Изобретение относится к области добычи угля подземным способом, а именно, с помощью механизированных комплексов для отработки маломощных пластов.
Известно устройство для передвижения секции крепи и конвейера, включающее основание, гидроцилиндр передвижения, шток которого закреплен на основании, а цилиндр - на конвейере (секция крепи комплекса МК. //Уголь. – 1995, №3, с.11).
Недостатками известного устройства являются:
1. Выдвижение секции крепи штоковой полостью гидроцилиндра передвижения, что сопровождается при заданной величине усилия передвижения, большим диаметром цилиндра по сравнению с выдвижкой секции крепи поршневой полостью. Следствием этого являются трудности размещения такого гидроцилиндра передвижения в секции крепи, предназначенной для отработки маломощных пластов.
2. Гидроцилиндр передвижения размещается в зоне перемещения обслуживающего крепь персонала, что не позволяет использовать крепь для отработки маломощных пластов.
Известно устройство (патент РФ №2133828, кл. Е 21 D 23/14, 23/08, 23/04, опуб. 27.07.1999), включающее основание, состоящее из полозов, связанных в забойной части между собой балкой, опору, конвейер, направляющую, закрепленную на конвейере, гидроцилиндр передвижения, один конец которого закреплен на опоре, а другой – на направляющей, в котором основание снабжено подвижно установленным ползуном, взаимодействующим с направляющей, на котором закреплена опора, причем ползун выполнен с гидроцилиндром подъема.
Недостатком такого устройства является то, что нижнй предел вынимаемой мощности пласта определяется с учетом возможности перемещения точки крепления штока гидроцилиндра передвижения с опорой в вертикальной плоскости. Это перемещение является следствием того, что опора принадлежит основанию, положение которой в вертикальной плоскости относительно направляющей (почвы) может меняться (наезд основания на уступы в почве, принудительный подъем его, исходя из технологии отработки пласта или утопание основания). Этот недостаток не позволяет понизить величину нижнего предела вынимаемой мощности секции крепи.
Предлагаемым изобретением решается задача снижения нижнего предела вынимаемой мощности секции крепи.
Для достижения указанного технического результата в устройстве для передвижения секции крепи и конвейера, включающем основание, состоящее из полозов, связанных в забойной части между собой балкой, опору, конвейер, направляющую, закрепленную на конвейере, гидроцилиндр передвижения, один конец которого закреплен на опоре, а другой – на направляющей, ползун, подвижно установленный на основании и взаимодействующий с направляющей, балка выполнена с отверстием, в котором подвижно установлен ползун, на котором установлена плита с жестко соединенной опорой, выполненной с пазом для шарнирного соединения с гидроцилиндром передвижения.
При этом основание может быть снабжено подвижной скобой с ограничителями, установленной в дополнительных отверстиях, выполненных в балке, ползун выполнен в виде гидроцилиндра подъема, шток которого взаимодействует со скобой, а плита выполнена с проточкой, ползун и гидроцилиндр подъема выполнены с буртиком.
