Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной промышленности для непрерывного контроля по глубине и латерали местоположения бурового долота при бурении скважин с использованием сигнала, излучаемого долотом, в процессе бурения вертикальных, наклонных и горизонтальных скважин.
Известен способ улучшения сейсмического сигнала, создаваемого буровым долотом, с использованием параметров бурения [1]. Изобретение относится к области исследования скважин и пластов в процессе бурения и может быть использовано для повышения отношения сигнал/шум. В качестве пилот-сигнала используют сигнал, создаваемый буровым долотом. Измеряют взаимно коррелированные друг с другом пилот-сигнал и сейсмические сигналы, переданные в грунт и отраженные от пластов. Пилот-сигнал и сейсмические сигналы могут быть обращены из свертки с получением, таким образом, дорожек стандартных сейсмограмм, на которых сигнал искажен шумом. Одновременно с этими сигналами получают связанные с ними параметры бурения. Для обеспечения улучшенного отношения сигнала к шуму и более четкого разделения сигнала и шума пилот-сигнал и сейсмические сигналы, полученные многократными измерениями для одного и того же диапазона глубин, частично или полностью суммируют с весом на основе одного или более параметров бурения или их комбинации Для измерения указанных сигналов служит ряд приемников, образующих сейсмическую линию.
Недостатком способа является необходимость использования для повышения отношения сигнал/шум пилот-сигнала и учета параметров бурения, что не всегда возможно особенно при бурении поисковых и разведочных скважин.
Наиболее близким (прототип) к заявляемому изобретению является способ непрерывной корректировки двухмерного и трехмерного сейсмического изображения по глубине при бурении скважины с использованием сейсмической информации о скорости [2]. Изобретение относится к способу непрерывной корректировки сейсмического изображения по глубине при бурении скважины с использованием сейсмической информации о скорости. В соответствии с этим способом каждое новое изображение, точно привязанное к моменту времени, когда были получены результаты из скважины, позволяет лучше производить определение горизонтов, находящихся ниже головки бура, и, следовательно, значительно более точно управлять последующими фазами бурения. Сейсмическое изображение может быть "разрезом" в случае двухмерного массива данных или "объемом" в случае трехмерного массива данных. Указанный способ основан на использовании всей информации, касающейся скорости, которая может быть получена из скважины, для получения во время бурения скважины сейсмического изображения по шкале глубины путем выполнения многократной корректировки диапазона относительной скорости.
Начиная с опорного сейсмического изображения по глубине, полученного общепринятым методом, исходя из начального диапазона скорости, или полностью полученного из данных сейсморазведки методом отраженных волн, способ позволяет, в принципе, непрерывно в течение бурения скважины определять ход глубинной миграции сейсмических данных, а практически, с разумными интервалами по глубине, которые выбираются каждый раз с учетом глубины горизонтов, имеющих наибольшее значение в отношении сейсмичности.
Преимущество этого способа заключается в том, что он позволяет в реальном времени производить последовательную корректировку (обновление данных) сейсмических изображений по глубине, которые последовательно идентифицируются с геологическим профилем, на основе которого делается оперативный выбор. Кроме того, он имеет большое значение, так как позволяет получать такую информацию, как изменение промежуточных уровней трубной обвязки, отклонение от начальной траектории ствола скважины, переопределение глубины различных мишеней при проведении горных работ, при керновом бурении.
Недостатком способа [2] является обязательное наличие достаточно точной информации о скоростях распространения сейсмических волн в геологической среде до глубины предполагаемого бурения скважины.
Предлагаемый способ определения местоположения бурового долота в процессе бурения по глубине и латерали не требует наличия пилот-сигнала и предварительного знания скорости распространения сейсмических волн, которая не всегда известна при бурении поисковых и разведочных скважин. Кроме того, предлагаемый способ прост в реализации и применим при неизвестном строении геологической среды.
Техническим результатом изобретения является способ контроля местоположения бурового долота в процессе бурения путем оценки положения бурового долота в пространстве для оперативной корректировки траектории ствола. Контроль осуществляется посредством обработки регистрационных записей всех пар точек сейсмической антенны, установленной на дневной поверхности, путем вычисления функции когерентности, выделения при определенной величине функции когерентности квазимонохроматических сигналов, возбуждаемых в забое вращением бурового долота, определении на выделенных частотах временных задержек между всеми парами точек регистрации на дневной поверхности и вычислении координат местоположения бурового долота перебором в пространстве местоположения бурового долота, в области, близкой предыдущему положению, и скорости распространения упругих волн. Контроль определения местоположения долота осуществляют путем сравнения фактической длины опущенной буровой колонны с интегральной величиной длины, вычисленной по полученной траектории ствола указанным способом.
