Изобретение относится к техническим средствам организации и управления движением поездов, а именно к системам, осуществляющим контроль нахождения подвижного состава на участке пути.
Известно устройство контроля участков пути содержащее систему электрической централизации, источник постоянного напряжения, рельсовую цепь, начало которой соединено с релейным концом, имеющим первое реле, а к ее концу подключен питающий конец, шину передачи данных, анализатор, второе, третье и четвертое реле, а также систему счета осей, выходом соединенную с обмоткой второго реле, где первый общий контакт первого реле подключен к первому общему контакту второго реле и к первому входу анализатора, второй и третий входы которого соединены с тыловыми контактами первого и второго реле соответственно, фронтовые контакты которых соответственно подключены к четвертому и пятому входам анализатора, выходами соединенного с обмоткой третьего реле, а шестой вход анализатора подключен к выходу шины данных, входом соединенной с информационным выходом системы электрической централизации, причем один из полюсов источника постоянного напряжения подключен к общему контакту третьего реле, фронтовой контакт которого соединен со вторым общим контактом первого реле, а тыловой контакт третьего реле подключен ко второму общему контакту второго реле, фронтовой контакт которого соединен со вторым фронтовым контактом первого реле и с одним из выводов обмотки четвертого реле, вторым выводом подключенной к другому полюсу источника постоянного напряжения, а общий, фронтовой и тыловой контакты четвертого реле соединены с управляющими входами системы электрической централизации.
В известном устройстве одновременно с работой рельсовой цепи участка пути, при занятии его подвижной единицей рельсового транспорта, с помощью дублирующей подсистемы контроля свободности участка пути формируют дополнительный сигнал с дублирующей информацией о состоянии этого участка пути. При вступлении подвижного состава на начало участка пути шунтируют рельсовую цепь, выключают первое реле, а после освобождения участка пути подвижным составом шунтирование рельсовой цепи снимают и включают первое реле, причем одновременно с работой рельсовой цепи при вступлении подвижного состава на начало участка пути первым путевым датчиком считают количество осей подвижного состава после вступления подвижного состава на конец участка пути, вторым путевым датчиком вновь считают количество осей подвижного состава и в случае равенства данных о количестве подсчитанных осей, полученных от первого и второго путевых датчиков, после освобождения участка пути подвижным составом, включают второе реле, проверяют работу рельсовой цепи и в случае сбоя или отказа рельсовой цепи контактами второго реле включают третье путевое реле, контактами которого приводят в соответствие стрелки и сигналы станции. Работу рельсовой цепи проверяют непрерывно (RU 2320509, B61L 1/16, 27.03.08).
Недостатки известного технического решения обусловлены сложностью путевых устройств, затрудняющих их внедрение и последующую эксплуатацию, особенно при автоматической блокировке, когда на перегоне имеется несколько блок участков, и низкой надежностью устройств счета осей на участках с движением тяжеловесных и высокоскоростных поездов.
В качестве прототипа выбрана система контроля нахождения подвижного состава на участке пути, содержащая подключенный к рельсовой цепи конца участка пути по ходу движения подвижного состава передающий блок путевой аппаратуры и подключенный к рельсовой цепи начала участка пути по ходу движения подвижного состава приемный блок путевой аппаратуры с функцией измерения сопротивления поездного шунта, входы управления передающего блока и выход приемного блока соединены соответственно с выходом и входом соответствующего блока аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, в каждый подвижной состав со сверхнормативно повышенным сопротивлением поездного шунта введен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а путевая аппаратура, размещенная в начале и в конце участка пути, снабжена приемником дополнительного сигнала занятия путевого участка, подключенным к соответствующему блоку аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов (RU 2508215, B61L 1/16, 27.02.2014).
