Изобретение относится к способу управления ортезом или протезом сустава нижней конечности с создающим сопротивление приспособлением, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния.
Ортезы или протезы коленных суставов имеют верхнюю соединительную часть и нижнюю соединительную часть, которые соединены друг с другом с помощью шарнирного приспособления. На верхней соединительной части расположена гильза для размещения культи бедра или шины бедра, в то время как на нижней соединительной части расположена ножка для голени или шина голени. В простейшем случае верхняя соединительная часть соединена с возможностью поворота с нижней соединительной частью с помощью одноосевого шарнира. Такая система является достаточной лишь в исключительных случаях для обеспечения желаемого успеха, например поддержки при использовании ортеза или естественной походки при использовании в протезе.
Для максимально естественного выполнения различных требований во время различных фаз шага или других движений предусмотрены создающие сопротивление приспособления, которые обеспечивают сопротивление сгибанию или сопротивление разгибанию. С помощью сопротивления сгибанию устанавливается, насколько легко ножка голени или шина голени совершает маховое движение назад относительно гильзы бедра или шины бедра при приложении силы. Сопротивление разгибанию тормозит движение вперед ножки голени или шины голени и обеспечивает, среди прочего, упор для разгибания.
Из уровня техники, например, из DE 10 2008 008 284 А1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, который снабжен несколькими датчиками, например, датчиком угла сгибания, датчиком ускорения, датчиком наклона и/или датчиком силы. Упор для разгибания определяется в зависимости от получаемых данных датчиков.
В DE 10 2006 021 802 А1 приведено описание устройства управления пассивного протеза коленного сустава с регулируемым демпфированием в направлении сгибания для согласования протезного устройства с верхними соединительными средствами и соединительным элементом для искусственной ступни. Согласование осуществляется для поднимания по лестнице, при этом обнаруживается имеющее небольшой момент поднимание протеза ступни, и в фазе подъема демпфирование сгибания уменьшается ниже уровня, который подходит для ходьбы по плоскости. Демпфирование сгибания можно увеличивать в зависимости от изменения угла колена и в зависимости от воздействующей на голень осевой силы.
Задачей данного изобретения является создание способа управления искусственным коленным суставом, с помощью которого обеспечивается возможность согласования в зависимости от ситуации сопротивления сгибанию и сопротивления разгибанию.Эта задача решена согласно изобретению с помощью способа с признаками пункта 1 формулы изобретения. Предпочтительные варианты выполнения и модификации изобретения указаны в зависимых пунктах формулы изобретения.
Способ согласно изобретению для управления ортезом или протезом сустава нижней конечности, содержащим создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, при этом во время использования сустава с помощью датчиков обеспечивается информация состояния, предусматривает, что определяют данные датчиков по меньшей мере одного приспособления для измерения по меньшей мере:
- двух моментов, или
- одного момента и одной силы, или
- двух моментов и одной силы, или
- двух сил и одного момента,
и данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию. Датчики, которые могут быть выполнены, например, в виде датчиков момента колена или голени или датчиков осевой нагрузки, обеспечивают исходные данные, из которых вычисляют вспомогательную переменную с помощью математической операции, например, сложения, умножения, вычитания или деления. Эта вспомогательная переменная является достаточно информативной для вычисления на ее основе согласования сопротивлений. Вспомогательная переменная обеспечивает возможность получения быстро и без больших вычислительных затрат параметра, с помощью которого вычисляют фактически подлежащее установке сопротивление и управляют соответствующим образом исполнительным механизмом для достижения желаемого сопротивления. При этом в качестве вспомогательной переменной предусмотрены моменты в сечении, силы в сечении, силы или расстояния, при этом в качестве вспомогательной переменной можно определять, например, силы и моменты, которые действуют в местах ортеза или протеза, которые недоступны непосредственно с помощью датчиков. В то время как датчики определяют лишь непосредственно действующие силы или моменты, с помощью вычисления вспомогательной переменной можно привлекать величину для оценки установки сопротивлений, которую нельзя измерять непосредственно. Это расширяет возможности при оценке, когда использовать какое сопротивление, в каком состоянии движения, или в каком положении сустава или протеза. В принципе можно одновременно определять несколько вспомогательных переменных и использовать для управления.
Датчики расположены, например, на ножке голени или на шине голени, а также в зоне суставов. Вспомогательная переменная может представлять физическую величину в виде виртуального датчика. Поскольку она вычисляется, среди прочего, из моментов, сил и геометрических размеров искусственного сустава, то в качестве вспомогательной переменной можно определять силу, расстояние силы от точки отсчета или высоты отсчета, момент в сечении или силу в сечении на высоте отсчета. В качестве вспомогательной переменной можно определять расстояние вектора силы до оси на высоте отсчета, момент в сечении на высоте отсчета или силу в сечении. Так, например, можно вычислять расстояние вектора силы реакции грунта посредством деления момента на осевую силу. Для этого, например, предусмотрено, что по меньшей мере одно приспособление для измерения момента, например датчик момента, измеряет момент колена, так что в качестве вспомогательной переменной определяют расстояние вектора силы реакции грунта, например, на высоте колена, т.е. на высоте оси коленного сустава. Можно также определять расстояние до продольной оси, например расстояние до точки отсчета на продольной оси, при этом продольная ось соединяет приспособления для измерения моментов. Так, например, можно применять расстояние вектора силы до продольной оси нижней соединительной части на коленном суставе, т.е. до голенной части. В качестве вспомогательной переменной определяют расстояние вектора силы до соединительной части сустава в положении отсчета посредством связи данных по меньшей мере одного приспособления для измерения двух моментов и одной силы.
В принципе можно применять также другие высоты отсчета посредством расположения приспособления для измерения момента на уровне высоты отсчета или посредством вычисления момента на высоте отсчета с помощью взвешенного сложения двух моментов, которые не находятся на высоте отсчета. В качестве вспомогательной переменной можно определять момент в сечении или силу в сечении одного компонента на высоте отсчета. Вспомогательная переменная, которая измеряется с помощью виртуального датчика, т.е. с помощью математической связи данных нескольких датчиков, вычисляется в вычислительном блоке, например в микропроцессоре.
В частности, в качестве вспомогательных переменных для управления искусственным коленным суставом можно выделить следующие величины, а именно, расстояние силы реакции грунта до оси коленного сустава или момент силы реакции грунта вокруг оси колена, расстояние силы реакции грунта на высоте ступни или момент, который создает сила реакции грунта вокруг оси голени на высоте ступни, в частности, на высоте грунта.
Другая возможность для вычисления вспомогательной переменной состоит в определении расстояния вектора силы от оси голени в положении отсчета посредством связи данных двух приспособлений для измерения момента и датчика осевой силы. Когда речь идет о датчике момента, то сюда входят также приспособления для измерения момента, которые состоят из нескольких компонентов и не обязательно расположены в месте, в котором действует момент.
Можно также определять момент в сечении на высоте отсчета посредством взвешенного сложения или вычитания значений датчика момента голени и датчика момента колена. Момент в сечении является затем вспомогательной переменной, на основании которой выполняется, соответственно, управление.
Кроме того, возможно и предусмотрено, что в качестве вспомогательной переменной определяется действующая на нижнюю соединительную часть, например ступню, поперечная сила из частного разницы двух моментов, например момента колена и момента голени, и расстояния между датчиками момента. На основе определяемой вспомогательной переменной или нескольких вспомогательных переменных затем вычисляется и устанавливается соответствующее сопротивление. После превышения максимума для вспомогательной переменной можно непрерывно уменьшать сопротивление с помощью вспомогательной переменной, с целью обеспечения более легкого махового движения сустава на наклонных поверхностях или лестницах.
При достижении или превышении заданного значения для вспомогательной переменной можно переключать создающее сопротивление приспособление в состояние маховой фазы, за счет чего получается измененная относительно состояния фазы стояния исходная установка демпфирования сгибания и демпфирования разгибания. Для этого можно использовать момент в сечении или расстояние до вектора силы реакции грунта на высоте ступни.
Предусмотрено, что имеются датчики для определения угла колена, угловой скорости колена, положения шины бедра или положения гильзы бедра, положения голени или положения ножки голени, изменения этих положений и/или ускорения ортеза или протеза, и что их данные, наряду с применением для определения вспомогательной переменной, применяются для управления сопротивлением, соответственно, сопротивлениями.
Для возможно более беспрепятственного согласования сопротивления с условиями состояния предусмотрено, что как измерение данных, так и вычисление вспомогательной переменной и согласование сопротивления происходит в реальном времени. Предпочтительно изменение сопротивления происходит непрерывно с помощью вспомогательной переменной и/или данных датчиков с целью осуществления плавного согласования изменения управления, так что пользователь ортеза или протеза не сталкивается с внезапными изменениями поведения ортеза или протеза.
Кроме того, предусмотрено, что при заданной разгрузке, т.е. уменьшении силы реакции грунта в ортезе или протезе, например при поднимании ноги, сопротивление сгибанию уменьшается, а при увеличивающейся нагрузке сопротивление сгибанию повышается. При такой функции стояния, которая имеется постоянно и всегда выполняется, когда возникает шаблон естественного движения, сопротивление может приводить к блокированию сустава. Повышение или уменьшение сопротивления происходит предпочтительно непрерывно и обеспечивает плавный переход, что приближается к естественному движению и приводит к чувству безопасности у носителя ортеза или протеза. Если вспомогательная переменная изменяется, то блокирование или повышение сопротивления, которое активировано в функции стояния, может быть снято или уменьшено, например, на основании изменения положения протеза или ортеза в пространстве.
Принципиально предусмотрено, что переход от фазы стояния в маховую фазу происходит в зависимости от нагрузки, возможно также плавный переход из установки сопротивления для фазы стояния в установку сопротивления для маховой фазы посредством постепенного согласования сопротивлений и при необходимости, т.е. при наличии соответствующих данных для вспомогательной переменной, также постепенное возвращение снова в фазу стояния. Это является предпочтительным, в частности, для обеспечения возможности маховой фазы на наклонной поверхности за счет применения в качестве вспомогательной переменной поперечной силы в голени.
Согласно другому аспекту изобретения предусмотрено, что сопротивление изменяют в зависимости от измеряемой температуры. За счет этого можно защищать создающее сопротивление приспособление искусственного ортезного или протезного сустава от слишком сильного нагревания. Нагревание может приводить к выходу из строя сустава, поскольку части сустава теряют форму или структурную прочность или поскольку электроника работает вне допустимых рабочих параметров. При этом сопротивление предпочтительно изменяют так, что уменьшается рассеиваемая энергия. На основании меньшего подлежащего преобразованию количества энергии создающее сопротивление приспособление или другие компоненты искусственного сустава могут охлаждаться и работать в диапазоне температур, для которого они предусмотрены. Кроме того, может быть предусмотрено, что изменения, которые возникают на основании изменения температуры, компенсируются. Если, например, уменьшается вязкость гидравлической жидкости на основании нагревания, то можно соответствующим образом регулировать создающее сопротивление приспособление, с целью обеспечения привычных сопротивлений сгибанию и сопротивлений разгибанию, для того чтобы пользователь протеза или ортеза мог и дальше положиться на известное ему поведение искусственного сустава.
В одном варианте выполнения предусмотрено, что для фазы стояния, например во время ходьбы, при увеличивающейся температуре повышается сопротивление. При этом могут повышаться как сопротивление сгибанию, так и сопротивление разгибанию. За счет повышенного сопротивления пользователь вынужден идти медленнее, и тем самым может вводить меньше энергии в сустав. За счет этого сустав может охлаждаться, так что он может работать внутри допустимых рабочих условий.
В другом варианте выполнения предусмотрено, что при ходьбе для маховой фазы уменьшается сопротивление сгибанию при увеличивающейся температуре. Если в маховой фазе или для маховой фазы уменьшается сопротивление сгибанию, то это приводит к тому, что сустав отклоняется дальше. Тем самым протез ступни позже приходит вперед для наступания на пятку, за счет чего пользователь снова вынужден идти медленнее, что приводит к меньшему преобразованию энергии в тепло.