Технический результат достигается в соответствии с прототипом регистрацией на дневной поверхности сейсмического сигнала, возбуждаемого буровым долотом в процессе бурения, отличающийся тем, что для оперативной оценки положения бурового долота сейсмической антенной с трехкомпонентными датчиками, установленными на удалениях до 500-1500 м от устья скважины, осуществляют одновременную синхронную регистрацию сигнала, возбуждаемого буровым долотом в процессе бурения. Выделяют посредством вычисления функции когерентности квазимонохроматические частоты, излучаемые вращающимся долотом. Определяют разность фаз между различными каналами сейсмической антенны, по которой вычисляются в реальном времени, с учетом перебора параметров средней скорости разреза, местоположение бурового долота в пространстве. Множество точек определения координат местоположения бурового долота в процессе бурения представляется в виде траектории ствола в пространстве.
Предлагаемый способ позволяет оперативно оценивать местоположение в пространстве бурового долота в случае отсутствия данных о скоростях распространения сейсмических волн при бурении поисковых и разведочных скважин.
Суть способа
Обычный способ разведки с использованием вертикального сейсмического профиля предусматривает прерывание бурения, извлечение бурильной колонны и бура, опускание одного или нескольких сейсмоприемников в буровую скважину, генерацию на поверхности или на малой глубине вблизи скважины одного или нескольких акустических импульсов (например, путем взрыва зарядов) и измерение сигналов, которые достигают сейсмоприемников, расположенных внутри скважины. При таком способе нет сомнений относительно первичного сигнала, который генерируется на поверхности, но имеются значительные недостатки. Этот способ фактически является очень дорогостоящим, поскольку требует прерывания буровых работ на длительное время, и поэтому может применяться в процессе бурения лишь ограниченное число раз. Кроме того, извлечение и повторное опускание бурильной колонны является довольно рискованной операцией и поэтому требует принятия специальных мер безопасности и предосторожностей.
Поэтому было предложено осуществлять такие измерения с использованием сигнала, создаваемого буровым долотом в процессе бурения, долото при этом используется в качестве сейсмического источника. Можно упомянуть измерительные системы, описанные в патентах США (№4965774, 4862423, 4954998, 4964087, 4718048, 5050130, 5511038 и 4922362), когда долото используется в качестве сейсмического источника.
Преимуществом использования в качестве сейсмического источника самого бурового долота является возможность проведения в процессе бурения измерений на поверхности без прерывания работ и сбор большого количества данных с меньшими затратами и с меньшим риском, при частых или даже непрерывных сериях измерений. Однако сигнал, создаваемый долотом, при распространении подвергается возмущениям и, кроме того, является непрерывным в течение некоторого периода времени. Поэтому очень трудно надежно установить, что именно является сигналом, создаваемым долотом, чтобы осуществить его сравнение с эхо-сигналами, зарегистрированными датчиками, установленными на поверхности вокруг буровой скважины. Поэтому этот сигнал постоянно улавливают, контролируют и обрабатывают посредством специальных служебных блоков на месте бурения.
Кроме того, шумы на поверхности и незначительная мощность излучаемого буровым долотом сигнала требует применения специальных методов выделения слабого сигнала на фоне помех. При этом время анализа сигнала ограничено изменением положения бурового долота в процессе бурения, перемещение долота за время анализа ухудшает пространственное разрешение определения его местоположения. При бурении пород разной прочности возбуждается сигнал разного уровня, чем меньше прочность, тем меньше уровень сигнала. От скорости вращения бурового долота (бура) зависят и частоты выделяемых квазимонохроматических сигналов, то есть частоты выделяемого сигнала определяет скорость вращения бурового долота.
Параметры бурения, измеренные на поверхности, дают описание статических и динамических параметров процесса бурения. Условия на близлежащей поверхности, описываемые этими параметрами, влияют на сигнал, создаваемый долотом, и в свою очередь связаны с условиями бурения в забое скважины и зависят от непостоянства динамического процесса бурения, типа долота и его технического состояния, типа породы, которая подвергается бурению.
