Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной промышленности для непрерывного контроля по глубине и латерали местоположения бурового инструмента при бурении скважин с морской буровой платформы на шельфе с использованием сигнала, излучаемого инструментом в процессе бурения вертикальных, наклонных и горизонтальных скважин.
Известен способ определения местоположения бурового инструмента в процессе бурения путем улучшения сейсмического сигнала, создаваемого буровым инструментом, с использованием параметров бурения, по которому для повышения отношения сигнал/шум в качестве пилот-сигнала используют сигнал, создаваемый буровым инструментом, измеряют взаимно коррелированные друг с другом пилот-сигнал и сейсмические сигналы, переданные в грунт и отраженные от пластов, при этом пилот-сигнал и сейсмические сигналы могут быть обращены из свертки с получением, таким образом, дорожек стандартных сейсмограмм, на которых сигнал искажен шумом, одновременно с этими сигналами получают связанные с ними параметры бурения. Для обеспечения улучшенного отношения сигнала к шуму и более четкого разделения сигнала и шума пилот-сигнал и сейсмические сигналы, полученные многократными измерениями для одного и того же диапазона глубин, частично или полностью суммируют с весом на основе одного или более параметров бурения или их комбинации. Для измерения указанных сигналов служит ряд приемников, образующих сейсмическую линию (Патент РФ №2233001, МПК G01V 1/28, 1/40, Е21В 47/12, опубл. 20.07.2004 г.).
Недостатком способа является необходимость использования для повышения отношения сигнал/шум пилот-сигнала и учета параметров бурения, что не всегда возможно особенно при бурении поисковых и разведочных скважин.
Известен способ определения местоположения бурового инструмента в процессе бурения, позволяющий улучшить сейсмический сигнал, создаваемый буровым инструментом, обеспечить непрерывную корректировку двухмерного и трехмерного сейсмического изображения по глубине при бурении скважины с использованием сейсмической информации о скорости, в соответствии с которым каждое новое изображение, точно привязанное к моменту времени, когда были получены результаты из скважины, позволяет лучше производить определение горизонтов, находящихся ниже головки бура, и, следовательно, значительно более точно управлять последующими фазами бурения, при этом сейсмическое изображение может быть "разрезом" в случае двухмерного "массива данных или "объемом" в случае трехмерного массива данных при использовании всей информации, касающейся скорости, которая может быть получена из скважины, для получения во время бурения скважины сейсмического изображения по шкале глубины путем выполнения многократной корректировки диапазона относительной скорости (Патент РФ №2176405, МПК G01V 1/40, 27.11.2001 г.).
Недостатком способа является обязательное наличие достаточно точной информации о скоростях распространения сейсмических волн в геологической среде до глубины предполагаемого бурения скважины.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является способ определения местоположения бурового инструмента в процессе бурения, заключающийся в том, что осуществляют одновременную синхронную регистрацию сейсмических колебаний на дневной поверхности с помощью сейсмической антенны, состоящей из группы трехкомпонентных сейсмодатчиков, возбуждаемых буровым инструментом в процессе бурения, при этом периодически из регистрационных записей всех пар точек сейсмической антенны посредством вычисления спектра функции когерентности выделяют квазимонохроматические сигналы, возбуждаемые в забое вращением бурового инструмента, определяют на выделенных частотах временные задержки между всеми парами точек регистрации на дневной поверхности, перебором местоположения бурового инструмента в пространстве, ограниченным величиной приращения длины бурильной колонны, и перебором скорости распространения упругих волн определяют координаты местоположения бурового инструмента во времени в процессе бурения, контролируют определение координат местоположения инструмента путем сравнения фактической длины опущенной колонны с интегральной длиной, вычисленной по траектории ствола, и таким образом контролируют процесс бурения скважины во времени (Патент РФ №2305298, МПК G01V 1/28, 19.06.2006 г.).
Недостатками известного способа является невозможность определения местоположения бурового инструмента при осуществлении бурения с буровых морских платформ и низкая точность определения местоположения бурового инструмента.
Техническим результатом изобретения является обеспечение возможности определения местоположения бурового инструмента при осуществлении бурения с буровых морских платформ и повышение точности определения местоположения бурового инструмента.
