ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Отсутствует.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Раньше нефтегазовый промысел осуществляли, главным образом, на месторождениях углеводородов, являющихся «вторичными» залежами, то есть нефть и газ добывали из пористых подземных пластов, в которые углеводороды мигрировали из других мест. Вследствие пористости пластов, в которых накапливались углеводороды, основной задачей бурения было только расположение скважины в подходящем месте в пористом подземном пласте. Когда промысловый инженер или оператор буровой установки при планировании и/или бурении принимал во внимание положение других скважин, учитывалось только то, что траектории двух скважин не должны пересекаться друг с другом.
[0003] С недавних пор при добыче углеводородов стали разрабатывать месторождения, являющиеся «первичными» залежами, их иногда называют сланцевыми залежами или просто сланцами. Сланцы считаются первичными залежами, так как представляют собой физическое место залегания органических веществ, в далеком прошлом превратившихся в углеводороды под действием высокого давления и высокой температуры. Превращение органического вещества в углеводороды сопровождалось расширением, в результате которого образовавшиеся нефть и газ вытеснялись в другие места, ставшие «вторичными» залежами углеводородов. Тем не менее, в сланцах все еще содержится значительное остаточное количество углеводородов.
[0004] В отличие от пористых «вторичных» залежей углеводородов сланцы характеризуются очень низкой проницаемостью. Другими словами, даже при значительной удельной объемной пористости сланца способность углеводородов просачиваться через пористые пространства со временем снижается. Отчасти вследствие низкой проницаемости сланцев для достижения необходимого дренирования может требоваться большее количество скважин, пробуриваемых в конкретном сланцевом пласте, чем потребовалось бы для высокопроницаемой «вторичной» залежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Ниже дано описание приведенных для примера вариантов осуществления изобретения со ссылками на соответствующие чертежи.
[0006] На фиг. 1 показан в аксонометрии вид промыслового участка месторождения углеводородов согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
[0007] На фиг. 2 показана буровая система согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
[0008] На фиг. 3 показан в аксонометрии вид ствола скважины, включая поверхность неопределенности согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
[0009] На фиг. 4 показан в аксонометрии вид ствола скважины, включая поверхность неопределенности, с учетом диаметра разрыва согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
[0010] На фиг. 5 показана ситуация бурения согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
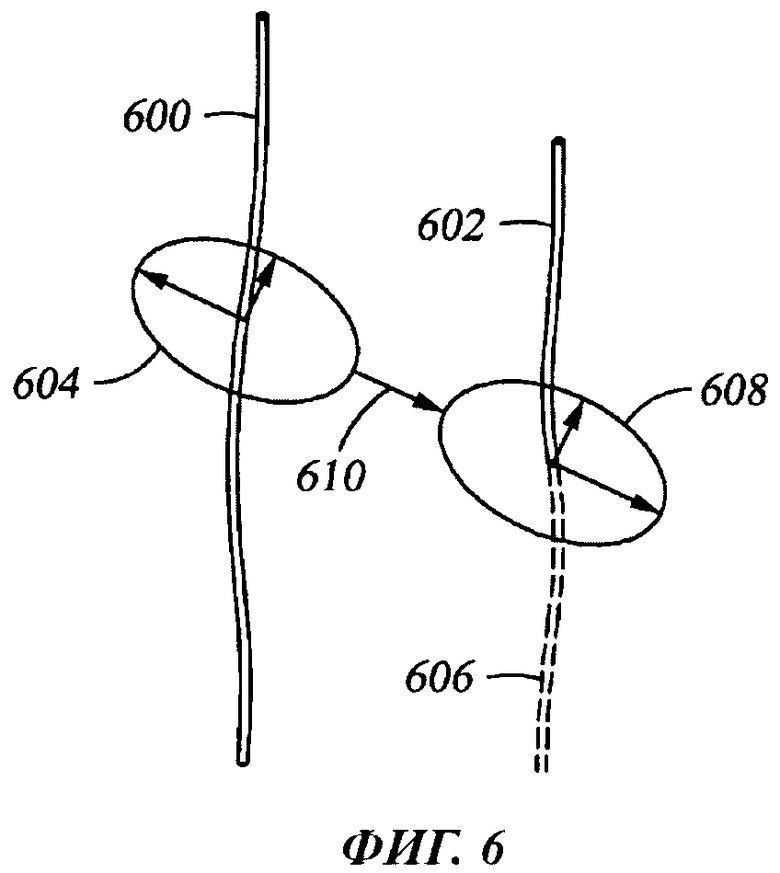
[0011] На фиг. 6 показан в аксонометрии вид траекторий двух стволов скважин согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
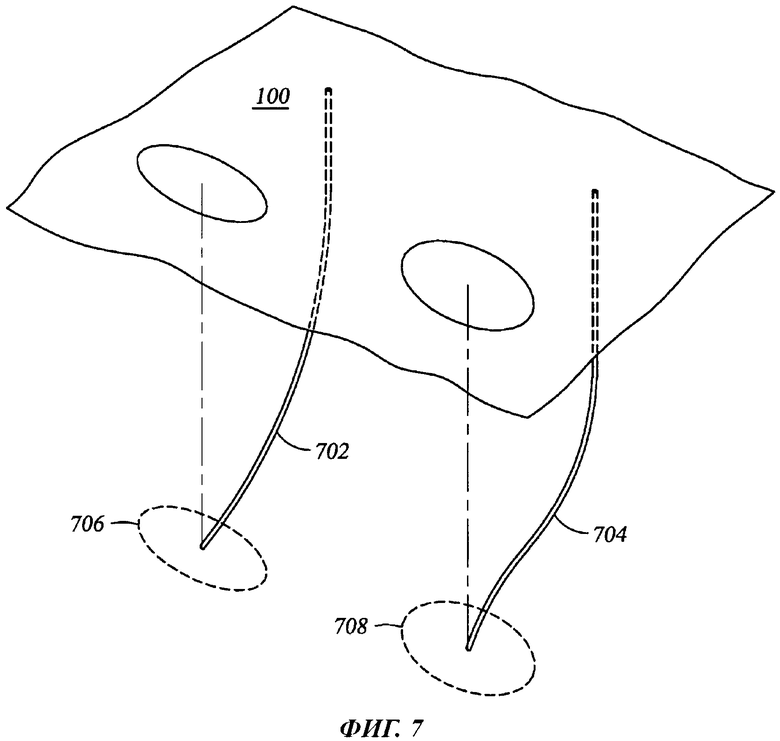
[0012] На фиг. 7 показан в аксонометрии вид ситуации бурения с проекциями частей поверхности неопределенности для каждого ствола скважины согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
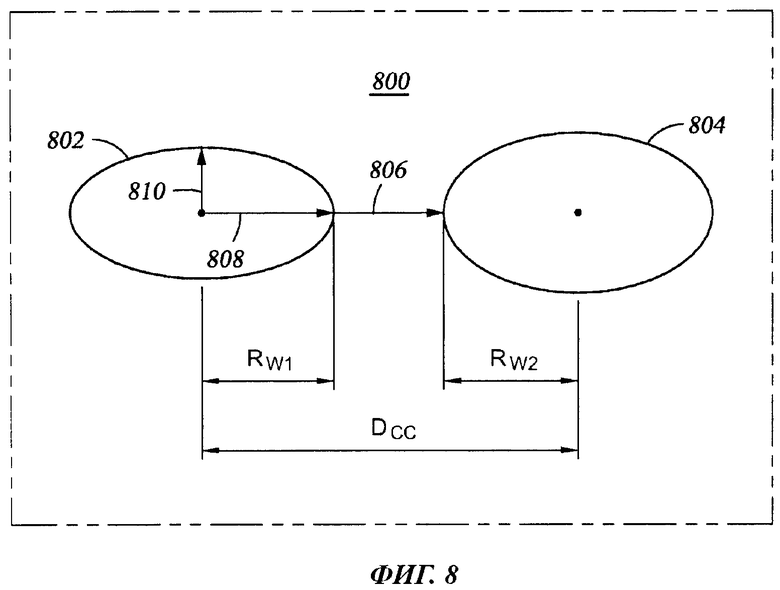
[0013] На фиг. 8 показан вид сверху поверхности, на которую сделаны проекции согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
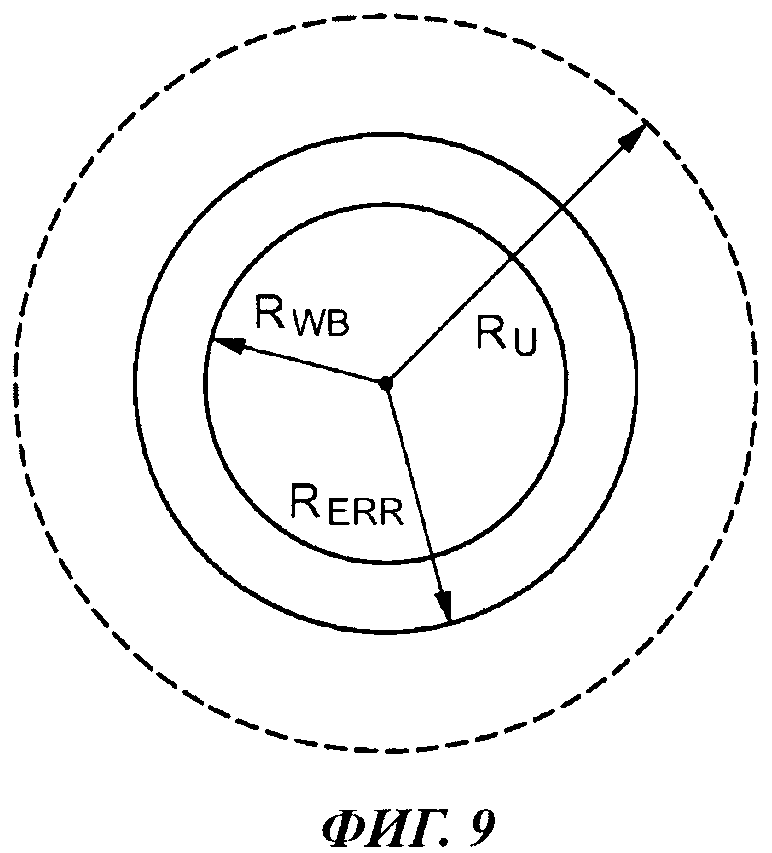
[0014] На фиг. 9 проиллюстрировано определение радиуса ошибки согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
[0015] На фиг. 10 проиллюстрировано определение радиуса ошибки согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
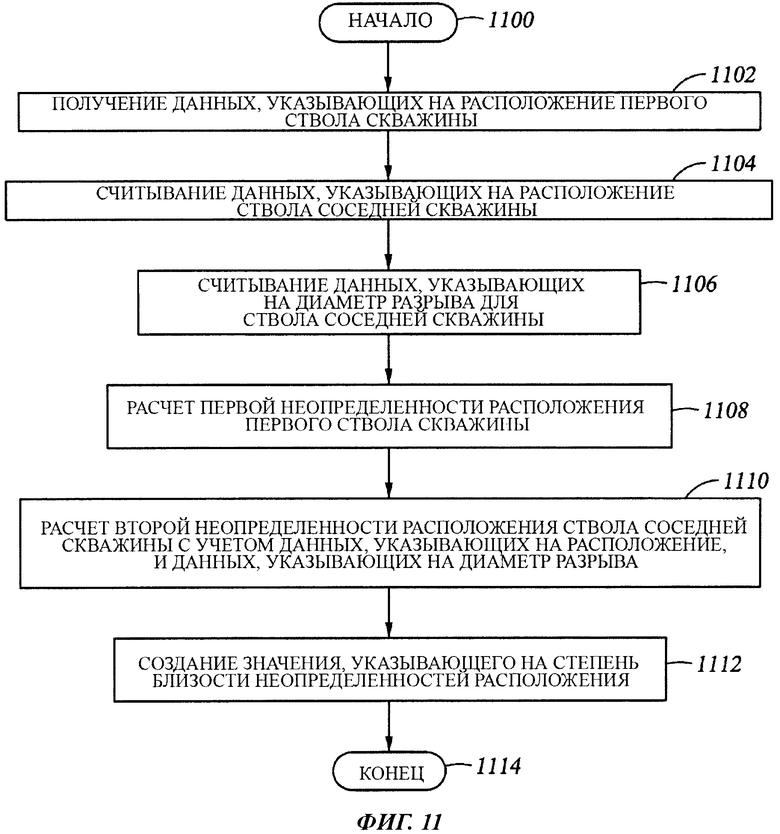
[0016] На фиг. 11 показан способ согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
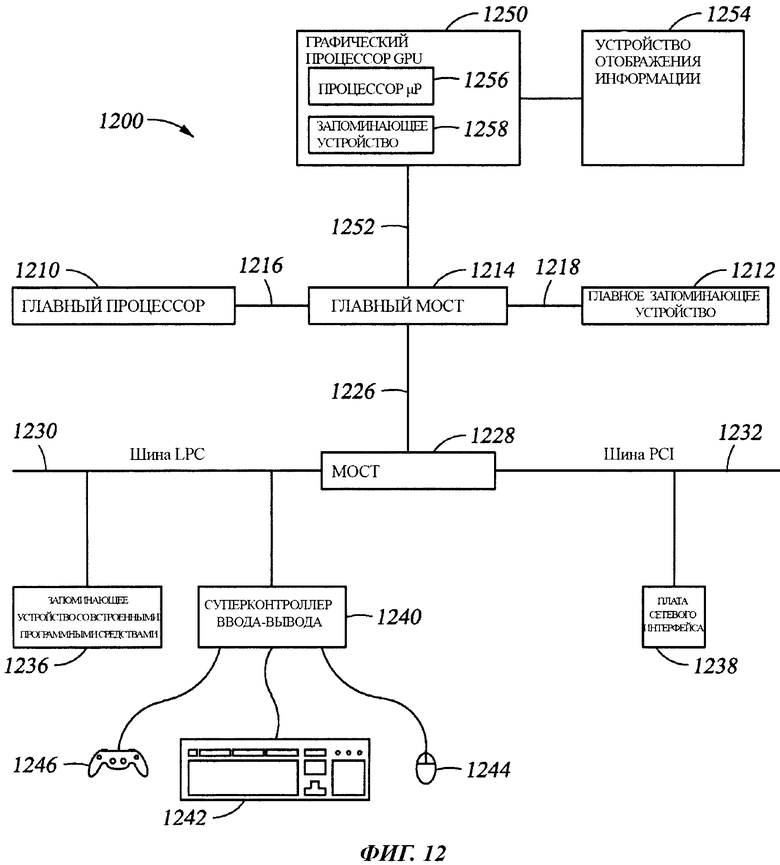
[0017] На фиг. 12 показана компьютерная система согласно, по меньшей мере, некоторым вариантам осуществления изобретения.
ТЕРМИНЫ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
[0018] В описании и формуле настоящего изобретения для обозначения определенных компонентов использован ряд терминов. Специалисту понятно, что различные компании могут называть одни и те же компоненты по-разному. В данном документе не проводится различий между компонентами, имеющими одинаковые функции, но отличающимися по названию.
