Изобретение относится к области военной техники и, в частности, к бортовому оборудованию самолетов, танков и кораблей, обеспечивающему применение средств поражения, в частности, по наземным и надводным запрограммированным неподвижным и подвижным целям.
Известны технические решения, направленные на повышение эффективности стрельбы из вооружения, установленного на подвижных объектах (Гришутин В.Г. Лекции по авиационным системам стрельбы, Киев, КВВАИУ, 1980 г., с. 354-357 [1]. Мубаракшин Р.В. и др. "Прицельные системы стрельбы", часть 1, Москва, ВВИА им. Жуковского, 1973 г., с. 55-66. с. 96-99 [2]. Бабич О.А. "Обработка информации в навигационных комплексах", Москва, Машиностроение, 1991 г., с. 485-491 [3]). Так, например, комплексная система ([2]. с. 96-99) содержит бортовую оптико-локационную станцию (БОЛС), бортовую радиолокационную станцию (БРЛС), блок коммутации параметров (БКП). При этом, например, при отказе (отключении по тактической необходимости) БРЛС и при погодных условиях, не соответствующих области устойчивой работы БОЛС, комплексная система становится неработоспособной. Кроме того, при условии подавления высокочастотных погрешностей БОЛС и БРЛС ([2], с. 114-117), например, при отказе (отключении по условиям применения или техническим требованиям) БОЛС, имеющие место систематические погрешности БРЛС по дальности и углам визирования цели, приводят к соответствующим погрешностям целеуказания и применения средств поражения.
Техническим результатом, достигаемым при использовании известного аналогичного технического решения, является повышение надежности и точности работы комплексной системы (патент RU №2161777, 10.01.2001 [4]), что обеспечивается тем, что в комплексную прицельную систему, содержащую бортовую оптико-локационную станцию, бортовую радиолокационную станцию и блок коммутации параметров, на первый, второй и третий входы которого подключены соответственно первый и второй выходы бортовой оптико-локационной станции и первый выход бортовой радиолокационной станции, дополнительно введены включенные между первым выходом и четвертым входом блока коммутации параметров последовательно соединенные блок интегрирования и блок разности, а также объединенные в кольцо блок формирования параметрических функций, блок выделения систематических погрешностей, блок запоминания, инерциально-спутниковая система, второй выход которой подключен ко входам бортовой оптико-локационной станции и бортовой радиолокационной станции, вторые выходы которых подключены соответственно ко второму и третьему входам блока разности, второй выход которого подключен к пятому входу блока коммутации параметров, второй и третий выходы которого подключены соответственно ко второму входу блока запоминания и к третьему входу блока выделения систематических погрешностей, второй вход которого объединен с третьим выходом инерциально-спутниковой системы и шестым входом блока коммутации параметров.
Однако имеющие место систематические погрешности БРЛС по дальности и углам визирования цели, особенно при неблагоприятных погодных условиях в месте нахождения цели приводят к соответствующим погрешностям целеуказания и применения средств поражения, прицельное устройство, работающее только в одном из диапазонов длин волн, малоэффективно, т.к. не может удовлетворить всем требованиям в полной мере так, как применение одного видимого диапазона не обеспечивает требований круглосуточности и всепогодности действия, а использование только радиоволн не удовлетворяет требованию скрытности действия и точности измерения угловых координат (до 3 угл. мин).
