крутящего момента двигателя не упадут ниже порогового значения. Центральная система управления может дополнительно выдвигать приводы 224, продолжая следить за крутящим моментом двигателей 150 режущих узлов.
[0057] Для содействия удаленной автоматизированной работе систем, изображенных на Фиг.1-4 и Фиг.5-12, все или некоторые из компонентов может быть оборудованы приемниками и/или передатчиками глобальной системы позиционирования ("GPS") или локальной системы позиционирования ("LPS"). Системы GPS и/или LPS обеспечивают возможность возвращения обратно в центральную систему управления в реальном времени полученной информации о положении различных компонентов. Для системы, изображенной на Фиг.1-4, некоторые из компонентов, которые могут содержать один или несколько приемников и/или передатчиков GPS и/или LPS, включают комбайн 10, разгрузочный конвейер 12, забойные конвейеры 16, 18 (в том числе некоторые или все конвейерные секции 52) и бункеры 28. Поскольку он выполнен с возможностью корректировки своей ориентации относительно очистного забоя 14, комбайн 10, в частности, может содержать несколько приемников и/или передатчиков GPS и/или LPS, так что может быть определена конкретная ориентация комбайна 10 относительно очистного забоя 14. Например, первый приемник/передатчик GPS/LPS может быть расположен на бурильной головке 34 или рядом с ней, а второй приемник/передатчик GPS/LPS может быть расположен возле задней части комбайна непрерывного действия рядом с отвальным конвейером 26. Для системы, изображенной на Фиг.5-12, некоторые из компонентов, которые могут содержать один или несколько приемников и/или передатчиков GPS и/или LPS содержат выемочный комбайн 110, разгрузочную часть 124, дробилку 128, устройства 130 перемещения груза и забойные скребковые конвейеры 116, 118 (в том числе некоторые или все конвейерные секции 174). Системы GPS и/или LPS обеспечивают центральную систему управления возможностью мониторинга и управления горизонтом подрубки (вертикальная плоскость) очистного забоя 14, а также положением и взаимным расположением основных компонентов системы. Специфические характеристики системы GPS предоставляют некоторые ограничения для мониторинга положения в вертикальной плоскости. По этой причине система GPS может быть дополнена специализированной системой LPS, которая содержит один или несколько передатчиков и/или приемников, имеющих фиксированные и известные положения вблизи открытых разработок. Дополнительная система LPS может использоваться самостоятельно или в сочетании с системой GPS, чтобы обеспечить более точное определение положений различных компонентов, особенно в вертикальной плоскости.
Изобретение относится к системам открытой разработки для удаления материала из очистного забоя, а также к способу продвижения системы сплошной открытой разработки и устройству перемещения компонента в указанной системе. Система содержит конвейер, проходящий по существу параллельно очистному забою; комбайн, поддерживаемый конвейером и выполненный с возможностью перемещения вдоль конвейера. Устройство перемещения конвейера, связанное с конвейером и выполненное с возможностью продвижения конвейера и выемочного комбайна и прижатия второй режущей поверхности выемочного комбайна к очистному забою, для удаления материала очистного забоя при перемещении выемочного комбайна в направлении, по существу перпендикулярном очистному забою. Способ продвижения системы сплошной открытой разработки в целом включает перемещение выемочного комбайна системы сплошной разработки вдоль забойного конвейера; приведение в действие устройства перемещения груза для продвижения забойного конвейера и выемочного комбайна системы сплошной разработки к очистному забою. Переустановку первой группы устройств перемещения груза, а затем переустановку второй группы устройств перемещения груза. Устройство перемещения груза в целом содержит привод, устройство бурения земли, соединенное с частью привода и выполненное с возможностью перемещения относительно нее, и раму, соединенную с другой частью привода и выполненную с возможностью перемещения относительно нее. 3 н. и 21 з.п. ф-лы, 12 ил.
1. Система открытой разработки для удаления материала из очистного забоя, содержащая:
конвейер, проходящий по существу параллельно очистному забою,
выемочный комбайн, поддерживаемый конвейером и выполненный с возможностью перемещения вдоль конвейера, причем выемочный комбайн имеет первую режущую поверхность для удаления материала из очистного забоя во время перемещения выемочного комбайна в направлении, по существу параллельном очистному забою, и вторую режущую поверхность для удаления материала из очистного забоя во время перемещения выемочного комбайна в направлении, по существу перпендикулярном очистному забою, и
устройство перемещения конвейера, связанное с конвейером и выполненное с возможностью продвижения конвейера и выемочного комбайна к очистному забою, причем устройство перемещения конвейера выполнено с возможностью прижатия второй режущей поверхности к очистному забою.
