Существующий уровень техники
Область техники
Настоящее изобретение относится в целом к протезным коленам, в частности к приспосабливающимся к скорости и приспосабливающимся к пациенту управляющей схеме и системе для внешних коленных протезов.
Описание аналогов
Большинство современных активных коленных протезов представляет собой тормоза с изменяющимся моментом, в которых амортизация сустава управляется микропроцессором, когда человек без ноги идет шаг за шагом. Многие технологии тормозов использованы для коленей, включая пневматические, гидравлические и магнитореологические.
Согласно наиболее современной протезной технологии, протезист регулирует сопротивления колена для подстройки искусственной ноги к безногому человеку, чтобы коленный протез двигался естественно при низких, средних и высоких скоростях ходьбы. При пользовании для выяснения скорости ходьбы используются датчики рядом с протезом. Микропроцессор затем регулирует сопротивления колена на основе индивидуальных значений или данных, заранее запрограммированных протезистом только для этого конкретного пациента.
Недостатком этой методологии программирования протезного колена является то, что она требует большого времени и для протезиста и для пациента и должна повторяться для каждого пациента. Кроме того, любые непредвиденные изменения у пациента или в окружающей пациента среде не компенсируется коленным протезом после того, как пациент ушел от аппаратуры протезиста. Этот недостаток приспособляемости в коленной системе может нарушить нормальное передвижение и может сделать запрограммированное колено неудобным и даже небезопасным. В этой ситуации пациент должен возвращаться к аппаратуре протезиста, чтобы перепрограммировать коленный протез. Это, опять-таки, нежелательно выражается в дополнительной трате времени и увеличивает стоимость.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому результату в процессе использования как в части способа, так и устройства, является протезный узел, включающий протез коленного сустава, углубление для культи, находящееся в механической связи с протезом коленного сустава, приспособленное для приема оставшейся конечности человека без ноги, голенную часть протеза, находящуюся в механической связи с протезом коленного сустава, и ступню протеза, находящуюся в механической связи с голенной частью протеза, магнит и магнитореологическую жидкость, которая под действием магнитного поля изменяет амортизирующий момент коленного сустава, при этом функционирование протезного узла осуществляется посредством электронного управления (DE 19754690 A, опубликовано 01.07.1999).
Сущность изобретения
Соответственно одним преимуществом настоящего изобретения является преодоление некоторых или всех упомянутых ограничений путем обеспечения автоматической приспосабливающейся к скорости и приспосабливающейся к пациенту схемы и системы управления коленного протеза. Схема и система управления используют информацию датчиков, измеренную около протеза, для автоматической регулировки сопротивления колена в фазах стояния и ходьбы для конкретного носителя при широком множестве двигательных действий. В качестве преимущества не требуется никакой зависящей от пациента информации, подлежащей предварительному программированию в протезном колене протезистом или пациентом. Система способна приспосабливаться к различным типам помех, когда пациент уходит от аппаратуры протезиста, поскольку она способна приспосабливаться к пациенту и способна приспосабливаться к скорости.
В соответствии с одним предпочтительным вариантом выполнения обеспечивается способ адаптивного управления амортизацией в фазе стояния протезного колена, носимого пациентом. Способ содержит шаг обеспечения памяти в протезном колене. Память сохраняет соотношения между данными датчиков и амортизацией в фазе стояния, установленной в клинических исследованиях людей без ноги с различными размерами тела. Моментальная информация датчиков измеряется с использованием датчиков рядом с протезным коленом, когда пациент стоит, идет или бежит. Моментальная информация датчиков используется вместе с соотношениями для автоматической регулировки амортизации в фазе стояния, пригодной для пациента, без необходимости в зависящей от пациента информации для предварительного программирования протезного колена.
В соответствии с другим предпочтительным вариантом выполнения обеспечивается способ адаптивного управления амортизацией в фазе ходьбы протезного колена, носимого пациентом, когда пациент передвигается с различными двигательными скоростями. Время контакта с землей протезной ступни, соединенной с протезным коленом протезной ногой, показывает двигательную скорость пациента. Способ содержит шаг непрерывного измерения времени контакта в течение периодов одного цикла походки, когда пациент перемещается с различными двигательными скоростями. Время контакта хранится в памяти протезного колена во временных окнах, соответствующих двигательной скорости пациента. Амортизация в фазе ходьбы для сгибания колена итеративно модулируется для достижения итогового пикового диапазона углов сгибания, пока сгибание не сойдется внутри каждого временного окна. Амортизация в фазе ходьбы для выпрямления колена итеративно модулируется для управления усилием воздействия выпрямляемой протезной ноги на искусственную коленную чашечку протезного колена до тех пор, пока амортизация выпрямления не сойдется внутри каждого временного окна. Сведенные значения амортизации используются для автоматического управления амортизацией в фазе ходьбы на всех двигательных скоростях.
В соответствии с одним предпочтительным вариантом выполнения обеспечивается приспосабливающееся протезное колено для управления моментом амортизации колена во время фазы стояния человека без ноги. Протезное колено в общем случае содержит управляемый коленный привод, датчики и контроллер. Коленный привод обеспечивает изменяющийся момент амортизации в ответ на командные сигналы. Датчики измеряют усилие и момент, приложенные к протезному колену, когда человек без ноги перемещается по поддерживающей поверхности. Контроллер имеет память и приспособлен отправлять командные сигналы в коленный привод и принимать входные данные от датчиков. Память хранит соотношения между данными датчиков и амортизацией в фазе стояния, установленные в предшествующих клинических исследованиях пациентов с различными размерами тела. Контроллер использует данные датчиков вместе с соотношениями для адаптивного и автоматического управления амортизирующим моментом, заданным приводом колена во время фазы стояния, независимо от какого-либо предшествующего знания размеров человека без ноги.
В целях обобщения изобретения далее описываются определенные аспекты, преимущества и новые признаки изобретения. Конечно, должно быть понятно, что не обязательно все преимущества могут быть достигнуты в соответствии с любым практическим выполнением изобретения. Таким образом, изобретение может быть воплощено или выполнено так, что достигается или оптимизируется одно преимущество или группа преимуществ, как они описаны здесь, без необходимого достижения других преимуществ, как они могут быть описаны или предложены здесь.
Все эти выполнения направлены на то, чтобы входить в объем изобретения, раскрытого здесь. Эти и другие варианты выполнения настоящего изобретения будут очевидны для специалиста из следующего далее подробного описания предпочтительных вариантов выполнения, имеющих ссылки на приложенные чертежи, и изобретение не ограничено раскрытым(и) каким(и)-либо конкретным(и) вариантом(-ами) выполнения.
Краткое описание чертежей
При наличии такого обобщения общей природы изобретения и его необходимых свойств и преимуществ некоторые предпочтительные варианты выполнения и их модификации будут понятны специалисту из нижеследующего описания со ссылками на чертежи, на которых:
Фиг.1 является схематическим чертежом одного нормального человеческого двигательного цикла, показывающего различные положения в течение фаз стояния и ходьбы;
Фиг.2 является схематическим графическим представлением изменения угла колена, показывающим переходы состояний в течение нормального цикла походки;
Фиг.3 является графиком угла биологического колена и механической мощности в зависимости от доли в процентах завершенного цикла ходьбы для одного субъекта;
Фиг.4 является схематической иллюстрацией протезного комплекта нижней конечности, содержащей управляемое электроникой протезное колено и имеющей признаки и преимущества в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения;
Фиг.5А и 5В являются упрощенным представлением в виде блок-схемы приспосабливающейся системы протезного колена, имеющей признаки и преимущества в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения;
Фиг.6 является схемой одного предпочтительного варианта выполнения контроллера в виде конечного автомата для системы протезного колена по фиг.5 и показывает условия перехода "состояние в состояние" для цикла походки или действий;
Фиг.7 является графиком времени контакта ступни от скорости вперед для здорового человека, двигающегося на нескольких стабильных постоянных скоростях;
Фиг.8 является упрощенным схематическим изображением общей конфигурации одного предпочтительного варианта выполнения привода протезного колена по настоящему изобретению;
Фиг.9 является подробным изображением в разобранном виде тормоза протезного колена, приводимого в действие магнитореологически, имеющего характеристики и преимущества в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения;
Фиг.10 является видом в поперечном сечении протезного колена по фиг.9.
Подробное описание предпочтительных вариантов выполнения
Для того чтобы дать возможность человеку с трансбедренной ампутацией (выше колена) ходить в различных обстоятельствах, протезное колено должно обеспечивать управление сгибанием для ограничения прогиба, когда к конечности прикладывается вес. Кроме того, протез должен обеспечивать управление фазой выпрямления, чтобы колено достигало полного выпрямления как раз перед ударом пяткой мягким и естественным образом.
В отличие от биологического колена, протезное колено должно выполнять одновременно управление сгибанием и выпрямлением без прямого знания о намерениях пользователя или окружающей среды. Вернее, протезное колено должно догадываться, идет ли человек без ноги, бежит или сидит. Оно также должно определять, когда в окружающей среде происходят небольшие или серьезные изменения, такие как те, когда пользователь поднимает чемодан или идет вниз по наклонной поверхности. Более того, протез должен передвигаться естественно и быть безопасным при всех двигательных скоростях и должен работать одинаково хорошо для всех людей без ноги, независимо от массы тела, роста, уровня активности, без необходимости в зависящей от пациента информации или программирования протезистом.
В соответствии с одним предпочтительным вариантом выполнения настоящего изобретения протезное колено точно и аккуратно управляется практически при всех двигательных скоростях и практически для всех пациентов. Изобретение использует схему приспосабливания, которая автоматически регулирует сопротивления и амортизацию фаз сгибания и выпрямления без информации предварительного программирования от пациента или протезиста, делая "интеллектуальное" колено одновременно приспосабливающимся к скорости и приспосабливающимся к пациенту.
Обычное перемещение по ровной земле
Понимание обычной человеческой ходьбы/бега обеспечивает основу для конструирования и развития эффективных протезов нижних конечностей с управляемым движением. Обычное человеческое перемещение или походка могут быть описаны как последовательность ритмических чередующихся движений нижних конечностей и туловища, результатом которых является продвижение вперед центра тяжести тела.
Один типичный нормальный цикл походки по ровной земле, как он показан на фиг.1, содержит действие, которое проявляется между ударом пяткой одной нижней конечности 10 и последующего удара пяткой той же конечности 10. Конечность или нога 10 в общем случае содержит стопу 12, голенную часть 14, соединенную или сочлененную с бедренной частью 16 коленом или коленным суставом 18. В течение единственного цикла походки каждая нижняя конечность проходит одну фазу 20 стояния или выпрямления и одну фазу 22 ходьбы.
Фаза 20 стояния начинается с удара 24 пяткой, когда пятка касается пола или поддерживающей поверхности земли, и стоящее колено начинает слегка сгибаться. Это сгибание позволяет самортизировать воздействие и также поддерживает центр тяжести тела в более постоянном вертикальном положении при стоянии.
Сразу после удара 24 пяткой ступня контактирует с землей в начале фазы 26 плоской ступни. После того как в стоящем колене достигнуто наибольшее сгибание, сустав начинает снова выпрямляться, пока не будет достигнуто максимальное выпрямление в средней фазе стояния 28, когда вес тела переносится прямо на поддерживающую конечность и продолжает вращать ступню.
Когда масса тела над лодыжкой продолжает вращаться вперед, пятка отрывается от земли в точке 30 отрыва пятки. Сразу после этого тело продвигается вперед мощным действием икроножных мышц (отталкивание). Фаза отталкивания заканчивается, когда вся ступня отрывается от земли в точке 32 отрыва пальцев.
В момент окончания стояния колено опорной ноги сгибается в подготовке к отрыву ступни от земли для шага. Это явление в литературе обычно называется "тормоз колена". В это время соседняя ступня ударяет по земле и тело находится в "режиме двойной опоры", то есть обе ноги поддерживают вес тела.
В точке 32 отрыва пальцев, когда бедро сгибается и колено достигает определенного угла в тормозе колена, ступня отрывается от земли и колено продолжает сгибаться в фазе ходьбы. В начале фазы ходьбы ступня ускоряется. После достижения максимального сгиба в средней фазе 34 ходьбы колено начинает выпрямляться и ступня замедляется. После того как колено достигло полного выпрямления, ступня снова опускается на землю в точке 24' удара пятки, и начинается следующий цикл передвижения.
Обычно анатомическим положением является вертикальное положение, поэтому сгибание является движением тела частично из выпрямленного, стоящего или анатомического положения. Таким образом, сгибание колена является изгибом колена. Выпрямление является движением конечности в анатомическое положение, таким образом, распрямление колена является движением в направлении "выпрямления".
Говоря другими словами, если рассматривать коленный сустав как простой шарнир, имеется два отдельных действия, которые могут появиться. При "изгибе" коленный сустав вращается, чтобы разрешить верхней и нижней частям ноги переместиться ближе друг к другу. При "распрямлении" коленный сустав вращается в обратном направлении, части ноги двигаются друг от друга и нога выпрямляется.
В процессе обычного перемещения ходьбой в основном по ровной поверхности максимальный угол αF сгибания меняется от 60° до 80°. Максимальный угол αE распрямления обычно равен 180° или близок к нему. Таким образом, при ходьбе по равнине обычное колено человека вращается в диапазоне примерно 60°-80° от положения полного распрямления в ранней и средней фазе стояния до 60°-80° сгибания сразу после отрыва пальцев. В других ситуациях, например в сидячем положении, максимальный угол αF сгибания может быть 140°-150°.
На фиг.2 предпочтительно цикл походки по фиг.1 характеризуется пятью отдельными состояниями или фазами. Фиг.2 схематично показывает угол θ колена, то есть угол, на который колено вращается от положения полного распрямления, с переходами состояний или фаз в течение действий, которые происходят между ударом пятки (УП) одной нижней конечности и последующим ударом пятки (УП) той же самой конечности. Ось 36 X представляет время между последующими ударами пяткой в цикле ходьбы. Ось 38 Y представляет угол θ колена.
Состояние 1 представляет начало фазы сгибания при стоянии сразу после удара пяткой (УП). Состояние 2 представляет собой начало или середину фазы распрямления при стоянии после того, как в Состоянии 1 был достигнут наибольший изгиб при стоянии. Состояние 3 или пауза колена обычно происходит в конце стояния, начинаясь сразу после того, как колено полностью вытянулось, и заканчивается, когда ступня отрывается от земли в точке отрыва пальцев (ТОП). Состояние 4 представляет собой период сгибания колена во время фазы ходьбы цикла ходьбы или бега. Состояние 5 представляет период распрямления колена во время фазы ходьбы цикла ходьбы или бега, после того, как в Состоянии 4 был достигнут наибольший изгиб при ходьбе.