Технико-экономическим эффектом, достигаемым при использовании также известного технического решения (патент RU №2119646, 27.09.1998 [5]), является обеспечение применения оружия днем и ночью в простых и сложных метеоусловиях и, как следствие этого, повышение эффективности поражения цели, что достигается тем, что в систему прицеливания, содержащую первый индикатор, оптическое визирное устройство, блок управления, первый блок датчиков углов, первый блок датчиков угловых скоростей, вычислитель угловых поправок, дифференциальное устройство, блок датчиков исходной информации, систему управления оружием, вход которой подключен к выходу дифференциального устройства, на первый вход которого подключен выход вычислителя угловых поправок, на первый вход которого подключен блок датчиков исходной информации, причем первый блок датчиков углов и первый блок датчиков угловых скоростей, кинематически связанных с оптическим визирным устройством, кинематически связанным с первым индикатором и блоком управления, а на вход оптического визирного устройства подключен первый выход блока управления, дополнительно введены второе визирное устройство, работающее в инфракрасном диапазоне длин волн, второй индикатор, второй блок датчиков углов, второй блок датчиков угловых скоростей, третье визирное устройство, работающее в миллиметровом и сантиметровом диапазоне длин волн, третий индикатор, третий блок датчиков углов, третий блок датчиков угловых скоростей, первый блок коммутации, второй блок коммутации, формирователь эталонной дальности и устройство сравнения, подключенное своими первым и вторым входами соответственно к выходам формирователя эталонной дальности и блоку датчиков исходной информации, устройство сравнения, первый и второй выходы которого подключены соответственно ко входу блока коммутации и второго блока коммутации, контактные группы которых имеют нормально-замкнутое положение при нулевых сигналах на входах, причем первый выход блока управления подключен ко входам второго визирного устройства и третьего визирного устройства, кинематически связанных соответственно со вторым блоком датчиков углов, вторым блоком датчиков угловых скоростей, третьим блоком датчиков углов третьим блоком датчиков угловых скоростей, на вход второго индикатора подключен выход второго визирного устройства; на вход третьего индикатора подключен выход третьего визирного устройства, второй и третий выходы блока управления подключены соответственно к первому и второму входам формирователя эталонной дальности; выходы первого блока датчиков углов второго блока датчиков углов, первого блока датчиков угловых скоростей, второго блока датчиков угловых скоростей подключены соответственно к первому, второму, третьему и четвертому контактам контактной группы первого блока коммутации, пятый и шестой контакты контактной группы которого подключены соответственно к первому и третьему контактам контактной группы второго блока коммутации, на второй и четвертый контакты контактной группы которого подключены соответственно выходы третьего блока датчиков углов и третьего блока датчиков угловых скоростей, при этом на вторые входы вычислителя угловых поправок и дифференциального устройства подключен пятый контакт контактной группы второго блока коммутации, шестой контакт контактной группы которого подключен к третьему входу вычислителя поправок.
Известный способ повышения эффективности стрельбы [5] позволяет осуществлять поиск, обнаружение, опознавание целей и слежение за ними днем и ночью, автоматическое вычисление и ввод углов прицеливания и бокового упреждения непосредственно в угловое положение оружия с учетом баллистических характеристик снаряда, дальности до цели и отклонении условий стрельбы от нормальных. Однако известный способ не позволяет произвести оценку могущества действия выбранного типа боеприпаса по цели, а также не учитывает дальность эффективного огня, что приводит к снижению вероятности поражаемой цели.
Также известным техническим решением (патент RU №2522473 С1, 20.07.2014 [6]) решается задача, позволяющая автоматически учитывать могущество действия различных типов танкового выстрела по цели на разной дальности стрельбы. При этом способ повышения эффективности стрельбы из танкового вооружения основан на том, что дополнительно установленный блок эффективности стрельбы производит анализ сигналов, поступающих от лазерного дальномера и блока переключения баллистик. В случае, когда замеренная дальность превышает расчетную дальность эффективной стрельбы выбранным типом боеприпаса, блок оценки эффективности подает сигнал в блок индикации. В поле зрения прицела-дальномера - прибора наведения наводчика индикатор «выбранный тип баллистики» начинает прерывисто мигать, сигнализируя наводчику о нецелесообразности применения выбранного типа боеприпаса на замеренной дальности.
При этом известный способ повышения эффективности стрельбы из танкового вооружения включает совокупность взаимодействующих электронно-оптических приборов и автоматических систем, обеспечивающих поиск, обнаружение, опознавание целей и слежение за ними днем и ночью из неподвижного танка и в движении; автоматическое заряжание пушки выбранным типом боеприпаса; автоматическое вычисление и ввод поправок на температуру воздуха, износ канала ствола, атмосферное давление, боковой ветер, блок оценки эффективности стрельбы, производящий анализ сигналов, поступающих от лазерного дальномера и блока переключения баллистик, в случае, когда замеренная дальность до цели превышает дальность эффективного огня, выбранным типом выстрела, через блок индикации в поле зрения прицела-дальномера - прибора наведения происходит информирование наводчика путем прерывистого мигания индикатора «выбранный тип баллистики» о нецелесообразности выбора данного типа боеприпаса на замеренной дальности.
