ОБЛАСТЬ ТЕХНИКИ
[1] Заявленное решение относится к способам и системам компьютерной обработки специализированных данных для обеспечения процесса сопровождения бурения скважин.
УРОВЕНЬ ТЕХНИКИ
[2] Успешность процесса строительства нефтяных и газовых скважин определяется как краткосрочными параметрами, которые проявляются в ходе бурения, так и долгосрочными показателями, которые становятся очевидны в ходе эксплуатации. Сопровождение бурения в настоящее время представляет собой комплексный инженерный процесс, включающий в себя целый спектр дисциплин.
[3] Задача геологов и специалистов по геологической проводке состоит не только в безопасном, быстром и эффективном процессе геонавигации, но и в максимальном отдалении сроков обводнения, пескопроявления и капитального ремонта скважин. Для решения этой задачи необходимо точно определить оптимальное положение ствола скважины в пласте. Поскольку скважина представляет собой объект в трехмерном пространстве, необходимо ввести систему координат и все сопутствующие понятия. Наряду с координатами будут необходимы глубины различных типов, так как в большинстве случаев одной координаты Z недостаточно. Если принять во внимание цель по проводке скважины внутри определенного интервала пласта, то появляется необходимость учета еще трех факторов: геометрии пласта (как проходит целевой интервал), геометрии скважины (как изменить траекторию скважины, чтобы попасть в интервал) и учет свойств пласта (приборы, которые помогут понять текущее положение относительно целевого интервала). Геомеханическое сопровождение бурения представляет собой процесс мониторинга параметров бурения и корректировки действий буровой команды в случае необходимости.
[4] Текущие экономические реалии, сложившиеся на рынке углеводородов, требуют от нефтегазодобывающих компаний постоянной оптимизации и повышения эффективности своей деятельности. Самая большая, и главное, доступная для оптимизации, затратная статья в деятельности любого оператора – строительство скважин. По различным оценкам, нефтегазодобывающие компании Северной Америки тратят ежегодно до 30 миллиардов долларов на различные проблемы, встречающиеся в бурении. Львиную долю этих затрат (до 60%) представляют собой различные проблемы, связанные с неустойчивостью ствола скважины при бурении.
[5] Наиболее тяжелые формы нарушения естественного состояния пород, неизбежно связанного с бурением, могут привести к интенсивным нефтегазоводопроявлениям, которые могут перейти в открытое фонтанирование. Работы по борьбе с данными осложнениями, вызванными неправильным выбором промывочной жидкости (гидродинамическое давление в скважине не скомпенсировано с пластовым давлением), длительны, трудоемки, требуют огромных финансовых затрат и нередко заканчиваются потерей скважины.
[6] Однако более распространенным типом осложнений во время бурения является неустойчивость стенок скважины, опять же вызванная некорректным выбором бурового раствора и превышением концентраций напряжений над прочностью породы. В самом простом случае, неустойчивость стенок приводит к увеличению шлама, овализации ствола, необходимостью более длительных промывок и потере времени на проработку ствола (нередко работы по нормализации ствола занимают более длительное время, чем непосредственно по углублению); также качество геофизических исследований скважины будут искажены под влиянием ухудшения состояния ствола. В других случаях, особенно при бурении наклонных и горизонтальных скважин, обвалообразование может привести к закупоркам, прихвату КНБК (компоновка низа буровой колонны), вплоть до потери открытого ствола и оборудования, необходимости бурения боковых стволов. Закупорки, в свою очередь, могут привести к созданию гидроудара, образованию трещины гидроразрыва, полной или частичной потере бурового раствора в пласт; сопровождающееся при этом падение давления в скважине создает опасность проявлений пластовых флюидов, а также дальнейшего обвалообразования. При этом, буровые растворы на углеводородной основе являются достаточно дорогим продуктом, а также критические экологические последствия возникают при разливе бурового раствора на морских месторождениях.
[7] С другой стороны, очевиден устойчивый тренд увеличения доли трудноизвлекаемых запасов углеводородов в общем объеме извлекаемых запасов. Число месторождений с «легкой» добычей постоянно сокращается. Ответом на данный вызов является перевод всех операций на автоматизированную и реальновременную основу, а также использование экспертизы мультидисциплинарной команды: геологов, петрофизиков, геомехаников, инженеров по бурению, специалистов по буровым растворам.
[8] Сразу же после возникновения команды с большим количеством участников от разных дисциплин становится очевидной проблема отсутствия единой программной среды, позволяющей, во-первых, предоставлять удобный мультидисциплинарный инструмент всем участникам бурения, а во-вторых, производить обновление моделей от всех дисциплин в режиме реального времени. Программное решение также должно быть способно обрабатывать и конструировать комплексные междисциплинарные модели.
[9] Наиболее близким аналогом заявленного решения можно считать способ, описанный в патенте РФ № 2560462 (Халлибертон Энерджи Сервисез Инк. (US), 20.08.2015). Известный способ направлен на определение траектории скважины, формируемой бурильной колонной, причем указанный способ содержит: получение данных, характеризующих один или более параметров бурения, между по меньшей мере двумя точками инклинометрии; усреднение полученных данных за заданные шаги приращения между указанными по меньшей мере двумя точками инклинометрии; расчет исходя из по меньшей мере указанных усредненных данных прогнозируемой реакции бурильной колонны для каждого из заданных шагов приращения; определение исходя из по меньшей мере указанной прогнозируемой реакции бурильной колонны изменения угла наклона и азимута для каждого из заданных шагов приращения; формирование прогнозируемой траектории скважины исходя из по меньшей мере указанного изменения угла наклона и азимута; сравнение указанной прогнозируемой траектории скважины с измеренной траекторией скважины; и если результаты указанного сравнения приемлемы, определение вероятного положения скважины исходя из по меньшей мере указанного изменения угла наклона и азимута для каждого из заданных шагов приращения.
[10] Известное решение не использует подход в измерении синтетических каротажных кривых и их применении в построении гибридной модели для определение наиболее оптимальной траектории для точной проводки скважины в рамках целевого интервала, которая одновременно формируется с учетом геомеханической и геонавигационной проводки скважины.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[11] Решаемой технической проблемой является обеспечение комбинированной модели для сопровождения процесса бурения скважины, которая объединяет в себя анализ геомеханических и геонавигационных параметров для обеспечения комплексного решения в части контроля процесса проводки скважины и контроля устойчивости ствола скважины.
[12] Техническим результатом является повышение точности моделирования процесса проводки скважины в рамках целевого интервала с контролем устойчивости ствола скважины.
[13] Заявленный способ комбинированного сопровождения процесса бурения скважины заключается в выполнении этапов, на которых:
- получают входные данные разрабатываемой скважины, включающие в себя по меньшей мере данные инклинометрии, данные ГИС и данные керна;
- получают каротажные данные по меньшей мере одной опорной скважины;
- формируют на основании упомянутых входных данных и каротажных данных по меньшей мере одной опорной скважины комбинированную модель, отображающую характеристики пород и прогнозирование положения ствола разрабатываемой скважины;
- определение по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины на основании каротажных данных по меньшей мере одной опорной скважины;
- выполняют расчет по меньшей мере одной синтетической каротажной кривой на основании упомянутой комбинированной модели и по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины;
- выполняют построение предварительной модели устойчивости ствола скважины, на основании определенной по меньшей мере одной траектории разрабатываемой скважины и рассчитанной по меньшей мере одной синтетической кривой;
- определяют на основании построенной предварительной модели устойчивости ствола скважины плановую траекторию, обеспечивающую максимальную проходку скважины внутри целевого интервала и устойчивость ствола скважины;
- получают параметры в процессе бурения разрабатываемой скважины, характеризующие инклинометрию, ГИС данные и буровые параметры;
- выполняют обновление упомянутой комбинированной модели и осуществляют контроль процесса разрабатываемой скважины на основании обновленной комбинированной модели.
[14] В одном из частных вариантов осуществления способа в ходе процесса бурения разрабатываемой скважины пересчитывают устойчивость ствола скважины на основании получаемых буровых параметров.
[15] В другом частном варианте осуществления способа дополнительно используют информацию о наличии трещин в пласте.
[16] В другом частном варианте осуществления способа при обновлении комбинированной модели геонавигации проверяют положение разрабатываемой скважины в пределах целевого пласта.
[17] В другом частном варианте осуществления способа выбор опорной скважины осуществляется за счет межскважинной корреляцию и структурной карты по кровле целевого пласта.
[18] В другом частном варианте осуществления способа предварительная модель устойчивости ствола скважины строится на основании параметров пластового давления, градиента гидроразрыва пласта, механических свойств породы и напряжений.
[19] Система комбинированного сопровождения процесса бурения содержит по меньшей мере один процессор и по меньшей мере одно средство памяти, хранящее машиночитаемые инструкции, которые при их выполнении процессором реализуют вышеуказанный способ.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
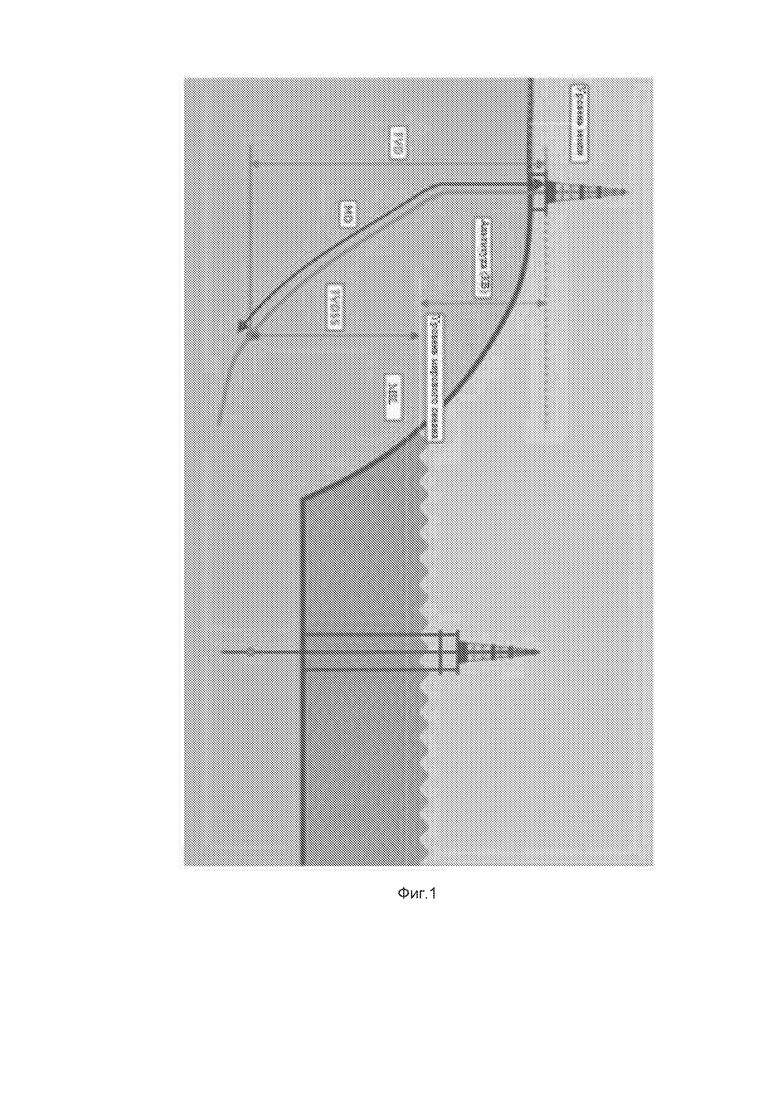
[20] Фиг. 1 иллюстрирует схему глубины скважины.
