Область техники
Изобретение относится к устройству управления амортизацией колебаний для транспортного средства, такого как автомобиль или т.п., и, в частности, к устройству управления амортизацией колебаний, которое управляет выходной мощностью приведения в движение (силой приведения в движение или крутящим моментом приведения в движение) транспортного средства, применяющего двигатель в качестве блока приведения в движение, чтобы амортизировать колебания кузова транспортного средства, и к транспортному средству, оснащенному устройством управления амортизацией колебаний.
Уровень техники
В то время как колебания, такие как продольные/вертикальные колебания и т.п., во время движения транспортного средства вызываются тормозящей силой/силой приведения в движение (или инерционной силой), действующей на кузов транспортного средства во время ускорения/торможения транспортного средства, или другими внешними силами, действующими на кузов транспортного средства, эти силы отражаются посредством "крутящих моментов колес", прикладываемых к поверхности дороги колесами (ведущими колесами, когда транспортное средство движется) (крутящими моментами, действующими между колесами и поверхностью дороги, на которую колеса опираются). Таким образом, в области управления амортизацией колебаний для транспортного средства предполагается амортизировать колебания кузова транспортного средства во время движения транспортного средства посредством регулирования крутящих моментов на колесах через управление выходной мощностью приведения в движение от двигателя транспортного средства или любого другого блока приведения в движение транспортного средства (см., например, публикацию заявки на патент Японии JP 2004-168148 и публикацию заявки на патент Японии JP 2006-69472). В этом управлении амортизацией колебаний для амортизации колебаний посредством управления выходной мощностью приведения в движение продольные/вертикальные колебания, которые вызываются на кузове транспортного средства, когда делается запрос ускорения/торможения транспортного средства или когда внешняя сила (возмущение) действует на кузов транспортного средства, чтобы вызывать отклонения в крутящих моментах на колесах, прогнозируются с помощью кинетической модели, структурированной с учетом механической модели так называемых колебаний подрессоренной части кузова транспортного средства или так называемых колебаний подрессоренной/неподрессоренной части кузова транспортного средства, и выходная мощность приведения в движение от блока приведения в движение транспортного средства регулируется так, чтобы амортизировать спрогнозированные колебания. В случае, когда управление амортизацией колебаний задумано таким образом, формирование колебательной энергии пресекается в большей степени посредством регулирования источника силы, вызывающей колебания, чем посредством поглощения сформированной колебательной энергии, как в случае управления амортизацией колебаний посредством подвески. Следовательно, получаются преимущества, такие как относительная быстрота операции амортизации колебаний, высокая энергоэффективность и т.п. Дополнительно, при управлении амортизацией колебаний, как описано выше, цель управления ограничена крутящими моментами на колесах или тормозящими силами/силами приведения в движение, прикладываемыми к колесам. Следовательно, регулировка управления является легкой.
Когда управление амортизацией колебаний выполняется посредством упомянутого управления выходной мощностью приведения в движение, выходная мощность блока приведения в движение колеблющимся образом изменяется чаще, чем обычно, чтобы управлять крутящими моментами на колесах таким образом, чтобы амортизировать продольные/вертикальные колебания транспортного средства. В этом отношении, когда выходная мощность колеблющимся образом изменяется за счет управления амортизацией колебаний, как описано выше в случае, когда блок приведения в движение транспортного средства является бензиновым двигателем, растет температура электродвигателя дроссельной заслонки для регулирования степени открытия электронно-управляемой дроссельной заслонки, которая управляет объемом всасываемого воздуха двигателя, привода или его проводника. Обнаружено, что рабочий отклик электродвигателя дроссельной заслонки или привода может, в связи с этим, ухудшаться.
В случае, когда бензиновый двигатель применяется в качестве блока приведения в движение, управление объемом всасываемого воздуха для управления выходной мощностью приведения в движение для выполнения управления амортизацией колебаний, как описано выше, выполняется посредством управления регулировкой степени открытия электронно-управляемой дроссельной заслонки. При этом управлении электронно-управляемой дроссельной заслонкой "электродвигатель дроссельной заслонки" или "привод" задействуется, чтобы смещать положение или угол корпуса клапана дроссельной заслонки так, что степень открытия дроссельной заслонки становится равной степени открытия для получения объема всасываемого воздуха, определенного согласно произвольному способу посредством электронного блока управления. В качестве электродвигателя дроссельной заслонки или привода обычно применяется электродвигатель постоянного тока (DC), шаговый электродвигатель или т.п. Такой электродвигатель или привод питается током, и в то же время управляется посредством электронного блока управления и приводит в действие корпус клапана так, что фактическая степень открытия дроссельной заслонки совпадает с требуемой степенью открытия дроссельной заслонки (целевым значением степени открытия дроссельной заслонки), соответствующей требуемому значению объема всасываемого воздуха, на основе значения положения или угла корпуса клапана, обнаруженного датчиком положения дроссельной заслонки или датчиком степени открытия дроссельной заслонки, или значения объема воздуха, обнаруженного датчиком объема всасываемого воздуха. В этой конфигурации, когда управление амортизацией колебаний требует колеблющейся выходной мощности приведения в движение, как описано выше, объем всасываемого воздуха и, следовательно, требуемая степень открытия дроссельной заслонки также изменяются колеблющимся образом. Следовательно, когда увеличивается частота, с которой позиция или угол корпуса клапана смещается, и особенно когда увеличиваются частота и/или амплитуда изменений в позиции или угле корпуса клапана, увеличиваются количество тока в единицу времени и количество сформированного тепла, получающегося в результате этого. Вследствие этого, температура электродвигателя дроссельной заслонки, привода или его проводника может расти (в случае, когда корпус клапана приводится в действие упомянутым электродвигателем, применяемым в типичной электронно-управляемой дроссельной заслонке, управляющий ток электродвигателя при сдвиге позиции или угла корпуса клапана увеличивается в большей степени, чем ток удержания в случае, когда корпус клапана удерживается в определенной позиции или под определенным углом). Когда температура электродвигателя дроссельной заслонки, привода или его проводника затем возрастает, рабочий отклик электродвигателя дроссельной заслонки или привода замедляется. В связи с этим может происходить ухудшение устойчивости управления амортизацией колебаний и задержка или сдвиг по фазе колебательного смещения степени открытия дроссельной заслонки. Следовательно, в некоторых случаях, эффект амортизации колебаний получается недостаточным.
Краткое описание изобретения
Изобретение предлагает конфигурацию для предотвращения роста температуры электродвигателя дроссельной заслонки, привода или его проводника, который получается в результате колебательных изменений в степени открытия электронно-управляемой дроссельной заслонки для объема всасываемого воздуха в случае, когда управление выходной мощностью приведения в движение от бензинового двигателя участвует в управлении амортизацией продольных/вертикальных колебаний, как описано выше.
Дополнительно, изобретение предоставляет устройство управления амортизацией колебаний, сконфигурированное так, чтобы предотвращать ослабление операции регулирования при управлении амортизацией колебаний, в то же время не допуская роста температуры электродвигателя дроссельной заслонки, привода или его проводника, как описано выше, и транспортное средство, оснащенное устройством управления амортизацией колебаний.
Устройство управления амортизацией колебаний в транспортном средстве согласно первому аспекту изобретения управляет степенью открытия дроссельной заслонки таким образом, чтобы амортизировать, по меньшей мере, один из компонента колебаний транспортного средства, получающегося в результате входного воздействия от поверхности дороги, и компонента колебаний транспортного средства, получающегося в результате входного воздействия на элемент оперативного управления, включающий в себя педаль акселератора и тормоз. В устройстве управления амортизацией колебаний величина изменения степени открытия дроссельной заслонки изменяется в зависимости от того, является ли температура привода дроссельной заслонки двигателя высокой или низкой. Согласно этой конфигурации компонент компенсации согласно управлению амортизацией колебаний не всегда непосредственно предоставляется электродвигателю дроссельной заслонки или приводу в качестве команды управления для управления выходной мощностью приведения в движение, и, по меньшей мере, часть компонента компенсации согласно управлению амортизацией колебаний изменяется в соответствии с температурой привода дроссельной заслонки двигателя. Следовательно, частота или величина отклонений в степени открытия дроссельной заслонки уменьшается, и, соответственно, величина тока уменьшается. Таким образом, рост температуры электродвигателя дроссельной заслонки, привода или его проводника, вероятно, должен быть предотвращен.
Устройство управления амортизацией колебаний в транспортном средстве согласно второму аспекту изобретения, которое выполняет управление амортизацией колебаний для амортизации продольных колебаний или вертикальных колебаний транспортного средства посредством управления выходной мощностью приведения в движение транспортного средства, включает в себя часть управления амортизацией колебаний, которая управляет крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний на основе крутящего момента на колесе, действующего на каждое колесо транспортного средства, который формируется в месте поверхности дороги, где опирается колесо, а также часть регулирования компонента компенсации, которая изменяет величину, по меньшей мере, части компонента компенсации для компенсирования крутящего момента на колесе для управления амортизацией колебаний, которая вычисляется посредством части управления амортизацией колебаний, на основе величины изменения в степени открытия дроссельной заслонки двигателя, ссылаясь на величину изменения в степени открытия дроссельной заслонки, с тем, чтобы не допускать роста температуры электродвигателя дроссельной заслонки, привода или его проводника. В соответствии с этой конфигурацией компонент компенсации согласно управлению амортизацией колебаний не всегда непосредственно предоставляется электродвигателю дроссельной заслонки или приводу в качестве команды управления для управления выходной мощностью приведения в движение. Вместо этого, по меньшей мере, часть компонента компенсации согласно управлению амортизацией колебаний изменяется в соответствии с величиной изменения в степени открытия дроссельной заслонки. Следовательно, частота или величина отклонений в степени открытия дроссельной заслонки уменьшается, и, соответственно, уменьшается величина тока. Таким образом, рост температуры электродвигателя дроссельной заслонки, привода или его проводника, вероятно, должен быть предотвращен. В упомянутой конфигурации величина изменения в степени открытия дроссельной заслонки может быть либо величиной изменения в требуемой степени открытия дроссельной заслонки, либо величиной изменения в фактической степени открытия дроссельной заслонки.
В конфигурации дроссельной заслонки двигателя, примененной ко второму аспекту изобретения, как уже описано, было обнаружено, что увеличивается ток, подаваемый на электродвигатель дроссельной заслонки или привод, когда степень открытия дроссельной заслонки изменяется. Соответственно, когда частота и амплитуда величины изменения степени открытия дроссельной заслонки увеличиваются, увеличивается вероятность роста температуры электродвигателя дроссельной заслонки, привода или его проводника. Таким образом, в конфигурации устройства согласно второму аспекту изобретения, часть регулирования компонента компенсации может уменьшать величину, по меньшей мере, части компонента компенсации для компенсирования крутящего момента на колесе, когда частота или амплитуда величины изменения в степени открытия дроссельной заслонки становится равной или большей, чем заданное значение. Следует отметить, что при определении того, что частота или амплитуда величины изменения в степени открытия дроссельной заслонки стала равной или большей, чем заданное значение, условие того, что появление частоты или амплитуды величины изменения в степени открытия дроссельной заслонки, равной или большей, чем заданное значение, наблюдалось хотя бы один раз, может быть использовано в качестве условия для выполнения определения, или условие того, что появление частоты или амплитуды величины изменения в степени открытия дроссельной заслонки, равной или большей, чем заданное значение, наблюдалось более чем заданное число раз в течение заданного периода или последовательно может быть использовано в качестве условия для выполнения определения. Дополнительно, в процессе исследования и усовершенствования изобретателем изобретения было обнаружено, что температура проводника электродвигателя дроссельной заслонки может быть оценена на основе величины изменения в степени открытия дроссельной заслонки. Таким образом, в конфигурации устройства согласно второму аспекту изобретения часть регулирования компонента компенсации может оценивать температуру проводника для подачи тока на электродвигатель дроссельной заслонки для регулирования степени открытия дроссельной заслонки на основе величины изменения в степени открытия дроссельной заслонки и уменьшать величину, по меньшей мере, части компонента компенсации, когда температура проводника становится выше, чем заданное значение.
