Изобретение относится к области вооружения и военной техники, в частности к комплексам вооружения (KB) боевых машин (БМ) типа БМП, танков, БТР, БРДМ и т.п.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ стрельбы БМ по цели, заключающийся в обнаружении и распознавании цели, взятии на сопровождение и сопровождении цели с одновременным дальнометрированием, определении угловых поправок из математических выражений, отклонении с учетом их стволов пушечной установки (ПУ) относительно линии визирования, стрельбе по цели [9] [Патент России №2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. 20.08.2001. Бюл.№23 от 20.08.2001 (прототип)].
Наиболее близким техническим решением, выбранным в качестве прототипа, является информационно-управляющая система (ИУС) боевой машины пехоты БМП-3, которая состоит из баллистического вычислителя и датчиковой аппаратуры, включающей следующие автоматические датчики: датчик дальности, реализованный в виде лазерного дальномера, датчик угловой скорости линии визирования в горизонтальной плоскости, датчик крена оси цапф, а также датчик собственной скорости и курсового угла [3] [Шипунов А.Г., Березин С.М., Богданова Л.А. Боевые машины с зенитными свойствами. // Военный парад, №4 (июль - август). - 2004, (прототип)].
В состав вычислительной системы средств бронетанковой техники типа БМП-3 входят принятые на вооружение в 80-ых годах аналоговые баллистические вычислители (в БМП-3-1В539) с упрощенным стрельбовым алгоритмом [2]. В связи с этим состав датчиков внешних условий стрельбы неполный, ввод данных с них - ручной, с пульта наводчика (давление, температура воздуха и заряда), точностные и динамические характеристики их требуют совершенствования. Кроме того, лазерный дальномер имеет низкую частоту измерения дальности (f=0,5 гц). Это приводит к большим систематическим ошибкам и не позволяет вести эффективную стрельбу по скоростным, в частности воздушным целям [3], см фиг.1.
Задачей предлагаемого комплекса вооружения является повышение эффективности стрельбы путем повышения ее точности и быстродействия за счет совершенствования информационно-вычислительной системы комплекса вооружения боевой машины (БМ), а также расширение функций и условий боевого применения БМ, номенклатуры применяемых боеприпасов и режимов работы, более рациональное использование боекомплекта при решении боевой задачи.
Поставленная задача решается тем, что в известном способе стрельбы БМ по цели, включающем обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели с одновременным дальнометрированием, определение угловых поправок стрельбы из математических выражений, постоянное отклонение с учетом их стволов оружия относительно линии визирования и стрельбу по цели, перед определением угловых поправок выбирают режим работы системы управления огнем (СУО) и тип боеприпаса, в соответствии с которым в пульте управления (ПО) вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, и передают его по запросу баллистического вычислителя (БВ) из ПО в БВ, который передает его в обзорно-прицельную систему и блок управления (БУ), в соответствии с этим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, в зависимости от типа боеприпаса и порядка загруженных боеприпасов формируют сигнал на переключение подачи патронных лент из правого или левого магазинов системы питания оружия, подключают патронную ленту с соответствующим типом боеприпаса.
С помощью информационно-управляющей системы (ИУС), содержащей баллистический вычислитель (БВ), производят последовательный опрос датчиков ИУС, причем при необходимости производят экстраполяцию полученных сигналов до следующего момента поступления соответствующей информации, при этом предварительно перед отработкой силовыми приводами управляющего сигнала осуществляют коммутацию электрических цепей для обеспечения заданного режима работы стабилизатора и СУО.
Поставленная задача решается также тем, что в известном способе стрельбы БМ по цели, включающем обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели с одновременным дальнометрированием, определение угловых поправок стрельбы из математических выражений, отклонение с учетом их стволов оружия относительно линии визирования и стрельбу по цели, перед определением угловых поправок выбирают режим работы СУО и тип боеприпаса, в соответствии с которым в ПО вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, передают его по запросу БВ из ПО в БВ, который передает его в обзорно-прицельную систему и БУ, в соответствии с логическим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, затем с помощью ИУС, содержащей БВ, производят последовательный опрос датчиков ИУС, при необходимости экстраполируют сигналы между замерами, а после вычисления и отработки углов прицеливания и упреждения для выбранного типа боеприпаса отключают стабилизатор от слежения за зеркалом прицела наводчика (ПН), разворачивают ствол оружия на угол заряжания, заряжают боеприпас, возвращают привод вертикального наведения в режим слежения за зеркалом ПН с учетом ранее выработанных углов прицеливания и упреждения, а после выстрела осуществляют экстракцию гильзы, вновь возвращают привод ВН оружия в режим слежения за линией визирования ПН.
Поставленная задача решается также тем, что для перехода в режим стрельбы по воздушным целям увеличивают предельные скорости наведения линии визирования прицела наводчика или прицела командира и оружия.
Поставленная задача решается также тем, что при принятии наводчиком или командиром решения о включении режима автосопровождения цели с помощью оптикотепловизионной автоматической системы анализируют образ цели и выдают сигналы наведения на зеркало прицела наводчика или прицела командира, при этом прицельная марка на цели удерживается автоматически.
Поставленная задача решается тем, что в известной информационно-управляющей системе (ИУС) комплекса вооружения БМ, содержащей баллистический вычислитель, автоматический датчик дальности, выполненный в виде лазерного дальномера, автоматический датчик угловой скорости линии визирования в горизонтальной плоскости, автоматический датчик крена, автоматический датчик собственной скорости и курсового угла, дополнительно ИУС снабжена блоком управления (БУ), пультом оператора (ПО), пультом командира (ПК), датчиком угловой скорости линии визирования по вертикальному каналу, датчиком угла разворота зеркала прицела по вертикальному каналу, датчиком тангажа, а также автоматическими датчиками внешних условий и температуры заряда, причем первые входы и первые выходы БУ, ПО, баллистического вычислителя (БВ), а также автоматические датчики соединены с цифровым каналом связи, второй и третий входы БУ подсоединены соответственно к стабилизатору и обзорно-прицельной системе БМ, выходы БУ подсоединены к входам обзорно-прицельной системы БМ, при этом ПК и ПО взаимно объединены своими входами и выходами, второй выход БВ и третий выход ПО подсоединены к входам стабилизатора, третий вход ПО подсоединен к выходу стабилизатора, при этом БВ реализован в виде перепрограммируемого процессора, лазерный дальномер выполнен высокочастотным и установлен в прицельно-навигационной системе.