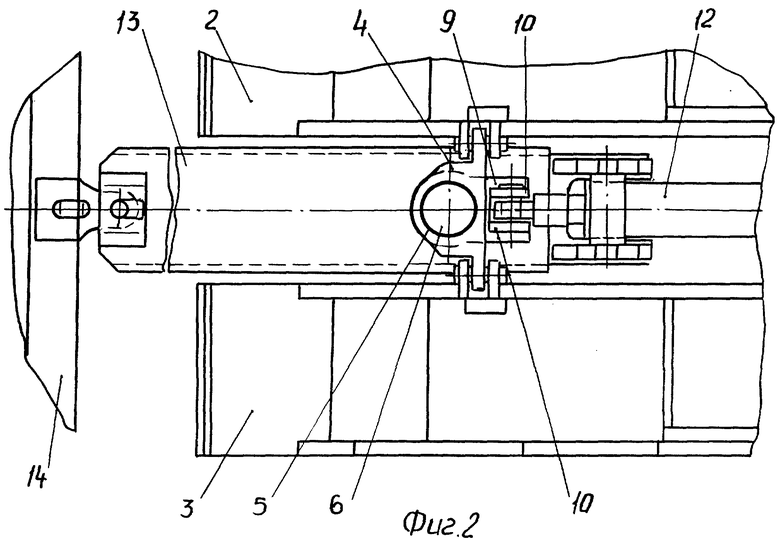
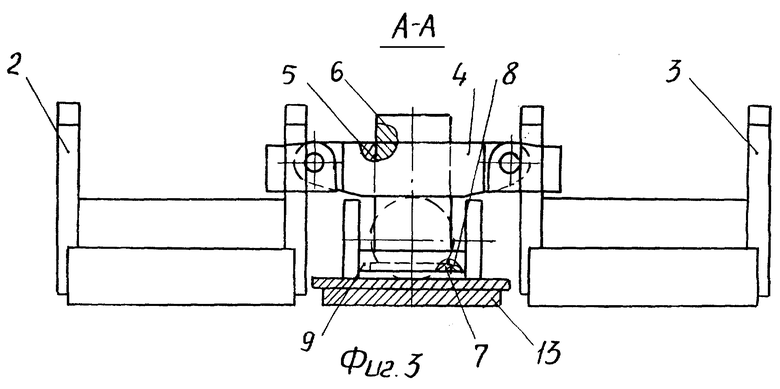
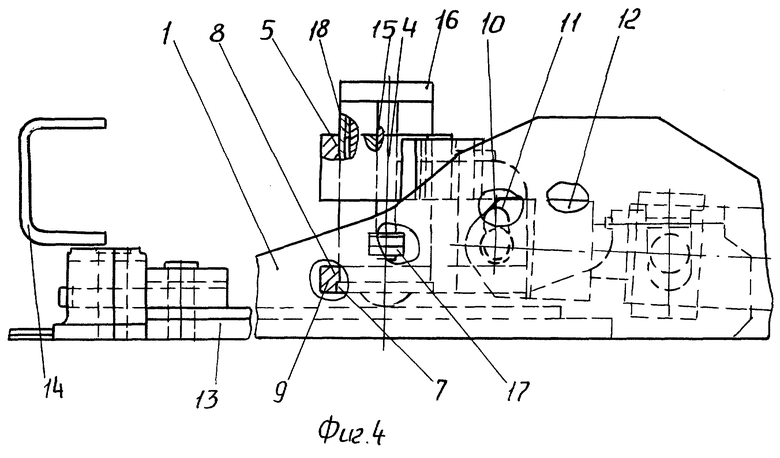
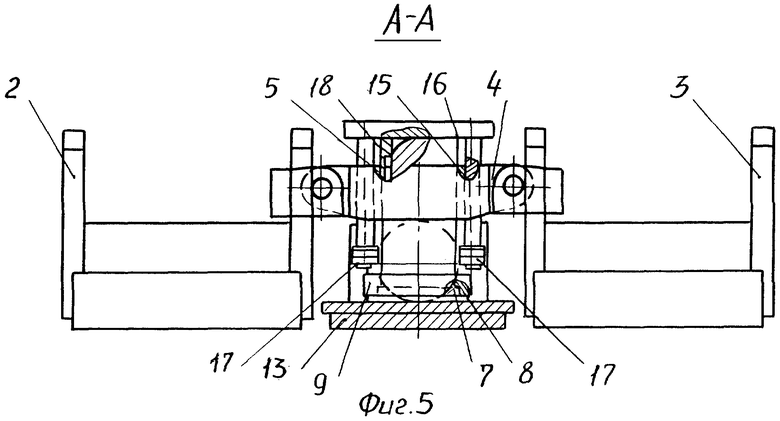
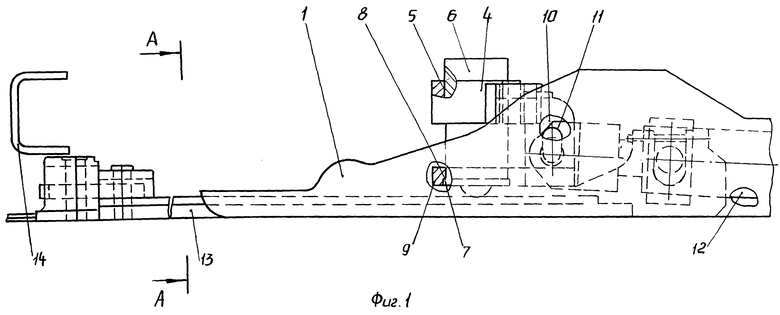
Предлагаемое изобретение поясняется чертежами, где на фиг.1 изображено устройство для передвижения секции крепи и конвейера, вид сбоку; на фиг.2 – вид сверху; на фиг.3 - разрез А-А на фиг.1; на фиг.4 - вид сбоку при выполнении ползуна – гидроцилиндром подъема; на фиг.5 - разрез А-А при выполнении ползуна в виде гидроцилиндра подъема.