Как будет подробно обсуждено ниже, эти основные состояния или фазы задают структуру контроллера протезного колена как конечный автомат. Таким образом, фиг.2 является графическим представлением человека, перемещающегося через цикл нормальной походки, и положения каждого состояния внутри этого цикла. Таблица 1 обобщает действия в течение каждого из Состояний 1-5.
Фиг.3 является графиком обычного угла биологического колена и мощности колена от времени, нормированного для периода шага (взято из книги Grimes, 1979). Ось 40 X представляет собой время, нормированное для периода Т шага, или процент цикла ходьбы. Ось 42 Y представляет собой мощность колена (Р в фут-фунт/с), а ось 44 Y представляет собой угол колена (θ в градусах).
На фиг.3 четыре испытания по ходьбе показаны для одного субъекта. 0 процентов и 100 процентов показывают два последовательных удара пяткой одной и той же ноги, а нулевой угол в общем случае соответствует углу удара пяткой. Также на фиг.3, RHS представляет удар правой пяткой, RFF представляет правую плоскую ступню, LTO представляет отрыв пальцев левой ноги, RHO представляет отрыв правой пятки. LHS представляет удар левой пяткой, LFF представляет левую плоскую ступню, RTO представляет отрыв пальцев правой ноги, LHO представляет отрыв левой пятки.
Кроме того, на фиг.3 небольшой наклон 46 в графике угла (15% от полного цикла) представляет сгибание и распрямление колена во время начала или середины фазы стояния, тогда как более сильный наклон 48 (75% от полного цикла) представляет сгибание и распрямление колена во время фазы выпрямления. За весь цикл механическая мощность колена в основном отрицательная или рассеивающаяся. Это оправдывает использование изменяющегося амортизатора или тормоза с изменяющимся моментом в коленном протезе. Такой изменяющийся амортизатор или коленный привод подробно обсуждается ниже.
Конфигурация системы
Фиг.4 является схематической иллюстрацией протезного комплекта или протеза 100 для нижней конечности, содержащего управляемый электроникой коленный протез 110 и имеющего признаки и преимущества в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения. Как описано ниже более подробно, предпочтительно, чтобы активный коленный протез содержал тормозную систему или амортизатор 130 с изменяющимся моментом и встроенный блок или систему 120 управления, заключенные в поддерживающий корпус 141. Протезная коленная система 110 обеспечивает усилия сопротивления, чтобы практически моделировать положения и движения естественного коленного сустава при хождении и/или другой передвижной деятельности, выполняемой человеком без ноги.
Одним концом искусственная коленная система 110 связана или механически соединена с углублением 102 для оставшейся конечности, которое принимает оставшуюся конечность или бедренную часть 104 человека без ноги. Другой конец протезной коленной системы 110 связан или механически соединен с опорной или голенной частью 106, которая, в свою очередь, связана или механически соединена с протезной или искусственной ступней 108.
В качестве преимущества протезная коленная система 110 по предпочтительным вариантам выполнения является одновременно приспосабливающейся к скорости и приспосабливающейся к пациенту. Таким образом, вращение коленного сустава автоматически управляется практически на всех скоростях и практически для всех пациентов независимо от размеров тела, без предварительно запрограммированной информации или откалиброванных данных от пациента или протезиста.
Одним главным преимуществом предпочтительных вариантов выполнения коленной системы является то, что она способна приспосабливаться к различным типам помех, когда пациент уходит от аппаратуры протезиста, поскольку она способна приспосабливаться к пациенту и способна приспосабливаться к скорости. В качестве примера, когда пациент поднимает чемодан, колено реагирует на помеху автоматически. При обычной технологии пациент должен вернуться к аппаратуре протезиста и перепрограммировать свое колено. В предпочтительных вариантах период испытаний обычно не является "продолжительным" и "утомительным".
Протезное колено 110 по предпочтительным вариантам выполнения позволяет человеку без ноги передвигаться и/или комфортно и безопасно адаптироваться к большому множеству обстоятельств. Например, при хождении, беге, сидении, либо при обнаружении небольших или серьезных изменений в окружающей среде или внешних условиях, таких как те, когда пользователь поднимает чемодан или идет вниз по наклонной поверхности.
Искусственное колено 110 обеспечивает контроль за стоянием для ограничения прогиба, когда к конечности прикладывается вес. Кроме того, протезное колено 110 обеспечивает воздушный контроль за ходьбой, так что колено достигает полного выпрямления прямо перед или в момент удара пяткой плавным и естественным образом.
Предпочтительно искусственная коленная система 110 по настоящему изобретению используется для пациентов с трансбедренной ампутацией (выше колена, В/К). Альтернативно или опционально протезное колено 110 может быть приспособлено для использования пациентами с экзартикуляцией колена (Э/К), когда ампутация проходит через коленный сустав, как необходимо или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Электроника колена
Фиг.5 показывает предпочтительный вариант выполнения протезной коленной системы 110 по изобретению в виде блок-схемы. На фиг.5 непрерывные линии связи представляют поток сигналов/данных, а пунктирные линии связи показывают поток мощности.
Как упомянуто выше, предпочтительно искусственная коленная система 110 в общем случае содержит тормозную систему или амортизатор 130 с изменяющимся моментом и встроенный блок или систему 120 управления. Система 120 управления с обратной связью содержит центральный контроллер 132, который принимает информацию датчиков и диагностическую информацию для управления работой коленного привода 130 и другого связанного с ними оборудования (как обсуждается ниже). В целях ясности различные составляющие протезной коленной системы 110 в соответствии с одним предпочтительным вариантом выполнения перечислены ниже в Таблице 2.
Как упомянуто выше, коленный привод 130 содержит тормозную систему или амортизатор с изменяющимся моментом для изменения амортизации сустава, чтобы управлять движениями выпрямления и сгибания, основываясь на командных сигналах от контроллера 132 колена. Способ, которым схема управления по предпочтительным вариантам выполнения управляет вращением коленного сустава, будет подробнее обсужден ниже.
Коленный привод или тормоз 130 может содержать любой из нескольких обычных тормозов. Они включают в себя без ограничений (1) сухие фрикционные тормоза, в которых поверхность одного материала трется о другую поверхность с изменяемой силой; (2) тормоза с вязким моментом, использующие жидкость, выдавливаемую через сопло изменяемого размера или пластину ограничения потока; (3) магнитореологические (МР) тормоза или амортизаторы, в которых МР жидкость (содержащая мелкие железные частицы, находящиеся в воде в состоянии взвеси) выдавливается через фиксированное сопло или пластину ограничения потока, причем вязкость жидкости меняется в ответ на приложенное магнитное поле. Опционально коленный тормоз 130 может содержать пневматический тормоз, как известно из уровня техники.
В одном предпочтительном варианте выполнения и как более подробно обсуждается ниже, коленный тормоз 130 содержит магнитореологический (МР) тормоз с изменяемым крутящим моментом, который работает в сдвиговом режиме. МР жидкость сдвигается между множеством роторов и статоров для выработки изменяемого и управляемого амортизирующего воздействия, которое точно модулирует (изменяет) вращение коленного сустава.
В одном предпочтительном варианте выполнения протезная коленная система 110 включает в себя искусственную коленную чашечку или стопор распрямления, чтобы ограничить максимальное распрямление колена. Искусственная или протезная коленная чашечка предпочтительно находится ниже коленного привода 130 и механически соединена с коленным приводом 130 и/или корпусом 141.
Усилитель 160 тока коленного привода содержит схему, которая вырабатывает необходимый или желательный ток от аккумулятора 170 в коленный привод 130, чтобы модулировать амортизирующий момент, обеспеченный коленным тормозом 130. Командные сигналы или инструкции от микропроцессора 132 в усилитель 160 тока коленного привода определяют ток, подаваемый на коленный привод 130, и, следовательно, величину вырабатываемого амортизирующего момента.
Встроенный микропроцессор 132, включающий в себя память 150, находится прямо в протезной коленной системе 110. Микропроцессор 132 является основным вычислительным блоком протезной коленной системы 110 и принимает входные электрические сигналы от различных составляющих коленной системы 110, обрабатывает их и вырабатывает выходные электрические сигналы для наблюдения и управления действиями протезного колена 130 и других связанных с ним составляющих, если это необходимо.
Микропроцессор 132 включает в себя схему, которая оцифровывает входящие сигналы и вырабатывает исходящие аналоговые сигналы. Микропроцессор далее включает в себя модули синхронизации и схему контроля за самостоятельным перезапуском. Память 150 содержит внутреннюю или внешнюю энергозависимую и энергонезависимую память.
Микропроцессор предпочтительно содержит 16-разрядный микропроцессор Motorola 68HC12B32. Этот процессор имеет 8-канальную способность аналого-цифрового преобразования, 32 Кбайт флэш-памяти и 768 байт памяти ЭСППЗУ. Внешняя память содержит два стандартных для промышленности модуля памяти ОЗУ 32 Кбайт по 8 разрядов. Серийной флэш-памятью является Atmel AT45D081, она использует интерфейс последовательной связи (ИПС), обеспеченный микропроцессором.
Порт 152 последовательной связи обеспечивает интерфейс между электроникой колена через микропроцессор 132 и внешним диагностическим, регистрирующим данные и программирующим оборудованием. Порт 152 может эффективно содержать любой из числа коммерчески доступных последовательных портов, например RS232, RS485, Ethernet и т.п., как требуется или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Микропроцессор 132 вместе с другими связанными схемами датчиков, безопасности диагностики и защиты диагностики протезной коленной системы 110 предпочтительно установлены на печатной плате для обеспечения компактной сборки. Печатная плата предпочтительно находится в корпусе 141 и прикреплена к нему напрямую, либо, используя промежуточный кожух или покрытие для защиты печатной платы и составляющих, установлена на ней.
Датчик 134 коленного угла используется для кодирования абсолютного коленного угла. Предпочтительно датчик 134 коленного угла измеряет угол, на который коленный сустав с одной степенью свободы сгибается и выпрямляется. Усилитель 136 коленного угла содержит схему, которая подготавливает сигнал, принятый от датчика 134 коленного угла, и подает его на микропроцессор 132 в целях управления коленом, как обсуждается ниже.
Дифференциатор 138 коленного угла содержит схему, которая дифференцирует сигнал, принятый от датчика 134 коленного угла, для определения скорости вращения или угловой скорости колена, и подает этот сигнал на микропроцессор 132 в целях управления коленом, как обсуждается ниже. Сигнал угловой скорости колена определяет, является ли колено сгибающимся или выпрямляющимся.
Датчик 134 угла предпочтительно установлен на корпусе 141 (фиг.4). Альтернативно, датчик 134 угла может быть установлен на боковой стороне коленного привода 130 или прямо на коленный привод 130, если необходимо или желательно.
В одном предпочтительном варианте выполнения датчик 134 угла содержит воспринимающий угол потенциометр. В другом предпочтительном варианте выполнения датчик 134 угла содержит оптический кодировщик вала. Еще в одном предпочтительном варианте выполнения датчик 134 угла содержит магнитный кодировщик вала. В других предпочтительных вариантах выполнения могут эффективно использоваться альтернативные детекторы коленного угла, как требуется или желательно, уделяя должное внимание целям точной оценки коленного угла, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Датчики 140 осевого усилия и момента содержат преобразователь, который вырабатывает сигнал, пропорциональный осевому усилию и моменту нижней конечности. В одном предпочтительном варианте выполнения преобразователь содержит передний датчик измерения натяжения и задний датчик измерения натяжения. Для вычисления осевого усилия передний и задний сигналы складываются, а для вычисления момента эти сигналы вычитаются. Усилители 142 осевого усилия и момента согласуют сигналы, принятые от датчиков 140 осевого усилия и момента, и подают их на микропроцессор 132 для целей управления коленом, как будет обсуждено ниже.
Датчики 140 осевого усилия измеряют составляющую усилия, приложенную к коленному протезу 110 от земли или другой поддерживающей поверхности, в направлении практически вдоль или параллельно продольной оси 180 голени (фиг.4) или длинной оси колена. Измерение осевого усилия используется для определения того, находится ли протезная ступня 108 (фиг.4) на земле или оторвалась от земли или другой поддерживающей поверхности. То есть нулевое осевое усилие показывает, что ступни 108 нет на земле, например, в фазе ходьбы, тогда как ненулевое осевое усилие показывает, что ступня 108 находится на земле, например, в фазе стояния.
Датчики 140 момента измеряют составляющие момента, приложенные к коленному протезу 110 в медиальном-продольном направлении 182, как показано на фиг.4. Кроме того, датчики 140 момента определяют, является ли приложенный момент колена моментом сгибания или распрямления. Обычно при ударе пяткой момент сгибания поступает в коленный протез 110, стремясь согнуть коленный сустав, а в конце фазы стояния прикладывается момент выпрямления, стремящийся распрямлять сустав.
Датчики 140 осевого усилия и момента предпочтительно установлены на корпусе 141 (фиг.4). В одном предпочтительном варианте выполнения датчики 140 осевого усилия и момента содержат тензодатчик. В другом предпочтительном варианте выполнения датчики 140 осевого усилия и момента содержат ударный/пружинный механизм кодированного отражения. В других предпочтительных вариантах выполнения могут быть эффективно использованы альтернативные датчики нагрузки и/или момента, как требуется или желательно, уделяя должное внимание целям точной оценки осевой нагрузки и/или приложенного момента, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
В одном предпочтительном варианте выполнения датчики 140 осевого усилия и момента содержат множество тензометров. Предпочтительно используются четыре тензометра, где два тензометра установлены на передней стороне 184 корпуса 141 и два тензометра установлены на задней стороне 186 корпуса 141 для измерения и различения между нагрузкой на пятке ступни 108 и нагрузкой на пальцах ступни 108. Иными словами, измерение натяжения обеспечивает индикацию того, где находится центр тяжести относительно протезной ступни 108 - в переднем положении, по центру или в заднем положении.
Тензометры предпочтительно расположены в конфигурации моста для измерения сопротивления, чтобы вырабатывать электрический сигнал, который меняется пропорционально натяжению изгибающего момента. Специалист поймет, что такая конфигурация в виде моста для измерения сопротивления является стандартной установкой для определения изменения сопротивления в тензометрах.