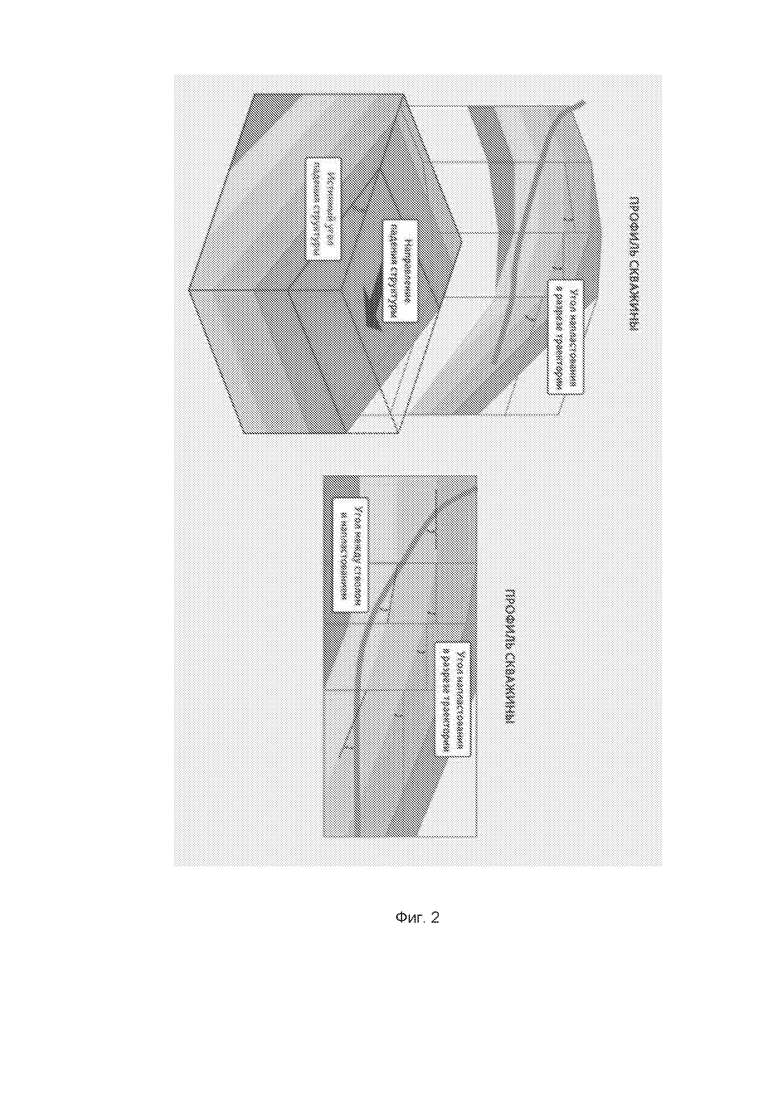
[21] Фиг. 2 иллюстрирует схему угла падения пласта.
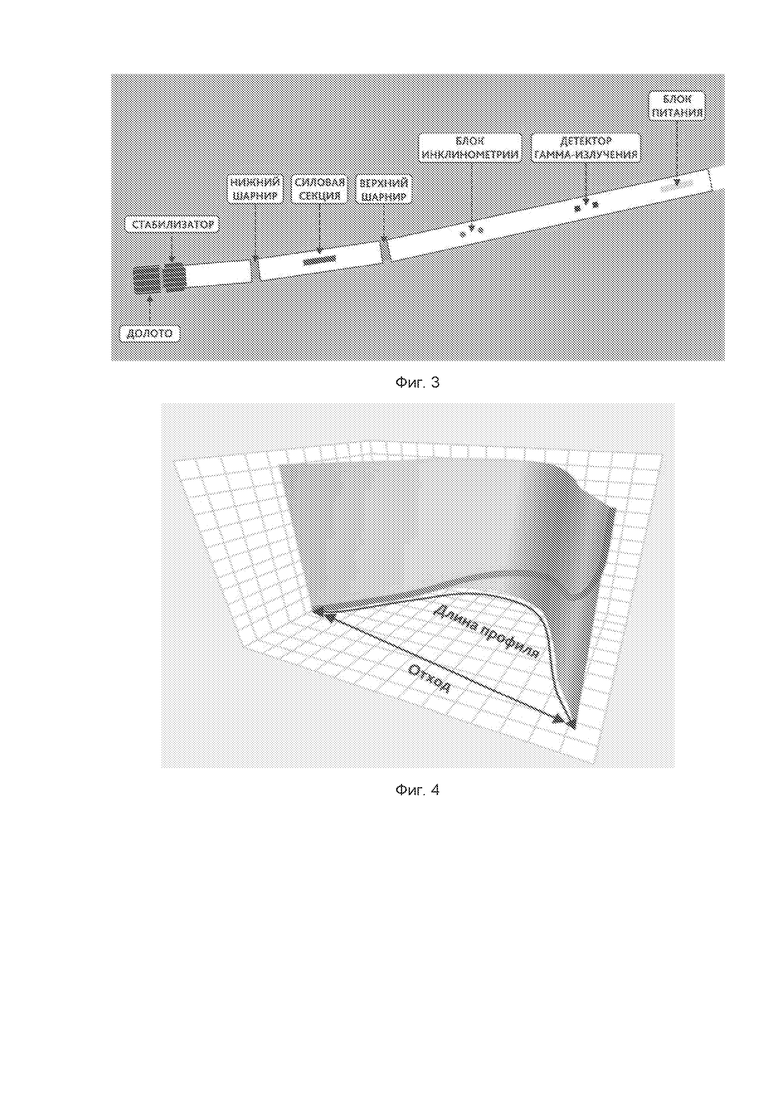
[22] Фиг. 3 иллюстрирует пример КНБК.
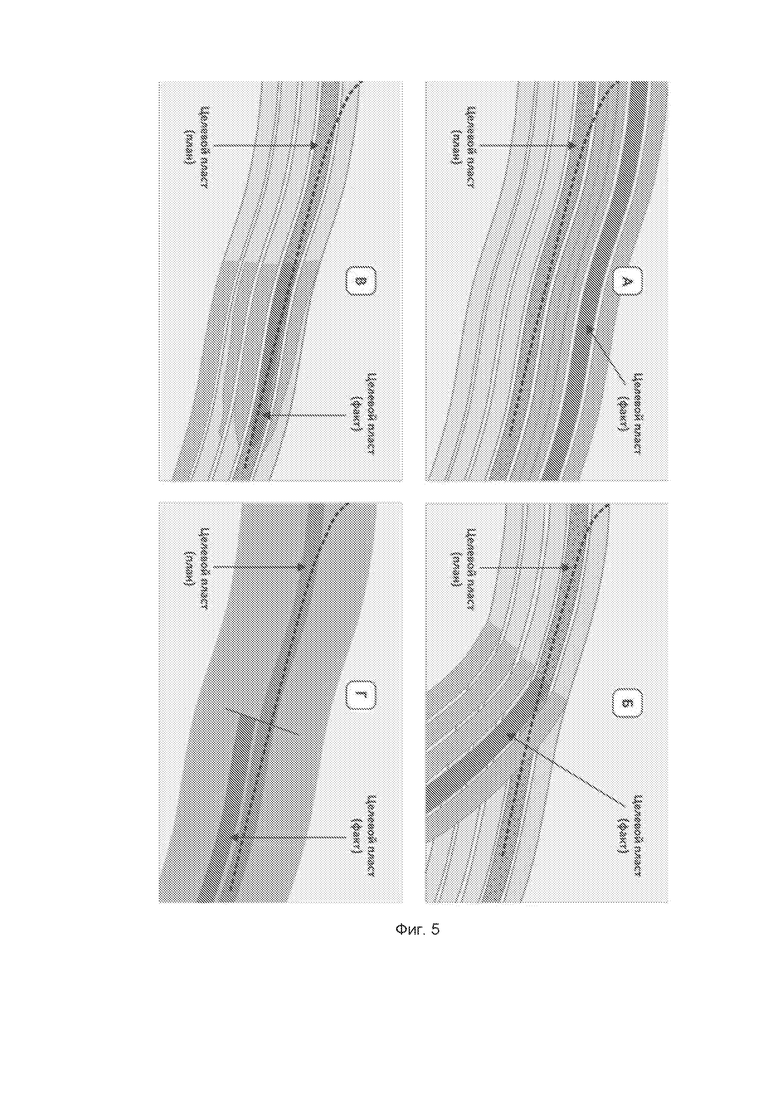
[23] Фиг. 4 иллюстрирует длину профиля и отход скважины.
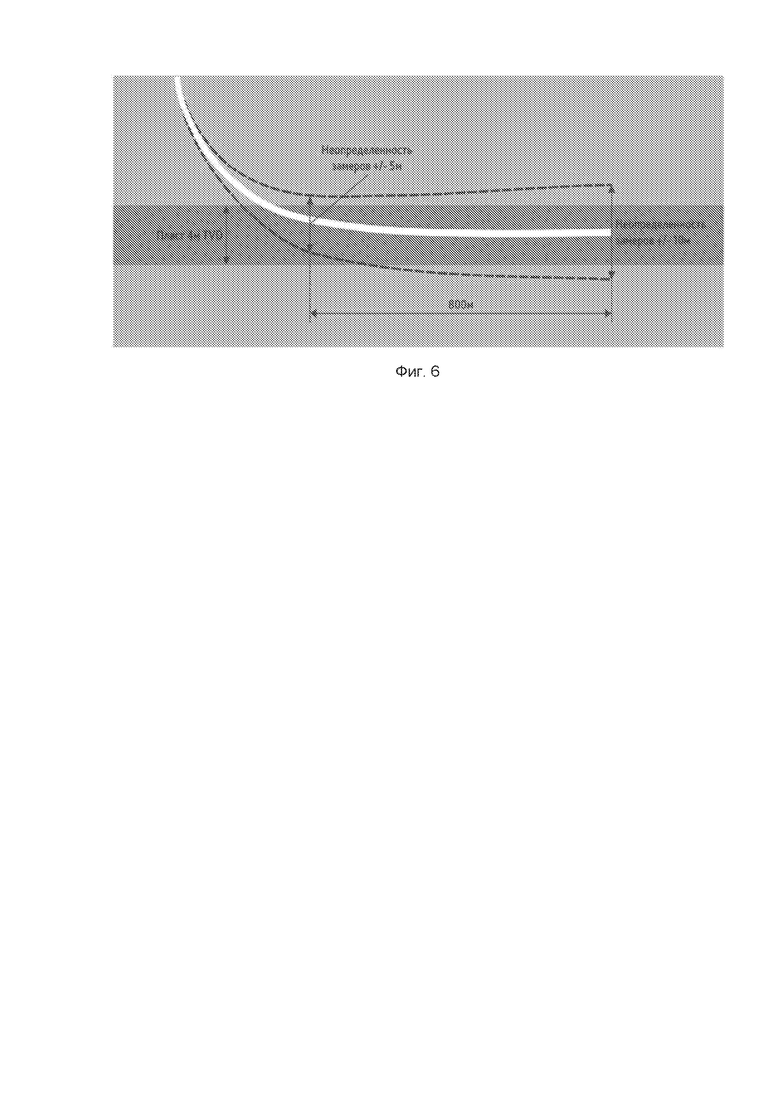
[24] Фиг. 5 иллюстрирует геологические неопределенности.
