Изобретение относится к техническим средствам организации и управления движением поездов, а именно к устройствам, осуществляющим контроль нахождения подвижного состава на участке пути.
Известен способ контроля нахождения подвижного состава на участке пути, по которому контроль наличия подвижного состава осуществляют посредством использования рельсовых цепей переменного тока с реализацией режима автоматической локомотивной сигнализации (Котляренко Н.Ф. Электрические рельсовые цепи. - М.:Трансжелдориздат, 1961, с.144, рис.IX-11).
Недостатком этого способа и реализующего его устройства является невысокая надежность контроля состояния занятости путевых участков подвижными единицами рельсового транспорта, имеющими сверхнормативно повышенное сопротивление поездного шунта. Шунтовой режим работы рельсовых цепей рассчитывается из предположения, что сопротивление поездного шунта (сопротивление колесных пар подвижной единицы и переходные сопротивления "рельс-колесо") всегда меньше 0,06 Ом (Н.Е.Федоров «Релейные и микроэлектронные системы интервального регулирования движения поездов» "Автоматика, телемеханика и связь на железнодорожном транспорте", часть 1, с.55 формула 3.3). Это условие не всегда выполняется, особенно для коротких подвижных единиц рельсового транспорта, таких как, например, специальные машины для ремонта или диагностирования состояния пути.
Наиболее близким к предлагаемому техническому решению является способ контроля нахождения подвижного состава на участке пути, по которому одновременно с работой рельсовой цепи участка пути при занятии его подвижной единицей рельсового транспорта дублирующей системой контроля свободности участка пути формируют дополнительный сигнал с дублирующей информацией о состоянии этого участка пути. При вступлении подвижного состава на начало участка пути шунтируют рельсовую цепь, выключают первое реле, а после освобождения участка пути подвижным составом шунтирование рельсовой цепи снимают и включают первое реле, причем одновременно с работой рельсовой цепи при вступлении подвижного состава на начало участка пути первым путевым датчиком считают количество осей подвижного состава, после вступления подвижного состава на конец участка пути вторым путевым датчиком вновь считают количество осей подвижного состава и в случае равенства данных о количестве подсчитанных осей, полученных от первого и второго путевых датчиков после освобождения участка пути подвижным составом, включают второе реле, проверяют работу рельсовой цепи и в случае сбоя или отказа рельсовой цепи контактами второго реле включают третье путевое реле, контактами которого приводят в соответствие стрелки и сигналы станции. Работу рельсовой цепи проверяют непрерывно.
Устройство для осуществления известного способа содержит систему электрической централизации, источник постоянного напряжения и рельсовую цепь, начало которой соединено с релейным концом, имеющим первое реле, а к ее концу подключен питающий конец, шину передачи данных, анализатор, второе, третье и четвертое реле, систему счета осей, выходом соединенную с обмоткой второго реле, первый общий контакт первого реле подключен к первому общему контакту второго реле и к первому входу анализатора, второй и третий входы которого соединены с тыловыми контактами первого и второго реле соответственно, фронтовые контакты которых соответственно подключены к четвертому и пятому входам анализатора, выходами соединенного с обмоткой третьего реле, шестой вход анализатора подключен к выходу шины данных, вход которой соединен с информационным выходом системы электрической централизации, один из полюсов источника постоянного напряжения подключен к общему контакту третьего реле, фронтовой контакт которого соединен со вторым общим контактом первого реле, тыловой контакт третьего реле подключен ко второму общему контакту второго реле, фронтовой контакт которого соединен со вторым фронтовым контактом первого реле и с одним из выводов обмотки четвертого реле, вторым выводом подключенной к другому полюсу источника постоянного напряжения, общий фронтовой и тыловой контакты четвертого реле соединены с управляющими входами системы электрической централизации (RU 2320509, B61L 1/16, 27.03.08).
Известное техническое решение позволяет обеспечить достаточную надежность контроля состояния занятости участков пути подвижными единицами рельсового транспорта, имеющими сверхнормативное повышенное сопротивление поездного шунта, за счет дополнительного контроля посредством счета осей, однако требует значительного усложнения путевых устройств, затрудняющего внедрение и последующую эксплуатацию.
