Изобретение относится к области вооружения и военной техники, в частности к комплексам вооружения боевых машин типа БМП, танков, БТР, БРДМ и т.п.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ стрельбы боевой машины (БМ) с закрытых позиций по ненаблюдаемой цели, включающий обнаружение и распознавание цели, определение топографических координат и высоты огневой позиции БМ с установленным на ней орудием над уровнем моря, выбор основного направления стрельбы, получение топографических координат цели и определение ее высоты над уровнем моря, выбор снаряда, введение поправок на отклонение условий стрельбы от табличных, на деривацию и при необходимости поправки угла прицеливания на угол места цели, назначение на основе исчисленных данных исходных установок стрельбы и отработку их относительно предварительно выбранного основного направления, стрельбе по цели /5. B.C.Кузнецов, Г.Ф.Платонов, М.А.Свистунов. Стрельба с закрытых позиций. Под ред. генерал-майора артиллерии С.С.Волкенштейна. Изд. Военной ордена Ленина академии бронетанковых войск им. И.В.Сталина, М., 1958, стр.23 (прототип)/.
Наиболее близким техническим решением, выбранным в качестве прототипа, является автоматизированная система управления огнем, включающая последовательно соединенные баллистический вычислитель (БВ) с системой датчиков входной информации, стабилизатор вооружения, блок управления (БУ), оптико-телевизионный прицел наводчика (ПН), а также телетепловизионный автомат сопровождения целей (АСОТТ), пульт командира (ПК) и пульт оператора (ПО), причем первые входы и первые выходы ПН, АСОТТ, БУ, стабилизатора, БВ, ПК и ПО соединены с цифровым каналом связи, четвертый вход и четвертый выход БУ соединены соответственно со вторым выходом и вторым входом АСОТТ, второй выход ПН соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен с третьим выходом ПО /2. Патент на изобр. №2351876. "Комплекс вооружения боевой машины", приоритетный №2007124061 от 26.06.2007, Бюл. №10 от 10.04.2009/.
Стрельба с закрытых позиций традиционно ведется артиллерией, в том числе самоходными артиллерийскими установками (САО). Совершенствование стрельбы с закрытых позиций танков и использование такого вида стрельбы для БТТ легкой весовой категории типа БМП-4, БМД-4, БТР-90 обусловлены несколькими причинами.
Увеличение насыщенности войск вероятного противника противотанковыми средствами (танками, противотанковыми пушками, БМП с противотанковыми управляемыми ракетами (ПТУР), наземными комплексами с ПТУР, РПГ) обуславливает необходимость подавления этих средств своим огнем или огнем поддержки артиллерии.
Повышение скоротечности и динамичности современного боя, обусловленное, в частности, развитием средств разведки, в том числе космического базирования, средств автоматической передачи данных, не позволяют тратить время на ожидание артиллерийских подразделений поддержки.
Кроме того, бронетанковая техника (танки, БМП, БМД) превосходят самоходную артиллерию по маневренности и времени подготовки к ведению стрельбы при смене позиции.
В настоящее время разработаны новые боеприпасы с увеличенной дальностью стрельбы, например с дальности 4-5 км для 100-миллиметровых снарядов 3УОФ17 до дальности 7 км для 3УОФ19, для которой вероятность прямой видимости мала.
В состав вычислительной системы средств бронетанковой техники типа БМП-3 входят принятые на вооружение в 80-х годах аналоговые баллистические вычислители (в БМП-3 - 1В539) с упрощенным стрельбовым алгоритмом. В связи с этим состав датчиков внешних условий стрельбы неполный, ввод данных с них - ручной, с пульта наводчика (давление, температура воздуха и заряда), точностные и динамические характеристики их требуют совершенствования. Стрельба с закрытых позиций по ненаблюдаемой цели при составе СУО существовавших до сих пор БМ не могла быть обеспечена.
Задачей предлагаемого комплекса вооружения является расширение функций и условий боевого применения БМ, в частности обеспечение стрельбы с закрытых позиций по ненаблюдаемой цели, более рациональное использование всей номенклатуры применяемых боеприпасов и режимов работы при решении боевых задач за счет совершенствования системы управления огнем (СУО) боевой машины (БМ).