Технический результат достигается за счет того, что в способе определения местоположения бурового инструмента в процессе бурения, заключающемся в том, что осуществляют с помощью антенны одновременную синхронную регистрацию сейсмических колебаний, возбуждаемых буровым инструментом в процессе бурения, регистрацию сейсмических колебаний осуществляют с помощью датчиков давления многоэлементной гидроакустической мультилинейной кабельной антенны на морском дне, преобразуют сигналы датчиков в цифровую форму, передают эти сигналы через оптоволоконный кабель на надводную систему запоминания и хранения данных в виде сейсмограмм, осуществляют частотную фильтрацию сигналов в нескольких частотных диапазонах, последовательно обрабатывают сигналы во временных окнах, соответствующих частотным диапазонам, осуществляют пространственную фильтрацию плоских волн, рассчитывают функции сембланса в области под апертурой антенны, определяют местоположения источников шума, создаваемого буровым инструментом, по максимуму сембланса, вычисляют когерентные компоненты сейсмограмм для найденного источника, вычитают когерентные компоненты из сейсмограмм, интегрируют данные о положении источников в различных частотных диапазонах и определяют траекторию скважины с учетом последовательно определенных положений бурового инструмента и ее общей длины.
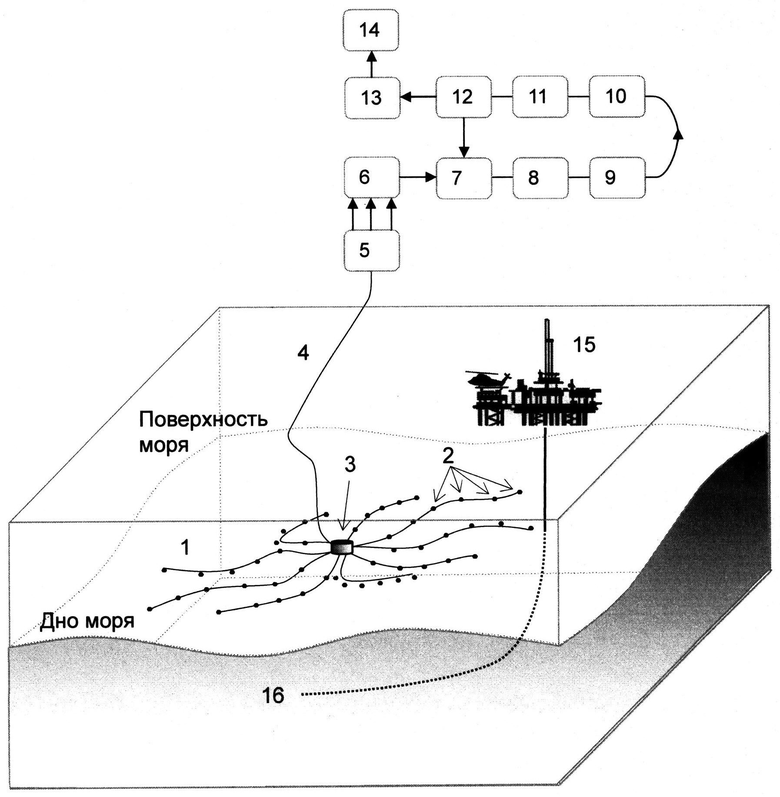
Сущность изобретения поясняется рисунком, на котором схематически показана блок-схема устройства, обеспечивающего реализацию предложенного способа.
Устройство содержит установленную на дне многоэлементную гидроакустическую мультилинейную кабельную антенну 1 с датчиками давления 2, соединенными с блоком сбора и преобразования сейсмоакустических сигналов 3, соединенным через оптоволоконный кабель 4 с надводным блоком запоминания и хранения данных в виде сейсмограмм 5, соединенным последовательно с блоком частотной фильтрации в нескольких частотных диапазонах 6, блоком последовательной обработки во временных окнах, соответствующих частотным диапазонам 7, блоком пространственной фильтрации плоских волн 8, блоком вычисления функции сембланса в области под апертурой антенны 9, блоком определения местоположения источников шума по максимуму сембланса 10, блоком вычисления когерентных компонент сейсмограмм для найденного источника 11, блоком вычитания когерентных компонент из сейсмограмм 12, блоком интеграции данных о положении источников в различных частотных диапазонах 13, блоком определения траектории скважины с учетом последовательно определенных положений бурового инструмента и общей длины скважины 14. На рисунке также условно показана буровая платформа 15 и буровой инструмент 16, являющийся источником шума.