Схема 144 наблюдения за аккумулятором непрерывно или периодически наблюдает за напряжением, током и температурой аккумулятора в целях безопасности. Данные из схемы 144 наблюдения за аккумулятором непрерывно или периодически подаются на микропроцессор 132, чтобы помочь сдерживать работу колена согласно спецификациям производителя аккумулятора.
Схема 146 обнаружения влажности непрерывно или периодически наблюдает за уровнями влажности в целях безопасности и обнаруживает любую ненормальную влажность на системной печатной плате и/или других связанных системных схемах из-за конденсации, погружения в воду и проч. Данные от схемы 146 обнаружения влажности непрерывно или периодически подаются на микропроцессор 132.
В одном предпочтительном варианте выполнения схема 146 обнаружения влажности содержит гребенчатые медные полосы. В других предпочтительных вариантах выполнения схема обнаружения влажности может эффективно содержать альтернативные устройства обнаружения влажности, как требуется или желательно, уделяя должное внимание целям надежного обнаружения уровней влажности в системной электронике, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Схема 148 наблюдения за использованием энергии непрерывно или периодически измеряет потребление энергии коленным приводом 130 в целях безопасности. Данные из схемы 148 наблюдения за использованием энергии непрерывно или периодически подаются на микропроцессор. Кроме того, схема 148 наблюдения за использованием энергии или другие независимые схемы могут применяться, если требуется или желательно, для измерения потребления энергии другими электронными составляющими протезной коленной системы 110.
Протезная коленная система 110 предпочтительно содержит систему безопасности, включающую в себя механизм 154 безопасности. Механизм 154 безопасности приводится в действие или активируется, чтобы перевести систему 110 по умолчанию в безопасный режим, когда микропроцессором 132 обнаруживается системная ошибка. Такая системная ошибка может появиться, если отмечено ненормальное поведение в любом из сигналов от датчиков 134 коленного угла, датчиков 140 осевого усилия и момента, схемы 144 наблюдения за аккумулятором, схемы 146 обнаружения влажности и схемы 148 наблюдения за использованием энергии, показывающих сбой в системе и/или другую проблему с целостностью коленного привода 130.
Обнаружение системной ошибки заставляет механизм или привод 154 безопасности активировать безопасный по умолчанию режим, так что даже со сбоем в системе протезная коленная система 110 остается безопасной для человека без ноги. Например, в безопасном по умолчанию режиме колено может остаться согнутым и не может распрямиться, тем самым гарантируя безопасность пациента.
Привод 156 механизма безопасности содержит усилитель энергии, который включает и выключает безопасный по умолчанию режим механизма 154 безопасности на основе командных сигналов или инструкций от микропроцессора 132. Схема 158 контроля безопасности содержит схему, которая периодически или непрерывно "занимается" сигналами от микропроцессора 132, чтобы предохранить схему 158 контроля безопасности от ненужного запуска безопасного по умолчанию путем отправки сигналов в привод 156 механизма безопасности. Другими словами, схема 158 контроля безопасности будет активировать механизм 154 безопасности, если только она не инструктируется так иным образом микропроцессором периодически или непрерывно.
Предпочтительно и где возможно, для предупреждения пользователя о сбое в системе или необычном рабочем условии, до активации по умолчанию безопасного режима, активируется либо один из звуковых датчиков 162 предупреждения и вибродатчиков 166, либо оба этих датчика. Схема 164 звукового предупреждения содержит усилитель, который вырабатывает электронный сигнал для создания звукового шума звуковым датчиком 162 предупреждения после активации. Схема 164 звукового предупреждения принимает командные сигналы или инструкции от микропроцессора 132.
Звуковой датчик 162 предупреждения предпочтительно находится в корпусе 141, либо прикреплен к нему (фиг.4). В одном предпочтительном варианте выполнения звуковой датчик 162 предупреждения содержит пьезоэлектрический громкоговоритель. В других предпочтительных вариантах выполнения могут эффективно использоваться другие устройства по выработке звука, как требуется или желательно, уделяя должное внимание целям предупреждения пользователя, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Вибродатчик 166 содержит возбудитель, который заставляет вибрировать протезную коленную систему 110 так, чтобы привлечь внимание пользователя. Вибрационный генератор 168 предупреждения содержит усилитель, который вырабатывает электрический сигнал для включения вибродатчика 164 при запуске. Вибрационный генератор 168 предупреждения принимает командные сигналы или инструкции от микропроцессора 132.
Вибродатчик 166 предпочтительно установлен на системной печатной плате. Альтернативно, вибродатчик 166 находится в корпусе 141 либо прикреплен к нему (фиг.4). В одном предпочтительном варианте выполнения вибродатчик 166 содержит качающий мотор. В других предпочтительных вариантах выполнения могут быть эффективно использованы альтернативные устройства генерирования вибрации, как требуется или желательно, уделяя должное внимание целям предупреждения пользователя, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Встроенный аккумулятор или источник 170 энергии подает энергию на коленный привод 130, механизм 154 безопасности, звуковой датчик 162 предупреждения и вибродатчик 166. Схемы 178 согласования питания преобразуют неподготовленную энергию от аккумулятора в энергию, подготовленную для использования микропроцессором 132 и другими схемами датчиков и отдельными подчиненными участками системы. Источники 176 схемного питания подают подготовленную энергию на микропроцессор 132 и другие схемы датчиков и отдельные подчиненные участки системы.
Таким образом, через источники 176 схемного питания и схемы 178 согласования питания аккумулятор 170 распределяет энергию на микропроцессор 132 и другие схемы датчиков и отдельные подчиненные участки системы, в том числе усилитель 136 коленного угла, дифференциатор 138 коленного угла, усилители 142 осевых усилия и момента, схему 144 наблюдения за аккумулятором, схему 146 обнаружения влажности, схему 148 наблюдения за использованием энергии, схему 158 контроля безопасности, привод 156 механизма безопасности, усилитель 160 тока коленного привода, звуковую схему 164 предупреждения, вибрационный генератор 168 предупреждения и любые другие связанные схемы, если необходимо.
Схема 172 защиты аккумулятора защищает аккумулятор 170 от превышения безопасных рабочих условий. Если желательно, может быть также предусмотрен индикатор состояния заряда аккумулятора. Схема 174 зарядки аккумулятора преобразует энергию от заряжающего источника, обычно стенной розетки, до уровней энергии, пригодных для аккумулятора 170.
Схема управления
Конечный автомат
Основные фазы или состояния биологической походки (как обсуждалось выше) задают структуру контроллера протезного колена как конечного автомата. Таким образом, каждая фаза соответствует Состояниям 1-5 (см, например, фиг.2 и Таблицу 1). Фиг.6 является схемой одного предпочтительного варианта выполнения контроллера 190 в виде конечного автомата протезной коленной системы 110 и показывает переходные условия "состояние-состояние".
Как обсуждалось выше, встроенный датчик 134 коленного угла измеряет угол колена, а встроенные датчики 140 осевого усилия и движения измеряют осевое усилие и момент колена. Данные коленного угла, данные скорости вращения колена, данные осевого усилия и данные момента колена подаются на микропроцессор или основной контроллер 132 для определения состояния системы и соответственного автоматического управления приведениями в действие тормоза колена или привода 130 для модуляции вращения коленного сустава.
Кроме того, как обсуждалось выше, сигнал коленного угла определяет степень вращения коленного сустава, а сигнал угловой скорости колена определяет, сгибается ли колено или выпрямляется. Измерение осевого усилия определяет, находится ли протезная ступня на земле либо на другой поддерживающей поверхности. Измерение момента колена определяет, является ли приложенный момент колена моментом сгибания или выпрямления.
Основываясь на этих данных датчиков, поданных в микропроцессор 132, контроллер 190 в виде конечного автомата проходит циклы через различные Состояния 1, 2, 3, 4 и 5, когда пользователь проходит через каждый цикл походки или другой двигательной активности. Зачастую, как видно на фиг.6, контроллер 190 изменяет состояние в зависимости от того, перешел ли этот момент порог или критическое значение момента выпрямления. Преимущественно и как обсуждается ниже, эти пороговые моменты автоматически заучиваются системой протезного колена по предпочтительным вариантам выполнения для каждого конкретного пациента без заранее запрограммированной информации о конкретном пациенте.
Предпочтительно, управление конечным автоматом 190 по поведению амортизатора 130 колена позволяет пациенту выполнять широкое разнообразие действий. Они включают в себя обычную ходьбу или бег по ровной или наклонной поверхности, приседания, шаги вверх и вниз и другие ситуации, например, когда пользователь поднимает чемодан. Опять-таки, в этих и других ситуациях протезная коленная система по предпочтительным вариантам выполнения автоматически обеспечивает точное управление амортизацией колена без заранее запрограммированной информации о конкретном пациенте.
Общая работа контроллера 190 в виде конечного автомата и различные условия, удовлетворяемые между переходами "состояние-состояние", теперь описываются в соответствии с одним предпочтительным вариантом выполнения. Основываясь на входных данных датчиков (как описано выше), обеспечивается информация для коленного тормоза 130 о том, как модулировать амортизацию колена. Управляющие действия для каждого состояния будут описаны далее.
Во-первых, переходы состояний и условия для этих переходов описываются для обычного цикла ходьбы или бега. Как упомянуто выше, осевое усилие является составляющей усилия, прикладываемого к коленному протезу 110 от земли или другой поддерживающей поверхности в направлении по существу вдоль или параллельно продольной оси 180 голени (фиг.4) или основной оси колена. Приложенный момент является составляющей момента, прикладываемого к протезу 110 колена в медиальном-продольном направлении 182, как показано на фиг.4.
Состояние 1 (сгибание при стоянии) переходит в Состояние 2 (выпрямление при стоянии) при условии С12. Условие С12 выполняется, когда колено впервые достигает небольшой скорости выпрямления. В этой фазе протезная ступня находится на земле или другой поддерживающей поверхности.
Состояние 2 (выпрямление при стоянии) переходит в Состояние 3 (пауза колена) при условиях С23. Условия С23 выполняются, когда момент выпрямления ниже порогового или критического уровня или значения, когда колено полностью или почти полностью выпрямлено и когда колено некоторое время остается неподвижным.
Состояние 3 (пауза колена) переходит в Состояние 4 (сгибание при ходьбе) при условии С34. Условия С34 выполняются, когда осевое усилие падает ниже порогового или критического уровня или значения. То есть в этой фазе протезная ступня оторвана или почти оторвана от земли или другой поддерживающей поверхности.
Состояние 4 (сгибание при ходьбе) переходит в Состояние 5 (выпрямление при ходьбе) при условии С45. Условие С45 выполняется, когда колено впервые начинает выпрямляться. В этой фазе протезная ступня все еще оторвана от земли или другой поддерживающей поверхности.
Состояние 5 (выпрямление при ходьбе) переходит обратно в Состояние 1 (сгибание при стоянии) при условии С51. Условие С51 выполняется, когда осевое усилие поднимается выше порогового или критического уровня или значения. Это заканчивает один цикл походки ходьбы или бега
Как отмечено выше, переходы "состояние-состояние" могут следовать по другим шаблонам, отличным от схемы Состояние 1 - Состояние 2 - Состояние 3 - Состояние 4 - Состояние 5, в зависимости от конкретной активности человека без ноги и/или условий окружающей среды или рельефа. Преимущественно, контроллер 190 в виде конечного автомата адаптируется или приспосабливается к ситуациям, в которых могут возникать чередующиеся переходы, чтобы обеспечить человека без ноги возможностями достижения широкого разнообразия практически жизненных или естественных движений в различающихся внешних условиях.
Состояние 1 (сгибание при стоянии) переходит в Состояние 3 (пауза колена) при условиях С13. Условия С13 выполняются, когда момент выпрямления ниже порогового или критического уровня или значения, когда колено полностью или практически полностью выпрямлено и когда колено некоторое время остается неподвижным. Этот переход состояний из Состояния 1 в Состояние 3 может появиться, когда человек без ноги не может пройти весь цикл нормального сгибания-выпрямления при стоянии.
Состояние 1 (сгибание при стоянии) переходит в Состояние 4 (сгибание при ходьбе) при условии С14. Условие С14 выполняется, когда осевое усилие падает ниже небольшого, но не равного нулю, порогового или критического уровня или значения. Этот переход из Состояния 1 в Состояние 4 может появиться, когда человек без ноги стоит на колене, но поочередно двигается вперед и назад, загружая и разгружая протез.
Состояние 2 (выпрямление при стоянии) переходит в Состояние 1 (сгибание при стоянии) при условии С21. Условие С21 выполняется, когда колено достигает небольшой, но не равной нулю, скорости сгибания. Этот переход из Состояния 2 в Состояние 1 может появиться, если человек без ноги начинает сгибать колено в период выпрямления при стоянии.
Состояние 2 (выпрямление при стоянии) переходит в Состояние 4 (сгибание при ходьбе) при условии С24. Условие С24 выполняется, когда осевое усилие падает ниже порогового или критического уровня или значения. Этот переход из Состояния 2 в Состояние 4 может появиться, когда человек без ноги поднимает ступню в период выпрямления при стоянии.
Состояние 3 (пауза колена) переходит в Состояние 1 (сгибание при ходьбе) при условии С31. Условия С31 выполняются, когда колено находится в Состоянии 3 определенное время или если момент выпрямления больше порогового или критического значения, и когда колено полностью выпрямлено или практически полностью выпрямлено. Этот переход из Состояния 3 в Состояние 1 может появиться, если человек без ноги наклоняется на пятках из стоящего положения.
Состояние 4 (сгибание при ходьбе) переходит в Состояние 1 (сгибание при стоянии) при условии С41. Условие С41 выполняется, когда осевое усилие поднимается выше небольшого, но не равного нулю, порогового или критического значения. Этот переход из Состояния 4 в Состояние 1 может появиться, когда человек без ноги стоит на колене, но поочередно двигается вперед и назад, загружая и разгружая свой протез.
Как обсуждалось выше, контроллер 190 на основании входных данных датчиков проходит по циклу через состояния, когда пользователь проходит через каждый цикл походки или действий. Программное обеспечение механизма состояний находится внутри микропроцессора 132 или памяти 150. Далее описываются различные управляющие действия или схема для каждого состояния. Схемы управления для Состояний 1, 2 и 3 называются "управление фазой стояния", а схемы управления для Состояний 4 и 5 называются "управление фазой ходьбы".