[0019] В нижеприведенном описании и в формуле изобретения слова «включает», «содержит», «имеет» используются в неограничивающем смысле, то есть могут трактоваться как «включает в себя, но не ограничивается этим». Кроме того, слово «соединяется» подразумевает как прямую, так и опосредованную связь между элементами. Таким образом, если первое устройство соединено со вторым устройством, значит, эти устройства могут быть связаны друг с другом как напрямую, так и опосредованно через другие устройства и соединители.
[0020] «Диаметр разрыва» обозначает фактическое или прогнозируемое расстояние, на которое распространяются отходящие от ствола скважины трещины, образовавшиеся при гидроразрыве. Использование термина «диаметр разрыва» не обязательно подразумевает, что трещины, образовавшиеся при гидроразрыве, равномерно расходятся во всех направлениях, напротив, во многих случаях трещины проходят на большее расстояние вдоль плоскости напластования, нежели в перпендикулярном ей направлении.
[0021] «Реальное время» в связи с действием, предпринятым в отношении бурения скважины, обозначает, что действие происходит в пределах двух часов с момента наступления вызвавшего его события, и это действие выполняется быстрее, чем оно могло бы быть выполнено человеком, использующим только карандаш и бумагу.
ПОДРОБНОЕ РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0022] Нижеприведенное описание относится к различным вариантам осуществления настоящего изобретения. Несмотря на то, что некоторые варианты осуществления изобретения могут быть предпочтительными, описанные варианты осуществления изобретения не подразумевают ограничения сути изобретения, в том числе его формулы, и не могут использоваться с такого рода ограничениями. Кроме того, специалисту понятно, что нижеприведенное описание имеет широкую область применения, и описание какого-либо из вариантов осуществления настоящего изобретения носит исключительно пояснительный характер и не ограничивает суть изобретения, в том числе его формулу.
[0023] Расстояние между стволами скважин в сланцах значительно выше, чем в пластах, являющихся вторичными залежами. Кроме того, для добычи углеводородов из сланцевой породы в промышленных масштабах некоторые участки сланцевого пласта, через который проходят все стволы скважин, а зачастую и всю такую сланцевую формацию подвергают гидроразрыву. Трещины, образовавшиеся при гидроразрыве, проходят на некоторое расстояние от ствола скважины, причем это расстояние зависит от множества факторов (например, хрупкости сланцевой породы, давления гидроразрыва, продолжительности действия давления на сланцевую породу).
[0024] С целью уменьшения вероятности прямого пересечения двух стволов скважин (например, «ствол в ствол») или их косвенного пересечения можно использовать различные варианты осуществления изобретения для планирования траекторий стволов скважин и/или бурения стволов скважин с учетом не только фактических или запланированных траекторий стволов окружающих скважин, но и неопределенностей положения стволов скважин и других параметров (например, диаметров разрыва стволов соседних скважин). Косвенное пересечение может происходить, например, при бурении первого ствола скважины сквозь диаметр разрыва второго ствола скважины; при распространении гидроразрыва первого ствола скважины на второй ствол скважины или даже при распространении гидроразрыва первого ствола скважины на гидроразрыв второго ствола скважины.
[0025] Применительно к сланцевым пластам были разработаны различные раскрытые ниже варианты осуществления изобретения, позволяющие предотвратить прямые и/или косвенные пересечения. Однако эти варианты осуществления изобретения также применимы к планированию и/или проводке стволов скважин с учетом любых параметров подземных объектов (например, планированию и/или проводке стволов скважин для достижения требуемой температуры в стволе скважины; планированию и/или проводке стволов скважин для достижения требуемого объема пластовых флюидов в стволе скважины; планированию и/или проводке стволов скважин в зависимости от реакции на изменение пластового давления пласта, в котором бурят скважину; планированию и/или проводке стволов скважин для обхода геологических разрывов). Ниже описан пример системы и изложены аспекты планирования траекторий и бурения стволов скважин.
