Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления для двигателя внутреннего сгорания.
Уровень техники
JP2003-120343A раскрывает традиционное устройство управления для двигателя внутреннего сгорания, в котором объем всасываемого воздуха регулируется посредством управления как дроссельным клапаном, так и механизмом регулирования впускного клапана таким образом, чтобы достигать целевого крутящего момента, вычисленного на основании рабочего режима двигателя внутреннего сгорания.
Раскрытие изобретения
Один из способов для подавления вибрации кузова транспортного средства представляет собой способ для уменьшения вибрации кузова транспортного средства посредством наложения компонента вибрации для подавления вибрации кузова транспортного средства на целевой крутящий момент, чтобы периодически варьировать крутящий момент двигателя.
Тем не менее, в случае традиционного устройства управления для двигателя внутреннего сгорания, описанного выше, компонент вибрации для подавления вибрации кузова транспортного средства накладывается на целевые значения управления и дроссельного клапана и механизма регулирования впускного клапана, если как дроссельный клапан, так и механизм регулирования впускного клапана управляются посредством наложения компонента вибрации, допускающего подавление вибрации кузова транспортного средства, на целевой крутящий момент, чтобы управлять вибрацией кузова транспортного средства.
Здесь плотность всасываемого воздуха во впускном коллекторе (плотность всасываемого воздуха ниже дроссельного клапана) изменяется с заданной задержкой реакции на впуске после того, как управляется дроссельный клапан. С другой стороны, объем цилиндра во время закрытия впускного клапана (в дальнейшем в этом документе называется «полезным объемом цилиндра») изменяется одновременно с тем, как управляется механизм регулирования впускного клапана.
Таким образом, если компонент вибрации для подавления вибрации кузова транспортного средства накладывается на целевые значения управления как дроссельного клапана, так и механизма регулирования впускного клапана, возникает такая проблема, что создается разность фаз между компонентами вибрации, накладываемыми на оба элемента вследствие разностей скоростей реакции для плотности всасываемого воздуха и полезного объема цилиндра, не может получаться требуемый крутящий момент двигателя, и не может подавляться вибрация кузова транспортного средства.
Настоящее изобретение осуществлено в свете этой проблемы и нацелено на получение требуемого варьирования крутящего момента двигателя и подавление вибрации кузова транспортного средства посредством надлежащего управления дроссельным клапаном и механизмом регулирования впускного клапана.
Согласно одному аспекту настоящего изобретения предложено устройство управления для двигателя внутреннего сгорания, установленного на транспортном средстве, которое включает в себя дроссельный клапан, предусмотренный во впускном канале двигателя внутреннего сгорания и допускающий изменение площади поперечного сечения впускного канала, регулируемый клапан, допускающий изменение времен открытия и закрытия впускного клапана двигателя внутреннего сгорания, средство вычисления базового целевого крутящего момента для вычисления базового целевого крутящего момента двигателя внутреннего сгорания согласно рабочему режиму двигателя внутреннего сгорания, средство вычисления целевого крутящего момента для управления вибрацией для вычисления целевого крутящего момента для управления вибрацией двигателя внутреннего сгорания таким образом, чтобы подавлять вибрацию транспортного средства согласно компоненту вибрации транспортного средства, и средство управления объемом всасываемого в цилиндры воздуха для управления одним из дроссельного клапана и регулируемого клапана согласно целевому крутящему моменту для управления вибрацией и управления другим из дроссельного клапана и регулируемого клапана согласно базовому целевому крутящему моменту.