Для оперативной оценки положения бурового долота в процессе бурения в реальном времени предлагается более простой способ определения местоположения долота по регистрационным записям сейсмической антенны, на которых выделяют квазимонохроматические сигналы, излучаемые вращающимся буром и отдельно тремя шарошками долота, в случае если долото шарошечное. Для алмазного долота частоты будут другие. По этим сигналам, зарегистрированным в разных точках (датчики сейсмической антенны) на дневной поверхности, оценивают времена задержки монохроматического сигнала при прохождении к разным датчикам с учетом величины функции когерентности, которая должна быть не менее определенного уровня. По временам задержки и положению долота в предыдущий момент времени бурения (это может быть местоположение устья скважины в начале бурения или местоположение устья, определенное по инклинометрии, до начала контроля указанным способом) определяют координаты местоположения долота путем перебора по пространству положения ствола скважины, в области, близкой к полученному предыдущему положению, и скорости распространения упругих волн.
Способ осуществляют следующим образом.
Па перспективной площади, на дневной поверхности, предназначенной для бурения поисковых или разведочных скважин, устанавливают сейсмическую антенну (не менее шести трехкомпонентных сейсмоприемников, расположенных на удалении от устья скважины 500-1500 м) с регистраторами типа Reftek. В начале бурения скважины осуществляют регистрацию сейсмических сигналов, излучаемых буровым долотом. Выделяют квазимонохроматические частоты, излучаемые долотом в процессе бурения. Например, это частоты вращения бура относительно колонны и частоты вращения шарошек в случае использования шарошечного долота.
Для выделения квазимонохроматических частот, излучаемых долотом, вычисляют функцию когерентности для всех пар каналов (точек) регистрации i,j как

где Gij - взаимный спектр мощности, Gii и Gjj - спектры мощности каналов i и j.
Функция когерентности является взаимосвязью перебора сигналов, регистрируемых на дневной поверхности, с координатами долота (аналог корреляционной зависимости между координатами долота и точками регистрации).
Приближение функции когерентности к единице означает высокую взаимную зависимость монохроматических сигналов на каналах сейсмической антенны, величина функции выбирается, например не менее 0.7, и характеризует представительность полученных спектров сигналов. По максимальным значениям функции когерентности выделяют на спектрах ряд квазигармонических частот fk. На этих частотах, по полученным спектрам функции когерентности, определяют разность фаз монохроматической волны в определенный момент времени для всех пар точек регистрации. Количественно разность фаз определяется в виде фазы взаимного спектра мощности на выделенных монохроматических частотах с большой величиной функции когерентности:
В свою очередь разность фаз на частотах квазимонохроматического сигнала связана с временной задержкой τij между каналами (точками регистрации i и j) как
где fk - циклические частоты монохроматических сигналов. Далее по всем парам точек регистрации i, j на дневной поверхности, с учетом полученных по регистрационным записям задержек τi,j, перебором точек положения долота в пространстве и величинам скорости определяют местоположение долота в каждый момент времени в процессе бурения скважины.
Координаты положения долота определяют следующим образом.