Поставленная задача решается тем, что в известном способе стрельбы боевой машины по цели с закрытых позиций по ненаблюдаемой цели, включающем обнаружение и распознавание цели, определение топографических координат и высоты огневой позиции БМ с установленным на ней орудием над уровнем моря, выбор основного направления стрельбы, получение топографических координат цели и определение ее высоты над уровнем моря, выбор снаряда, введение поправок на отклонение условий стрельбы от табличных, на деривацию и при необходимости поправки угла прицеливания на угол места цели, назначение на основе исчисленных данных исходных установок стрельбы и отработку их относительно предварительно выбранного основного направления, стрельбе по цели, согласно изобретению вычислительные операции осуществляют с использованием блока управления (БУ) и баллистического вычислителя (БВ), при этом координаты БМ определяют автоматически с помощью системы измерения координат или вводят их в БУ вручную с места командира, с которого затем контролируют поступающие с автоматических датчиков системы управления огнем метеоданные, координаты цели и вводят их в БУ, исходное положение продольной оси БМ определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в БУ координат ориентира или относительно направления север-юг по горизонту с помощью датчика азимута, и вводят в БУ, определяют потребный угол разворота линии визирования на цель по горизонту и на угол места цели из-за разности высот расположения машины и цели, определяют с помощью БВ рассогласование положения линии визирования прицела наводчика (ПН) относительно плоскости горизонта, предварительно определив положение ее с помощью датчика крена, передают по каналу связи потребную величину рассогласования по вертикали из БВ в БУ, затем из БУ выдают ее в автоматическую оптико-телетепловизионную систему (АСОТТ), с помощью которой вырабатывают сигнал управления зеркалом в канале вертикального наведения, тем самым приводя к движению зеркала прицела наводчика по вертикали в сторону уменьшения рассогласования и обеспечивая слежение линии визирования ПН за линией горизонта, принимают по каналу информационного обмена от датчика поворота башни значение угла разворота башни относительно оси машины, рассчитывают величину рассогласования между положением башни по горизонту и направлением на цель, которую выдают в АСОТТ, с помощью которой вырабатывают сигнал управления зеркалом в канале горизонтального наведения, приводя таким образом к движению зеркала ПН по горизонту в сторону уменьшения рассогласования и отрабатывают с погрешностью не более заданной рассогласование орудия относительно линии визирования по вертикальному и горизонтальному каналам, рассчитывают в БУ дальность до цели, передают в БВ код рассчитанной дальности до цели, где определяют углы прицеливания и упреждения по вертикальному и горизонтальному наведению с учетом поправок на условия стрельбы, отрабатывают поправки стабилизатором вооружения, формируют с помощью БВ команду разрешения выстрела и передают ее по каналу информационного обмена в пульт оператора (ПО), где подготавливают цепи электроспуска.
В частном случае система измерения координат выполнена в виде антенного блока, приемника и преобразователя угол-код, которая принимает сигналы космических навигационных спутников, вычисляет в приемнике текущие координаты боевой машины, определяет текущую высоту над уровнем моря, передает текущие координаты БМ по каналу информационного обмена в БУ для отображения на видеосмотровом устройстве командира и вычисления углов наведения орудия.
В частном случае производят преобразование сигнала датчика поворота башни в цифровой код с помощью преобразователя угол-код.
Поставленная задача решается тем, что известная автоматизированная система управления огнем боевой машины, включающая последовательно соединенные баллистический вычислитель (БВ) с системой датчиков входной информации, стабилизатор вооружения, блок управления (БУ), оптико-телевизионный прицел наводчика (ПН), а также телетепловизионный автомат сопровождения целей (АСОТТ), пульт командира (ПК) и пульт оператора (ПО), причем первые входы и первые выходы ПН, АСОТТ, БУ, стабилизатора, БВ, ПК и ПО соединены с цифровым каналом связи, четвертый вход и четвертый выход БУ соединены соответственно со вторым выходом и вторым входом АСОТТ, второй выход ПН соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен с третьим выходом ПО, согласно изобретению дополнительно включает систему измерения координат (СИК), соединенную с пятым входом БУ, а также место командира, включающее последовательно соединенные пульт управления (ПУ) и видеосмотровое устройство командира (ВСУ-К), причем третий выход БУ соединен с первым входом ВСУ-К, выход которого соединен с ПУ, второй выход которого соединен с третьим входом БУ.
Дополнительно в состав датчиковой аппаратуры дополнительно может быть включен датчик азимута, например магнитный.