Варианты осуществления и преимущества настоящего изобретения подробно описаны ниже со ссылкой на сопровождающие чертежи.
Краткое описание чертежей
Фиг. 1 является принципиальной схемой конфигурации устройства управления вибрацией транспортного средства согласно первому варианту осуществления,
Фиг. 2 является графиком, показывающим каждую изокванту объема всасываемого в цилиндры воздуха, когда вертикальная ось представляет плотность всасываемого воздуха во впускном коллекторе, а горизонтальная ось представляет полезный объем цилиндра,
Фиг. 3 является блок-схемой, показывающей управление двигателем для подавления вибрации кузова транспортного средства согласно первому варианту осуществления настоящего изобретения,
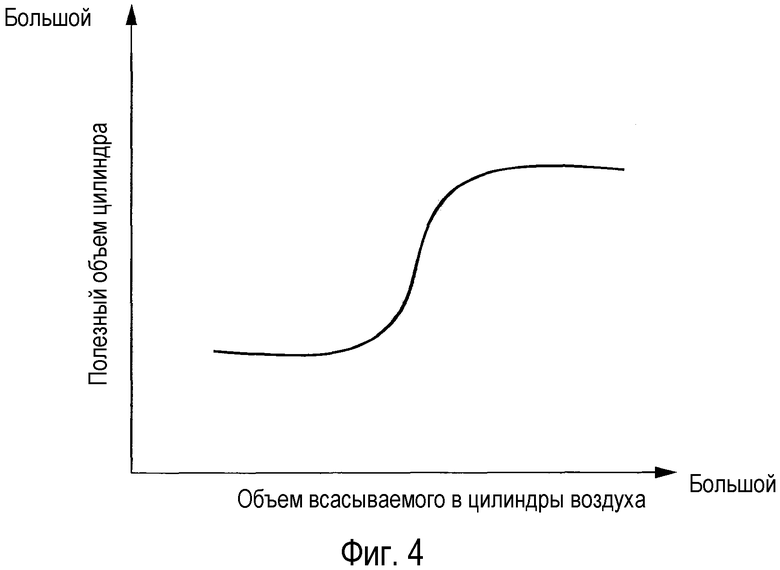
Фиг. 4 является таблицей для вычисления полезного объема цилиндра на основании объема всасываемого в цилиндры воздуха,
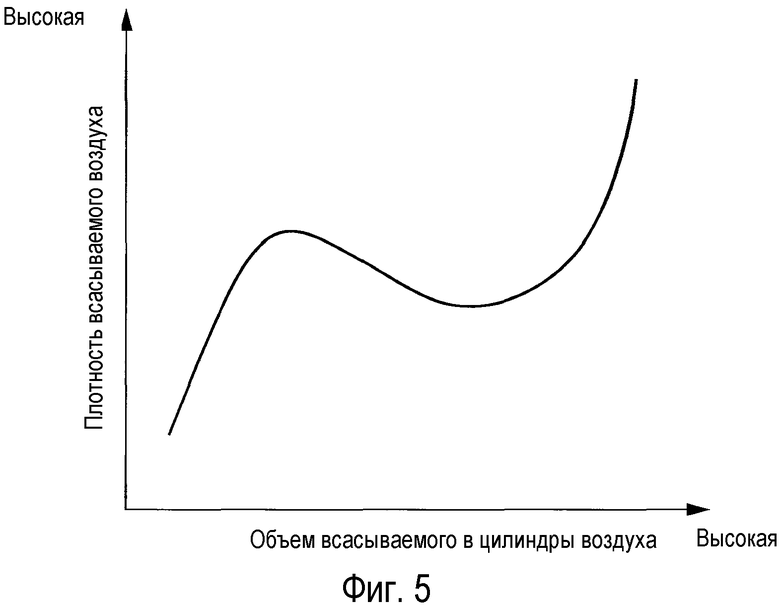
Фиг. 5 является таблицей для вычисления плотности всасываемого воздуха на основании объема всасываемого в цилиндры воздуха,
Фиг. 6 является таблицей для вычисления целевого времени закрытия впускного клапана на основании целевого полезного объема цилиндра,
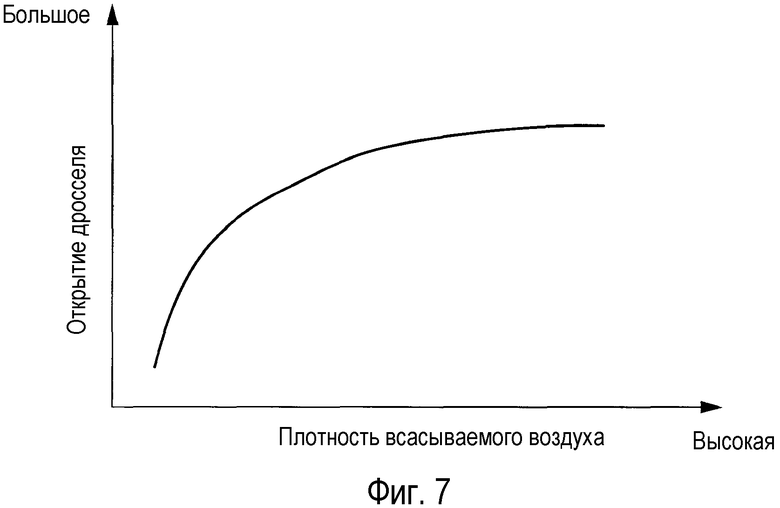
Фиг. 7 является таблицей для вычисления целевого открытия дросселя на основании целевой плотности всасываемого воздуха,
Фиг. 8 является блок-схемой, показывающей содержимое управления двигателем для подавления вибрации кузова транспортного средства согласно первому варианту осуществления настоящего изобретения,
Фиг. 9 является блок-схемой, показывающей содержимое управления двигателем для подавления вибрации кузова транспортного средства согласно первому варианту осуществления настоящего изобретения,
Фиг. 10 являются временными диаграммами, показывающими операцию управления двигателем для подавления вибрации кузова транспортного средства согласно первому варианту осуществления настоящего изобретения,
Фиг. 11 являются временными диаграммами, показывающими управление двигателем для подавления вибрации кузова транспортного средства согласно первому варианту осуществления настоящего изобретения,
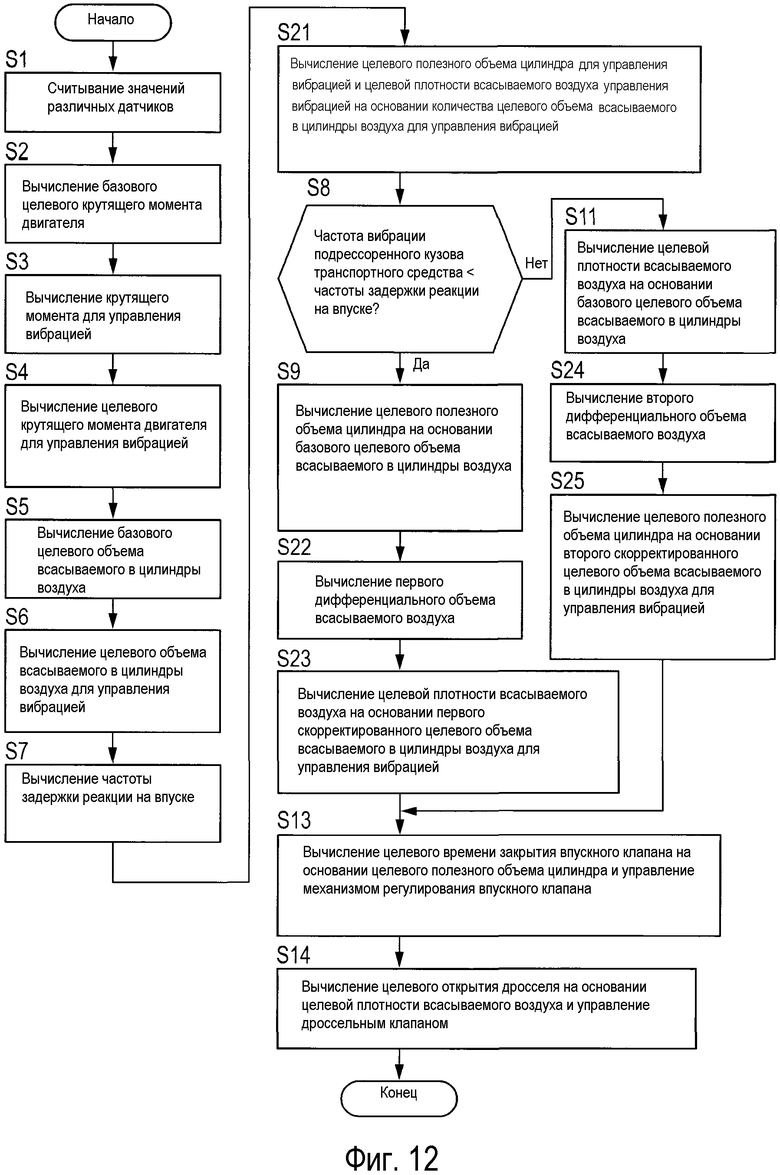
Фиг. 12 является блок-схемой, показывающей управление двигателем для подавления вибрации кузова транспортного средства согласно второму варианту осуществления настоящего изобретения, и
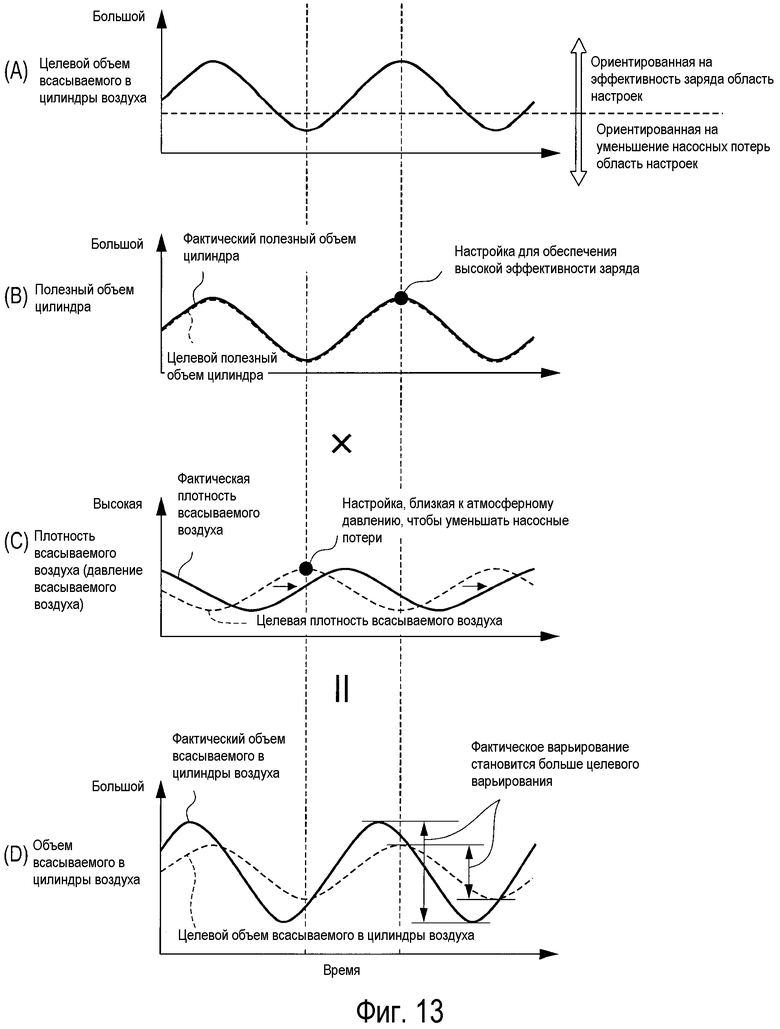
Фиг. 13 являются схемами, показывающими проблему посредством сравнительного примера.
Осуществление изобретения
Первый вариант осуществления
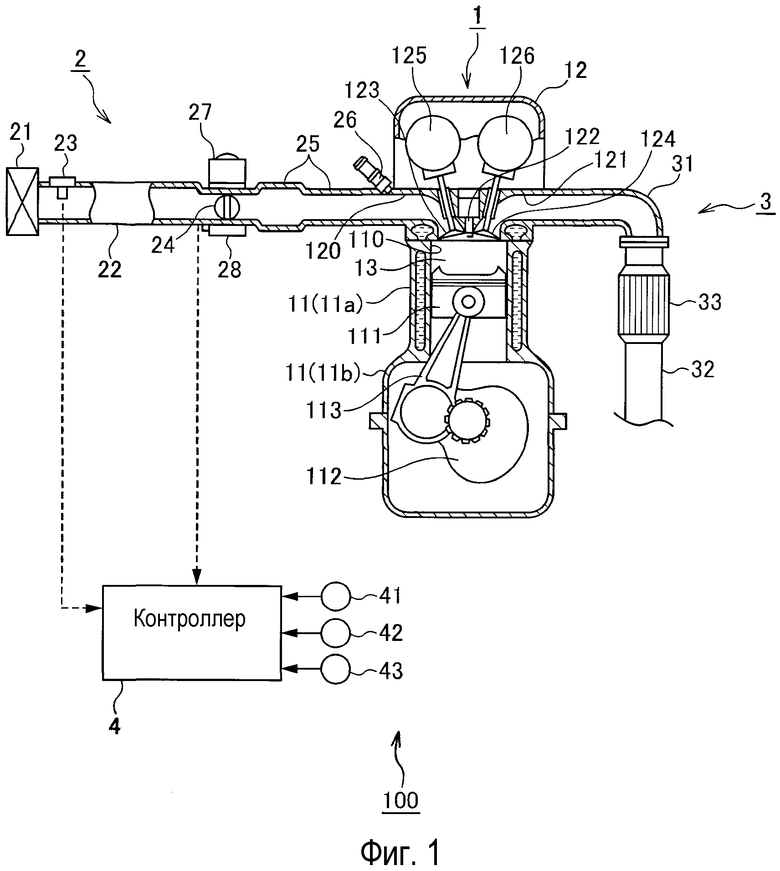
Фиг. 1 является схемой принципиальной конфигурации устройства 100 управления двигателем согласно первому варианту осуществления настоящего изобретения.
Устройство 100 управления двигателем включает в себя двигатель 1, впускное устройство 2, выпускное устройство 3 и контроллер 4.
Двигатель 1 включает в себя блок 11 цилиндров и головку 12 блока цилиндров.
Блок 11 цилиндров включает в себя часть 11a цилиндров и часть 11b картера двигателя.
Часть 11a цилиндров формируется с множеством цилиндров 110. Поршень 111, который совершает возвратно-поступательное движение в цилиндре 110 после приема давления сгорания, размещается в цилиндре 110.
Часть 11b картера двигателя формируется ниже части 11a цилиндров. Часть 11b картера двигателя поддерживает с возможностью вращения коленчатый вал 112. Коленчатый вал 112 преобразует возвратно-поступательные движения поршней 111 во вращательные движения через шатуны 113.