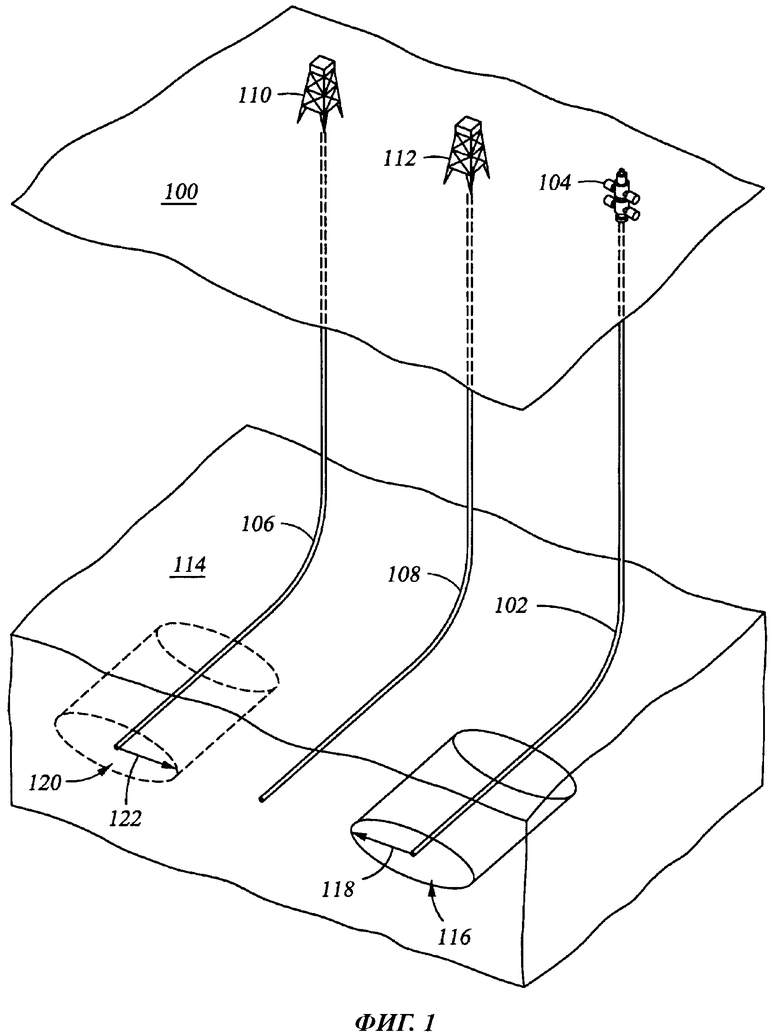
[0026] На фиг. 1 показан в аксонометрии частичный разрез, по меньшей мере, участка месторождения углеводородов. В частности, на фиг. 1 показана земная поверхность 100, от которой, в данном иллюстративном случае, пробурены три скважины. Части стволов скважин, скрытые земной поверхностью, обозначены пунктирными линиями. Ствол 102 скважины связан с клапанным блоком 104, расположенным на поверхности, и относится к скважине, пробуренной и законченной ранее. Стволы 106 и 108 скважин связаны с вышками 110 и 112, соответственно, и относятся к пробуриваемым и/или заканчиваемым скважинам. Каждый из стволов 102, 106, 108 скважин пробурен или пробуривается в пласте 114, таком как сланцевый пласт, однако различные варианты осуществления изобретения не ограничиваются применением только лишь для сланцевых пластов. Покрывающие породы, находящиеся между пластом 114 и земной поверхностью 100, не показаны, чтобы не перегружать чертеж.
[0027] Изображенный для примера ствол 102 скважины имеет соответствующий диаметр 116 разрыва, который покрывает некоторое радиальное расстояние 118 от ствола скважины. В некоторых случаях трещины могут отходить от ствола скважины равномерно во всех направлениях, но как показано применительно к стволу 102 скважины, во многих случаях трещины могут проходить на большее расстояние в одном направлении (в горизонтальном, см. чертеж) и на меньшее расстояние в перпендикулярном ему направлении (в вертикальном, см. чертеж).
[0028] Предположим, применительно к данному описанию, что бурение ствола 106 скважины уже завершено, и планируется осуществить гидроразрыв. Однако ствол 106 скважины может быть связан с планируемым диаметром 120 разрыва (показан пунктирной линией), и его заканчивание может планироваться одновременно с бурением ствола 108 скважины. Во многом аналогично тому, как диаметр 116 разрыва проходит на фактическом расстоянии 118 от ствола 102 скважины, планируемый диаметр 120 разрыва может иметь ожидаемое радиальное расстояние 122, на которое, как ожидается, от ствола 106 скважины будут отходить трещины диаметра 120 разрыва.
[0029] Согласно, по меньшей мере, некоторым вариантам осуществления изобретения при планировании траектории приведенного для примера ствола 108 скважины можно учитывать фактические траектории стволов расположенных рядом скважин (иногда называемых соседними скважинами), таких как законченные скважины (например, ствол 102) и другие скважины, находящиеся на различных стадиях строительства (например, ствол 106). Кроме того, помимо учета траектории стволов соседних скважин при планировании можно принимать во внимание другие параметры, связанные с соседними скважинами, такие как фактический диаметр разрыва (например, диаметр 116), планируемые диаметры разрыва (например, диаметр 120 разрыва) и неопределенности положения, связанные с каждой соседней скважиной (подробнее рассмотрены ниже).
[0030] В других вариантах осуществления изобретения, при бурении приведенного для примера ствола 108 скважины траекторию можно изменять и/или корректировать, учитывая фактические траектории стволов соседних скважин, а также другие параметры, связанные с соседними скважинами, такие как фактический диаметр разрыва, планируемый диаметр разрыва и неопределенность положения, связанные с каждым соседним стволом скважины. Ниже раскрывается пример системы, используемой при бурении приведенных для примера стволов скважин, таких как используются при бурении ствола 108 скважины.
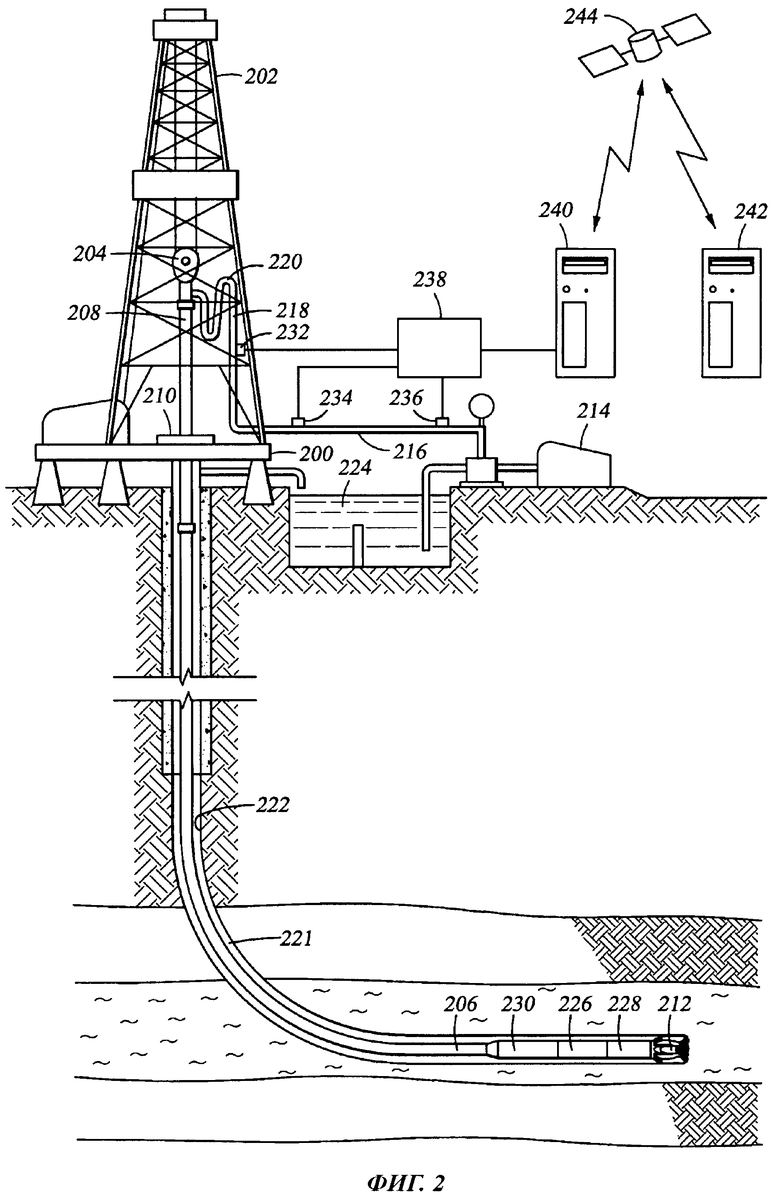
[0031] На фиг. 2 показан процесс бурения согласно, по меньшей мере, некоторым вариантами осуществления изобретения. В частности, на фиг. 2 показана буровая платформа 200, оборудованная вышкой 202, несущей спускоподъемное устройство 204. Бурение согласно, по меньшей мере, некоторым вариантам осуществления изобретения производят посредством колонны бурильных труб, соединенных друг с другом сочленяющими «инструментами» в бурильную колонну 206. К спускоподъемному устройству 204 подвешен верхний привод 208, используемый для вращения бурильной колонны 206 и спуска ее в скважину через устьевое оборудование 210. К нижнему концу бурильной колонны 206 присоединено буровое долото 212. Бурение породы осуществляется буровым долотом 212, вращаемым посредством бурильной колонны 206; посредством гидравлического забойного двигателя, находящегося вблизи бурового долота 212 и передающего крутящий момент на буровое долото 212; или посредством обоих указанных средств. Буровой раствор нагнетают буровым насосом 214 через проточную линию 216, нагнетательную трубу 218, изогнутую часть 220 ведущей бурильной трубы, верхний привод 208 и далее вниз через бурильную колонну 206 под высоким давлением с большим расходом потока, в результате чего буровой раствор выходит через патрубки или сопла бурового долота 212. Затем буровой раствор перемещается вверх по стволу скважины через кольцевое пространство 221, образованное между наружной поверхностью бурильной колонны 206 и стенкой 222 ствола скважины, протекает через превентор (не показан на чертеже) и поступает в резервуар 224 для бурового раствора, находящийся на поверхности, где буровой раствор очищают и затем посредством бурового насоса 214 снова нагнетают в контур циркуляции. Буровой раствор используют для охлаждения бурового долота 212, для отвода отходов, образующихся в области контакта режущего инструмента с забоем, и для выравнивания гидростатического давления в пластах.