Бронетанковая техника долгое время отличалась неудовлетворительными качествами СУО. Это отрицательно сказывалось на живучести боевых машин. Потери бронетехники в локальных конфликтах подтверждают это. Для легкобронированной техники, вооруженной малокалиберными автоматическими пушками с дальностью эффективной стрельбы 1500-2000 м, не было необходимости в ее оснащении развитой автоматизированной СУО. Боевые машины, например БМП-2, не имели вообще как такового баллистического вычислителя.
В то же время танки, вооруженные пушками калибра 100-125 мм, вели стрельбу на дальностях до 2,5-3,0 км с места и с ходу. Этому способствовало оснащение их стабилизаторами вооружения, лазерными дальномерами, баллистическими вычислителями с датчиками условий стрельбы.
В области СУО для легкобронированной техники качественный скачок связан с принятием на вооружение БМП-3, оснащенной 100-миллиметровым орудием, 30-миллиметровой пушкой и управляемым вооружением с ракетой, выстреливаемой из ствола орудия. С целью повышения точности стрельбы боевые машины были оснащены СУО с параметрами не хуже танковых СУО /3/. При этом такие вводимые в балвычислитель параметры, как скорость машины и курсовой угол, угловая скорость цели в горизонтальном канале, крен машины поступали с датчиков автоматически. Для медленно меняющихся параметров: температура воздуха и заряда, атмосферное давление, отклонение начальной скорости - предусматривался ручной ввод. Таким образом, происходит сближение линий развития СУО танков и легкобронированной техники, в частности БМП.
Расширение номенклатуры (состава) вооружения БМ (100-миллиметровое орудие, 30-миллиметровая автоматическая пушка (АП), 7,62-миллиметровый пулемет), типов боеприпасов (в орудии - два выстрела: 3УОФ32, 3УОФ70, в АП - осколочно-фугасный (осколочно-трассирующий), бронебойный, бронебойно-подкалиберный 30-миллиметровые снаряды) позволяет в настоящее время существенно расширить функции комплекса вооружения БМ и условия его боевого применения. В технических предложениях и затем в технических заданиях появляются новые боевые задачи, в частности стрельба с закрытых позиций.
Это приводит к необходимости создания, как и на перспективных танках, развитой автоматизированной системы управления огнем.
Анализ тенденций развития систем управления огнем (СУО) отечественных и зарубежных средств бронетанковой техники (БТТ) показывает, что идет постоянное совершенствование датчиковой аппаратуры. В таблице 1 для примера представлены учитываемые параметры на примере отечественных БМП разных поколений.
Однако развитие СУО современных БМ характеризуется не только увеличением числа учитываемых параметров (и, соответственно, числа датчиков), но и совершенствованием измерительной аппаратуры и способов учета параметров, повышением их точности. В упрощенных неавтоматизированных СУО штатных БМ, например БМП-1, БМП-2, доля ошибок подготовки исходных данных могла достигать 95-99%, прежде всего, за счет неточного определения дальности. Усовершенствование структуры СУО БМ, повышение точности получения первичной информации, в частности введение частотного лазерного дальномера, позволило не только повысить точность стрельбы, но и привело к перераспределению вклада отдельных групп ошибок, а следовательно, к ужесточению требований и необходимости совершенствования новой группы датчиков и способов определения параметров, например угловой скорости линии визирования, скорости сближения с целью.
Переход с аналоговых вычислителей на цифровые процессоры в информационно-вычислительных системах (ИУС) БМ позволяет производить обработку нарастающих потоков информации с большей скоростью и точностью, внедрять в ИУС полные неусеченные алгоритмы стрельбы.
Потребовавшаяся в связи с этим разработка программно-информационного обеспечения разрабатываемых вычислительных систем определила необходимость теоретического обоснования процесса ведения и организации стрельбы с учетом предполагаемого расширения боевых задач и функций БМ, совершенствования характеристик ее подсистем, расширения условий боевого применения БМ.
Существенный вклад в повышение точности стрельбы вносит учет угла места цели, нелинейной зависимости поправок в дальность от метеобаллистических факторов, в частности от давления и температуры воздуха, баллистического ветра, их нелинейности и взаимозависимости. Предложены способы учета этих факторов.