Поставленная задача решается также тем, что датчики крена и тангажа конструктивно объединены и выполнены в виде электромеханического устройства с чувствительным элементом в виде гиромотора, одновременно измеряющего углы крена и тангажа плоскости погона башни.
Поставленная задача решается также тем, что в качестве датчиков внешних условий использованы датчики ветра, температуры воздуха и температуры заряда и датчик давления воздуха.
Поставленная задача решается также тем, что датчик ветра выполнен в виде последовательно соединенных электромеханического устройства с чувствительным элементом мембранного типа и контроллера.
Поставленная задача решается также тем, что датчик температуры выполнен в виде последовательно соединенных чувствительного элемента термоэлектронного типа и контроллера.
Сопоставительный анализ заявляемых решений с прототипами показывает, что согласно изобретению дополнительно перед определением угловых поправок выбирают режим работы системы управления огнем (СУО) и тип боеприпаса, в соответствии с которым в пульте управления (ПО) вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, и передают его по запросу баллистического вычислителя (БВ) из ПО в БВ, который передает его в обзорно-прицельную систему и блок управления (БУ), в соответствии с этим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, в зависимости от типа боеприпаса и порядка загруженных боеприпасов формируют сигнал на переключение подачи патронных лент из правого или левого магазинов системы питания оружия, подключают патронную ленту с соответствующим типом боеприпаса, с помощью информационно-управляющей системы (ИУС), содержащей баллистический вычислитель (БВ), производят последовательный опрос датчиков ИУС, причем при необходимости производят экстраполяцию полученных сигналов до следующего момента поступления соответствующей информации, при этом предварительно перед отработкой силовыми приводами управляющего сигнала осуществляют коммутацию электрических цепей для обеспечения заданного режима работы стабилизатора и СУО.
Сопоставительный анализ заявляемых решений с прототипами показывает, что согласно изобретения дополнительно перед определением угловых поправок выбирают режим работы СУО и тип боеприпаса, в соответствии с которым в ПО вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, передают его по запросу БВ из ПО в БВ, который передает его в обзорно-прицельную систему и БУ, в соответствии с логическим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, затем с помощью ИУС, содержащей БВ, производят последовательный опрос датчиков ИУС, при необходимости экстраполируют сигналы между замерами, а после вычисления и отработки углов прицеливания и упреждения для выбранного типа боеприпаса отключают стабилизатор от слежения за зеркалом прицела наводчика (ПН), разворачивают ствол оружия на угол заряжания, заряжают боеприпас, возвращают привод вертикального наведения в режим слежения за зеркалом ПН с учетом ранее выработанных углов прицеливания и упреждения, а после выстрела осуществляют экстракцию гильзы, вновь возвращают привод ВН оружия в режим слежения за линией визирования ПН.
Сопоставительный анализ заявляемых решений с прототипами показывает, что согласно изобретения дополнительно ИУС снабжена блоком управления (БУ), пультом оператора (ПО), пультом командира (ПК), датчиком угловой скорости линии визирования по вертикальному каналу, датчиком угла разворота зеркала прицела по вертикальному каналу, датчиком тангажа, а также автоматическими датчиками внешних условий и температуры заряда, причем первые входы и первые выходы БУ, ПО, баллистического вычислителя (БВ), а также автоматические датчики соединены с цифровым каналом связи, второй и третий входы БУ подсоединены соответственно к стабилизатору и обзорно-прицельной системе БМ, выходы БУ подсоединены к входам обзорно-прицельной системы БМ, при этом ПК и ПО взаимно объединены своими входами и выходами, второй выход БВ и третий выход ПО подсоединены к входам стабилизатора, третий вход ПО подсоединен к выходу стабилизатора, при этом БВ реализован в виде перепрограммируемого процессора, лазерный дальномер выполнен высокочастотным и установлен в прицельно-навигационной системе.
Бронетанковая техника долгое время отличалась неудовлетворительными качествами СУО. Это отрицательно сказывалось на живучести боевых машин. Потери бронетехники в локальных конфликтах подтверждают это. Для легкобронированной техники, вооруженной малокалиберными автоматическими пушками с дальностью эффективной стрельбы 1500-2000 м, не было необходимости в ее оснащении развитой автоматизированной СУО. Боевые машины, например БМП-2, не имели вообще как такового баллистического вычислителя.
В то же время танки, вооруженные пушками калибра 100-125 мм, вели стрельбу на дальностях до 2,5-3,0 км с места и с ходу. Этому способствовало оснащение их стабилизаторами вооружения, лазерными дальномерами, баллистическими вычислителями с датчиками условий стрельбы.
В области СУО для легкобронированной техники качественный скачок связан с принятием на вооружение БМП-3, оснащенной 100 - орудием, 30-мм пушкой и управляемым вооружением с ракетой, выстреливаемой из ствола орудия. С целью повышения точности стрельбы боевые машины были оснащены СУО с параметрами не хуже танковых СУО [3]. При этом такие вводимые в балвычислитель параметры, как скорость машины и курсовой угол, угловая скорость цели в горизонтальном канале, крен машины поступали с датчиков автоматически. Для медленно меняющихся параметров: температура воздуха и заряда, атмосферное давление, отклонение начальной скорости - предусматривался ручной ввод. Таким образом, происходит сближение линий развития СУО танков и легкобронированной техники, в частности БМП.
Расширение номенклатуры (состава) вооружения БМ (100-мм орудие, 30-мм автоматическая пушка (АП), 7,62-мм пулемет), типов боеприпасов (в орудии - два выстрела: 3УОФ32, 3УОФ70, в АП - осколочно-фугасный (осколочно-трассирующий), бронебойный, бронебойно-подкалиберный 30-мм снаряды) позволяет в настоящее время существенно расширить функции комплекса вооружения БМ и условия его боевого применения. В технических предложениях и затем в технических заданиях появляются новые боевые задачи - эффективная стрельба по воздушным целям, стрельба с закрытых позиций.
Это приводит к необходимости создания, как и на перспективных танках, развитой автоматизированной системы управления огнем.