Однако в известных способах повышения эффективности стрельбы решение задачи сводится к повышению эффективности стрельбы одной боевой единицей. При этом отсутствует элемент задачи планирования и проведения пристрелки артиллерийского вооружения группы боевой техники по заданной цели, а именно определения, в какой последовательности должны проводить выстрелы.
Проблема состоит в том, что, с одной стороны, при противодействии противника, интервал времени проведения пристрелки должен быть минимизирован, а с другой - необходимо, чтобы выстрел конкретной боевой единицы должен быть точно соотнесен с разрывом его снаряда, для корректировки его прицела его орудия. Данная задача особенно актуальна, например, для надводных кораблей. В условиях реального проведения боевых действий, соотнесение выстрела с корабля и момента разрыва снаряда в общем случае визуально практически невозможно. Это связано со многими причинами. В том числе, с относительно большой дальностью стрельбы, с малой горизонтальной видимостью за счет различных гидрометеорологических явлений. Особенно, за счет тумана и осадков. Таким образом, в сложных гидрометеорологических условиях необходимо заранее задать различные моменты стрельбы для каждого корабля в группе. Эти моменты стрельбы будут задавать порядок стрельбы кораблей. Зная этот порядок, наблюдатель-корректировщик может определить, какому конкретному кораблю соответствует наблюдаемый разрыв снаряда, и провести корректировку стрельбы этого корабля. Задачей предлагаемого технического решения является повышение вероятности поражения цели.
Поставленная задача решается за счет того, что в способе повышения эффективности стрельбы из вооружения самоходных объектов, включающем совокупность взаимодействующих электронно-оптических приборов и автоматических систем, обеспечивающих поиск, обнаружение, опознавание целей и слежение за ними днем и ночью из неподвижного самоходного объекта и в движении: автоматическое заряжание пушки выбранным типом боеприпаса; автоматическое вычисление и ввод поправок на температуру воздуха, износ канала ствола, атмосферное давление, боковой ветер, дополнительно вводится блок оценки эффективности стрельбы, производящий анализ сигналов, поступающих от лазерного дальномера и блока переключения баллистик, в случае, когда замеренная дальность до цели превышает дальность эффективного огня, выбранным типом выстрела, через блок индикации в поле зрения прицела-дальномера - прибора наведения происходит информирование наводчика путем прерывистого мигания индикатора «выбранный тип баллистики» о нецелесообразности выбора данного типа боеприпаса на замеренной дальности, в котором в отличие от прототипа [6], при групповой стрельбе из вооружения самоходных объектов, устанавливают порядок выстрелов, путем определения минимального интервала времени от момента первого выстрела отдельного самоходного объекта до момента разрыва последнего снаряда. Заявляемый способ может быть реализован посредством устройства прототипа [6], которое состоит из блока переключения баллистик, лазерного дальномера, блока оценки эффективности: баллистического вычислителя, блока индикации, кнопки замера дальности, поля зрения прицела-дальномера - прибора наблюдения. Как и в прототипе [6], при подготовке стрельбы, после определения цели для поражения, наводчик-оператор производит выбор типа боеприпаса путем установки переключателя типа баллистик, на блоке переключения баллистик в необходимое положение. Далее, нажатием кнопки замера дальности производится замер дальности до цели. Сигналы от блока переключения баллистик и лазерного дальномера поступают в блок оценки эффективности, где происходит сопоставление дальности эффективного огня выбранным типом боеприпаса с замеренной дальностью до цели. В случае, когда замеренная дальность превышает дальность эффективного огня выбранным типом боеприпаса, блок оценки эффективности подает сигнал в блок индикации, при этом в поле зрения прицела-дальномера - прибора наблюдения индикатор типа баллистики высвечивается прерывисто. Таким образом, происходит информирование наводчика о нецелесообразности применения выбранного боеприпаса на замеренной дальности. Пример работы способа. При подготовке стрельбы определяется тип боеприпаса переключателем на блоке переключения баллистик, нажатием кнопки замера дальности лазерный дальномер производит замер дальности до цели. Сигналы от блока переключения баллистик и лазерного дальномера поступают в баллистический вычислитель. В блоке оценки эффективности, где производится сопоставление дальности эффективного огня выбранным типом боеприпаса с замеренной дальностью до цели. В случае, когда замеренная дальность превышает дальность эффективного огня выбранным типом боеприпаса, блок оценки эффективности подаст сигнал в блок индикации, при этом в поле зрения прицела-дальномера - прибора наблюдения индикатор типа баллистики высвечивается прерывисто. Таким образом, происходит информирование наводчика о нецелесообразности применения выбранного боеприпаса на замеренной дальности.