Технический результат изобретения заключается в упрощении путевой аппаратуры при сохранении требуемого уровня надежности контроля состояния занятости путевых участков подвижными единицами рельсового транспорта, имеющими сверхнормативное повышенное сопротивление поездного шунта.
В части способа технический результат достигается тем, что в способе контроля нахождения подвижного состава на участке пути, по которому в рельсовую цепь участка пути по ходу движения подвижного состава подают контрольный сигнал, который измеряют на начальном участке пути по ходу движения подвижного состава, и по изменению величины принимаемого сигнала принимают решение о нахождении подвижного состава на участке пути, согласно изобретению на подвижном составе формируют дополнительный сигнал занятия путевого участка, который передают от момента вступления подвижного состава на участок пути до полного освобождения участка пути подвижным составом, принимают этот сигнал на начальном и конечном участках пути по ходу движения подвижного состава и по его наличию принимают решение о нахождении подвижного состава на участке пути.
Дополнительный сигнал занятия путевого участка передают по радиоканалу.
В части устройства технический результат достигается тем, что в системе контроля нахождения подвижного состава на участке пути, содержащей подключенный к рельсовой цепи конца участка пути по ходу движения подвижного состава передающий блок путевой аппаратуры и подключенный к рельсовой цепи начала участка пути по ходу движения подвижного состава приемный блок путевой аппаратуры с функцией измерения сопротивления поездного шунта, входы управления передающего блока и выход приемного блока соединены соответственно с выходом и входом соответствующего блока аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, согласно изобретению в каждый подвижной состав со сверхнормативно повышенным сопротивлением поездного шунта введен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а путевая аппаратура, размещенная в начале и в конце участка пути, снабжена приемником дополнительного сигнала занятия путевого участка, подключенным к соответствующему блоку аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов.
На чертеже приведена схема системы контроля нахождения подвижного состава на участке пути.
Система контроля нахождения подвижного состава на участке пути содержит подключенный к рельсовой цепи 1 конца участка 2 пути по ходу движения подвижного состава 3 передающий блок 4 путевой аппаратуры 5 и подключенный к рельсовой цепи 1 начала участка 2 пути по ходу движения подвижного состава 3 приемный блок 6 путевой аппаратуры 7 с функцией измерения сопротивления поездного шунта, входы управления передающего блока 4 и выход приемного блока 6 соединены соответственно с выходом и входом соответствующего блока 8 (9) аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, в каждом подвижном составе 3 со сверхнормативно повышенным сопротивлением поездного шунта введен блок 10 формирования дополнительного сигнала занятия путевого участка, который соединен с блоком 11 бортовой аппаратуры управления, путевая аппаратура 5 (7), размещенная в конце и в начале участка пути, снабжена приемником 12 (13) дополнительного сигнала занятия путевого участка, подключенным к соответствующему блоку 8 (9) аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов.
Система контроля нахождения подвижного состава на участке пути работает следующим образом.
Когда на рельсовой цепи участка 2 пути отсутствует подвижной состав, передающий блок 4 путевой аппаратуры 5 подает в рельсовую цепь 1 переменное напряжение, которое поступает в приемный блок 6 путевой аппаратуры 7, вследствие чего обеспечивается выдача сигнала свободности участка 2 пути. При занятии участка 2 пути подвижным составом 3 рельсового транспорта, имеющим нормативное сопротивление поездного шунта, напряжение, поступающее в приемный блок 6 путевой аппаратуры 7, падает и приемный блок 6 выдает сигнал занятости участка 2 пути, фиксируемый блоком 9 аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов.
При занятии участка 2 пути подвижным составом 3 рельсового транспорта, имеющим сверхнормативно повышенное сопротивление поездного шунта, изменение уровня напряжения, которое поступает в приемный блок 6 путевой аппаратуры 7, для выдачи сигнала занятости участка 2 пути может оказаться недостаточным для срабатывания приемного блока 6 путевой аппаратуры 7. Такой подвижной состав 3 рельсового транспорта, имеющий сверхнормативно повышенное сопротивление поездного шунта, посредством блока 10 формирует дополнительный сигнал занятия путевого участка 2, который через блок 11 бортовой аппаратуры управления передает его на приемник 12 (13) дополнительного сигнала занятия путевого участка. Приемники 12 и 13 дополнительного сигнала занятия путевого участка срабатывают и выдают сигнал занятости участка 2 пути до полного освобождения участка пути подвижным составом 3 рельсового транспорта, фиксируемого устройствами 8 (9) автоблокировки и электрической централизации стрелок и сигналов.