При бурении от точки bn=(Xn,Yn, Zn) к bn+1=(Xn+1,Yn+1, Zn+1) в интервале времени [tn, tn+1] долото может отклоняться в пространстве в ту или иную сторону, но не более чем на величину  - известное приращение длины бурильной колонны в интервале времени [tn, tn+1] (длина бурильной колонны определяется суммарной длиной полного количества соединяемых бурильных труб или частью трубы в процессе бурения). Следовательно, положение бура в момент времени tn+1 находится в одной из точек полусферы с центром в точке bn=(Xn,Yn, Zn) и радиусом , что обусловлено физической возможностью перемещения бура из точки bn в точку bn+1 за время tn+1-tn. Поэтому на положение долота при перемещении из точки bn в точку bn+1 вводится ограничение
- известное приращение длины бурильной колонны в интервале времени [tn, tn+1] (длина бурильной колонны определяется суммарной длиной полного количества соединяемых бурильных труб или частью трубы в процессе бурения). Следовательно, положение бура в момент времени tn+1 находится в одной из точек полусферы с центром в точке bn=(Xn,Yn, Zn) и радиусом , что обусловлено физической возможностью перемещения бура из точки bn в точку bn+1 за время tn+1-tn. Поэтому на положение долота при перемещении из точки bn в точку bn+1 вводится ограничение

где ρ=[(Xn+1,m-Yn)2+(Yn+1,m-Yn)2+(Zn+1,m-Zn)2]1/2 - расстояние между точками bn и bn+1,m, m - индекс положения долота в точках полусферы, М - количество этих точек, которое оценивается как целая часть выражения:
где ΔX,Y,Z - шаг перебора по координатам в пространстве, a ΔC - шаг перебора по скорости распространения упругих колебаний, которая изменяется в пределах Cmin≤C≤Cmax, где Cmin и Cmax определяется скоростным строением среды. Обычно скорость в верхней части разреза меняется в пределах 400-600 м/сек, а на глубине 2000-3000 метров - в пределах 2500-3500 м/сек. Интервалом скоростей [400-3500] м/сек покрываются возможные значения скоростей при разведке залежей углеводородов в Сибири. При необходимости можно рассматривать более широкий интервал. Задержки времени τ* ijm для всех пар точек регистрации i, j от сигнала долота из точек m полусферы с координатами (Xn+1,m,Yn+1,m, Zn+1,m) определяют по формуле:

где рi, рj - координаты точек регистрации, Сm - скорость упругой волны в среде на пути от источника в полусфере до точек регистрации.
Так как в начальный момент времени t0 координата положения долота b0(X0,Y0,Z0) на дневной поверхности в устье скважины известна, то остальные координаты вычисляют последовательно перебором в области полусфере путем минимизации функционала

где N - количество точек регистрации на дневной поверхности, М - количество точек перебора положения долота в полусфере.
Контроль полученных координат местоположения долота осуществляют сравнением фактической длины опущенной колонны в момент времени определения местоположения долота с интегральной длиной, вычисленной по определенной траектории ствола скважины. Фактическая длина опущенной в скважину колонны определяют путем суммирования количества бурильных труб известной стандартной длины, соединяемых в процессе бурения скважины.
Интегральную длину колонны определяют по точкам траектории ствола скважины, вычисляемым в процессе бурения следующим образом.
Так как b0(X0,Y0,Z0) - координаты устья скважины в момент времени t0 (время начала бурения), a bi (Xi,Yi,Zi) - координаты забоя скважины в некоторый момент времени ti, то на момент времени tn интегральная длина колонны оценивается следующим выражением:

Фактическая длина колонны Lфакт на момент времени tn определяется как Ln,факт=m·lT+ΔlT, где m - количество бурильных труб, опущенных в скважину, lT - длина стандартной трубы, ΔlT - длина опущенной части последней трубы. Если на какой-либо момент времени tn|Ln,факт-Ln,интегр| ε, где ε - допустимая ошибка определения длины (например, один метр), то последнюю определенную точку координат забоя считают некорректной и выбрасывают. А процесс определения местоположения долота повторяют. Процесс определения очередных координат забоя занимает несколько секунд, а процесс бурения скважины несколько недель, следовательно, кусочно-линейная аппроксимация длины колонны (2) достаточно точно описывает интегральную длину колонны в процессе бурения, а табличная функция координат bi (Xi, Yi, Zi) достаточно точно описывает траекторию ствола скважины в пространстве.
ε, где ε - допустимая ошибка определения длины (например, один метр), то последнюю определенную точку координат забоя считают некорректной и выбрасывают. А процесс определения местоположения долота повторяют. Процесс определения очередных координат забоя занимает несколько секунд, а процесс бурения скважины несколько недель, следовательно, кусочно-линейная аппроксимация длины колонны (2) достаточно точно описывает интегральную длину колонны в процессе бурения, а табличная функция координат bi (Xi, Yi, Zi) достаточно точно описывает траекторию ствола скважины в пространстве.
Возможность контроля по длине опущенной колонны обосновывается ограничениями условий изгиба колонны в скважине в процессе бурения, которые определяются механикой материала колонны и вмещающих пород.
Пример.
Способ контроля местоположения бурового долота в процессе бурения был использован для контроля местоположения забоя скважины при горизонтальном бурении участка скважины на месторождении Вать-Егань (куст 85, скважина 807Г). Первоначальное положение забоя было определено с помощью инклинометрии вертикальной части скважины до начала горизонтального бурения. Регистрация осуществлялась станциями Reftek с датчиками GS11D, установленными на поверхности. Расстановка антенны указана на чертеже.