Вообще говоря, в БМП-3, стоящем на вооружении с 1987 года, задача зенитной стрельбы решалась путем ведения стрельбы из 30-мм пушки через ракурсный прицел типа ППБ-2 (наводчиком) или 1П3-10 (командиром). Недостатком такого способа защиты и реализующей ее системы является низкая эффективность стрельбы по скоростным воздушным целям, обусловленная большими погрешностями глазомерного способа определения параметров движения цели, в первую очередь, ракурсной скорости цели Vц. Большие систематические ошибки обусловлены осреднением дальности и угла места цели.
При этом накопленная за пролет вероятность поражения цели не превышает сотых (W≤0,01-0,04) и сводится по существу к вероятности поражения последней очередью, вероятность поражения цели резко убывает с увеличением курсовой дальности, а также параметра и высоты пролета цели.
Для стрельбы по наземным целям в штатной БМП-3 используется двухплоскостной прицел наводчика 1К13-2. Угловые поправки стрельбы соответственно в вертикальном и горизонтальном каналах рассчитываются в баллистическом вычислителе 1В539 от линии визирования, реализуемой с некоторыми погрешностями гиростабилизированным в двух плоскостях прицелом наводчика. При стрельбе по скоростным и тем более воздушным целям через 1К13-2 возникает большая систематическая ошибка, достигающая сотен метров. Она обусловлена прежде всего неучетом в стрельбовом алгоритме скорости сближения с целью. Кроме того, при существующей приборной реализации прицелов, в частности прицела 1К13-2, сопроводительная стрельба в ближней зоне невозможна из-за ограничений по угловой скорости линии визирования и ограничений по углу прокачки линии визирования в вертикальной плоскости.
Для сравнения на фиг.1 построен промах, получаемый при стрельбе 30-мм пушки с использованием прицела 1К13-2 и заложенном в баллистический вычислитель 1 В539 БМП-3 стрельбовом алгоритме по воздушной цели, летящей со скоростью Vц=150 м/с на высоте Н=500 м и параметре р=500 м. На пространственной кривой метками указана курсовая дальность. Как следует из фиг.1, промах составляет сотни метров. Так, на дальности Dк=1500 м проекция промаха на оси системы координат носителя XнYнZн составляет mx=350 м, my=150 м, mz=140 м. Таким образом, имеющаяся в штатных БМ вычислительная система на базе БВ 1В539 с заложенным в него стрельбовым алгоритмом непригодны для стрельбы по воздушным целям.
Анализ тенденций развития СУО отечественных и зарубежных средств бронетанковой техники (БТТ) показывает, что идет постоянное совершенствование датчиковой аппаратуры. В таблице 1 для примера представлены учитываемые параметры на примере отечественных БМП разных поколений.
горизонтальная вертикальная
-
-
+
Однако развитие СУО современных БМ характеризуется не только увеличением числа учитываемых параметров (и, соответственно, числа датчиков), но и совершенствованием измерительной аппаратуры и способов учета параметров, повышением их точности. В упрощенных неавтоматизированных СУО штатных БМ, например, БМП-1, БМП-2, доля ошибок подготовки исходных данных могла достигать 95-99%, прежде всего, за счет неточного определения дальности. Усовершенствование структуры СУО БМ, повышение точности получения первичной информации, в частности, введение частотного лазерного дальномера, позволило не только повысить точность стрельбы, но и привело к перераспределению вклада отдельных групп ошибок, а следовательно, к ужесточению требований и необходимости совершенствования новой группы датчиков и способов определения параметров, например, угловой скорости линии визирования, скорости сближения с целью.
Переход с аналоговых вычислителей на цифровые процессоры в информационно-вычислительных системах (ИУС) БМ позволяет производить обработку нарастающих потоков информации с большей скоростью и точностью, внедрять в ИУС полные неусеченные алгоритмы стрельбы.
Потребовавшаяся в связи с этим разработка программно-информационного обеспечения разрабатываемых вычислительных систем определила необходимость теоретического обоснования процесса ведения и организации стрельбы с учетом предполагаемого расширения боевых задач и функций БМ, совершенствования характеристик ее подсистем, расширения условий боевого применения БМ.
В частности, более точно учитывается относительное движение цели и носителя: по сравнению с алгоритмом, используемым в БВ539 (БМП-3), учитывается угловая скорость линии визирования не только в горизонтальной, но и в вертикальной плоскости, введен учет скорости сближения цели с носителем. В связи с важностью стрельбы по скоростным воздушным целям и многообразием условий боевого применения введен адаптивный алгоритм определения скорости сближения, позволяющий в зависимости от параметров пролета цели и дальности до нее, частоты дальнометрирования и его качества (количества достоверных замеров на выбранном времени наблюдения) использовать наиболее приемлемый для текущих условий способ ее определения [7].
Существенный вклад в повышение точности стрельбы вносит также учет угла места цели, нелинейной зависимости поправок в дальность от метеобаллистических факторов, в частности от давления и температуры воздуха, баллистического ветра. Предложены способы учета этих факторов [10-14].
Вообще говоря, номенклатура и точностные характеристики вновь введенных датчиков и совершенствование имеющихся полностью отображает развитие стрельбового алгоритма в части учета новых факторов и более точного учета расширенных в соответствии с ТЗ условий стрельбы.
Разработан алгоритм схемы разрешения стрельбы, позволяющий отобразить предельные характеристики (ограничения) ее подсистем (максимальная дальность стрельбы, предельные угловые скорости и углы прокачки линии визирования и т.д.) [8]. Централизованный учет предельных характеристик путем введения их в алгоритм разрешения позволяет предотвращать ударные, вибрационные режимы работы систем наведения и сопровождения цели, если отсутствуют локальные схемы блокировки или, по крайней мере, повысить надежность их функционирования, предотвратить нерациональное расходование боекомплекта, связанное как с преждевременным открытием огня, так и со стрельбой при выходе из зоны поражения.
Предложенный алгоритм построения зон возможной стрельбы в трехмерном пространстве позволяет осуществить их визуализацию в реальном масштабе времени на мониторах пультов управления наводчика (командира). В дальнейшем предполагается производить индикацию зон с разметкой ее вероятностью поражения цели, выдачей информации о располагаемом времени стрельбы. Это позволяет повысить степень автоматизации системы, ее эргономичность и надежность, а, в конечном счете, эффективность БМ.