Управление фазой стояния
В соответствии с одним предпочтительным вариантом выполнения обеспечивается схема адаптивного управления амортизацией в фазе стояния протезного колена, носимого пациентом. В памяти протезного колена хранятся соотношения, относящиеся к данным датчиков и амортизации в фазе стояния. Эти соотношения, установленные в клинических исследованиях людей без ног с различными размерами тела, характеризуют поведение колена, когда протезная ступня находится в контакте с землей. Информация датчиков используется совместно с этими соотношениями, чтобы определить, как амортизация в фазе стояния должна модулироваться для стояния, ходьбы и бега.
В соответствии с одним предпочтительным вариантом выполнения обеспечивается адаптивное протезное колено для управления моментом амортизации колена в фазе стояния человека без ноги. Протезное колено обычно содержит управляемый коленный тормоз, датчики и контроллер. Коленный тормоз обеспечивает изменяющийся амортизирующий момент в ответ на командные сигналы. Датчики измеряют угол колена, осевое усилие и приложенный момент, когда человек без ноги передвигается по поддерживающей поверхности. Контроллер имеет память и приспособлен отправлять командные сигналы коленному тормозу и принимать сигналы от датчиков. Память хранит соотношения между данными датчиков и амортизацией в фазе стояния, установленные в предшествующих клинических исследованиях пациентов с различными размерами тела. Кроме того, в памяти хранится биомеханическая информация, чтобы направлять модуляцию профилей амортизации. Контроллер использует данные датчиков от датчиков совместно с клинической и биомеханической информацией для адаптивного и автоматического управления амортизирующим моментом, обеспеченным коленным тормозом в фазе стояния независимо от какого-либо предшествующего знания габаритов пациента.
Состояние 1 (Сгибание при стоянии) и Состояние 2 (Выпрямление при стоянии):
При нормальной походке колено сначала сгибается, а затем выпрямляется полностью незадолго до середины фазы стояния (см. фиг.2 и 3). В Состоянии 1 или сгибании при стоянии протезное колено должно предпочтительно прилагать оказывающий сопротивление момент или амортизацию, чтобы препятствовать перекашиванию колена под весом пользователя. Протезное колено также должно предпочтительно прикладывать оказывающий сопротивление момент или амортизацию во время периода выпрямления в фазе стояния или Состояния 2, чтобы замедлить или самортизировать выпрямление колена, так что колено не может излишне выпрямиться, тем самым предотвращая вращение части колена, такого как коленный тормоз, от удара о протезную коленную чашечку (стопор выпрямления) или внешний корпус колена.
Степень, с которой протезное колено будет амортизировать сгибание и выпрямление так, чтобы очень близко симулировать жизненную или естественную реакцию, сильно зависит от веса тела. Таким образом, в Состоянии 1 и 2 для более тяжелых пользователей предпочтительны более высокие амортизирующие значения, чтобы в большей степени симулировать жизненные или естественные ощущения (отметим, что в общем случае высокому пользователю требуется большее сопротивление колена, но высокие люди обычно имеют склонность вращать колено быстрее, тем самым увеличивая реакцию момента системы - ток пропорционален скорости вращения колена, где постоянная пропорциональности равна амортизации колена).
В соответствии с одним предпочтительным вариантом выполнения, клинические исследования проводились с людьми без ноги с различными размерами тела, от маленьких/легких до больших/тяжелых, чтобы в общем случае охватить весь диапазон размеров тела. Эти пользователи использовали протезные колена и другое сенсорное оборудование. Предпочтительно пользователи использовали тормоз 130 протезного колена вместе с осевым и моментным датчиком 140 и датчиком 134 коленного угла.
В этих клинических исследованиях значения амортизации сгибания и выпрямления, обеспечиваемые коленным приводом 130, оптимизировались для людей без ноги с различными размерами тела, с наблюдением за данными осевого усилия, момента колена, коленного угла и угловой скорости колена, среди прочих связанных с этим данных, если это необходимо. Эти данные затем использовались для установления отношений или соотношений между сопротивлениями в фазе стояния и информацией датчиков, измеренной и/или вычисленной во время стояния.
Предпочтительно данные клинических исследований собираются по широкому диапазону действий пациентов и/или внешних условий и рельефа. Это включает в себя, среди прочего, обычную ходьбу или бег по ровной или наклонной поверхности, приседания, шаги вверх и вниз или другие ситуации, например, когда пользователь поднимает чемодан.
Оптимизированные отношения или соотношения сопротивления или амортизации колена в фазе стояния и данных от датчиков для пациентов с различными размерами тела хранятся или программируются в контроллере или микропроцессоре 132 или в памяти 150 системы. Это используется в протезной коленной системе 110 по предпочтительным вариантам выполнения для автоматического управления действиями коленного тормоза 130.
Когда человек без ноги сначала идет, используя протезную коленную систему 110, управляемую предпочтительными схемами управления по изобретению, предпочтительно микропроцессор или контроллер 132 изначально устанавливает амортизацию или сопротивление вращению колена в Состоянии 1 на большое значение. Для линейного амортизатора, в котором момент пропорционален скорости вращения колена, адекватная постоянная пропорциональности или значение амортизации равно 20 Нм·с/рад. Это гарантирует, что протезное колено 110 безопасно и не согнется до чрезмерно больших углов сгибания. Предпочтительно этот максимальный угол сгибания не превышает 15°.
В отличие от начальной амортизации Состояния 1 предпочтительно чтобы микропроцессор или контроллер 132 изначально установил амортизацию или сопротивление вращению колена на меньшее значение. Для линейного амортизатора, в котором момент пропорционален скорости вращения колена, адекватная постоянная пропорциональности или значение амортизации равно 10 Нм·с/рад. Это позволяет человеку без ноги выпрямлять колено, даже если колено оказывается уже согнутым.
Когда человек без ноги начинает передвигаться и делает несколько шагов, датчики 140 осевого усилия и момента и датчик 134 коленного угла непрерывно или периодически подают данные или сигналы осевого усилия, приложенного момента, коленного угла и угловой скорости колена на микропроцессор или контроллер 132. Эти данные датчиков и, в частности, пиковое усилие и пиковый момент и/или профили осевого усилия и момента, приложенные к протезной коленной системе 110, используются контроллером 132 для регулировки амортизации сгибания и выпрямления до значений или профилей, которые в течение предшествующих клинических исследований были определены как дающие приемлемое, или оптимизированное, или в основном жизненное поведение при стоянии.
Как обсуждалось выше, отношения или соотношения, полученные во время этих клинических исследований широкого круга пациентов, имеющих различные размеры тела, программируются или хранятся в контроллере 132. Когда пациент продолжает использовать протезную коленную систему 110, дальнейшие автоматические уточнение и тонкая настройка могут выполняться системой 110, если необходимо.
Протез предпочтительных вариантов выполнения является самообучающейся системой, которая направляется клиническим (протезным) и биомеханическим знанием. Например, биомеханическое знание (хранящееся в памяти системы) включает в себя информацию, относящуюся к механике обычной человеческой ходьбы/бега, как обсуждалось выше со ссылкой на фиг.1.
Кроме того, клинические отношения или соотношения также позволяют протезной коленной системе 110 определить должные "пороговые моменты" для конкретного человека без ноги независимо от размера тела. Как обсуждалось выше, эти пороговые моменты используются конечным автоматом 190 (фиг.6) для изменения состояния в зависимости от того, выше или ниже пороговый момент определенных значений, зависящих от пациента.
Преимущественно, в предпочтительных вариантах выполнения не требуется никакой зависящей от пациента информации, подлежащей предварительному программированию в протезном колене протезистом или пациентом. Используя информацию датчиков, измеренную в коленном протезе, сопротивления стояния автоматически приспосабливаются к нуждам человека без ноги, тем самым обеспечивая автоматическую приспосабливающуюся к пациенту систему.
Состояние 3 ("Пауза колена):
В одном предпочтительном варианте выполнения амортизация или сопротивление Состояния 3 (пауза колена) поддерживается в основном постоянной и минимизируется так, что пациент может легко сгибать колено. Предпочтительно это минимальное значение момента амортизации колена равно 0,4 Нм и в сильной степени определяется конкретным используемым коленным тормозом. Альтернативно, другие минимальные значения амортизирующего момента и/или изменяющиеся моменты могут эффективно использоваться, как требуется или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
В следующем предпочтительном варианте выполнения амортизация колена или момент Состояния 3 определяется, как описано выше для Состояний 1 и 2. То есть измеренные данные датчиков и, в частности, пиковое усилие и пиковый момент и/или профили осевого усилия и момента, приложенные к протезной коленной системе 110, используются контроллером 132 для регулировки сопротивления или амортизации до значений или профилей, которые во время предшествующих клинических исследований были определены как дающие приемлемое, или оптимизированное, или в основном жизненное поведение стояния.
Управление фазой ходьбы
В соответствии с одним предпочтительным вариантом выполнения обеспечена схема адаптивного управления моментом амортизации протезного колена, носимого пациентом, в фазе ходьбы, когда пациент перемещается с различными скоростями движения. Время контакта с землей протезной ступни, измеряемое от удара пяткой до отрыва пальцев, получается хорошо коррелированным со скоростью движения вперед. Схема содержит шаг непрерывного измерения времени контакта ступни как оценку скорости пациента вперед и адаптивной модуляции профилей амортизации в фазе ходьбы до тех пор, пока колено не станет удобным и будет двигаться естественно. Профиль амортизации в фазе ходьбы для сгибания колена итеративно модулируется для достижения конкретного диапазона угла сгибания колена. В отличие от этого для выпрямления колена амортизация колена модулируется для управления усилием воздействия выпрямляющейся ноги на искусственную коленную чашечку. Сходящиеся значения амортизации используются для автоматического управления амортизацией в фазе ходьбы на всех скоростях движения.
В одном предпочтительном варианте выполнения во время фазы стояния контроллер 132 вычисляет параметр, основанный на входных данных датчиков, который меняется со скоростью движения человека без ноги. Предпочтительно, этот параметр изменяется монотонно со скоростью передвижения. Как обсуждается ниже, этот параметр используется контроллером 132 для автоматического управления сопротивлениями колена в фазе ходьбы практически для всех пациентов на практически всех скоростях.
В одном предпочтительном варианте выполнения параметр управления скоростью является величиной времени, при котором протезная ступня остается в контакте с землей, или времени контакта ступни. В другом предпочтительном варианте выполнения параметр управления скоростью является максимальной скоростью сгибания, которая появляется между практически максимальным или полным выпрямлением, и сгибанием на 30 градусов, когда нога сгибается из Состояния 3 в Состояние 4. В других предпочтительных вариантах выполнения могут быть использованы другие пригодные параметры управления скоростью, уделяя должное внимание целям адаптивного управления сопротивлениями колена на различных скоростях, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Время контакта ступни предпочтительно измеряется или вычисляется в течение определенного периода времени. Предпочтительно, время контакта ступни измеряется во время одной фазы стояния. Альтернативно, время контакта ступни может быть измерено в течение одного или более циклов походки. Время контакта ступни предпочтительно вычисляется на основании сигналов от датчиков 140 осевых усилий. Измерение осевого усилия, не равного нулю, показывает, что протезная ступня находится в контакте с землей или другой поддерживающей поверхностью.
Как показано на фиг.7, обычно при увеличении скорости ходьбы уменьшается время контакта ступни. На фиг.7 время контакта ступни для одного субъекта указано напротив скоростей ходьбы вперед и бега, показывая уменьшение времени с увеличением скорости. Ось 192 Х представляет скорость вперед в см/с, а ось 194 Y показывает время контакта ступни в секундах в течение одной фазы стояния.
На фиг.7 треугольники показывают периоды времени контакта для здорового человека, передвигающегося на нескольких различных постоянных скоростях от медленной ходьбы 0,85 м/с до среднего бега 1,74 м/с. Как показано на фиг.7, время контакта в общем случае уменьшается с увеличением скорости. Линия регрессии наименьших квадратов подобрана для данных с наклоном 0,32 с2/м. Аналогичные регрессии наблюдаются как для людей без ног, так и здоровых людей. Данные собираются с использованием четырехкамерной кинематической системы сбора данных, основанной на камерах Selspot II от компании Selective Electronics Co., Партиль, Швеция (Неопубликованные данные из Лаборатории походки Главного госпиталя Массачусетса (Massachusetts General Hospital Gait Laboratory), Бостон, Массачусетс).
В соответствии с одним предпочтительным вариантом выполнения контроллер 132 в итеративном процессе определяет, как сопротивления или амортизация колена в фазе ходьбы модулируются временем контакта ступни или скоростью передвижения. Полный биологический диапазон времени контакта ступни хранится в памяти 150 коленного процессора 132. Обычно человек невысокого роста имеет в среднем более короткие периоды времени контакта ступни по сравнению с людьми высокого роста. Полный биологический диапазон, хранящийся в памяти 150, предпочтительно включает в себя оба этих крайних значения.
В одном предпочтительном варианте выполнения память 150 хранит время контакта ступни от нуля до двух секунд, что обычно более чем достаточно для покрытия полного биологического диапазона периодов времени контакта ступни. В других предпочтительных вариантах выполнения память может эффективно хранить больший или меньший диапазон периодов времени контакта ступни, уделяя должное внимание целям покрытия полного биологического диапазона периодов времени контакта ступни и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Предпочтительно, диапазон времени контакта ступни разделен на временные окна или части внутри памяти 150 микропроцессора. Когда человек без ноги движется от медленной ходьбы до быстрой, отбираются различные временные окна или диапазоны двигательных скоростей. Поскольку полный биологический диапазон разделен, каждый человек без ноги независимо от роста, веса или размеров тела пробует множество временных окон, когда движется от медленной до быстрой ходьбы или бега.
В одном предпочтительном варианте выполнения размер подразделения равен 100 мс, тем самым давая в целом 20 временных окон в течение двухсекундного диапазона или интервала времени контакта ступни. Любой человек без ноги будет обычно выдавать не все, но большую часть из 20 временных окон при движении от медленной до быстрой скорости перемещения. В других предпочтительных вариантах выполнения размер подразделения может быть с эффективностью выбран альтернативно, как требуется или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Схема управления одного предпочтительного выполнения предпочтительно модулирует профили амортизации колена в каждом временном окне. В Состоянии 4 значения амортизации модулируются в каждом временном окне для управления пиковым углом сгибания, а в Состоянии 5 усилие воздействия выпрямляющейся ноги управляется относительно искусственной коленной чашечки. На основании данных датчиков, поданных на контроллер 132 (как обсуждалось выше), контроллер 132 посылает должные командные сигналы или инструкции коленному тормозу или амортизатору 130.