Вообще говоря, номенклатура вновь введенных датчиков и способов определения параметров и совершенствование имеющихся полностью отображает развитие стрельбового алгоритма в части учета новых факторов и более точного учета расширенных в соответствии с техническим заданием условий стрельбы. Важной предпосылкой для ведения стрельбы с закрытых позиций является развитие спутниковых навигационных систем /6-8/.
Сказанное позволяет расширить функциональные возможности средств БТТ, в частности обеспечить стрельбу с закрытых позиций по ненаблюдаемым целям.
Предлагаемая группа изобретений поясняется графическими материалами.
На фиг.1 представлены ошибки учета метеобаллистической подготовки для 100-миллиметрового снаряда с v0=355 м/с при двух уровнях точности первичной информации, соответствующей неавтоматизированной и автоматизированной СУО.
На фиг.2 представлена функциональная схема СУО комплекса вооружения БМ:
⇔ - цифровой канал связи RS-485; → - аналоговые каналы связи; α - поправка к углу прицеливания; β - поправка к углу упреждения вооружения; 1 - баллистический вычислитель (БВ); 2 - стабилизатор вооружения; 3 - блок управления (БУ); 4 - автомат сопровождения объектов телетепловизионный (АСОТТ); 5 - прицел наводчика (ПН); 6 - пульт командира (ПК); 7 - пульт оператора (ПО); 8 - датчики СУО; 9 - пульт управления командира (ПУ); 10 - видеосмотровое устройство командира (ВСУ-К); 11 - система измерения координат (СИК); 12 - блок управления стабилизатора (БУС); 13 - пульт управления наводчика (ПУН); 14 - пульт управления командира (ПУК); 15 - усилитель вертикального наведения (УВН); 16 - усилитель горизонтального наведения (УГН); 17 - двигатель вертикального наведения (ДВН); 18 - двигатель горизонтального наведения (ДВН); 19 - датчик положения пушки (ДПП).
На фиг.3 представлены элементы, входящие в систему измерения координат: фиг.3а - приемник, фиг.3б - преобразователь угол-код, фиг.3в - блок антенный в сборе.
Анализ тенденций развития СУО комплексов вооружения отечественных средств бронетанковой техники от БМП-2 (отсутствие бортового вычислителя, датчиков условий стрельбы) через БМП-3 (аналоговый вычислитель 1В539М в виде функционального преобразователя с автоматическим и ручным вводом условий стрельбы, низкочастотный лазерный дальномер, установленный на стволе) и далее к БМД-4 (цифровой баллистический вычислитель, ввод новых, часто цифровых датчиков с улучшенными точностными характеристиками, высокочастотный дальномер, введенный в состав прицелов командира и наводчика) отражает общие тенденции развития ИУС: балвычислитель ⇒ вычислительная система ⇒ информационно-управляющая система. В БМД-4 ИУС (вычислительная система с так называемой распределенной памятью, включающая помимо бортового процессора 1В539М несколько дополнительных контроллеров) выполняет задачи не только сбора и обработки информации, но и перераспределяет ее потоки (режим "ВЦУ", единый цифровой канал), координирует работу всего комплекса вооружения, см. таблицу 2, производит не только опрос датчиковой аппаратуры, но и выдает команды в подсистемы системы управления огнем (СУО) и вооружения (см. функциональную схему фиг.2).
Виды передаваемой и принимаемой информации для различных устройств СУО приведены в таблице 2 /4 /.
Одним из основных требований к артиллерийскому вооружению боевых машин является обеспечение поражения целей в глубине боевых порядков подразделений противника и подходящих резервов. Вооружение принятой на вооружение боевой машины десанта БМД-4, модернизированной БМП-3 обеспечивает решение задач поражения целей на всю глубину боевого порядка мотопехотного батальона стрельбой прямой наводкой и с закрытых огневых позиций по ненаблюдаемым целям на дальностях до 7 км, а в перспективе - до 9 км. Для этих целей и организован режим внешнего целеуказания ("ВЦУ").
Анализ известных комплексов вооружения боевых машин не позволяет выявить в них совокупность признаков, отличающих заявляемое решение от прототипа.
Для подтверждения технической реализуемости далее представлен пример функционирования заявляемой системы - комплекса вооружения боевой машины.
Основным режимом работы БМД-4 при стрельбе неуправляемым вооружением является режим "Автомат": подрежимы "Авт-Н" (с места наводчика) и "Авт-К" (с места командира). При этом режиме, например с места наводчика, осуществляется днем и ночью поиск, обнаружение, опознавание целей, сопровождение с измерением дальности до цели.