Сопротивление можно изменять при достижении или при превышении порогового значения температуры. При этом сопротивление можно изменять скачкообразно при достижении или превышении порогового значения температуры, так что происходит переключение значения сопротивления, соответственно, значений сопротивлений. Предпочтительно предусмотрено, что происходит непрерывное изменение сопротивления в зависимости от температуры после достижения порогового значения температуры. Величина порогового значения температуры зависит от соответствующих конструктивных параметров, применяемых материалов и желательной равномерности сопротивления протеза или ортеза. Сопротивление в фазе стояния, среди прочего, не должно повышаться настолько, что за счет этого образуется критическая для безопасности ситуация, например, при подъеме по лестнице.
Вызванное изменением температуры изменение сопротивления не является единственным параметром управления изменением сопротивления, и предусмотрено, что такое вызванное изменением температуры изменение сопротивления накладывается на функциональное изменение температуры. Управление искусственным суставом, например коленным суставом или голеностопным суставом, осуществляется в зависимости от ситуации с помощью множества параметров, так что так называемые функциональные изменения сопротивления, которые происходят, например, на основании скорости ходьбы, ситуации ходьбы или т.п., дополняются изменением сопротивления на основании температуры.
Кроме того, может быть предусмотрено, что при достижении или превышении порогового значения температуры выдается предупреждающий сигнал с целью обращения внимания пользователя протеза или ортеза на то, что сустав или создающее сопротивление приспособление находятся в критическом диапазоне температуры. Предупреждающий сигнал может выдаваться в виде тактильного, оптического или акустического предупреждающего сигнала. Предусмотрены также комбинации различных возможностей подачи сигнала.
Предпочтительно измеряется температура создающего сопротивление приспособления и кладется в основу управления, в качестве альтернативного решения можно осуществлять измерение температуры других приспособлений, когда они имеют критичное к температуре поведение. Если, например, управляющая электроника является особенно чувствительной к температуре, то рекомендуется в качестве альтернативного решения или дополнительно к создающему сопротивление приспособлению контролировать ее и предусматривать в ней соответствующий датчик температуры. Если отдельные компоненты, например, на основании применяемых материалов, чувствительны к температуре, то рекомендуется предусмотрение в соответствующих местах измерительного приспособления с целью получения соответствующих сигналов температуры.
Может быть предусмотрено регулировочное приспособление, с помощью которого изменяется степень изменения сопротивления. Например, на основании определяемых данных, например веса пользователя ортеза или протеза или определяемой осевой силы при наступании, распознавать, что предстоит большое изменение сопротивления. Может быть также предусмотрено управляемое вручную регулировочное приспособление, с помощью которого осуществляется согласование соответствующего изменения сопротивления, так что может выполняться большее или меньшее изменение сопротивления в зависимости от установленных или определяемых данных.
Устройство для выполнения указанного выше способа содержит регулируемое создающее сопротивление приспособление, которое расположено между двумя установленными шарнирно относительно друг друга компонентами искусственного ортезного или протезного сустава, а также управляющий блок и датчики, которые измеряют информацию состояния в устройстве. Предусмотрено регулировочное приспособление, с помощью которого обеспечивается возможность активирования и/или деактивирования изменения сопротивления. За счет этого можно осуществлять, например, выборочно управляемое с помощью температуры изменение сопротивления и, в частности, сознательно активировать или деактивировать режимы, функцию или дополнительную функцию, например, способа управления коленом.
В одной модификации изобретения предусмотрено, что сопротивление сгибанию и/или сопротивление разгибанию согласовывается во время маховой фазы и/или фазы стояния на основе данных датчиков. В то время как из уровня техники известно, после однажды достигаемого устанавливаемого значения для маховой фазы или фазы стояний сохранять его до возникновения новой фазы ходьбы, согласно изобретению предусмотрено, что согласование сопротивления сгибанию и/или сопротивления разгибанию устанавливается изменяемым во время фазы стояния или маховой фазы. Таким образом, во время фазы стояния и/или маховой фазы происходит непрерывно согласование сопротивления при изменяющихся состояниях, например, при увеличивающихся силах, ускорениях или моментах. Вместо установки сопротивления сгибанию и сопротивления разгибанию с помощью порогов переключения, которые после достижения однажды образуют основу для установки соответствующих сопротивлений, согласно изобретению предусмотрено, что осуществляется согласованная установка сопротивлений, например, на основании оценки универсальных характеристик. Предусмотрено, что универсальная характеристика для сопротивления сгибанию устанавливается с помощью рычага колена и угла колена, и управление сопротивлением осуществляется на основе универсальной характеристики.
Для управления искусственными суставами на основании данных датчиков, устанавливают такие датчики, которые как раз необходимы для обеспечения стандарта безопасности при обнаружении переходов между фазами ходьбы. Если применяются выходящие за пределы минимальных требований датчики, например, с целью повышения стандарта безопасности, то эта избыточность датчиков позволяет реализовать управление, которое использует не все расположенные в суставе или на суставе датчики и тем не менее обеспечивает минимальный стандарт безопасности. Предусмотрено использование избыточности датчиков для реализации альтернативных управлений, которые в случае неисправности датчиков все же обеспечивают ходьбу с маховой фазой и минимальный стандарт безопасности.
Кроме того, может быть предусмотрено, что определяют расстояние вектора силы реакции грунта до одной части сустава и уменьшают сопротивление тогда, когда превышается пороговое значение расстояния, т.е. когда расстояние вектора силы реакции грунта составляет больше минимального расстояния до одной части сустава, например до точки на продольной оси голенной части на определенной высоте или до поворотной оси коленного сустава.
Сопротивление сгибанию можно уменьшать в фазе стояния до подходящего для маховой фазы значения, когда определяется, среди прочего, увеличивающийся относительно вертикали угол инерции голенной части. Увеличивающийся угол инерции голенной части указывает на то, что пользователь протеза или пользователь ортеза находится в движении вперед, при этом в качестве центра тяжести принимается дистальный конец голенной части. Предусмотрено, что уменьшение осуществляется лишь тогда, когда увеличение угла инерции лежит выше порогового значения. Кроме того, можно уменьшать сопротивление, когда движение голенной части относительно бедренной части происходит не со сгибанием, т.е. с разгибанием или остается постоянным, что означает движение вперед. Сопротивление можно также уменьшать, когда имеется распрямляющий момент колена.
Может быть предусмотрено, что сопротивление уменьшают в фазе стояния, лишь, когда угол колена составляет меньше 5°. За счет этого исключается, что во время маховой фазы или при согнутом колене сустав не желаемым образом деблокируется.
Сопротивление можно также уменьшать при сгибающем моменте колена на подходящее для маховой фазы значение, когда определяется, что момент колена изменился с вытяжного на сгибающий. При этом уменьшение происходит непосредственно после изменения момента колена с вытяжного на сгибающий.
Кроме того, может быть предусмотрено, что сопротивление после уменьшения снова увеличивают до значения в фазе стояния, когда в течение заданного времени после уменьшения сопротивления не достигается пороговое значение для угла инерции одного компонента сустава, для угловой скорости инерции, для силы реакции грунта, для момента сустава, для угла сустава или для расстояния вектора силы до одного компонента сустава. Другими словами, сустав устанавливают снова в состояние фазы стояния, если в течение заданного времени после смены в состояние маховой фазы действительно не обнаруживают маховую фазу. Это основывается на том, что инициирование маховой фазы происходит уже перед отрывом носка от грунта, с целью обеспечения возможности своевременного инициирования маховой фазы. Однако если маховая фаза затем не будет инициирована, что имеет место, например, при круговом движении, необходимо снова переключаться на обеспечивающее безопасность сопротивление фазы стояния. Для этого предусмотрен таймер, с помощью которого проверяют, имеется ли в течение определенного времени ожидаемое значение для одного из указанных выше параметров. Сопротивление остается уменьшенным, так что остается активированной маховая фаза, когда обнаруживается увеличение угла колена, т.е. когда действительно инициирована маховая фаза. Возможно также, что после достижения порогового значения и деблокирования маховой фазы таймер включается лишь тогда, когда достигается второе пороговое значение, которое меньше первого порогового значения.
Кроме того, согласно изобретению может быть предусмотрено, что сопротивление сгибанию в фазе стояния повышают или не уменьшают, когда определяется уменьшающийся в направлении вертикали угол инерции голенной части и нагрузка на плюсну. За счет связи величины уменьшающегося угла инерции голенной части в направлении вертикали и наличия нагрузки на плюсну можно надежно обнаруживать ходьбу назад и не инициировать маховую фазу, т.е. не уменьшать сопротивление сгибанию, чтобы предотвращать непреднамеренное сгибание коленного сустава, когда при ходьбе назад протез ноги поставлен назад на грунт. За счет этого протезированная нога нагружается в направлении сгибания без подкашивания, так что снабженный протезом или ортезом пациент может идти назад без необходимости активирования особого блокирования.
В одной модификации изобретения предусмотрено, что сопротивление повышается или по меньшей мере не уменьшается, когда угловая скорость инерции одной части сустава опускается ниже порогового значения, или другими словами, что инициируется маховая фаза с уменьшением сопротивления сгибанию, когда угловая скорость инерции превышает заданное пороговое значение. Возможно также, что посредством определения угла инерции одной части сустава, в частности голенной части, и угловой скорости инерции одной части сустава, в частности голенной части, определяется, что пользователь протеза или пользователь ортеза движется назад, и требуется блокированный против сгибания или сильно заторможенный коленный сустав. В соответствии с этим сопротивление, если оно еще не достаточно велико, повышается.
Кроме того, может быть предусмотрено, что определяется ход изменения нагрузки на плюсну, и сопротивление повышается или не уменьшается, когда при уменьшающемся угле инерции голенной части уменьшается нагрузка на плюсну. В то время как при движении вперед после удара пяткой нагрузка на плюсну увеличивается лишь тогда, когда голенная часть поворачивается за вертикаль вперед, при ходьбе назад нагрузка на плюсну уменьшается при уменьшающемся угле инерции, так что при наличии обоих состояний, а именно уменьшающегося угла инерции и уменьшающейся нагрузке на плюсну, можно делать вывод о ходьбе назад. В соответствии с этим сопротивление затем увеличивают до значения, которое предусмотрено для ходьбы назад.
Другим параметром может быть момент колена, который измеряется и служит в качестве основы для повышения или не уменьшения сопротивления. Когда определяется действующий в направлении сгибания момент колена, т.е. когда поставлен протез ступни, и в колене обнаружен сгибающий момент, то имеется ситуация, в которой можно предполагать ходьбу назад, так что в этом случае оправдано блокирование сгибания, т.е. повышение сопротивления до значения, которое не обеспечивает возможность легкого сгибания.
Кроме того, может быть предусмотрено, что определяется точка приложения силы на ступне, и сопротивление повышается или не уменьшается, когда точка приложения силы перемещается в направлении пятки.
Угол инерции голенной части можно определять непосредственно с помощью сенсорного приспособления, которое расположено на голенной части, или же из угла инерции другой соединительной части, например бедренной части, и также определяемого угла сустава. Поскольку угол сустава между бедренной частью и голенной частью можно использовать также для других сигналов управления, то за счет расположения нескольких датчиков и многократного использования сигналов достигается избыточность, так что при выходе из строя одного датчика протез или ортез остается работоспособным. Изменение угла инерции одной части сустава можно определять непосредственно с помощью гироскопа или посредством дифференцирования сигнала угла инерции части сустава или по сигналу угла инерции одной соединительной части и угла сустава.