Недостатком известной системы является недостаточная достоверность обнаружения занятия участков пути с рельсовыми цепями тональных частот, при движении по ним электроподвижного состава с импульсными статическими преобразователями, предназначенных для питания асинхронного тягового привода. При неисправностях средств фильтрации выходного напряжения в таких импульсных статических преобразователях, уровень и частотный состав гармоник тягового тока, поступающих в путевые приемники рельсовых цепей тональной частоты таков, что эти помехи могут в значительной степени влиять на шунтовую чувствительность путевых приемников и привести к не обнаружению на рельсовой цепи поездного шунта, даже если его сопротивление ниже нормативной величины 0.06 Ом. Причина заключается в том, что сигнал помехи, близкой по частоте к несущим частотам тональных рельсовых цепей (см., например, Федоров Н.Е. «Современные системы автоблокировки с тональными рельсовыми цепями» Учебное пособие., Самара: СамГАПС, 2004, стр. 41), применяемых, например, в АБТЦ (ТРЦ3 - 420, 480, 580, 720 и 780 Гц, ТРЦ4 - 4545, 5000, 5555 Гц) или в АБ-УЕ (диапазон частот 1900-2800 Гц), подмешивается к рабочему фазоманипулированному сигналу контроля рельсовой линии. При этом уровень суммарного сигнала может превышать порог срабатывания внутреннего узла декодирования фазоманипулированного сигнала в путевом приемнике даже при сопротивлении поездного шунта ниже нормативной величины 0.06 Ом, в результате чего рельсовая цепь тональной частоты может оставаться в состоянии ложной свободности при занятии ее подвижным составом с поездным шунтом ниже нормативной величины 0.06 Ом, что недопустимо для безопасности движения поездов.
Технический результат изобретения заключается в повышении достоверности контроля нахождения на участке пути с рельсовыми цепями тональной частоты электроподвижного состава с повышенным уровнем и содержанием гармоник в цепях питания тягового привода.
Технический результат достигается тем, что в системе контроля нахождения подвижного состава на участке пути, содержащей подключенный к рельсовой цепи конца участка пути, по ходу движения подвижного состава, передающий блок путевой аппаратуры передающего конца рельсовой цепи и подключенный к рельсовой цепи начала участка пути, по ходу движения подвижного состава, приемный блок путевой аппаратуры приемного конца рельсовой цепи с функцией измерения сопротивления поездного шунта, вход управления передающего блока и выход приемного блока соединены соответственно с выходом и входом соответствующих блоков аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, на каждом подвижном составе со сверхнормативно повышенным сопротивлением поездного шунта установлен блок формирования дополнительного сигнала занятия участка пути, который соединен с блоком бортовой аппаратуры управления, а блок бортовой аппаратуры управления через локальный радиоканал связи соединен с приемниками дополнительного сигнала занятия путевого участка блоков путевой аппаратуры приемных концов рельсовых цепей, а через системный радиоканал соединен с блоками аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, согласно изобретению на каждом электроподвижном составе с импульсными статическими преобразователями для питания асинхронных тяговых электродвигателей установлен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а блоки аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, принадлежащие к путевым участкам с рельсовыми цепями тональной частоты, через первую линию связи соединены с компьютером автоматизированного рабочего места диспетчера службы связи и сигнализации, который через вторую линию связи соединен с компьютером автоматизированного рабочего места поездного диспетчера, при этом к дополнительному выходу приемника дополнительного сигнала занятия путевого участка путевой аппаратуры приемного конца рельсовых цепей тональной частоты, подключена обмотка электромагнитного реле, размыкающие контакты которого включены последовательно с выходом приемного блока путевой аппаратуры соответствующей рельсовой цепи тональной частоты.
На чертеже приведена схема предлагаемой системы контроля нахождения подвижного состава на участке пути.