Далее для обеспечения групповой стрельбы решается задача планирования и проведения пристрелки артиллерийского вооружения группы самоходных объектов, например, надводных кораблей по заданной цели, а именно - определения, в какой последовательности должны проводить выстрелы корабли.
В настоящее время, решение задачи выбора моментов стрельбы группой кораблей при пристрелке решается методом прямого перебора. Асимптотическая эффективность такого метода равна O(n2).
Предлагаемый способ основывается на следующем алгоритме.
Пусть имеется N кораблей, находящихся на различных расстояниях от цели. Интервал времени полета снаряда до цели от j-го корабля (j=1, N) обозначим τj. Для конкретного корабля этот интервал будет зависеть как от расстояния от корабля до цели, так и от скорости полета снаряда, то есть от типа артиллерийской установки.
Моменты разрывов снарядов ti(i=1, N) от различных кораблей должны быть различаемы, поэтому они должны быть разделены некоторым равным интервалом времени Δ. Очевидно, что моменты разрывов снарядов заданы и упорядочены естественным образом.
Момент выстрела j-го корабля Tj определяется очевидным соотношением Tj(i)=ti-τj. Задача состоит в том, чтобы найти такой порядок выстрелов {Tj(1), …, Tj(N)} для кораблей, при котором интервал времени от момента первого выстрела некоторого корабля Tj(1)=min(Tj(i)) до момента разрыва последнего снаряда tN, был бы минимален, т.е.

Решение этой задачи заключается в следующем
Упорядочим множество интервалов времени полета снарядов {τj} по не убыванию.
Получим упорядоченное множество {τj′}. Здесь j′ - порядковый номер j в отсортированном массиве.
Тогда искомым порядком выстрелов является такой порядок, при котором естественному порядку на множестве моментов разрывов снарядов {ti} должно соответствовать упорядочение по не убыванию множества соответствующих интервалов времени полета снарядов {τj}, то есть τj′(ti)≤τj′+1(ti+1).
При N=2, очевидно, что первым должен стрелять корабль, для которого τj′≤τj′+1, j=1, 2.
Пусть при некотором N выполнено указанное выше упорядочение, и предположим, что оно дает минимальное значение для (1). Справедливость указанного упорядочения для дополнительного (N+1)-го корабля основывается на следующем. Пусть для этого корабля время полета снаряда до цели равно τN+1. Рассмотрим «вставку» выстрела этого корабля в заданный уже порядок выстрелов для N кораблей. Пусть i0 соответствует наибольшему моменту разрывов, для которых τj′(ti)<τN+1 (i=1, i0). Для моментов ti, ti=1, i0 «вставка» выстрела N+1 корабля только увеличит значение (1). Для всех моментов ti с i>i0 «вставка» выстрела N+1 корабля не изменится (1).
Следовательно, указанное упорядочение выстрелов обеспечивает минимальное значение для (1).
Таким образом, алгоритм нахождения моментов выстрелов сводится к:
сортировке по не убыванию значений τj;
вычислению моментов времени Tj′(1)=ti-τj′(ti).
сортировке по возрастанию полученных значений Tj(i). Этот порядок и будет являться искомым порядком моментов стрельбы кораблей.