Сказанное позволяет расширить функциональные возможности средств БТТ, в частности, придать им зенитные свойства. Причем, в зависимости от располагаемых материальных и временных ресурсов проработаны различные варианты.
Благодаря проведенному усовершенствованию ИУС БМ типа БМД-4 существенно повысилась точность стрельбы. На фиг.2-4 представлены случайные и систематические ошибки, приведенные к выходу вычислительной системы: ошибки прицельно-навигационной системы (фиг.2), ошибки метеобаллистической подготовки (фиг.3), систематические ошибки (фиг.4) при стрельбе 30-мм пушки БМД-4 с новой ИУС. На фиг.5 в качестве примера представлены диаграммы, иллюстрирующие эффективность стрельбы по воздушной цели с усовершенствованной СУО, и, прежде всего в части введения новой ИУС. Для сравнения приведены прежние уровни, обеспечиваемые при стрельбе по воздушным целям БМП-3.
Предполагалось, что стрельба производится по всей зоне стрельбы (поражения) односекундными очередями с двухсекундными перерывами между ними. Средненеобходимое число попаданий ω=3,5-6,6 в зависимости от угла обстрела, скорость цели Vц=200 м/с. Варьировались пролеты цели на различных параметрах p и пролетах H: 1) p=200 м, H=200 м, 2) p=500 м, H=500 м, 3) p=1000 м, H=1000 м.
Как следует из диаграммы, накопленная за пролет вероятность поражения цели типа самолет F-16 пушечным модулем на базе 2А72 составляет в зависимости от условий пролета цели (p, H) WΣ=0,30-0,84, на базе 2А42 - WΣ=0,45-0,94.
Согласно результатам оценки эффективности перспективных БМ предполагается достигать при стрельбе по воздушным целям типа истребитель А-16, штурмовик А-10 и вертолет АН-64 уровней эффективности, близких к эффективности специализированных зенитных комплексов при существенно меньшем расходе боекомплекта. При этом стрельба может вестись как с места, так и с ходу, в дневное и ночное время.
Баллистический вычислитель 1 В539М реализован в виде перепрограммируемого процессора, на входы которого информация с датчиков поступает в аналоговом и (или) дискретном виде через цифровой канал связи, по которому БВ взаимосвязан также и с другими подсистемами комплекса вооружения БМ, в частности, со вновь введенными в состав ИУС БМ блоком управления (БУ), пультом оператора (ПО), пультом командира (ПК).
На фиг.6 представлен внешний вид пультов командира (ПК) и оператора (ПО).
Пульт командира (ПК) совместно с пультом оператора (ПО) предназначены для обеспечения автоматизации процессов загрузки 100-мм выстрелов, заряжания и разряжания ОПУ и АП, выбора с места командира и индикации выбранного типа боеприпаса, индикации остатка 30-мм и 100-мм боеприпасов.
ПК и ПО представляют собой электронные блоки на базе микропроцессорных схем, связанные между собой и другими блоками при помощи кабельной сети.
На фиг.6 представлен внешний вид блока управления.
Блок управления представляет собой электронный блок на базе микропроцессоров, предназначенный для [4]:
- коммутации видеосигналов прицелов наводчика и командира с целью обеспечения режима автосопровождения с рабочих мест наводчика и командира;
- осуществления информационного обмена между составными частями СУО;
- формирования служебной информации на ВСУ наводчика и командира (на фоне наблюдаемого изображения местности);
- коммутации сигналов управления и формирования команд при стрельбе по ненаблюдаемым целям (режим "ВЦУ").
На фиг.6 представлен внешний вид баллистического вычислителя. Согласно [5] баллистический вычислитель 1 В539М предназначен для сбора информации от датчиков, обработки ее и вычисления углов прицеливания и деривации, кинематических и других угловых поправок (углов упреждения) при стрельбе из автоматической пушки и орудия - пусковой установки, а также настройки и контроля СУО при эксплуатации. При стрельбе УР также решает задачи выработки постоянных углов прицеливания (при стрельбе с превышением и без него) и упреждения или обеспечения встреливания УР в поле управления.
В отличие от баллистического вычислителя 1 В539, входящего в состав СУО БМП-3, 1 В539М имеет большой схемотехнический потенциал и благодаря этому реализует полный стрельбовый алгоритм, позволивший учесть все необходимые факторы стрельбы. Обоснование структуры стрельбового алгоритма и зависимостей приведены в отчетах предприятия, статьях и патентах.
В результате разработан универсальный стрельбовый алгоритм для широкого спектра перспективных средств бронетанковой техники (БМП, БМД, танки и т.п.), который, обладая простотой реализации, преемственностью развития, позволяет обеспечить потребную точность расчетов исходя из обеспечиваемой в настоящее время точности входной информации. Причем универсальность понимается в широком смысле: носителей вооружения (БМ), типов целей и типов боеприпасов. Преемственность развития заключается как в возможности наращивания при необходимости учитываемых поправок, так и в использовании информации с уже имеющейся в БМ и вновь вводимой датчиковой аппаратуры. Новые технические решения, использующиеся в алгоритме, используемом в баллистическом вычислителе 1 В539М, подтверждены патентами [6-15].