[0032] Согласно различным вариантами осуществления изобретения бурильная колонна 206 может содержать прибор 226 для каротажа в процессе бурения (LWD, от англ. logging-while-drilling) и прибор 228 для инклинометрии в процессе бурения (MWD, от англ. measuring-while-drilling). Для специалистов, работающих в соответствующей сфере промышленности, разница в назначении приборов для каротажа в процессе бурения и приборов для инклинометрии в процессе бурения зачастую неочевидна. Чтобы внести ясность в эти термины в рамках описания и формулы настоящего изобретения, необходимо отметить, что посредством приборов для каротажа в процессе бурения получают информацию о свойствах окружающего скважину пласта (например, пористости, проницаемости), а посредством приборов для инклинометрии в процессе бурения получают информацию о характеристиках скважины (например, угле наклона и направлении). Приборы 226 и 228 можно соединить с телеметрическим модулем 230, передающим данные на поверхность. В некоторых вариантах осуществления изобретения телеметрический модуль передает данные на поверхность электромагнитными средствами. В других случаях телеметрический модуль 230 передает данные на поверхность по электрическим или оптическим проводникам, встроенным в трубы, составляющие бурильную колонну 206. В прочих случаях посредством телеметрического модуля 230 модулируют сопротивление потоку бурового раствора в бурильной колонне, и создают импульсы давления, распространяющиеся со скоростью звука через столб бурового раствора и передаваемые таким образом на поверхность.
[0033] На фиг. 2 также показана приведенная для примера система кодирования данных, передаваемых в виде импульсов давления на поверхность. В этой системе импульсный сигнал давления посредством одного или нескольких преобразователей, например преобразователей 232, 234 и/или 236, преобразуют в электрические сигналы, поступающие в оцифровывающее устройство 238 (например, аналого-цифровой преобразователь). На чертеже показаны три преобразователя 232, 234 и/или 236, однако при необходимости можно использовать большее или меньшее количество таких преобразователей. Оцифровывающее устройство 238 передает оцифрованные сигналы давления в компьютер 240 или в какое-либо иное устройство, предназначенное для обработки данных. Компьютер 240 на основе программных средств (которые могут храниться на машиночитаемом носителе информации) обрабатывает и декодирует полученные сигналы.
[0034] Согласно, по меньшей мере, некоторым вариантам осуществления изобретения, по меньшей мере, часть телеметрических данных, передаваемых на поверхность телеметрическим модулем 230, представляет собой данные о положении, полученные посредством прибора 228 для инклинометрии в процессе бурения (MWD). Эти телеметрические данные далее могут анализироваться и обрабатываться компьютером 240 (напрямую или в качестве вспомогательной информации для оператора буровой установки) с целью изменения и/или корректировки направления бурения. В частности, на основании данных о положении компьютерная система 240 может обновлять или оценивать траекторию создаваемого ствола скважины, может анализировать траекторию этого ствола применительно к данным, касающимся одной или нескольких соседних скважин, и затем указывать на изменение направления ствола скважины для предотвращения прямого или косвенного пересечения этого ствола со стволом соседней скважины.
[0035] В других приведенных для примера вариантах осуществления изобретения наземный компьютер 240 может собирать данные о положении, поступающие от прибора 228 для инклинометрии в процессе бурения (MWD), и затем передавать эти данные в другую компьютерную систему 242, такую как домашняя или офисная компьютерная система компании промыслового обслуживания. На основании данных о положении компьютерная система 242 может обновлять или оценивать траекторию создаваемого ствола скважины, может анализировать траекторию этого ствола применительно к данным, касающимся одной или нескольких соседних скважин, и затем указывать на изменение направления ствола скважины для предотвращения прямого или косвенного пересечения со стволом соседней скважины с передачей информации об этом изменении курса в компьютерную систему 240. Передача данных между компьютерной системой 240 и компьютерной системой 242 может иметь любую подходящую форму, например, эту передачу данных можно осуществлять через Интернет, локальную или глобальную вычислительную сеть или, как показано на чертеже, по спутниковому каналу 244. Обратимся далее к неопределенностям положения.
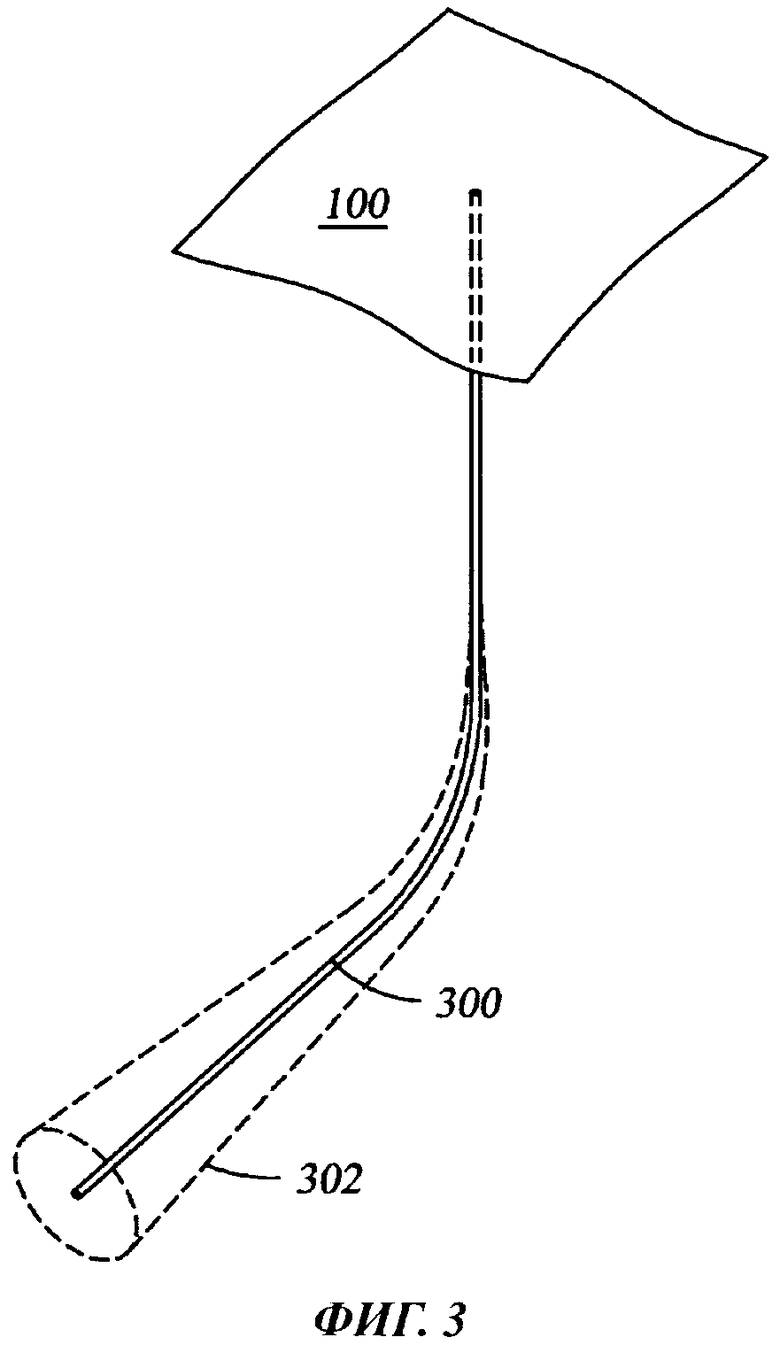
[0036] Во многих случаях глубина ствола скважины под земной поверхностью в самой глубокой точке может составлять 5000 футов и более, а его горизонтальная протяженность может составлять 10000-15000 футов от места нахождения устья у земной поверхности. Несмотря на значительные успехи в развитии технологии расчета и/или определения положения ствола скважины, в отношении точного местоположения ствола скважины в трехмерном пространстве все равно имеется неопределенность. В некоторых случаях эта неопределенность может возрастать с увеличением длины ствола скважины. На фиг. 3 показан в аксонометрии вид ствола 300 скважины, проходящего от земной поверхности 100 в подземный пласт. На фиг. 3 подземный пласт не показан, чтобы не перегружать чертеж. Часть ствола 300 скважины, заслоненная земной поверхностью 100, обозначена пунктирными линиями. С увеличением расстояния ствола скважины от его устья неопределенность положения возрастает. В частности, неопределенность положения на фиг. 3 показана в виде поверхности 302 неопределенности, обозначенной пунктирными линиями. По мере увеличения длины ствола 300 скважины поверхность 302 неопределенности расширяется. Поверхностью неопределенности характеризуются не только стволы законченных скважин, но и стволы скважин, находящиеся в процессе бурения. Кроме того, неопределенность существует и в отношении длины ствола скважины, и, следовательно, поверхность 302 неопределенности, показанная на фиг. 3, может фактически принимать форму «отрывающейся капли», охватывающей дальний конец ствола скважины (форма «отрывающейся капли» не показана, чтобы не перегружать чертеж). Таким образом, для предотвращения пересечения или пересечения двух стволов скважин при бурении согласно, по меньшей мере, некоторым вариантам осуществления изобретения учитывают неопределенность положения пробуриваемого ствола скважины, а также неопределенность положения соседних скважин.