Дополнительно, что касается одного режима, в котором величина, по меньшей мере, части компонента компенсации уменьшается в изобретении, как понятно из предшествующего описания, одним из признаков компонента, в качестве причины роста температуры проводника электродвигателя дроссельной заслонки, является то, что частота является высокой. Следовательно, часть регулирования компонента компенсации может уменьшать величину, по меньшей мере, части компонента компенсации, устраняя часть, которая имеет частоту, более высокую, чем заданная частота, из значения крутящего момента на колесе, вводимого в часть управления амортизацией колебаний или компонент компенсации. В ситуации, в которой величина, по меньшей мере, части компонента компенсации должна быть уменьшена, дальнейший рост температуры должен быть предотвращен. Следовательно, часть регулирования компонента компенсации может уменьшать величину, по меньшей мере, части компонента компенсации, уменьшая коэффициент усиления системы управления для компонента компенсации.
Кроме того, известно, что часть компонента компенсации, полученная из части управления амортизацией колебаний, которая может иметь особенно высокую частоту, является компонентом компенсации для управления крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний, вызванных крутящим моментом на колесе, фактически прикладываемым к каждому колесу (т.е. "возмущение крутящего момента на колесе"). Таким образом, в устройстве управления амортизацией колебаний согласно второму аспекту изобретения часть управления амортизацией колебаний может иметь часть управления амортизацией колебаний с прямой связью, которая вычисляет компонент компенсации для управления крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний, вызванных крутящим моментом на колесе, сформированным посредством запроса ускорения/торможения транспортного средства или запроса поворота транспортного средства, и часть управления амортизацией колебаний с обратной связью, которая вычисляет компонент компенсации для управления крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний, вызванных крутящим моментом на колесе, фактически прикладываемым к каждому колесу, и часть регулирования компонента компенсации может уменьшать величину, по меньшей мере, части компонента компенсации, вычисленного частью управления амортизацией колебаний с обратной связью. В этом случае часть управления амортизацией колебаний с прямой связью корректирует (компенсирует) команду управления для выходной мощности приведения в движение (крутящего момента) двигателя таким образом, чтобы предотвращать появление продольных колебаний или вертикальных колебаний, получающихся в результате отклонений в крутящем моменте на колесе с относительно низкой частотой, что соответствует запросу ускорения/торможения транспортного средства или запросу поворота транспортного средства. С другой стороны, компонент компенсации, вычисленный частью управления амортизацией колебаний с обратной связью, главным образом, амортизирует продольные колебания или вертикальные колебания, получающиеся в результате возмущающего воздействия, действующего на кузов транспортного средства. Следовательно, согласно этой конфигурации, компонент компенсации для амортизации продольных/вертикальных колебаний может быть устранен или уменьшен в соответствии с характеристикой компонента компенсации. Рост температуры электродвигателя дроссельной заслонки, привода или его проводника, как ожидается, должен уменьшаться или пресекаться без уменьшения эффекта от компонента компенсации, который имеет относительно низкую частоту и вычисленного частью управления амортизацией колебаний с прямой связью. Следует понимать, что величина, по меньшей мере, части компонента компенсации может быть уменьшена согласно любому одному из вышеупомянутых способов. Часть управления амортизацией колебаний с прямой связью ссылается на запрос поворота транспортного средства для того, чтобы ограничивать колебательный компонент согласно изменениям в крутящем моменте на колесе, вызванным изменениями в угле поворота каждого колеса транспортного средства.
Как понятно из вышеупомянутой последовательности описаний, устройство, на которое нацелено изобретение, предназначено предотвращать или ограничивать, посредством управления выходной мощностью приведения в движение, передачу компонента колебания, передаваемого от поверхности дороги через каждое колесо, на кузов транспортного средства в транспортном средстве, таком как автомобиль или т.п., при этом его выходная мощность приведения в движение регулируется посредством управления степенью открытия дроссельной заслонки бензинового двигателя. Другими словами, устройство, на которое нацелено изобретение, должно быть устройством управления приведением в движение, сконфигурированным так, что крутящий момент, обратный по фазе колебаниям (обычно около 1-4 Гц), вызывающий колебания на кузове транспортного средства, прикладывается к каждому колесу, когда такие колебания вызываются в скорости колеса или крутящем моменте на колесе. Тогда, в частности, задачей изобретения является предотвращение роста температуры электродвигателя дроссельной заслонки или привода, как результата состояния, в котором степень открытия дроссельной заслонки изменяется чаще, когда компонент колебания передается транспортному средству от поверхности дороги, чем, когда такой компонент колебания не передается транспортному средству. Таким образом, согласно третьему аспекту изобретения предоставляется транспортное средство, которое управляет степенью открытия дроссельной заслонки таким образом, чтобы амортизировать, по меньшей мере, один из компонента колебаний транспортного средства, получающегося в результате входного воздействия от поверхности дороги, и компонента колебаний транспортного средства, получающегося в результате входного воздействия на элемент оперативного управления, включающий в себя педаль акселератора и педаль тормоза. В этом транспортном средстве степень открытия дроссельной заслонки изменяется на величину, которая меняется в соответствии с температурой привода дроссельной заслонки. Дополнительно, в третьем аспекте изобретения величина изменения степени открытия дроссельной заслонки может уменьшаться, когда температура привода дроссельной заслонки растет. В этой конфигурации любой способ может применяться, пока температура привода дроссельной заслонки может быть обнаружена или рассчитана. Например, температура может быть непосредственно обнаружена посредством снабжения привода дроссельной заслонки или его проводника датчиком температуры (термопарой или т.п.). Дополнительно, в третьем аспекте изобретения, значение, представляющее рабочий отклик привода дроссельной заслонки, например разницу между значением требуемой степени открытия дроссельной заслонки и значением фактической степени открытия дроссельной заслонки или т.п., может быть обнаружено, и температура привода дроссельной заслонки может быть рассчитана на основе значения, представляющего рабочий отклик привода дроссельной заслонки (скорость реакции уменьшается, когда температура растет).
Дополнительно, как уже описано, в случае, когда температура привода дроссельной заслонки не падает или растет после того, как температура однажды выросла, и величина изменения степени открытия дроссельной заслонки уменьшается, когда степень открытия дроссельной заслонки дополнительно изменяется, отклик дроссельной заслонки может дополнительно ухудшаться. Таким образом, в третьем аспекте изобретения величина изменения в степени открытия дроссельной заслонки может уменьшаться, когда температура привода дроссельной заслонки становится равной первой температуре, и работа дроссельной заслонки может быть остановлена, когда температура привода дроссельной заслонки становится равной второй температуре, более высокой, чем первая температура. Согласно этой конфигурации восстановление отклика дроссельной заслонки выполняется вследствие падения температуры дроссельной заслонки в результате остановки работы дроссельной заслонки.
Управление амортизацией продольных/вертикальных колебаний, которое является целью изобретения, является уникальным управлением, требующим изменений в выходной мощности, более частых, чем при традиционном управлении выходной мощностью приведения в движение. Следовательно, при фактическом применении этого управления к транспортному средству, необходимо гарантировать то, что это управление соответствует различным существующим механизмам, относящимся к управлению выходной мощностью приведения в движение. Изобретение должно корректировать конфигурацию управления амортизацией колебаний так, чтобы не ухудшать скорость отклика электродвигателя дроссельной заслонки или привода посредством недопущения роста температуры электродвигателя дроссельной заслонки, привода или его проводника, который, в частности, выбирается из этих существующих механизмов для управления выходной мощностью приведения в движение. Согласно этой конфигурации изобретения даже в случае, когда управление амортизацией колебаний объединено с частью управления выходной мощностью приведения в движение, рост температуры электродвигателя дроссельной заслонки или привода предотвращается. В результате, может быть предотвращено ухудшение скорости отклика электродвигателя дроссельной заслонки или привода и ослабление действия амортизации колебаний, получающееся в результате этого.
Другие цели и преимущества изобретения станут очевидными из последующего описания предпочтительного варианта осуществления изобретения.
Краткое описание чертежей
Вышеупомянутые и дополнительные признаки и преимущества изобретения станут очевидными из последующего писания примерного варианта осуществления, приведенного со ссылкой на прилагаемые чертежи. На этих чертежах одинаковыми ссылочными позициями обозначены идентичные элементы. На чертежах:
Фиг. 1A - схематический вид автомобиля, оснащенного устройством управления амортизацией колебаний согласно варианту осуществления изобретения. Фиг. 1B и 1C - схематические виды электронно-управляемой дроссельной заслонки (или корпуса дроссельной заслонки), применяемой в двигателе транспортного средства с фиг. 1A, причем фиг. 1B представляет собой вид спереди корпуса клапана (который виден в том же направлении, что и поток воздуха через впускной патрубок), а фиг. 1C представляет собой боковой вид в разрезе фиг. 1B. Контроллер 22e тока подает ток от аккумулятора на электродвигатель 74 на основе команды управления от электронного блока управления, и электродвигатель 74 формирует вращательную силу против силы упругости пружины возврата так, что степень θst открытия корпуса 70 клапана или угловое положение ψ корпуса 70 клапана совпадает с требуемой степенью открытия или целевым углом. Значение тока, текущего к электродвигателю, значительно увеличивается, когда позиция корпуса клапана смещается, чем когда корпус клапана удерживается в позиции.
Фиг. 2 - внутренняя конфигурация электронного блока управления, показанного на фиг. 1A, 1B и 1C, в форме блок-схемы управления. Различные параметры, отличные от показанных на фиг. 2, например, такие как температура двигателя и т.п., могут быть введены в часть определения объема всасываемого воздуха, часть управления моментом зажигания и часть управления степенью открытия дроссельной заслонки. Дополнительно, могут быть предусмотрены различные известные части управления (не показаны), такие как часть управления объемом впрыска топлива и т.п.
Фиг. 3A - вид, объясняющий переменную состояния колебаний кузова транспортного средства, амортизируемых во время работы части управления амортизацией колебаний устройства управления приведением в движение согласно одному варианту осуществления изобретения. Фиг. 3B - вид, объясняющий "модель колебания подрессоренной части" в качестве одной из механических кинетических моделей колебаний кузова транспортного средства, предполагаемых в части управления амортизацией колебаний согласно варианту осуществления изобретения. Фиг. 3C - вид, объясняющий модель колебания подрессоренной/неподрессоренной части.
Фиг. 4A и 4B - виды, каждый из которых показывает конфигурацию части управления амортизацией колебаний согласно варианту осуществления изобретения в форме блок-схемы управления, причем фиг. 4A и 4B показывают конфигурацию части 52a управления амортизацией колебаний с прямой связью с фиг. 2 и конфигурацию части 52b управления амортизацией колебаний с обратной связью, соответственно.
Фиг. 5A - конфигурация внутренней структуры части регулирования коэффициента усиления системы управления с фиг. 2 в форме блок-схемы управления. Фиг. 5B - вид, объясняющий способ вычисления изменения в степени открытия дроссельной заслонки во времени, частоту степени открытия дроссельной заслонки и амплитуду степени открытия дроссельной заслонки после HPF-обработки. Фиг. 5C - схематическая карта расчетной температуры проводника электродвигателя, в которой частота и амплитуда степени открытия дроссельной заслонки используются в качестве переменных. Каждая точка в рамке на фиг. 5C указывает, что дана расчетная температура. Дополнительно, толстая сплошная линия, начерченная между частотой Fo и амплитудой Ao в рамке на фиг. 5C, представляет границу порогового значения Tlimit расчетной температуры. Каждая стрелка в верхнем пустом месте показывает направление, в котором частота увеличивается, а каждая стрелка в нижнем пустом месте показывает направление, в котором увеличивается амплитуда.
Подробное описание варианта осуществления изобретения
Вариант осуществления изобретения будет описан подробно далее со ссылкой на прилагаемые чертежи. На чертежах одинаковыми ссылочными позициями обозначены одинаковые компоненты.