Дополнительный сигнал с подвижного состава 3 рельсового транспорта передают на приемники 12 и 13 по радиоканалу. При соответствующей реализации передача дополнительного сигнала может быть организована через локальный канал индуктивной связи. Формирование дополнительного сигнала, приводящего к переходу путевой аппаратуры, подключенной к рельсовой цепи участка, в состояние занятости не требует внесения существенных изменений в существующие путевые устройства.
При централизованной системе автоблокировки дополнительный сигнал формируют в аппаратуре контроля рельсовых цепей центрального поста электрической централизации после получения с подвижного состава 3 через системный радиоканал связи (на чертеже не показан) информации о текущих координатах, определенных бортовыми средствами навигации, находящимися в блоке 11 бортовой аппаратуры управления. Например, в системе АБТЦ-М (проспект Ижевского радиозавода на систему АБЦТ-М, с.3) этот сигнал может воздействовать на блок управления и влиять на логику принятия решений о свободности и занятости путевых участков. В качестве блока 11 бортовой аппаратуры управления может быть использовано, например, унифицированное комплексное локомотивное устройство безопасности (КЛУБ-У). Поскольку подвижные составы рельсового транспорта, имеющие сверхнормативно повышенное сопротивление поездного шунта, составляют малый процент от общего количества подвижных единиц, то затраты на внедрение предлагаемого изобретения существенно меньше в сравнении с системами, предусматривающими значительное усложнение путевых устройств, затрудняющее внедрение и последующую их эксплуатацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОНТРОЛЯ НАХОЖДЕНИЯ ПОДВИЖНОГО СОСТАВА НА УЧАСТКЕ ПУТИ | 2014 |
|
RU2572013C1 |
| Система для контроля нахождения подвижного состава на участке пути с неограниченными рельсовыми цепями тональной частоты | 2017 |
|
RU2656922C1 |
| Способ проверки выполнения шунтового режима работы электрической рельсовой цепи | 2022 |
|
RU2791474C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ И СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ЕЮ РЕАЛИЗУЕМЫЙ | 2014 |
|
RU2572278C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОЙ АВТОБЛОКИРОВКИ С БЕССТЫКОВЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ ТОНАЛЬНОЙ ЧАСТОТЫ | 2014 |
|
RU2562027C1 |
| СИСТЕМА ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2014 |
|
RU2550377C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| Способ интервального регулирования движения поездов с использованием блок-участков, светофоров и обнаружением вмешательства в логику работы | 2021 |
|
RU2775905C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513877C1 |
| Устройство для централизованной автоблокировки с бесстыковыми рельсовыми цепями тональной частоты | 2018 |
|
RU2693992C1 |