Головка 12 блока цилиндров монтируется на верхней поверхности блока 11 цилиндров и формирует части камер 13 сгорания вместе с цилиндрами 110 и поршнями 111.
Головка 12 блока цилиндров формируется с впускными портами 120, соединенными с впускным устройством 2 и открытыми на верхних стенках камер 13 сгорания, и выпускными портами 121, соединенными с выпускным устройством 3 и открытым на верхних стенках камер 13 сгорания, и свечи 122 зажигания предусмотрены таким образом, что они обращены к центрам верхних стенок камер 13 сгорания. Кроме того, головка 12 блока цилиндров включает в себя впускные клапаны 123 для открытия и закрытия отверстий между камерами 13 сгорания и впускными портами 120 и выпускные клапаны 124 для открытия и закрытия отверстий между камерами 13 сгорания и выпускными портами 121. Кроме того, головка 12 блока цилиндров включает в себя механизмы 125 регулирования впускных клапанов, допускающие приведение в действие с возможностью открывать и закрывать впускные клапаны 123 и задание произвольных времен открытия и закрытия впускных клапанов 123, и механизмы 126 регулирования выпускных клапанов, допускающие приведение в действие с возможностью открывать и закрывать выпускные клапаны 124 и задание произвольных времен открытия и закрытия выпускных клапанов 124.
VVEL (газораспределительный механизм с регулируемыми моментами и высотой подъема), допускающий непрерывное увеличение/уменьшение высоты подъема/рабочего угла впускного клапана 123 и обеспечение непрерывного запаздывания/опережения по центральному углу подъема впускного клапана 123, VTC (управление фазами газораспределения), допускающее обеспечение непрерывного запаздывания/опережения по центральному углу подъема впускного клапана 123, и т.п. могут использоваться в качестве механизма 125 регулирования впускного клапана. Механизм, аналогичный механизму 125 регулирования впускного клапана, может быть использован в качестве механизма 126 регулирования выпускного клапана.
Впускное устройство 2 включает в себя воздушный фильтр 21, впускной канал 22, расходомер 23 воздуха, дроссельный клапан 24 с электронным управлением, впускной коллектор 25 и клапаны 26 впрыска топлива.
Воздушный фильтр 21 удаляет примеси, к примеру, песок, содержащиеся во всасываемом воздухе.
Впускной канал 22 вводит всасываемый воздух, протекающий через воздушный фильтр 21, во впускной коллектор 25.
Расходомер 23 воздуха определяет объем всасываемого воздуха.
Дроссельный клапан 24 регулирует плотность всасываемого воздуха (давление всасываемого воздуха) во впускном коллекторе 25 посредством изменения площади поперечного сечения канала для впускного канала 22. Дроссельный клапан 24 приводится в действие с возможностью открытия и закрытия посредством актуатора дросселя 27, и его открытие (в дальнейшем в этом документе называется «открытием дросселя») определяется посредством датчика 28 позиции дросселя.
Впускной коллектор 25 соединяется с впускными портами 120 двигателя 1 и вводит всасываемый воздух, протекающий через дроссельный клапан 24, равномерно в каждый цилиндр 110.
Клапан 26 впрыска топлива впрыскивает топливо в направлении впускного порта 120 согласно рабочему режиму двигателя 1.
Выпускное устройство 3 включает в себя выпускной коллектор 31, выпускной канал 32 и трехкомпонентный катализатор 33.
Выпускной коллектор 31 выпускает отработанный воздух, выпускаемый из каждого цилиндра 110, в выпускной канал 32 после его сбора.
Выпускной канал 32 выпускает отработанный воздух, выпускаемый из выпускного коллектора 31, в наружную атмосферу через трехкомпонентный катализатор 33 и глушитель (не показан).
Трехкомпонентный катализатор 33 удаляет токсичные вещества, к примеру, углеводород и оксиды азота в отработанном воздухе.
Контроллер 4 конфигурируется посредством микрокомпьютера, включающего в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода-вывода (интерфейс ввода-вывода).
В контроллер 4 вводятся сигналы из различных датчиков для определения рабочего режима транспортного средства, таких как датчик 41 частоты вращения двигателя для определения частоты вращения двигателя на основании угла поворота коленчатого вала, датчика 42 хода педали акселератора для определения величины нажатия педали акселератора в качестве нагрузки на двигатель (в дальнейшем в этом документе называется «рабочей величиной нажатия педали акселератора») и датчик 43 вибрации для определения компонента вибрации (частоты и амплитуды вибрации) для вибрации подрессоренного кузова транспортного средства, к примеру, вибрации в продольном направлении кузова транспортного средства, сформированной во время движения транспортного средства, помимо сигналов определения из расходомера 23 воздуха и датчика 28 позиции дросселя, описанных выше.
Способ для наложения компонента вибрации, допускающий уменьшение вибрации подрессоренного кузова транспортного средства, на крутящий момент двигателя, известен как способ для уменьшения вибрации подрессоренного кузова транспортного средства. В этом способе, крутящий момент, полученный посредством наложения крутящего момента для управления вибрацией для подавления вибрации кузова транспортного средства, вычисленного согласно вибрации подрессоренного кузова транспортного средства, на базовый целевой крутящий момент двигателя, определенный согласно рабочей величине нажатия педали акселератора, вычисляется как конечный целевой крутящий момент двигателя. Затем, целевой объем всасываемого в цилиндры воздуха вычисляется согласно целевому крутящему моменту двигателя, и объем всасываемого в цилиндры воздуха регулируется таким образом, что он достигает целевого объема всасываемого в цилиндры воздуха.
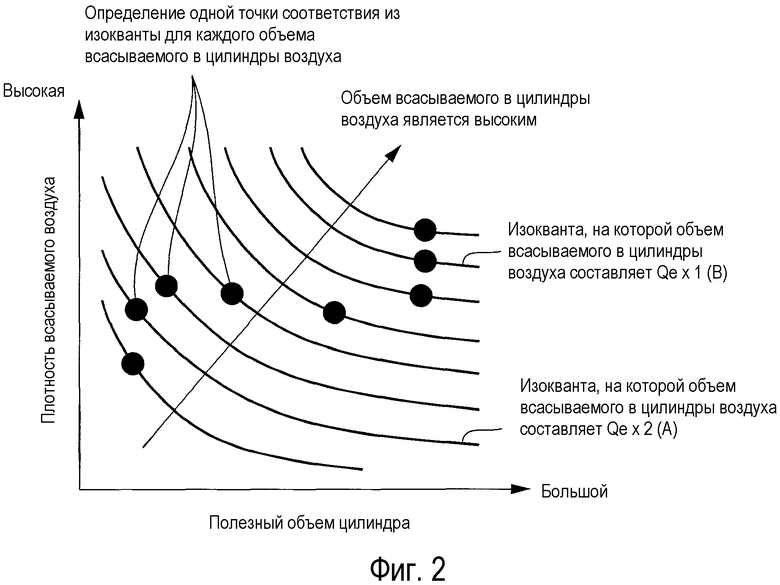
Здесь можно считать, что объем всасываемого в цилиндры воздуха получается посредством умножения плотности всасываемого воздуха (давления всасываемого воздуха) во впускном коллекторе 25, которая изменяется согласно открытию дросселя, на полезный объем цилиндра, который изменяется в зависимости от времени закрытия впускного клапана. Таким образом, в двигателе, включающем в себя механизмы 125 регулирования впускных клапанов, может повышаться экономия топлива и могут улучшаться рабочие характеристики ускорения посредством определения оптимальной плотности всасываемого воздуха (целевого открытия дросселя) и полезного объема цилиндра (целевого времени закрытия впускного клапана) в качестве одной точки соответствия из каждой изокванты заранее для каждого объема всасываемого в цилиндры воздуха посредством эксперимента и т.п., как показано на фиг. 2, с учетом экономии топлива, рабочих характеристик ускорения и т.п.
Фиг. 2 является графиком, показывающим каждую изокванту объема всасываемого в цилиндры воздуха, когда горизонтальная ось представляет полезный объем цилиндра, а вертикальная ось представляет плотность всасываемого воздуха во впускном коллекторе 25.
Например, когда требуется регулировать объем всасываемого в цилиндры воздуха до QeЧ1, т.е. когда целевой объем всасываемого в цилиндры воздуха является небольшим (когда нагрузка на двигатель является низкой), точка, в которой плотность всасываемого воздуха является относительно высокой, на изокванте A, на которой объем всасываемого в цилиндры воздуха составляет QeЧ1, выбирается в качестве одной точки соответствия. Иными словами, давление всасываемого воздуха во впускном коллекторе 25 приближается к атмосферному давлению посредством увеличения открытия дросселя. Поскольку насосные потери, когда нагрузка на двигатель является низкой, могут быть уменьшены таким способом, может повышаться экономия топлива.
С другой стороны, когда требуется регулировать объем всасываемого в цилиндры воздуха до QeЧ2, т.е. когда целевой объем всасываемого в цилиндры воздуха является большим (когда нагрузка на двигатель является высокой), точка, в которой полезный объем цилиндра является относительно большим, на изокванте B, на которой объем всасываемого в цилиндры воздуха составляет QeЧ2, выбирается в качестве одной точки соответствия. Поскольку таким способом может повышаться эффективность заряда, когда нагрузка на двигатель является высокой, могут улучшаться рабочие характеристики ускорения.