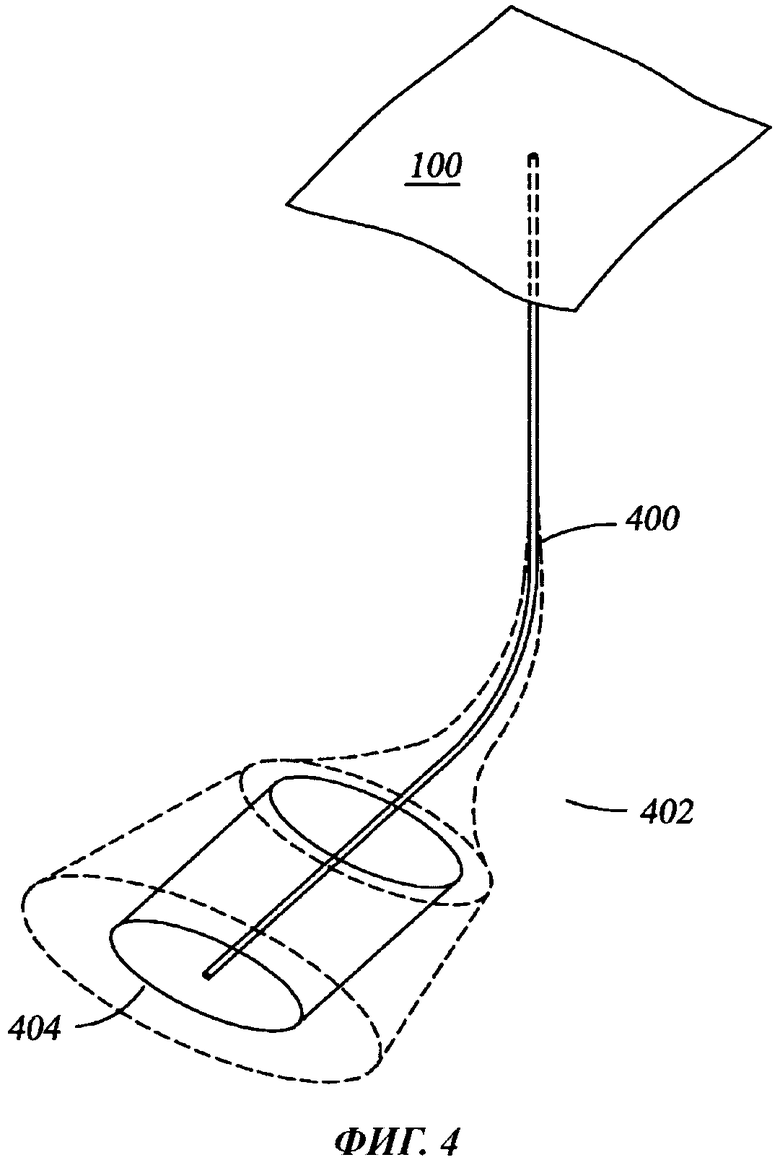
[0037] На фиг. 4 показан в аксонометрии вид ствола 400 скважины, проходящего от земной поверхности 100 в подземный пласт. На фиг. 4 подземный пласт не показан, чтобы не перегружать чертеж. Часть ствола 400 скважины, скрытая земной поверхностью 100, обозначена пунктирными линиями. Как и в случае со стволом 300 скважины, показанном на фиг. 3, с увеличением расстояния ствола 400 скважины от устья неопределенность положения возрастает. Неопределенность положения ствола 400 скважины показана в виде поверхности 402 неопределенности, обозначенной пунктирными линиями. Предположим, применительно к данному описанию, что гидроразрыв был осуществлен на дальнем конце ствола 100 скважины, в результате чего имеется диаметр 404 разрыва. По мере увеличения длины ствола 400 скважины, поверхность 402 неопределенности расширяется и охватывает диаметр 404 разрыва. Таким образом, для предотвращения пересечения или пересечения двух стволов скважин при бурении согласно, по меньшей мере, некоторым вариантам осуществления изобретения учитывают неопределенность положения пробуриваемого ствола скважины, а также неопределенность положения соседних скважин, в том числе неопределенность положения диаметров разрыва.
[0038] На фиг. 5 показан в аксонометрии вид стволов скважин, проходящих от земной поверхности 100 в подземный пласт. На фиг. 5 подземный пласт не показан, чтобы не перегружать чертеж. Части стволов 400 скважин, скрытые земной поверхностью 100, обозначены пунктирными линиями. В частности, ствол 500 скважины, показанный на фиг. 5, закончен, и через него осуществлен гидроразрыв. Таким образом, ствол 500 скважины имеет поверхность 502 неопределенности. Ствол 504 скважины находится в процессе бурения и в нем планируется осуществить гидроразрыв. Ствол 504 скважины имеет поверхность 506 неопределенности. Ствол 508 скважины, также находящийся в процессе бурения, имеет поверхность 510 неопределенности и прогнозируемую траекторию 512 (эти поверхность и траектория обозначены пунктирными линиями). Таким образом, поскольку ствол 508 скважины находится в процессе бурения, приведенные для примера системы осуществляют непрерывное наблюдение не только за положением ствола 508 скважины (например, посредством прибора 228 для инклинометрии в процессе бурения (MWD)), но и за другими данными, такими как относительное положение и неопределенность положения ствола соседней скважины; положение и неопределенность положения ствола 504 соседней скважины; прогнозируемый диаметр разрыва ствола 504 соседней скважины вместе с соответствующей неопределенностью диаметра разрыва. Согласно, по меньшей мере, некоторым вариантам осуществления изобретения в реальном времени при бурении ствола 508 скважины его направляют (с учетом различных данных) так, чтобы предотвратить прямое или косвенное пересечение со стволами скважин. Другими словами, согласно, по меньшей мере, некоторым вариантам осуществления изобретения, при бурении ствола 508 скважины в реальном времени направление бурения изменяют так, чтобы наружная граница поверхности 510 неопределенности не пересекалась с наружной границей поверхностей 502 и/или 506 неопределенности стволов 500 и 504 соседних скважин, соответственно.
[0039] В других вариантах осуществления изобретения при изменении направления бурения ствола 508 скважины также можно учесть прогнозируемый диаметр разрыва для ствола 508 (аналогично прогнозируемому диаметру разрыва ствола 504 скважины, прогнозируемый диаметр разрыва косвенно характеризуется размером поверхности 506 неопределенности).
[0040] Согласно, по меньшей мере, некоторым вариантам осуществления изобретения выполняющая команды компьютерная система (например, компьютерная система 240 или компьютерная система 242), может не только предоставлять данные об изменениях направления для предотвращения пересечения с другими стволами скважин, как описано выше, но и создавать визуализированное представление (например, посредством отображающего устройства) физических взаимосвязей стволов скважин и неопределенности положения, обозначаемой поверхностями неопределенности. В некоторых случаях визуализированное представление может являться проекцией на двухмерный экран трехмерных взаимосвязей, однако в других случаях также можно использовать отображающие устройства, обеспечивающие проецирование в трех измерениях (с помощью оптических средств или без них). Визуализированное представление может содержать не только изображение траектории каждого ствола скважины, но и отображение неопределенности положения, показанной поверхностями неопределенности.
[0041] Дополнительно к предоставлению данных об изменениях направления или вместо них, инструкции, выполняемые одной или более соответствующими компьютерными системами, могут также генерировать показатель близости между пробуриваемым стволом скважины и соседним стволом скважины (находящейся на любой стадии заканчивания). В случае нахождения в непосредственной близости сразу нескольких соседних скважин показатель близости можно рассчитать для каждой соседней скважины. Каждый показатель близости можно рассчитывать множеством способов. Ниже приведен пример методики расчета показателя близости. Применительно к данному описанию методики расчета показателей близости разделены на две категории: методики трехмерной визуализации и методики проецирования на плоскость. В первую очередь ниже рассмотрены методики трехмерной визуализации.
[0042] На фиг. 6 показан в аксонометрии вид двух стволов 600 и 602 скважин с произвольными траекториями. Ствол 600 скважины имеет большую протяженность, нежели ствол 602 скважины, а горизонтальный срез поверхности неопределенности ствола 600 скважины в точке максимального близости стволов скважин имеет форму эллипса 604. Положим, для пояснения, что ствол 602 скважины бурят вблизи ствола 600, при этом ствол 602 имеет планируемую траекторию 606 за своим дальним концом и горизонтальным срезом поверхности неопределенности в форме эллипса 608 на своем дальнем конце.
[0043] В некоторых вариантах осуществления изобретения показатель близости представляет собой физическое расстояние между эллипсом 604 и эллипсом 608, обозначенное вектором 610. Таким образом, показатель близости в этом приведенном для примера варианте осуществления изобретения является длиной вектора 610. В других случаях в показателе близости учитывают расстояние между центрами стволов 600 и 602 скважин, а также радиус каждой поверхности неопределенности (показанной в каждом случае в виде эллипса). В частности, согласно, по меньшей мере, некоторым вариантам осуществления изобретения показатель близости можно рассчитать по формуле

где VP - показатель близости; DCC - расстояние между центрами двух стволов скважин; RW1 - радиус поверхности неопределенности первого ствола скважины; RW2 - радиус поверхности неопределенности второго ствола скважины. В некоторых случаях расстояние между центрами стволов скважин измеряют от дальнего конца пробуриваемой скважины до ближайшей части ствола соседней скважины. Кроме того, в тех случаях, когда поверхность неопределенности имеет эллиптическое сечение (например, когда она связана с диаметром разрыва в сланцевом пласте, характеризующемся хрупкостью с выраженной направленностью), в качестве RW можно выбрать большую ось или малую ось конкретного эллиптического сечения. Таким образом, для расчета показателей близости с большим запасом для каждой поверхности неопределенности можно использовать большую ось, а для расчета показателей близости ствола соседней скважины, с меньшим запасом для каждой поверхности неопределенности можно использовать малую ось. В других случаях можно использовать большую ось одной поверхности неопределенности и малую ось другой поверхности неопределенности.
[0044] В результате расчета показателя близости по приведенной для примера формуле (1) получают численное значение, которое в некоторых случаях можно называть «индексом ранжирования». Если данное числовое значение больше единицы, то стволы двух скважин абсолютно отдельны. Если данное числовое значение равно единице, то поверхности неопределенности могут касаться (в зависимости от запаса, с которым рассчитано данное значение). Если же данное значение меньше единицы, то поверхности неопределенности двух стволов скважин могут накладываться друг на друга, что может указывать на необходимость скорректировать траекторию ствола скважины и/или уделить особое внимание этому участку во избежание опасных ситуаций при продолжении бурения.