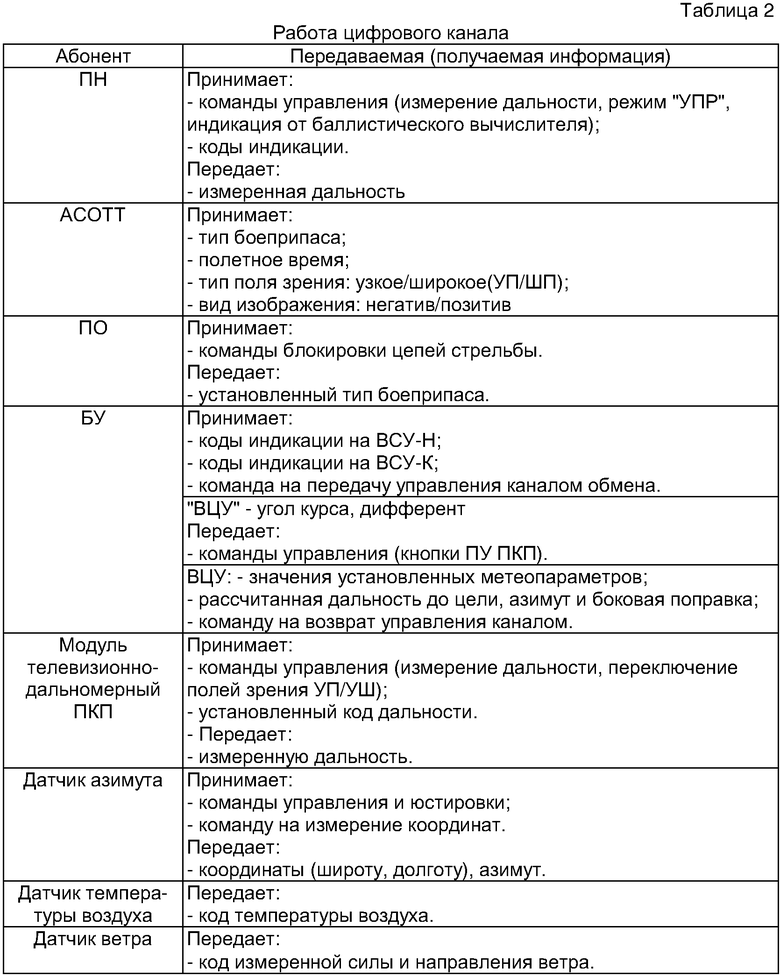
Анализ тенденций развития ИУС комплексов вооружения отечественных средств бронетанковой техники от БМП-2 (отсутствие бортового вычислителя, датчиков условий стрельбы) через БМП-3 (аналоговый вычислитель 1 В539М в виде функционального преобразователя с автоматическим и ручным вводом условий стрельбы, низкочастотный лазерный дальномер, установленный на стволе) и далее к БМД-4 (цифровой баллистический вычислитель, ввод новых, в основном цифровых датчиков с улучшенными точностными характеристиками, высокочастотные дальномеры, введенные в состав прицелов командира и наводчика) отражает общие тенденции развития ИУС: балвычислитель ⇒ вычислительная система ⇒ информационно-управляющая система. В БМД-4 ИУС (вычислительная система с так называемой распределенной памятью, включающая помимо бортового процессора 1 В539М несколько дополнительных контроллеров) выполняет задачи не только сбора и обработки информации, но и перераспределяет ее потоки (режим "ВЦУ", единый цифровой канал), координирует работу всего комплекса вооружения (см. таблицу 2), производит не только опрос датчиковой аппаратуры, но и выдает команды в подсистемы СУО и вооружения.
Виды передаваемой и принимаемой информации для различных устройств СУО приведены в таблице 2 [4].
Одним из основных требований к артиллерийскому вооружению боевых машин является обеспечение поражения целей в глубине боевых порядков подразделений противника и подходящих резервов. Вооружение БМД-4 обеспечивает решение задач поражения целей на всю глубину боевого порядка мотопехотного батальона стрельбой прямой наводкой и с закрытых огневых позиций на дальностях до 7 км. Для этих целей и организован режим внешнего целеуказания ("ВЦУ").
Анализ известных комплексов вооружения боевых машин не позволяет выявить в них совокупность признаков, отличающих заявляемые решения от прототипов.
На фиг.1 представлен промах, получаемый при стрельбе по воздушной цели 30-мм пушки с использованием прицела 1К13-2.
На фиг.2 представлены случайные ошибки прицельно-навигационной системы от упрежденной дальности Dy(f=5 Гц), Vц=200 м/с,  ,
,  ,
,
σD=5 м,  ,
,  .
.
На фиг.3 представлены ошибки учета метеобаллистической подготовки при точности первичной информации:
 ,
,  , σн=6,2%H, σT=3°, Vц=200 м/с.
, σн=6,2%H, σT=3°, Vц=200 м/с.
На фиг.4 представлены систематические ошибки стрельбы (проекции промаха на картинную плоскость my, mZ); f=5 Гц, Vц=200 м/с.
На фиг.5 приведены диаграммы, иллюстрирующие повышение эффективности стрельбы при стрельбе по воздушной цели при использовании предлагаемого способа и реализующей его ИУС.
На фиг.6 представлен внешний вид устройств, входящих в состав ИУС: баллистического вычислителя (БВ), блока управления (БУ), пульта оператора (ПО), пульта командира (ПК), датчика крена и датчика ветра.
На фиг.7 представлена функциональная схема заявляемой ИУС:
БУ - блок управления, БВ - баллистический вычислитель, ПО - пульт оператора-наводчика, ПК - пульт командира.
Для подтверждения технической реализуемости далее представлен пример функционирования заявляемой подсистемы, входящей в состав комплекса вооружения боевой машины.
Основным режимом работы БМД-4 при стрельбе неуправляемым вооружением является режим "Автомат": подрежимы "Авт-Н" (с места наводчика) и "Авт-К" (с места командира). При этом режиме, например, с места наводчика, осуществляется днем и ночью поиск, обнаружение, опознавание целей, сопровождение с измерением дальности до цели.
Сопровождение цели осуществляется путем наведения зеркала прицела наводчика (прицела командира) по вертикали и по горизонту рукоятками ПУНа (ПУКа) в ручном режиме или же по командам, вырабатываемым АСОТТ в режиме автоматического сопровождения цели.
Сигнал с датчиков положения зеркала прицела наводчика (или прицела командира) по вертикали, в соответствии с блок-схемой, поступает в стабилизатор вооружения, где сравнивается с сигналом датчика положения пушки, который механически связан с осью вращения блока оружия. Сигнал ошибки усиливается и подается в привод вертикального наведения, что приводит к повороту оружия в сторону уменьшения рассогласования. При отклонении от стабилизированного положения зеркала прицела наводчика (прицела командира) по горизонту возникает сигнал ошибки, который снимается с датчика положения зеркала прицела наводчика (прицела командира) по горизонту, усиливается и подается в привод горизонтального наведения, что приводит к повороту башни в сторону уменьшения рассогласования.