Конфигурация устройства
Фиг. 1A схематически показывает транспортное средство, такое как автомобиль или т.п., которое оснащено устройством управления приведением в движение, которое выполняет управление амортизацией колебаний согласно варианту осуществления изобретения. На фиг. 1A транспортное средство 10, имеющее переднее правое колесо 12FR, переднее левое колесо 12FL, заднее правое колесо 12RR и заднее левое колесо 12RL, оснащено блоком 20 приведения в движение, который прикладывает силу приведения в движение или крутящий момент приведения в движение к каждому из задних колес в соответствии с надавливанием педали 14 акселератора водителем в обычном режиме. В примере, показанном на фиг. 1A, блок 20 приведения в движение сконфигурирован так, чтобы передавать крутящий момент приведения в движение или вращательную силу приведения в движение от двигателя 22 к каждому из задних колес 12RR и 12RL через преобразователь 24 крутящего момента, автоматическую трансмиссию 26, механизм 28 дифференциальной передачи и т.п. Хотя это не показано на фиг. 1A ради простоты, транспортное средство 10 снабжено блоком тормоза, который прикладывает силу торможения к каждому из колес как в случае с традиционными транспортными средствами, и блок рулевого управления для управления углом поворота каждого из передних колес или углом поворота каждого из передних колес и задних колес. Кроме того, транспортное средство может быть транспортным средством с приводом на четыре колеса или транспортным средством с приводом на передние колеса.
Двигатель 22 является бензиновым двигателем известной конструкции, и впускной патрубок 22a снабжен электронно-управляемым блоком 22b дроссельной заслонки известного типа, как схематически показано на фиг. 1B и 1C, с тем, чтобы регулировать объем всасываемого воздуха так, чтобы достигать требуемого крутящего момента приведения в движение, который определяется в соответствии с величиной вдавливания педали акселератора и описанными ниже управляющими величинами. В блоке 22b дроссельной заслонки, как показано на фиг. 1B и 1C, корпус 70 клапана установлен во впускном патрубке 22a с возможностью вращения вокруг поворотной оси, перпендикулярной направлению потока воздуха, и площадь проходного сечения для воздуха во впускном патрубке, а именно - "степень открытия дроссельной заслонки", управляется в соответствии с угловой позицией корпуса 70 клапана. Угловая позиция корпуса 70 клапана или степень открытия дроссельной заслонки отслеживается датчиком 76 положения дроссельной заслонки и одновременно управляется описанным ниже электронным блоком 50 управления. Электродвигатель 74 дроссельной заслонки поворачивает корпус 70 клапана против силы упругости пружины 72 возврата так, что степень открытия дроссельной заслонки совпадает с требуемой степенью открытия дроссельной заслонки для достижения требуемого значения объема всасываемого воздуха (т.е. крутящего момента приведения в движение), и угловое положение корпуса 70 клапана или степень открытия дроссельной заслонки, таким образом, регулируется. Электродвигатель 74 дроссельной заслонки может быть DC-электродвигателем или шаговым электродвигателем, который применяется в известном электродвигателе дроссельной заслонки. Контроллер 22e тока управляет током, подаваемым от аккумулятора к электродвигателю 74 дроссельной заслонки через проводник 76 электропитания, на основе значения команды тока, выданной из электронного блока 50 управления, и вращательная сила электродвигателя 74 дроссельной заслонки, таким образом, регулируется. Известно, что ток, подаваемый к электродвигателю 74, увеличивается в большей степени, когда угловое положение корпуса клапана изменяется, чем когда угловое положение удерживается в определенном положении.
Как показано на фиг. 1A, управление выходной мощностью приведения в движение от двигателя 22 выполняется электронным блоком 50 управления. Электронный блок 50 управления может включать в себя схему управления и традиционно спроектированный микрокомпьютер, имеющий центральный процессор (ЦП), ПЗУ, ОЗУ и блок порта ввода/вывода, которые соединены друг с другом двунаправленной общей шиной. Сигнал, указывающий скорость Vwi каждого колеса (i=FR, FL, RR, RL), который передается от датчика 30i скорости каждого колеса (i=FR, FL, RR, RL), установленного на соответствующем колесе, сигнал, указывающий угловое положение ψ дроссельной заслонки или степень θst открытия дроссельной заслонки, который передается от датчика 76 положения дроссельной заслонки, и сигналы, указывающие скорость ne вращения двигателя, величину θa вдавливания педали акселератора, выходную скорость вращения трансмиссии, положение рычага переключения передач, установленное водителем и т.п., которые передаются от датчиков, предусмотренных в соответствующих частях транспортного средства, вводятся в электронный блок 50 управления. Следует понимать, что различные сигналы обнаружения для получения различных параметров, необходимых для различных типов управления, которые должны выполняться в транспортном средстве согласно этому варианту осуществления изобретения, могут вводиться в электронный блок 50 управления в дополнение к вышеупомянутым сигналам.
Устройство управления амортизацией колебаний согласно изобретению реализовано в упомянутом электронном блоке 50 управления. Фиг. 2 показывает внутреннюю конфигурацию электронного блока 50 управления согласно варианту осуществления изобретения в форме блока управления.
Как показано на фиг. 2, электронный блок 50 управления может состоять из устройства 50a управления приведением в движение, который управляет работой двигателя, устройства 50b управления тормозом, который управляет работой блока тормоза (не показано), а также различных устройств управления (не показано), установленных в электронном блоке управления известного транспортного средства, использующего бензиновый двигатель. Следует понимать, что конфигурации и операции различных устройств управления, таких как устройство управления приведением в движение и т.п., включающих в себя устройство управления амортизацией колебаний, реализуются посредством операции обработки ЦП и т.п. в электронном блоке 50 управления во время движения транспортного средства.
Как показано на фиг. 2, электрический сигнал импульсного типа для каждого из датчиков 30FR, 30FL, 30RR и 30RL скорости колеса на соответствующих колесах, который последовательно формируется каждый раз, когда соответствующее из колес поворачивается на заданную величину, вводится в устройство 50b управления тормозом. Скорость вращения каждого колеса вычисляется посредством измерения временного интервала поступления этого последовательно вводимого импульсного сигнала. Значение r·ω скорости колеса вычисляется посредством умножения этой скорости вращения колеса на радиус колеса. Значение r·ω скорости колеса затем передается устройству 50a управления приведением в движение, чтобы выполнять управление амортизацией колебаний, которое будет описано ниже более детально, и используется при вычислении расчетного значения крутящего момента на колесе. Альтернативно, устройство 50a управления приведением в движение может вычислять скорость колеса из скорости вращения колеса. В этом случае скорость вращения колеса предоставляется устройству 50a управления приведением в движение из устройства 50b управления тормозом.
Устройство 50a управления приведением в движение включает в себя, в качестве своей основной конфигурации, часть 51 определения требуемого крутящего момента приведения в движение, которая определяет требуемое значение крутящего момента приведения в движение от двигателя, требуемого водителем, на основе величины θa вдавливания педали акселератора от датчика педали акселератора, часть 52a управления амортизацией колебаний с прямой связью и часть 52b управления амортизацией колебаний с обратной связью, которые вычисляют требуемые компоненты компенсации крутящего момента приведения в движение для выполнения управления амортизацией колебаний для амортизации продольных/вертикальных колебаний кузова транспортного средства посредством управления крутящим моментом приведения в движение, чтобы компенсировать (корректировать) требуемое значение крутящего момента приведения в движение, часть 53 определения объема всасываемого воздуха, которая определяет требуемое значение объема всасываемого воздуха двигателя для достижения требуемого крутящего момента приведения в движение на основе требуемого значения крутящего момента приведения в движение, компенсированного посредством упомянутых двух частей управления амортизацией колебаний, часть 54 управления степенью открытия дроссельной заслонки, которая управляет степенью открытия дроссельной заслонки на основе требуемого значения объема всасываемого воздуха, и различные части управления известных типов для управления моментом зажигания топлива и т.п.
В этой основной конфигурации часть 51 определения требуемого крутящего момента приведения в движение может определять требуемое значение крутящего момента приведения в движение из величины θa вдавливания педали акселератора (и/или запроса, заданного посредством условного автоматического управления движением) согласно любому известному способу. Как показано на фиг. 2, часть 52a управления амортизацией колебаний с прямой связью принимает требуемое значение крутящего момента приведения в движение (перед компенсацией), определенное частью 51 определения требуемого крутящего момента приведения в движение, и вычисляет компонент компенсации для уменьшения или уравновешивания компонента колебаний в требуемом значении крутящего момента приведения в движение (перед компенсацией), который может вызывать продольные/вертикальные колебания на кузове транспортного средства, согласно режиму, который будет описан ниже более детально. Сумматор a1 накладывает этот компонент компенсации на требуемое значение крутящего момента приведения в движение (перед компенсацией). С другой стороны, часть 52b управления амортизацией колебаний с обратной связью принимает расчетное значение крутящего момента на колесе, фактически прикладываемого к каждому из колес, которое рассчитывается из скорости r·ω колеса устройством 52c оценки крутящего момента на колесе, и вычисляет компонент компенсации для уменьшения или уравновешивания компонента колебаний в расчетном значении крутящего момента на колесе, который может вызывать продольные/вертикальные колебания на кузове транспортного средства, а именно - резкое отклонение компонента колебаний в крутящем моменте на колесе, согласно режиму, который будет описан ниже более детально. Сумматор a2 накладывает этот компонент компенсации, вычисленный частью управления амортизацией колебаний с обратной связью, на требуемое значение крутящего момента приведения в движение. [Часть управления амортизацией колебаний с прямой связью может дополнительно вычислять компонент компенсации для определения продольных/вертикальных колебаний из изменений в крутящем моменте на колесе, вызываемых на каждом из колес посредством операции торможения или операции руления водителем. В этом случае, как указано пунктирными линиями на фиг. 2, расчетное значение крутящего момента на колесе, рассчитанное на основе величины действия тормоза или величины операции руления, вводится в часть управления амортизацией колебаний с прямой связью и обрабатывается тем же образом, что и требуемое значение крутящего момента приведения в движение, чтобы вычислять компонент компенсации].
Часть 53 определения объема всасываемого воздуха, часть 54 управления степенью открытия дроссельной заслонки, часть управления моментом зажигания и т.п. могут выполнять управление приведением в движение от бензинового двигателя любого известного типа для достижения требуемого значения крутящего момента приведения в движение в выходной мощности приведения в движение от бензинового двигателя. Чтобы быть точным, часть 53 определения объема всасываемого воздуха обращается к скорости ne вращения двигателя в этот момент, определяет целевое значение объема всасываемого воздуха для реализации требуемого крутящего момента приведения в движение от двигателя посредством карты, определенной заранее экспериментально или теоретически, затем определяет объем впрыска топлива (не показан) и момент зажигания из соответствия скорости вращения двигателя и определенного целевого значения объема всасываемого воздуха и передает команду управления (не показана) соответствующему контроллеру. Что касается управления объемом всасываемого воздуха, то требуемое значение объема всасываемого воздуха передается части 54 управления степенью открытия дроссельной заслонки, и определяется требуемое значение степени открытия дроссельной заслонки (требуемая степень открытия дроссельной заслонки), соответствующее требуемому значению объема всасываемого воздуха. Требуемая степень открытия дроссельной заслонки затем сравнивается с фактическим значением степени открытия от датчика 76 положения дроссельной заслонки (фактическая степень открытия дроссельной заслонки). Команда управления в качестве команды для тока, который должен подаваться к электродвигателю, передается контроллеру 22e тока, чтобы приводить в действие электродвигатель так, что требуемая степень открытия дроссельной заслонки совпадает с фактической степенью открытия дроссельной заслонки. (Согласно управлению объемом всасываемого воздуха посредством регулирования степени открытия дроссельной заслонки выходная мощность приведения в движение от двигателя, а именно "выходной крутящий момент двигателя x скорость вращения двигателя", увеличивается/уменьшается. Однако скорость вращения двигателя механически ограничена скоростью транспортного средства, а скорость транспортного средства мгновенно не изменяется. Соответственно, крутящий момент приведения в движение от двигателя управляется посредством настройки степени открытия дроссельной заслонки в соответствии с требуемым значением объема всасываемого воздуха, определенным со ссылкой на скорость вращения двигателя).