Ниже приводится более подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых схематично изображено:
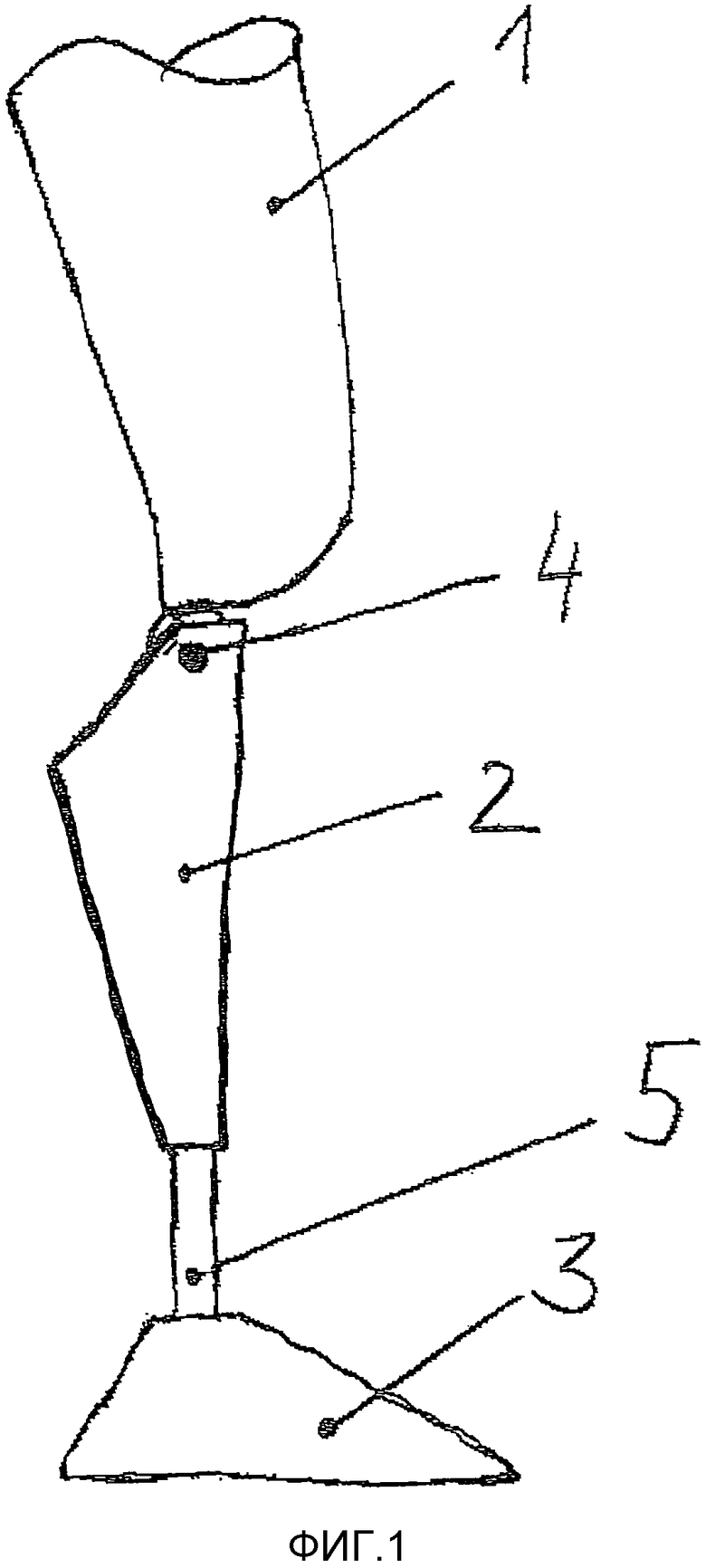
фиг. 1 - протез;
фиг. 2 - схема вычисления расстояния;
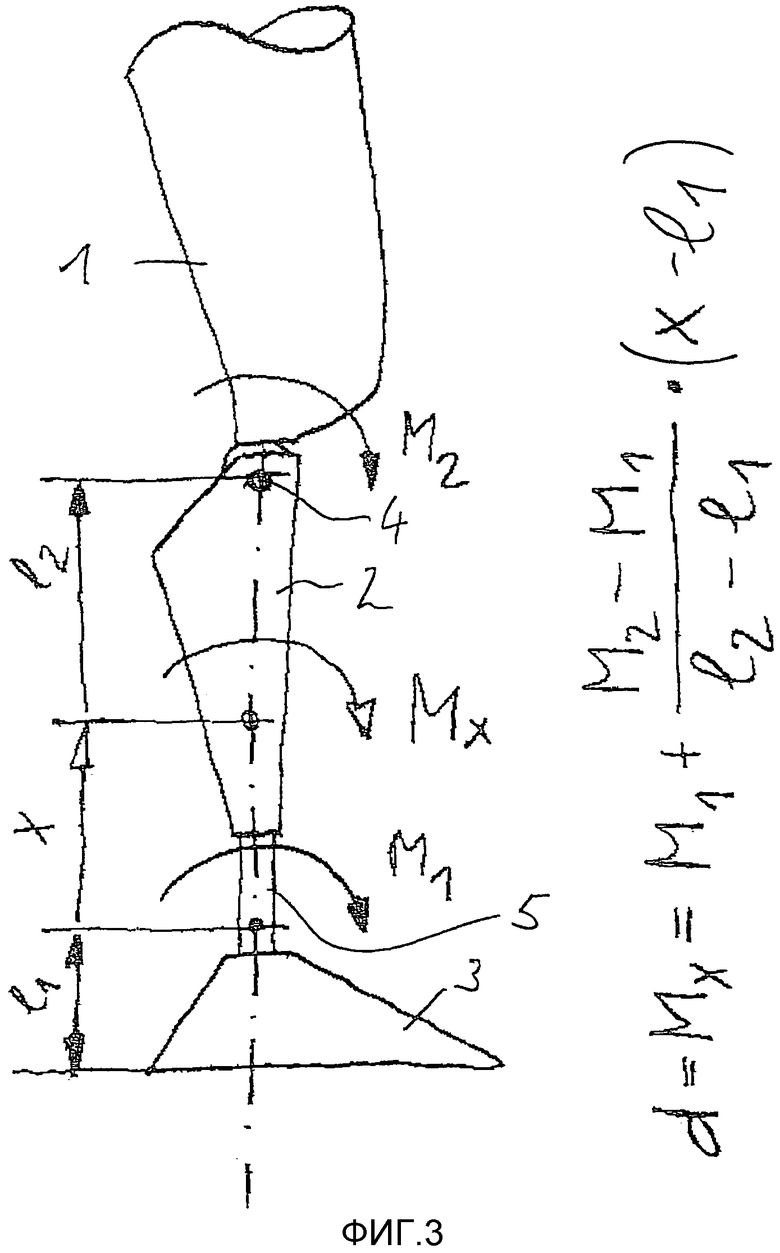
фиг. 3 - схема вычисления момента в сечении;
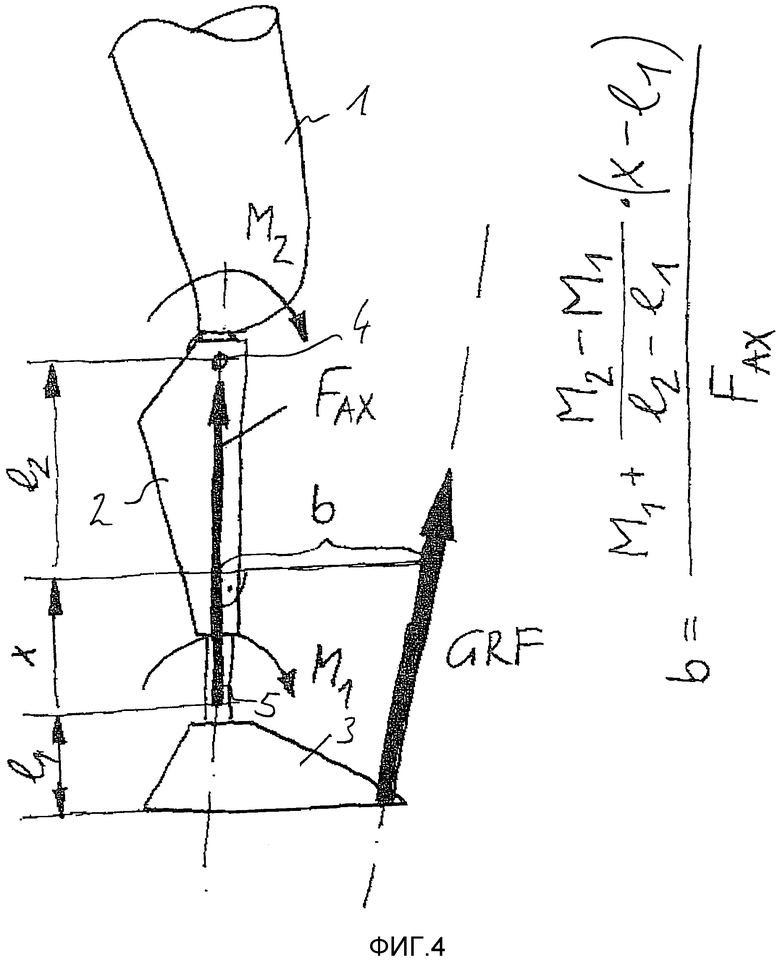
фиг. 4 - схема вычисления расстояния на основании показаний нескольких датчиков;
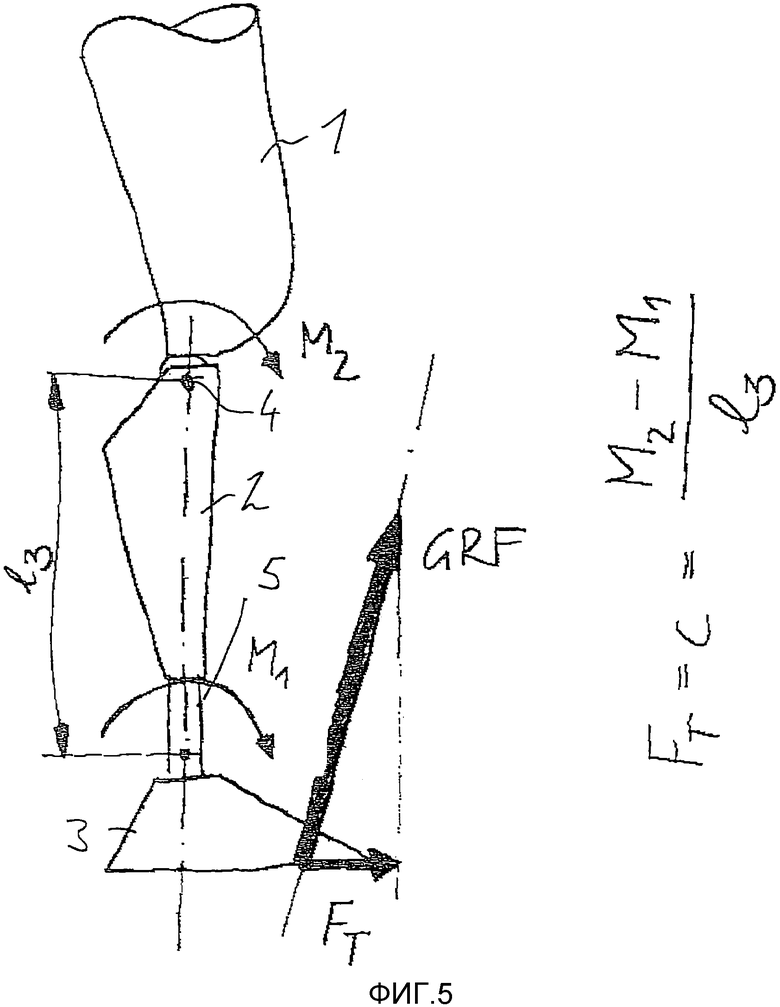
фиг. 5 - схема вычисления поперечной силы;
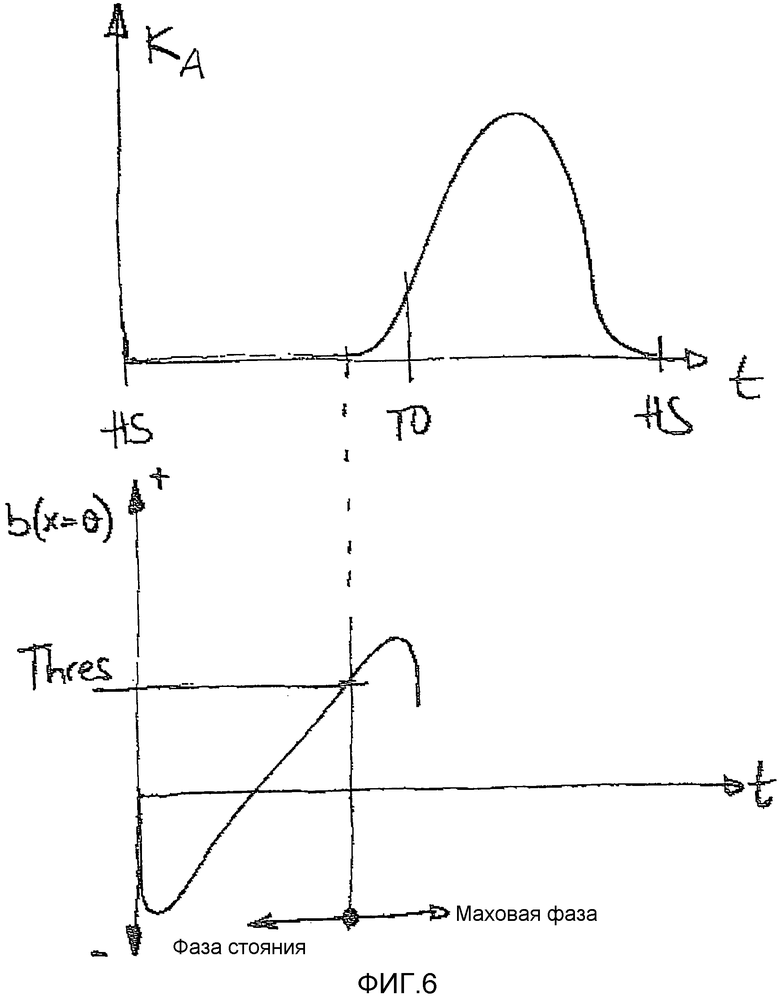
фиг. 6 - ход изменения значения угла колена и вспомогательной переменной во времени;
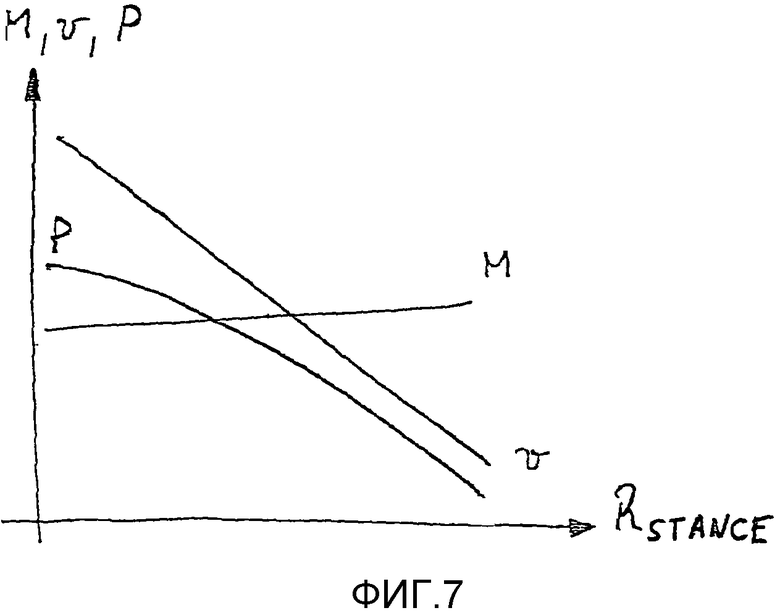
фиг. 7 - изменение параметров при увеличивающемся сопротивлении в фазе стояния;
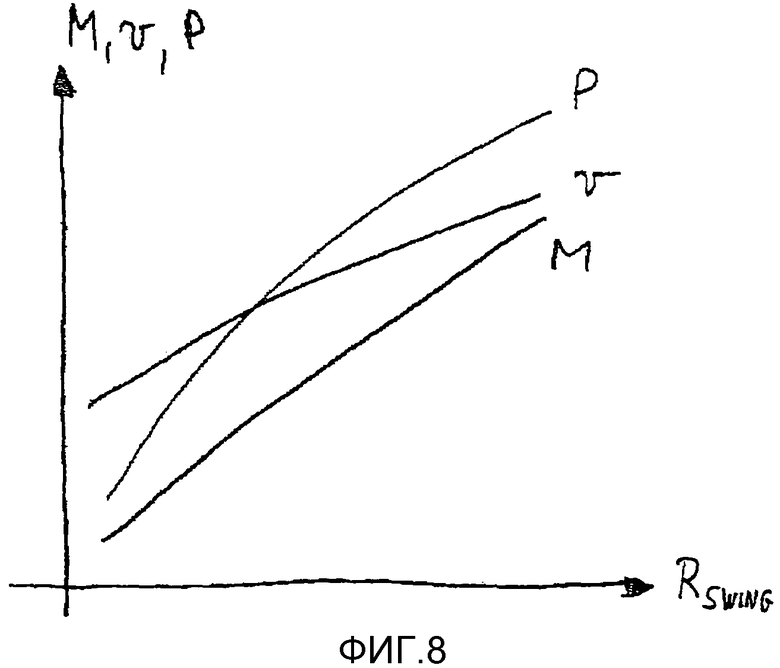
фиг. 8 - изменение параметров при увеличивающемся сопротивлении в маховой фазе;
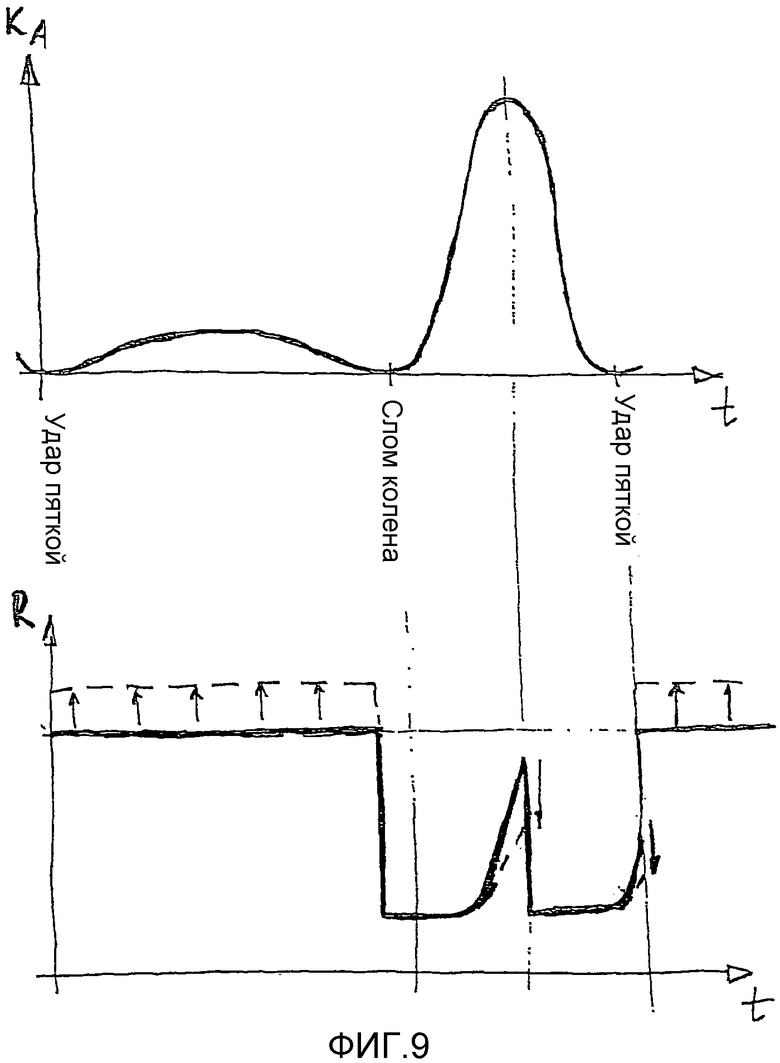
фиг. 9 - ход изменения угла колена и кривая сопротивления при ходьбе по плоскости;
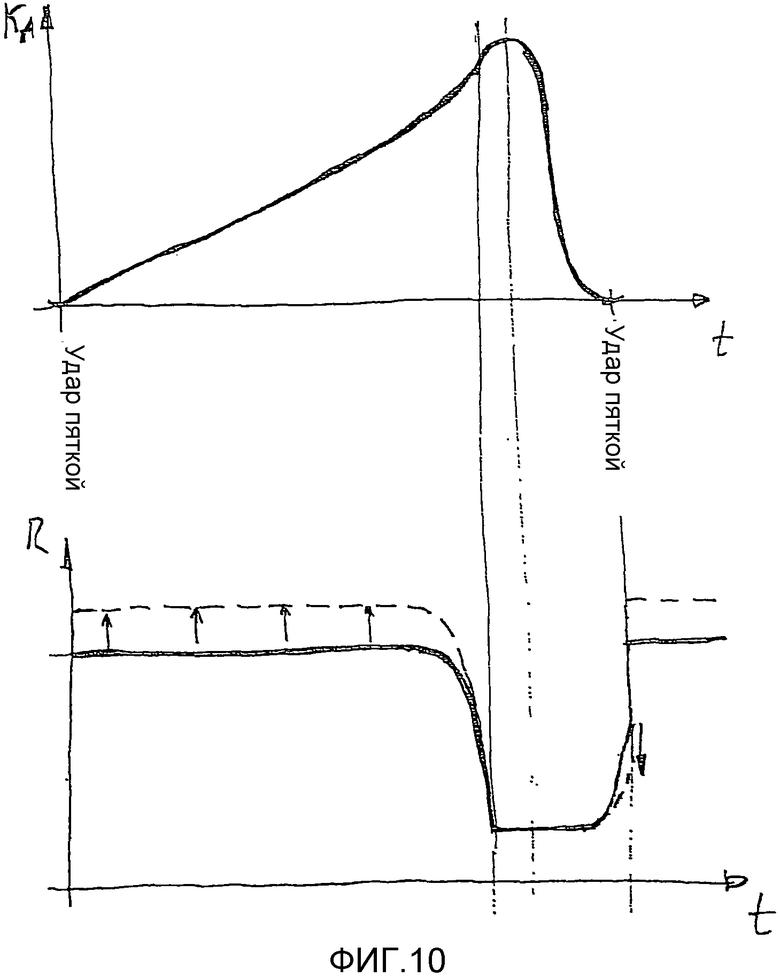
фиг. 10 - ход изменения угла колена и кривая сопротивления при ходьбе по наклонной плоскости;
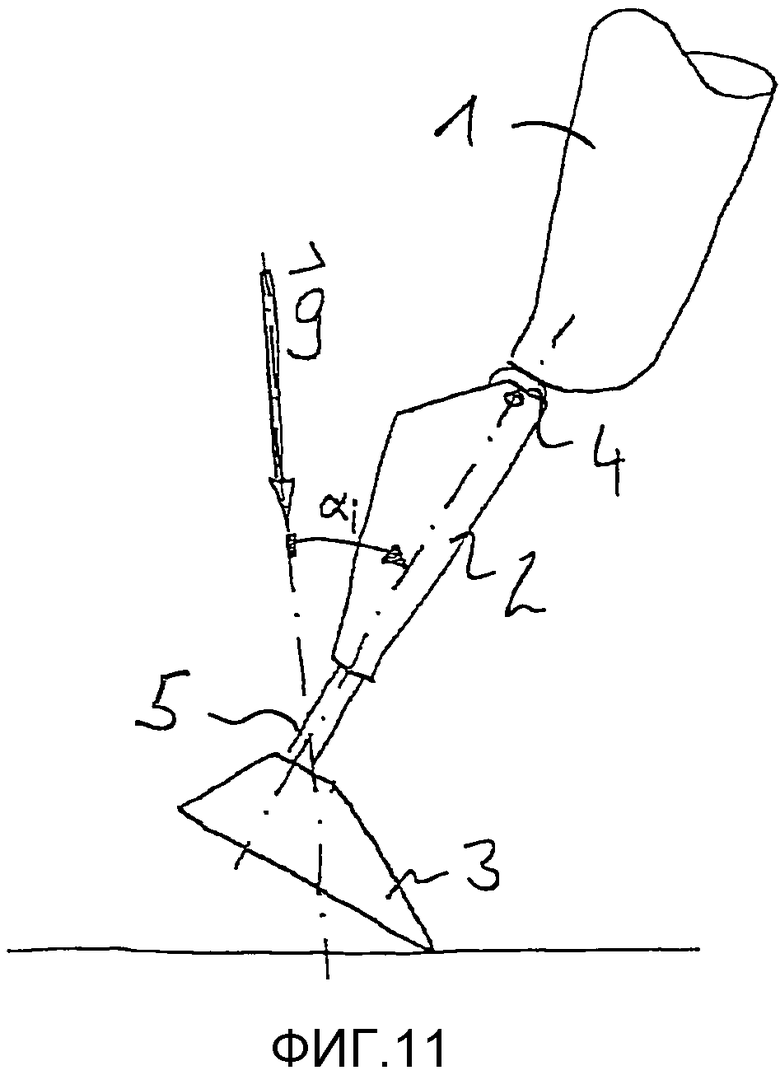
фиг. 11 - принятое определение знаков для угла инерции и протез во время ходьбы назад;
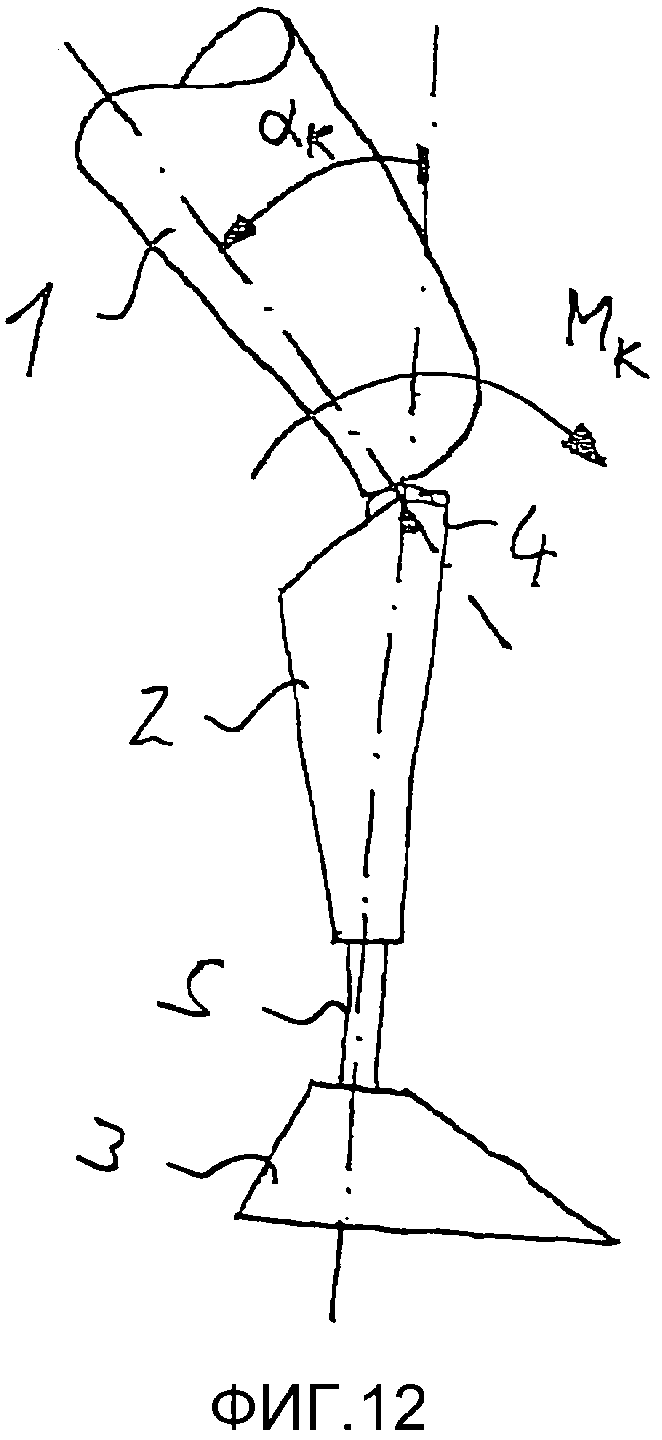
фиг. 12 - принятое определение знаков для угла колена и момента колена;