Тем не менее, обнаружено, что возникает проблема неспособности получать требуемое преимущество от управления вибрацией, если целевой объем всасываемого в цилиндры воздуха вычислен на основании целевого крутящего момента двигателя, полученного посредством наложения крутящего момента для управления вибрацией на базовый целевой крутящий момент двигателя, чтобы уменьшать вибрацию подрессоренного кузова транспортного средства, и выполнено управление таким образом, чтобы достигать плотности всасываемого воздуха и полезного объема цилиндра, определенных в качестве одной точки соответствия заранее, с тем чтобы достигать целевого объема всасываемого в цилиндры воздуха.
Фиг. 13 являются схемами, показывающими эту проблему.
Крутящий момент для управления вибрацией для подавления вибрации кузова транспортного средства, вычисленный согласно вибрации подрессоренного кузова транспортного средства, периодически увеличивается и уменьшается, поскольку он компенсирует вибрации подрессоренного кузова транспортного средства. Таким образом, целевой крутящий момент двигателя, полученный посредством суммирования крутящего момента для управления вибрацией с базовым целевым крутящим моментом двигателя, также периодически увеличивается и уменьшается. Как результат, как показано на фиг. 13(A), целевой объем всасываемого в цилиндры воздуха, вычисленный согласно целевому крутящему моменту двигателя, также периодически увеличивается и уменьшается.
Затем, если целевой полезный объем цилиндра и целевая плотность всасываемого воздуха задаются из карты, показанной на фиг. 2, на основании этого целевого объема всасываемого в цилиндры воздуха, целевой полезный объем цилиндра и целевой плотности всасываемого воздуха, соответственно, периодически увеличиваются и уменьшаются, как показано на фиг. 13(B) и 13(C). Иными словами, компонент вибрации для уменьшения вибрации подрессоренного кузова транспортного средства накладывается на каждое из целевого полезного объема цилиндра и целевой плотности всасываемого воздуха.
Здесь полезный объем цилиндра изменяется одновременно с тем, как изменяется время закрытия впускного клапана посредством механизма 125 регулирования впускного клапана. Таким образом, как показано на фиг. 13(B), фактический полезный объем цилиндра изменяется на целевой полезный объем цилиндра одновременно с тем, как механизм 125 регулирования впускного клапана управляется таким образом, что полезный объем цилиндра достигает целевого полезного объема цилиндра.
С другой стороны, плотность всасываемого воздуха во впускном коллекторе 25 изменяется с заданной задержкой реакции после того, как изменяется открытие дросселя. Таким образом, как показано на фиг. 13(C), фактическая плотность всасываемого воздуха изменяется на целевую плотность всасываемого воздуха после истечения заданного времени после того, как дроссельный клапан 24 управляется таким образом, что плотность всасываемого воздуха достигает целевой плотности всасываемого воздуха.
Как описано выше, поскольку имеется разность между темпами изменения полезного объема цилиндра и плотности всасываемого воздуха, варьирование фактического объема всасываемого в цилиндры воздуха превышает варьирование целевого объема всасываемого в цилиндры воздуха, как показано на фиг. 13(D), если компонент вибрации для уменьшения вибрации подрессоренного кузова транспортного средства накладывается на каждое из целевого полезного объема цилиндра и целевой плотности всасываемого воздуха. Как результат, фактическое варьирование крутящего момента двигателя становится больше целевого варьирования крутящего момента двигателя, т.е. варьирования крутящего момента двигателя, допускающего получение преимущества от управления вибрацией, в силу чего не может получаться требуемое преимущество от управления вибрацией.
Соответственно, в настоящем варианте осуществления, периодически увеличивается и уменьшается только либо только полезный объем цилиндра, либо только плотность всасываемого воздуха. Иными словами, компонент вибрации для уменьшения вибрации подрессоренного кузова транспортного средства накладывается либо только на целевой полезный объем цилиндра, либо только на целевую плотность всасываемого воздуха. Ниже описано управление двигателем для подавления вибрации кузова транспортного средства согласно настоящему варианту осуществления.
Фиг. 3 является блок-схемой, показывающей управление двигателем для подавления вибрации кузова транспортного средства согласно настоящему варианту осуществления.
На этапе S1 контроллер 4 считывает значения определения различных датчиков, описанных выше.
На этапе S2 контроллер 4 вычисляет базовый целевой крутящий момент двигателя на основании рабочей величины нажатия педали акселератора. Базовый целевой крутящий момент двигателя увеличивается с увеличением рабочей величины нажатия педали акселератора.
На этапе S3 контроллер 4 вычисляет крутящий момент для управления вибрацией, имеющий компонент вибрации (частоту и амплитуду вибрации), допускающий компенсацию вибрации подрессоренного кузова транспортного средства, на основании вибрации подрессоренного кузова транспортного средства. Крутящий момент для управления вибрацией ассоциирован с периодическим изменением.
На этапе S4 контроллер 4 вычисляет целевой крутящий момент двигателя для управления вибрацией посредством суммирования крутящего момента для управления вибрацией с базовым целевым крутящим моментом двигателя.
На этапе S5 контроллер 4 вычисляет базовый целевой объем всасываемого в цилиндры воздуха на основании базового целевого крутящего момента двигателя. Базовый целевой объем всасываемого в цилиндры воздуха представляет собой объем всасываемого в цилиндры воздуха, необходимый для достижения посредством крутящего момента двигателя базового целевого крутящего момента двигателя.
На этапе S6 контроллер 4 вычисляет целевой объем всасываемого в цилиндры воздуха для управления вибрацией на основании целевого крутящего момента двигателя для управления вибрацией. Целевой объем всасываемого в цилиндры воздуха для управления вибрацией представляет собой объем всасываемого в цилиндры воздуха, необходимый для достижения посредством крутящего момента двигателя базового целевого крутящего момента двигателя.
На этапе S7 контроллер 4 обращается к карте, определенной заранее посредством эксперимента и т.п., и вычисляет частоту fair задержки реакции на впуске согласно частоте вращения двигателя и рабочей скорости нажатия педали акселератора (нагрузке на двигатель). Здесь, частота fair задержки реакции на впуске является значением, заданным посредством следующего уравнения (1), когда T обозначает постоянную времени задержки реакции на изменение плотности всасываемого воздуха, когда изменяется открытие дросселя.
fair=1/T…(1)
На этапе S8 контроллер 4 определяет то, ниже или нет частота fbody вибрации подрессоренного кузова транспортного средства частоты fair задержки реакции на впуске. Контроллер 4 выполняет обработки этапа S9 и следующих этапов для наложения компонента вибрации только на плотность всасываемого воздуха, если частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске. С другой стороны, обработки этапа S11 и следующих этапов выполняются для наложения компонента вибрации только на полезный объем цилиндра, если частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске.
Следует отметить, что наложение компонента вибрации переключается между плотностью всасываемого воздуха и полезным объемом цилиндра согласно частоте fbody вибрации подрессоренного кузова транспортного средства по следующей причине.
Хотя полезный объем цилиндра не изменяется, даже если изменяется плотность всасываемого воздуха, плотность всасываемого воздуха изменяется, хотя и только в небольшой степени, если изменяется полезный объем цилиндра.
Здесь, если частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, частота крутящего момента для управления вибрацией для уменьшения вибрации подрессоренного кузова транспортного средства становится относительно высокой, и крутящий момент для управления вибрацией периодически и быстро варьируется. Таким образом, даже если полезный объем цилиндра периодически варьируется посредством наложения компонента вибрации на полезный объем цилиндра, полезный объем цилиндра периодически и быстро варьируется перед тем, как изменяется плотность всасываемого воздуха в ответ на изменение полезного объема цилиндра, в силу чего практически не варьируется плотность всасываемого воздуха.
Кроме того, поскольку крутящий момент для управления вибрацией периодически и быстро варьируется, сформированная вибрация подрессоренного кузова транспортного средства может быстрее уменьшаться посредством наложения компонента вибрации на полезный объем цилиндра, который варьируется без задержки реакции, чем посредством наложения компонента вибрации на плотность всасываемого воздуха, которая варьируется с заданной задержкой реакции.
С другой стороны, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске, частота крутящего момента для управления вибрацией для уменьшения вибрации подрессоренного кузова транспортного средства становится относительно низкой, и периодическое изменение крутящего момента для управления вибрацией становится умеренным. Таким образом, если компонент вибрации накладывается на полезный объем цилиндра, периодическое изменение полезного объема цилиндра также становится умеренным. Таким образом, когда периодически варьируется объем цилиндра, плотность всасываемого воздуха также изменяется в ответ на изменение полезного объема цилиндра. Затем, плотность всасываемого воздуха периодически варьируется по мере того, как периодически варьируется полезный объем цилиндра, в силу чего периодически варьируются как полезный объем цилиндра, так и плотность всасываемого воздуха. Как результат, не может получаться требуемое варьирование крутящего момента двигателя, и не может получаться требуемое преимущество от управления вибрацией.
Соответственно, компонент вибрации накладывается на полезный объем цилиндра, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, при наложении на плотность всасываемого воздуха, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске.