В дополнение к вышеописанной основной конфигурации в устройстве управления приведением в движение, оснащенном устройством управления амортизацией колебаний согласно варианту осуществления изобретения, устройство 52d регулирования коэффициента усиления системы управления предусмотрено на выходе части 52b управления амортизацией колебаний с обратной связью в качестве части регулирования компонента компенсации для регулирования коэффициента усиления для компонента компенсации части управления амортизацией колебаний в соответствии с величиной изменения требуемой степени открытия дроссельной заслонки (или фактической степени открытия дроссельной заслонки). Как описано в разделе "Краткое описание изобретения", компонент компенсации для управления амортизацией продольных/вертикальных колебаний является компонентом колебания. Соответственно, когда компонент компенсации накладывается на требуемый крутящий момент приведения в движение, чтобы компенсировать требуемый крутящий момент приведения в движение, требуемый крутящий момент приведения в движение колеблется чаще, чем в случае, когда управление амортизацией колебаний не выполняется. Для того чтобы следовать колебаниям требуемого крутящего момента приведения в движение, степень открытия дроссельной заслонки или угловое положение корпуса клапана может колебательным образом изменяться. Это колебательное изменение в степени открытия дроссельной заслонки или угловом положении корпуса дроссельной заслонки ведет к росту величины тока, протекающего через электродвигатель 74 дроссельной заслонки, и температура электродвигателя и его проводника 78 растут из-за джоулева тепла, формируемого током. В этом случае, отклик на срабатывание корпуса дроссельной заслонки посредством электродвигателя может ухудшаться (характеристика следования фактической степени открытия дроссельной заслонки по отношению к требуемой степени открытия дроссельной заслонки ухудшается). Тогда эффект амортизации колебания может не быть достигнут в достаточной степени, например, из-за сдвига по фазе изменений крутящего момента приведения в движение при управлении амортизацией колебаний. Дополнительно, когда степень открытия дроссельной заслонки продолжает регулироваться с ухудшающимся, таким образом, откликом, происходит дальнейший рост температуры. В результате может происходить дальнейшее ухудшение отклика. Таким образом, в варианте осуществления изобретения, с тем, чтобы пресекать такое формирование тепла в электродвигателе и его проводнике 78, температура электродвигателя или его проводника оценивается на основе величины изменения в степени открытия дроссельной заслонки, и коэффициент усиления регулируется, чтобы уменьшать компоненты компенсации согласно управлению амортизацией колебаний, когда температура является высокой, как будет описано ниже более детально.
Что касается компонентов компенсации согласно управлению амортизацией колебаний, компонент компенсации части управления амортизацией колебаний с прямой связью помогает уменьшать или уравновешивать тот компонент требуемого крутящего момента приведения в движение от двигателя, который вызывает продольные/вертикальные колебания. Следовательно, требуемое значение крутящего момента приведения в движение, компенсируемое этим компонентом компенсации, как ожидается, будет более гладким и меньшим по амплитуде, чем его значение до компенсации. С другой стороны, компонент компенсации части управления амортизацией колебаний с обратной связью помогает амортизировать продольные/вертикальные колебания, вызванные изменениями в крутящем моменте на колесе, возникающими в результате отклонений крутящего момента на колесе, а именно от внешних сил, действующих на кузов транспортного средства или каждое из колес, например от неровности поверхности дороги, несбалансированности шин, бокового ветра и т.п. Следовательно, требуемое значение крутящего момента приведения в движение, скомпенсированное этим компонентом компенсации, может быть большим по амплитуде и включать в себя компонент с более высокой частотой, чем его значение перед компенсацией. То есть компонент, вызывающий частые колебательные изменения в степени открытия дроссельной заслонки, зачастую является компонентом компенсации части управления амортизацией колебаний с обратной связью. Таким образом, устройство регулирования коэффициента усиления для уменьшения компонентов компенсации согласно управлению амортизацией колебаний может быть предусмотрено только в выходной части в части 52b управления амортизацией колебаний с обратной связью.
Дополнительно, вместо или в комбинации с вышеупомянутым устройством 52d регулирования коэффициента усиления, средство выполнения обработки с низкочастотным фильтром (LPF) для устранения или уменьшения такой части компонента компенсации, которая имеет частоту, превышающую заданную частоту, может быть предусмотрено на входной стороне (указанной пунктирными линиями на фиг. 2) части 52b управления амортизацией колебаний с обратной связью или на выходной стороне (которая может быть реализована в устройстве 52d регулирования коэффициента усиления) части 52b управления амортизацией колебаний с обратной связью. Как и в случае с регулировкой коэффициента усиления, LPF-обработка может выполняться, когда температура электродвигателя или его проводника, рассчитанная на основе величины изменения степени открытия дроссельной заслонки, является высокой. Частота LPF-среза может быть определена экспериментально или теоретически.
Работа устройства
(i) Управление амортизацией продольных/вертикальных колебаний
В вышеупомянутой конфигурации управление амортизацией продольных/вертикальных колебаний может выполняться в следующем режиме частью 52a управления амортизацией колебаний с прямой связью, показанной на фиг. 2, и частью 52b амортизации колебаний с обратной связью, показанной на фиг. 2.
(Принцип управления амортизацией колебаний)
В транспортном средстве, когда блок приведения в движение работает на основе запроса движения, заданного водителем, и крутящий момент на колесе меняется, вертикальные колебания центра тяжести Cg кузова транспортного средства в вертикальном направлении (z-направлении) и продольные колебания в продольном направлении (θ-направлении) около центра тяжести кузова транспортного средства могут происходить в кузове 10 транспортного средства, приведенного в качестве примера на фиг. 3A. Дополнительно, когда внешние силы или крутящие моменты (возмущающие воздействия) действуют на каждое из колес от поверхности дороги во время движения транспортного средства, возмущающие воздействия передаются транспортному средству. В этом случае в кузове транспортного средства также могут происходить колебания в вертикальном направлении и в продольном направлении. Таким образом, при управлении амортизацией продольных/вертикальных колебаний, которые приведены в качестве примера в данном документе, структурируется кинетическая модель продольных/вертикальных колебаний кузова транспортного средства. В модели, смещения z и θ кузова транспортного средства во время, когда вводится (значение, полученное посредством преобразования) требуемый крутящий момент приведения в движение (в крутящий момент на колесе) или текущий крутящий момент на колесе (его расчетное значение), и вычисляются скорости dz/dt и dθ/dt их изменения, а именно переменные состояния колебаний кузова транспортного средства, и крутящий момент приведения в движение от блока приведения в движение (двигателя) регулируется (требуемый крутящий момент приведения в движение корректируется) так, что амортизируются переменные состояния, полученные из сведения модели к 0, а именно - продольные/вертикальные колебания. Вычисляемая величина регулирования крутящего момента приведения в движение является величиной компонента компенсации из части амортизации колебаний с прямой связью, когда вводится требуемый крутящий момент приведения в движение, и вычисляемая величина регулирования крутящего момента приведения в движение является величиной компонента компенсации из части амортизации колебаний с обратной связью, когда вводится текущий крутящий момент на колесе.
Таким образом, прежде всего, как механическая кинетическая модель кузова транспортного средства в вертикальном направлении и в продольном направлении при управлении амортизацией колебаний, кузов транспортного средства рассматривается как жесткий кузов S с массой М и инерционным моментом I, и предполагается, что этот жесткий кузов S поддерживается подвеской передних колес с коэффициентом упругости kf и коэффициентом cf амортизации и подвеской задних колес с коэффициентом упругости kr и коэффициентом cr амортизации (модель колебания подрессоренной части кузова транспортного средства), как приведено в качестве примера, например, на фиг. 3B. В этом случае уравнение движения центра тяжести кузова транспортного средства в вертикальном направлении и уравнение движения около центра тяжести кузова транспортного средства в продольном направлении выражается уравнениями 1, приведенными ниже.
[Уравнения 1]
 …(1b)
…(1b)
Следует отметить в данном документе, что Lf обозначает расстояние от центра тяжести до оси передних колес, Lr - расстояние от центра тяжести до оси задних колес, r - радиус колес, и h - высота центра тяжести над поверхностью дороги. В уравнении (1a) первое выражение и второе выражение являются компонентами усилия от оси передних колес, а третье выражение и четвертое выражение являются компонентами усилия от оси задних колес. В уравнении (1b) первое выражение является моментальным компонентом усилия от оси передних колес, а второе выражение является моментальным компонентом усилия от оси задних колес. Третье выражение в уравнении (1b) является моментальным компонентом усилия, который действует около центра тяжести кузова транспортного средства посредством крутящего момента T на колесе, прикладываемого к каждому из ведущих колес.
Вышеупомянутые уравнения (1a) и (1b) могут быть перезаписаны в форме уравнения состояния (линейной системы), которое выражено уравнением (2a), показанным ниже, при допущении, что смещения z и θ кузова транспортного средства и скорости их изменения dz/dt и dθ/dt составляют вектор X(t) переменной состояния.
 …(2a)
…(2a)
Следует отметить здесь, что X(t), A и B выражаются следующим образом.
[Уравнение 2]
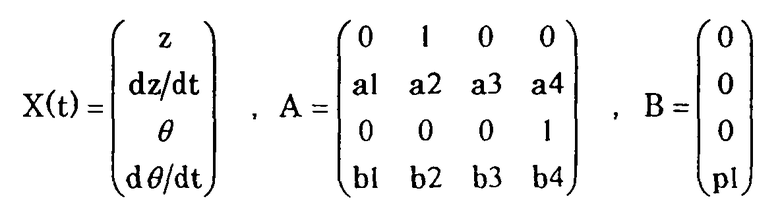
Соответствующие элементы a1-a4 и b1-b4 матрицы A задаются посредством получения коэффициентов z, θ, dz/dt и dθ/dt в уравнениях (1a) и (1b), соответственно. Т.е., al=-(kf+kr)/M, a2=-(cf+cr)/M, a3=-(kf·Lf-kr·Lr)/M, a4=-(cf·Lf-cr·Lr)/M, b1=-(Lf·kf-Lr·kr)/I, b2=-(Lf·cf-Lr·cr)/I, b3=-(Lf2·kf+Lr2·kr)/I, и b4=-(Lf2·cf+Lr2·cr)/I. Дополнительно, u(t) выражается как u(t)=T, и является входом системы, выраженной уравнением состояния (2a). Следовательно, согласно уравнению (1b), элемент p1 матрицы B выражается как p1=h/(I·r).
При условии, что U(t)=-K·X(t) … (2b) в уравнении (2a) состояния, уравнение (2a) состояния превращается в dX(t)/dt=(A-BK)·X(t)…(2c). Соответственно, значение u(t) крутящего момента для амортизации продольных/вертикальных колебаний определяется, если коэффициент K усиления для схождения X(t), а именно величины смещений в вертикальном направлении и продольном направлении и степени их изменения во времени, в 0 определяется, когда дифференциальное уравнение (2c) вектора X(t) переменной состояния решается с первоначальным значением Xo(t) из X(t), установленным как Xo(t)=(0, 0, 0, 0) (при допущении, что колебания не вызываются перед вводом крутящего момента). Значение, полученное преобразованием этого значения u(t) крутящего момента в единицу крутящего момента приведения в движение от двигателя, составляет компонент компенсации согласно управлению амортизацией колебаний.