Состояние 4 (Сгибание при ходьбе):
Когда человек без ноги впервые идет или делает первый шаг, используя протезную коленную систему 110, управляемую предпочтительными схемами управления по изобретению, предпочтительно микропроцессор или контроллер 132 изначально устанавливает или регулирует амортизацию или сопротивление в Состоянии 4 вращению колена на наименьшее значение в каждом временном окне. Следовательно, когда человек без ноги делает первый шаг, момент амортизации колена в Состоянии 4 минимизируется, и колено свободно шагает через начало фазы ходьбы.
Предпочтительно, это минимальное значение момента амортизации колена равно 0,4 Нм и в сильной степени определяется конкретным используемым коленным тормозом. Альтернативно, другие минимальные значения амортизирующего момента и/или изменяющиеся моменты могут эффективно использоваться, как требуется или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Для последующих шагов или циклов походки, после первого шага, контроллер 132 предпочтительно увеличивает амортизацию тормоза путем отправки должных командных сигналов или инструкций коленному тормозу 130, каждый раз, когда колено сгибается на угол больше фиксированного или заранее заданного итогового угла. Для идущих здоровых людей пиковый угол сгибания во время начала фазы ходьбы обычно не превышает 80° (см. фиг.3).
Следовательно, в соответствии с одним предпочтительным вариантом выполнения, для достижения цикла походки, который будет достаточно естественным или биологическим, итоговый угол в Состоянии 4 устанавливается равным 80° для управления пиковым углом сгибания протезной коленной системы 110. В других предпочтительных вариантах выполнения и/или других уровнях деятельности или внешних условиях итоговый угол Состояния 4 может быть выбран альтернативно, если необходимо или желательно, уделяя должное внимание целям обеспечения в основном жизненной реакции, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Микропроцессор 132 предпочтительно увеличивает амортизацию на величину, пропорциональную ошибке или разности между реальным углом сгибания, измеренным датчиком 134 угла, и итоговым углом. Увеличенная амортизация уменьшает пиковый угол сгибания для последующих циклов походки, но предпочтительно только в тех временных окнах или скоростях перемещения, которые вырабатываются человеком без ноги.
В Состоянии 4, когда пиковый угол сгибания падает ниже итогового угла, микропроцессор 132 уменьшает амортизирующий момент путем отправки должных командных сигналов или инструкций коленному тормозу 130. Это гарантирует, что уровни амортизации не являются излишне высокими.
Предпочтительно, амортизирующий момент уменьшается, когда пиковый угол сгибания падает ниже итогового угла для N последовательных двигательных шагов, циклов или больших шагов. Одним предпочтительным значением для N является 20 двигательных циклов или циклов походки, хотя могут эффективно использоваться и другие значения. Амортизация тормоза предпочтительно уменьшается на величину, пропорциональную ошибке или разности между реальным углом сгибания, измеренным датчиком 134 угла, и итоговым углом. Внутри любого конкретного временного окна или интервала уменьшенная амортизация увеличивает пиковый угол сгибания для последующих циклов походки.
Обычно, при более высоких скоростях ходьбы требуется более высокий уровень амортизации, чтобы удержать пиковый угол сгибания в Состоянии 4 ниже порога итогового угла. Следовательно, для увеличения скорости приспособления Состояния 4 в одном предпочтительном варианте выполнения схема управления разработана так, что эти уровни амортизации на более высоких скоростях амортизации или временные окна по меньшей мере так же высоки, как высоки уровни амортизации на более низких скоростях или временных окнах.
Кроме того, предпочтительно, что уровни амортизации в Состоянии 4, приложенные к каждому временному окну в течение одного цикла походки или двигательного цикла, постоянны, хотя они могут быть изменяющимися и зависящими от углов. В дополнение к этому, модуляция уровней амортизации в Состоянии 4 в одном или более временных окнах может вовлекать изменение амортизации в фиксированном или заранее заданном диапазоне коленных углов, либо изменение диапазона углов, к которым применяется амортизация, либо их комбинацию.
Когда человек без ноги продолжает использовать протезную коленную систему 110 и пробует различные диапазоны скорости ходьбы, бега или других двигательных скоростей, амортизация колена в Состоянии 4 постепенно сходится внутри каждого временного окна до тех пор, пока пиковое сгибание колена не упадет ниже конечного угла или будет недалеко от него практически для всех скоростей - ходьбы, бега или других двигательных скоростей. Оптимизированные значения или профили амортизирующего момента для каждого временного окна или двигательной скорости хранятся в памяти 150 микропроцессора. Следовательно, когда воплощена итерационная адаптивная схема управления, человек без ноги может быстро ускориться от медленной ходьбы до быстрой ходьбы, точно так же пробуя различные временные окна и, следовательно, различные уровни амортизации в Состоянии 4.
Состояние 5 (Выпрямление при ходьбе):
Аналогичная схема или стратегия используется для управления усилием воздействия, когда выпрямляющийся протез ударяет по искусственной коленной чашечке. Как отмечено выше, эта искусственная коленная чашечка служит в качестве стопора выпрямления.
Когда человек без ноги впервые идет или делает первый шаг, используя протезную коленную систему 110, управляемую предпочтительными схемами управления по изобретению, предпочтительно, микропроцессор или контроллер 132 изначально устанавливает или регулирует амортизацию в Состоянии 5 на наименьшее значение в каждом временном окне. Следовательно, когда человек без ноги делает первый шаг, момент амортизации колена в Состоянии 5 минимизируется, и колено выпрямляется из пикового угла сгибания в Состоянии 4 до угла максимального выпрямления (180°) в Состоянии 5. Контакт с искусственной коленной чашечкой предотвращает дальнейшее выпрямление.
Предпочтительно, это минимальное значение момента амортизации колена равно 0,4 Нм и в сильной степени определяется конкретным используемым тормозом колена. Альтернативно, другие минимальные значения амортизирующего момента и/или изменяющиеся моменты могут эффективно использоваться, как требуется или желательно, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Для последующих шагов или циклов походки, после первого шага, контроллер 132 предпочтительно вычисляет среднее усилие воздействия выпрямляющейся ноги на искусственную коленную чашечку в каждом интервале или временном окне с минимизированной амортизацией. От наименьшего числа М временных окон или интервалов к наибольшему, если два последовательных интервала не являются прямыми соседями, выполняется линейная экстраполяция, чтобы оценить средние усилия воздействия для промежуточных интервалов. Например, если средние величины вычислены для интервалов "10" и "12", но не для интервала "11", то вычисляется линейная экстраполяция из усилия воздействия, соответствующего интервалу "10", к усилию воздействия, соответствующему интервалу "12". Эта линейная функция затем используется для оценки усилия воздействия для интервала "11". Область интервалов М предпочтительно содержит от трех до пяти интервалов или временных окон, хотя может быть эффективно использовано меньшее или большее количество, если требуется или желательно.
После того как вычисляются средние усилия М воздействия и линейные экстраполяции формулируются из минимального и максимального интервалов, значения амортизации колена выбираются с использованием клинически определенного отношения, относящегося к усилию воздействия и оптимальной амортизации выпрямления. Следовательно, человек без ноги чувствует амортизацию, стремящуюся уменьшить скорость выпрямляющейся ноги, но только для тех скоростей ходьбы, которые относятся в области М интервалов. Для интервалов выше максимума и ниже минимума по умолчанию используется минимальная амортизация до тех пор, пока собираются дополнительные данные и вычисляются средние усилия воздействия. Для интервалов выше и ниже исходной области М интервалов выполняется линейная экстраполяция, чтобы оценить средние усилия воздействия для промежуточных интервалов. Например, если максимум исходных интервалов М равен "14", а среднее усилие воздействия вычислено для интервала "17", то затем усилия воздействия оцениваются для интервалов "15" и "16" с помощью линейной функции из среднего усилия воздействия, соответствующего интервалу "14", и среднее усилие, соответствующее интервалу "17". Когда средние усилия воздействия вычислены для интервалов над областью исходных интервалов М или ниже нее, значения амортизации колена выбираются с помощью клинически определенного отношения, относящегося к усилию воздействия для оптимальной амортизации выпрямления.
Это клинически определенное отношение, относящееся к усилию воздействия для оптимальной амортизации выпрямления, предпочтительно получают или определяют клиническим исследованием с использованием пациентов при различных скоростях ходьбы, бега и/или других двигательных скоростях. Предпочтительно, это клинически определенное отношение, относящееся к усилию воздействия для оптимальной амортизации выпрямления, получают или определяют клиническим исследованием с использованием пациентов, имеющих различные размеры тела (массу). Это клинически определенное отношение предпочтительно сохраняется в памяти 150 системы.
Для каждого временного окна или интервала, когда выбирается оптимальное значение амортизации выпрямления, микропроцессор 132 снова вычисляет среднее усилие воздействия, и это новое среднее усилие затем используется как целевое. Если проявляются нарушения в работе системы, которые существенно меняют величину усилия воздействия внутри конкретного интервала, то амортизация выпрямления модулируется до тех пор, пока усилие воздействия не будет находиться снова рядом или поблизости от итогового усилия воздействия. Например, в конкретном интервале, если среднее усилие воздействия после амортизации остается 100 Н, а расстройство заставляет выпрямляющуюся ногу воздействовать на искусственную коленную чашечку с усилием 150 Н, то амортизация выпрямления увеличивается для этого интервала до тех пор, пока усилие воздействия не будет находиться снова рядом или поблизости от итоговых 100 Н. С этой адаптивной подпрограммой человек без ноги может менять обувь, от легкой по весу обуви до тяжелой обуви, и по-прежнему комфортно ходить без необходимости возвращаться к протезисту на перепрограммирование.
Среднее усилие воздействия выпрямляющейся ноги на искусственную коленную чашечку предпочтительно вычисляется контроллером 132 с использованием сигналов или данных, обеспеченных датчиками, находящимися рядом с протезом. Датчики усилий воздействия предпочтительно содержат датчики 140 и включают в себя один или более тензометров, установленных или механически соединенных с корпусом 141, как обсуждалось выше. Основываясь на вычисленном или определенном усилии воздействия, контроллер 132 обеспечивает должные командные сигналы коленному тормозу 130 для управления амортизацией колена.
Амортизация Состояния 5 в каждом временном окне или двигательной скорости может быть промодулирована несколькими способами в предпочтительных вариантах выполнения схемы управления по изобретению. Например, модуляция уровней амортизации Состояния 5 в одном или более временных окнах может включать в себя изменение амортизации в фиксированном или заранее определенном диапазоне коленного угла, или применяется изменение диапазона углов, в котором применена амортизация, либо их комбинация. Дополнительно, уровни амортизации Состояния 5, примененные в одном или более временных окнах в течение одного цикла походки или двигательного цикла, могут быть постоянными, изменяющимися и/или зависящими от углов.
В соответствии с одним предпочтительным вариантом выполнения схема управления модулирует амортизацию колена в Состоянии 5 внутри фиксированного или заранее заданного диапазона углов. Например, момент амортизации колена увеличивается или уменьшается в конкретном диапазоне угла выпрямления, таком как в диапазоне от 130° до 180°, чтобы увеличить или уменьшить амортизацию внутри конкретного временного окна.
В соответствии с другим предпочтительным вариантом выполнения схема управления поддерживает уровни амортизации в Состоянии 5 в основном постоянными, и вместо этого модулирует диапазон углов, к которому применяется амортизация колена. Например, амортизация колена постоянна и увеличена до максимума, и эта амортизация применяется в диапазоне углов выпрямления от 170° до 180°. Для увеличения амортизации Состояния 5 начальный угол выпрямления для начала амортизации колена должен быть изменен со 170° до 160°, чтобы увеличить амортизацию Состояния 5 в конкретном временном окне или двигательной скорости.
Обычно, при более высоких скоростях ходьбы требуется более высокий уровень амортизации для удержания усилия воздействия на искусственную коленную чашечку в приемлемом диапазоне. Однако для увеличения скорости адаптации Состояния 5 в одном предпочтительном варианте выполнения схема управления разработана так, что уровни амортизации при более высоких скоростях ходьбы или во временных окнах по меньшей мере так же велики, как уровни амортизации при более медленных скоростях или временных окнах.
Когда человек без ноги продолжает использовать протезную коленную систему 110 и пробует различные диапазоны скоростей ходьбы и бега, амортизация колена в Состоянии 5 постепенно сходится внутри каждого временного окна до тех пор, пока усилия воздействия выпрямляющейся ноги на искусственную коленную чашечку удерживаются на приемлемом уровне практически для всех скоростей ходьбы, бега или других двигательных скоростей. Оптимизированные значения или профили амортизирующего момента для каждого временного окна или двигательной скорости хранятся в памяти 150 микропроцессора. Следовательно, когда воплощается итеративная адаптивная схема управления, человек без ноги может быстро ускориться от медленной до быстрой ходьбы, при этом так же пробуя различные временные окна и, следовательно, различные уровни амортизации внутри Состояния 5.
Когда пациент продолжает далее использовать протезную коленную систему 110, дальнейшие автоматические уточнения и тонкие настройки могут быть выполнены системой 110, если необходимо. Протез по предпочтительным вариантам выполнения является самообучающейся системой, которая направляется клиническим (протезным) и биомеханическим знанием. Например, биомеханическое знание (хранящееся в памяти системы) включает в себя информацию, относящуюся к механике обычной человеческой ходьбы/бега, как обсуждалось выше со ссылкой на фиг.1.
Преимущественно, схеме управления и системе протезного колена по предпочтительным вариантам выполнения не требуется ничего зависящего от пациента и, следовательно, не требуется никакого предварительного программирования протезистом или человеком без ноги, чтобы приспособить различные двигательные скорости к различным пациентам. Система способна приспосабливаться к различным типам помех, когда пациент уходит от аппаратуры протезиста, поскольку она способна приспосабливаться к пациенту и способна приспосабливаться к скорости. Желательно, чтобы это также уменьшало затраченные время и средства и существенно устраняло или уменьшало неудобства, дискомфорт и утомление у пациента, возникающие в противоположность этому во время продолжительной регулировки или испытательного срока.
Схема управления и протез по предпочтительным вариантам выполнения позволяют пациенту выполнять широкий диапазон действий. Это включает в себя обычную ходьбу или бег по ровной или наклонной поверхности, приседания, шаги вверх и вниз и другие ситуации, например, когда пользователь поднимает чемодан.