Система контроля нахождения подвижного состава на участке пути содержит подключенный к рельсовой цепи 1 (на чертеже показан участок пути с одной рельсовой цепью) конца участка пути, по ходу движения подвижного состава 2, передающий блок 3 путевой аппаратуры 4 передающего конца рельсовой цепи 1 и подключенный к рельсовой цепи 1 начала участка пути, по ходу движения подвижного состава 2, приемный блок 5 путевой аппаратуры 6 приемного конца рельсовой цепи 1 с функцией измерения сопротивления поездного шунта, вход управления передающего блока 3 и выход приемного блока 5 соединены соответственно с выходом и входом соответствующих блоков 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, на каждом подвижном составе 2 со сверхнормативно повышенным сопротивлением поездного шунта установлен блок 8 формирования дополнительного сигнала занятия участка пути, который соединен с блоком 9 бортовой аппаратуры управления, а блок 9 бортовой аппаратуры управления через локальный радиоканал 10 связи соединен с приемниками 11 дополнительного сигнала занятия путевого участка блоков 6 путевой аппаратуры приемных концов рельсовых цепей 1, а через системный радиоканал 12 соединен с блоками 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, на каждом электроподвижном составе 2 с импульсными статическими преобразователями для питания асинхронных тяговых электродвигателей установлен блок 8 формирования дополнительного сигнала занятия путевого участка, который соединен с блоком 9 бортовой аппаратуры управления, а блоки 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, принадлежащие к путевым участкам с рельсовыми цепями 1 тональной частоты, через первую линию связи соединены с компьютером 13 автоматизированного рабочего места диспетчера службы связи и сигнализации, который через вторую линию связи соединен с компьютером 14 автоматизированного рабочего места поездного диспетчера, при этом к дополнительному выходу приемника 11 дополнительного сигнала занятия путевого участка путевой аппаратуры 6 приемного конца рельсовых цепей 1 тональной частоты подключена обмотка электромагнитного реле 15, размыкающие контакты которого включены последовательно с выходом приемного блока 6 путевой аппаратуры соответствующей рельсовой цепи 1 тональной частоты.
Система контроля нахождения подвижного состава на участке пути работает следующим образом.
Когда на рельсовой цепи 1 участка пути отсутствует подвижной состав 2, передающий блок 3 путевой аппаратуры 4 подает в рельсовую цепь 1 сигнал контроля рельсовой линии, который поступает в приемный блок 5 путевой аппаратуры 6, вследствие чего обеспечивается выдача сигнала свободности участка пути. При занятии участка пути подвижным составом 2 рельсового транспорта, имеющим нормативное сопротивление поездного шунта, амплитуда напряжения этого сигнала на входе приемного блока 5 путевой аппаратуры 6 снижается и приемный блок 5 выдает сигнал занятости участка пути, фиксируемый затем в блоке 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов.
При занятии участка пути подвижным составом 2 рельсового транспорта, имеющим сверхнормативно повышенное сопротивление поездного шунта, или же электроподвижным составом, имеющим неисправные импульсные статические преобразователи (например, с неисправными фильтрами), для питания асинхронных тяговых электродвигателей, уменьшение уровня сигнала, который поступает в приемный блок 5 путевой аппаратуры 6, может оказаться недостаточным для фиксации приемным блоком 5 путевой аппаратуры 6 занятости участка пути. Однако подвижной состав 2 рельсового транспорта посредством блока 8 формирования дополнительного сигнала занятия участка пути сам формирует дополнительный сигнал занятия участка пути, который через блок 9 бортовой аппаратуры управления передается по маломощному локальному радиоканалу 10 в приемники 11 дополнительного сигнала занятия, относящиеся к занятому участку пути. Приемники 11 дополнительного сигнала занятия путевого участка срабатывают и выдают сигнал занятости участка пути до момента времени полного его освобождения подвижным составом 2 рельсового транспорта, имеющего сверхнормативное сопротивление поездного шунта, фиксируемого в блоках 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов. В случае подвижного состава 2 с импульсными статическими преобразователями сигналы в приемники 11 дополнительного сигнала занятия путевого участка передаются отдельно для соответствующих рельсовых цепей тональной частоты во время нахождения локомотивов этого состава в пределах этих рельсовых цепей. Координаты места нахождения локомотивов определяются средствами навигации их блоков 9 бортовой аппаратуры управления. В случае электропоездов или грузовых поездов, имеющих несколько ведущих локомотивов, эти координаты передает блок 9 бортовой аппаратуры управления каждого локомотива с включенными тяговыми двигателями.
Блоки 9 бортовой аппаратуры управления локомотивов с малой периодичностью вычисляют текущие координаты места нахождения начала и конца своего подвижного состава 2 рельсового транспорта из электронной карты маршрута и по известной длине состава 2 и известным координатам границ рельсовых цепей вычисляют как моменты времени занятия, так и моменты освобождения подвижным составом этих рельсовых цепей 1.