Коэффициент K усиления может быть определен с помощью так называемой теории оптимального регулятора. Согласно этой теории известно, что, когда значение оценочной функции в квадратичной форме, т.е.,  …(3a) (диапазон объединения от 0 до ∞), минимизируется, X(t) стабильно сходится в уравнении (2a) состояния, и матрица K, которая минимизирует оценочную функцию J, задается уравнением:
…(3a) (диапазон объединения от 0 до ∞), минимизируется, X(t) стабильно сходится в уравнении (2a) состояния, и матрица K, которая минимизирует оценочную функцию J, задается уравнением:  Следует отметить здесь, что P - это решение уравнения Риккати:
Следует отметить здесь, что P - это решение уравнения Риккати:  Уравнение Риккати может быть решено согласно любому способу, известному в области линейной системы. Таким образом, определяется коэффициент K усиления.
Уравнение Риккати может быть решено согласно любому способу, известному в области линейной системы. Таким образом, определяется коэффициент K усиления.
Q и R в вышеупомянутой оценочной функции J и уравнении Риккати являются произвольно заданной полуположительно определенной симметричной матрицей и произвольно заданной положительно определенной симметричной матрицей соответственно. Эти матрицы являются весовыми матрицами оценочной функции J, которые определяются проектировщиком системы. Например, в случае рассматриваемой кинетической модели, Q и R задаются следующим образом.
[Уравнение 3]
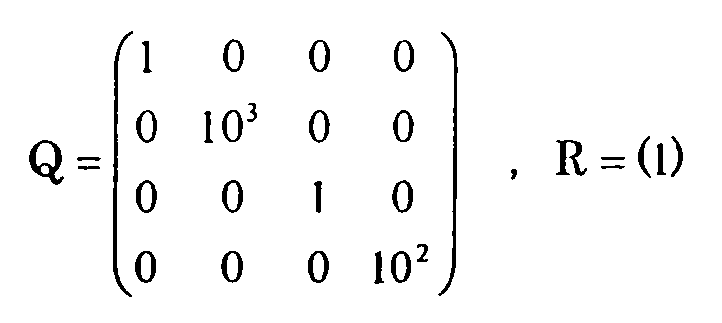
В уравнении (3), когда нормы (величины) отдельных из компонентов вектора состояния, например, dz/dt и dθ/dt заданы большими, чем нормы других компонентов, например z и θ соответственно, компоненты, нормы которых заданы большими, более устойчиво сходятся. Дополнительно, когда значения компонентов Q увеличиваются, значение вектора состояния быстро сводится к устойчивому значению, придающему значение переходной характеристике. Когда значение R увеличивается, количество потребляемой энергии уменьшается.
Например, как показано на фиг. 3C, модель, принимающая во внимание подпружиненную эластичность шин передних колес и шин задних колес (модель колебания подрессоренной/неподрессоренной части кузова транспортного средства), может быть применена в дополнение к конфигурации на фиг. 3B в качестве механической кинетической модели кузова транспортного средства в вертикальном направлении и продольном направлении. При условии, что шины передних колес и шины задних колес имеют коэффициент упругости ktf и коэффициент упругости ktr, соответственно, уравнение движения центра тяжести кузова транспортного средства в вертикальном направлении и уравнение движения центра тяжести кузова транспортного средства в продольном направлении выражаются уравнениями 4, показанными ниже, как понятно из фиг. 3C.
[Уравнения 4]

 …(4a)
…(4a)
 …(4b)
…(4b)
 …(4c)
…(4c)
 …(4d)
…(4d)
Следует отметить здесь, что xf обозначает величину смещения неподрессоренной части каждого из передних колес, xr - величину смещения неподрессоренной части каждого из задних колес, mf - неподрессоренную массу каждого из передних колес, и mr - неподрессоренную массу каждого из задних колес. Уравнения (4a) и (4b) составляют уравнение состояния, которое выражено уравнением (2a), как в случае фиг. 3B, где z, θ, xf, xr и их дифференциальные значения во времени служат в качестве вектора переменной состояния (однако следует отметить, что матрица A состоит из 8 линий и 8 столбцов, и что матрица B состоит из 8 линий и 1 столбца). Матрица K коэффициентов усиления для схождения величины вектора переменной состояния к 0 может быть определена согласно теории оптимального регулятора.
(Конфигурация части управления амортизацией колебаний)
Конфигурации управления части 52a управления амортизацией колебаний с прямой связью и части 52b управления амортизацией колебаний с обратной связью, каждая из которых вычисляет компонент U компенсации для упомянутого управления амортизацией продольных/вертикальных колебаний, показаны на фиг. 4A и 4B соответственно. Прежде всего, ссылаясь на фиг. 4A, в части 52a управления амортизацией колебаний с прямой связью на фиг. 2 требуемое значение крутящего момента приведения в движение из части 51 определения требуемого крутящего момента приведения в движение преобразуется в крутящий момент Two на колесе и затем вводится в кинетическую модель (расчетное значение крутящего момента на колесе, соответствующее величине операции торможения или величине операции руления, также может быть введено в нее). В кинетической модели вектор X(t) переменной состояния вычисляется посредством решения дифференциального уравнения (2a) с использованием входного значения Two крутящего момента. Затем вычисляется значение u(t), которое получается путем умножения вектора X(t) переменной состояния на коэффициент K, определенный таким образом, чтобы сводить вектор X(t) переменной состояния к 0 или минимальному значению, как описано выше. Значение u(t) преобразуется в компонент U(t) компенсации в единицах крутящего момента приведения в движение от двигателя и передается сумматору a1. Затем, в сумматоре a1 компонент U(t) компенсации вычитается из требуемого значения крутящего момента приведения в движение. Как также понятно из уравнений (1a) и (1b), система продольных/вертикальных колебаний кузова транспортного средства является резонансной системой. Значение вектора переменной состояния для произвольного ввода, по существу, состоит только из частотных компонентов в диапазоне, имеющем определенную спектральную характеристику, в основном, около собственной частоты колебаний (приблизительно 1-5 Гц) системы. Таким образом, такой компонент требуемого крутящего момента приведения в движение, который соответствует собственной частоте колебаний, а именно такой компонент требуемого крутящего момента приведения в движение, который вызывает продольные/вертикальные колебания в кузове транспортного средства, уменьшается или устраняется посредством применения конфигурации, в которой U(t) вычитается из требуемого крутящего момента приведения в движение. В результате, продольные/вертикальные колебания в кузове транспортного средства амортизируются.
Конфигурация части 52b управления амортизацией колебаний с обратной связью, показанная на фиг. 4B, идентична конфигурации части управления амортизацией колебаний с прямой связью за исключением того, что вводится крутящий момент Tw на колесе (его расчетное значение), фактически прикладываемый к каждому из колес. Однако, при вводе крутящий момент Tw на колесе может быть умножен на коэффициент FB усиления системы управления с обратной связью (коэффициент для регулирования равновесия между долей требуемого водителем крутящего момента Tw0 на колесе в кинетической модели и долей расчетного значения Tw крутящего момента на колесе в кинетической модели). Кроме того, как показано на фиг. 2, компонент компенсации в качестве выходного сигнала части управления амортизацией колебаний с обратной связью накладывается на требуемый крутящий момент приведения в движение посредством сумматора a2 через устройство 52d регулирования коэффициента усиления системы управления. Выходная мощность приведения в движение от двигателя регулируется так, чтобы амортизировать продольные/вертикальные колебания, возникающие в результате возмущений крутящего момента на колесе. Кроме того, в случае, когда выполняется LPF-обработка на входе части управления амортизацией колебаний с обратной связью, расчетное значение крутящего момента на колесе, имеющее частоту, ограниченную значением, равным или меньшим, чем частота среза при LPF-обработке, вводится в кинетическую модель.
Идеально было бы снабдить каждое из колес датчиком крутящего момента и фактически обнаруживать на колесе значение крутящего момента, фактически прикладываемого к каждому из колес, которое вводилось бы на фиг. 4B. Однако затруднительно снабдить каждое из колес традиционного транспортного средства датчиком крутящего момента. Таким образом, в примере, показанном на фиг. 4B, расчетное значение крутящего момента на колесе, рассчитанное из других обнаруживаемых значений в движущемся транспортном средстве с помощью устройства 52c оценки крутящего момента на колесе (фиг. 2), используется как входное возмущение крутящего момента на колесе. Расчетное значение Tw крутящего момента на колесе типично может рассчитываться как  …(5) с помощью дифференциала скорости ω вращения колеса во времени или значения r·ω скорости вращения колеса, которое получается от каждого из датчиков скорости колеса для ведущих колес. Здесь следует отметить, что M обозначает массу транспортного средства, и что r обозначает радиус колес. [При условии, что сумма сил приведения в движение, сформированных ведущими колесами в местах поверхности дороги, где ведущие колеса опираются на землю, равна силе MG приведения в движение (G обозначает ускорение) всего транспортного средства, крутящий момент Tw на колесе задается уравнением:
…(5) с помощью дифференциала скорости ω вращения колеса во времени или значения r·ω скорости вращения колеса, которое получается от каждого из датчиков скорости колеса для ведущих колес. Здесь следует отметить, что M обозначает массу транспортного средства, и что r обозначает радиус колес. [При условии, что сумма сил приведения в движение, сформированных ведущими колесами в местах поверхности дороги, где ведущие колеса опираются на землю, равна силе MG приведения в движение (G обозначает ускорение) всего транспортного средства, крутящий момент Tw на колесе задается уравнением:  …(5a). Ускорение G транспортного средства задается уравнением:
…(5a). Ускорение G транспортного средства задается уравнением:  …(5b) с использованием дифференциального значения скорости r·ω колеса. Следовательно, крутящий момент на колесе рассчитывается так, как выражено уравнением (5)]. Расчетное значение крутящего момента на колесе может быть рассчитано из скорости вращения двигателя или скорости вращения трансмиссии вместо расчета из скорости колеса. Этот случай также находится в рамках изобретения.
…(5b) с использованием дифференциального значения скорости r·ω колеса. Следовательно, крутящий момент на колесе рассчитывается так, как выражено уравнением (5)]. Расчетное значение крутящего момента на колесе может быть рассчитано из скорости вращения двигателя или скорости вращения трансмиссии вместо расчета из скорости колеса. Этот случай также находится в рамках изобретения.
(ii) Конфигурация для недопущения формирования тепла электродвигателя дроссельной заслонки и его проводника
В устройстве управления согласно варианту осуществления изобретения, как уже описано, предусмотрено устройство 52d регулирования коэффициента усиления системы управления для регулирования коэффициента усиления для компонента компенсации в качестве выходного сигнала части управления амортизацией колебаний с обратной связью, чтобы пресекать формирование тепла электродвигателя дроссельной заслонки и его проводника. Устройство 52d регулирования коэффициента усиления рассчитывает температуру электродвигателя или его проводника на основе величины изменения в степени открытия дроссельной заслонки и уменьшает коэффициент усиления для компонента компенсации согласно управлению амортизацией колебаний, когда расчетная температура является высокой. В этом отношении было обнаружено в ходе изучений/разработки заявителем изобретения и т.п., что температура проводника электродвигателя может быть рассчитана как функция частоты и амплитуды степени открытия дроссельной заслонки (согласно этому знанию температура проводника электродвигателя увеличивается, когда каждая величина из частоты и амплитуды степени открытия дроссельной заслонки увеличивается). Таким образом, в этом варианте осуществления изобретения подготавливается карта, предоставляющая расчетное значение температуры проводника электродвигателя при использовании частоты и амплитуды величины изменения в степени открытия дроссельной заслонки в качестве переменных. Температура проводника электродвигателя затем рассчитывается, с помощью карты, из мгновенно определенных значений частоты и амплитуды величины изменения в степени открытия дроссельной заслонки. Когда расчетная температура выше, чем заданное значение, коэффициент усиления для компонента компенсации уменьшается, чтобы не допускать дальнейшего роста температуры.