В соответствии с обнаруженной целью на пульте командира (ПК) устанавливается нужный тип боеприпаса. Например, в БМД-4 это осуществляется путем нажатия кнопки "БП" на пульте управления наводчика (ПУН) или кнопки "Выбор БП" на пульте командира (ПК) (до появления соответствующей индикации на индикаторах ПО, ПК, в поле зрения прицела наводчика или на экранах видеосмотрового устройства наводчика (ВСУ-Н) или видеосмотрового устройства командира (ВСУ-К) соответствующей индикации устанавливаемого типа боеприпаса. Логический сигнал "+27в", например, от кнопки "БП" поступает на вход пульта оператора (ПО). Перебор типов боеприпасов производится по кольцу из числа загруженных.
Например, при необходимости стрельбы автоматической 30-мм пушкой при установке типов "О30"(осколочно-фугасный снаряд), "Б30"(бронебойно-трассирующий), "П30"(подкалиберный) через 1 с из ПО в блок автоматики выдается команда на включение соответствующей подачи (нижней для "ОЗ0", верхней для "БЗ0" и "ПЗ0") системы питания АП.
Код установленного типа боеприпаса передается по цифровому каналу обмена RS-485 по запросу баллистического вычислителя (БВ) из ПО в БВ, который, в свою очередь, передает ее в прицел наводчика, БУ и АСОТТ.
Индикация установленного типа боеприпаса производится на индикаторах ПО, ПК, в поле зрения прицела наводчика и на экранах видеосмотровых устройств наводчика и командира: ВСУ-Н, ВСУ-К.
Далее измеряется дальность наводчиком или командиром. Для этого рукоятками соответственно пульта управления наводчика (ПУН) или командира (ПУК) вершина прицельной марки прицела наводчика (командира) наводится на цель и нажимается кнопка "Д" на левой ручке ПУН (ПУК).
При этом сигнал с кнопки "Д" ПУН (ПУК) поступает в БУ, где устанавливается признак того, кто измеряет дальность, есть ли измерение вообще, и передает его в БВ.
При измерении дальности наводчиком БВ выдает по каналу RS -485 в прицел наводчика команды на измерение дальности.
При нормальной работе канала RS-485 дальномер прицела наводчика производит цикл измерения дальности и выводит ее на индикацию. Через 0,7 с БВ посылает команду на запрос измеренной дальности и принимает код дальности от прицела наводчика.
После отпускания кнопки "Д" на ПУН БВ посылает в прицел наводчика команду на включение индикации дальности, передаваемой от себя, а также коды дальности и типа боеприпаса.
Аналогично осуществляется дальнометрирование с ПУКа.
Виды передаваемой и принимаемой информации для различных устройств СУО приведены в таблице 2 [4].
При работе вооружения БВ производит последовательный опрос датчиков, входящих в состав ИУС, и вырабатывает текущие поправки к углам прицеливания и упреждения, которые затем автоматически отрабатываются стабилизатором вооружения в соответствии с выбранным типом боеприпаса, измеренной дальностью до цели, скоростью и направлением движения машины, собственной скоростью машины, курсовым углом на цель, собственным креном и дифферентом машины, данными, постоянно поступающими с датчиков внешних условий: поперечной составляющей скорости ветра, температуры воздуха, температуры выстрела.
Стабилизатор в рассматриваемых режимах "Авт-Н" (с места наводчика) и "Авт-К" (с места командира) осуществляет наведение линии прицеливания прицела наводчика (прицела командира) по управляющему воздействию от пульта управления наводчика (командира), слежение оружия за линией прицеливания (по датчикам прицела) с учетом поправок, выдаваемых БВ.
Для этих целей блок управления стабилизатора осуществляет суммирование, преобразование и усиление сигналов управления приводами вертикального и горизонтального наведения, перед этим предварительно осуществив коммутацию электрических сетей для обеспечения заданного режима работы стабилизатора и всей СУО.
В усилителе мощности УМ-400 сигнал управления вентильным двигателем по вертикальному каналу усиливается по мощности, аналогично - по горизонтальному каналу - УМ-1200.
Вентильные электродвигатели ВД-400, ВД-1200 являются исполнительными двигателями соответственно привода вертикального наведения (подъемный механизм) и привода горизонтального наведения (поворотный механизм).
Работа комплекса при стрельбе орудия-пусковой установки (ОПУ) 100-мм ОФС снарядами происходит следующим образом.
Кнопкой "БП" на ПУН ("Выбор БП" на ПК) устанавливается тип боеприпаса "017" или "019", при этом подключаются электрические цепи механизма заряжания и электроспуска ОПУ.
При нажатии кнопки "МЗ" на правой ручке ПУН начинается автоматический цикл заряжания ОПУ.
Стабилизатор на время заряжания отключается от слежения за зеркалом ПН, с блока управления стабилизатора (БУС) через усилитель мощности на электродвигатель подъемного механизма поступает сигнал, определяющий величину угла заряжания. Подъемный механизм разворачивает блок оружия на угол заряжания, при этом снимается напряжение с электромагнита редуктора привода ВН, который переключает привод ВН с моторной ветви на ручную. Таким образом производится стопорение блока оружия на угле заряжания (примерно 39°) за счет самоторможения редуктора привода ВН на ручной ветви. Одновременно с установкой на угол заряжания орудия производится наклон штанги механизма заряжания с выстрелом выбранного типа.
После постановки ОПУ на угол заряжания автоматически включается привод механизма досылания и происходит заряжание выстрела. При своем движении выстрел воздействует на экстракторы, клин ОПУ закрывается.
По сигналу закрытия клина каретка механизма досылания и штанга возвращаются в исходное положение, одновременно подается напряжение на электромагнит редуктора и электродвигатель привода ВН. Привод ВН переключается в режим слежения за зеркалом ПН и приводит блок оружия в согласованное положение с линией визирования (с учетом углов упреждения и прицеливания).
При необходимости наводчик (командир) включают режим автосопровождения цели, при этом АСОТТ начинает анализировать образ цели и выдавать сигналы наведения на зеркало ПН (ПКП), удержание прицельной марки на цели производится автоматически.
Для производства выстрела наводчик (командир) нажимает кнопку "ТКБ" на правой рукоятке ПУН (ПУК). При нажатой кнопке и при наличии сигнала разрешения выстрела в стабилизаторе напряжение поступает на электромагнит ударно-спускового механизма орудия - происходит выстрел.