Способ определения местоположения бурового инструмента в процессе бурения осуществляется следующим образом. На морском дне рядом с буровой платформой размещают многоэлементную донную гидроакустическую мультилинейную кабельную антенну 1 с датчиками давления 2 (количество датчиков более тысячи), с помощью датчиков давления осуществляют регистрацию на морском дне сейсмических колебаний, излучаемых буровым инструментом, преобразуют сигналы датчиков в цифровую форму в блоке сбора и преобразования 3, передают эти сигналы через оптоволоконный кабель 4 на надводную систему запоминания и хранения данных в виде сейсмограмм 5, осуществляют частотную фильтрацию сигналов в нескольких частотных диапазонах в блоке 6, последовательно обрабатывают сигналы во временных окнах, соответствующих частотным диапазонам в блоке 7, осуществляют пространственную фильтрацию плоских волн в блоке 8, во временных окнах, согласованных с частотным фильтром, последовательно рассчитывают функции сембланса в области под апертурой антенны в блоке 9. Далее определяют местоположения источников шума по максимуму сембланса в блоке 10, вычисляют когерентные компоненты сейсмограмм для найденного источника в блоке 11, вычитают когерентные компоненты из сейсмограмм в блоке 12, интегрируют данные о положении источников в различных частотных диапазонах в блоке 13 и в блоке 14 определяют траекторию скважины с учетом последовательно определенных положений бурового инструмента и ее общей длины.
Исходно данные с сейсмоакустической антенны 1, записанные в геофизическом формате SEGY, фильтруются полосовым частотным фильтром 6 в нескольких частотных диапазонах. Необходимые частотные диапазоны определяются путем анализа амплитудных спектров исходных записей, усредненных по всем приемникам антенны. При этом выделяются как отдельные резонансные частоты, соответствующие квазипериодическим сигналам от вращающегося бурового инструмента, так и квазинепрерывная часть спектра, соответствующая широкополосным импульсным сигналам, возникающим при разрушении породы.
Далее, к отфильтрованным в каждом частотном диапазоне сейсмограммам применяется фильтр плоских волн 8. Фильтр плоских волн реализован по схеме, аналогичной вычислению сембланса. Процедура фильтрации плоских волн состоит в последовательном определении и вычитании когерентных средних сейсмограмм для источников, равномерно расположенных на полусфере с радиусом, в 10 раз превышающим характерный размер апертуры антенны.
На следующем этапе фильтрованные частотным и плосковолновым фильтром сейсмограммы разбиваются на последовательность временных окон, размер которых согласован с частотным фильтром. Для каждого из временных окон на основе априорной модели геологической среды вычисляется куб функции сембланса и определяется максимум в этом кубе. Найденный максимум сембланса ассоциируется с пространственным положением источника акустического шума (буровым инструментом).
Отличительной особенностью технологии обработки сейсмоакустических сигналов, зарегистрированных мультилинейной донной антенной, является использование оценки «сембланс» для выделения энергии когерентной части сейсмоакустического поля, создаваемого буровым инструментом на фоне шумов с одновременным определением положения источника когерентного сигнала.
Сембланс представляет собой отношение оценки когерентной энергии сигнала в некотором временном окне к оценке его полной энергии, зарегистрированной в том же временном окне всей совокупностью приемников
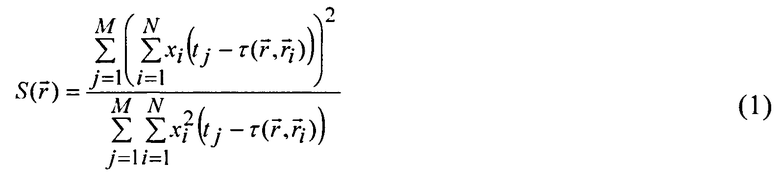
где xi(tj) - запись сигнала i-ого приемника от дискретного времени tj, 


Приближение функции сембланс к единице означает высокую когерентность сигналов на каналах сейсмической антенны. Случайному некоррелированному гауссову шуму на всех приемниках антенны соответствует уровень значения сембланса порядка 1/N, где N - число приемников в антенне. Минимальный значимый уровень сембланса выбирается, например, не менее 5/N. Максимум функции сембланса ассоциируют с положением бурового инструмента.