На этапе S9 контроллер 4 обращается к таблице фиг. 4 и вычисляет целевой полезный объем цилиндра на основании базового целевого объема всасываемого в цилиндры воздуха. Таблица фиг. 4 представляет собой таблицу, полученную посредством иллюстрации полезного объема цилиндра, определенного в качестве одной точки соответствия для каждого объема всасываемого в цилиндры воздуха, описанного в отношении карты фиг. 2, причем объем всасываемого в цилиндры воздуха выступает в качестве горизонтальной оси.
На этапе S10 контроллер 4 обращается к таблице фиг. 5 и вычисляет целевую плотность всасываемого воздуха на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Таблица фиг. 5 представляет собой таблицу, полученную посредством иллюстрации плотности всасываемого воздуха, определенной в качестве одной точки соответствия для каждого объема всасываемого в цилиндры воздуха, описанного в отношении карты фиг. 2, причем объем всасываемого в цилиндры воздуха выступает в качестве горизонтальной оси.
На этапе S11 контроллер 4 обращается к таблице фиг. 5 и вычисляет целевую плотность всасываемого воздуха на основании базового целевого объема всасываемого в цилиндры воздуха.
На этапе S12 контроллер 4 обращается к таблице фиг. 4 и вычисляет целевой полезный объем цилиндра на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией.
На этапе S13 контроллер 4 обращается к таблице фиг. 6 и вычисляет целевое время закрытия впускного клапана на основании целевого полезного объема цилиндра. Затем, механизм 125 регулирования впускного клапана управляется таким образом, что время закрытия впускного клапана достигает целевого времени закрытия впускного клапана.
На этапе S14 контроллер 4 обращается к таблице фиг. 7 и вычисляет целевое открытие дросселя на основании целевой плотности всасываемого воздуха. Затем, дроссельный клапан 24 управляется таким образом, что открытие дросселя достигает целевого открытия дросселя.
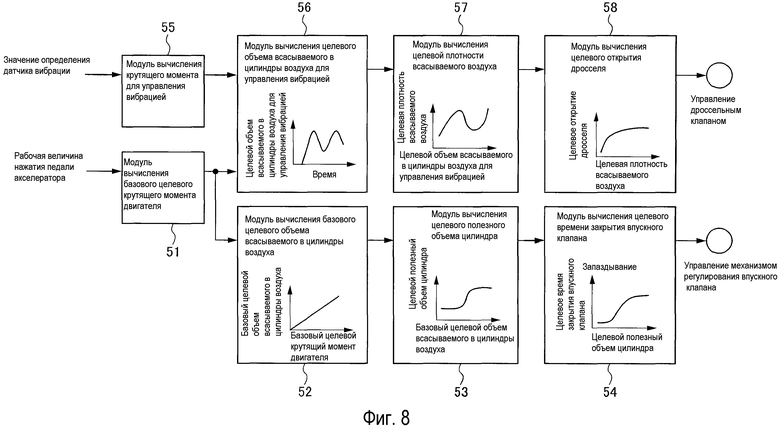
Фиг. 8 является блок-схемой, показывающей содержимое управления двигателем для подавления вибрации кузова транспортного средства, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске.
Рабочая величина нажатия педали акселератора, определенная посредством датчика хода педали акселератора, вводится в модуль 51 вычисления базового целевого крутящего момента двигателя. Модуль 51 вычисления базового целевого крутящего момента двигателя вычисляет базовый целевой крутящий момент двигателя на основании рабочей величины нажатия педали акселератора.
Базовый целевой крутящий момент двигателя вводится в модуль 52 вычисления базового целевого объема всасываемого в цилиндры воздуха. Модуль 52 вычисления базового целевого объема всасываемого в цилиндры воздуха вычисляет базовый целевой объем всасываемого в цилиндры воздуха на основе базового целевого крутящего момента двигателя.
Базовый целевой объем всасываемого в цилиндры воздуха вводится в модуль 53 вычисления целевого полезного объема цилиндра. Модуль 53 вычисления целевого полезного объема цилиндра вычисляет целевой полезный объем цилиндра на основании базового целевого объема всасываемого в цилиндры воздуха.
Целевой полезный объем цилиндра вводится в модуль 54 вычисления целевого времени закрытия впускного клапана. Модуль 54 вычисления целевого времени закрытия впускного клапана вычисляет целевое время закрытия впускного клапана на основании целевого полезного объема цилиндра. Затем, механизм 125 регулирования впускного клапана управляется таким образом, что время закрытия впускного клапана достигает этого целевого времени закрытия впускного клапана.
Компонент вибрации (частота и амплитуда) для вибрации подрессоренного кузова транспортного средства, определенной посредством датчика 43 вибрации, вводится в модуль 55 вычисления крутящего момента для управления вибрацией. Модуль 55 вычисления крутящего момента для управления вибрацией вычисляет крутящий момент для управления вибрацией, который должен накладываться на базовый целевой крутящий момент двигателя, на основании компонента вибрации для вибрации подрессоренного кузова транспортного средства.
Базовый целевой крутящий момент двигателя и крутящий момент для управления вибрацией вводятся в модуль 56 вычисления целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Модуль 56 вычисления целевого объема всасываемого в цилиндры воздуха для управления вибрацией вычисляет целевой объем всасываемого в цилиндры воздуха для управления вибрацией на основании целевого крутящего момента двигателя для управления вибрацией, полученного посредством наложения крутящего момента для управления вибрацией на базовый целевой крутящий момент двигателя.
Целевой объем всасываемого в цилиндры воздуха для управления вибрацией вводится в модуль 57 вычисления целевой плотности всасываемого воздуха. Модуль 57 вычисления целевой плотности всасываемого воздуха вычисляет целевую плотность всасываемого воздуха на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией.
Целевая плотность всасываемого воздуха вводится в модуль 58 вычисления целевого открытия дросселя. Модуль 58 вычисления целевого открытия дросселя вычисляет целевое открытие дросселя на основании целевой плотности всасываемого воздуха. Затем, дроссельный клапан 24 управляется таким образом, что открытие дросселя достигает этого целевого открытия дросселя.
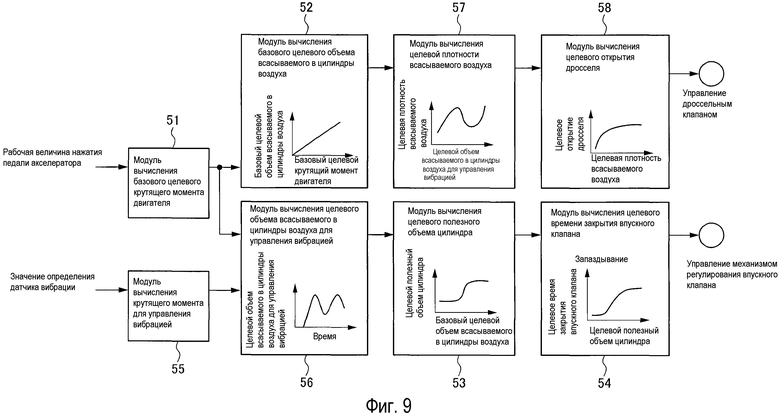
Фиг. 9 является блок-схемой, показывающей содержимое управления двигателем для подавления вибрации кузова транспортного средства, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске.
Как показано на фиг. 9, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, целевой объем всасываемого в цилиндры воздуха для управления вибрацией вводится в модуль 53 вычисления целевого полезного объема цилиндра, и целевой полезный объем цилиндра вычисляется на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Затем, базовый целевой объем всасываемого в цилиндры воздуха вводится в модуль 57 вычисления целевой плотности всасываемого воздуха, и целевая плотность всасываемого воздуха вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха.
Фиг. 10 являются временными диаграммами, показывающими операцию управления двигателем для подавления вибрации кузова транспортного средства, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске в установившемся режиме, в котором рабочая величина нажатия педали акселератора является постоянной.
Когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске, полезный объем цилиндра управляется таким образом, чтобы достигать целевого полезного объема цилиндра, вычисленного на основании базового целевого объема всасываемого в цилиндры воздуха. Базовый целевой объем всасываемого в цилиндры воздуха является значением, которое изменяется согласно рабочей величине нажатия педали акселератора. Соответственно, как показано на фиг. 10(A), базовый целевой объем всасываемого в цилиндры воздуха также является постоянным, и целевой полезный объем цилиндра, вычисленный на основании базового целевого объема всасываемого в цилиндры воздуха, также является постоянным в установившемся режиме, в котором рабочая величина нажатия педали акселератора является постоянной.
С другой стороны, плотность всасываемого воздуха управляется таким образом, чтобы достигать целевой плотности всасываемого воздуха, вычисленной на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Целевой объем всасываемого в цилиндры воздуха для управления вибрацией вычисляется на основании целевого крутящего момента двигателя для управления вибрацией, полученного посредством наложения крутящего момента для управления вибрацией, который периодически варьируется, в качестве компонента вибрации для уменьшения вибрации подрессоренного кузова транспортного средства, на базовый целевой крутящий момент двигателя. Таким образом, как показано на фиг. 10(B), целевая плотность всасываемого воздуха, вычисленная на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, также периодически варьируется, и фактическая плотность всасываемого воздуха периодически варьируется с заданной задержкой реакции относительно целевой плотности всасываемого воздуха.