Фиг. 5A показывает конфигурацию этого устройства регулирования в форме блок-схемы управления. Обращаясь к фиг. 5A, как также приведено в качестве примера на фиг. 2, требуемая степень открытия дроссельной заслонки (которая может быть фактической степенью открытия дроссельной заслонки или целевым значением или фактическим значением углового положения корпуса клапана) вводится в устройство 52d регулирования коэффициента усиления из части 54 управления степенью открытия дроссельной заслонки. Затем компонент колебания, получающийся из компонента компенсации, полученного частью управления амортизацией колебаний, сначала извлекается из этой требуемой степени открытия дроссельной заслонки (степень открытия дроссельной заслонки включает в себя компонент, эквивалентный изменению в требуемом крутящем моменте приведения в движение, который соответствует запросу ускорения/торможения транспортного средства, выданному водителем, автоматическим устройством управления движением или т.п.). Процесс извлечения может выполняться, например, посредством пропускания требуемой степени открытия дроссельной заслонки через высокочастотный фильтр (HPF) (HPF может выполняться согласно любому известному типу аналогового или цифрового способа процесса фильтрации). При HPF-обработке значение требуемой степени открытия дроссельной заслонки смещается от состояния, в котором высокочастотный компонент и низкочастотный компонент накладываются друг на друга, как указано посредством (I) на фиг. 5A, в состояние только высокочастотного компонента, указанного посредством (II) на фиг. 5A, а именно компонент колебания, соответствующий частым изменениям, которые вызывают увеличение тока, подаваемого на электродвигатель дроссельной заслонки.
После HPF-обработки требуемого значения степени открытия дроссельной заслонки, частота и амплитуда извлеченного компонента колебания затем определяются (частью определения частоты/амплитуды). Частота и амплитуда могут быть определены в любой известной форме. В качестве примера, частота и амплитуда величины изменения требуемого значения степени открытия дроссельной заслонки могут быть определены посредством измерения времени от момента времени, когда требуемое значение степени открытия дроссельной заслонки (после HPF-обработки), которое изменяется со временем, как показано на фиг. 5B, пересекает определенную нулевую точку, до момента времени, когда требуемое значение степени открытия дроссельной заслонки пересекает последующую нулевую точку и максимальное значение (абсолютное значение) в это время. (Чтобы быть более точным, определяются частота и амплитуда во времени от момента времени, когда требуемое значение степени открытия дроссельной заслонки пересекает определенную нулевую точку, до момента времени, когда требуемое значение степени открытия дроссельной заслонки пересекает последующую нулевую точку). Более конкретно, требуемое значение степени открытия дроссельной заслонки (после HPF-обработки) последовательно вводится в каждую из части хранения максимального значения и части определения нулевой точки, как показано на фиг. 5A. Часть определения нулевой точки предоставляет командный сигнал сброса/вывода таймеру и части хранения максимального значения каждый раз, когда требуемое значение степени открытия дроссельной заслонки после HPF-обработки пересекает нулевую точку. При приеме командного сигнала сброса/вывода от части определения нулевой точки таймер начинает измерение времени. При приеме командного сигнала сброса/вывода впоследствии таймер выводит измеренное время на настоящий момент (которое эквивалентно полупериоду требуемого значения степени открытия дроссельной заслонки на фиг. 5B), сбрасывает время, измеренное до настоящего момента, и повторно начинает отсчет времени с 0. Часть вычисления частоты затем вычисляет частоту требуемого значения степени открытия дроссельной заслонки из выходного значения измеренного времени. С другой стороны, часть хранения максимального значения всегда сохраняет максимальное значение абсолютного значения требуемого значения степени открытия дроссельной заслонки, которые поступают последовательно. Однако при приеме командного сигнала сброса/вывода от части определения нулевой точки, часть хранения максимального значения выводит максимальное значение, сохраненное на настоящий момент, и сбрасывает сохраненное значение максимального значения, сохраненного на настоящий момент, в 0. Следует отметить здесь, что значение, выведенное из части хранения максимального значения, эквивалентно амплитуде с момента времени, когда требуемое значение степени открытия дроссельной заслонки пересекает определенную нулевую точку, до момента времени, когда требуемое значение степени открытия дроссельной заслонки пересекает последующую нулевую точку, как показано на фиг. 5B.
Когда частота и амплитуда требуемой степени открытия дроссельной заслонки определяются таким образом, температура проводника электродвигателя рассчитывается с помощью карты, как приведено в качестве примера на фиг. 5C. Как уже упомянуто, температура проводника электродвигателя может определяться с помощью частоты и амплитуды требуемой степени открытия дроссельной заслонки в качестве параметров. Следовательно, карта соответствия может быть подготовлена заранее, например, путем измерения температуры проводника электродвигателя посредством датчика температуры, такого как термопара или т.п., при одновременном изменении частоты и амплитуды требуемой степени открытия дроссельной заслонки различными способами в предполагаемом диапазоне при производстве/сборке транспортного средства. Как уже упомянуто, температура проводника электродвигателя растет, когда частота требуемой степени открытия дроссельной заслонки увеличивается или когда амплитуда требуемой степени открытия дроссельной заслонки увеличивается. В соответствии на фиг. 5C значение температуры растет по направлению к верхней правой области. Дополнительно, карта соответствия на фиг. 5C, можно сказать, может быть базой данных для определения величины регулирования управления компенсацией крутящего момента в соответствии с частотой и амплитудой. Управление для уменьшения величины регулирования степени открытия дроссельной заслонки, когда каждая из частоты и амплитуды увеличивается, выполняется на основе этой карты соответствия. То есть, как показано в этой карте соответствия на фиг. 5C, превышена или нет пороговая температура Tlimit, зависит от обоих условий, а именно от частоты и амплитуды. Например, обращаясь здесь к случаю, где амплитуда - это "A0", пороговая температура Tlimit превышается только в диапазоне наивысших частот (столбец с левой стороны на фиг. 5C). С другой стороны, обращаясь к случаю, где частота - это "F0", пороговая температура Tlimit превышается только в диапазоне наивысших амплитуд (линия с верхней стороны на фиг. 5C). Таким образом, одно из условия частоты и условия амплитуды изменяется на основе другого. Более конкретно, управление может выполняться так, что условие, относящееся к частоте, ужесточается, частота, при которой регулировка степени открытия дроссельной заслонки ограничивается, уменьшается, когда амплитуда увеличивается, и управление может выполняться так, что условие, относящееся к амплитуде, ужесточается, амплитуда, при которой регулировка степени открытия дроссельной заслонки ограничивается, уменьшается, так как частота увеличивается. Другими словами, температура проводника электродвигателя оценивается как растущая, когда частота степени открытия дроссельной заслонки увеличивается, и когда амплитуда степени открытия дроссельной заслонки увеличивается. Следовательно, как показано на фиг. 5C, заданное значение частоты, дающее пороговую температуру Tlimit, уменьшается, когда амплитуда увеличивается, и заданное значение амплитуды, дающее пороговую температуру Tlimit, уменьшается, когда частота увеличивается.
Когда температура проводника электродвигателя оценивается с помощью частоты и амплитуды требуемой степени открытия дроссельной заслонки, как описано выше, часть определения формирования тепла определяет, выше или нет расчетная температура, чем заданная пороговая температура Tlimit. Когда расчетная температура Test выше, чем пороговая температура Tlimit, а именно когда установлено соотношение:  …(A), коэффициент усиления уменьшается. В принципе, коэффициент усиления должен всегда уменьшаться в течение периода, в котором расчетная температура выше, чем пороговая температура Tlimit, а именно в течение периода, в котором выполняется условие (A). Однако, как описано выше, в случае, когда частота и амплитуда, которые определяются в интервалах полупериода колебаний требуемой степени открытия дроссельной заслонки, используются в качестве параметров для оценки температуры, определение по условию (A) сильно расходится. Соответственно, в то время как определение по условию (A) выполняется в интервалах полупериода колебаний требуемой степени открытия дроссельной заслонки, которое последовательно вводится, уменьшение коэффициента усиления может начинаться, когда расчетная температура становится выше, чем пороговая температура Tlimit, хотя бы один раз. Однако уменьшение коэффициента усиления может начинаться, только когда условие (A) выполняется заданное число (число заданных полупериодов) раз в заданном периоде или чаще, или когда условие (A) последовательно выполняется заданное число раз или более (с этой целью в части определения формирования тепла может быть предоставлен счетчик для подсчета числа выполнений условия (A)). Дополнительно, процесс уменьшения коэффициента усиления может быть отменен по истечении заданного времени с его начала.
…(A), коэффициент усиления уменьшается. В принципе, коэффициент усиления должен всегда уменьшаться в течение периода, в котором расчетная температура выше, чем пороговая температура Tlimit, а именно в течение периода, в котором выполняется условие (A). Однако, как описано выше, в случае, когда частота и амплитуда, которые определяются в интервалах полупериода колебаний требуемой степени открытия дроссельной заслонки, используются в качестве параметров для оценки температуры, определение по условию (A) сильно расходится. Соответственно, в то время как определение по условию (A) выполняется в интервалах полупериода колебаний требуемой степени открытия дроссельной заслонки, которое последовательно вводится, уменьшение коэффициента усиления может начинаться, когда расчетная температура становится выше, чем пороговая температура Tlimit, хотя бы один раз. Однако уменьшение коэффициента усиления может начинаться, только когда условие (A) выполняется заданное число (число заданных полупериодов) раз в заданном периоде или чаще, или когда условие (A) последовательно выполняется заданное число раз или более (с этой целью в части определения формирования тепла может быть предоставлен счетчик для подсчета числа выполнений условия (A)). Дополнительно, процесс уменьшения коэффициента усиления может быть отменен по истечении заданного времени с его начала.
Конкретный процесс уменьшения коэффициента усиления может выполняться согласно любому способу, пока величина компонента компенсации уменьшается. Например, в случае, когда устройство 52d регулирования коэффициента усиления сконфигурировано, чтобы предоставлять сумматору a2 значение, полученное путем умножения компонента U компенсации при управлении амортизацией колебаний на коэффициент λ усиления, а именно λ·U…(6), коэффициент λ усиления обычно устанавливается как λ=1…(7). Однако, в случае, когда коэффициент усиления уменьшается на основе выполнения упомянутого условия (A), коэффициент λ усиления может быть установлен как  …(7a). Дополнительно, в качестве другого режима, значение коэффициента λ усиления может также быть установлено как функция расчетной температуры.
…(7a). Дополнительно, в качестве другого режима, значение коэффициента λ усиления может также быть установлено как функция расчетной температуры.
Также, в случае, когда LPF-обработка выполняется для входного сигнала устройства управления амортизацией колебаний с обратной связью, как описано выше, вместо уменьшения коэффициента усиления, а также в случае, когда коэффициент усиления уменьшается, LPF-обработка может выполняться, когда расчетная температура проводника, которая рассчитывается на основе частоты и амплитуды степени открытия дроссельной заслонки, становится выше, чем пороговая температура. Дополнительно, как и в предыдущем случае, температура корпуса электродвигателя дроссельной заслонки может рассчитываться на основе частоты и амплитуды степени открытия дроссельной заслонки, и коэффициент усиления может уменьшаться, или LPF-обработка может выполняться на основе расчетной температуры.
Таким образом, согласно вышеупомянутой конфигурации, когда возникает ситуация, в которой большой ток (т.е. с большой амплитудой) подается на электродвигатель чаще, чем обычно (т.е. с высокой частотой) в соответствии с состоянием колебательных изменений в степени открытия дроссельной заслонки при выполнении управления амортизацией колебаний посредством управления выходной мощностью приведения в движение, часть компонента компенсации управления амортизацией колебаний временно уменьшается, и электродвигатель или его проводник может быть защищен от роста температуры. Соответственно, может быть предотвращено снижение эффекта амортизации колебаний, получающееся в результате уменьшения скорости отклика дроссельной заслонки. В этом отношении, компонент компенсации управления амортизацией колебаний частично или временно уменьшается, как описано выше. Следовательно, управляющая работа при управлении амортизацией колебаний не должна, по существу, ослабевать.
Предшествующее описание было дано относительно варианта осуществления изобретения, но в этот вариант осуществления изобретения может быть легко внесено множество корректировок и множество модификаций специалистами в данной области техники. Очевидно, что изобретение не ограничивается исключительно вариантом осуществления, приведенным в качестве примера выше, а применимо к различным устройствам без отступления от концепции изобретения.