Группа изобретений относится к контролю нахождения подвижного состава на участке пути. Способ контроля нахождения подвижного состава на участке пути заключается в том, что в рельсовую цепь участка подают сигнал, который измеряют на начальном участке пути, а по изменению принимаемого сигнала определяют нахождение состава на участке пути. На подвижном составе формируют дополнительный сигнал занятия путевого участка, передают и принимают этот сигнал на начальном и конечном участках пути и по его наличию принимают решение о нахождении подвижного состава на участке пути. Система контроля содержит передающий блок путевой аппаратуры и приемный блок путевой аппаратуры. Дополнительно в каждый подвижной состав введен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления. Путевая аппаратура, начального и конечного участка пути снабжена приемником дополнительного сигнала занятия путевого участка. Приемник подключен к блоку аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов. Решение направлено на повышение надежности контроля. 2 н. и 1 з.п. ф-лы, 1 ил.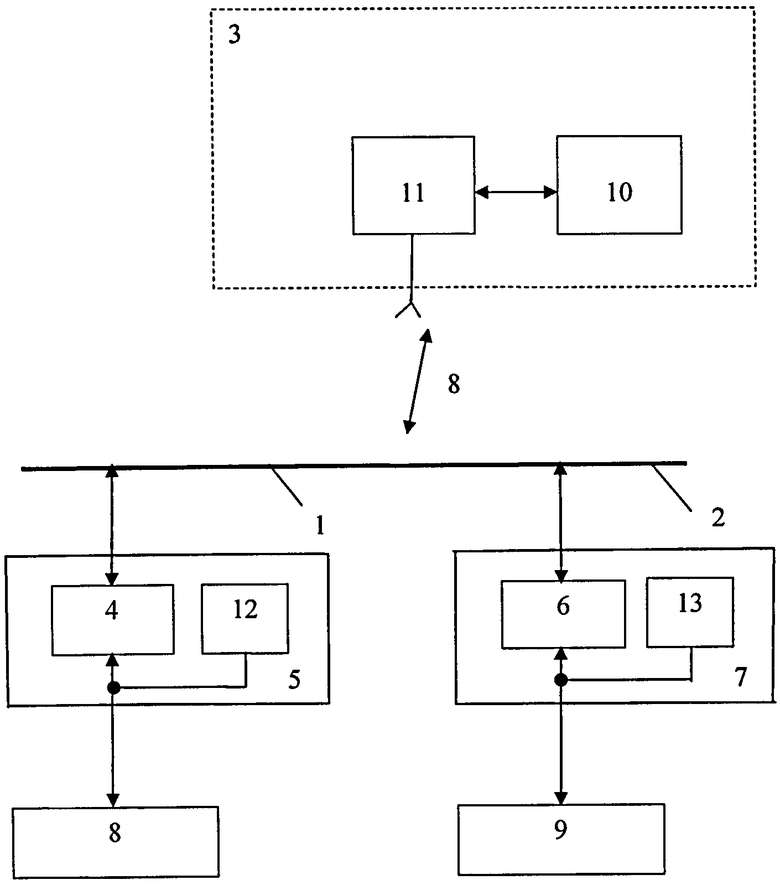
1. Способ контроля нахождения подвижного состава на участке пути, по которому в рельсовую цепь участка пути по ходу движения подвижного состава подают контрольный сигнал, который измеряют на начальном участке пути по ходу движения подвижного состава, и по изменению величины принимаемого сигнала принимают решение о нахождении подвижного состава на участке пути, отличающийся тем, что на подвижном составе формируют дополнительный сигнал занятия путевого участка, который передают от момента вступления подвижного состава на участок пути до полного освобождения участка пути подвижным составом, принимают этот сигнал на начальном и конечном участках пути по ходу движения подвижного состава и по его наличию принимают решение о нахождении подвижного состава на участке пути.
2. Способ контроля нахождения подвижного состава на участке пути по п.1, отличающийся тем, что дополнительный сигнал занятия путевого участка передают по радиоканалу.
3. Система контроля нахождения подвижного состава на участке пути, содержащая подключенный к рельсовой цепи конца участка пути по ходу движения подвижного состава передающий блок путевой аппаратуры и подключенный к рельсовой цепи начала участка пути по ходу движения подвижного состава приемный блок путевой аппаратуры с функцией измерения сопротивления поездного шунта, входы управления передающего блока и выход приемного блока соединены соответственно с выходом и входом соответствующего блока аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов, отличающаяся тем, что в каждый подвижной состав со сверхнормативно повышенным сопротивлением поездного шунта введен блок формирования дополнительного сигнала занятия путевого участка, который соединен с блоком бортовой аппаратуры управления, а путевая аппаратура, размещенная в начале и в конце участка пути, снабжена приемником дополнительного сигнала занятия путевого участка, подключенным к соответствующему блоку аппаратуры путевой автоблокировки и электрической централизации стрелок и сигналов.
| СПОСОБ КОНТРОЛЯ УЧАСТКОВ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2320509C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ УЧАСТКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383459C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ ОТ ПОЕЗДА УЧАСТКА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2104894C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ И РЕЛЬСОВАЯ ЦЕПЬ ПОВЫШЕННОЙ ДЛИНЫ | 1995 |
|
RU2117596C1 |