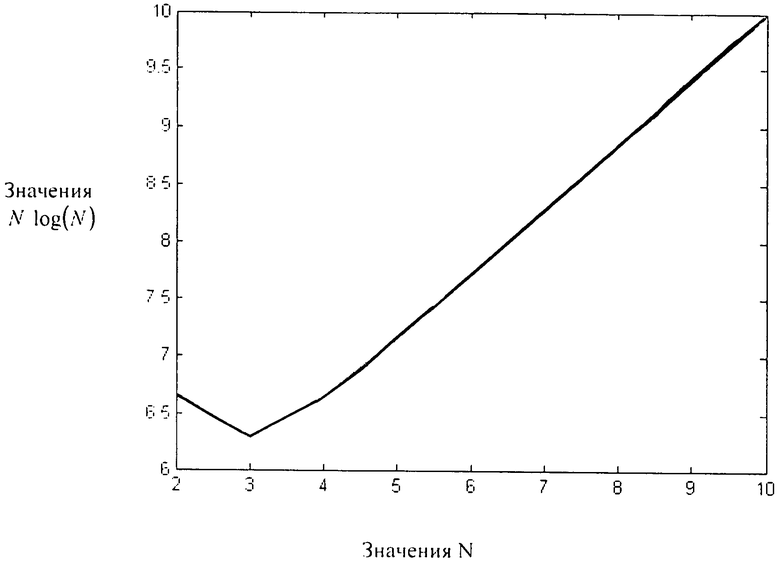
Оценим асимптотическую эффективность алгоритма. Основные затраты времени в алгоритме связаны с затратами времени на сортировку. Поэтому асимптотическая эффективность алгоритма равна O(N log N). Отношение эффективности применяемого алгоритма прямого перебора к эффективности предложенного алгоритма равно N/log (N).
Для малых N график этого отношения приведен на рисунке (фигура). Из него следует, что предложенный алгоритм в несколько раз эффективнее применяемого.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ СТРЕЛЬБЫ ИЗ ТАНКОВОГО ВООРУЖЕНИЯ | 2013 |
|
RU2522473C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ | 2007 |
|
RU2345312C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436030C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
Изобретение относится к военной технике и может быть использовано в вооружении самоходных объектов. Проводят из неподвижного танка и в движении поиск, обнаружение, опознавание целей, слежение за целями днем и ночью, автоматически заряжают пушку выбранным типом боеприпаса, автоматически вычисляют и вводят поправки на температуру воздуха, износ канала ствола, атмосферное давление, боковой ветер, дополнительно вводят блок оценки эффективности стрельбы, производят анализ сигналов от лазерного дальномера и блока переключения баллистик, выбирают тип выстрела в зависимости от замеренной дальности до цели и дальности эффективного огня, информируют наводчика прерывистым миганием индикатора «выбранный тип баллистики» о нецелесообразности выбора данного типа боеприпаса на замеренной дальности через блок индикации в поле зрения прицела-дальномера - прибора наведения, отличающийся тем, что при групповой стрельбе из вооружения самоходных объектов устанавливают порядок выстрелов, путем определения минимального интервала времени от момента первого выстрела отдельного самоходного объекта до момента разрыва последнего снаряда. Изобретение позволяет повысить вероятность поражения цели. 1 ил.
Способ стрельбы из вооружения самоходных объектов, включающий совокупность взаимодействующих электронно-оптических приборов и автоматических систем, обеспечивающих поиск, обнаружение, опознавание целей и слежение за ними днем и ночью из неподвижного самоходного объекта и в движении; автоматическое заряжание пушки выбранным типом боеприпаса: автоматическое вычисление и ввод поправок на температуру воздуха, износ канала ствола, атмосферное давление, боковой ветер, дополнительно вводится блок оценки эффективности стрельбы, производящий анализ сигналов, поступающих от лазерного дальномера и блока переключения баллистик, в случае, когда замеренная дальность до цели превышает дальность эффективного огня, выбранным типом выстрела, через блок индикации в поле зрения прицела-дальномера - прибора наведения происходит информирование наводчика путем прерывистого мигания индикатора «выбранный тип баллистики» о нецелесообразности выбора данного типа боеприпаса на замеренной дальности, отличающийся тем, что при групповой стрельбе из вооружения самоходных объектов устанавливают порядок выстрелов, путем определения минимального интервала времени от момента первого выстрела отдельного самоходного объекта до момента разрыва последнего снаряда.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| US 4220296 A1, 02.09.1980 | |||
| US 4741245 A1, 03.05.1988. | |||