Сопровождение цели осуществляется путем наведения зеркала прицела наводчика (ПН) (5) (прицела командира) по вертикали и по горизонту рукоятками ПУНа (13) (ПУКа (14)) в ручном режиме или же по командам, вырабатываемым АСОТТ (4) в режиме автоматического сопровождения цели.
Сигнал с датчиков положения зеркала ПН (5) (или прицела командира) по вертикали, в соответствии с блок-схемой, поступает в стабилизатор вооружения (2), где сравнивается с сигналом датчика положения пушки (ДПП) (19), который механически связан с осью вращения блока оружия. Сигнал ошибки усиливается и подается в привод вертикального наведения, что приводит к повороту оружия в сторону уменьшения рассогласования. При отклонении от стабилизированного положения зеркала ПН (5) (прицела командира) по горизонту возникает сигнал ошибки, который снимается с датчика положения зеркала ПН (прицела командира) по горизонту, усиливается и подается в привод горизонтального наведения, что приводит к повороту башни в сторону уменьшения рассогласования.
В соответствии с обнаруженной целью на пульте командира (ПК) (6) устанавливается нужный тип боеприпаса. Например, в БМД-4 это осуществляется путем нажатия кнопки "БП" на ПУН (13) или кнопки "Выбор БП" на ПК (6) (до появления соответствующей индикации на индикаторах пульта оператора (ПО) (7), ПК (6), в поле зрения прицела наводчика или на экранах видеосмотрового устройства наводчика (ВСУ-Н) или видеосмотрового устройства командира (ВСУ-К) (10), соответствующей индикации устанавливаемого типа боеприпаса. Логический сигнал "+27в", например, от кнопки "БП" поступает на вход ПО (7). Перебор типов боеприпасов производится по кольцу из числа загруженных.
Работа СУО в режиме "ВЦУ" осуществляется в следующем порядке /4/.
Комплекс вооружения включается в режим "АВТ-Н". При нажатии кнопки "ВЦУ" на пульте управления (ПУ) (9) прицела командира напряжение "+27 В" с кнопки "ВЦУ" поступает на вход БУ (3). После удерживания кнопки в течение 3 с БУ (3) по каналу RS-485 передает в БВ (1) команду "ВЦУ".
При поступлении команды "ВЦУ" БВ (1) передает в БУ (3) команду передачи функции управления каналом и после получения команды подтверждения передачи переходит в подчиненный режим. На ВСУ-К (10) выводится рабочее меню режима "ВЦУ".
При стрельбе с закрытых огневых позиций исходными данными для вычислений являются топографические координаты цели и собственные топографические координаты, по которым в БУ (3) производится расчет азимутального направления и дальности до цели. Координаты машины (долгота, широта и высота над уровнем моря) определяются автоматически с помощью спутниковой навигационной системы, но могут быть установлены и вручную. С места командира на ВСУ-К (10) контролируются метеоданные, поступающие от датчиков БО (при необходимости командир может установить их значения вручную), производится ввод координат ориентира и координат цели.
После ввода координат цели и ориентира, определения собственных координат БУ (3) производит расчет исходного азимута машины и угла разворота орудия на цель по горизонту и поправки к углу прицеливания на разность высот расположения машины и цели.
В режиме "ВЦУ" БВ (1) производит расчет рассогласования положения линии визирования ПН (5) относительно плоскости горизонта, положение которой определяется по сигналу с датчика крена, с учетом рассчитанной поправки на угол места цели.
По каналу RS-485 БУ (3) принимает от БВ (1) величину рассогласования по вертикали и выдает ее в АСОТТ (4), который вырабатывает сигнал управления зеркалом в канале ВН, что приводит к движению зеркала ПН (5) по вертикали в сторону уменьшения рассогласования. Таким образом, в режиме "ВЦУ" обеспечивается слежение линии визирования ПН (5) за плоскостью горизонта (сигналом дифферента с датчика крена) по каналу ВН.
По каналу RS-485 БУ (3) принимает от преобразователя угол-код, механически связанного с погоном башни, значение угла разворота башни относительно оси машины и рассчитывает величину рассогласования между положением башни по горизонту и направлением на цель.
Величина рассогласования выдается в АСОТТ (4), который вырабатывает сигнал управления зеркалом в канале ГН, что приводит к движению зеркала ПН (5) по горизонту в сторону уменьшения рассогласования.