Магнитореологический тормоз колена
Предпочтительные выполнения магнитореологического тормоза или коленного привода в соответствии с настоящим изобретением описаны в совместно поданной заявке на патент США №90/767367 от 22 января 2001 года, озаглавленной "УПРАВЛЯЕМОЕ ЭЛЕКТРОНИКОЙ ПРОТЕЗНОЕ КОЛЕНО", полное описание которой включено сюда посредством ссылки. В целях простоты и краткости описания ниже приводится только краткое описание этого магнитореологического тормоза или коленного привода.
Фиг.8 является упрощенным схематическим изображением вращающегося протезного коленного тормоза или магнитореологической (МР) тормозной системой 210 в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения. Коленный привод 210 включает в себя по существу центральный сердечник 212, в основном окруженный или обернутый электромагнитом или магнитной катушкой 214 и находящийся в механическом соединении с парой боковых пластин или дисков 216, 218. Путем пропускания переменного управляемого тока через электромагнит 214 создается переменное магнитное поле. Предпочтительно, сердечник 212 и боковые пластины 216, 218 изготавливаются из железистого намагничиваемого или магнитного материала и т.п. Более предпочтительно, сердечник 212 и боковые пластины 216, 218 изготавливаются из магнитно-мягкого материала с высокой индукцией насыщения и высокой магнитной проницаемостью.
Протезный коленный тормоз или привод 210 далее включает в себя множество внутренних лопастей или пластин 220, находящихся в механической связи с внутренней рейкой 222. Эта внутренняя рейка 222 в общем случае ограничивает или окружает электромагнит 214 и связана или механически соединена с боковыми пластинами 216, 218. Лопасти 220 предпочтительно расположены концентрически вокруг тормозной оси 224 вращения. Внутренняя рейка 222 предпочтительно способна вращаться вокруг оси 224 вращения коленного сустава, а следовательно, также способны вращаться и лопасти или роторы 220 и боковые пластины 216, 218 сердечника. Вращение внутренней рейки 222 соответствует вращению или движению нижней (ниже колена) части ноги.
Протезный коленный тормоз или привод 210 также содержит множество внешних лопастей или пластин 230 в механической связи с внешней рейкой 232. Внешняя рейка 232 в общем случае ограничивает или окружает внутреннюю рейку 222. Лопасти 230 предпочтительно расположены концентрически вокруг тормозной оси 224 вращения. Внешняя рейка 232 предпочтительно способна вращаться вокруг оси 224 вращения коленного сустава, а следовательно, так же вращаются и лопасти или статоры 230. Вращение внешней рейки 232 соответствует вращению или движению верхней (выше колена) части ноги. Предпочтительно внешняя рейка или корпус 232 содержит средство облегчения соединения протезного коленного сустава 210 с пригодным углублением для культи или тому подобным. Внешняя рейка 232, а следовательно, и статоры 230 предпочтительно либо связаны без вращения с углублением для культи или с оставшейся конечностью, либо прикреплены без возможности вращения по отношению к ней.
Множество роторов 220 и статоров 230 разнесены в чередующемся порядке и промежутки между соседними лопастями 220 и 230 содержат магнитореологическую (МР) жидкость 234, которая, таким образом, остается в полости или проходе, сформированном между внутренней рейкой 222 и внешней рейкой 232. В одном предпочтительном варианте выполнения МР жидкость 234 в промежутках или микропромежутках между соседними роторами 220 и статорами 230 находится в форме тонких смазочных пленок между соседними роторами 220 и статорами 230. Сдвигание МР жидкости, происходящее между боковыми пластинами 216, 218 и соседними статорами 230, также может внести вклад в амортизацию колена.
Во время вращения коленного сустава МР жидкость во множестве промежутков между роторами 220 и статорами 230 сдвигается для выработки амортизирующего момента для управления вращением конечности. Лопасти или диски 220 и 230 предпочтительно сформированы из железистого, намагничиваемого или магнитного материала и т.п. Более предпочтительно, лопасти или диски 220 и 230 сформированы из материала с высокой магнитной проницаемостью и магнитной мягкостью, так как это практично с точки зрения механики.
Протезный коленный привод 210 далее включает в себя пару шарикоподшипников 226, 228, соединенных или связанных с соответствующими боковыми пластинами 216, 218. Шарикоподшипники 226, 228 далее соединены или связаны с соответствующими боковыми стенками или установочными вилками 236, 238. Таким образом, между внутренней рейкой 222 и установочными вилками 236, 236 создается вращательное соединение. Установочные вилки 236, 238 в сочетании с внешней рейкой 232 формируют один основной внешний каркас коленного привода 210. Предпочтительно, боковые стенки или установочные вилки 236, 238 содержат средства для облегчения соединения протезного коленного сустава 210 с пригодной опорой, голенной частью или чем-то подобным, как описано ниже.
Предпочтительно, центральный сердечник 212 и электромагнит 214 также вращаются вместе с вращением внутренней рейки 222, роторов 220, боковых пластин 216, 218 сердечника и крепежных вилок 236, 238. Статоры 230 вращаются вместе с вращением внешней рейки 232.
Роторы 220 закреплены с возможностью вращения относительно внутренней рейки 222, а статоры 230 закреплены с возможностью вращения относительно внешней рейки 232. Роторы 220 могут вращаться во время различных этапов передвижения или вращения колена и вокруг оси вращения 224 колена, тогда как статоры 230 практически неподвижны в отношении вращения, либо статоры 230 могут вращаться, тогда как роторы 220 практически неподвижны в отношении вращения, либо как роторы 220, так и статоры 230 могут одновременно вращаться, либо быть практически неподвижными в отношении вращения. Термины "ротор" и "статор" используются, чтобы разделить внутренние лопасти 220 и внешние лопасти 230, хотя как роторы 220, так и статоры 230 могут вращаться, и чтобы показать, что между роторами 220 и статорами 230 создается относительное вращательное движение (с МР жидкостью, которая начинает сдвигаться в промежутки между соседними роторами 220 и статорами 230). Если требуется, лопасти 220 можно называть "внутренними роторами", а лопасти 230 можно называть "внешними роторами".
Приведение магнита 214 в действие заставляет вырабатывать или создавать в коленном приводе 210 магнитное поле, цепь или контур 240. В одном предпочтительном варианте выполнения магнитное поле 240 проходит через центральный сердечник 212, выходит в радиальном направлении наружу через боковую пластину 218, в поперечном направлении через разнесенный набор роторов 220 и статоров 230 и магнитореологическую жидкость 234, и в радиальном направлении внутрь через боковую пластину 216. Часть магнитного поля 240, проходящая через сердечник 212 и боковые пластины 216, 218, в общем случае определяет магнитный возвратный контур, тогда как активное или функциональное магнитное поле в общем случае определяется магнитным контуром через роторы 220, статоры 230 и МР жидкость 234.
Магнитореологическая (МР) жидкость 234 подвергается изменению реологии или вязкости, которое зависит от величины приложенного магнитного поля. В свою очередь, это изменение вязкости жидкости определяет величину сдвигающей силы/усилия, выработанного момента или сопротивления скручиванию, а следовательно, и степень амортизации, обеспечиваемой протезным коленным тормозом 210. Таким образом, путем управления величиной этого магнитного поля управляется вращательное движение искусственной конечности, например, для управления сгибанием и выпрямлением во время фаз ходьбы и стояния на месте, чтобы обеспечить более естественное и безопасное передвижение человека без ноги.
В одном предпочтительном варианте выполнения роторы 220 и/или статоры 230 могут смещаться в поперечном направлении 242, а следовательно, под воздействием магнитного поля могут тереться о соседние роторы 220 и/или статоры 230 с переменным усилием, определяемым напряженностью магнитного поля, для создания "гибридного" магнитореологического и фрикционного амортизирующего тормоза. В другом предпочтительном варианте выполнения роторы 220 и статоры 230 зафиксированы в продольном направлении в положении относительно реек 222 и 232, и, следовательно, тормозящий эффект в основном чисто магнитореологический или вязкий. Альтернативно, некоторые роторы 220 и/или статоры 230 могут быть зафиксированы в продольном направлении, тогда как остальные могут смещаться в продольном направлении, как требуется или как желательно, уделяя должное внимание целям обеспечения практически естественного ощущения и/или безопасного протезного устройства, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь. В одном варианте выполнения боковые пластины 216, 218 могут смещаться в поперечном направлении и способствовать фрикционной амортизации из-за фрикционного контакта с соседними статорами 230.
Преимуществом представляется тот факт, что при работе в распределенном режиме в протезном колене, приводимом в действие магнитореологически, по настоящему изобретению не имеется либо имеется совсем незначительное наращивание давления. Это существенно устраняет или уменьшает шансы на утечку жидкости и повреждение колена, а следовательно, желательно увеличивает безопасность устройства.
Также является преимуществом тот факт, что множественные поверхности сдвига или поверхности контакта с потоком, обеспеченные предпочтительными вариантами выполнения настоящего изобретения, ведут себя как усилитель момента и позволяют уровню вязкого момента останавливаться на желаемом максимальном значении без использования дополнительной передачи или другой вспомогательной составляющей. Например, если две поверхности контакта с потоком могут обеспечить максимальный вязкий момент примерно 1 Н/м, то 40 поверхностей контакта с потоком будут способны обеспечить вязкий амортизирующий момент примерно 40 Н/м. Напротив, если для увеличения вязкого момента используется повышающая передача 40:1, как недостаток, нежелательно увеличиваются не только проявляемая системой инерция, усиленная коэффициентом 1600, но и вес, размер и сложность системы.
Множественные поверхности сдвига или поверхности контакта привода протезного колена по предпочтительным вариантам выполнения также в качестве преимущества позволяют достигать широкого диапазона динамического момента, что обеспечивает безопасное и/или более естественное передвижение пациента. Желательно, чтобы протезное колено, приводимое в действие магнитореологически, по предпочтительным вариантам выполнения обеспечивало быструю и точную реакцию. Опять-таки, это позволяет пациенту передвигаться безопасным и/или более естественным образом.
Фиг.9 и 10 показывают магнитореологический вращающийся протезный коленный привод, тормоз или амортизатор 210, имеющий свойства и преимущества в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения. Протезный коленный привод 210 вырабатывает управляемые рассеивающие усилия, предпочтительно в основном вдоль или вокруг оси вращения 224 колена. Выполнение коленного привода по фиг.9 и 10 в основном аналогично по работе и структуре с выполнением коленного привода по фиг.8 и, следовательно, в целях простоты и краткости описания ниже приводится только краткое описание выполнения по фиг.9 и 10.
Управляемый электроникой коленный привод 210 в общем случае содержит практически центральный сердечник 212, находящийся в механической связи с парой способных вращаться боковых пластин 216, 216, электромагнит 214, множество лопастей или роторов 220, находящихся в механической связи со способной вращаться внутренней рейкой 222, множество лопастей или статоров 230, находящихся в механической связи со способной вращаться внешней рейкой 232, пару шарикоподшипников 226 228 для передачи вращательного движения к паре внешних боковых стенок или вилок 236, 238. Вращение происходит в основном вокруг оси вращения 224 колена.
Множество роторов 220 и статоров 230 предпочтительно разнесены чередующимся образом, и промежутки или микропромежутки между соседними лопастями 220 и 230 содержат тонкие смазочные пленки из магнитореологической (МР) жидкости, которая тем самым оседает в полости или проходе, сформированном между внутренней рейкой 222 и внешней рейкой 232. Это предпочтительное выполнение обеспечивает управляемый и надежный искусственный коленный сустав, который, в качестве преимущества, имеет широкий диапазон динамического момента за счет сдвига МР жидкости в множественных промежутках или поверхностях контакта с потоком между соседними роторами 220 и статорами 230.
Предпочтительно, стержни 248 с резьбой на концах и гайки 250 используются для скрепления выбранных составляющих протезного колена 210, тем самым позволяя проводить операции непосредственной сборки и разборки с минимумом крепежных деталей. Альтернативно или в дополнение к этому различные другие типы крепежных деталей, например винты, штифты, замки, зажимы и т.п., могут эффективно использоваться, как требуется или как желательно, уделяя должное внимание целям обеспечения прочного прикрепления и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
В одном предпочтительном варианте выполнения протезный коленный тормоз 210 далее содержит систему или узел стопора сгибания. Система стопора сгибания управляет максимально возможным углом сгибания посредством физического ограничения вращения между внешними боковыми вилками 236, 238 и внешней рейкой 232, а следовательно, и вращения коленного сустава.
В одном предпочтительном варианте выполнения протезный коленный тормоз 210 далее содержит систему или узел стопора выпрямления. Система стопора выпрямления управляет максимально возможным углом выпрямления посредством физического ограничения вращения между внешними боковыми вилками 236, 238 и внешней рейкой 232, а следовательно, и вращения коленного сустава.
В одном предпочтительном варианте выполнения протезный коленный тормоз 210 далее содержит помощник выпрямления, чтобы помочь выпрямить ногу путем побуждения или склонения ноги к выпрямлению применением управляемого момента или усилия. Любое из устройств, такое как подпружиненный помощник выпрямления, известное из уровня техники, может быть использовано вместе с настоящим изобретением.
В одном предпочтительном варианте выполнения протезный коленный тормоз 210 содержит 40 роторов 220 и 41 статор 230, разнесенные в чередующемся порядке. Это выражается в 40 поверхностях контакта с потоком или промежутках жидкости, в которых остается магнитореологическая (МР) жидкость. В другом предпочтительном варианте выполнения число роторов 220 равно от 10 до 100, количество статоров 230 равно от 11 до 101, так что количество поверхностей контакта МР жидкости с роторами, которые производят торможение в присутствии магнитного поля, вдвое больше количества роторов. В другом предпочтительном варианте выполнения количество роторов находится в диапазоне от 1 до 100. Еще в одном предпочтительном варианте выполнения количество статоров 230 находится в диапазоне от 1 до 100. В других предпочтительных вариантах выполнения количество роторов 220, статоров 230 и поверхностей контакта с потоком может быть выбрано альтернативно, как необходимо или желательно, уделяя должное внимание целям обеспечения широкого диапазона динамического момента, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Преимущественно, вызванный предел текучести или вязкий момент пропорционален области перекрытия между парой ротор-статор, удвоенной по сравнению с количеством роторов (то есть количество поверхностей контакта МР жидкости с роторами, которые производят тормозящий момент при наличии магнитного поля). Это желательно позволяет вязкому моменту или пределу текучести увеличиваться или уменьшаться путем выбора или предварительного задания количества роторов 220 и/или статоров 230 и/или перекрывающих или сопряженных поверхностных областей между соседними роторами 220 и/или статорами 230. Другое преимущество заключается в том, что это обеспечивает управление по всему размеру, который является радиальным размером и поперечным размером протезного тормоза 210, приводимого в действие магнитореологически. Например, общая конфигурация колена может быть выполнена больше в радиальном направлении и тоньше в поперечном, обеспечивая при этом тот же диапазон вязкого момента путем должного выбора количества поверхностей контакта с потоком и области перекрытия совместно используемых поверхностей.