Устройство для передвижения секции крепи и конвейера состоит из основания 1, включающего полозы 2 и 3, соединенные между собой известным способом (жестко или с возможностью относительного вращения), балкой 4 с отверстием 5.
На основании подвижно установлен ползун 6 с буртиком 7, на котором проточкой 8 установлена плита 9 с жестко соединенной опорой 10, взаимное расположение которых представляет собой Г-образную форму. Опора 10 имеет паз 11 шарнирного соединения со штоком гидроцилиндра передвижения 12, цилиндр которого соединен с направляющей 13, связанной с конвейером 14.
При исполнении устройства для передвижения секции крепи и конвейера с принудительным подъемом забойных носков основания 1 балка 4 снабжается дополнительными отверстиями 15, в которые устанавливается скоба 16 с ограничителями 17, а отверстие 5 снабжается гидроцилиндром подъема 18, цилиндр которого выполняется с буртиком 7, а шток взаимодействует со скобой 16.
Устройство для передвижения секции крепи и конвейера работает следующим образом.
В исходном положении (фиг.1, 2, 3) основание 1 располагается на почве пласта и отстоит от конвейера 14 как минимум на шаг передвижки секции. Ползун 6 под действием собственного веса опирается на направляющую 13, которая также располагается на почве. Плита 9 с опорой 10 под действием собственного веса находится в нижнем положении, при этом проточка 8 плиты 9 опирается на буртик 7 ползуна 6. Гидроцилиндр передвижения 12 размещается на почве пласта и расстояние от почвы до шарнира крепления штока гидроцилиндра передвижения 12 с опорой 10 минимальное и зависит только от величины диаметра гидроцилиндра передвижения, необходимого для создания заданного усилия.
При подаче давления в поршневую полость гидроцилиндра передвижения 12, так как его цилиндр закреплен на направляющей 13, происходит выдвижка его штока. Это движение посредством опоры 10, плиты 9, ползуна 6 и балки 4 передается полозам 2 и 3, вследствие чего основание 1 передвигается на шаг передвижки. В процессе движения основания 1, под действием собственных масс, ползун 6 опирается на направляющую 13, плита 9 с опорой 10 находится в нижнем положении, проточка 8 опирается на буртик 7, а гидроцлиндр передвижения 12 размещается на почве пласта. В результате чего расстояние от почвы до шарнира крепления штока гидроцилиндра передвижения 12 с опорой 10 не изменяется.
При движении основания 1 положение гидроцилиндра передвижения 12 относительно продольной оси основания в плане не изменяется, так как, при необходимости, либо опора 10 с плитой 9 и ползуном 6 могут ограниченно поворачиваться в отверстии 5 балки 4 (при жестком креплении плиты 9 на ползуне 6), либо плита 9 с опорой 10 ограниченно поворачивается относительно ползуна 6 (при вращательном креплении плиты 9 с опорой 10 и ползуном 6).