Вооружение следит за зеркалом ПН (5), как и при работе в режиме "АВТ-Н".
После отработки рассогласования по ВН и ГН с погрешностью не более 0,5 т.д. код рассчитанной блоком управления дальности до цели передается в БВ (1), где производится расчет и выработка углов прицеливания и упреждения по ВН и ГН, которые отрабатываются стабилизатором вооружения (2).
Блок управления стабилизатора (БУС) (12) осуществляет суммирование, преобразование и усиление сигналов управления приводами вертикального и горизонтального наведения, перед этим предварительно осуществив коммутацию электрических сетей для обеспечения заданного режима работы стабилизатора (2) и СУО.
В усилителе мощности вертикального наведения (УВН) (15) (УМ-400) сигнал управления вентильным двигателем по вертикальному каналу усиливается по мощности, аналогично - по горизонтальному каналу - в усилителе мощности горизонтального наведения (УГН) (16) (УМ-1200).
Вентильные электродвигатели ВД-400, ВД-1200 - соответственно двигатель ВН (17) и двигатель ГН (18) - являются исполнительными двигателями соответственно привода вертикального наведения (подъемный механизм блока стволов) и привода горизонтального наведения (поворотный механизм башни).
Для производства выстрела нажимается и удерживается кнопка "ТКБ" на ПУН. После согласования орудия с линией визирования и окончания отработки поправок БВ (1) формирует команду разрешения выстрела, которая по каналу RS-485 передается в ПО (7). По приходу команды цепи электроспуска срабатывают, и происходит выстрел.
В процессе стрельбы корректировка по дальности и по направлению производится путем изменения данных в соответствующих полях рабочего меню.
Благодаря предложенному техническому решению, направленному на обеспечение стрельбы с закрытых позиций по ненаблюдаемой цели, за счет совершенствования СУО
- осуществляется более рациональное использование всей номенклатуры применяемых боеприпасов и режимов работы при решении боевых задач боевых машин;
- реализуется повышение боевых характеристик боеприпасов комплекса вооружения образцов БТТ легкой весовой категории, в частности, в части увеличения дальности стрельбы 100-миллиметровых снарядов до 7 км (3УОФ19 "Вишня") и более;
- обеспечивается поражение целей на всю глубину боевого порядка мотопехотного батальона.
Это позволяет расширить функции и условия боевого применения перспективных и модернизированных образцов БТТ, придав им свойства орудия.
Заявляемая СУО входит в состав комплекса вооружения унифицированного боевого отделения, который прошел государственные испытания и принят на вооружение Постановлением Правительства Российской Федерации №884 от 31 декабря 2004 года " О принятии на вооружение Вооруженных Сил Российской Федерации боевой машины десанта БМД-4 с унифицированным боевым отделением Б8Я01 для машин легкой весовой категории по массе и выстрелом 3УБК23-3 с управляемой ракетой 9М117М1-3 (шифр "Бахча-У")". В настоящее время осуществляется серийное производство боевого отделения.
Источники информации
1. Шипунов А.Г., Березин С.М., Богданова Л.А. Боевые машины с зенитными свойствами // Военный парад, №4 (июль-август) - 2004.
2. Патент на изобр. №2351876. "Комплекс вооружения боевой машины", приоритетный №2007124061 от 26.06.2007, Бюл.№10 от 10.04.2009 (прототип).
3. Комплекс вооружения 2К23 боевой машины пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Тула, КБП, 1991, стр.1-10.
4. Боевое отделение. Руководство по эксплуатации. Ч.1. Техническое описание Б8Я01.00.00.000 РЭ.
5. B.C.Кузнецов, Г.Ф.Платонов, М.А.Свистунов. Стрельба с закрытых позиций. Под ред. генерал-майора артиллерии С.С.Волкенштейна. Изд. Военной ордена Ленина академии бронетанковых войск им. И.В.Сталина, М., 1958, стр.23 (прототип).
6. "Независимое военное обозрение", 2005, 35, стр.6.
7. Зарубежное военное обозрение, 2003, №9, стр.48-55.