Желательно минимизировать промежуток МР жидкости между соседними роторами 220 и статорами 230, поскольку энергия, необходимая для насыщения всего промежутка МР жидкости, в сильной степени зависит от размера промежутка. Таким образом, в качестве преимущества, меньшие размеры промежутка делают тормоз 210, приводимый в действие магнитореологически, более эффективным и уменьшают потребление энергии.
Предпочтительно размер промежутка МР жидкости также выбирается таким, что при отсутствии приложенного магнитного поля присутствует только сила вязкой амортизации или составляющая момента от сдвига МР жидкости между поверхностями соседних ротора и статора. Таким образом, в условиях отсутствия поля между роторами 220 и статорами 230 составляющая фрикционного момента отсутствует.
Соответственно, в одном предпочтительном варианте выполнения, энергия, требуемая для насыщения МР жидкости, уменьшается, и динамический диапазон колена увеличивается путем минимизации размера промежутков МР жидкости. В этом выполнении промежуток не уменьшается настолько, чтобы в условиях отсутствия поля между поверхностями соседних ротора и статора происходило нормальное усилие, вызывая фрикционное скольжение. Отсутствие трения между роторами и статорами дает возможность коленному суставу раскачиваться свободно, тем самым обеспечивая более широкий динамический диапазон. Следует отметить, что вязкая амортизация при отсутствии поля не увеличивается сильно при уменьшении промежутка жидкости, поскольку МР жидкость проявляет свойство, известное как утончение от степени сдвига, где вязкость жидкости уменьшается с увеличением степени сдвига.
В одном предпочтительном варианте выполнения размер или ширина промежутка МР жидкости между соседними роторами 220 и статорами 230 равна 40 микрон (мкм) или менее. В другом предпочтительном варианте выполнения размер или ширина промежутка МР жидкости между соседними роторами 220 и статорами 230 находится в диапазоне от 10 мкм до 100 мкм. В других предпочтительных вариантах выполнения размер промежутка МР жидкости может меняться чередующимся образом и/или конфигурироваться с требуемой или желаемой эффективностью, уделяя должное внимание целям обеспечения энергетически эффективного протезного коленного привода 210, имеющего широкий диапазон динамического момента, и/или достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Управляемый электроникой протезный коленный тормоз, приводимый в действие магнитореологически, по предпочтительным вариантам выполнения обеспечивает высокоскоростное постоянное чувствительное управление движением колена, но при этом является надежным и допустимым для человека без ноги. Предпочтительные варианты выполнения обеспечивают преимущественно улучшенную стабильность, баланс походки и энергетическую эффективность для людей без ноги и повторяют и/или практически восстанавливают динамику естественного коленного сустава.
При работе электромагнит или магнитная катушка 214 приводится в действие, как необходимо, выбранным или заранее заданным электрическим сигналом, напряжением или током, для выработки активного переменного магнитного поля, проходящего практически перпендикулярно множеству поверхностей роторов и статоров и через МР жидкость или пленку между соседними роторами 220 и статорами 230 для выработки изменяющегося амортизирующего момента (или вращательного резистивного усилия), который точно и аккуратно управляет вращательным движением протезного колена 210. Как обсуждалось выше, в соответствии с одним предпочтительным вариантом выполнения этот момент содержит фрикционную амортизирующую составляющую.
Желательно, чтобы протезное колено 210, приводимое в действие магнитореологически, по предпочтительным вариантам выполнения обеспечивало быструю и точную реакцию. Материалы в МР частицах реагируют на приложенное магнитное поле за миллисекунды, тем самым обеспечивая управление в реальном времени реологией жидкости и движением колена. Это облегчает обеспечение пациенту возможности перемещаться безопасным и/или более естественным образом.
Преимущественно вязкий амортизирующий момент вырабатывается путем сдвига МР жидкости. Следовательно, практически нет наращивания или изменения давления жидкости, либо оно совсем незначительно, в протезном колене 210, приводимом в действие магнитореологически, по настоящему изобретению. Это значительно устраняет или уменьшает шансы утечки жидкости и повреждения колена и, следовательно, желательно добавляет безопасности. Более того, нет необходимости использовать дорогие и/или сравнительно сложные компоненты, такие как подшипники давления и им подобные, для обеспечения надежного уплотнения.