2. Система по п.1, в которой вторая режущая поверхность пробуривает по существу цилиндрическое отверстие в очистном забое, когда она прижата к очистному забою устройством перемещения конвейера.
3. Система по п.1, в которой конвейер содержит направляющие, а выемочный комбайн содержит опоры, выполненные с возможностью взаимодействия с направляющими.
4. Система по п.1, в которой конвейер и устройство перемещения конвейера поддерживаются и становятся устойчивыми исключительно путем взаимодействия с землей.
5. Система по п.1, в которой устройство перемещения конвейера содержит бурильный элемент для взаимодействия с землей, причем бурильный элемент оказывает сопротивление силам, связанным с перемещением выемочного комбайна вдоль конвейера и с удалением материала из очистного забоя.
6. Система по п.1, в которой выемочный комбайн содержит двигатель режущего узла для вращения второй режущей поверхности и датчик вращающего момента для измерения вращающего момента двигателя режущего узла, причем система дополнительно содержит контроллер, находящийся в сообщении с датчиком вращающего момента и устройством перемещения конвейера, при этом контроллер управляет работой устройства перемещения конвейера в ответ на изменения во вращающем моменте двигателя режущего узла, когда вторая режущая поверхность прижата к очистному забою.
7. Система по п.6, в которой устройство перемещения конвейера содержит привод для продвижения конвейера к очистному забою, причем контроллер приводит в действие привод для поддержания вращающего момента двигателя режущего узла ниже порогового значения.
8. Система по п.1, в которой устройство перемещения конвейера содержит привод, имеющий первую часть и вторую часть, выполненную с возможностью перемещения относительно первой части, устройство для бурения земли, соединенное с первой частью и выполненное с возможностью перемещения относительно первой части, и раму, соединенную со второй частью и выполненную с возможностью перемещения относительно второй части, причем устройство для бурения земли содержит бурильный элемент, имеющий ось бурения и привод для вращения бурильного элемента вокруг оси бурения и для перемещения бурильного элемента аксиально вдоль оси бурения, при этом рама соединена с конвейером так, что перемещение первой части относительно второй части вызывает перемещение устройства для бурения земли относительно конвейера.
9. Система по п.8, в которой бурильный элемент является по существу кольцевым.
10. Система по п.8, в которой привод является линейным приводом и содержит линейный преобразователь.
11. Система по п.8, дополнительно содержащая гидравлический насос, соединенный либо с устройством для бурения земли, либо с рамой и выполненный с возможностью перемещения с одним из них, причем гидравлический насос обеспечивает гидравлическую энергию для приведения в действие привода и приводного механизма.
12. Система по п.8, в которой привод придает конвейеру устойчивость и управляет вертикальной нагрузкой, приложенной к подошве конвейера, путем приведения в действие для аксиального перемещения бурильного элемента без вращения бурильного элемента и без существенного перемещения бурильного элемента относительно земли.
13. Способ продвижения системы сплошной открытой разработки, содержащей забойный конвейер, проходящий по существу параллельно очистному забою, выемочный комбайн системы сплошной разработки, поддерживаемый забойным конвейером и выполненный с возможностью перемещения вдоль забойного конвейера, и несколько устройств перемещения груза, присоединенных к забойному конвейеру, при этом способ включает:
удаление материала из очистного забоя путем перемещения выемочного комбайна системы сплошной разработки вдоль конвейера,
приведение в действие нескольких устройств перемещения груза для продвижения забойного конвейера и выемочного комбайна системы сплошной разработки к очистному забою,
приведение во взаимодействие режущей поверхности выемочного комбайна системы сплошной разработки с очистным забоем так, что режущая поверхность врезается в очистной забой,
переустановку первой группы из указанных нескольких устройств перемещения груза для приготовления указанной первой группы для последующей операции по перемещению забойного конвейера, причем переустановку выполняют, когда вторая группа из указанных нескольких устройств перемещения груза остается по существу неподвижной,
при этом после переустановки указанной первой группы из нескольких устройств перемещения груза выполняют переустановку указанной второй группы из нескольких устройств перемещения груза для выполнения последующей операции по перемещению забойного конвейера, причем переустановку указанной второй группы из нескольких устройств перемещения груза выполняют, когда указанная первая группа из нескольких устройств перемещения груза остается по существу неподвижной.
14. Способ по п.13, в котором каждое устройство перемещения груза содержит бурильный элемент, выполненный с возможностью взаимодействия с землей, и привод, присоединенный между бурильным элементом и забойным конвейером, причем при приведении в действие нескольких устройств перемещения груза для перемещения забойного конвейера также приводят в действие приводы для перемещения забойного конвейера относительно бурильных элементов.