8. Зарубежное военное обозрение, 2003, №10, стр.48-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| Способ согласования оптических осей прицелов и оружия комплекса вооружения боевых машин и система для их осуществления | 2020 |
|
RU2739331C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
| Система управления и наведения вооружения боевой машины | 2019 |
|
RU2723501C1 |
Изобретение относится к военной технике и может найти применение в комплексах вооружения боевых машин типа БМП, танков, БТР, БРДМ и т.п. Технический результат - расширение функциональных возможностей, в частности обеспечение стрельбы с закрытых позиций по ненаблюдаемой цели, за счет совершенствования системы управления огнем (СУО) боевой машины (БМ). Для достижения данного результата используют специализированный блок управления (БУ) и баллистический вычислитель (БВ), при этом координаты БМ определяют автоматически с помощью системы измерения координат или вводят их в БУ вручную с места командира, с которого затем контролируют поступающие с автоматических датчиков системы управления огнем метеоданные, координаты цели и вводят их в БУ. Исходное положение продольной оси БМ определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в БУ координат ориентира или относительно направления север-юг по горизонту с помощью датчика азимута. 2 н. и 4 з.п. ф-лы, 3 ил., 2 табл.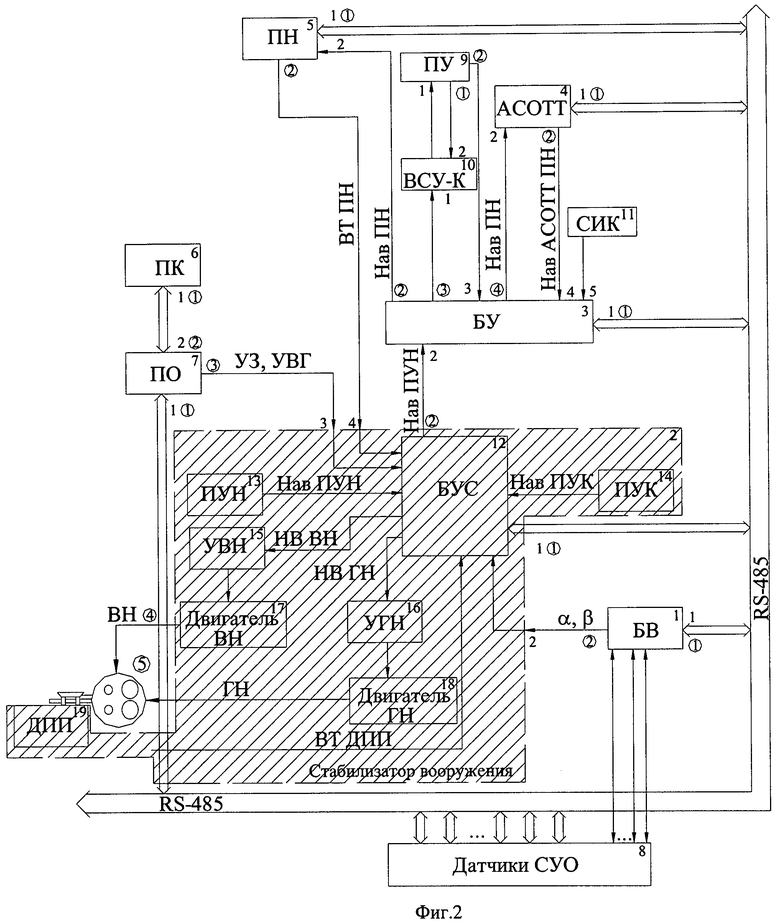
1. Способ стрельбы боевой машины (БМ) с закрытых позиций по ненаблюдаемой цели, включающий обнаружение и распознавание цели, определение топографических координат и высоты огневой позиции БМ с установленным на ней орудием над уровнем моря, выбор основного направления стрельбы, получение топографических координат цели и определение ее высоты над уровнем моря, выбор снаряда, введение поправок на отклонение условий стрельбы от табличных, на деривацию и при необходимости - поправки угла прицеливания на угол места цели, назначение на основе вычисленных данных исходных установок стрельбы и отработку их относительно предварительно выбранного основного направления, стрельбу по цели, отличающийся тем, что вычислительные операции осуществляют с использованием блока управления (БУ) и баллистического вычислителя (БВ), при этом координаты БМ определяют автоматически с помощью системы измерения координат или вводят их в БУ вручную с места командира, с которого затем контролируют поступающие с автоматических датчиков системы управления огнем метеоданные, координаты цели и вводят их в БУ, исходное положение продольной оси БМ определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в БУ координат ориентира, или относительно направления север-юг по горизонту с помощью датчика азимута, и вводят в БУ, определяют потребный угол разворота линии визирования на цель по горизонту и на угол места цели из-за разности высот расположения машины и цели, определяют с помощью БВ рассогласование положения линии визирования прицела наводчика (ПН) относительно плоскости горизонта, предварительно определив положение ее с помощью датчика крена, передают по каналу связи потребную величину рассогласования по вертикали из БВ в БУ, затем из БУ выдают ее в автоматическую оптикотелетепловизионную систему (АСОТТ), с помощью которой вырабатывают сигнал управления зеркалом в канале вертикального наведения, тем самым приводя к движению зеркала прицела наводчика по вертикали в сторону уменьшения рассогласования и обеспечивая слежение линии визирования ПН за линией горизонта, принимают по каналу информационного обмена от датчика поворота