[0045] Ниже приведено описание расчета показателя близости с применением методик проецирования на плоскость. На фиг. 7 показан в аксонометрии вид двух стволов 702 и 704 скважин, имеющих произвольные траектории и отходящих от земной поверхности 100. Части стволов 702 и 704 скважин, заслоненные земной поверхностью 100, обозначены пунктирными линиями. Дальние концы каждого из стволов 702 и 704 скважин имеют неопределенность положения, причем на фиг. 7 эта неопределенность показана в виде окружностей 706 и 708, соответственно. При реализации методик проецирования на плоскость для расчета показателя близости, любая подходящая компьютерная система, работающая по компьютерным командам, проецирует неопределенность положения в точке на первом стволе 702 скважины (например, на дальнем конце ствола скважины) на горизонтальную поверхность, находящуюся выше или ниже фактического положения точки на первом стволе 702 скважины. Аналогично, по компьютерным командам на горизонтальную поверхность, находящуюся выше или ниже фактического положения точки на втором стволе 704 скважины, проецируют неопределенность положения в точке на втором стволе 704 скважины (например, на дальнем конце ствола скважины). Проецировать можно на любую подходящую горизонтальную поверхность, и, как показано на фиг. 7, этой поверхностью может быть земная поверхность 100. Например, в приведенном для примера случае, показанном на фиг. 7, где поверхности неопределенности имеют круглую форму на плоскости, перпендикулярной стволу скважины на его дальнем конце, проекции на земную поверхность имеют форму эллипсов.
[0046] В этих приведенных для примера ситуациях указанные проекции можно использовать для расчета показателя близости. На фиг. 8 показан вид сверху горизонтальной плоскости 800, на которую спроецированы окружности 706 и 708 неопределенности. В частности, проекция 802 в виде эллипса соответствует окружности 706 неопределенности, а проекция 804 в виде эллипса соответствует окружности 708 неопределенности. В некоторых вариантах осуществления изобретения показатель близости является физическим расстоянием между наружной границей проекции 802 и наружной границей проекции 804, как показано вектором 806 (вектор 806 лежит в плоскости 800). Таким образом, показатель близости в данном приведенном для варианта осуществлении изобретения представляет собой длину вектора 806.
[0047] В других случаях в показателе близости учитывают расстояние между центрами проекций 802 и 804, а также радиус каждой проекции (показанной в каждом случае в виде эллипса). В частности, согласно по меньшей мере, некоторым вариантам осуществления изобретения показатель близости можно рассчитать по формуле

где VP - показатель близости; DCC - расстояние между центрами двух проекций; RP1 - радиус первой проекции; RP2 - радиус второй проекции. В тех случаях, когда проекции имеют эллиптическую форму, в качестве RP можно выбрать большую ось или малую ось проекции. Например, для проекции 802 можно использовать большую ось 808 или малую ось 810. Таким образом, для расчета показателей близости с бόльшим запасом для каждой проекции можно использовать большую ось, а для расчета показателей близости с меньшим запасом для каждой проекции могут использовать малую ось. В других случаях можно использовать большую ось одной проекции и малую ось другой проекции.
[0048] В результате расчета показателя близости по приведенной для примера формуле (2) получают численное значение, которое в некоторых случаях можно называть «индексом ранжирования». Если данное числовое значение больше единицы, то стволы двух скважин абсолютно отдельны. Если данное числовое значение равно единице, то поверхности неопределенности могут касаться (в зависимости от запаса, с которым рассчитано данное значение). Если же данное значение меньше единицы, то поверхности неопределенности двух стволов скважин могут накладываться друг на друга, что может указывать на необходимость скорректировать траекторию ствола скважины и/или уделить особое внимания этому участку во избежание опасных ситуаций при продолжении бурения.
[0049] Размер поверхностей неопределенности можно рассчитывать любым подходящим способом. Например, в вариантах осуществления изобретения, где ствол скважины находится в процессе бурения (и где диаметр разрыва еще не учтен), радиус поверхности неопределенности в любом конкретном месте равен сумме радиуса ствола скважины и радиуса ошибки, как показано на фиг. 9. В частности, радиус поверхности неопределенности можно рассчитать по формуле

где RU - радиус поверхности неопределенности в конкретном месте; RWB - радиус ствола скважины в конкретном месте; RERR - радиус ошибки в конкретном месте.
[0050] В других случаях, например, когда ствол скважины обсажен, в нем выполнено отверстие и через него осуществлен гидроразрыв, радиус поверхности неопределенности может быть равен сумме радиуса обсадной колонны, радиуса ошибки и радиуса диаметра разрыва, как показано на фиг. 10. В частности, радиус поверхности неопределенности можно рассчитать по формуле

где RU - радиус поверхности неопределенности в конкретном месте; RCS - радиус ствола скважины в конкретном месте; RERR - радиус ошибки в конкретном месте; RFRAC - радиус диаметра разрыва в конкретном месте. В равной степени могут быть использованы другие механизмы расчета радиуса поверхности неопределенности. Кроме того, могут быть использованы разные механизмы учета размера поверхности неопределенности для каждой скважины. Другими словами, необязательно должна быть использована одна и та же методика расчета радиуса поверхности неопределенности для первой скважины и соседней скважины.
[0051] Кроме того, для расчета показателя близости могут быть использованы иные методики. Например, в ситуациях, когда в радиусе поверхности неопределенности учитывают радиус ошибки, связанный со стволом скважины (например, как на фиг. 9) и/или с обсадной колонной (как на фиг. 10), в других приведенных для примера вариантах осуществления изобретения показатель близости можно рассчитать по формуле

где VP - показатель близости; DCC - расстояние между центрами двух стволов скважин; ROW - радиус ствола соседней скважины; RERR1 - радиус ошибки для первого ствола скважины, а RERR-OW - радиус ошибки для ствола соседней скважины.
[0052] В результате расчета показателя близости по приведенной для примера формуле (6) получают численное значение, которое в некоторых случаях можно называть «индексом ранжирования». Если данное числовое значение больше единицы, то стволы двух скважин абсолютно разделены. Если данное числовое значение равно единице, то поверхности неопределенности могут касаться (в зависимости от запаса, с которым рассчитано данное значение). Если же данное значение меньше единицы, то поверхности неопределенности двух стволов скважин могут накладываться друг на друга, что может указывать на необходимость корректировать траектории ствола скважины и/или уделить особое внимание этому участку во избежание опасных ситуаций при продолжении бурения.
[0053] На фиг. 11 проиллюстрирован способ согласно, по меньшей мере, некоторым вариантам осуществления изобретения. В частности, способ начинается этапом 1100 и содержит получение данных, указывающих на положение первого ствола скважины (этап 1102); считывание данных, указывающих на положение ствола соседней скважины (этап 1104); считывание данных, указывающих на диаметр разрыва для ствола соседней скважины (этап 1106); расчет первой неопределенности положения первого ствола скважины (этап 1108); расчет второй неопределенности положения ствола соседней скважины с учетом данных, указывающих на положение, и данных, указывающих на диаметр разрыва (этап 1110); и генерирование показателя близости неопределенностей положения (этап 1112). Способ заканчивается этапом 1114, и в некоторых случаях этапы способа сразу повторяют с самого начала.
[0054] На фиг. 12 показана компьютерная система 1200 согласно, по меньшей мере, некоторым вариантам осуществления изобретения. Любой из вариантов осуществления изобретения или все варианты осуществления изобретения, в которых получают данные о положении стволов скважин, считывают данные о диаметрах разрыва, рассчитывают неопределенность положения, генерируют показатели близости и/или выдают указания на изменения направления стволов скважин, частично или полностью могут быть реализованы в компьютерной системе, такой как показана на фиг. 12, или в компьютерных системах, которые будут разработаны в будущем. В некоторых случаях различные варианты осуществления изобретения реализуют в виде программных средств, «модульных» или добавляемых к существующим программным средствам, таким как продукты с зарегистрированным товарным знаком DECISIONSPACE® производства компании Landmark Graphics Corporation (г. Хьюстон, шт. Техас, США).
[0055] В частности, компьютерная система 1200 содержит главный процессор 1210, соединенный с главным запоминающим устройством 1212 и другими периферийными компонентами компьютерной системы через интегрированный главный мост 1214. Главный процессор 1210 может быть одноядерным или многоядерным устройством. Кроме того, в компьютерной системе 1200 могут использовать несколько главных процессоров 1210. Главный процессор 1210 соединен с главным мостом 1214 через главную шину 1216, кроме того, главный мост 1214 может быть интегрирован в главный процессор 1210. Таким образом, в компьютерной системе 1200 могут использовать другие конфигурации шин или мостов для передачи данных между шинами - в дополнение к показанным на фиг. 12 или вместо них.
[0056] Главное запоминающее устройство 1212 соединено с главным мостом 1214 через шину 1218 памяти. Таким образом, главный мост 1214 содержит блок управления запоминающим устройством, который управляет групповыми операциями обмена данными с главным запоминающим устройством 1212 путем распределения сигналов управления для доступа к памяти. В других вариантах осуществления изобретения блок управления запоминающим устройством реализован непосредственно в главном процессоре 1210, и главное запоминающее устройство 1212 может быть соединено с главным процессором 1210 напрямую. Главное запоминающее устройство 1212 функционирует в качестве рабочей памяти главного процессора 1210 и состоит из одного запоминающего устройства или из матрицы запоминающих устройств, в которых хранятся программы, команды и данные. Главное запоминающее устройство 1212 может содержать запоминающее устройство любого типа, например динамическое оперативное запоминающее устройство (DRAM) или динамическое оперативное запоминающее устройство любого подвида, в том числе синхронное динамическое оперативное запоминающее устройство (SDRAM), динамическое оперативное запоминающее устройство с увеличенным временем доступности выходных буферов данных (EDODRAM) или динамическое оперативное запоминающее устройство стандарта компании Rambus (RDRAM). Главное запоминающее устройство 1212 является примером энергонезависимого машиночитаемого носителя информации, в том числе программ и команд. Кроме того, главное запоминающее устройство 1212 может представлять собой жесткий диск или устройство флэш-памяти.
[0057] В приведенном примере компьютерная система 1200 также содержит второй мост 1228, соединяющий первичную шину 1226 расширения с различными вторичными шинами расширения, например с шиной 1230 с малым количеством контактов (LPC) и с шиной 1232 взаимосвязи периферийных компонентов (PCI). Мост 1228 может быть совместим с другими вторичными шинами расширения.