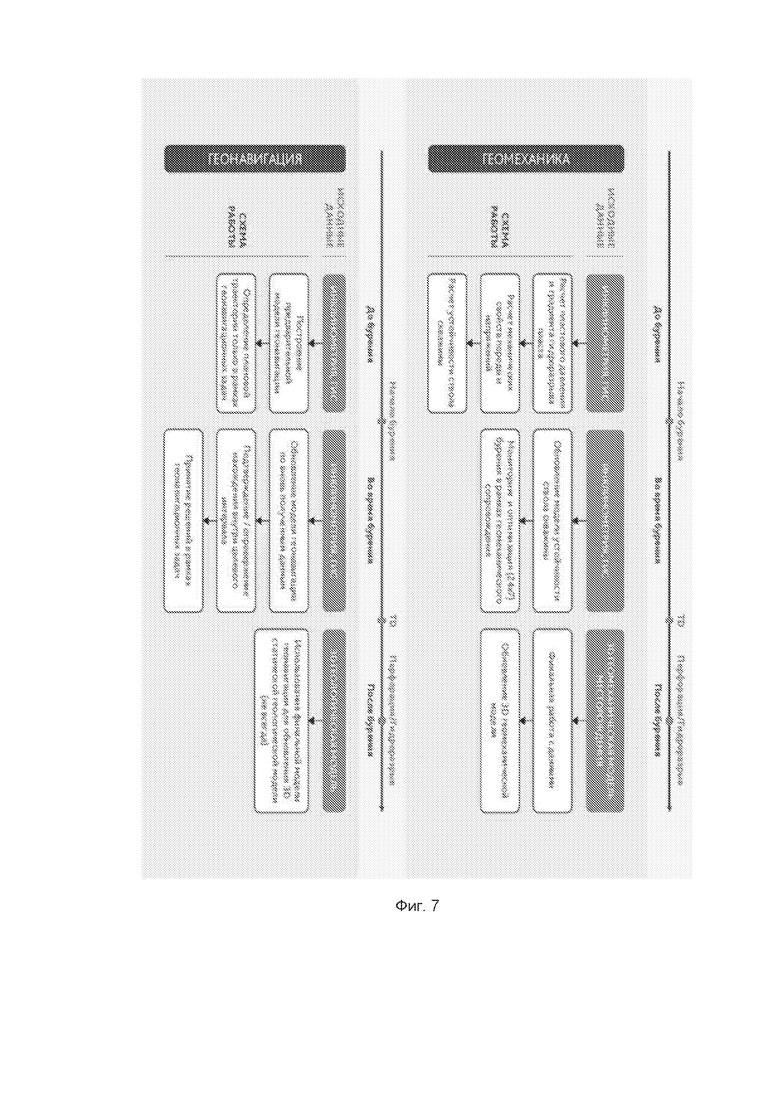
[25] Фиг. 6 иллюстрирует пример неопределенности замеров в горизонтальной скважине.
[26] Фиг. 7 иллюстрирует пример подхода по раздельному сопровождению строительства скважин.
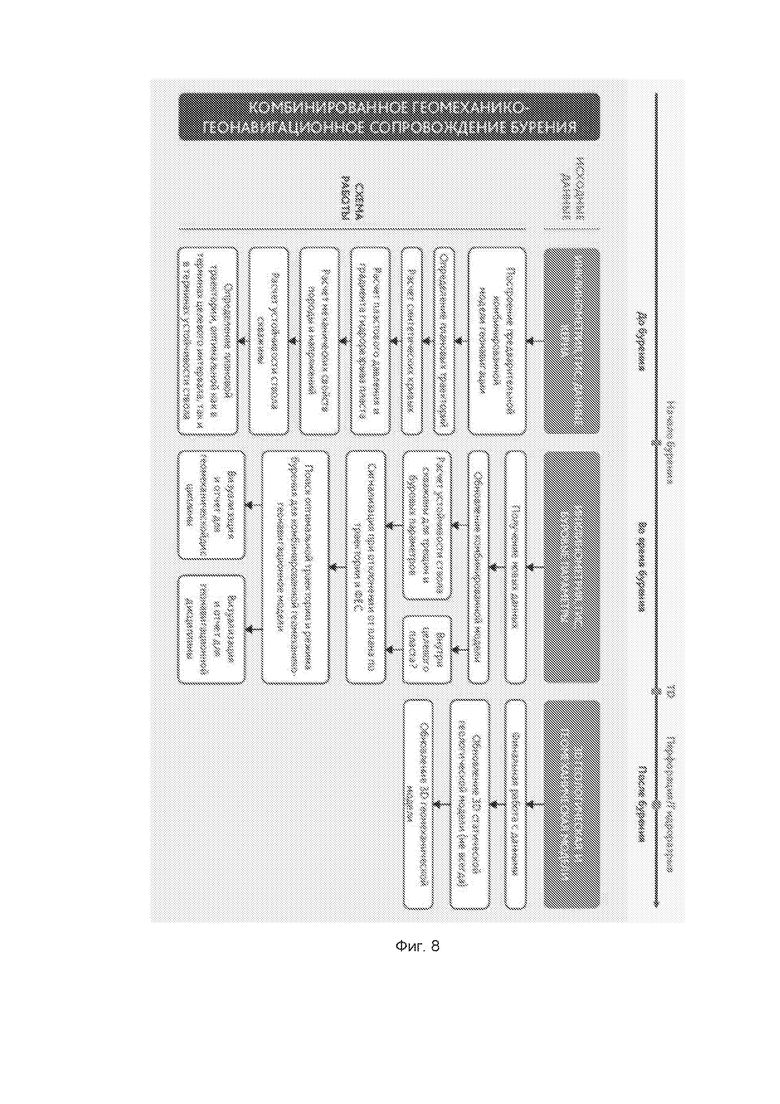
[27] Фиг. 8 иллюстрирует общую схему комбинированного сопровождения бурения скважин.
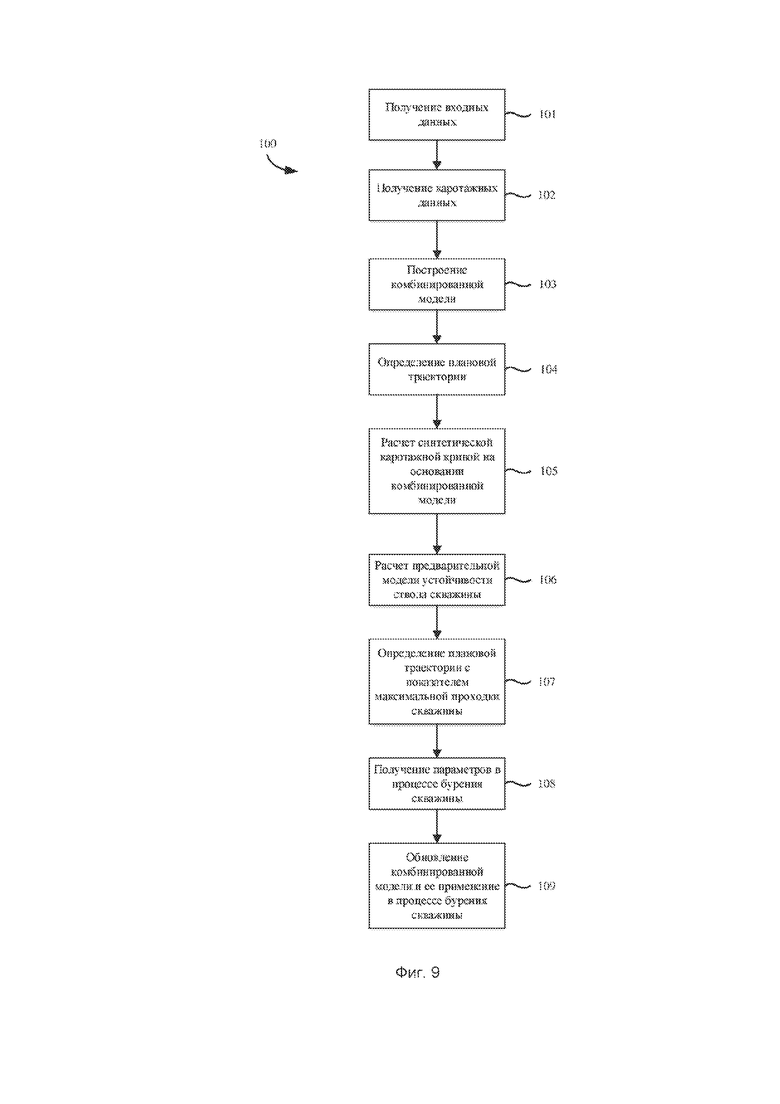
[28] Фиг. 9 иллюстрирует блок-схему заявленного способа.
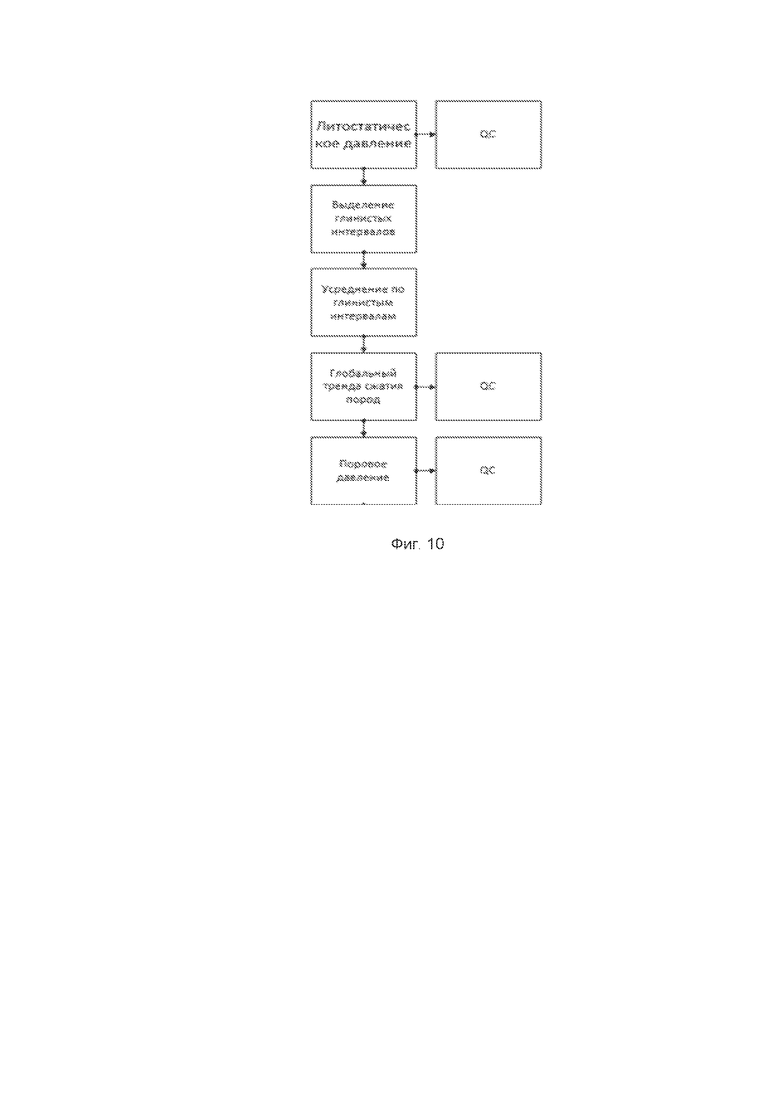
[29] Фиг. 10 иллюстрирует пример расчета пластового давления.
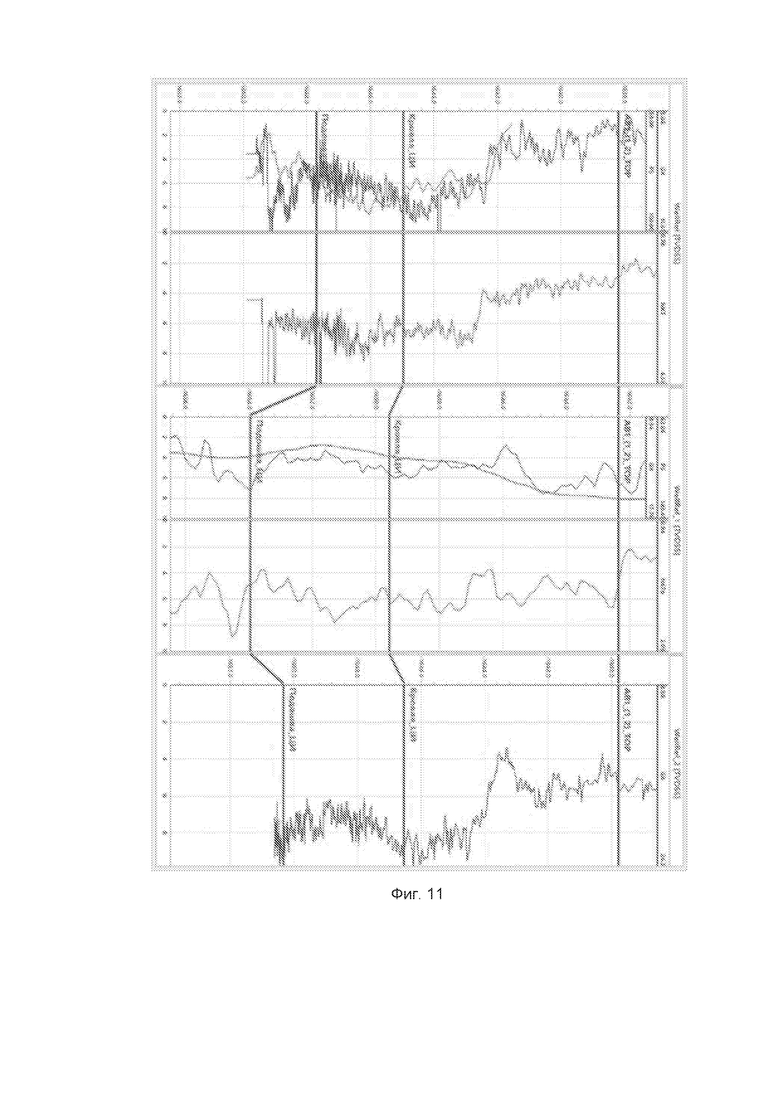
[30] Фиг. 11 иллюстрирует пример выбора опорных скважин.