15. Способ по п.14, в котором при переустановке указанной первой группы из нескольких устройств перемещения груза извлекают из земли бурильные элементы указанной первой группы из нескольких устройств перемещения груза, приводят в действие приводы указанной первой группы из нескольких устройств перемещения груза для продвижения бурильных элементов указанной первой группы из нескольких устройств перемещения груза к забойному конвейеру и выдвигают бурильные элементы указанной первой группы из нескольких устройств перемещения груза обратно в землю.
16. Способ по п.15, в котором при переустановке указанной второй группы из нескольких устройств перемещения груза извлекают из земли бурильные элементы указанной второй группы из нескольких устройств перемещения груза, приводят в действие приводы указанной второй группы из нескольких устройств перемещения груза для продвижения бурильных элементов указанной второй группы к забойному конвейеру и выдвигают бурильные элементы указанной второй группы из нескольких устройств перемещения груза обратно в землю.
17. Способ по п.14, в котором каждое устройство перемещения груза содержит привод для перемещения бурильного элемента вдоль оси бурения, при этом в способе дополнительно приводят в действие привод без перемещения бурильного элемента для приложения вертикально направленной силы к подошве забойного конвейера.
18. Способ по п.13, в котором выемочный комбайн системы сплошной разработки содержит двигатель режущего узла и датчик вращающего момента двигателя режущего узла, причем режущая поверхность выемочного комбайна системы сплошной разработки взаимодействует с очистным забоем во время приведения в действие указанных нескольких устройств перемещения груза для продвижения забойного конвейера и выемочного комбайна системы сплошной разработки к очистному забою, а система сплошной открытой разработки содержит контроллер, находящийся в сообщении с датчиком вращающего момента двигателя и с устройством перемещения груза для управления его работой, при этом в способе дополнительно контролируют вращающий момент двигателя режущего узла во время взаимодействия режущей поверхности выемочного комбайна системы сплошной разработки с очистным забоем и регулируют работу устройства перемещения груза в ответ на изменения во вращающем моменте двигателя режущего узла.
19. Способ по п.13, в котором взаимодействие режущей поверхности выемочного комбайна системы сплошной разработки с очистным забоем осуществляют после приведения в действие указанных нескольких устройств перемещения груза для продвижения забойного конвейера и выемочного комбайна системы сплошной разработки к очистному забою.
20. Способ по п.19, в котором дополнительно поднимают режущую поверхность над очистным забоем перед приведением в действие указанных нескольких устройств перемещения груза, чтобы переместить забойный конвейер и указанный выемочный комбайн к очистному забою, и перемещают режущую поверхность вниз до контакта с верхней поверхностью очистного забоя после приведения в действие указанных нескольких устройств перемещения груза, чтобы переместить забойный конвейер и выемочный комбайн к очистному забою.
21. Устройство перемещения груза, выполненное с возможностью перемещения компонента в системе открытой разработки, содержащее:
привод, содержащий первую часть и вторую часть, выполненную с возможностью перемещения относительно первой части,
устройство бурения земли, соединенное с первой частью, выполненное с возможностью перемещения относительно нее и содержащее бурильный элемент, имеющий ось бурения, и привод для вращения бурильного элемента вокруг оси бурения и для перемещения бурильного элемента аксиально вдоль оси бурения, и
раму, соединенную со второй частью и выполненную с возможностью перемещения относительно нее, при этом рама выполнена с возможностью соединения с компонентом так, что перемещение первой части относительно второй части вызывает перемещение устройства бурения земли относительно компонента.
22. Устройство по п.21, в котором бурильный элемент имеет по существу кольцевую форму.
23. Устройство по п.21, в котором привод представляет собой линейный привод и содержит линейный преобразователь.
24. Устройство по п.21, дополнительно содержащее гидравлический насос, соединенный либо с устройством бурения земли, либо с рамой и выполненный с возможностью перемещения вместе с ними, причем гидравлический насос обеспечивает гидравлическую энергию для приведения в действие привода и приводного механизма.
| Способ автоматизированной струговой выемки угля в лаве | 1991 |
|
SU1836557A3 |
| Способ разработки россыпных месторождений и самоходный передвижной конвейер для его осуществления | 1985 |
|
SU1262037A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ СЕКЦИИ КРЕПИ И КОНВЕЙЕРА | 2002 |
|
RU2234607C2 |
| RU 2059069 C1, 27.04.1996 | |||
| Прибор для эпидиа- и микропроектирования | 1930 |
|
SU22955A1 |
| US 4118072 A, 03.10.1978 | |||
| US 5624162 А, 29.04.1997 | |||
| US 4096753 A1, 27.06.1978 | |||
| US 3378303 A1, 16.04.1968. | |||