[0058] Шина 1230 LPC соединяет мост 1228 и запоминающее устройство 1236 со встроенными программными средствами, который представляет собой постоянное запоминающее устройство (ROM), содержащее встроенные программы, выполняемые главным процессором 1210. В программных средствах содержатся программы, выполняемые только после завершения процедур самотестирования при включении питания (POST), и команды обращения к памяти. Процедуры самотестирования при включении питания (POST) и команды обращения к памяти выполняют в компьютерной системе различные функции до того, как управление компьютерной системой будет передано операционной системе. Компьютерная система 1200 дополнительно содержит плату 1238 сетевого интерфейса (NIC), соединенную с шиной 1232 PCI. Плата 1238 сетевого интерфейса (NIC) предназначена для соединения компьютерной системы 1200 с сетью передачи данных, например с Интернетом, локальными или глобальными сетями.
[0059] Изображенная на фиг. 12 компьютерная система 1200 дополнительно может содержать суперконтроллер 1240 ввода-вывода, соединенный с мостом 1228 через шину 1230 LPC. Суперконтроллер 1240 ввода-вывода управляет разнообразными функциями компьютерной системы, например, обеспечивает взаимодействие с различными устройствами ввода и вывода, в том числе с клавиатурой 1242, манипулятором 1244 (например, мышью), манипулятором в виде игрового контроллера 1246, различными последовательными портами, дисководами для гибких дисков и прочими дисководами. Приставка «супер» в названии суперконтроллера 1240 ввода-вывода указывает на то, что данный контроллер может выполнять большое количество функций ввода-вывода.
[0060] Компьютерная система 1200 дополнительно содержит графический процессор 1250 (GPU), соединенный с главным мостом 1214 через шину 1252, например шину повышенной производительности PCI-Express (также называемую PCI-Ε) или шину усовершенствованной графической обработки (AGP). Кроме данных видов шин можно эквивалентно использовать другие шинные системы, в том числе разработанные позднее даты разработки указанных видов шин. Кроме того, графический процессор 1250 можно соединить с первичной шиной 1226 расширения или с одной из вторичных шин расширения (например, с шиной 1232 PCI). Графический процессор 1250 соединен с устройством 1254 отображения информации, которое может представлять собой любое подходящее устройство отображения информации, предназначенное для картирования и/или визуализации изображения или текста (например, для визуализации траекторий стволов скважин, приведенных на фиг. 1 и 3-7). Графический процессор 1250 содержит встроенный процессор 1256, а также встроенное запоминающее устройство 1258. Таким образом, при получении сигналов от главного процессора 1210 процессор 1256 может производить графическую обработку. Кроме того, запоминающее устройство 1258 может иметь значительно больший объем памяти, порядка нескольких сотен мегабайтов и выше. Таким образом, после получения соответствующей команды от главного процессора 1210 графический процессор 1250 может выполнять расчеты для формирования графического изображения, выводимого системой отображения, и, в конечном итоге, выводить на экран необходимые графические данные без дальнейшего участия главного процессора 1210 или не получая от него данные.
[0061] В описании и формуле настоящего изобретения конкретные компоненты могут быть описаны применительно к алгоритмам и/или этапам, выполняемым программным приложением, которое может содержаться на энергонезависимом носителе информации (то есть отличном от волны несущей частоты или сигнала, распространяемого по проводникам). Различные варианты осуществления изобретения также относятся к системе, предназначенной для выполнения различных этапов и операций, описанных в данной заявке. Эта система может быть специально сконструированным устройством, таким как электронное устройство, или может содержать один или несколько компьютеров общего назначения, которые могут реагировать на команды для выполнения этапов, описанных в данной заявке. Для выполнения таких функцией несколько компьютеров могут объединять в сеть. Программные команды могут хранить на любом носителе считываемой компьютером информации, например на магнитных или оптических дисках, картах, запоминающих устройствах и т.п.
[0062] Упоминание словосочетаний «один вариант осуществления изобретения», «вариант осуществления изобретения» и «конкретный вариант осуществления изобретения» обозначает, что конкретный элемент или характеристика включены в по меньшей мере один вариант осуществления изобретения. Словосочетания «в одном варианте осуществления изобретения», «вариант осуществления изобретения» и «конкретный вариант осуществления изобретения» могут встречаться по тексту в разных местах, однако не обязательно относятся к одному и тому же варианту осуществления изобретения.
[0063] На основании приведенного в данном документе описания изобретения специалист может реализовать программные средства, созданные согласно приведенному описанию, на базе соответствующих компьютерных аппаратных средств общего назначения или особого назначения, в результате чего могут быть сформированы компьютерная система и/или компьютерные компоненты согласно вариантам осуществления настоящего изобретения; могут быть сформированы компьютерная система и/или компьютерные компоненты для реализации предложенного способа в рамках вариантов осуществления настоящего изобретения и/или может быть сформирован носитель считываемой компьютером информации, в том числе программных средств, посредством которых могут быть реализованы аспекты вариантов осуществления предложенного способа.
[0064] Вышеприведенное описание предназначено для пояснения сути и различных вариантов осуществления настоящего изобретения. Настоящее изобретение может подвергаться различным изменениям и модификациям, понятным специалисту на основе прочтения вышеприведенного описания. Например, различные описанные в данном документе методики в ином случае могут быть применимы для планирования и/или проводки стволов скважин с учетом любых параметров подземных объектов (например, планирования и/или проводки стволов скважин для достижения требуемой температуры в стволе скважины; планирования и/или проводки стволов скважин для достижения требуемого объема пластовых флюидов в стволе скважины; планирования и/или проводки стволов скважин в зависимости от реакции на изменение пластового давления формации, в которой бурят скважину; планирования и/или проводки стволов скважин для обхода геологических разрывов). Ниже приведена формула изобретения, охватывающая все эти изменения и модификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА ДЛЯ ПРОЕКТИРОВАНИЯ РАЗМЕЩЕНИЯ КУСТОВЫХ ПЛОЩАДОК НА МЕСТОРОЖДЕНИИ | 2017 |
|
RU2685005C1 |
| КОМПЛЕКСНЫЙ ПРИБОР ДЛЯ УПРАВЛЕНИЯ ГЕОФИЗИЧЕСКИМИ ИССЛЕДОВАНИЯМИ СКВАЖИНЫ И ПЛАНИРОВАНИЯ БУРЕНИЯ | 2013 |
|
RU2620691C1 |
| ПЛАНИРОВАНИЕ СКВАЖИНЫ С ПОМОЩЬЮ ГЕОМЕХАНИЧЕСКОГО СДВИГА | 2020 |
|
RU2779040C1 |
| УПРАВЛЕНИЕ РАЗРАБОТКОЙ СТВОЛА СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ РАСЧЁТОВ НЕОПРЕДЕЛЁННОСТИ | 2013 |
|
RU2643057C2 |
| СПОСОБ И СИСТЕМА КОМБИНИРОВАННОГО СОПРОВОЖДЕНИЯ ПРОЦЕССА БУРЕНИЯ СКВАЖИНЫ | 2018 |
|
RU2687668C1 |
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2641054C2 |
| ПРОГНОЗИРОВАНИЕ НАПРЯЖЕНИЙ НА ИЗУЧАЕМОЙ ПЛОЩАДИ | 2009 |
|
RU2488146C2 |
| УПРАВЛЕНИЕ КОМПЛЕКСАМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2640607C1 |
| КОМПЛЕКСНЫЙ ПРИБОР ДЛЯ УПРАВЛЕНИЯ ГЕОФИЗИЧЕСКИМИ ИССЛЕДОВАНИЯМИ СКВАЖИНЫ И ПЛАНИРОВАНИЯ БУРЕНИЯ | 2013 |
|
RU2648782C2 |
| УСТРАНЕНИЕ СКАЧКООБРАЗНЫХ КОЛЕБАНИЙ БУРОВОГО СНАРЯДА | 2013 |
|
RU2638072C2 |

Изобретение относится к бурению скважин, в частности к средствам направленного бурения и корректировки траектории скважины. Техническим результатом является обеспечение предотвращения прямых или косвенных пересечений стволов скважины. Предложен способ для планирования и/или бурения стволов скважин, содержащий этапы, на которых получают данные, указывающие на положение первого ствола скважины, причем получение выполняют посредством компьютерной системы; считывают данные, указывающие на положение соседнего ствола скважины; считывают данные, указывающие на диаметр разрыва для соседнего ствола скважины; рассчитывают первую неопределенность положения первого ствола скважины; рассчитывают вторую неопределенность положения соседнего ствола скважины с учетом данных, указывающих на положение, и данных, указывающих на диаметр разрыва; и генерируют показатель близости неопределенностей положения. Предложены также компьютерная система и энергонезависимый машиночитаемый носитель для осуществления указанного способа. 3 н. и 21 з.п. ф-лы, 12 ил.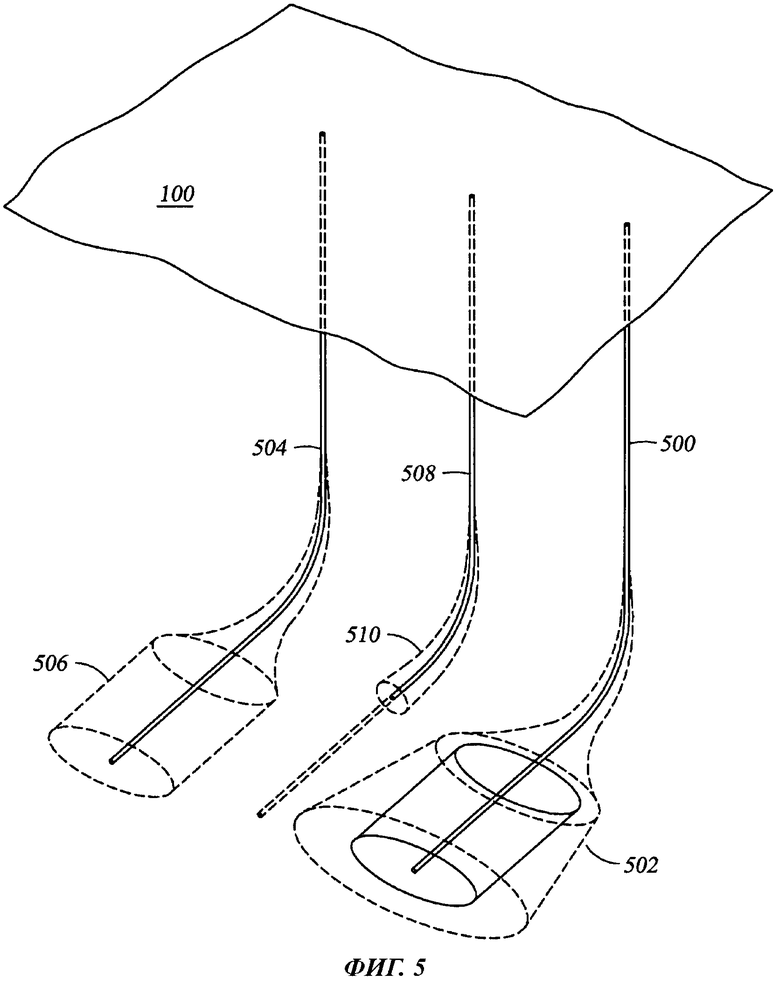
1. Способ для планирования и/или бурения стволов скважин, содержащий:
получение данных, указывающих на положение первого ствола скважины, причем получение выполняют посредством компьютерной системы;
считывание данных, указывающих на положение соседнего ствола скважины, причем считывание выполняют посредством компьютерной системы;
считывание данных, указывающих на диаметр разрыва для соседнего ствола скважины, причем считывание выполняют посредством компьютерной системы;
расчет первой неопределенности положения первого ствола скважины посредством компьютерной системы;
расчет второй неопределенности положения соседнего ствола скважины с учетом данных, указывающих на положение, и данных, указывающих на диаметр разрыва; и
генерирование показателя близости неопределенностей положения.