В процессе движения основания 1 положение полозов 2 и 3, в вертикальной плоскости относительно направляющей 13, может изменяться:
1. При наезде полозов 2 и 3 на уступ в почве пласта они поднимаются относительно направляющей 13. При этом отверстие 5 балки 4 перемещается вверх относительно ползуна 6, а положение последнего, а также плиты 9, опоры 10 и гидроцилиндра передвижения 12 относительно направляющей 13 не изменяется (действие веса этих элементов).
2. При наличии в почве впадин, полозы 2 и 3 опускаются относительно направляющей 13. При этом балка 4 перемещается вниз относительно ползуна 6 до тех пор, пока нижняя плоскость отверстия 5 не войдет в контакт с верхней поверхностью плиты 9. Положение ползуна 6, плиты 9, опоры 10 и гидроцилиндра передвижения 12 относительно направляющей 13 не изменяется (действие веса этих элементов). Величина опускания основания задается.
3. При относительном смещении полозов 2 и 3, паз 11 исключает поворот штока гидроцилиндра передвижения 12 относительно его цилиндра и следовательно исключается деформация гидроцилиндра передвижения 12 из-за перекоса шарнирных соединений его с опорой 10 и направляющей 13.
Для выдвижки конвейера 14 подают давление в штоковую полость гидроцилиндра передвижения 12. При этом положение ползуна 6, плиты 9, опоры 10 и гидроцилиндра передвижения 12 относительно направляющей 13 не изменяется (действие веса этих элементов).
Устройство для передвижения секции крепи и конвейера, при использовании устройства с принудительным подъемом забойных носков основания, работает следующим образом.
В исходном положении (фиг.4 и 5) основание 1 располагается на почве пласта и отстоит от конвейера 14, как минимум, на шаг передвижки секции. Скоба 16 находится под действием собственного веса в нижнем положении. При этом между ограничителями 17 и нижними поверхностями дополнительных отверстий 15 образуется зазор (заданная величина опускания полозов 2 и 3 относительно направляющей 13). Гидроцилиндр подъема 18 сжат и под действием собственного веса опирается на направляющую 13, а штоком, при этом, взаимодействует со скобой 16. Положение плиты 9 с опорой 10, гидроцилиндра передвижения 12 аналогично вышеописанному (фиг.1, 2 и 3).
Таким образом, как видно из описания, предлагаемое изобретение позволяет, независимо от положения полозов основания относительно направляющей, сохранять постоянным расстояние от нижней плоскости направляющей до точки крепления штока гидроцилиндра передвижения и, следовательно, снизить величину нижнего предела вынимаемой мощности секции крепи.
Изобретение относится к горному делу и может быть использовано при добыче угля подземным способом с помощью механизированных комплексов. Устройство включает основание, состоящее из полозов, связанных в забойной части между собой балкой, опору, конвейер, направляющую, закрепленную на конвейере, гидроцилиндр передвижения, один конец которого закреплен на опоре, а другой - на направляющей, ползун, подвижно установленный на основании и взаимодействующий с направляющей. Балка выполнена с отверстием, в котором подвижно установлен ползун, на котором установлена плита с жестко соединенной опорой, выполненной с пазом для шарнирного соединения с гидроцилиндром передвижения. Основание может быть снабжено подвижной скобой с ограничителями, установленной в дополнительных отверстиях, выполненных в балке, а ползун - в виде гидроцилиндра подъема, шток которого взаимодействует со скобой. Плита может быть выполнена с проточкой, а ползун и цилиндр гидроцилиндра подъема - с буртиком. Изобретение направлено на повышение эффективности работы. 2 з п. ф-лы, 5 ил.
| СЕКЦИЯ ГИДРАВЛИЧЕСКОЙ ШАГАЮЩЕЙ КРЕПИ | 1997 |
|
RU2133828C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1995 |
|
RU2078938C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| Механизм связи крепи с выемочной машиной фронтального агрегата | 1990 |
|
SU1796034A3 |
| DE 4035252 A1, 16.05.1991 | |||
| US 5100263 A, 31.03.1992 | |||
| DE 4401240 A1, 20.07.1995 | |||
| DE 4205940 A1, 02.09.1993. | |||