После освобождения подвижным составом 2 каждой очередной рельсовой цепи 1, от блока 8 формирования дополнительного сигнала занятия путевого участка поступает команда снятия дополнительного сигнала занятости рельсовой цепи 1. Под действием упомянутых сигналов электромагнитные реле 15 своими размыкающими контактами дополнительно обеспечивают прерывание цепи выходного сигнала приемных блоков 5 путевой аппаратуры 6 соответствующих рельсовых цепей 1 тональной частоты и посылку надежного сигнала занятия (логический 0) в течение всего времени занятия каждой из рельсовых цепей 1 тональной частоты во время следования по ним подвижного состава 2 с импульсными статическими преобразователями.
При централизованной системе автоблокировки координаты своего места нахождения в привязке к электронной карте маршрута движения блоки 9 бортовой аппаратуры управления локомотивов передают в блоки 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов через системный радиоканал 12 связи. Затем также и в блоках 7 формируются дополнительные сигналы занятия и освобождения участков пути и/или их рельсовых цепей 1.
Эти дополнительные сигналы воздействуют на блоки аппаратуры контроля рельсовых цепей и влияют на логику принятия решений о свободности и занятости путевых участков.
Блоки 7 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, относящиеся к участку пути с рельсовыми цепями 1 тональной частоты, способны зафиксировать появление электроподвижного состава 2, имеющего неисправные импульсные статические преобразователи (например, с неисправными фильтрами) посредством сравнения напряжения, поступающего в приемные блоки 5 путевой аппаратуры 6 рельсовых цепей 1 тональной частоты во время движения такого состава по ним с установленными нормами и при обнаружении завышенного напряжения на входе блока 5 передать эту информацию через первую линию связи в компьютер 13 автоматизированного рабочего места диспетчера службы связи и сигнализации. Затем из компьютера 13 эта информация передается автоматически через вторую линию связи в компьютер 14 автоматизированного рабочего места поездного диспетчера.
Поездной диспетчер по получении этой информации должен совместно, например, с диспетчером управления локомотивным парком организовать скорейшее устранение обнаруженной на локомотиве неисправности или заменить его локомотивом, не влияющим на правильную работу рельсовых цепей тональной частоты. Эта мера позволяет обеспечить соответствие системы требованиям железнодорожных стандартов по вероятности опасного отказа. В компьютере 14 автоматизированного рабочего места поездного диспетчера автоматически контролируется, что устранение неисправности осуществляется в течение разрешенного периода времени. Если этот период времени истекает, то поездной диспетчер автоматически извещается о необходимости принудительной остановки данного поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для контроля нахождения подвижного состава на участке пути с неограниченными рельсовыми цепями тональной частоты | 2017 |
|
RU2656922C1 |
| СПОСОБ КОНТРОЛЯ НАХОЖДЕНИЯ ПОДВИЖНОГО СОСТАВА НА УЧАСТКЕ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2508215C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОЙ АВТОБЛОКИРОВКИ С БЕССТЫКОВЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ ТОНАЛЬНОЙ ЧАСТОТЫ | 2014 |
|
RU2562027C1 |
| СИСТЕМА ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2014 |
|
RU2550377C1 |
| Система интервального регулирования движения поездов | 2017 |
|
RU2653672C1 |
| Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты | 2019 |
|
RU2698591C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2014 |
|
RU2550795C1 |
| Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты | 2018 |