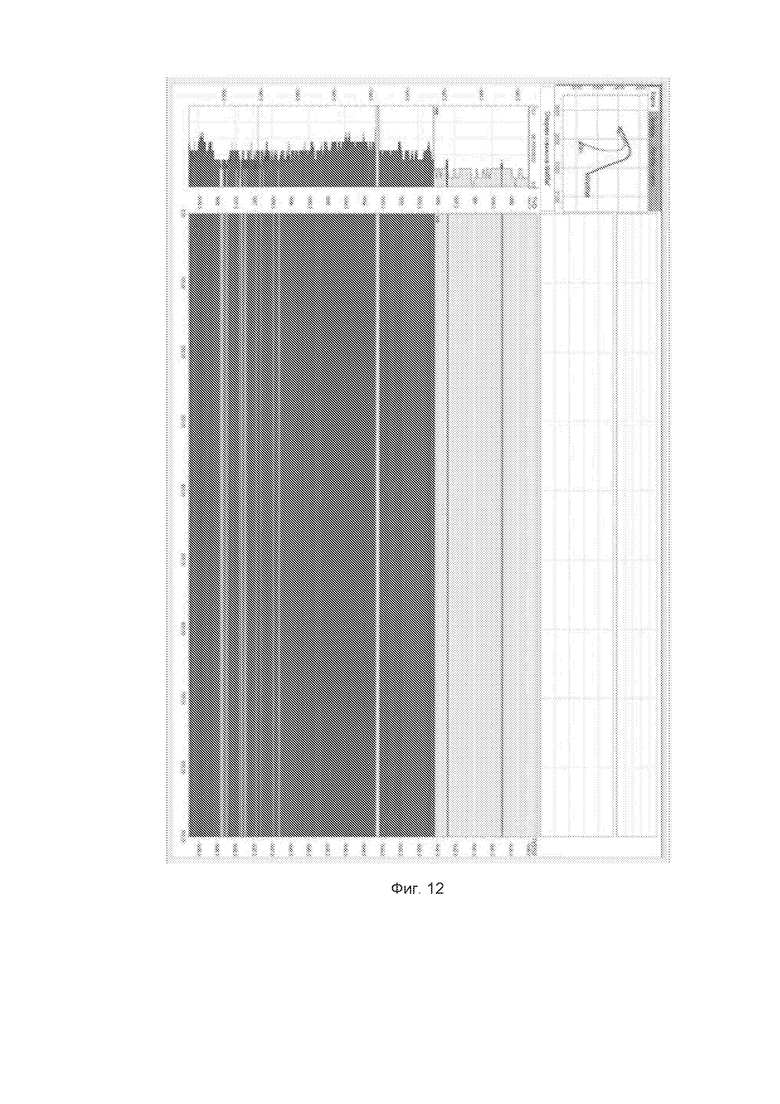
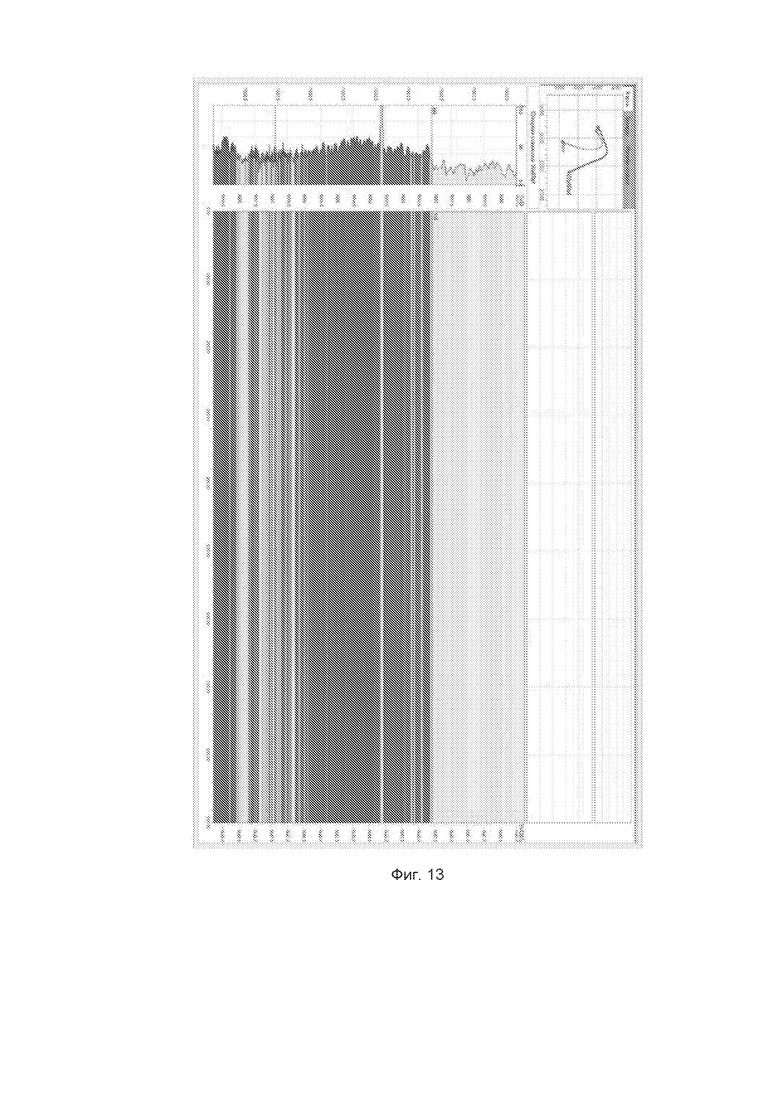
[31] Фиг. 12 – Фиг. 13 иллюстрируют пример построения первоначальной комбинированной модели для геологической проводки.
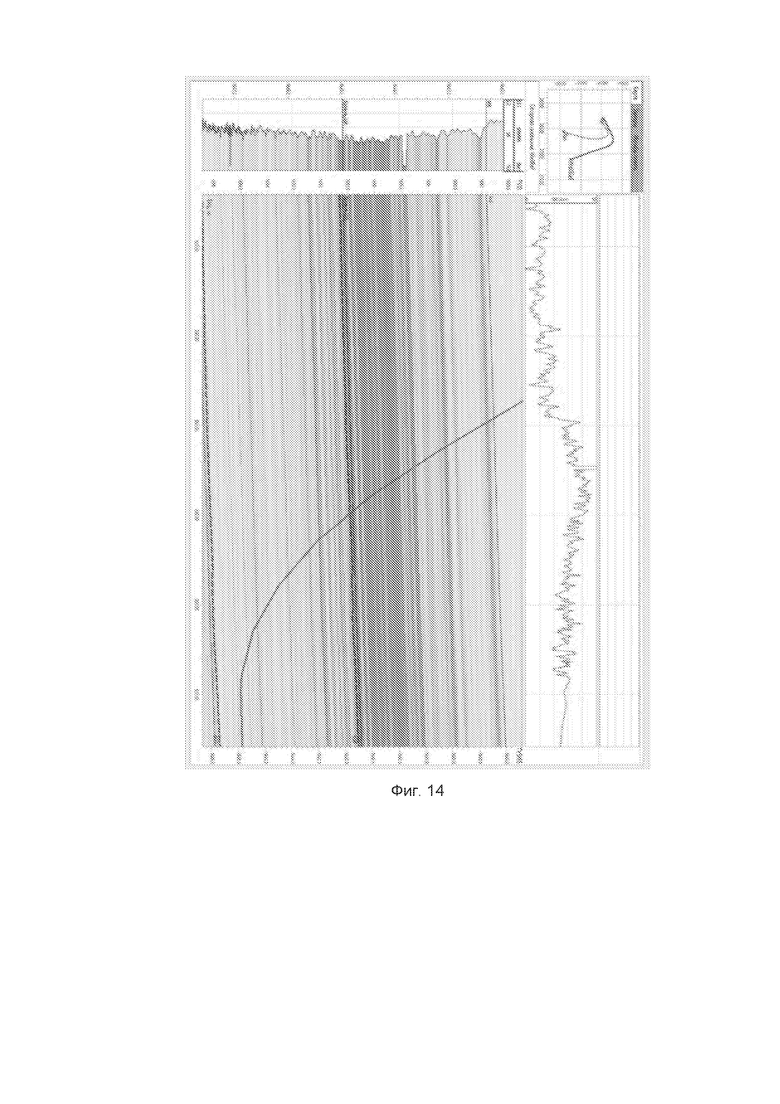
[32] Фиг. 14 иллюстрирует пример построения синтетической кривой.