Другое преимущество заключается в том, что множество сдвигающих поверхностей или поверхностей контакта с потоком между соседними роторами 220 и статорами 230 ведут себя как умножитель момента и позволяют уровню вязкого момента (и/или фрикционному моменту) увеличиваться до желательного максимального значения без использования дополнительной передачи и других вспомогательных составляющих. Кроме того, гибкость в выборе области поверхности перекрытия между соседними роторами 220 и статорами 230 также может увеличивать или уменьшать максимальный достижимый вязкий момент (и/или фрикционный момент). Таким образом, могут быть обеспечены желательный широкий динамический момент или диапазон сопротивления скручиванию, как необходимо или желательно, что добавляет универсальности изобретению без существенных добавлений в размере системы, ее весе и сложности.
В одном предпочтительном варианте выполнения протезное колено по настоящему изобретению обеспечивает максимальный динамический момент, равный 40 Нм (Ньютон-метр). В другом предпочтительном варианте выполнения протезное колено по настоящему изобретению обеспечивает динамический момент в диапазоне от 0,5 Нм до 40 Нм. Еще в одном предпочтительном варианте выполнения протезное колено по настоящему изобретению обеспечивает динамический момент в диапазоне от 1 Нм до 50 Нм. В других предпочтительных вариантах выполнения протезное колено по настоящему изобретению может обеспечить другие диапазоны динамического момента с необходимой или желаемой эффективностью, уделяя должное внимание целям достижения одной или более выгод и преимуществ, как описано или предложено здесь.
Также является преимуществом то, что оптимальная толщина промежутка МР жидкости между соседними роторами 220 и статорами 230 обеспечивает более высокий максимальный момент и требует меньшего потребления энергии, предпочтительно 10 Вт или меньше. Это добавляет эффективности и практичности тормозу 210 протезного колена, приводимому в действие магнитореологически, по предпочтительным вариантам выполнения, и также экономит стоимость, так как могут использоваться более низкое напряжение и/или менее сложный источник питания.
Хотя компоненты и методы настоящего изобретения описаны с определенной степенью подробности, должно быть понятно, что многие изменения могут быть выполнены в описанных выше конкретных конфигурациях, конструкциях и методологии без отхода от сущности и объема этого описания. Должно быть понятно, что изобретение не ограничено вариантами выполнения, описанными здесь в целях примера, но должно определяться только четким прочтением формулы изобретения, включая полный диапазон эквивалентности, к которому приписан каждый элемент.
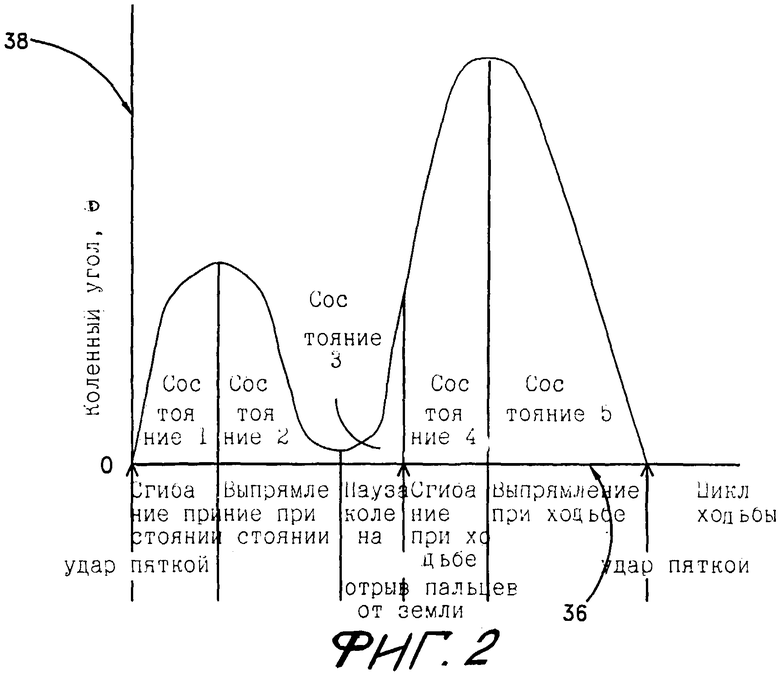
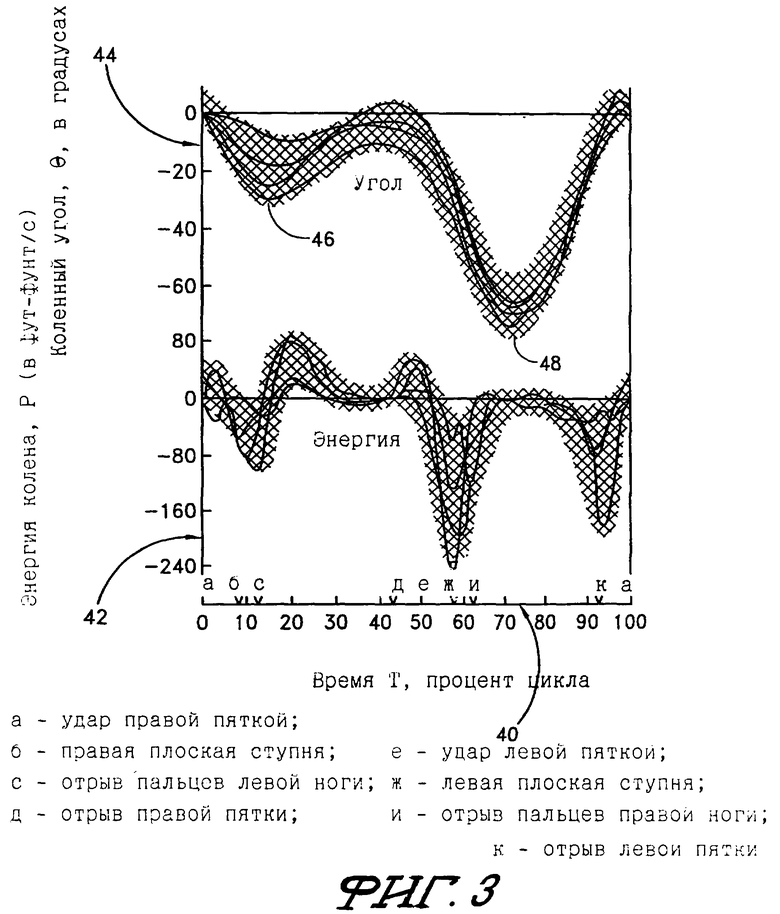
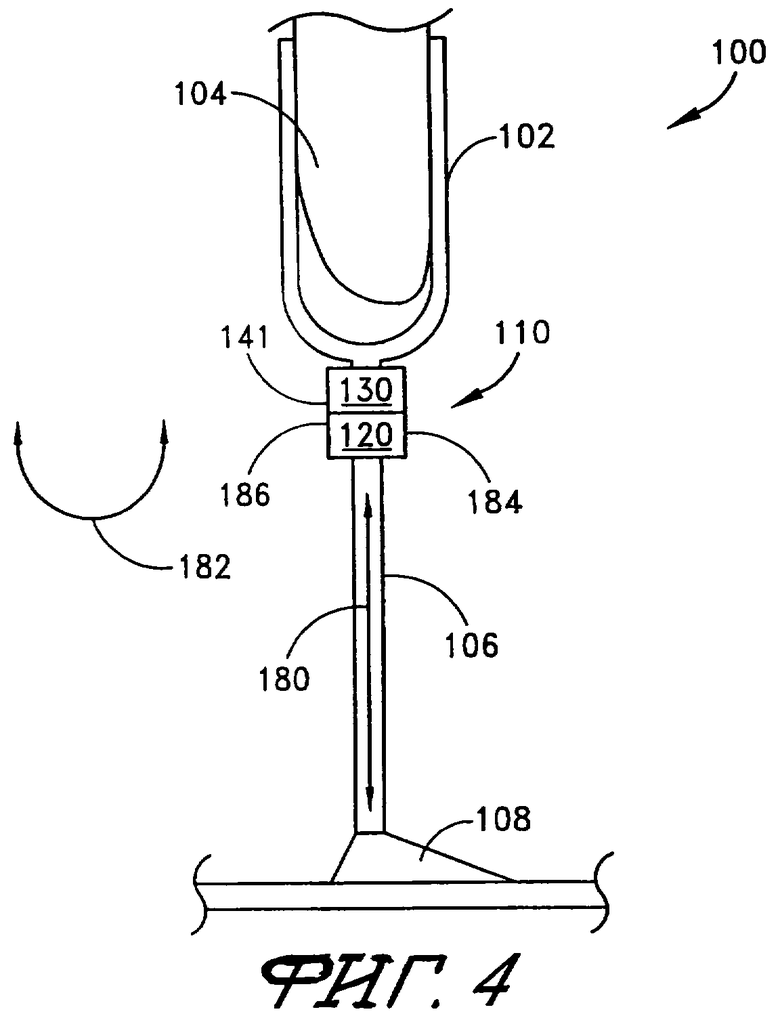

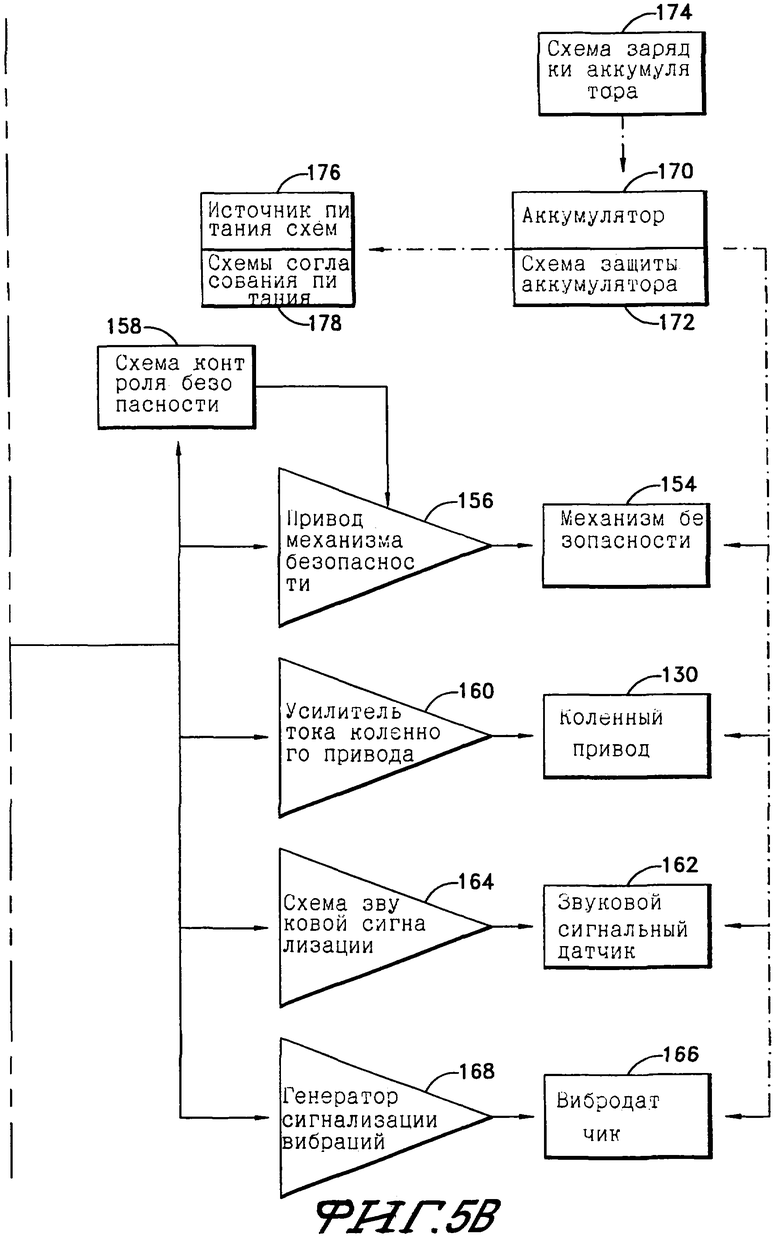
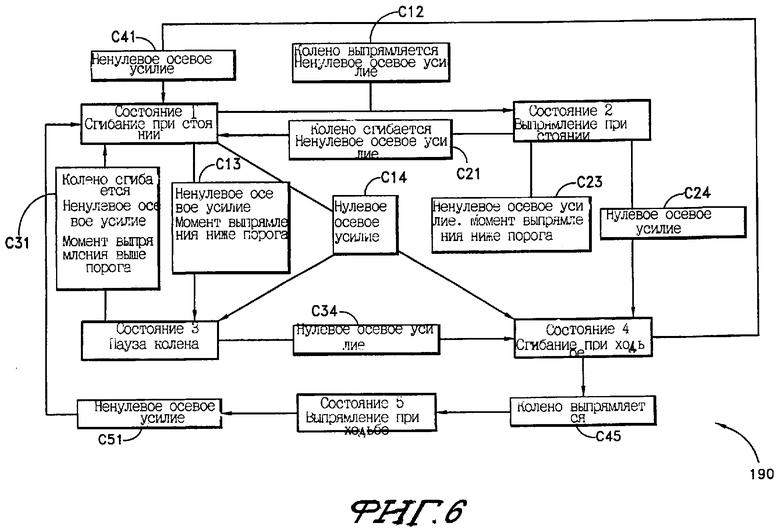
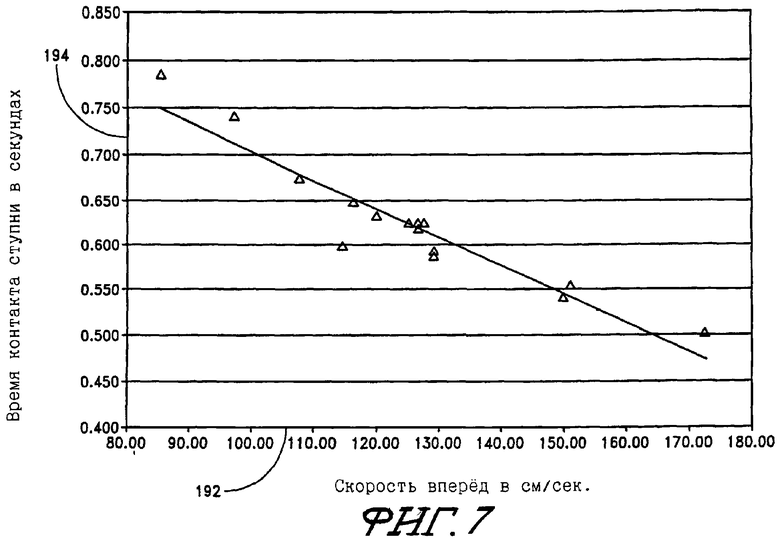
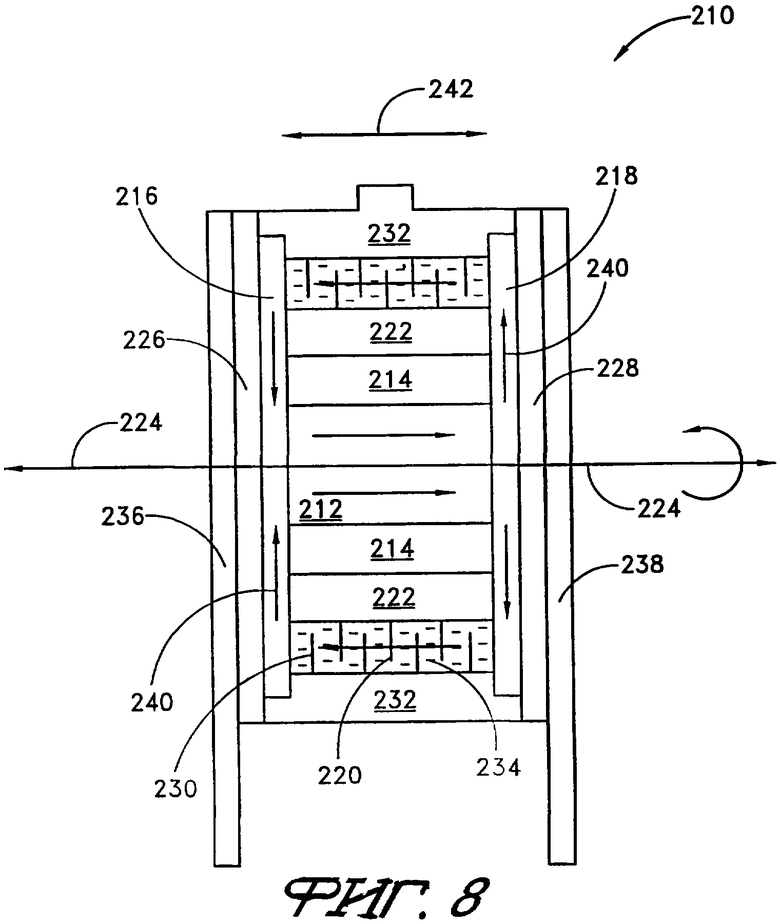
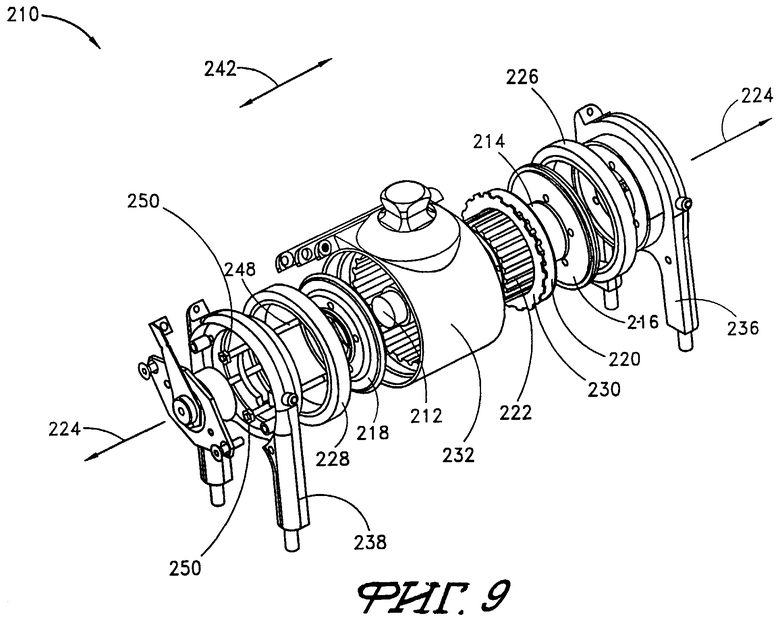
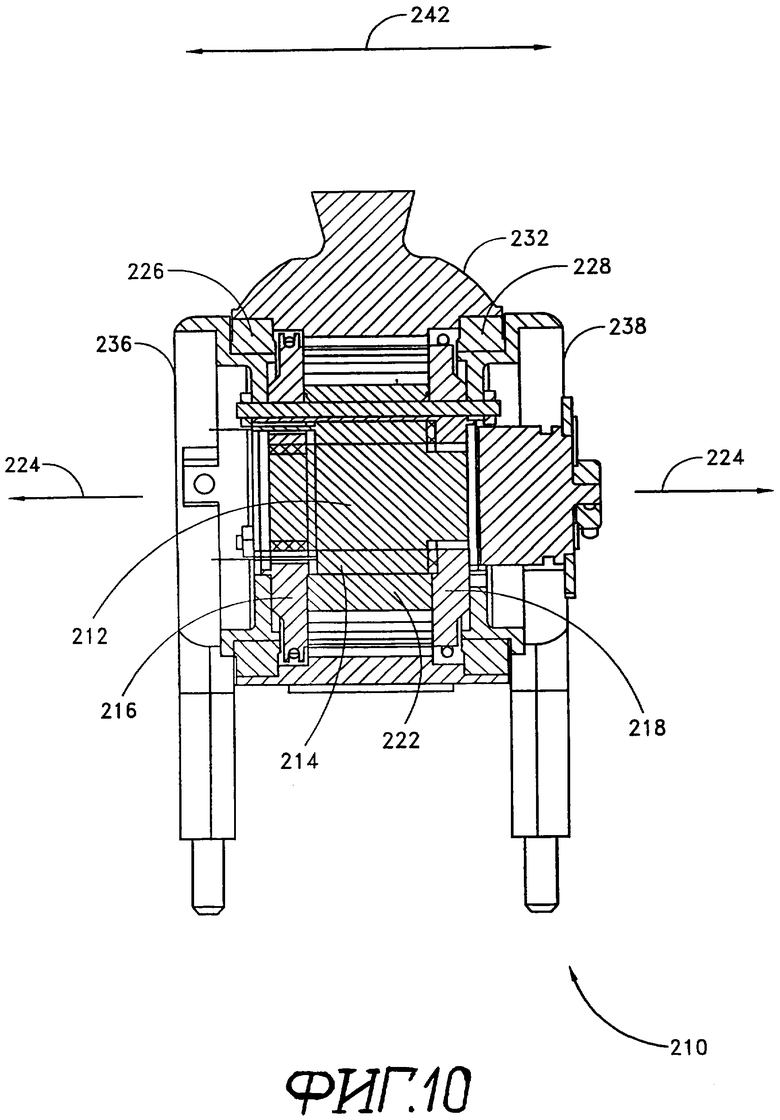
Изобретение относится к медицинской технике. При адаптивном управлении амортизацией протезного колена в фазе стояния измеряют мгновенные значения осевого усилия, момента и коленного угла протезного колена. Осуществляют автоматическую регулировку амортизации на основе мгновенной информации датчиков и соотношений между данными датчиков и амортизацией в фазе стояния, установленной в клинических исследованиях людей без ноги с различными размерами тела, хранимых в памяти. При адаптивном управлении амортизацией протезного колена в фазе ходьбы непрерывно измеряют время контакта с землей протезной ступни по периодам одного цикла походки. Хранят время контакта в памяти во временных окнах, соответствующих двигательной скорости пациента. Осуществляют итеративное модулирование амортизации в фазе ходьбы для выпрямления колена скоростью передвижения пациента. Используют значения амортизации для автоматического управления амортизацией в фазе ходьбы при всех двигательных скоростях. Протезное колено содержит коленный привод, датчики для измерения усилия и момента, приложенных к протезному колену, контроллер, имеющий память и выполненный с возможностью посылки командных сигналов на коленный привод и принятия входных сигналов от датчиков. Коленный привод представляет собой магнитореологический тормоз, работающий в режиме сдвига. Протезный узел содержит протезное колено, углубление для культи, протезную голенную часть и протезную ступню, находящиеся в механической связи. Изобретение позволяет обеспечить точное и аккуратное управление протезным коленом практически при всех двигательных скоростях и практически для всех пациентов. 6 н. и 28 з.п. ф-лы, 2 табл., 10 ил.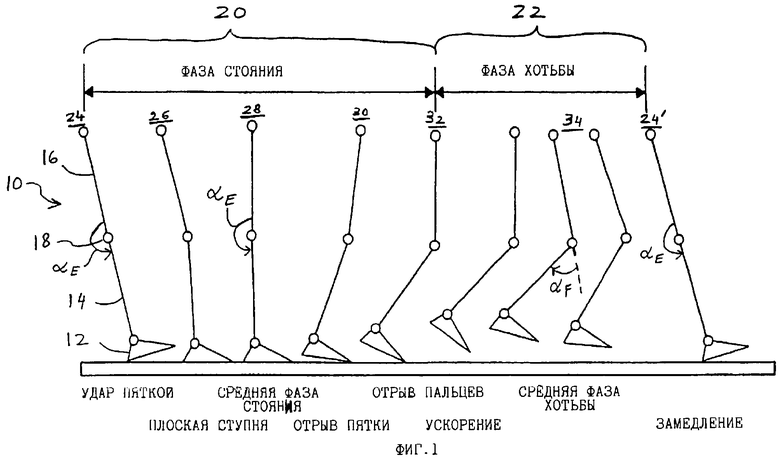
| US 5571205 А, 05.11.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВЕГЕТАРИАНСКОЙ КОЛБАСЫ | 2006 |
|
RU2328160C1 |
| US 5888212 A, 30.03.1999 | |||
| Устройство для защиты трехфазной электроустановки от ненормальных режимов работы | 1975 |
|
SU549855A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕННЫМ СОЧЛЕНЕНИЕМ ПРОТЕЗА НОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2089138C1 |