Перечень графических иллюстраций применения предлагаемого способа.
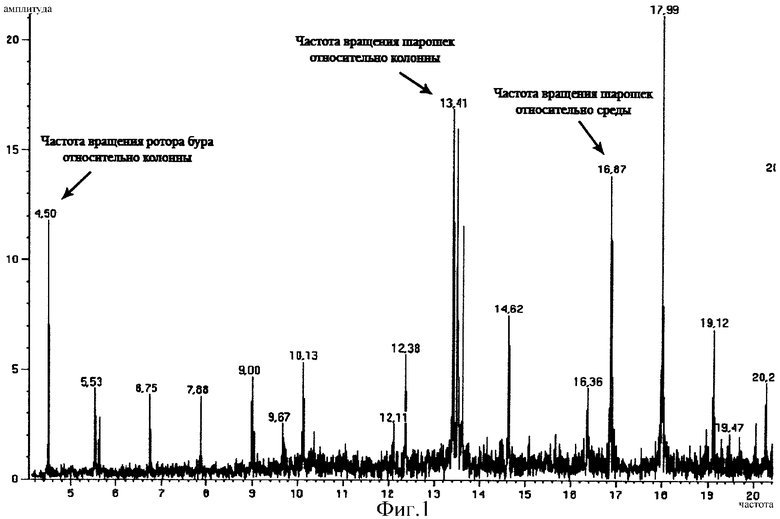
Фиг.1 - спектры, полученные по сейсмическим записям на дневной поверхности в процессе бурения скважины.
Фиг.2 - этапы определения координат местоположения ствола скважины, полученные в процессе бурения, с наложением траектории ствола, определенной по результатам инклинометрии.
На фиг.1 представлены спектры, подтверждающие наличие квазимонохроматических частот на регистрационных записях сейсмической антенны, установленной на дневной поверхности. Частота 4.5 Гц соответствует частоте вращения шарошечного долота относительно вращающейся колонны, частоты в области 13.41-13.6 Гц соответствуют частотам вращения трех шарошек относительно колонны с несколько отличающейся частотой вращения. Как видно из спектров, высокий уровень зарегистрированного сигнала позволяет легко выделять квазимонохроматические частоты, излучаемые вращающейся колонной и буровым долотом, и определять задержки между каналами τij, необходимые для определения местоположения долота в процессе бурения.
На фиг.2 показаны этапы определения положения забоя горизонтальной части скважины, полученные в процессе бурения, с наложением траектории ствола, определенной по результатам инклинометрии. На левом кубе представлены точки установки сейсмической антенны на дневной поверхности и траектория ствола скважины по результатам инклинометрии. На правом кубе представлена горизонтальная часть ствола скважины, где светлыми точками обозначена конфигурация ствола скважины, определенная с помощью инклинометрии, черными обозначены координаты ствола, определенные по предлагаемому способу. Ошибка определения составляет приблизительно ±10 метров, что обусловлено бурением горизонтальной части скважины, при котором нагрузка на буровой инструмент минимальна.
Как видно из полученных данных, предлагаемый способ позволяет контролировать местоположение бура при бурении горизонтальной части скважины с точностью ±10 метров, чего вполне достаточно для оперативного контроля проходки горизонтальной части скважины. При бурении вертикальных скважин можно обеспечить большую точность, поскольку величина нагрузки на буровую колонну при вертикальном бурении существенно выше и соответственно выше будет отношение сигнал/помеха, то есть амплитуды монохроматического сигнала на дневной поверхности будут существенно больше.
Источники информации
1. Способ улучшения сейсмического сигнала, создаваемого буровым долотом, с использованием параметров бурения. Патент РФ №2233001, Кл. 7 G01V 1/28, 1/40, E21B 47/12, опубл. 20.07.2004.