башни значение угла разворота башни относительно оси машины, рассчитывают величину рассогласования между положением башни по горизонту и направлением на цель, которую выдают в АСОТТ, с помощью которой вырабатывают сигнал управления зеркалом в канале горизонтального наведения, приводя таким образом к движению зеркала ПН по горизонту в сторону уменьшения рассогласования, и отрабатывают с погрешностью не более заданной рассогласование орудия относительно линии визирования по вертикальному и горизонтальному каналам, рассчитывают в БУ дальность до цели, передают в БВ код рассчитанной дальности до цели, где определяют углы прицеливания и упреждения по вертикальному и горизонтальному наведению с учетом поправок на условия стрельбы, отрабатывают поправки стабилизатором вооружения, формируют с помощью БВ команду разрешения выстрела и передают ее по каналу информационного обмена в пульт оператора (ПО), где подготавливают цепи электроспуска.
2. Способ по п.1, отличающийся тем, что система измерения координат обеспечивает прием сигналов космических навигационных спутников, вычисляет в приемнике текущие координаты боевой машины, определяет текущую высоту над уровнем моря, передает текущие координаты БМ по каналу информационного обмена в БУ для отображения на видеосмотровом устройстве командира и вычисления углов наведения орудия.
3. Способ по п.1, отличающийся тем, что производят преобразование сигнала датчика поворота башни в цифровой код с помощью преобразователя угол-код.
4. Автоматизированная система управления огнем (СУО) боевой машины, включающая последовательно соединенные баллистический вычислитель (БВ) с системой датчиков входной информации, стабилизатор вооружения, блок управления (БУ), оптико-телевизионный прицел наводчика (ПН), а также телетепловизионный автомат сопровождения целей (АСОТТ), пульт командира (ПК) и пульт оператора (ПО), причем первые входы и первые выходы ПН, АСОТТ, БУ, стабилизатора, БВ, ПК и ПО соединены с цифровым каналом связи, четвертый вход и четвертый выход БУ соединены соответственно со вторым выходом и вторым входом АСОТТ, второй выход ПН соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен с третьим выходом ПО, отличающаяся тем, что в нее дополнительно введены система измерения координат (СИК), соединенная с пятым входом БУ, а также место командира, включающее последовательно соединенные пульт управления (ПУ) и видеосмотровое устройство командира (ВСУ-К), причем третий выход БУ соединен с первым входом ВСУ-К, выход которого соединен с ПУ, второй выход которого соединен с третьим входом БУ.
5. Система по п.4, отличающаяся тем, что система датчиков входной информации снабжена датчиком азимута.
6. Система по п.4, отличающаяся тем, что система измерения координат выполнена в виде антенного блока, приемника и преобразователя угол-код.
| КУЗНЕЦОВ В.С., ПЛАТОНОВ Г.Ф., СВИСТУНОВ М.А | |||
| Стрельба с закрытых позиций | |||
| / Под ред | |||
| генерал-майора артиллерии С.С.ВОЛКЕНШТЕЙНА | |||
| Изд | |||
| Военной ордена Ленина академии бронетанковых войск им | |||
| И.В.СТАЛИНА | |||
| - М., 1958, с.23 | |||
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМИ СНАРЯДАМИ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПО НЕСКОЛЬКИМ ЦЕЛЯМ | 2006 |
|
RU2317504C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2247297C1 |
| DE 3338191 А1, 04.02.1988 | |||
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2204783C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ НА ЦЕЛЬ | 1999 |
|
RU2148236C1 |
| US 3902684 A, 02.09.1975. | |||