2. Способ по п. 1, в котором считывание данных, указывающих на диаметр разрыва, дополнительно содержит считывание, по меньшей мере, чего-либо одного из группы, содержащей диаметр разрыва законченного гидроразрыва соседнего ствола скважины и диаметр разрыва планируемого гидроразрыва соседнего ствола скважины.
3. Способ по п. 1, в котором
получение данных, указывающих на положение, дополнительно содержит
получение данных, указывающих на положение, в реальном времени при бурении первого ствола скважины; а также дополнительно содержит
предоставление указания на изменение направления первого ствола скважины для предотвращения пересечения наружной границы второй неопределенности положения, при этом предоставление выполняют посредством компьютерной системы в реальном времени при бурении первого ствола скважины.
4. Способ по п. 3, в котором предоставление указания на изменение направления дополнительно содержит предоставление указания на изменение направления таким образом, чтобы предотвратить пересечение прогнозируемым диаметром разрыва первого ствола скважины наружной границы второй неопределенности положения.
5. Способ по п. 1, в котором:
расчет первой неопределенности положения дополнительно содержит:
расчет первой неопределенности положения в точке на первом стволе скважины ниже поверхности; и
проецирование первой неопределенности положения на поверхность, в результате чего создают первую проекцию неопределенности;
расчет второй неопределенности положения дополнительно содержит:
расчет второй неопределенности положения в точке на соседнем стволе скважины ниже поверхности; и
проецирование второй неопределенности положения на поверхность, в результате чего создают вторую проекцию неопределенности.
6. Способ по п. 5, в котором генерирование показателя близости дополнительно содержит деление расстояния между центрами проекций неопределенности на сумму первого радиуса первой неопределенности положения и второго радиуса второй неопределенности положения.
7. Способ по п. 6, в котором первый радиус является, по меньшей мере, чем-либо одним из группы, содержащей радиус большой оси первой проекции неопределенности и радиус малой оси первой проекции неопределенности.
8. Способ по п. 1, в котором генерирование показателя близости дополнительно содержит расчет расстояния между наружной границей первой неопределенности положения и наружной границей второй неопределенности положения.
9. Компьютерная система для планирования и/или бурения стволов скважин, содержащая:
процессор;
запоминающее устройство, соединенное с процессором;
при этом запоминающее устройство выполнено с возможностью хранить команды, которые, при выполнении их процессором, обусловливают
получение данных, указывающих на положение первого ствола скважины;
считывание данных, указывающих на положение соседнего ствола скважины;
считывание данных, указывающих на диаметр разрыва для соседнего ствола скважины;
расчет первой неопределенности положения первого ствола скважины;
расчет второй неопределенности положения соседнего ствола скважины на основании данных, указывающих на положение, и данных, указывающих на диаметр разрыва; и
генерирование параметра близости неопределенностей положения.
10. Компьютерная система по п. 9, в которой при считывании процессором данных, указывающих на диаметр разрыва, команды дополнительно обусловливают считывание процессором, по меньшей мере, чего-либо одного из группы, содержащей диаметр разрыва законченного гидроразрыва соседнего ствола скважины и диаметр разрыва планируемого гидроразрыва соседней скважины.
11. Компьютерная система по п. 9, в которой
при получении процессором данных, указывающих на положение, команды дополнительно обусловливают получение процессором данных, указывающих на положение в реальном времени при бурении первого ствола скважины; и
команды дополнительно обусловливают предоставление процессором, в реальном времени при бурении первого ствола скважины, указания на изменение направления первого ствола скважины для предотвращения пересечения наружной границы второй неопределенности положения.
12. Компьютерная система по п. 11, в которой при предоставлении процессором указания на изменение направления команды обусловливают предоставление процессором указания на изменение направления таким образом, чтобы предотвратить пересечение прогнозируемым диаметром разрыва первого ствола скважины наружной границы второй неопределенности положения.
13. Компьютерная система по п. 9, в которой
при расчете процессором первой неопределенности положения команды обусловливают выполнение процессором
расчета первой неопределенности положения в точке на первом стволе скважины ниже поверхности; и
проецирования первой неопределенности положения на эту поверхность, что ведет к созданию первой проекции неопределенности;
при этом при расчете процессором второй неопределенности положения команды обусловливают выполнение процессором:
расчета второй неопределенности положения в точке на стволе соседней скважины ниже поверхности; и
проецирования второй неопределенности положения на эту поверхность, что ведет к созданию второй проекции неопределенности.
14. Компьютерная система по п. 13, в которой при генерировании процессором показателя близости команды обусловливают выполнение процессором деления расстояния между центрами проекций неопределенности на сумму первого радиуса первой неопределенности положения и второго радиуса второй неопределенности положения.
15. Компьютерная система по п. 14, в которой первый радиус является, по меньшей мере, чем-либо одним из группы, содержащей радиус большой оси первой проекции неопределенности и радиус малой оси первой проекции неопределенности.
16. Компьютерная система по п. 9, в которой при генерировании процессором показателя близости команды обусловливают выполнение процессором расчета расстояния между наружной границей первой неопределенности положения и наружной границей второй неопределенности положения.
17. Энергонезависимый машиночитаемый носитель для хранения команд, выполнение которых процессором обеспечивает:
получение данных, указывающих на положение первого ствола скважины;
считывание данных, указывающих на положение ствола соседней скважины;
считывание данных, указывающих на диаметр разрыва для соседнего ствола скважины;
расчет первой неопределенности положения первого ствола скважины;
расчет второй неопределенности положения соседнего ствола скважины на основании данных, указывающих на положение, и данных, указывающих на диаметр разрыва; и
генерирование показателя близости неопределенностей положения.
18. Энергонезависимый машиночитаемый носитель по п. 17, в котором при считывании процессором данных, указывающих на диаметр разрыва, команды дополнительно обусловливают выполнение процессором считывание, по меньшей мере, чего-либо одного из группы, содержащей диаметр разрыва законченного гидроразрыва соседнего ствола скважины и диаметр разрыва планируемого гидроразрыва соседнего ствола скважины.
19. Энергонезависимый машиночитаемый носитель по п. 17, в котором
при получении процессором данных, указывающих на положение, команды дополнительно обусловливают получение процессором данных, указывающих на положение в реальном времени при бурении первого ствола скважины; и
при этом команды дополнительно обусловливают предоставление процессором, в реальном времени при бурении первого ствола скважины, указания на изменение направления первого ствола скважины для предотвращения пересечения наружной границы второй неопределенности положения.
20. Энергонезависимый машиночитаемый носитель по п. 19, в котором при предоставлении процессором указания на изменение направления команды обусловливают предоставление процессором указания на изменение направления таким образом, чтобы предотвратить пересечение прогнозируемым диаметром разрыва первого ствола скважины наружной границы второй неопределенности положения.
21. Энергонезависимый машиночитаемый носитель по п. 17, в котором:
при расчете процессором первой неопределенности положения команды, выполняемые процессором, обусловливают:
расчет первой неопределенности положения в точке на первом стволе скважины ниже поверхности; и
проецирование первой неопределенности положения на поверхность, что ведет к созданию первой проекции неопределенности;
при этом при расчете процессором второй неопределенности положения команды, выполняемые процессором, обусловливают:
расчет второй неопределенности положения в точке на стволе соседней скважины ниже поверхности; и
проецирование второй неопределенности положения на поверхность, что ведет к созданию второй проекции неопределенности.
22. Энергонезависимый машиночитаемый носитель по п. 21, в котором при генерировании процессором показателя близости команды обусловливают выполнение процессором деления расстояния между центрами проекций неопределенности на сумму первого радиуса первой неопределенности положения и второго радиуса второй неопределенности положения.
23. Энергонезависимый машиночитаемый носитель по п. 22, в котором первый радиус является, по меньшей мере, чем-либо одним из группы, содержащей радиус большой оси первой проекции неопределенности и радиус малой оси первой проекции неопределенности.
24. Энергонезависимый машиночитаемый носитель по п. 17, в котором при генерировании процессором показателя близости команды обусловливают расчет процессором расстояния между наружной границей первой неопределенности положения и наружной границей второй неопределенности положения.
| US 2009152005 A1, 18.06.2009 | |||
| US 2011079431 A1, 07.04.2011. |