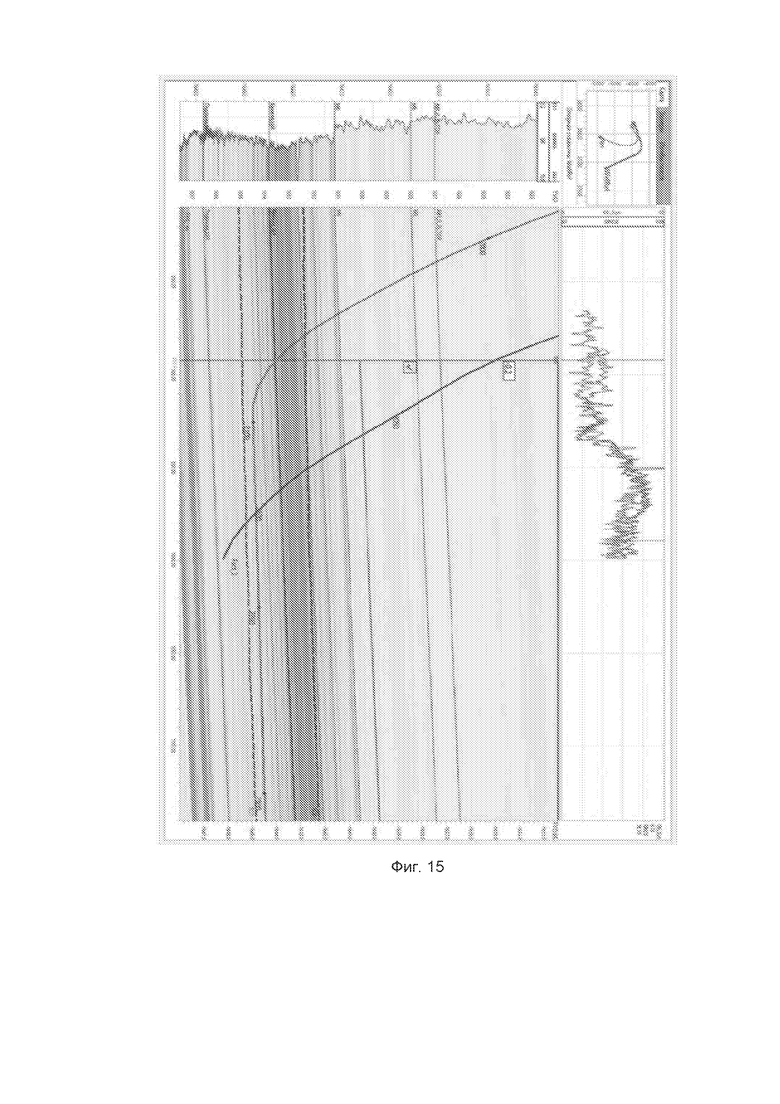
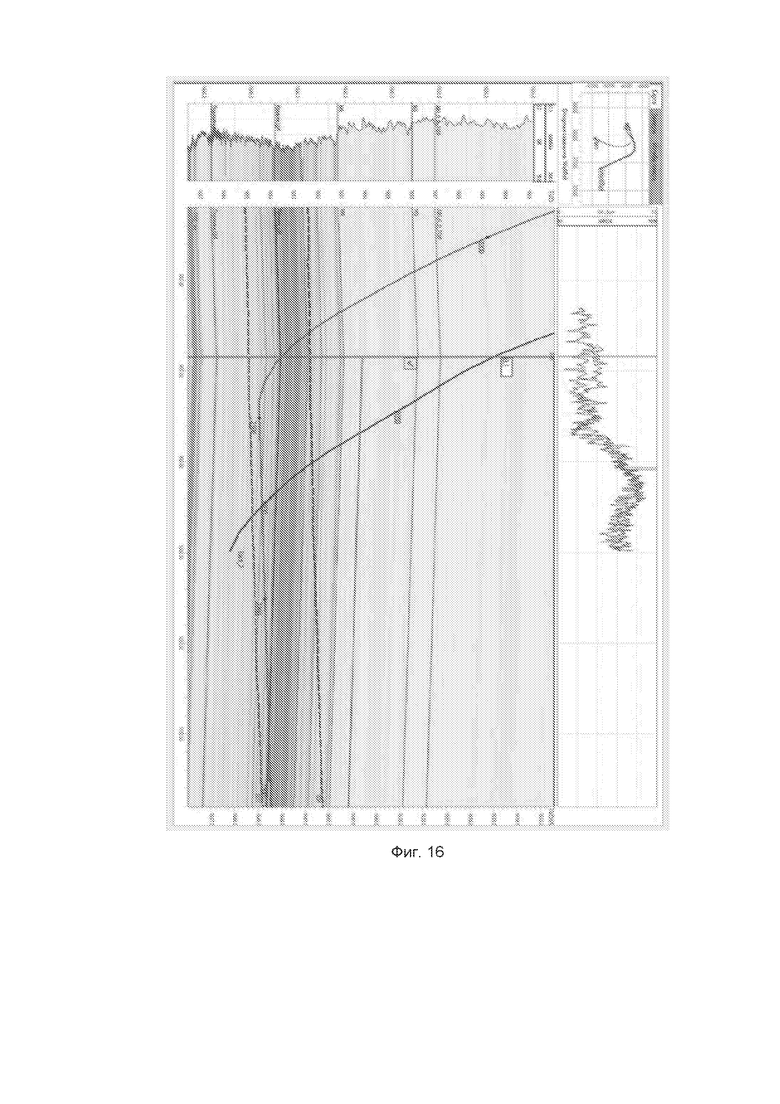
[33] Фиг. 15 - Фиг. 16 иллюстрируют пример сопоставления синтетического и фактического каротажей.
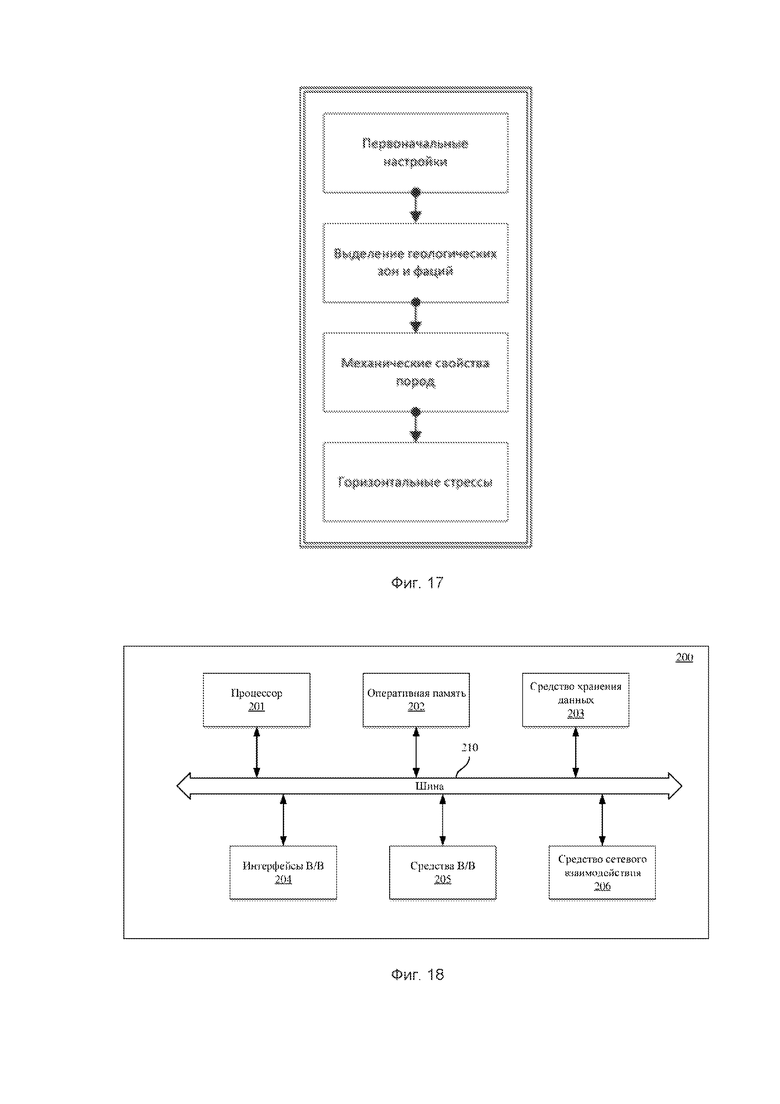
[34] Фиг. 17 иллюстрирует схему определения механических свойств и напряжений.
[35] Фиг. 18 иллюстрирует общий вид заявленной системы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[36] В настоящих материалах заявки будут использованы следующие термины, сокращения и определения.
[37] Устье скважины – «начало» отсчета глубины скважины (часто – считается от стола ротора).
[38] Координаты устья – пространственное (латеральное) положение устья скважины, считается в определенной системе координат (например, координатами X, Y, либо долгота/широта и т.п.)
[39] Координатная сетка – система координат, предназначенная для определения положения точки.
[40] Альтитуда – высота устья скважины над уровнем мирового океана (абсолютной отметки, равной 0).
[41] Глубина, измеренная по стволу (Measured Depth) – длина кривой траектории скважины на определенную точку замера (Фиг. 1).
[42] Глубина по вертикали (True Vertical Depth) – вертикальная глубина, глубина по вертикали от уровня стола ротора.
[43] Истинная глубина по вертикали (абсолютная отметка, True Vertical Depth Sub-Sea) – абсолютная глубина, глубина по вертикали от уровня моря.
[44] Конечная глубина – глубина забоя скважины.
[45] Уровень мирового океана (Mean Sea Level) – исходное положение свободной поверхности Мирового океана; стандарт, от которого отсчитывается абсолютная высота поверхности суши и глубины морей.
[46] Уровень земли (ground level) – высота поверхности земли от уровня мирового океана.
[47] Напластование – залегание осадочных горных пород в земной коре в виде пластов, пропластков или слоев.
[48] Поверхность (горизонт) – граница, разделяющая пласты, показывает структурную геометрию пласта.
[49] Угол (истинный) падения пласта (угол падения структуры) – угол между поверхностью пласта и горизонтальной плоскостью, т.е. между линией падения и направлением падения (Фиг. 2).
[50] Кажущийся угол падения пласта (относительный) – угол падения пласта в разрезе траектории скважины.
[51] Угол между стволом и падением структуры пласта – угол между осью скважины и падением пласта в разрезе траектории.
[52] Азимут угла падения пласта – угол между меридианом, на котором находится точка наблюдения, и линией падения пласта
[53] Структурная карта – карта, показывающая поверхность кровли или подошвы выбранного пласта или горизонта.
[54] Вертикальная мощность пласта (True Vertical Thickness) – толщина пласта, замеренная между его кровлей и подошвой по вертикали.
[55] Бурение скважины – процесс сооружения скважины путем разрушения горных пород с помощью бурового оборудования (бурильной колонны).
[56] Компоновка низа буровой колонны (КНБК) – нижняя часть бурильной колонны от долота до бурильных труб. В зависимости от задачи (зарезка бокового ствола скважины, бурение вертикального участка, набор кривизны, проведение исправительных работ) состав КНБК может варьироваться. Как правило, КНБК (Фиг. 3) состоит из долота, забойного двигателя, стабилизаторов; приборов, позволяющих выполнять измерения в процессе бурения; инструментов, позволяющих управлять траекторией скважины.
[57] Измерения во время бурения (Measurement While Drilling - MWD) – измерения во время бурения, связанные с определением текущего зенитного угла и магнитного азимута. Кроме того, могут замеряться уровни вибрации, нагрузка на долото, затрубное давление. Также на приборы MWD возложены функции обмена данными с поверхностью и снабжение энергией приборов LWD.
[58] Каротаж во время бурения (Logging While Drilling - LWD) – измерения во время бурения, связанные с определением геофизических характеристик пласта. Измерения могут производиться по широкому спектру методов: электромагнитный, плотностной, акустический, ядерно-магнитный, сейсмический, нейтронный.
[59] Управление траекторией скважины – возможность проводки траектории скважины в заданном направлении, основываясь на показаниях приборов MWD/LWD.
[60] Проекция на долото – проекция данных инклинометрии на текущий забой скважины, сделанная на базе фактических замеров и основных параметров КНБК.
[61] Телесистема (телеметрия) – прибор, позволяет осуществить замер зенитного и азимутального углов во время бурения, и передачу информации с забоя на поверхность.
[62] Современные телесистемы позволяют проводить множество других замеров (вибрация на долоте, гамма-каротаж, индукционный каротаж, резистивиметрия, затрубное давление), а также часто являются источником питания для других проборов каротажа во время бурения.
[63] Инклинометрия – метод контроля за пространственным положением оси скважины. Измеряют угол ее отклонения от вертикали (зенитный угол) и магнитный азимут проекции оси скважины на горизонтальную плоскость. Для измерений применяются электрические, фотографические и гироскопические инклинометры. Все остальные параметры, определяющие траекторию скважины в пространстве, рассчитываются из 3-х измеренных параметров – глубины по стволу, зенитного угла, магнитного азимута. Данные инклинометрии скважины используются для обеспечения бурения скважины в заданном направлении, при определении истинных глубин залегания геологических объектов, при построении карт и разрезов, когда для этих целей привлекаются каротажные и буровые материалы.
[64] Замер инклинометрии – точка, в котором измеряются параметры пространственного положения скважины (зенитный угол и магнитный азимут на определенной глубине по стволу).
[65] Пространственная интенсивность (пространственная кривизна) – величина, характеризующая степень искривления ствола (темп отклонения скважины от ее начального направления). Рассчитывается как отношение приращения угла искривления к расстоянию между точками замеров по оси скважины.
[66] Интенсивность набора зенитного угла – интенсивность искривления ствола скважины в вертикальной проекции.
[67] Интенсивность по азимуту – интенсивность искривления ствола скважины в горизонтальной проекции.
[68] Горизонтальный отход скважины – расстояние от устья скважины до точки замера в горизонтальной проекции.
[69] Отход скважины на Восток/Запад – расстояние от устья скважины до точки замера в горизонтальной проекции в направлении восток-запад.
[70] Отход скважины на Север/Юг – расстояние от устья скважины до точки замера в горизонтальной проекции в направлении сервер-юг.
[71] Общий отход – расстояние от устья скважины до текущего забоя скважины в горизонтальной проекции.
[72] Длина профиля скважины (отход вдоль траектории скважины) – длина кривой траектории скважины от устья скважины до точки замера в горизонтальной плоскости (Фиг. 4).