Как описано выше, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске, целевой полезный объем цилиндра вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха, и целевая плотность всасываемого воздуха вычисляется на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Таким образом, только плотность всасываемого воздуха может периодически варьироваться, в то время как полезный объем цилиндра продолжает управляться таким образом, что он является постоянным.
Таким образом, как показано на фиг. 10(C), варьирование фактического объема всасываемого в цилиндры воздуха, полученного посредством умножения фактической плотности всасываемого воздуха на фактический полезный объем цилиндра, не становится больше варьирования целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Следовательно, может получаться требуемое варьирование крутящего момента двигателя, и может получаться требуемое преимущество от управления вибрацией.
Кроме того, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске, только плотность всасываемого воздуха периодически варьируется, за счет этого не допуская периодического варьирования плотности всасываемого воздуха по мере того, как периодически варьируется полезный объем цилиндра, и следовательно, не допуская периодического варьирования как полезного объема цилиндра, так и плотности всасываемого воздуха. Таким образом, может более надежно получаться требуемое преимущество от управления вибрацией.
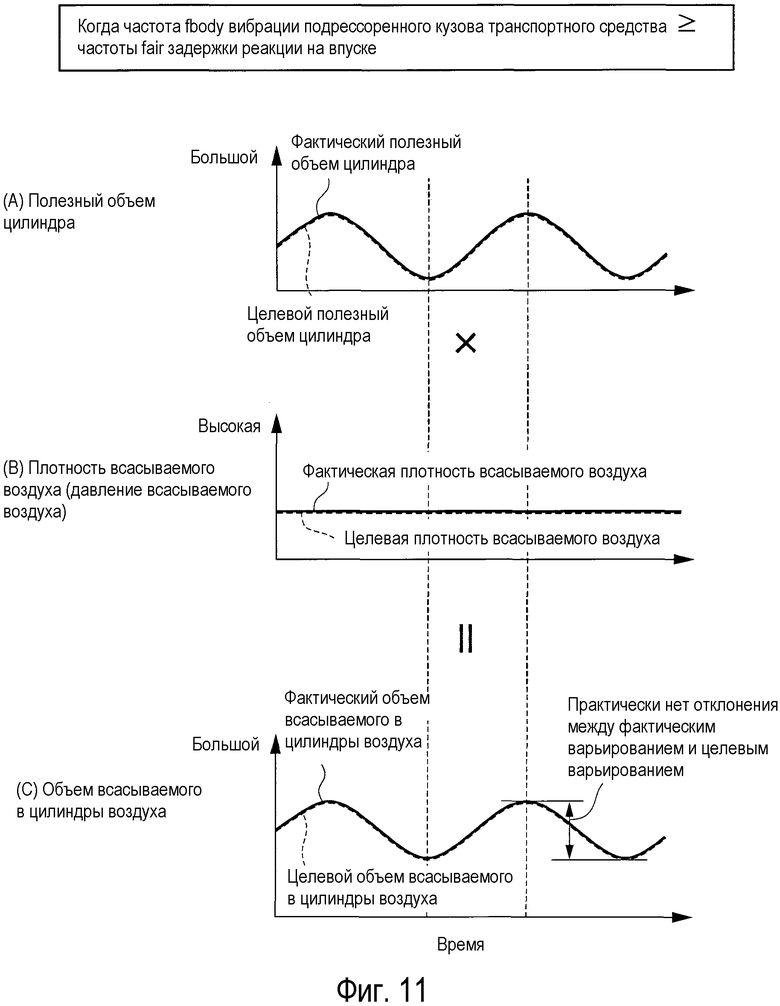
Фиг. 11 являются временными диаграммами, показывающими операцию управления двигателем для подавления вибрации кузова транспортного средства, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске в установившемся режиме, в котором рабочая величина нажатия педали акселератора является постоянной.
Когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, полезный объем цилиндра управляется таким образом, чтобы достигать целевого полезного объема цилиндра, вычисленного на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Таким образом, как показано на фиг. 11(A), целевой полезный объем цилиндра периодически варьируется, и ассоциированный с ним фактический полезный объем цилиндра периодически варьируется практически без задержки.
С другой стороны, плотность всасываемого воздуха управляется таким образом, чтобы достигать целевой плотности всасываемого воздуха, вычисленной на основании базового целевого объема всасываемого в цилиндры воздуха. Таким образом, как показано на фиг. 11(B), целевая плотность всасываемого воздуха и фактическая плотность всасываемого воздуха являются постоянными в установившемся режиме, в котором рабочая величина нажатия педали акселератора является постоянной.
Как описано выше, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, целевая плотность всасываемого воздуха вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха, и целевой полезный объем цилиндра вычисляется на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Таким образом, только полезный объем цилиндра может периодически варьироваться, в то время как плотность всасываемого воздуха продолжает управляться таким образом, что она является постоянной.
Таким образом, как показано на фиг. 11(C), варьирование фактического объема всасываемого в цилиндры воздуха, полученного посредством умножения фактической плотности всасываемого воздуха на фактический полезный объем цилиндра, не становится больше варьирования целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Следовательно, может получаться требуемое варьирование крутящего момента двигателя, и может получаться требуемое преимущество от управления вибрацией.
Кроме того, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, целевой объем всасываемого в цилиндры воздуха для управления вибрацией периодически и быстро варьируется. Сформированная вибрация подрессоренного кузова транспортного средства может быть быстро уменьшена посредством наложения компонента вибрации только на полезный объем цилиндра, который варьируется без задержки реакции.
Второй вариант осуществления
Далее описан второй вариант осуществления настоящего изобретения со ссылкой на фиг. 12. Настоящий вариант осуществления отличается от первого варианта осуществления тем, что целевой объем цилиндра или целевая плотность всасываемого воздуха вычисляется на основании скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Нижеприведенное описание приводится с фокусировкой на этой точке расхождения. Следует отметить, что элементы, осуществляющие функции, аналогичные функциям первого варианта осуществления, описанного выше, обозначены одинаковыми ссылочными позициями и не описываются повторно в каждом следующем варианте осуществления.
Аналогично первому варианту осуществления, только плотность всасываемого воздуха периодически варьируется, например, когда целевой объем цилиндра вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха, и целевая плотность всасываемого воздуха вычисляется на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией. Таким образом, может подавляться возникновение отклонения между фактическим варьированием крутящего момента двигателя и целевым варьированием крутящего момента двигателя вследствие задержки реакции для плотности всасываемого воздуха.
Тем не менее, объем всасываемого в цилиндры воздуха (оцененный объем всасываемого в цилиндры воздуха), полученный посредством умножения целевого объема цилиндра, вычисленного на основании базового целевого объема всасываемого в цилиндры воздуха, и целевой плотности всасываемого воздуха, вычисленной на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, не является целевым объемом всасываемого в цилиндры воздуха для управления вибрацией. Таким образом, имеется незначительное отклонение между фактическим варьированием крутящего момента двигателя и целевым варьированием крутящего момента двигателя, хотя это отклонение не такое большое, как отклонение, которое возникает вследствие задержки реакции для плотности всасываемого воздуха.
Соответственно, в настоящем варианте осуществления, целевой объем цилиндра или целевая плотность всасываемого воздуха корректируется на основании скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией таким образом, чтобы не вызывать такое отклонение. Ниже описано управление двигателем для подавления вибрации кузова транспортного средства согласно этому варианту осуществления.
Фиг. 12 является блок-схемой, показывающей управление двигателем для подавления вибрации кузова транспортного средства согласно настоящему варианту осуществления.
На этапе S21, контроллер 4 обращается к карте по фиг. 2 и вычисляет целевой полезный объем цилиндра для управления вибрацией и целевую плотность всасываемого воздуха управления вибрацией, определенные в качестве одной точки соответствия, заранее на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией.
На этапе S22, контроллер 4 вычисляет разность (далее в данном документе называется «первым дифференциальным объемом всасываемого воздуха») между объемом всасываемого в цилиндры воздуха (оцененным объемом всасываемого в цилиндры воздуха), полученным посредством умножения целевого полезного объема цилиндра на целевую плотность всасываемого воздуха управления вибрацией, и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией. Первый дифференциальный объем всасываемого воздуха является величиной отклонения объема всасываемого воздуха между фактическим объемом всасываемого в цилиндры воздуха и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией, вызываемой посредством вычисления целевого полезного объема цилиндра не на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, но на основании базового целевого объема всасываемого в цилиндры воздуха.
На этапе S23, контроллер 4 вычисляет целевую плотность всасываемого воздуха на основании первого скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования первого дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
На этапе S24, контроллер 4 вычисляет разность (далее в этом документе называется «вторым дифференциальным объемом всасываемого воздуха») между объемом всасываемого в цилиндры воздуха (оцененным объемом всасываемого в цилиндры воздуха), полученным посредством умножения целевой плотности всасываемого воздуха на целевой полезный объем цилиндра для управления вибрацией, и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией. Второй дифференциальный объем всасываемого воздуха является величиной отклонения объема всасываемого воздуха между фактическим объемом всасываемого в цилиндры воздуха и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией, вызываемой посредством вычисления целевой плотности всасываемого воздуха не на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, а на основании базового целевого объема всасываемого в цилиндры воздуха.