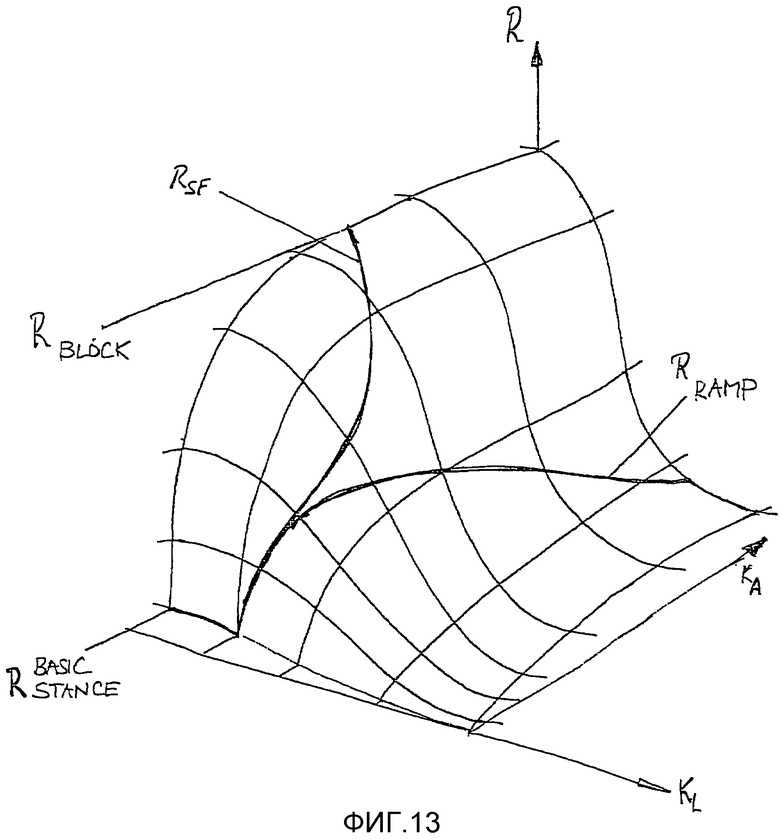
фиг. 13 - универсальная характеристика для сопротивления в зависимости от угла колена и рычага колена;
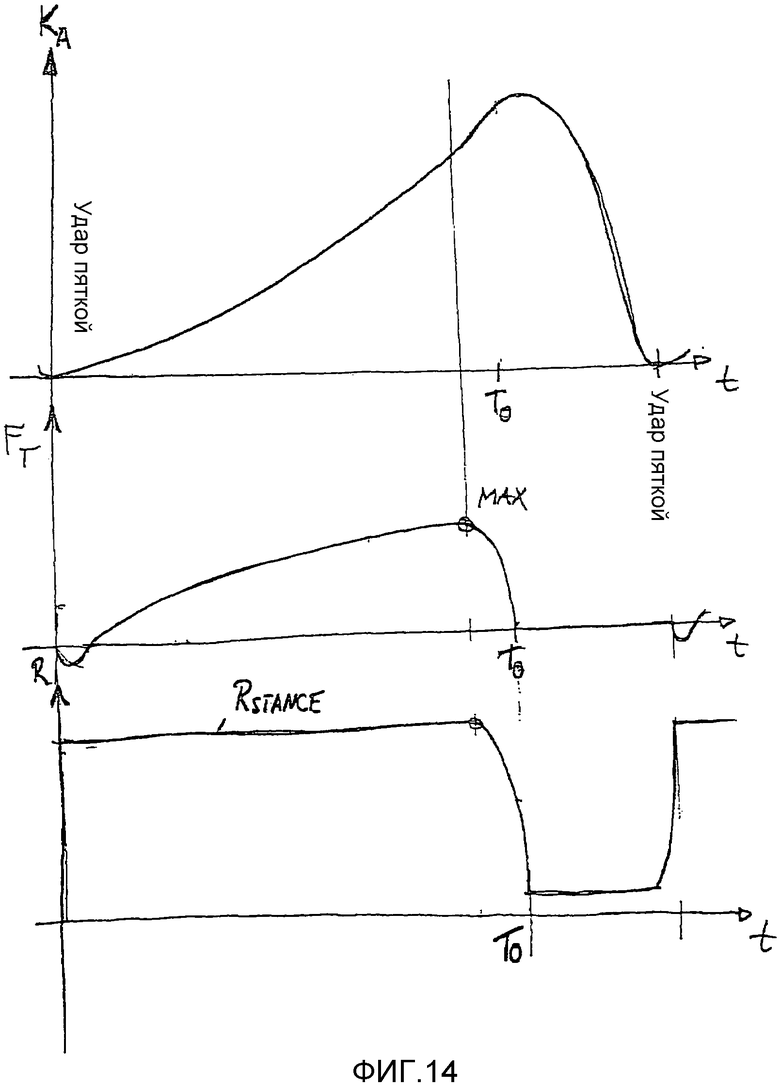
фиг. 14 - параметры при ходьбе по косым плоскостям;
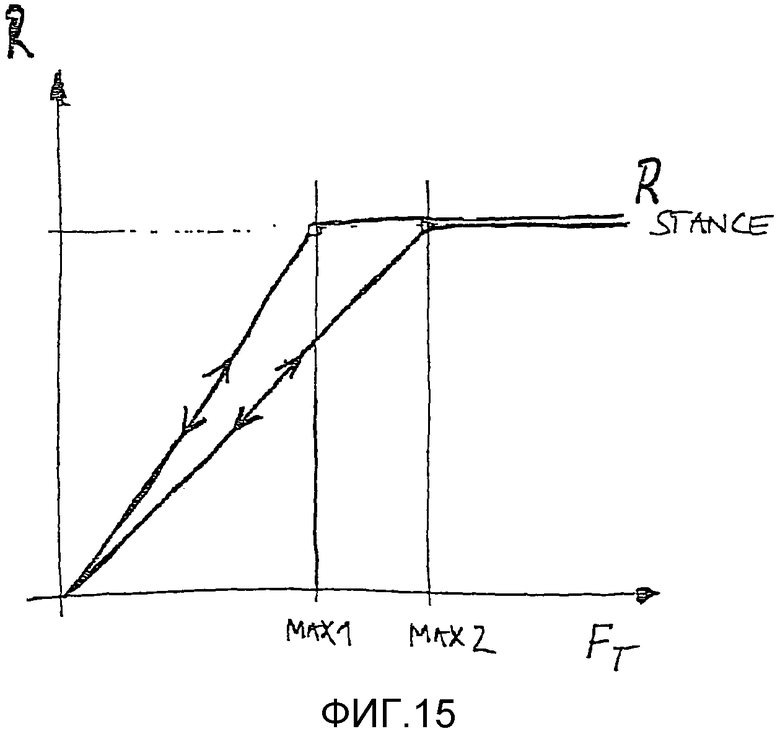
фиг. 15 - ход изменения сопротивления при различных максимумах поперечной силы.
На фиг. 1 схематично показан ножной протез с гильзой 1 для размещения культи бедра. Гильза 1 для бедра называется также верхней соединительной частью. На верхней соединительной части 1 расположена нижняя соединительная часть 2 в виде ножки голени с создающим сопротивление приспособлением. На нижней соединительной части 2 расположен протез 3 ступни. Нижняя соединительная часть 2 закреплена с возможностью поворота на верхней соединительной части 1 с помощью шарнира 4. В шарнире 4 расположен датчик момента, который определяет действующий момент колена. В нижней соединительной части 2 предусмотрена соединительная часть 5 для протеза 3 ступни, в которой расположено приспособление для определения действующей осевой силы, а также момента лодыжки. Могут иметься также датчики угла и/или датчики ускорения. Возможно, что не все датчики имеются в ножном протезе или имеются дополнительные датчики.
В нижней соединительной части 2 находится, наряду с создающим сопротивление приспособлением, которое обеспечивает сопротивление сгибанию и сопротивление разгибанию, вычислительный блок, с помощью которого можно изменять соответствующее сопротивление на основании принимаемых данных датчиков и оценки данных датчиков. Для этого предусмотрено применение данных датчиков для создания по меньшей мере одной вспомогательной переменной, которая получается посредством математической связи данных двух или больше датчиков. За счет этого можно связывать друг с другом несколько датчиков силы или момента с целью вычисления расстояний и/или моментов, которые действуют не непосредственно в зоне датчиков. Так, например, можно вычислять силы в сечении, моменты в сечении или расстояния в определенных плоскостях отсчета с целью обеспечения возможности, исходя из этого, оценки, какие функции необходимо выполнять в данный момент времени для достижения возможно более естественной походки. При этом функциями называются те процессы управления, которые возникают в рамках естественного движения, в противоположность этому режим является состоянием управления, которое устанавливается с помощью произвольного действия, например посредством приведения в действие особого переключателя или за счет осмысленной, возможно осмысленно неестественной последовательности движений.