[73] Вертикальный разрез (вертикальная секция) – расстояние от устья скважины до точки замера в вертикальной плоскости, в котором построена вертикальная проекция. Данное значение может изменяться в зависимости от азимута вертикальной проекции.
[74] Азимут ствола (азимутальный угол) – угол между проекцией оси скважины на горизонтальную плоскость и определенным направлением (например, магнитный или истинный север).
[75] Зенитный угол – угол между осью скважины и вертикалью.
[76] Геонавигация (геологическая проводка скважины, well placement, geosteering – geological steering) представляет собой преднамеренное изменение положения ствола скважины в пласте, основанное на анализе геологической, геофизической информации и данных инклинометрии, поступающих в процессе бурения. Процесс геонавигации начинается до вскрытия целевого интервала. Вся подготовка к проводке должна быть завершена на этапе бурения транспортного ствола – секции, предшествующей горизонту, имеющей главной задачей обеспечение успешной геонавигации в целевом интервале. Обычно транспортный ствол представлен наклонно-направленной секцией. После выхода из транспортного ствола следующая важная задача – «посадка» скважины на кровлю целевого интервала (пласта) – часть пласта (или пласт), выбранный для строительства горизонтальной секции или горизонтального бокового ствола, с целью получить максимально продуктивную скважину.
[77] Для точного определения траектории горизонтальной секции или БГС необходимо использовать геологические цели, представляющие собой трехмерные объекты (точки в трехмерном пространстве, либо параллелепипеды), через которые должна пройти траектория для достижения оптимального положения горизонтального ствола скважины внутри целевого интервала.
[78] Следующим этапом является определение точек Ti:
[79] Т1 - точка пересечения ствола скважины и кровли целевого интервала;Т2 – первая точка горизонтальной части траектории, где достигается зенитный угол в 90 градусов. Если имеем дело с пологой траекторией, то Т2 определяется как точка, после которой отсутствуют значительные вариации в интенсивности искривления ствола; Т3 – (TD – Total Depth) - проектная глубина скважины. Представляет собой точку, в которой запланирована остановка бурения.
[80] Напряжение – это сила, приложенная к единице площади. Сжимающее напряжение положительное. На каждую плоскость действуют три напряжения – одно нормальное, два сдвиговых. Сопротивление горной породы нагружению определяется суммой напряжений в скелете и порового давления
[81] Деформация – изменение формы и размеров тела под действием внешних сил. Деформация также может быть нормальная и сдвиговая.
[82] Закон Гука – фундаментальных закон, количественно описывающий зависимость деформации от приложенной нагрузки.
[83] Упругие свойства породы – модуль Юнга, или жесткость, - отношение приложенной нагрузки к осевой деформации. Коэффициент Пуассона - отношение относительного поперечного сжатия к относительному продольному растяжению. Константа Био описывает эффективность давления флюида сопротивляться приложенной нагрузке. Существуют динамические и статические модули. Во время записи каротажа акустическая волна создает быстрые и малоамплитудные деформации породы, через волновое уравнение можно выразить динамические модули среды. Статические получают путем испытания керна в лаборатории путем медленного нагружения образцов до момента их разрушения; статические модули адекватнее характеризуют поведение породы.
[84] Прочность – максимальная нагрузка, которую может выдержать порода
[85] Разрушение – достижение предела упругости и неспособность материала выполнять свою инженерную функцию. Предел упругости – нагрузка, выше которой возникают пластические деформации (образование микротрещин, переупаковка зерен, смещение).
[86] Критерий разрушения Мора-Кулона – оценка предельных напряжений сдвига, которые выдерживает порода.
[87] Поровое давление – давление, которое пластовые флюиды оказывают на вмещающие их породы (для проницаемых пород). Пластовое давление в глинах (поры очень маленькие) – давление флюида в проницаемом интервале, находящемся в долговременном равновесии с глинами
[88] Гидростатическое давление – давление, создаваемое столбом жидкости в состоянии покоя
[89] Аномальное пластовое давление – давление в пласте, которое превышает нормальное гидростатическое, характерное для данной глубины
[90] Обрушения – разрушение породы из-за недостаточного удельного веса бурового раствора в скважине. Механика горных пород позволяет рассчитать начало образования вывалов/обрушений, однако непосредственное отделение этих кусочков породы от стенок и их падение внутрь скважины зависит от целого набора буровых параметров (производительность насосов, динамика изменения давления в скважине, механическое воздействие бурового инструмента во время проработок и шаблонировок, и т.д.)
[91] Поглощения – потеря бурового раствора в пласт ввиду превышения давления в скважине над минимальным горизонтальным напряжением. Бесконтрольные поглощения промывочной жидкости могут привести к полной потере циркуляции. Поглощения также возникают в трещиноватых коллекторах.
[92] В процессе строительства горизонтальной скважины или бокового горизонтального ствола возникает ряд проблем следующего характера. Самую большую проблему при необходимости точно расположить ствол скважины вызывают геологические неопределенности и погрешности измерений.
[93] Геологические неопределенности включают в себя:
- неопределенность положения структуры горизонта по глубине (Фиг. 5, поз. А). Определение структуры первоначально производится по сейсмическим данным, имеющим разрешающую способность порядка десятков метров. Даже при наличии уже пробуренных скважин мы не можем сказать абсолютно точно, где залегает та или иная структура - всегда возможны вариации по глубине.
- неопределенность структурного угла падения пласта (Фиг. 5, поз. Б);
- стратиграфическая неопределенность (Фиг. 5, поз. В).
Стратиграфическая неопределенность возникает вследствие того факта, что пласты редко бывают стратиграфически выдержанными. Если не учесть это, то при бурении скважины можно легко выйти за пределы целевого интервала;
- наличие разломов, линз, выклиниваний (Фиг. 5, поз. Г);
- латеральные или вертикальные изменения фаций;
- текущее положение контактов;
- геологические несогласованности, которые невозможно определить по сейсмическим данным.
[94] Погрешности измерений возникают при определении глубины, замерах инклинометрии и каротажа. Данные погрешности возникают ввиду множества причин: ошибки измерения бурильных труб, растяжение колонны под действием силы гравитации, тепловая деформация, метрологические ограничения инклинометров, неточная центрация прибора. Таким образом, может возникнуть ситуация, когда неопределенность замеров превзойдет мощность пласта, в котором необходимо провести скважину (Фиг. 6).
[95] Совместное негативное воздействие геологических неопределенностей и неопределенностей замеров ведут к тому, что геометрическое бурение не позволяет достичь целей скважины. Каждый метр горизонтального ствола, пробуренный вне целевого интервала – это потерянная инвестиция. Кроме того, любой выход за пределы коллектора означает бурение в слоях с другими геомеханическими свойствами, что может значительно повысить риски. Сложно переоценить значение геонавигации – по некоторым оценкам, 1 метр горизонтального ствола, пробуренный вне коллектора, выводит из разработки до 30 000 тонн углеводородов. Глинизированный пропласток толщиной в полметра не представляет собой никакой неприятности в вертикальной скважине, но может тянуться бесконечно при бурении горизонтальной секции параллельно пропластку. С другой стороны, успешное применение геонавигации может принести экономическую пользу, эквивалентную сотням миллионов долларов, например, опыт компании StatoilHydro, месторождение Troll [1].
[96] Исходя из вышесказанного, конечной задачей является создание метода объединения геонавигационной и геомеханической моделей в единую концепцию, позволяющую одновременно решать и задачи геологической проводки скважин и проблемы устойчивости ствола скважины. Комбинированная модель должна обладать возможностью работы в реальновременном режиме. При каждом изменении траектории скважины в целях геонавигации должен осуществляться пересчет окна буримости геомеханической составляющей модели.
[97] Рассмотрим рабочий процесс использования геомеханики и геологического сопровождения бурения скважины в том виде, в котором они применяются. Фактически, это две независимых процедуры, имеющие мало общих точек пересечения, несмотря на использования практически одних и тех же входных данных.
[98] Если разбить период строительства скважин на три основные фазы – «до бурения», «бурение», «после бурения», то геологическое сопровождение представлено на каждой из фаз. Схематично рабочий процесс представлен на Фиг. 7. На этапе «до бурения» основным результатом является построение предварительной модели геонавигации на основании данных, полученных в ранее пробуренных опороных скважинах.
[99] После начала бурения основной задачей является недопущение ситуации выхода за пределы целевого интервала. Решения принимаются строго в рамках геонавигационной дисциплины, без рассмотрения вопросов оптимизации траектории скважины в терминах максимизации проходки, снижения НПВ и уменьшения вероятности возникновения проблем из-за нестабильности ствола скважины.
[100] Теперь рассмотрим процесс геомеханического сопровождения бурения. Аналогично геонавигации процесс начинается на этапе «до бурения» с аудита данных и проведения предбурового 1D геомеханического моделирования на основании данных опорных скважин. После начала бурения основной задачей является круглосуточное геомеханическое сопровождение бурения, с целью минимизации повреждений пласта и улучшение качества ствола скважины. Данный этап включает в себя мониторинг и анализ механических параметров бурения, реальновременное обновление моделей порового давления, градиента давления гидроразрыва пласта и модели стабильности ствола скважины. После завершения бурения проводится обновление 3D геомеханической модели месторождения, используя информацию, полученную при строительстве новой скважины.
[101] Очевидно, что общепринятый подход, подразумевающий отдельное геонавигационное сопровождение бурения и изолированное геомеханическое сопровождение, обладает рядом слабых сторон.
[102] Во-первых, отсутствие междисциплинарного взаимодействия значительно снижает общую эффективность операций по строительству скважин. Например, могут возникнуть ситуации, когда плановый показатель по проходке внутри целевого интервала достигнут, но строительство скважины было произведено с выходом за плановые временные рамки. Из-за сегрегированного дисциплинарного подхода к процессу сопровождения могут возникать ситуации, когда оптимальные решения для геонавигационной и геомеханической дисциплин противоречат друг другу.
[103] Вторым негативным фактором разделения дисциплин является частичное «покрытие» процесса строительства всем спектром дисциплин – на первом этапе (до бурения) слабо используются навыки и экспертиза геонавигации, а на завершающем этапе отсутствует углубленная работа специалистов по геомеханике.
[104] Для изменения ситуации необходимо изменить подход к сопровождению бурения, перевести его в плоскость комплексного инженерно-технологического процесса, включающего в себя постоянную синхронизацию между геомеханикой и геонавигацией.
[105] Необходимо анализировать геомеханические и геонавигационные данные в рамках объединенной геомеханико-геонавигационной модели. Создание такого рода модели позволит решить следующие задачи:
- позволит инженерам, использующим объединенный подход, оптимизировать процесс бурения не только с точки зрения максимизации проходки внутри целевого интервала, но и со стороны минимизации НПВ, снижения аварийности, ускорения строительства;
- внедрить системы раннего оповещения об переходе в неблагоприятные условия бурения, например, переход из консолидированного песчаника в области с пониженной устойчивостью ствола.
[106] Далее описание осуществления заявленного решения будет идти с отсылками к Фиг. 8 и Фиг. 9. На Фиг. 8 представлена общая концептуальная схема выполнения заявленного способа.
[107] При комбинированном сопровождении бурения скважин в режиме реального времени одним из процессов, требующих регулярной обработки непрерывно обновляющихся данных и оперативного контроля со стороны вовлеченных специалистов, является верификации и анализ геолого-геофизической информации, поступающей в ходе бурения (LWD), и петрофизическая интерпретация этой информации для дальнейшего использования с целью геонавигации скважины. Легко заметить, что и для геомеханической, и для геонавигационной дисциплин исходными данными выступает практически одна и та же информация, за исключением данных керна.
[108] Как представлено на Фиг.9, на первом шаге (101) минимальными входными данными для реализации заявленного способа являются данные инклинометрии, данные ГИС и данные керна.
[109] Основная связь геомеханической и геонавигационной модели осуществляется через общий набор входных данных и данные плановой траектории. Любое изменение плановой траектории вызывает каскадные изменения, как в модели геологической проводки (изменение положения ствола скважины относительно реперных геологических пропластков), так и пересчет всех составляющих геомеханической модели - моделей порового давления, градиента давления гидроразрыва пласта и модели стабильности ствола скважины.