На этапе S25, контроллер 4 вычисляет целевой полезный объем цилиндра на основании второго скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования второго дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
Как описано выше, когда частота fbody вибрации подрессоренного кузова транспортного средства ниже частоты fair задержки реакции на впуске, целевой полезный объем цилиндра вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха, и целевая плотность всасываемого воздуха вычисляется на основании первого скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования первого дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
Как описано выше, первый дифференциальный объем всасываемого воздуха является величиной отклонения объема всасываемого воздуха между фактическим объемом всасываемого в цилиндры воздуха и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией, вызываемой посредством вычисления целевого полезного объема цилиндра не на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, а на основании базового целевого объема всасываемого в цилиндры воздуха.
Соответственно, эта величина отклонения может исключаться посредством вычисления целевой плотности всасываемого воздуха на основании первого скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования первого дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
Кроме того, когда частота fbody вибрации подрессоренного кузова транспортного средства не ниже частоты fair задержки реакции на впуске, целевая плотность всасываемого воздуха вычисляется на основании базового целевого объема всасываемого в цилиндры воздуха, и целевой полезный объем цилиндра вычисляется на основании второго скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования второго дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
Как описано выше, второй дифференциальный объем всасываемого в цилиндры воздуха является величиной отклонения объема всасываемого воздуха между фактическим объемом всасываемого в цилиндры воздуха и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией, вызываемой посредством вычисления целевой плотности всасываемого воздуха не на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, а на основании базового целевого объема всасываемого в цилиндры воздуха.
Таким образом, эта величина отклонения может исключаться посредством вычисления целевого полезного объема цилиндра на основании второго скорректированного целевого объема всасываемого в цилиндры воздуха для управления вибрацией, полученного посредством суммирования второго дифференциального объема всасываемого воздуха с целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
Посредством вышеуказанного, согласно настоящему варианту осуществления, фактическое варьирование крутящего момента двигателя может быть приближено к целевому варьированию крутящего момента двигателя, помимо получения преимуществ, аналогичных преимуществам первого варианта осуществления. Таким образом, по сравнению с первым вариантом осуществления, может дополнительно уменьшаться вибрация кузова транспортного средства.
Хотя выше описаны варианты осуществления настоящего изобретения, вышеописанные варианты осуществления представляют собой просто иллюстрацию некоторых примеров вариантов применения настоящего изобретения и не имеют цели ограничивать объем настоящего изобретения конкретными конфигурациями вышеописанных вариантов осуществления.
Хотя компонент вибрации для вибрации подрессоренного кузова транспортного средства определяется посредством датчика 43 вибрации в вышеописанных вариантах осуществления, внешнее возмущение в продольном направлении, действующее на колеса вследствие изменения каждой скорости вращения колес, может быть, например, вычислено на основании скорости вращения колес для каждого колеса, определенной посредством датчика скорости вращения колес, и компонент вибрации для вибрации подрессоренного кузова транспортного средства может быть оценен согласно этому внешнему возмущению в продольном направлении.
Кроме того, хотя частота fair задержки реакции на впуске вычисляется согласно рабочему режиму двигателя в вышеописанных вариантах осуществления, компонент транспортного средства может накладываться только на полезный объем цилиндра заранее без вычисления частоты fair задержки реакции на впуске независимо от рабочего режима двигателя 1, к примеру, когда частота fair задержки реакции на впуске существенно выше частоты fbody вибрации подрессоренного кузова транспортного средства.
Кроме того, хотя целевое открытие дросселя и целевая плотность всасываемого воздуха вычисляются на основании базового целевого объема всасываемого в цилиндры воздуха и целевого объема всасываемого в цилиндры воздуха для управления вибрацией в вышеописанных вариантах осуществления, целевое открытие дросселя и целевая плотность всасываемого воздуха могут быть непосредственно вычислены из базового целевого крутящего момента двигателя и целевого крутящего момента двигателя для управления вибрацией.
Кроме того, типичные аспекты настоящего изобретения, отличающиеся от аспектов, заявленных в формуле изобретения, заключаются в следующем.
(1) Устройство управления для двигателя внутреннего сгорания, установленного на транспортном средстве, включает в себя устройство управления плотностью всасываемого воздуха для управления плотностью всасываемого воздуха во впускном коллекторе двигателя внутреннего сгорания, устройство управления полезным объемом цилиндра для управления полезным объемом цилиндра двигателя внутреннего сгорания, средство вычисления базового целевого крутящего момента для вычисления базового целевого крутящего момента двигателя внутреннего сгорания согласно рабочему режиму двигателя внутреннего сгорания, средство определения компонента вибрации для определения компонента вибрации транспортного средства, средство вычисления целевого крутящего момента для управления вибрацией для вычисления целевого крутящего момента для управления вибрацией двигателя внутреннего сгорания таким образом, чтобы подавлять вибрацию транспортного средства, и средство управления объемом всасываемого в цилиндры воздуха для управления объемом всасываемого в цилиндры воздуха посредством управления одним из устройства управления плотностью всасываемого воздуха и устройства управления полезным объемом цилиндра согласно целевому крутящему моменту для управления вибрацией и управления другим из устройства управления плотностью всасываемого воздуха и устройства управления полезным объемом цилиндра согласно базовому целевому крутящему моменту.
(2) Устройство управления для двигателя внутреннего сгорания, описанное в вышеуказанном пункте (1), в котором средство управления объемом всасываемого в цилиндры воздуха, включает в себя средство для вычисления базового целевого объема всасываемого в цилиндры воздуха на основании базового целевого крутящего момента, средство для вычисления целевого объема всасываемого в цилиндры воздуха для управления вибрацией на основании целевого крутящего момента для управления вибрацией, и средство для вычисления целевого значения управления одного из устройства управления плотностью всасываемого воздуха и устройства управления полезным объемом цилиндра на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией и вычисления целевого значения управления другого из устройства управления плотностью всасываемого воздуха и устройства управления полезным объемом цилиндра на основании базового целевого объема всасываемого в цилиндры воздуха.
(3) Устройство управления для двигателя внутреннего сгорания, описанное в вышеуказанном пункте (2), включает в себя средство коррекции целевых значений управления для коррекции одного целевого значения управления, вычисленного на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, на основании дифференциального объема всасываемого воздуха между оцененным объемом всасываемого в цилиндры воздуха, полученным, когда устройство управления плотностью всасываемого воздуха и устройство управления полезным объемом цилиндра, соответственно, управляются таким образом, чтобы достигать целевых значений управления, и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
(4) Устройство управления для двигателя внутреннего сгорания, описанное в любом из вышеуказанных пунктов (1)-(3), в котором средство управления объемом всасываемого в цилиндры воздуха определяет, какое из устройства управления плотностью всасываемого воздуха и устройства управления полезным объемом цилиндра должно управляться согласно целевому крутящему моменту для управления вибрацией, на основании компонента вибрации транспортного средства и характеристики реакции для плотности всасываемого воздуха во впускном коллекторе.
(5) Устройство управления для двигателя внутреннего сгорания, описанное в вышеуказанном пункте (4), в котором средство управления объемом всасываемого в цилиндры воздуха управляет устройством управления плотностью всасываемого воздуха согласно целевому крутящему моменту для управления вибрацией и управляет устройством управления полезным объемом цилиндра согласно базовому целевому крутящему моменту, когда частота вибрации для вибрации транспортного средства в качестве компонента вибрации транспортного средства ниже частоты задержки реакции на впуске, выражаемой посредством обратной величины постоянной времени задержки реакции для плотности всасываемого воздуха во впускном коллекторе.
(6) Устройство управления для двигателя внутреннего сгорания, описанное в вышеуказанном пункте (4), в котором средство управления объемом всасываемого в цилиндры воздуха управляет устройством управления полезным объемом цилиндра согласно целевому крутящему моменту для управления вибрацией и управляет устройством управления плотностью всасываемого воздуха согласно базовому целевому крутящему моменту, когда частота вибрации для вибрации транспортного средства в качестве компонента вибрации транспортного средства не ниже частоты задержки реакции на впуске, выражаемой посредством обратной величины постоянной времени задержки реакции для плотности всасываемого воздуха во впускном коллекторе.
(7) Устройство управления для двигателя внутреннего сгорания, описанное в любом из вышеуказанных пунктов (1)-(6), в котором средство вычисления целевого крутящего момента для управления вибрацией вычисляет крутящий момент для управления вибрацией, имеющий компонент вибрации для компенсации компонента вибрации транспортного средства, на основании компонента вибрации транспортного средства, и вычисляет целевой крутящий момент для управления вибрацией посредством наложения крутящего момента для управления вибрацией на базовый целевой крутящий момент.
(8) Устройство управления для двигателя внутреннего сгорания, описанное в любом из вышеуказанных пунктов (1)-(7), в котором устройство управления плотностью всасываемого воздуха представляет собой дроссельный клапан, а устройство управления полезным объемом цилиндра представляет собой механизм регулируемого клапана для впускного клапана.
По настоящей заявке испрашивается приоритет на основании заявки на патент Японии № 2012-135165, поданной в патентное бюро Японии 14 июня 2012 г., содержимое которой в полном объеме включено в данный документ путем ссылки.