|
RU2693992C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2519323C1 |
| Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты | 2021 |
|
RU2760055C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Система включает установленный на каждом электроподвижном составе с импульсными статическими преобразователями для питания асинхронных тяговых электродвигателей блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а блоки аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов через первую линию связи соединены с компьютером автоматизированного рабочего места диспетчера службы связи и сигнализации, который через вторую линию связи соединен с компьютером автоматизированного рабочего места поездного диспетчера. Причем к дополнительному выходу приемника дополнительного сигнала занятия путевого участка путевой аппаратуры приемного конца рельсовых цепей тональной частоты подключена обмотка электромагнитного реле, размыкающие контакты которого включены последовательно с выходом приемного блока путевой аппаратуры соответствующей рельсовой цепи тональной частоты. Достигается повышение надежности контроля занятия пути электроподвижным составом. 1 ил.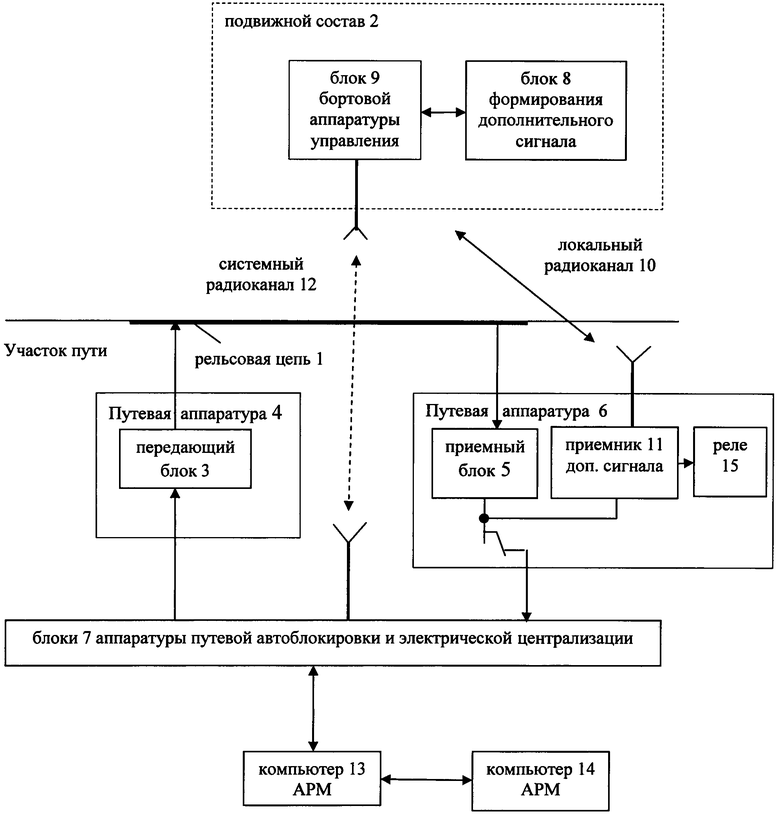
Система контроля нахождения подвижного состава на участке пути, содержащая подключенный к рельсовой цепи конца участка пути, по ходу движения подвижного состава, передающий блок путевой аппаратуры передающего конца рельсовой цепи и подключенный к рельсовой цепи начала участка пути, по ходу движения подвижного состава, приемный блок путевой аппаратуры приемного конца рельсовой цепи с функцией измерения сопротивления поездного шунта, вход управления передающего блока и выход приемного блока соединены соответственно с выходом и входом соответствующих блоков аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, на каждом подвижном составе со сверхнормативно повышенным сопротивлением поездного шунта установлен блок формирования дополнительного сигнала занятия участка пути, который соединен с блоком бортовой аппаратуры управления, а блок бортовой аппаратуры управления через локальный радиоканал связи соединен с приемниками дополнительного сигнала занятия путевого участка блоков путевой аппаратуры приемных концов рельсовых цепей, а через системный радиоканал соединен с блоками аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, отличающаяся тем, что на каждом электроподвижном составе с импульсными статическими преобразователями для питания асинхронных тяговых электродвигателей установлен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а блоки аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, принадлежащие к путевым участкам с рельсовыми цепями тональной частоты, через первую линию связи соединены с компьютером автоматизированного рабочего места диспетчера службы связи и сигнализации, который через вторую линию связи соединен с компьютером автоматизированного рабочего места поездного диспетчера, при этом к дополнительному выходу приемника дополнительного сигнала занятия путевого участка путевой аппаратуры приемного конца рельсовых цепей тональной частоты подключена обмотка электромагнитного реле, размыкающие контакты которого включены последовательно с выходом приемного блока путевой аппаратуры соответствующей рельсовой цепи тональной частоты.
| СПОСОБ КОНТРОЛЯ НАХОЖДЕНИЯ ПОДВИЖНОГО СОСТАВА НА УЧАСТКЕ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2508215C1 |
| СПОСОБ КОНТРОЛЯ УЧАСТКОВ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2320509C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ УЧАСТКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383459C1 |
| Способ ультразвуковой очистки деталей | 1979 |
|
SU878373A1 |