[110] Рассмотрим подробно связь между всеми составляющими геомеханической модели и плановой траекторией скважины, запланированной к бурению.
[111] Прежде всего рассмотрим более детально процесс геомеханического сопровождения бурения. Фактически, для получения модели устойчивости ствола скважины необходимо проделать ряд шагов:
- Расчет литостатического и пластового давлений;
- Расчет механических свойств пласта;
- Вычисление пластовых и околоскважинных напряжений.
[112] Возможность оценить пластовое давление по каротажам существует благодаря свойству глин уменьшать свою пористость экспоненциально с глубиной. В идеальном случае гидростатического градиента давления порового флюида мы будем иметь нормальный тренд уменьшения плотности глин с глубиной. В случае, если значения пористости отклоняются от нормального тренда естественно предположить, что мы имеем дело с отклонением пластового давления от нормали.
[113] Данный метод работает только для глин, потому что песчаники / известняки не проявляют подобных закономерностей уменьшения пористости с глубиной. Этим объясняется методология расчета тренда уменьшения пористости. Все вычисления должны проводиться только для чистых глинистых интервалов.
[114] Существует несколько полуэмпирических закономерностей для соотнесения значений каротажей и значений порового давления. Для каждого месторождения эти закономерности должны быть "подстроены" за счет изменения их коэффициентов.
[115] Чтобы обеспечить корректное соответствие моделей предсказания давления в разных скважинах всегда необходимо сравнивать рассчитанные кривые из разных скважин. В этом состоит процедура проверки качества, которая должна быть реализована для каждого важного этапа расчета. Пример схемы расчета пластового давления приведена на Фиг. 10
[116] Далее на этапе (102) осуществляется выбор одной или более опорной скважины для разработке начальной модели геологической проводки. Опорная скважина может быть вертикальной или наклонно-направленной. Она выбирается из пробуренных соседних скважин, свойства пласта в которых предполагаются схожими со свойствами в районе бурения. Пилотный ствол для горизонтальной скважины также может служить в качестве опорной скважины. На основании каротажных данных опорной скважины будут определяться геофизические свойства каждой прослойки пласта и прогноз свойств по всей длине горизонтальной скважины. Для выбора опорной скважины можно использовать межскважинную корреляцию и структурную карту по кровле целевого пласта. Корреляционная схема (пример представлен на рисунке Фиг. 11) позволяет оценить мощности пластов и их латеральную выдержанность для строящейся скважины, и скважин-кандидатов на роль опорной.
[117] Положение основных геологических маркеров в скважинах, окружающих фактическую (разрабатываемую), позволяют определить примерное ожидаемое изменение толщин ключевых пропластков в фактической скважине. Для полноты картины необходимо провести анализ по карте. Структурная поверхность кровли пласта строится на основе отбивок пласта в окружающих скважинах с использованием тренда сейсмики. Таким образом, мы объединяем результаты интерпретации сейсмических данных с интерпретацией каротажных данных. Из структурной карты мы можем почерпнуть информацию о падении либо росте пласта в направлении запланированного бурения, а также интенсивности изменения угла наклона пласта.
[118] Далее на шаге (103), определившись с выбором опорной скважины, осуществляется построение на основании полученных данных комбинированной геонавигационной модели, которая предназначена для отображения характеристик пород и прогнозирования положения ствола разрабатываемой скважины. На данном этапе необходимо распространить физические свойства пласта (естественная радиоактивность, пористость, сопротивление) на определенное расстояние в том направлении, в котором запланировано бурение фактической скважины. Как пример, возможно выполнение округления фактических данных каротажа ГК и анализ модели на интересующем интервале по TVD.
[119] На Фиг. 12 представлен пример полученной комбинированной модели за счет распространения свойств каждой точки каротажной кривой опорной скважины на интервал от 0 до 1000 метров по THL фактической скважины.
[120] Если перейти от осредненного каротажа к обычному, то модель несколько видоизменится, поскольку появятся дополнительные (промежуточные) значения каротажной кривой. Также будет необходимо понимать, какие пропластки оставлять в случае, если каротажная кривая содержит несколько тысяч точек, при разрешающей возможности отображения на экране не более 1024 линий (для разрешения High Definition). Для получения точных данных можно использовать следующий подход: задается определенный шаг по TVD и с этим шагом выбирается точка каротажа ГК, придается ей определенная расцветка и обрисовывается следующая линия геонавигационной модели. Данный процесс итеративно повторяется для всего заданного интервала по TVD, что в итоге дает модель, представленную на Фиг. 13.
[121] Далее на этапе (104) выполняют определение по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины на основании каротажных данных опорной скважины (или нескольких скважин). Плановая траектория будет использоваться на шаге (105) для построения синтетической каротажной кривой на основании построенной комбинированной модели.
[122] Синтетические или смоделированные каротажные кривые получаются путем переноса данных ГИС из ранее пробуренных скважин на траекторию скважины, запланированной к бурению. Подобный перенос учитывает стратиграфическое строение месторождения, наличие выклиниваний и утолщений пласта, региональные угол падения структуры пласта.
[123] Расчёт синтетической каротажной кривой происходит по следующему алгоритму:
Используются рассчитанные значения траектории фактической скважины;
В качестве начальной точки расчёта выбирается текущая точка фактической траектории;
Выбирается текущая точка и последующая;
Деление заданного интервала с заданным фиксированным шагом;
В качестве текущей точки выбирает первое значения поделённого отрезка;
Определение для данного значения величину TVDSS в данной точке, используя линейную интерполяцию по линейной траектории;
Определение показания смещения относительно начала координат по TVDSS из-за величин углов падения;
Если кривая существует в этом значении TVDSS, то определяется её значение, используя интерполятор, иначе для данного значения определяется недействительное число;
Если фиксируется достижение конца поделённого отрезка, то выполняется переход к пункту j), иначе в качестве текущего значения устанавливается следующее значение определенного интервала и выполняется переход к пункту f);
Если достигли конца значений траекторий, то возвращаем синтетическую кривую, иначе в качестве текущей точки берём следующую точку и переходим к пункту c).
[124] Далее рассмотрим более детально процесс расчета синтетической каротажной кривой.
[125] Сначала определяется кривая, для которой будем выполняться синтетическое моделирование (моделирование показаний приборов с данной каротажной кривой). На Фиг. 14 представлен пример отображения выбранной каротажной кривой относительно шкалы TVD. Для каждой точки кривой GK необходимо поставить точку кривой GK_Syn (синтетическая кривая GK) относительно шкалы THL. Искусственно созданному пику в 15 Gapi (оранжевый пропласток) на кривой GK (вертикальный график слева) соответствует пик на синтетической кривой в той точке по THL (горизонтальный), в которой «оранжевый» пропласток был пересечен плановой траекторией фактической скважины.
[126] Положение пика на синтетической кривой зависит от углов падения пласта, поскольку изменение набора углов приводит к изменению точки пересечения «оранжевого» пропластка фактической траекторией. Аналогичный процесс расчета производится по всем парам точек (GK, TVD) с получением пар точек (GK_Syn, THL). Если меняется угол падения пласта (например, в результате настройки модели на структурную поверхность), то меняется и синтетическая кривая, так как изменяются точки пересечения траектории и пластов.
[127] Таким образом, синтетическая кривая представляет собой каротажную кривую опорной скважины, пересчитанную из TVD в THL, с учетом плановой траектории фактической скважины и углов падения пласта геонавигационной модели. Следующим шагом является переход к этапу бурения и сопоставления фактического каротажа с синтетическим.
[128] После получения синтетических кривых по геонавигационной модели можно переходить к построению геомеханической модели - модели устойчивости ствола скважины (этап 106), необходимой для определения плановой траектории (этап 107). В конечном итоге, необходимо получить плановую траекторию, оптимальную как в терминах целевого интервала, так и в терминах устойчивости ствола скважины.
[129] Для этого выполняют следующие шаги:
- Расчет литостатического и пластового давлений;
- Расчет механических свойств породы и пластовых и околоскважинных напряжений;
- Расчет устойчивости ствола скважины.
[130] Для расчета литостатического давления используются плотность вдоль разреза, а также следующая информация:
1) Высота столба воздуха в местоположении устья скважины
2) Глубина моря в местоположении устья скважины
Расчет ведется по формуле:
[131] Тренд нормального уплотнения горных пород рассчитывается в четыре последовательных шага:
1) Отбивка (определение) интервалов глин, находящихся предположительно при гидростатическом давлении.
2) Проведение гладкой линии через отбитые интервалы на кривых акустического каротажа и каротажа сопротивления.
3) Проведение глобальной линии (нескольких линий) тренда по участкам, выявленным на шагах 1 и 2.
4) Проверка методом сверки результатов с расчетами из других скважин этого месторождения.
[132] Отбивка интервалов глин производится через определение уровня гамма-каротажа, для всех интервалов с значением гамма-каротажа выше порогового, считаем, что интервал является глинистым. Сглаженные значения по выделенным глинистым интервалам получаются применением простого арифметического усреднения со скользящим окном.
[133] Существует множество зависимостей для расчета порового давления по каротажам, получаемым в процессе бурения. Любые зависимости необходимо откалибровать, то есть проверить их способность качественно определять пластовое давление на уже пробуренных скважинах, где присутствуют прямые замеры и другая калибровочная информация. Наиболее часто используются следующие формулы.
[134] Формула Итона (рассчитывается как по акустическому каротажу):
[135] Формула Итона (по каротажу сопротивлений):
[136] Формула Бауэрса (рассчитывается по акустическому каротажу).

где
 – вертикальное напряжение
– вертикальное напряжение
 – скорость продольной волны по каротажу
– скорость продольной волны по каротажу
 – скорость в мелкозалегающих отложениях
– скорость в мелкозалегающих отложениях
[137] Видоизменим формулы 1), 2), 3) с учетом того факта, что в них используются синтетические каротажи, построенные на основании данных ГИС из ранее пробуренных скважин и проектной траектории скважины, запланированной к бурению. После подстановки формулы для расчета синтетического каротажа в фомулы 1), 2), 3) получаем следующие зависимости:
1) Формула Итона для акустического каротажа
Пластовое давление = F (плановой траектории, акустического каротажа опорной скважины, вертикального напряжения, константы);
2) Формула Итона для каротажа сопротивлений
Пластовое давление = F (плановой траектории, каротажа сопротивлений опорной скважины, вертикального напряжения, константы);
3) Формула Бауэрса
Поровое сопротивление = F (плановой траектории, акустического каротажа опорной скважины, вертикального напряжения, константы).
[138] При возникновении ситуации, когда буровое окно, рассчитанное в геомеханической модели, для данной плановой траектории, оптимальной в терминах геонавигационной модели, слишком узко или несет повышенные риски для процесса строительства скважины, необходимо изменять плановую траекторию, чтобы обеспечить максимальную проходку скважины внутри целевого интервала с устойчивостью ствола скважины.
[139] После начала бурения (этап 108), при поступлении новой порции информации (инклинометрия, каротажные данные, буровые параметры) происходит обновление комбинированной геомеханико-геонавигационной модели (этап 109). Рассмотрим этот процесс подробнее.
[140] Рассмотрим изменение геонавигационной составляющей модели с учетом поступающих параметров.
[141] После начала бурения и получения первых фактических данных ГИС, геонавигация производится за счет изменения геометрии пласта. Самый часто встречаемы случай – редактирование угла падения пласта. При этом угол меняется для определенного интервал по THL, и эти изменения не затрагивают часть синтетических расчетов, расположенных левее по шкале горизонтального отхода от устья.
[142] Продолжим рассмотрение модели, построенной ранее. При получении дополнительных каротажных данных, например, была пробурена очередная трубка, что дает дополнительно 10 метров каротажной кривой GK. Необходимо настроить синтетические расчеты на поступившие каротажные данные. Исходный вариант их сопоставления представлен на Фиг. 15.