Например, расчетное значение крутящего момента на колесе в упомянутом варианте осуществления изобретения рассчитывается из скорости колеса. Однако расчетное значение крутящего момента на колесе может быть рассчитано из параметра, отличного от скорости колеса. Дополнительно, управление амортизацией колебаний в вышеупомянутом варианте осуществления изобретения использует теорию оптимального регулятора, основанную на кинетической модели подрессоренной части, или кинетическую модель подрессоренной/неподрессоренной части в качестве кинетической модели. Концепция изобретения также применяется к устройству управления, принимающему кинетическую модель, отличную от представленной в данном документе, или устройству управления, которое амортизирует колебания согласно способу управления, отличному от теории оптимального регулятора, пока используется крутящий момент на колесе. В этом случае устройство управления также принадлежит к области использования изобретения. Например, также уместно обнаруживать продольные/вертикальные колебания кузова транспортного средства из выходного значения G-датчика в транспортном средстве или любого другого датчика, выполненного с возможностью обнаруживать продольные/вертикальные колебания кузова транспортного средства, и регулировать крутящий момент приведения в движение или степень открытия дроссельной заслонки, чтобы ограничивать этот компонент продольных/вертикальных колебаний кузова транспортного средства. Дополнительно, диапазон резонансных частот колебаний кузова транспортного средства известен до определенной степени. Таким образом, также уместно извлекать компонент отклонения крутящего момента на колесе в этом диапазоне и выполнять управление крутящим моментом приведения в движение или управление степенью открытия дроссельной заслонки, чтобы уменьшать или уравновешивать компонент отклонения.
Дополнительно, в упомянутом примере температура проводника электродвигателя рассчитывается посредством определения частоты и амплитуды степени открытия дроссельной заслонки. Однако в первом случае колебания степени открытия дроссельной заслонки получаются в результате колебаний компонента компенсации. Следовательно, также уместно подготавливать карту расчетной температуры проводника электродвигателя с использованием частоты и амплитуды компонента компенсации управления амортизацией колебаний в качестве параметров, и определять, со ссылкой на карту, необходимость выполнения процесса уменьшения коэффициента усиления. Кроме того, в упомянутом варианте осуществления изобретения коэффициент усиления уменьшается, или LPF-обработка выполняется относительно компонента компенсации части управления амортизацией колебаний с обратной связью. Однако аналогичная обработка может также выполняться для компонента компенсации согласно части управления амортизацией колебаний с прямой связью.
Кроме того, температура вышеупомянутого электродвигателя или его проводника может непосредственно определяться температурным датчиком, таким как термопара или т.п. Процесс уменьшения коэффициента усиления или LPF-обработка, как описано выше, могут выполняться, когда температура достигает порогового значения. Дополнительно, в этом случае, когда температура не падает или дополнительно растет, чтобы достигать второго порогового значения, более высокого, чем упомянутое пороговое значение, несмотря на выполнение процесса уменьшения коэффициента усиления или LPF-обработки, работа электродвигателя дроссельной заслонки может быть (временно) остановлена для того, чтобы снизить температуру электродвигателя или его проводника. (Корпус клапана возвращается в нейтральное положение пружиной. В этом процессе объем всасываемого воздуха становится равным объему, допустимому в случае, когда корпус клапана находится в нейтральном положении, и управление крутящим моментом выполняется посредством регулирования момента зажигания, объема впрыска топлива или т.п.). Согласно этой конфигурации ожидается восстановление скорости отклика корпуса клапана электродвигателя дроссельной заслонки.
Кроме того, температура электродвигателя или его проводника может рассчитываться на основе частоты и/или амплитуды выходного значения G-датчика в транспортном средстве или любого другого датчика, который может определять продольные/вертикальные колебания кузова транспортного средства. В этом случае, с увеличением частоты и/или амплитуды выходного значения датчика величина изменения степени открытия дроссельной заслонки или частота изменения степени открытия дроссельной заслонки увеличивается, и температура электродвигателя или его проводника оценивается как растущая.
В вышеупомянутом варианте осуществления механизм работы корпуса клапана дроссельной заслонки спроектирован так, что корпус клапана поворачивается электродвигателем дроссельной заслонки. Однако механизм работы может также быть спроектирован так, что корпус клапана приводится в действие любым другим приводом, например, электромагнитным соленоидом или т.п. Следует понимать, что этот случай также относится к области действия изобретения.
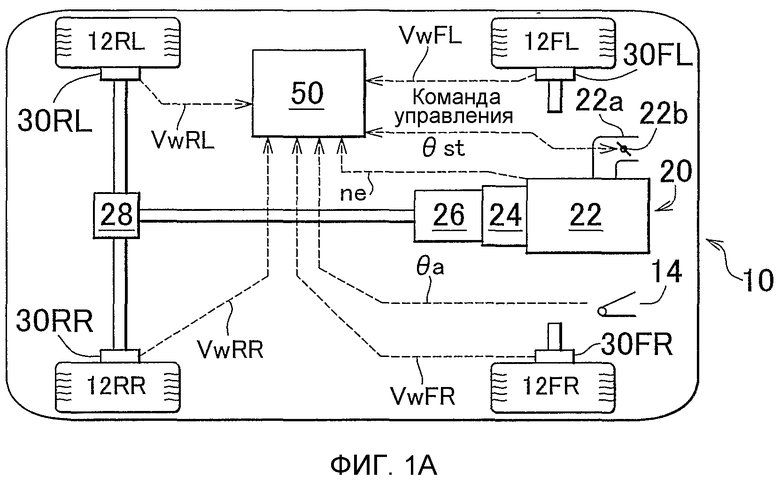
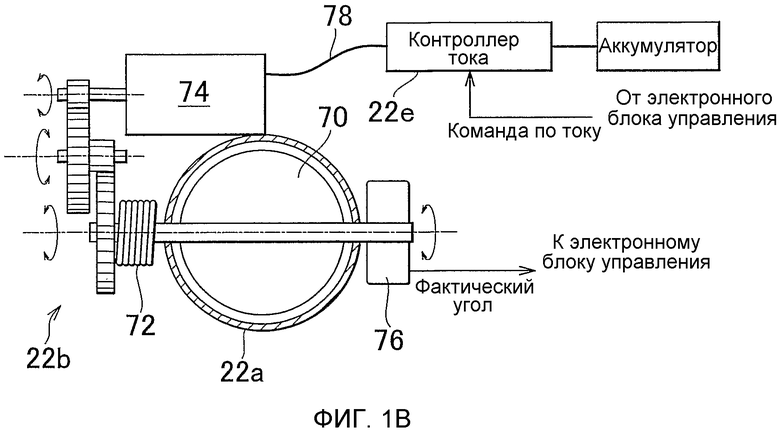
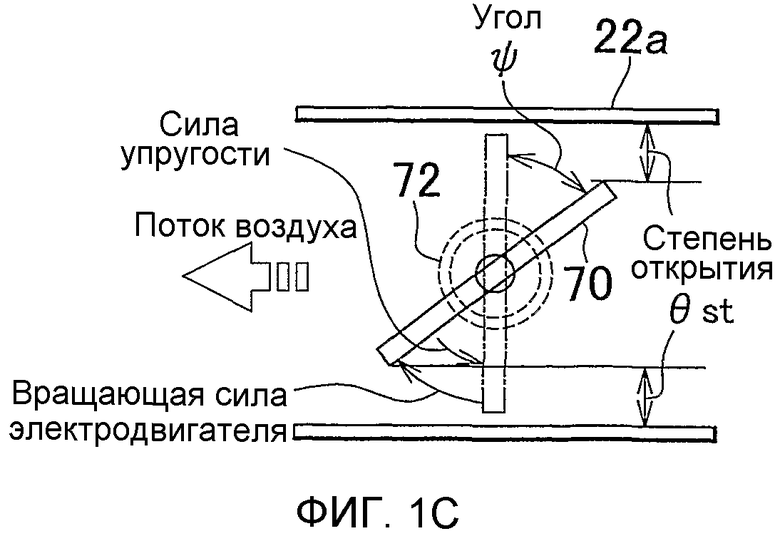
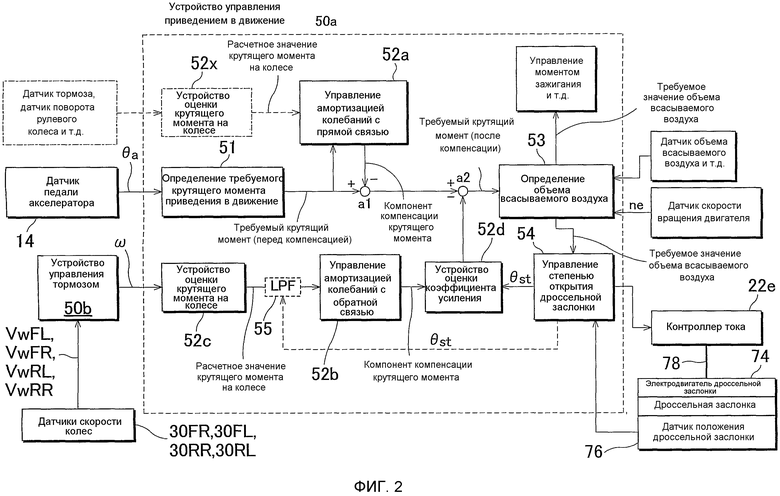
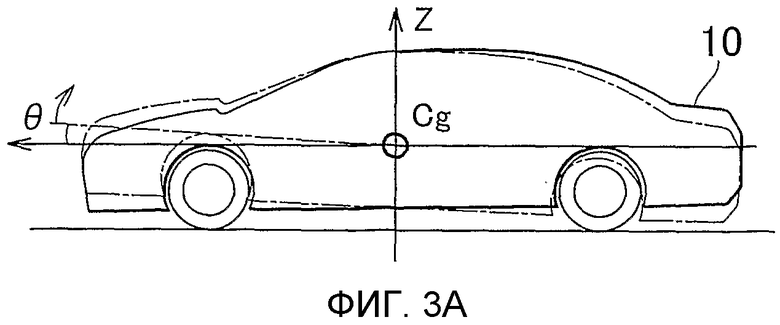
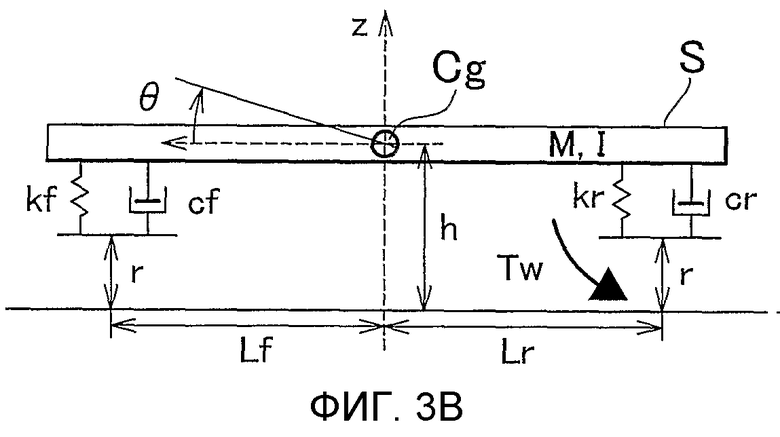
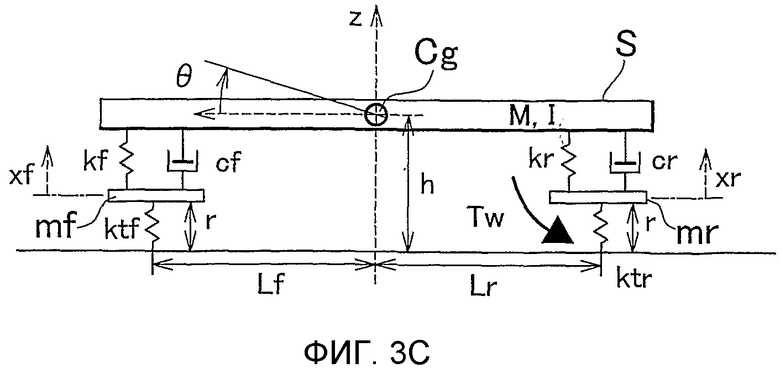
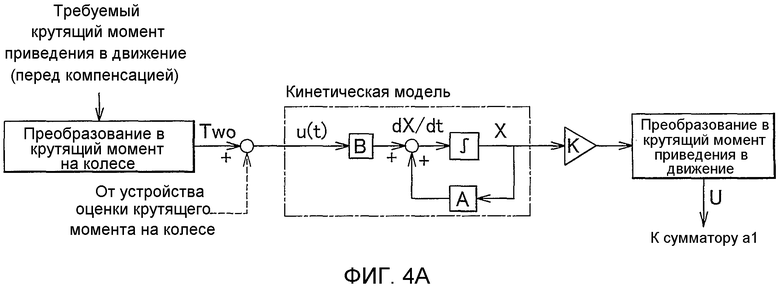
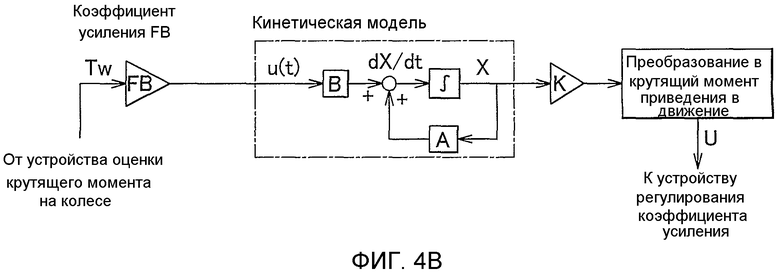
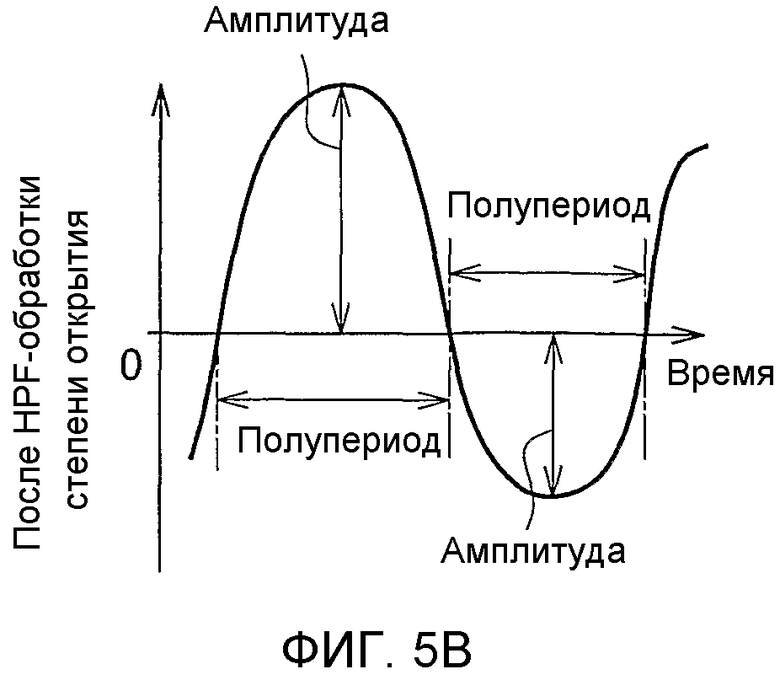
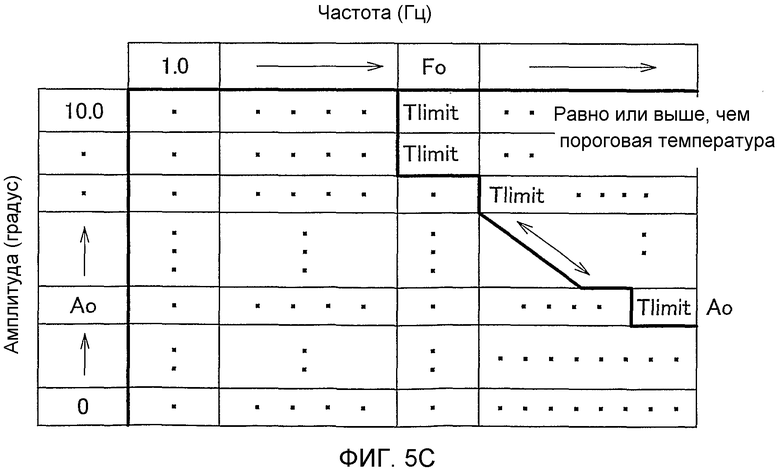
Группа изобретений относится к управлению амортизацией колебаний на транспортном средстве. Устройство управления амортизацией колебаний в транспортном средстве содержит часть управления амортизацией колебаний, которая управляет крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний на основе крутящего момента на колесе, действующего на каждое колесо транспортного средства. Устройство также содержит часть регулирования компонента компенсации, которая изменяет величину, по меньшей мере, части компонента компенсации для компенсации крутящего момента на колесе для управления амортизацией колебаний, которая вычисляется частью управления амортизацией колебаний, на основе температуры электродвигателя дроссельной заслонки для регулирования степени открытия дроссельной заслонки двигателя. Транспортное средство содержит упомянутое устройство управления амортизацией колебаний. Решение направлено на уменьшение колебаний транспортного средства. 2 н. и 12 з.п. ф-лы, 12 ил.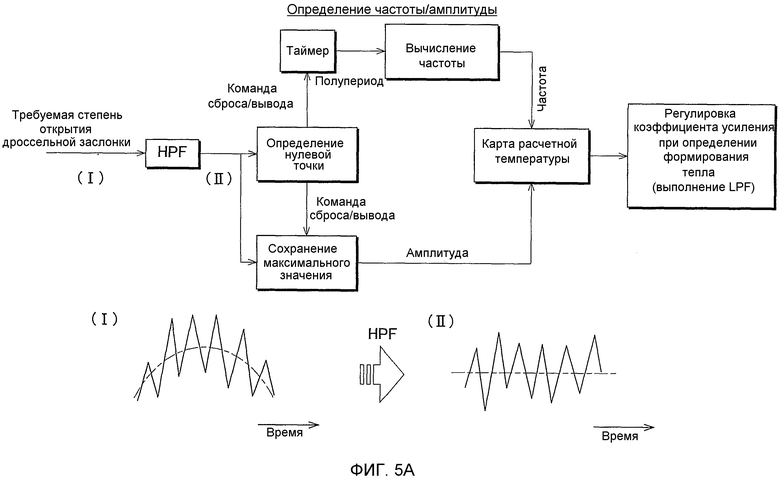