Далее для точки максимума сембланса вычисляется когерентная средняя сейсмограмма (с учетом временных задержек и амплитудных коррекций, определяемых по априорной модели среды) в заданном временном окне. Для найденной когерентной средней сейсмограммы находится огибающая и ее максимум. Положение временного окна корректируется таким образом, чтобы максимум огибающей оказался в центре временного окна. После этого снова вычисляется сембланс и соответствующая его максимуму когерентная средняя сейсмограмма. Найденная когерентная средняя сейсмограмма вычитается (с учетом временных задержек и амплитудных коррекций) из исходных сейсмограмм.
После этого, в исходном временном окне снова находится максимум сембланса и процедура повторяется до тех пор пока очередной найденный максимум не станет меньше чем заданный уровень отсечки (~k/N, где k=5-10, а N число приемников в антенне). Таким образом, в текущем временном окне последовательно определяются все источники, когерентный вклад от которых превосходит заданный уровень сембланса.
Далее вся описанная выше процедура повторяется в следующих временных окнах.
После сканирования временными окнами всей записи для всех частотных интервалов получают набор источников выделенного когерентного излучения. Полученный набор источников во всех частотных диапазонах группируется по пространственным координатам и временным окнам. На основе анализа этого набора, который состоит в определении положения источника, средневзвешенного по амплитудам когерентных частей сейсмограмм, источников, найденных в различных частотных диапазонах, определяется эффективное положение бурового интструмента в данный момент времени.
Найденные в последовательные моменты времени положения источников акустической эмиссии образуют совокупность точек, которые рассматриваются как пространственная траектория скважины. Поскольку эта траектория имеет и временную координату, для ее регуляризации может быть использована независимая информация о текущей длине скважины, которая определяется длиной буровой колонны, а также информация о минимальной кривизне скважины. Эта задача решается на основе сплайновой аппроксимации пространственно-временного набора данных с учетом ограничений на длину и кривизну траектории.
Удобным математическим объектом, для восстановления пространственной траектории скважины, обладающей отмеченными свойствами, является параметрический кубический сплайн. В общем случае, на параметрической сетке {ti, i=1…n} одномерный параметрический кубический сплайн может быть представлен, как разложение по В-сплайнам в виде.

где w=x, y, z, а φk(t) - k-ый В-сплайн.
Задача о нахождении совокупности коэффициентов этого сплайна 

В этом функционале слагаемое

ответственно за прохождение сплайна вблизи точек данных. Здесь wq - определенные ранее координаты положения бурового инструмента. Слагаемое

является линеаризованным функционалом свободной энергии (кривизны) тонкого стержня. Это слагаемое определяет поведение сплайна в областях без данных и отвечает за сглаживание данных. Параметр αw отвечает за сглаживание. Чем этот параметр больше, тем ближе полученный сплайн к аппроксимирующей прямой. Слагаемое

определяет близость длины сплайна к ее заданной величине L.
Таким образом, при заданной параметризации точек построение одномерного параметрического кубического сплайна сводится к системе линейных уравнений, возникающей из условия min 

Решение этой системы дает коэффициенты разложения пространственной линии по параметрическим кубическим В-сплайнам. Схема обработки сейсмоакустических сигналов реализована в виде специальной программы, установленной на компьютере.