2. Способ непрерывной корректировки двухмерного и трехмерного сейсмического изображения по глубине при бурении скважины с использованием сейсмической информации о скорости. Патент РФ №2176405, Кл. 7 G01V 1/40, опубл. 27.11.2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ИНСТРУМЕНТА В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2572668C1 |
| Способ определения местоположениязАбОя СКВАжиНы | 1979 |
|
SU840777A1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 1996 |
|
RU2101733C1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ ДЛЯ ПРЯМОГО ПРОГНОЗА НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 1997 |
|
RU2117317C1 |
| Способ геонавигации бурильного инструмента и управления его траекторией при проводке скважин в нужном направлении | 2015 |
|
RU2613364C1 |
| СПОСОБ АЗИМУТАЛЬНОЙ АКУСТИЧЕСКОЙ КОРРЕКЦИИ ИНКЛИНОМЕТРА | 2015 |
|
RU2619563C2 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕИСПРАВНОСТИ В КАБЕЛЬНОЙ БУРИЛЬНОЙ ТРУБЕ | 2007 |
|
RU2436109C2 |
| Способ определения местоположения забоя скважины | 1989 |
|
SU1698865A1 |
| МОДЕЛИРОВАНИЕ ПЕРЕХОДНОГО РЕЖИМА КНБК/БУРИЛЬНОЙ КОЛОННЫ В ПРОЦЕССЕ БУРЕНИЯ | 2008 |
|
RU2461707C2 |
| СПОСОБ РОТОРНОГО БУРЕНИЯ СКВАЖИН МОДУЛЬНОЙ УПРАВЛЯЕМОЙ СИСТЕМОЙ МАЛОГО ДИАМЕТРА | 2018 |
|
RU2687998C1 |

Изобретение относится к области сейсмических исследований и может быть использовано в нефтяной промышленности для непрерывного контроля по глубине и латерали местоположения бурового долота при бурении скважин с использованием сигнала, излучаемого долотом, в процессе бурения вертикальных, наклонных и горизонтальных скважин. В предлагаемом способе осуществляют регистрацию сейсмических колебаний, возбуждаемых долотом в процессе бурения, с помощью сейсмической антенны, установленной на дневной поверхности. По регистрационным записям всех пар точек сейсмической антенны периодически посредством вычисления функции когерентности выделяют квазимонохроматические частоты, возбуждаемые в забое вращением долота и колонны. Определяют на выделенных частотах временные задержки между всеми парами точек регистрации. Перебором в пространстве местоположения бурового долота, в области, близкой предыдущему положению долота, и скорости распространения упругих волн определяют координаты местоположения бурового долота во времени в процессе бурения скважин. Определение координат местоположения долота контролируют путем сравнения фактической длины опущенной колонны с интегральной длиной, вычисленной по полученной указанным методом траектории ствола, и, таким образом, контролируют процесс бурения скважины во времени. 2 ил.
Способ контроля местоположения бурового долота в процессе бурения, заключающийся в том, что осуществляют одновременную синхронную регистрацию сейсмических колебаний на дневной поверхности с помощью сейсмической антенны, состоящей из группы трехкомпонентных сейсмодатчиков, возбуждаемых буровым долотом в процессе бурения, отличающийся тем, что периодически из регистрационных записей всех пар точек сейсмической антенны посредством вычисления спектра функции когерентности, выделяют квазимонохроматические сигналы, возбуждаемые в забое вращением бурового долота, определяют на выделенных частотах временные задержки между всеми парами точек регистрации на дневной поверхности, перебором местоположения бурового долота в пространстве, ограниченным величиной приращения длины бурильной колонны, и перебором скорости распространения упругих волн определяют координаты местоположения бурового долота во времени в процессе бурения, контролируют определение координат местоположения долота путем сравнения фактической длины опущенной колонны с интегральной длиной, вычисленной по траектории ствола, и таким образом контролируют процесс бурения скважины во времени.
| RU 2176405 A1, 27.11.2001 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ БЛОКА ФЕРРИТОБЫХ МАГНИТНЫХ ГОЛОВОК | 1972 |
|
SU434456A1 |
| Сейсмоакустический способ контроля бурения глубоких скважин | 1989 |
|
SU1752942A1 |
| Аппаратура для получения данных в процессе бурения | 1980 |
|
SU873181A1 |
| Способ определения местоположения бурового инструмента и его ориентирование в обсадной колонне | 1983 |
|
SU1129333A1 |
| Способ акустических исследований скважин в процессе бурения | 1975 |
|
SU744406A1 |
| Способ определения местоположениязАбОя СКВАжиНы | 1979 |
|
SU840777A1 |