1. Устройство управления амортизацией колебаний в транспортном средстве, которое выполняет управление амортизацией колебаний для амортизации продольных колебаний или вертикальных колебаний транспортного средства посредством управления выходной мощностью приведения в движение транспортного средства, содержащее:
часть управления амортизацией колебаний, которая управляет крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний на основе крутящего момента на колесе, действующего на каждое колесо транспортного средства, который формируется в месте поверхности дороги, где опирается колесо, отличающееся тем, что оно содержит
часть регулирования компонента компенсации, которая изменяет величину, по меньшей мере, части компонента компенсации для компенсации крутящего момента на колесе для управления амортизацией колебаний, которая вычисляется частью управления амортизацией колебаний, на основе температуры электродвигателя дроссельной заслонки для регулирования степени открытия дроссельной заслонки двигателя.
2. Устройство по п.1, отличающееся тем, что часть регулирования компонента компенсации рассчитывает температуру проводника для подачи тока на электродвигатель дроссельной заслонки для регулирования степени открытия дроссельной заслонки на основе величины изменения в степени открытия дроссельной заслонки, и
часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации, когда температура проводника становится выше заданного значения.
3. Устройство по п.2, отличающееся тем, что часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации для компенсирования крутящего момента на колесе, когда частота или амплитуда величины изменения в степени открытия дроссельной заслонки становится равной заданному значению или превышает его.
4. Устройство по п.3, отличающееся тем, что часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации для компенсирования крутящего момента на колесе, когда появление частоты или амплитуды величины изменения в степени открытия дроссельной заслонки, равной или превышающей заданное значение, наблюдается хотя бы один раз.
5. Устройство по п.3, отличающееся тем, что часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации для компенсирования крутящего момента на колесе, когда появление частоты или амплитуды величины изменения в степени открытия дроссельной заслонки, равной или превышающей заданное значение, наблюдается больше заданного числа раз, последовательно или в течение заданного периода.
6. Устройство по любому из пп.1-5, отличающееся тем, что часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации посредством уменьшения коэффициента усиления для компонента компенсации.
7. Устройство по любому из пп.1-5, отличающееся тем, что часть регулирования компонента компенсации уменьшает величину, по меньшей мере, части компонента компенсации, устраняя ту часть значения крутящего момента на колесе, введенную в часть управления амортизацией колебаний или компонент компенсации, которая имеет частоту, превышающую заданную частоту.
8. Устройство по любому из пп.1-5, отличающееся тем, что часть управления амортизацией колебаний включает в себя:
часть управления амортизацией колебаний с прямой связью, которая вычисляет компонент компенсации для управления крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний, вызванных крутящим моментом на колесе, сформированным посредством запроса ускорения/торможения транспортного средства или запроса поворота транспортного средства, и
часть управления амортизацией колебаний с обратной связью, которая вычисляет компонент компенсации для управления крутящим моментом приведения в движение от двигателя таким образом, чтобы ограничивать амплитуду продольных колебаний или вертикальных колебаний, вызванных крутящим моментом на колесе, фактически прикладываемым к каждому колесу,
при этом часть регулирования компонента компенсации изменяет величину, по меньшей мере, части компонента компенсации, которая вычисляется частью управления амортизацией колебаний с обратной связью.
9. Устройство по любому из пп.1-5, отличающееся тем, что температура привода дроссельной заслонки вычисляется на основе требуемой степени открытия дроссельной заслонки или вычисляется на основе фактической степени открытия дроссельной заслонки.
10. Транспортное средство, отличающееся тем, что оно содержит устройство управления амортизацией колебаний по п.1.
11. Транспортное средство по п.10, отличающееся тем, что устройство управления амортизацией колебаний уменьшает величину изменения в степени открытия дроссельной заслонки, когда температура привода дроссельной заслонки растет.
12. Транспортное средство по п.10 или 11, отличающееся тем, что оно дополнительно содержит датчик температуры, предусмотренный на приводе дроссельной заслонки или его проводнике, так что осуществляется определение температуры привода дроссельной заслонки или его проводника посредством датчика температуры.
13. Транспортное средство по п.10 или 11, отличающееся тем, что оно выполнено с возможностью определения значения, представляющего скорость отклика привода дроссельной заслонки, включая разность между значением требуемой степени открытия дроссельной заслонки и значением фактической степени открытия дроссельной заслонки, и выполнено с возможностью расчета температуры привода дроссельной заслонки на основе значения, представляющего скорость отклика привода дроссельной заслонки.
14. Транспортное средство по п.10 или 11, отличающееся тем, что устройство управления амортизацией колебаний уменьшает величину изменения степени открытия дроссельной заслонки, когда температура привода дроссельной заслонки становится равной первой температуре, и останавливает работу дроссельной заслонки, когда температура привода дроссельной заслонки становится равной второй температуре, которая выше первой температуры.
| US 2005049761 А1, 03.03.2005 | |||
| Способ подготовки поверхности металлических фитингов к склеиванию с элементами из композиционных материалов | 2023 |
|
RU2804219C1 |
| JP 2004168148 А, 17.06.2004 | |||
| KR 100262572 В1, 01.08.2000 | |||
| DE 19860762 А1, 06.07.2000. | |||