На фиг. 2 схематично показано, как в качестве вспомогательной переменной применяется расстояние а вектора силы GRF реакции грунта до датчика момента. Вспомогательная переменная а является в данном случае так называемым рычагом колена, который показан также на фиг. 13 и приведено его описание в связи с управлением универсальной характеристикой, однако там с противоположным знаком. Расстояние а вычисляется из частного момента М колена и осевой силы FAX. Чем больше момент М колена относительно осевой силы FAX, тем больше расстояние а вектора силы GRF реакции грунта на высоте отсчета, которую в данном случае образует ось колена. На основании вспомогательной переменной а можно изменять сопротивление разгибанию и/или сопротивление сгибанию, поскольку с помощью вспомогательной переменной а можно вычислять, находится ли протез в фазе стояния или маховой фазе и в какой стадии, так что, исходя из этого, устанавливается заранее заданное сопротивление сгибанию и/или сопротивление разгибанию. За счет изменения вспомогательной переменной а можно определять, как проходит движение в данный момент времени, так что внутри фазы стояния или маховой фазы может происходить согласование сопротивления разгибанию и/или сопротивления сгибанию. Изменение сопротивлений происходит предпочтительно непрерывно и в зависимости от изменения вспомогательной переменной или вспомогательных переменных.
На фиг. 3 показано определение вспомогательной переменной d в виде внутреннего момента МХ на высоте х от грунта. В показанном примере вычисление осуществляется на высоте ступни, так что для величины х может быть принято значение 0. Момент МХ в сечении, который определяется на высоте х нижней соединительной части 2, вычисляется по формуле:
d=MX=[M1+{(M2-M1)/(l2-l1)}*(x-l1)],
где М1 является моментом в соединительной части 5, т.е., как правило, моментом лодыжки, М2 является моментом колена, длина l1 является расстоянием датчика момента лодыжки от грунта, длина l2 является расстоянием датчика момента колена от грунта, длина х представляет высоту отсчета над грунтом, на которой должен вычисляться момент МХ в сечении. В данном случае вычисление вспомогательной переменной d осуществляется лишь на основе измерения с помощью двух датчиков момента и указанной выше математической связи. На основании момента МХ в сечении можно делать вывод о нагрузке внутри нижней соединительной части 2, из чего можно вычислять нагрузку внутри нижней соединительной части 2, соответственно, соединительной части 5. В зависимости от величины и ориентации момента в сечении можно распознавать различные сценарии нагрузки, которые требуют согласованной установки сопротивления сгибанию и/или сопротивления разгибанию. На основе действующего в данный момент времени момента MX в сечении, который в качестве вспомогательной переменной d заносится в блок управления, можно затем в реальном времени осуществлять необходимое регулирование в создающем сопротивление приспособлении с целью установки соответствующего сопротивления.
На фиг. 4 показано, как вычисляется другая вспомогательная переменная b в виде расстояния вектора силы GRF реакции грунта до оси, в данном случае до линии соединения обоих приспособлений для измерения моментов на высоте отсчета. Вспомогательная переменная b вычисляется по формуле:
b=[M1+{(M2-M1)/(l2-l1)}*(x-l1)]/FAX,
где М1 является действующим моментом в соединительной части 5, например моментом лодыжки на высоте l1 от пола, М2 является моментом колена на высоте оси 4 колена, которая лежит на расстоянии l2 от пола. Величина х представляет высоту отсчета от грунта, FAX является действующей внутри соединительной части 5, соответственно, в нижней соединительной части 2 осевой силой. За счет изменения вспомогательной переменной b можно, как указывалось выше, непрерывно регулировать как во время маховой фазы, так и во время фазы стояния соответствующие сопротивления и согласовывать с имеющимися изменениями. За счет этого можно активировать различные функции, которые распознаются автоматически, например функцию стояния, за счет чего, например, предотвращается непреднамеренное подкашивание коленного сустава. В специальном случае эта вспомогательная переменная используется на высоте х=0 для инициирования маховой фазы.
Для оценки с целью инициирования маховой фазы можно использовать не только превышение порогового значения для вспомогательной переменной b(x=0), но также и тенденцию. Так, при ходьбе назад необходимо принимать обратный ход изменения вспомогательной переменной, т.е. смещение точки приложения силы от пальцев к пятке. В этом случае не должно происходить уменьшение сопротивления.
На фиг. 5 схематично показано, как вычисляется поперечная сила или тангенциальная сила FT в качестве четвертой вспомогательной переменной с для использования в способе управления коленом. Тангенциальная сила FT и тем самым вспомогательная переменная с получается из частного разницы между моментом М2 колена и момента М1 лодыжки к расстоянию l3 между датчиком момента колена и датчиком момента лодыжки по формуле:
с=FT=(M2-M1)/l3
С помощью вспомогательной переменной с можно, например, непрерывно уменьшать сопротивление сгибанию в конечной фазе стояния при ходьбе по косым плоскостям при уменьшающейся вспомогательной переменной с целью обеспечения возможности более легкого маха сустава.
На фиг. 6 в качестве примера показано, как можно использовать вспомогательную переменную для определения инициирования маховой фазы. На верхнем графике показано изменение угла КА колена в зависимости от времени t, начиная от удара HS пяткой, и остающимся по существу одинаковым углом колена во время фазы стояния, до сгибания колена незадолго до поднимания плюсны в момент времени ТО. Во время маховой фазы затем угол КА колена увеличивается, пока он после продвижения вперед ступни до упора разгибания не станет, снова равным 0 и пятка снова не оказывается на грунте.
Под графиком изменения угла колена в зависимости от времени t показано значение расстояния b вектора силы реакции грунта от оси голенной части, согласно фиг. 4, на высоте отсчета х=0. Как только вспомогательная переменная b достигает порогового значения THRES, то это является для блока управления сигналом для установки сопротивлений так, что они пригодны для маховой фазы, например, посредством уменьшения сопротивления сгибанию для облегчения сгибания незадолго перед отрывом плюсны от грунта. При этом уменьшение сопротивления может осуществляться непрерывно, а не внезапно. Возможно также, что когда вспомогательная переменная b снова изменяется и принимает не предусмотренный ход изменения, то сопротивления снова соответствующим образом согласовываются, например сопротивление повышается или даже блокируется коленный сустав.
Наряду с указанным управлением функциями с помощью вспомогательной переменной можно применять несколько вспомогательных переменных для управления искусственным суставом с целью получения точного согласования с естественным движением. Кроме того, можно использовать другие элементы или параметры для управления протезом или ортезом, которые нельзя выводить непосредственно из вспомогательной переменной.
На фиг. 7 показан в качестве примера график зависимости параметров момент М колена, мощность Р и скорость v от сопротивления RSTANCE в фазе стояния протеза коленного сустава. При этом в протезе коленного сустава расположены создающее сопротивление приспособление и исполнительный механизм, с помощью которого можно изменять сопротивление, которое противодействует сгибанию и/или разгибанию. Наряду с протезом можно применять также выполненный соответствующим образом ортез, возможны также другие суставные приспособления в качестве области применения, например тазобедренные и голеностопные суставы. В создающем сопротивление приспособлении, как правило, механическая энергия преобразуется в термическую энергию с целью торможения голенной части относительно бедренной части, что относится, соответственно, также к другим суставам.
При этом температура создающего сопротивление приспособления зависит от величины мощности Р, которая прикладывается во время фазы стояния. Мощность Р зависит от действующего момента М колена и скорости v, с которой сгибается коленный сустав. Эта скорость зависит в свою очередь от сопротивления RSTANCE, с которым не изображенное создающее сопротивление приспособление противодействует соответствующему движению в фазе стояния. Если в фазе стояния после удара пяткой повышается сопротивление сгибанию и в дальнейшем ходе при начинающемся движении разгибания повышается сопротивление разгибанию, то уменьшается скорость движения компонентов сустава относительно друг друга и тем самым также скорость движения создающего сопротивление приспособления. За счет уменьшения скорости v, которое сильнее, чем легкое нарастание момента М, уменьшается мощность Р в фазе стояния, так что подлежащая преобразованию энергия соответственно уменьшается при уменьшающейся мощности Р. В соответствии с этим уменьшается при остающемся постоянным охлаждении температура создающего сопротивление приспособления или тех компонентов, которые контролируются относительно температуры.
На фиг. 8 показана корреляция указанных параметров с сопротивлением RSWING в маховой фазе. При уменьшении сопротивления R во время маховой фазы уменьшается скорость v ходьбы, момент М колена и тем самым также создаваемая мощность Р, так что уменьшается подлежащая преобразованию энергия. В соответствии с этим уменьшается температура создающего сопротивление приспособления при уменьшающемся сопротивлении в фазе стояния. Осуществляемое с помощью температуры управление фазой стояния и/или маховой фазой можно выполнять дополнительно к управлению с помощью указанных выше вспомогательных переменных или же отдельно от него.
На фиг. 9 показан график изменения угла КА колена во времени t, начиная с так называемого удара пяткой, который, как правило, происходит при вытянутом коленном суставе. Во время постановки ступни происходит небольшое сгибание коленного сустава, так называемое сгибание фазы стояния, с целью смягчения постановки ступни и удара пяткой. После полной постановки ступни коленный сустав полностью вытянут до так называемого слома колена, при котором коленный сустав подкашивается с целью перемещения коленного сустава вперед и переката через плюсну. Исходя от слома колена, увеличивается угол КА колена до максимального угла колена в маховой фазе, чтобы затем снова после продвижения вперед согнутой ноги и протеза ступни перейти в вытянутое положение с целью постановки снова пятки. Этот ход изменения угла колена является типичным для ходьбы по плоскости.
На нижнем графике показано изменение сопротивления R во времени в соответствии с углом колена. Из этого графика следует, как сказывается изменение сопротивления в маховой фазе и фазе стояния, которые осуществляются обе, например, на основе вызываемого температурой изменения сопротивления. Наличие сопротивления сгибанию или сопротивления разгибанию зависит от хода изменения угла колена, при увеличивающемся угле КА колена действует сопротивление сгибанию, при уменьшающемся угле колена действует сопротивление разгибанию. После удара пяткой имеется относительно высокое сопротивление сгибанию, после поворота движения действует высокое сопротивление разгибанию. При сломе колена уменьшается сопротивление для облегчения сгибания и продвижения вперед колена. За счет этого облегчается ходьба. После уменьшения сопротивления после слома колена, сопротивление удерживается во время части маховой фазы на низком уровне с целью облегчения маха ступни назад. Для того чтобы маховое движение не было слишком большим, перед достижением максимума угла колена повышается сопротивление сгибанию и после достижения максимума угла колена и поворота движения уменьшается сопротивление разгибанию на более низкий уровень сгибания маховой фазы. Уменьшение сопротивления разгибанию сохраняется также при движении разгибания в маховой фазе почти до удара пяткой. Незадолго перед достижением полного разгибания сопротивление снова увеличивается с целью предотвращения жесткого удара в упор разгибания. Для обеспечения при постановке протеза ступни достаточной надежности от неконтролируемого подкашивания, сопротивление сгибанию также находится на высоком уровне.
Если теперь повышается сопротивление сгибанию, что представлено штриховой линией, то скорость угла колена уменьшается и тем самым становится медленней также ходьба пользователя протеза. После удара пяткой происходит лишь сравнительно небольшое сгибание в фазе стояния и медленное разгибание, так что рассеивается меньше энергии. Повышение сопротивления сгибанию перед достижением максимума угла колена происходит менее выраженным образом, чем при стандартном демпфировании, что показано с помощью направленной вниз стрелки. За счет этого голень и тем самым протез ступни совершает большее маховое движение, так что имеется больший промежуток времени между ударами пяткой. Уменьшение сопротивления сгибанию в маховой фазе также приводит к уменьшению скорости ходьбы.
В конце разгибания маховой фазы, т.е. незадолго перед постановкой ступни и удара пяткой, уменьшается сопротивление сгибанию по сравнению со стандартным уровнем. Таким образом, предусмотрено, что сопротивление сгибанию уменьшается, так что голенная часть скорее достигает разгибания. Для предотвращения жесткого удара в упор разгибания пользователь протеза идет медленнее, так что мощность Р и подлежащая рассеянию энергия уменьшается. Во время фазы стояния между ударом пяткой и сломом колена могут быть повышены как сопротивление сгибанию, так и сопротивление разгибанию для замедления легкого движения сгибания и разгибания с целью уменьшения за счет этого скорости ходьбы.