Изобретение обеспечивает возможность определения местоположения бурового инструмента при осуществлении бурения с буровых морских платформ и повышение точности определения местоположения бурового инструмента.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ДОЛОТА В ПРОЦЕССЕ БУРЕНИЯ | 2006 |
|
RU2305298C1 |
| Способ определения границ трещиноватой зоны | 2022 |
|
RU2789759C1 |
| УСТОЙЧИВЫЙ МЕТОД ПОСТРОЕНИЯ ГЛУБИННЫХ ИЗОБРАЖЕНИЙ В СЕЙСМОРАЗВЕДКЕ НА ОСНОВАНИИ НАСТРОЙКИ ОПЕРАТОРА ПО ЭТАЛОННЫМ СЕЙСМОГРАММАМ | 2014 |
|
RU2577792C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2004 |
|
RU2263932C1 |
| СПОСОБ УЛУЧШЕНИЯ СЕЙСМИЧЕСКОГО СИГНАЛА, СОЗДАВАЕМОГО БУРОВЫМ ДОЛОТОМ, С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРОВ БУРЕНИЯ | 2000 |
|
RU2233001C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ ЗОНЫ МИКРОСЕЙСМИЧЕСКОЙ ЭМИССИИ И МЕСТОПОЛОЖЕНИЯ ЕЁ ПРОЕКЦИИ НА ПОВЕРХНОСТЬ | 2014 |
|
RU2573169C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ СЕЙСМОРАЗВЕДКИ ДЛЯ ПРЯМОГО ПОИСКА И ИЗУЧЕНИЯ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ ПО ДАННЫМ ПРЕОБРАЗОВАНИЯ, ОБРАБОТКИ И АНАЛИЗА УПРУГИХ ВОЛНОВЫХ ПОЛЕЙ В ЧАСТОТНОЙ ОБЛАСТИ | 2000 |
|
RU2169381C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЕРТИКАЛЬНЫХ СЕЙСМИЧЕСКИХ ПРОФИЛЕЙ В ХОДЕ БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2144684C1 |
Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной промышленности для непрерывного контроля местоположения бурового инструмента при бурении скважин. Согласно заявленному способу осуществляют с помощью антенны одновременную синхронную регистрацию сейсмических колебаний, возбуждаемых буровым инструментом в процессе бурения. Регистрацию сейсмических колебаний осуществляют с помощью датчиков давления многоэлементной гидроакустической мультилинейной кабельной антенны на морском дне. Преобразуют сигналы датчиков в цифровую форму и передают эти сигналы через оптоволоконный кабель на надводную систему запоминания и хранения данных в виде сейсмограмм. Осуществляют частотную фильтрацию сигналов в нескольких частотных диапазонах. Последовательно обрабатывают сигналы во временных окнах, соответствующих частотным диапазонам. Осуществляют пространственную фильтрацию плоских волн и рассчитывают функции сембланса в области под апертурой антенны. Определяют местоположения источников шума по максимуму сембланса. Вычисляют когерентные компоненты сейсмограмм для найденного источника и вычитают когерентные компоненты из сейсмограмм. Интегрируют данные о положении источников в различных частотных диапазонах и определяют траекторию скважины с учетом последовательно определенных положений бурового инструмента и ее общей длины. Технический результат - повышение точности определения местоположения бурового инструмента. 1 ил.
Способ определения местоположения бурового инструмента в процессе бурения, заключающийся в том, что осуществляют с помощью антенны одновременную синхронную регистрацию сейсмических колебаний, возбуждаемых буровым инструментом в процессе бурения, отличающийся тем, что регистрацию сейсмических колебаний осуществляют с помощью датчиков давления многоэлементной гидроакустической мультилинейной кабельной антенны на морском дне, преобразуют сигналы датчиков в цифровую форму, передают эти сигналы через оптоволоконный кабель на надводную систему запоминания и хранения данных в виде сейсмограмм, осуществляют частотную фильтрацию сигналов в нескольких частотных диапазонах, последовательно обрабатывают сигналы во временных окнах, соответствующих частотным диапазонам, осуществляют пространственную фильтрацию плоских волн, рассчитывают функции сембланса в области под апертурой антенны, определяют местоположения источников шума по максимуму сембланса, вычисляют когерентные компоненты для найденного источника, вычитают когерентные компоненты из сейсмограмм, интегрируют данные о положении источников в различных частотных диапазонах и определяют траекторию скважины с учетом последовательно определенных положений бурового инструмента и ее общей длины.
| СПОСОБ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ДОЛОТА В ПРОЦЕССЕ БУРЕНИЯ | 2006 |
|
RU2305298C1 |
| RU 2176405 C2, 27.11.2001 | |||
| WO 2006078216 A1, 27.07.2006 | |||
| WO 2010019070 A1,18.02.2010 | |||
| US 20030137899 A1, 24.07.2003 | |||
| СПОСОБ УЛУЧШЕНИЯ СЕЙСМИЧЕСКОГО СИГНАЛА, СОЗДАВАЕМОГО БУРОВЫМ ДОЛОТОМ, С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРОВ БУРЕНИЯ | 2000 |
|
RU2233001C2 |
| Аппарат для промывки озерной соли | 1925 |
|
SU10955A1 |