После выстрела откатные части орудия ставятся на шептало. В ПО и блоке автоматики формируется сигнал приведения орудия на угол выброса гильзы. Привод ВН приводит блок орудия на угол выброса (при этом открывается люк выброса) и переключается на ручную ветвь. Блок автоматики подает напряжение на электромагнит шептала орудия.
Откатные части орудия начинают двигаться вперед, открывается клин орудия и гильза экстрактируется в открытый люк выброса. В переднем положении откатных частей в ПО и блоке автоматики вырабатывается сигнал на включение электромагнита редуктора привода ВН. Привод ВН переходит в режим слежения за линией визирования ПН.
По сравнению с существующими аналогами комплекс вооружения, в состав которого входит заявляемая ИУС, обеспечивает существенное повышение эффективности стрельбы в зависимости от условий боевого применения, а при стрельбе, в частности по воздушной цели, в десятки раз, (см. фиг.5). Это достигнуто, прежде всего, за счет усовершенствования ИУС БМ.
Использование в качестве ядра ИУС цифрового бортового вычислителя (в БМД-4-1В539М) позволяет придать системе универсальность. Цифровые способы предпроцессорной обработки сигналов, предложенные, в частности, в патентах [7, 18] позволяют алгоритмическими (неконструкторскими) способами получать информацию, необходимую в стрельбовом алгоритме. Тем самым происходит экономия материальных ресурсов и времени. Например, потребная для стрельбового алгоритма скорость сближения цели с носителем на БМД-4 определяется в блоке определения скорости сближения, реализованном алгоритмическим способом [17]. Для сравнения, аналогичный параметр в авиационных системах измеряется с помощью специальных датчиков - ДИСС (датчик измерения скорости сближения).
Цифровая ИУС позволяет интегрировать боевую машину в системы управления подразделением. Тем самым создаются предпосылки для реализации принципа "командная управляемость".
Введение нового типа 100-мм боеприпаса с увеличенной до 7 км дальностью стрельбы и организация в соответствии с этим стрельбы с закрытых позиций в режиме внешнего целеуказания позволяет решать задачи поражения целей на всю глубину боевого порядка мотопехотного батальона.
Заявляемая ИУС входит в комплекс вооружения унифицированного боевого отделения, который прошел государственные испытания и принят на вооружение Постановлением Правительства Российской Федерации №884 от 31 декабря 2004 года "О принятии на вооружение Вооруженных Сил Российской Федерации боевой машины десанта БМД-4 с унифицированным боевым отделением Б8Я01 для машин легкой весовой категории по массе и выстрелом ЗУБК23-3 с управляемой ракетой 9М117М1-3 (шифр "Бахча-У")". В настоящее время осуществляется серийное производство БМД-4.
Источники информации
1. Шипунов А.Г., Березин С.М., Богданова Л.А. Боевые машины с зенитными свойствами. // Военный парад, №4 (июль-август) - 2004 (прототип).
2. Изделие 1 В539. Техническое описание ПБА 3.031.039 ТО Тула, КБП, 1985, стр.12-16.
3. Комплекс вооружения 2К23 боевой машины пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Тула, КБП, 1991, стр.1-10. 4 Боевое отделение. Руководство по эксплуатации. Ч.1 Техническое описание Б8Я0 1.00.00.000 РЭ.
5. Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Ч. 1.
6. Патент России №2087832. Способ защиты боевой машины от средств воздушного нападения и система для его осуществления. Шипунов А.Г., Богданова Л.А., Березин С.М., Емец А.И. Бюл.№23 от 20.08.97.
7. Патент России №2138757. Способ стрельбы боевой машины по высокоскоростной цели и система для его осуществления. Шипунов А.Г., Березин С.М., Богданова Л.А. Бюл.№27 от 27.09.99.
8. Патент России №2133432. Способ стрельбы боевой машины по высокоскоростной цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А., Сальников С.С. Бюл.№20 от 20.07.99.
9. Патент России №2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. 20.08.2001. Бюл.№23 от 20.08.2001 (прототип).
10. Патент России №2213927. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. Бюл.№28 от 10.10.2003.
11. Патент России №2234045. Способ стрельбы боевой машины по цели и система для его реализации. Березин С.М., Богданова Л.А. Бюл.№22 от 10.08.2004.
12. Патент России №2234044. Способ стрельбы боевой машины по цели и система для его реализации. Березин С.М., Богданова Л.А., Бузовкин М.Б. Бюл.№22 от 10.08.2004.
13. Патент России №2247298. Способ стрельбы боевой машины по скоростной цели и система для его реализации (варианты). Богданова Л.А., Березин С.М. Бюл.№6 от 27.02.05.
14. Патент России №2243482. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. Бюл.№36 от 27.12.04.
15. Патент России №2243483. Способ стрельбы боевой машины по цели (варианты) и система для его реализации. Богданова Л.А., Березин С.М. Бюл.№36 от 27.12.04.
16. В.С.Кузнецов, Г.Ф.Платонов, М.А. Свистунов. Стрельба с закрытых позиций. Под ред.генерал-майора артиллерии С.С.Волкенштейна. Изд. Военной ордена Ленина академии бронетанковых войск им.И.В.Сталина, М., 1958, стр.23.
17. Решение о типовых испытаниях. Приложение А.
18. Заявка на изобретение. Способ стрельбы боевой машины по скоростной цели (варианты) и система для ее реализации. Богданова Л.А., Березин С.М. Приоритетный №2005114471 от 13.05.05.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| Способ согласования оптических осей прицелов и оружия комплекса вооружения боевых машин и система для их осуществления | 2020 |
|
RU2739331C1 |
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| Система управления и наведения вооружения боевой машины | 2019 |
|
RU2723501C1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
Изобретение относится к области военной техники. Технический результат - повышение эффективности стрельбы путем повышения ее точности и быстродействия. Способ заключается в обнаружении и распознавании цели, взятии на сопровождение и сопровождении цели с одновременным дальнометрированием, определении угловых поправок стрельбы из математических выражений, постоянном отклонении с учетом их стволов относительно линии визирования и стрельбе по цели. Выбирают режим работы системы управления огнем (СУО) и тип боеприпаса, в соответствии с которым в пульте управления (ПО) вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, и передают его по запросу баллистического вычислителя (БВ) из ПО в БВ, который передает его в обзорно-прицельную систему и блок управления (БУ). Этим сигналом подготавливают цепи срабатывания электроспуска оружия, в зависимости от типа боеприпаса и порядка загруженных боеприпасов формируют сигнал на переключение подачи патронных лент из правого или левого магазинов системы питания оружия. Подключают патронную ленту с соответствующим типом боеприпаса, с помощью информационно-управляющей системы (ИУС) производят последовательный опрос датчиков ИУС. Перед отработкой силовыми приводами управляющего сигнала осуществляют коммутацию электрических цепей для обеспечения заданного режима работы стабилизатора и СУО. 3 н. и 6 з.п. ф-лы, 7 ил., 2 табл.