Изобретение относится к устройствам управления двигателем внутреннего сгорания. Технический результат - подавление вибраций транспортных средств. Устройство управления для двигателя внутреннего сгорания, установленного на транспортном средстве, причем устройство управления содержит: дроссельный клапан, предусмотренный во впускном канале двигателя внутреннего сгорания и допускающий изменение площади поперечного сечения канала для всасываемого воздуха; регулируемый клапан, допускающий изменение времени открытия/закрытия впускного клапана двигателя внутреннего сгорания; средство вычисления базового целевого крутящего момента, которое вычисляет базовый целевой крутящий момент двигателя внутреннего сгорания в соответствии с рабочим режимом двигателя внутреннего сгорания; средство вычисления целевого крутящего момента для подавления вибрации, которое вычисляет целевой крутящий момент для подавления вибрации двигателя внутреннего сгорания в соответствии с компонентом вибрации транспортного средства в целях подавления вибрации транспортного средства и средство управления объемом всасываемого в цилиндры воздуха, которое управляет объемом всасываемого в цилиндры воздуха посредством управления либо дроссельным клапаном, либо регулируемым клапаном в соответствии с целевым крутящим моментом для подавления вибрации и управления другим клапаном, т.е. регулируемым клапаном или дроссельным клапаном, в соответствии с базовым целевым крутящим моментом. 6 з.п. ф-лы, 13 ил.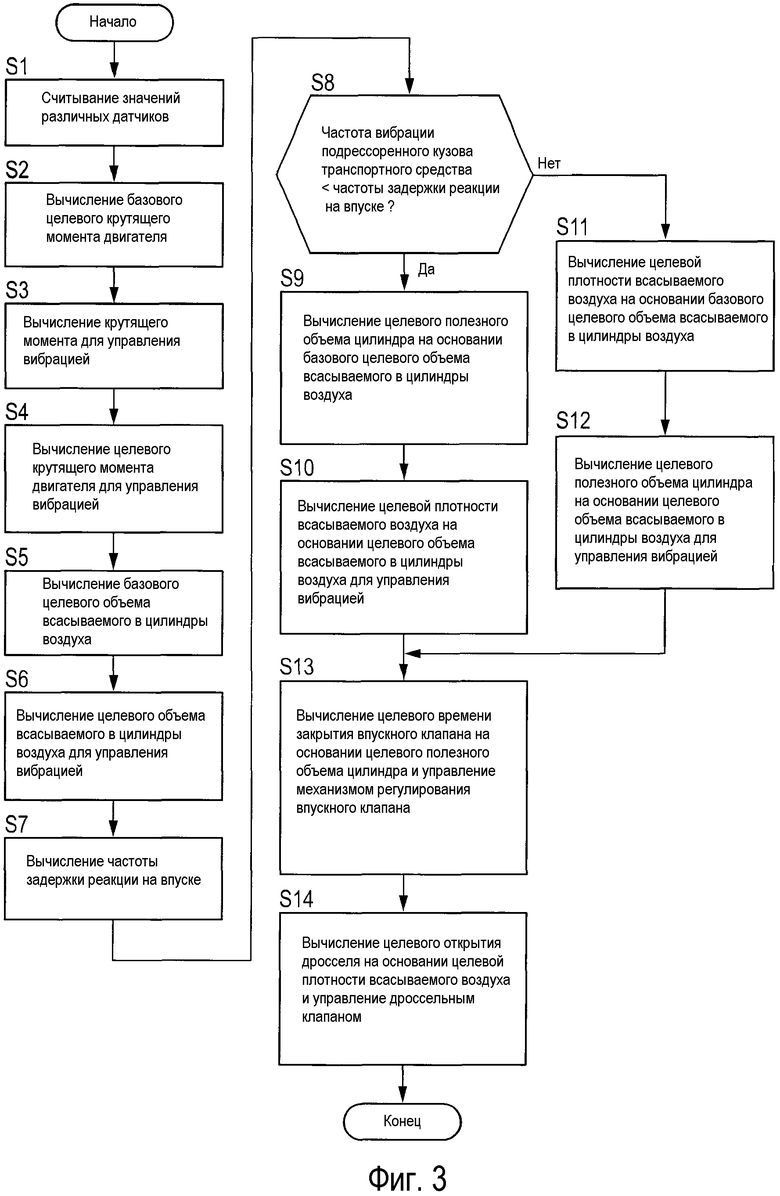
1. Устройство управления для двигателя внутреннего сгорания, установленного на транспортном средстве, содержащее:
- дроссельный клапан, предусмотренный во впускном канале двигателя внутреннего сгорания и допускающий изменение площади поперечного сечения впускного канала;
- регулируемый клапан, допускающий изменение времени открытия и закрытия впускного клапана двигателя внутреннего сгорания;
- модуль вычисления базового целевого крутящего момента, выполненный с возможностью вычисления базового целевого крутящего момента двигателя внутреннего сгорания согласно рабочему режиму двигателя внутреннего сгорания;
- модуль вычисления целевого крутящего момента для управления вибрацией, выполненный с возможностью вычисления целевого крутящего момента для управления вибрацией двигателя внутреннего сгорания для подавления вибрации транспортного средства согласно компоненту вибрации транспортного средства; и
- модуль управления объемом всасываемого в цилиндры воздуха, выполненный с возможностью управления объемом всасываемого в цилиндры воздуха посредством управления одним из дроссельного клапана и регулируемого клапана согласно целевому крутящему моменту для управления вибрацией и управления другим из дроссельного клапана и регулируемого клапана согласно базовому целевому крутящему моменту;
- причем модуль управления объемом всасываемого в цилиндры воздуха определяет, какой из дроссельного клапана и регулируемого клапана должен управляться согласно целевому крутящему моменту для управления вибрацией согласно компоненту вибрации транспортного средства.
2. Устройство управления для двигателя внутреннего сгорания по п. 1, в котором модуль управления объемом всасываемого в цилиндры воздуха включает в себя:
- модуль вычисления базового целевого объема всасываемого в цилиндры воздуха на основании базового целевого крутящего момента;
- модуль вычисления целевого объема всасываемого в цилиндры воздуха для управления вибрацией на основании целевого крутящего момента для управления вибрацией; и
- модуль вычисления целевых значений управления одного из дроссельного клапана и регулируемого клапана на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией и вычисления целевого значения управления другого из дроссельного клапана и регулируемого клапана на основании базового целевого объема всасываемого в цилиндры воздуха.
3. Устройство управления для двигателя внутреннего сгорания по п. 2, содержащее модуль коррекции целевых значений управления, выполненный с возможностью корректирования одного целевого значения управления, вычисленного на основании целевого объема всасываемого в цилиндры воздуха для управления вибрацией, на основании дифференциального объема всасываемого воздуха между оцененным объемом всасываемого в цилиндры воздуха, полученным, когда дроссельный клапан и регулируемый клапан соответственно управляются для достижения целевых значений управления, и целевым объемом всасываемого в цилиндры воздуха для управления вибрацией.
4. Устройство управления для двигателя внутреннего сгорания по п. 1, в котором:
- модуль управления объемом всасываемого в цилиндры воздуха определяет, какой из дроссельного клапана и регулируемого клапана должен управляться согласно целевому крутящему моменту для управления вибрацией на основании компонента вибрации транспортного средства и характеристики реакции для плотности всасываемого воздуха во впускном коллекторе.
5. Устройство управления для двигателя внутреннего сгорания по п. 4, в котором:
- модуль управления объемом всасываемого в цилиндры воздуха управляет дроссельным клапаном согласно целевому крутящему моменту для управления вибрацией и управляет регулируемым клапаном согласно базовому целевому крутящему моменту, когда частота вибрации для вибрации транспортного средства в качестве компонента вибрации транспортного средства ниже частоты задержки реакции на впуске, выражаемой посредством обратной величины постоянной времени задержки реакции для плотности всасываемого воздуха во впускном коллекторе.
6. Устройство управления для двигателя внутреннего сгорания по п. 4, в котором модуль управления объемом всасываемого в цилиндры воздуха управляет регулируемым клапаном согласно целевому крутящему моменту для управления вибрацией и управляет дроссельным клапаном согласно базовому целевому крутящему моменту, когда частота вибрации для вибрации транспортного средства в качестве компонента вибрации транспортного средства не ниже частоты задержки реакции на впуске, выражаемой посредством обратной величины постоянной времени задержки реакции для плотности всасываемого воздуха во впускном коллекторе.
7. Устройство управления для двигателя внутреннего сгорания по п. 1, в котором модуль вычисления целевого крутящего момента для управления вибрацией:
- вычисляет крутящий момент для управления вибрацией, имеющий компонент вибрации для компенсации компонента вибрации транспортного средства, на основании компонента вибрации транспортного средства; и
- вычисляет целевой крутящий момент для управления вибрацией посредством наложения крутящего момента для управления вибрацией на базовый целевой крутящий момент.
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ), БЛОК УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2256088C2 |
| СПОСОБ УПРАВЛЕНИЯ МОЩНОСТЬЮ СВОБОДНОПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И СВОБОДНОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО ШОБАНОВУ | 2005 |
|
RU2304226C2 |
| Способ получения искусственной смолы | 1937 |
|
SU52941A1 |
| WO 2011142018 A1, 17.11.2011 | |||
| Способ химической обработки металлических деталей | 1984 |
|
SU1182090A1 |