На фиг. 10 в верхней части показан ход изменения угла колена при ходьбе по наклонной плоскости, в данном случае на наклоненной вниз плоскости. После удара пяткой происходит непрерывное увеличение угла КА колена до максимума угла колена без слома колена. Это объясняется тем, что при ходьбе на наклонной поверхности колено не достигает полного разгибания. После достижения максимума угла колена происходит быстрое продвижение вперед колена и голенной части до полного разгибания, которое сопровождается ударом пяткой. При этом сопротивление сгибанию остается в течение длительного времени на постоянно высоком уровне, пока оно затем не падает для обеспечения большого сгибания колена и тем самым подъема ступни и махового движения. Это маховое движение происходит после достижения минимума сопротивления вплоть до достижения максимума угла колена. Затем сопротивление сгибанию удерживается на низком уровне, пока оно незадолго до постановки ступни снова повышается.
Если в создающем сопротивление приспособлении имеются повышенные температуры, то повышаются сопротивления в фазе стояния, с целью обеспечения медленной скорости ходьбы и медленного сгибания. После достижения максимального угла сгибания в маховой фазе уменьшается при переносе вперед протеза ступни сопротивление разгибанию по сравнению с нормальной функцией, что также приводит к уменьшению рассеиваемой энергии.
Наряду с обычными ситуациями движения, в которых пациент движется вперед, в каждодневном движении имеются также многие другие ситуации, на которые необходимо реагировать с помощью согласованного управления.
На фиг. 11 показан протез в ситуации, в которой обычно при ходьбе вперед инициируется маховая фаза. В этой ситуации пациент стоит еще на плюсне и имеет намерение затем сгибать бедро, так чтобы сгибалось также колено. Однако в ту же ситуацию пациент попадает также при ходьбе назад. Исходя из ситуации стояния, при ходьбе назад нога, в данном случае протез, ставится назад, т.е. противоположно нормальному направлению взгляда пользователя протеза. За счет этого получается, что угол αI инерции голенной части 2 относительно направления силы тяжести, которая представлена вектором g силы тяжести, сначала увеличивается до постановки протеза 3 ступни на грунт. При этом в качестве точки поворота или центра тяжести для движения и для определения увеличивающегося угла αI инерции принимается тазобедренный сустав. Продольное направление или продольная ось голенной части 2 проходит через поворотную ось протеза 4 коленного сустава и предпочтительно также через поворотную ось сустава лодыжки или же центрально через место соединения между протезом 3 ступни и голенной частью 2. Угол αI инерции голенной части 2 можно определять непосредственно с помощью расположенного на голенной части 2 сенсорного приспособления, в качестве альтернативного решения, его можно определять с помощью датчика на бедренной части 1 и датчика угла колена, который измеряет угол между бедренной частью 1 и голенной частью 2.
Для определения угловой скорости инерции определяется изменение угла αI инерции во времени, так что получается угловая скорость ωI инерции, которую можно определять по величине и направлению. Если имеется определенный угол αI инерции и определенная угловая скорость ωI инерции, то инициируется маховая фаза, если превышается определенное пороговое значение для угловой скорости ωI инерции. Если имеется уменьшающийся угол αI инерции и, кроме того, еще нагрузка на плюсну, то можно делать вывод о ходьбе назад, так что сопротивление сгибанию не уменьшается, а сохраняется или повышается, чтобы не инициировать сгибание в маховой фазе.
Для определения угловой скорости инерции можно применять непосредственно гироскоп или определять изменение угла αI инерции во времени, которое можно определять по величине и направлению. Если имеется определенный угол αI инерции и определенная угловая скорость ωI инерции, то инициируется маховая фаза, если превышается определенное пороговое значение для угловой скорости ωI инерции. Если имеется уменьшающийся угол αI инерции и, кроме того, еще нагрузка на плюсну, то можно делать вывод о ходьбе назад, так что сопротивление сгибанию не уменьшается, а сохраняется или повышается, чтобы не инициировать сгибание в маховой фазе.
На фиг. 12 показан протез в плоско установленном на грунт положении. Изображение служит, в частности, для определения момента колена и угла колена, а также применяемых знаков в описании. При этом угол αK колена соответствует углу между бедренной частью 1 и голенной частью 2. Вокруг шарнирной оси протеза 4 коленного сустава действует момент МК колена. Инициирование маховой фазы может быть дополнено другими критериями, например, тем, что момент МК колена должен быть вытяжным, т.е. положительным или равным нулю, что угол КА колена почти равен нулю, т.е. что колено вытянуто, и/или что угловая скорость колена равна нулю или является вытяжной.
Элегантным способом учета различных параметров и связей параметров является использование универсальной характеристики. Универсальная характеристика обеспечивает возможность, в отличие от управляемого с помощью порогового значения переключения, установки изменяемых и согласованных с ходом изменения или с комбинациями универсальных характеристик сопротивлений. При этом можно также применять вспомогательные переменные, как указывалось выше.
На фиг. 13 показана универсальная характеристика для управления ходьбой по плоскости, которая создана для определения подлежащего установке расстояния R. Универсальная характеристика построена для сопротивления R, угла КА колена, а также рычага KL колена. Рычаг KL колена является нормальным расстоянием суммарной силы реакции грунта до оси колена и может быть вычислен посредством деления действующего момента на действующую осевую силу, как было пояснено применительно к фиг. 2. Там рычаг колена определялся в качестве вспомогательной переменной а, однако с противоположным знаком. В качестве максимального значения для сопротивления R принимается величина, при которой без разрушения компонента сустава, в данном случае коленный сустав нельзя сгибать или можно лишь очень медленно сгибать. Когда рычаг KL колена, равный -а, после начального увеличения стремится к нулю, а голень была явно опрокинута назад, что является типичным для ходьбы по плоскости, повышается сопротивление R сгибанию, исходя из исходного сопротивления сгибанию, вплоть до максимального угла сгибания фазы стояния, равного, например, 15° или слегка меньше, при увеличивающемся угле колена вплоть до сопротивления RBLOCK блокирования. Такая кривая показана в качестве кривой нормального сгибания RSF фазы стояния на фиг. 13. Таким образом, создающее сопротивление приспособление ограничивает сгибание фазы стояния при ходьбе по плоскости. Однако когда рычаг KL колена увеличивается, то сопротивление сгибанию снова повышается. Это поведение соответствует, например, ходьбе назад по наклонной поверхности или при торможении и обозначено как RRAMP. С помощью универсальной характеристики становится возможным непрерывный переход между ходьбой по плоскости и ходьбой по наклонной поверхности. Поскольку применяется универсальная характеристика, а не пороговое значение, возможен также в продвинутой стадии фазы стояния переход между ходьбой по плоскости и ходьбой по наклонной поверхности.
На фиг. 14 показаны характеристические параметры угол КА колена, тангенциальная сила FT, а также сопротивление R сгибанию в зависимости от времени t при ходьбе по косым плоскостям, в данном случае при ходьбе вниз. После удара пяткой непрерывно повышается угол КА колена до момента времени ТО подъема ступни. После этого угол КА колена увеличивается еще раз с целью приведения в маховой фазе голенной части ближе к бедренной части для обеспечения возможности перестановки ступни вперед. После достижения максимального угла КА колена, голенная часть переводится вперед, угол КА колена уменьшается до нуля, так что нога снова находится в вытянутом состоянии, в котором ставится на поверхность пятка, так что может начинаться новый цикл шага.
Тангенциальная сила FT или поперечная сила после удара пяткой принимает отрицательное значение, проходит через нуль после полной постановки ступни и затем увеличивается до максимального значения незадолго до поднимания ступни. После поднимания ступни в момент времени ТО тангенциальная сила FT равна нулю вплоть до нового удара пяткой.
Сопротивление R сгибанию остается вплоть до максимума поперечной силы FT почти постоянным и очень высоким для противодействия действующей при ходьбе вниз в направлении сгибания силе, для того чтобы пациент разгружался и не должен был компенсировать маховое движение искусственного колена. После достижения максимума поперечной силы, который лежит перед подниманием ступни, сопротивление R сгибанию уменьшается с тангенциальной силой, с целью обеспечения возможности более легкого сгибания коленного сустава. После поднимания плюсны в момент времени ТО, сопротивление R сгибанию имеет свое минимальное значение, для того чтобы голенная часть могла снова легко совершать маховое движения назад. Если голень переносится вперед, то действует сопротивление разгибанию, которое для полноты показано на этом графике. При уменьшающемся угле колена сопротивление R является сопротивлением разгибанию, которое перед достижением новой постановки ступни, т.е. незадолго перед новым ударом пяткой, повышается до максимального значения, с целью обеспечения демпфирования разгибания, для того чтобы коленный сустав не перемещался к упору разгибания без демпфирования. Сопротивление сгибанию повышается до высокого значения, с целью обеспечения непосредственно после удара пяткой необходимого действующего сопротивления сгибанию.
На фиг. 15 показано соотношение между подлежащим установке сопротивлением R и различными максимумами поперечной силы. При этом уменьшение сопротивления приведено к максимуму поперечной силы. За счет этого должно достигаться, что сопротивление уменьшается с высокого значения до низкого значения, в то время как поперечная сила падает от максимума до нуля. Таким образом, уменьшение не зависит от высоты максимума поперечной силы. Оно проходит от сопротивления фазы стояния до минимального сопротивления, в то время как поперечная сила проходит от максимума до нуля. Если поперечная сила должна снова увеличиваться, то снова повышается сопротивление, т.е. пользователь протеза может снова сильнее нагружать сустав, если он должен прекратить движение. В этом случае также возможен непрерывный переход между легким маховым движением и новой нагрузкой без применения дискретного критерия переключения.
Изобретение относится к медицине, а именно к способу управления ортезом или протезом сустава нижней конечности. Способ содержит создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков. Причем во время использования сустава с помощью датчиков обеспечивается информация состояния. Посредством датчиков по меньшей мере одного приспособления для измерения моментов и/или сил определяют по меньшей мере один момент и одну силу, или два момента и одну силу, или две силы и один момент. Данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию. Причем в качестве вспомогательной переменной вычисляют расстояние вектора силы реакции грунта от приспособления для измерения моментов и/или сил посредством деления момента на силу. Использование изобретения обеспечивает возможность согласования в зависимости от ситуации сопротивления сгибанию и сопротивления разгибанию. 4 н. и 45 з.п. ф-лы, 15 ил.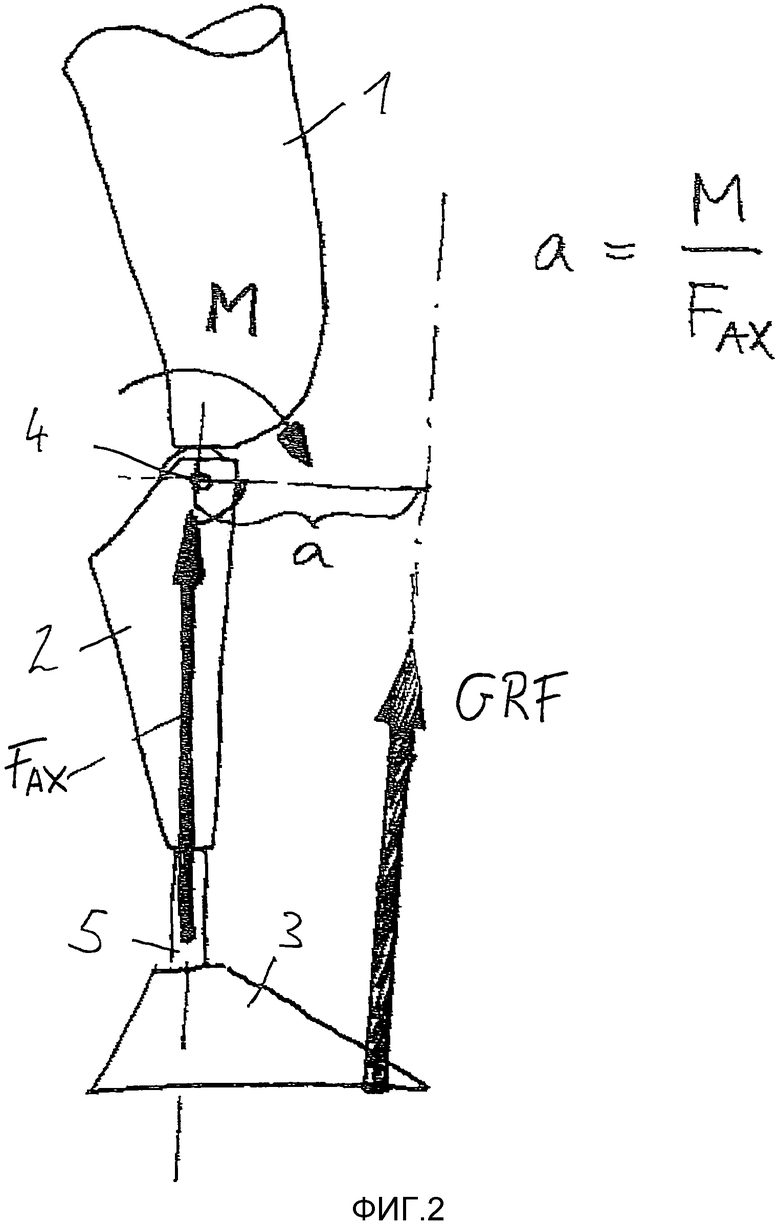
1. Способ управления ортезом или протезом сустава нижней конечности, содержащим создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния, отличающийся тем, что посредством датчиков по меньшей мере одного приспособления для измерения моментов и/или сил определяют по меньшей мере:
- один момент и одну силу, или
- два момента и одну силу, или
- две силы и один момент,
и данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию, причем в качестве вспомогательной переменной вычисляют расстояние вектора силы реакции грунта от приспособления для измерения моментов и/или сил посредством деления момента на силу.