1. Способ стрельбы боевой машины (БМ) по цели, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели с одновременным дальнометрированием, определение угловых поправок стрельбы из математических выражений, постоянное отклонение с учетом их стволов оружия относительно линии визирования и стрельбу по цели, отличающийся тем, что перед определением угловых поправок выбирают режим работы системы управления огнем (СУО) и тип боеприпаса, в соответствии с которым в пульте управления (ПО) вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, и передают его по запросу баллистического вычислителя (БВ) из ПО в БВ, который передает его в обзорно-прицельную систему и блок управления (БУ), в соответствии с этим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, в зависимости от типа боеприпаса и порядка загруженных боеприпасов формируют сигнал на переключение подачи патронных лент из правого или левого магазинов системы питания оружия, подключают патронную ленту с соответствующим типом боеприпаса, с помощью информационно-управляющей системы (ИУС), содержащей БВ, производят последовательный опрос датчиков ИУС, причем при необходимости производят экстраполяцию полученных сигналов до следующего момента поступления соответствующей информации, при этом предварительно перед отработкой силовыми приводами управляющего сигнала осуществляют коммутацию электрических цепей для обеспечения заданного режима работы стабилизатора и СУО.
2. Способ стрельбы по п.1, отличающийся тем, что для перехода в режим стрельбы по воздушным целям увеличивают предельные скорости наведения линии визирования прицела наводчика или прицела командира и оружия.
3. Способ стрельбы по п.1, отличающийся тем, что при принятии наводчиком или командиром решения о включении режима автосопровождения цели с помощью оптикотелетепловизионной автоматической системы анализируют образ цели и выдают сигналы наведения на зеркало прицела наводчика или прицела командира, при этом прицельная марка на цели удерживается автоматически.
4. Способ стрельбы боевой машины (БМ) по цели, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели с одновременным дальнометрированием, определение угловых поправок стрельбы из математических выражений, отклонение с учетом их стволов оружия относительно линии визирования и стрельбу по цели, отличающийся тем, что перед определением угловых поправок выбирают режим работы системы управления огнем (СУО) и тип боеприпаса, в соответствии с которым в пульте управления (ПО) вырабатывают логический сигнал, соответствующий выбранному типу оружия и боеприпаса, передают его по запросу баллистического вычислителя (БВ) из ПО в БВ и далее в обзорно-прицельную систему и блок управления (БУ), в соответствии с логическим сигналом подготавливают цепи срабатывания электроспуска соответствующего типа оружия, затем с помощью информационно-управляющей системы (ИУС), содержащей БВ, производят последовательный опрос датчиков ИУС, при необходимости экстраполируют сигналы между замерами, а после вычисления и отработки углов прицеливания и упреждения для выбранного типа боеприпаса отключают стабилизатор от слежения за зеркалом прицела наводчика (ПН), разворачивают ствол оружия на угол заряжания, заряжают боеприпас, возвращают привод вертикального наведения в режим слежения за зеркалом прицела наводчика (ПН) с учетом ранее выработанных углов прицеливания и упреждения, а после выстрела осуществляют экстракцию гильзы, вновь возвращают привод оружия в режим слежения за линией визирования ПН.
5. Информационно-управляющая система (ИУС) комплекса вооружения боевой машины (БМ), содержащая баллистический вычислитель (БВ), автоматический датчик дальности, выполненный в виде лазерного дальномера, автоматический датчик угловой скорости линии визирования в горизонтальной плоскости, автоматический датчик крена, автоматический датчик собственной скорости и курсового угла, отличающаяся тем, что она снабжена блоком управления (БУ), пультом оператора (ПО), пультом командира (ПК), датчиком угловой скорости линии визирования по вертикальному каналу, датчиком угла разворота зеркала прицела по вертикальному каналу, датчиком тангажа, а также автоматическими датчиками внешних условий и температуры заряда, причем первые входы и первые выходы БУ, ПО, БВ, а также автоматические датчики соединены с цифровым каналом связи, второй и третий входы БУ подсоединены соответственно к стабилизатору и обзорно-прицельной системе БМ, выходы БУ подсоединены к входам обзорно-прицельной системы БМ, при этом ПК и ПО взаимно объединены своими входами и выходами, второй выход БВ и третий выход ПО подсоединены к входам стабилизатора, третий вход ПО подсоединен к выходу стабилизатора, при этом БВ реализован в виде перепрограммируемого процессора, лазерный дальномер выполнен высокочастотным и установлен в прицельно-навигационной системе.
6. Информационно-управляющая система по п.5, отличающаяся тем, что датчики крена и тангажа конструктивно объединены и выполнены в виде электромеханического устройства с чувствительным элементом в виде гиромотора, одновременно измеряющего углы крена и тангажа плоскости погона башни.
7. Информационно-управляющая система по п.5, отличающаяся тем, что в качестве датчиков внешних условий использованы датчики ветра, температуры воздуха и давления воздуха.
8. Информационно-управляющая система по п.7, отличающаяся тем, что датчик ветра выполнен в виде последовательно соединенных электромеханического устройства с чувствительным элементом мембранного типа и контроллера.
9. Информационно-управляющая система по п.5, отличающаяся тем, что датчик температуры выполнен в виде последовательно соединенных чувствительного элемента термоэлектронного типа и контроллера.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| ШИПУНОВ А.Г | |||
| и др | |||
| Боевые машины с зенитными свойствами | |||
| - Военный парад, 2004, №4 (июль-август) | |||
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАВОДКИ ОРУДИЯ | 1995 |
|
RU2111437C1 |
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |
| СПОСОБ ПОЛУЧЕНИЯ АСБЕСТО-БИТУМНОЙ ЭМУЛЬСИИ | 2000 |
|
RU2158244C1 |