2. Способ по п. 1, отличающийся тем, что данные датчиков складывают, умножают друг с другом, вычитают друг из друга и/или делят друг на друга.
3. Способ по п. 1, отличающийся тем, что в качестве вспомогательной переменной определяют расстояние вектора силы до оси в положении отсчета, момент в сечении в положении отсчета или силу в сечении.
4. Способ по п. 1, отличающийся тем, что расстояние вектора силы до оси сустава вычисляют посредством деления момента сустава на осевую силу.
5. Способ по п. 1, отличающийся тем, что в качестве приспособления для измерения моментов и/или сил применяют датчик момента лодыжки и/или датчик момента колена.
6. Способ по любому из пп. 1-5, отличающийся тем, что при достижении или превышении заданного значения для вспомогательной переменной переключают создающее сопротивление приспособление в состояние маховой фазы.
7. Способ по любому из пп. 1-5, отличающийся тем, что сопротивление сгибанию уменьшают при уменьшающемся значении вспомогательной переменной.
8. Способ по п. 1, отличающийся тем, что на ортезе или протезе располагают датчики для определения угла колена, угловой скорости колена, положения бедра, положения голени, изменения этих положений и/или ускорения ортеза или протеза, и их данные используют для управления сопротивлением.
9. Способ по п. 1 или 2, отличающийся тем, что измерение данных и вычисление, а также изменение сопротивления осуществляют в реальном времени.
10. Способ по п. 9, отличающийся тем, что изменение сопротивления выполняют непрерывно.
11. Способ по любому из пп. 1-3 или 10, отличающийся тем, что при определяемом увеличении вспомогательной переменной повышают сопротивление вплоть до блокирования сустава.
12. Способ по любому из пп. 1-3, отличающийся тем, что при определяемом уменьшении силы реакции грунта в ортезе или протезе уменьшают сопротивление, а при увеличивающейся силе реакции грунта повышают сопротивление вплоть до блокирования сустава.
13. Способ по п. 12, отличающийся тем, что блокирование снимают, когда изменяется вспомогательная переменная.
14. Способ по п. 12, отличающийся тем, что сопротивление после повышения уменьшают на основе измеряемого положения ортеза или протеза в пространстве или за счет измеряемого изменения положения вектора силы относительно ортеза или протеза.
15. Способ по п. 1, отличающийся тем, что предусмотрен датчик температуры, и сопротивление изменяют в зависимости по меньшей мере от одного измеренного сигнала температуры.
16. Способ по п. 15, отличающийся тем, что во время фазы стояния повышают сопротивление при увеличивающейся температуре.
17. Способ по п. 15, отличающийся тем, что во время маховой фазы уменьшают сопротивление сгибанию при увеличивающейся температуре.
18. Способ по любому из пп. 15-17, отличающийся тем, что сопротивление изменяют при достижении или превышении порогового значения температуры.
19. Способ по любому из пп. 15-17, отличающийся тем, что сопротивление изменяют непрерывно при изменении температуры.
20. Способ по п. 15, отличающийся тем, что вызванное температурой изменение сопротивления накладывают на функциональное изменение сопротивления, которое происходит на основании скорости ходьбы или ситуации ходьбы.
21. Способ по п. 15, отличающийся тем, что при достижении или превышении порогового значения температуры выдается предупреждающий сигнал.
22. Способ по п. 15, отличающийся тем, что измеряют температуру создающего сопротивление приспособления и используют в качестве основы для управления.
23. Способ по любому из пп. 15-17, 20-22, отличающийся тем, что предусмотрено регулировочное приспособление, с помощью которого изменяют степень изменения сопротивления.
24. Способ по п. 1, отличающийся тем, что создают универсальную характеристику из сопротивления сгибанию, рычага колена и угла колена, и управление сопротивлением выполняют на основе универсальной характеристики.
25. Способ по п. 1 или 24, отличающийся тем, что в случае неисправности приспособлений для измерения моментов и сил используют алгоритмы управления на основе остальных приспособлений для изменения сопротивления разгибанию и/или сопротивления сгибанию.
26. Способ по п. 1, отличающийся тем, что определяют расстояние вектора силы реакции грунта до одной части сустава и уменьшают сопротивление, когда превышается пороговое значение расстояния.
27. Способ по п. 26, отличающийся тем, что сопротивление уменьшают в фазе стояния, если угол колена составляет меньше 5°.
28. Способ по п. 26, отличающийся тем, что сопротивление уменьшают в фазе стояния, если определяют увеличивающийся относительно вертикали угол инерции голенной части.
29. Способ по п. 26, отличающийся тем, что уменьшают сопротивление, если движение голенной части относительно бедренной части не является сгибающим.
30. Способ по п. 26, отличающийся тем, что сопротивление уменьшают, если имеется распрямляющий момент колена.
31. Способ по любому из пп. 27-30, отличающийся тем, что сопротивление после уменьшения снова увеличивают до значения в фазе стояния, если в течение заданного времени после уменьшения сопротивления не достигается пороговое значение для угла инерции одного компонента сустава, для угловой скорости инерции, для силы реакции грунта, для момента сустава, для угла сустава или для расстояния вектора силы до одного компонента сустава.
32. Способ по любому из пп. 27-30, отличающийся тем, что сопротивление после уменьшения снова повышают до значения фазы стояния, если после уменьшения сопротивления и достижения после уменьшения порогового значения для угла инерции одного компонента сустава, угловой скорости инерции, силы реакции грунта, момента сустава, угла сустава или расстояния вектора силы до компонента сустава в течение заданного времени не достигается другое пороговое значение для угла инерции, угловой скорости инерции, для силы реакции грунта, для момента сустава, для угла сустава или для расстояния вектора силы до одного компонента сустава.
33. Способ по любому из пп. 27-30, отличающийся тем, что сопротивление остается уменьшенным, если обнаруживают увеличение угла сустава.
34. Способ по п. 1, отличающийся тем, что определяют точку приложения силы на ступне, и сопротивление повышают или не уменьшают, если точка приложения силы перемещается в направлении пятки.
35. Способ по любому из пп. 1, 28, 29 или 34, отличающийся тем, что сопротивление сгибанию в фазе стояния повышают или не уменьшают, если определяют уменьшающийся в направлении вертикали угол инерции голенной части и одновременно нагруженную плюсну.
36. Способ по п. 35, отличающийся тем, что сопротивление повышают или не уменьшают, если угловая скорость инерции одной части сустава становится ниже порогового значения.
37. Способ по п. 35, отличающийся тем, что определяют ход изменения нагрузки на плюсну, и сопротивление повышают или не уменьшают, если при уменьшающемся угле инерции голенной части уменьшается нагрузка на плюсну.
38. Способ по п. 27 или 30, отличающийся тем, что измеряют момент колена, и сопротивление повышают или не уменьшают, если определяют действующий в направлении сгибания момент колена.
39. Способ по п. 28 или 29, отличающийся тем, что угол инерции голенной части определяют либо непосредственно, либо из угла инерции другой соединительной части и угла сустава.
40. Способ по п. 39, отличающийся тем, что изменение угла инерции сустава определяют непосредственно с помощью гироскопа или по разнице между сигналом угла инерции части сустава или сигналом инерции одной соединительной части и угла сустава.
41. Способ управления ортезом или протезом сустава нижней конечности, содержащим создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния, отличающийся тем, что посредством датчиков по меньшей мере одного приспособления для измерения моментов и/или сил определяют по меньшей мере:
- один момент и одну силу, или
- два момента и одну силу, или
- две силы и один момент,
и данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию, причем в качестве вспомогательной переменной определяют расстояние вектора силы до оси соединительной части сустава в положении отсчета посредством связи данных датчиков двух моментов и одной силы по меньшей мере одного приспособления для измерения моментов и/или сил.
42. Способ по п. 41, отличающийся тем, что при достижении или превышении заданного значения для вспомогательной переменной переключают создающее сопротивление приспособление в состояние маховой фазы.
43. Способ по п. 41, отличающийся тем, что сопротивление сгибанию уменьшают при уменьшающемся значении вспомогательной переменной.
44. Способ управления ортезом или протезом сустава нижней конечности, содержащим создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния, отличающийся тем, что посредством датчиков по меньшей мере одного приспособления для измерения моментов и/или сил определяют по меньшей мере:
- один момент и одну силу, или
- два момента и одну силу, или
- две силы и один момент,
и данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию, причем в качестве вспомогательной переменной определяют момент в сечении в положении отсчета посредством взвешенного сложения значений датчиков двух моментов приспособления для измерения моментов и/или сил, в частности датчика момента лодыжки и датчика момента колена.
45. Способ по п. 44, отличающийся тем, что при достижении или превышении заданного значения для вспомогательной переменной переключают создающее сопротивление приспособление в состояние маховой фазы.
46. Способ по п. 44, отличающийся тем, что сопротивление сгибанию уменьшают при уменьшающемся значении вспомогательной переменной.
47. Способ управления ортезом или протезом сустава нижней конечности, содержащим создающее сопротивление приспособление, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния, отличающийся тем, что посредством датчиков по меньшей мере двух приспособлений для измерения моментов и/или сил определяют по меньшей мере:
- один момент и одну силу, или
- два момента и одну силу, или
- две силы и один момент,
и данные датчиков по меньшей мере двух определяемых величин связывают друг с другом с помощью математической операции и вычисляют за счет этого по меньшей мере одну вспомогательную переменную, которую используют в качестве основы для управления сопротивлением сгибанию и/или сопротивлением разгибанию, причем в качестве вспомогательной переменной определяют действующую на нижнюю соединительную часть поперечную силу по частному разницы двух моментов и расстояния между обоими приспособлениями для определения моментов и/или сил.
48. Способ по п. 47, отличающийся тем, что при достижении или превышении заданного значения для вспомогательной переменной переключают создающее сопротивление приспособление в состояние маховой фазы.
49. Способ по п. 47, отличающийся тем, что сопротивление сгибанию уменьшают при уменьшающемся значении вспомогательной переменной.
| US 2008114272 A1, 15.05.2008 | |||
| WO 9641599 A1, 27.12.1996 | |||
| US 2009030530 A1, 29.01.2009 | |||
| US 2009171468 A1, 02.07.2009 | |||
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ С РЕГУЛИРОВАНИЕМ СИЛ ПОДТОРМАЖИВАНИЯ РАЗДЕЛЬНО ПРИ СГИБАНИИ И РАЗГИБАНИИ | 2003 |
|
RU2254832C1 |
| ШАРНИРНЫЙ КОЛЕННЫЙ СУСТАВ ПРОТЕЗА НИЖНИХ КОНЕЧНОСТЕЙ | 1994 |
|
RU2076670C1 |