[143] Для изменения формы синтетических расчетов, необходимо изменить угол падения пласта. Необходимо учитывать, что погрешность построения структурных карт может достигать десятков метров по вертикали и, соответственно, данные каротажа строящейся скважины должны иметь приоритет в плане использования в качестве точки отсчета.
[144] На Фиг. 16 представлен пример, при котором выполняется увеличение угла падения пласта до 0.3 градуса и добавление угла падения в 0.6 градуса на отметке в 937 м по THL. На примере видно, что имеет место небольшое расхождение между фактическим и синтетическим каротажами в интервале 937 – 1007 метров по THL. Внесем изменение угла с 0.6 до 0.9 градусов, при котором происходит факт совпадение синтетического и фактического каротажей. Это показывает определение для данного отрезка THL мы положение ствола скважины в пласте. Далее рассмотрим тот интервал, в котором оказался ствол скважины в данный момент.
[145] На примере видно, что в интервале 937 – 1007 метров по THL ГК растет, таким образом, ствол скважины приближается к глинизированным пропласткам, и необходимо скорректировать действия буровой команды так, чтобы не выйти за пределы целевого интервала. При поступлении новых данных продолжается настройка синтетической кривой на фактическую, меняя угол падения в точках по THL. После достижения требуемого совпадения между смоделированным и фактическим каротажами на новом интервале по THL формируется рекомендации по бурению для следующего интервала.
[146] По мере поступления каротажа в реальном времени (ГК, плотностной, акустический каротажи) автоматически пересчитываются упруго-прочностные свойства пласта, в зависимости от текущей траектории и других параметров обновляется и расчет пластовых напряжений. Данные кавернометрии во время бурения позволяют оценить, насколько хорошо модель устойчивости описывает текущую ситуацию.
[147] В случае разночтений модельного и фактического поведения скважины проводится анализ причин и корректировка модели. Помимо данных кавернометрии о состоянии стенок скважины говорят следующие параметры: отклонение/соответствие трендам увеличения веса бурового инструмента с глубиной, поведение момента, поверхностного и затрубного давления. Более того, прямую информацию о том, что происходит в скважине, можно получить, анализируя шлам.
[148] Обрушениям, например, характерны угловатые обломки, а бурению на депрессии соответствуют длинные плоские пластинки. В то же время пристально ведется наблюдение за уровнем жидкости в емкостях на предмет притоков или поглощений раствора. Вся эта информация учитывается при обновлении расчетов устойчивости вскрытого интервала для повышения предиктивности модели, на основании которой составляются рекомендации для бурения следующих пластов.
[149] После обновления комбинированной модели происходит поиск оптимальной траектории. Траектория при бурении следующего интервала должна по-прежнему находиться в границах целевого пласта (ограничение со стороны геонавигационной модели), но в то же время должна минимизировать буровые риски (ограничение со стороны геомеханики). Каждое изменение в предполагаемой траектории вызывает каскадные изменения и пересчет в модели устойчивости ствола скважины.
[150] На Фиг. 17 показан пример определения процесс расчета механических свойств и напряжений. Основными входными данными являются:
- Скважина (траектория), запланированная к бурению;
- Синтетические каротажные данные;
- Дискретная кривая фаций (опционально).
[151] Динамические упругие модули (жесткость и коэффициент Пуассона) рассчитываются по следующим формулам:
где
 – плотностной каротаж
– плотностной каротаж
 – скорости продольной и поперечной волны по акустическому каротажу.
– скорости продольной и поперечной волны по акустическому каротажу.
[152] Учитывая, что статические упругие параметры адекватнее характеризуют поведение породы при бурении, а также хорошо коррелируют с динамическими свойствами, определенными по каротажу, далее применяются корреляции, разработанные для данного месторождения, региона.
[153] Прочностные характеристики (прочность на одноосное сжатие, угол внутреннего трения, предел прочности на разрыв) рассчитываются на основе корреляций-зависимостей от различных характеристик среды, таких как глинистость, пористость, плотность и пр. Для каждого региона вырабатываются независимо.
[154] Расчет дальних горизонтальных напряжений производится на основе уравнения пороупругой среды. Напряжения всегда зависят от конкретной траектории скважины, в частности, от вертикали:

где,
 – константа Био
– константа Био
 – пластовое давление
– пластовое давление
 – коэффициент Пуассона
– коэффициент Пуассона
 – жесткость среды
– жесткость среды
 – тектонические деформации, свойственные региону, пласту
– тектонические деформации, свойственные региону, пласту
[155] Константа Био описывает эффективность давления флюида сопротивляться приложенной нагрузке. Зачастую равна единице, для отложений с очень жесткими породами, на глубине, превышающей ~4 км, может быть меньше единицы, рассчитывается из каротажа пористости.
[156] Учитывая, что во время бурения мы замещаем породу на столб жидкости, происходит перераспределение напряжений и появление группы новых: радиальное, аксиальное, тангенциальное напряжения. Околоскважинные напряжения находятся в прямой зависимости от дальних пластовых напряжений, а также от близости к скважине точки, где производится расчет, от нахождения самой скважины и азимутального расположения относительно направления действия максимального горизонтального напряжения. Расчет околоскважинных напряжений для скважины (траектория которой проходит вдоль направления одного из главных напряжений) имеет вид (Кирш):
 – радиальное околоскважинное напряжение
– радиальное околоскважинное напряжение
 – тангенциальное околоскважинное напряжение
– тангенциальное околоскважинное напряжение
 – осевое околоскважинное напряжение
– осевое околоскважинное напряжение
 ,
, ,
,  – сдвиговое околоскважинное напряжение в различных направлениях
– сдвиговое околоскважинное напряжение в различных направлениях
 ,
,  – дальние пластовые горизонтальные напряжения
– дальние пластовые горизонтальные напряжения
– коэффициент Пуассона
 – радиальное направление, радиус скважины
– радиальное направление, радиус скважины
 – угол до направления действия максимального горизонтального напряжения.
– угол до направления действия максимального горизонтального напряжения.
Околоскважинные напряжения непосредственно определяют разрушатся ли стенки скважины.
[157] Суть анализа устойчивости стенок ствола в следующем: в точках, где концентрация напряжений превышает прочность породы, будут наблюдаться обрушения; в точках, где напряжения настолько малы, что становятся растягивающими (математически это означает отрицательными) наблюдаются трещины. В большинстве случаев используется критерий разрушения Мора-Кулона. Модель разрушения Мора-Кулона позволяет получить соотношение между двумя главными напряжениями в момент разрушения породы. Модель не накладывает ограничений на направления напряжений и может быть использована для резервуаров, находящихся как в режиме растяжения, так и сжатия. Предполагается, что вертикальное напряжение является одним из главных напряжений.
[158] Таким образом, неустойчивость, риски НГВП и поглощений раствора можно выразить как функцию от следующих параметров:
- Обвалообразование = F (траектория скважины, дальние пластовые напряжения, пластовое давление, околоскважинные напряжения, давление в скважине, прочность породы на сжатие, коэффициент Пуассона);
- Нефтегазоводопроявления = F (траектория скважины, пластовое давление, давление в скважине, проницаемость пласта);
- Поглощения и создание трещины гидроразрыва = F (траектория скважины, пластовые и околоскважинные напряжения, пластовое давление, давление в скважине, прочность породы на разрыв).
[159] Результатом работы данного набора алгоритмов является расчет минимального давления для предотвращения обрушения ствола скважины и максимального давления для предотвращения гидроразрыва. Расчетные кривые давлений позволяют определить окно веса бурового раствора, а также выявить интервалы нестабильности и возможной потери циркуляции.
[160] Основными результатами модели являются четыре величины:
- Градиент порового давления;
- Градиент начала поглощений;
- Градиент обрушений;
- Градиент гидроразрыва.
[161] Данный этап является завершающим в рабочей цепочке геомеханических расчетов и включает в себя результаты всех ранее перечисленных шагов. Расчет устойчивости стенки ствола скважины позволяет инженеру получить детальное представление о распределении напряжений вокруг ствола скважины. Результаты расчетов позволяют определить оптимальное окно веса бурового раствора и интервалы нестабильности, определить наилучший азимут и зенитный угол скважины в наиболее неустойчивых пластах, оптимизировать схему обсадных колонн.
[162] Применение результатов геомеханических расчетов позволяет нивелировать негативные факторы, связанные с бурением через зоны АВПД или низким градиентом гидроразрыва пласта, низкой устойчивостью стенок скважины, проседанием пластов, наведенной сейсмоактивностью, проходкой по трещиноватым коллекторам, пескопроявлением при разработке.
[163] На Фиг. 18 представлен общий вид системы (200), предназначенной для реализации заявленного способа. В общем случае под системой (200) понимается также вычислительное устройство, например, персональный компьютер, ноутбук, сервер, мейнфрейм, смартфон, планшет и т.п.
[164] Система (200) содержит один или более процессоров (201), осуществляющих заданную обработку данных. Оперативную память (202), содержащую исполняемые процессором машиночитаемые команды, реализующие заявленный способ (100). Средство постоянного хранения данных (203), представляющее собой, например, жесткий диск (HDD), твердотельный накопитель (SSD), носитель на флэш-памяти, оптические диски (CD, DVD, Blue-Ray) и т.п.
[165] Система (200) содержит также набор интерфейсов (204) для подключения различных устройств, например, USB, USB-C, Micro-USB, PS/2, COM, LPT, FireWire, Lightning, Jack-audio и т.п.
[166] В качестве средств В/В (205) может использоваться: клавиатура, динамики, дисплей, сенсорный дисплей, трекбол, манипулятор мышь, световое перо, стилус, тачпад, проектор, джойстик, интерфейс преобразования голосовых команд, нейро-гарнитуры и т.п.
[167] Средство сетевого взаимодействия (206) обеспечивает прием и передачу информации по сетевым протоколам. В качестве таких средств может использоваться Ethernet карта, Wi-Fi модуль, NFC модуль, IrDa, Bluetooth, BLE, модуль спутниковой связи и т.п. С помощью средств (206) реализуется обеспечения обмена данными посредством сети Интернет, Интранет, ЛВС и т.п.
[168] Система (200) может получать информацию для планирования геонавигации из множества внешних источников и может представлять собой облачный сервер для расчетов каротажной информации на основе синтетических расчетов. Данные в систему (200) могут передаваться с помощью WITSML (Wellsite Information Transfer Standard Markup Language) протокола, либо через почтовый сервер. На данный момент самым распространенным форматом передачи данных с буровой в нефтегазовой сфере является WITSML – это стандарт, разработанный компанией Energistics. В настоящее время в сферу интересов Energistics входят практически все области нефтегазовых знаний – от петрофизики и геофизики до управления добывающим активом, от разведки до бурения. WITSML – стандартный язык разметки для передачи скважинных данных. Основной целью создания языка являлась попытка получить бесперебойный поток информации между оператором и сервисными компаниями, в целях уменьшения времени на принятие решений при строительстве скважин. Наличие интернета позволяет наладить удаленное сопровождение бурения скважин вне зависимости от расстояния между буровой и геологом.
[169] Представленное в настоящих материалах описание реализации заявленного решения предназначено для толкования предпочтительных способов его осуществления и не должно трактоваться как ограничивающее иные, частные варианты реализации заявленного решения, которые не выходят за объем испрашиваемой правовой охраны, и являются очевидными для технического специалиста данной области техники.
Заявленное решение относится к способам и системам компьютерной обработки специализированных данных для обеспечения процесса сопровождения бурения скважин. Техническим результатом является повышение точности моделирования процесса проводки скважины в рамках целевого интервала с контролем устойчивости ствола скважины. Заявленный способ комбинированного сопровождения процесса бурения скважины заключается в выполнении этапов, на которых: получают входные данные разрабатываемой скважины, включающие в себя по меньшей мере данные инклинометрии, данные ГИС и данные керна; получают каротажные данные по меньшей мере одной опорной скважины; формируют на основании упомянутых входных данных и каротажных данных по меньшей мере одной опорной скважины комбинированную модель, отображающую характеристики пород и прогнозирование положения ствола разрабатываемой скважины; определение по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины на основании каротажных данных по меньшей мере одной опорной скважины; выполняют расчет по меньшей мере одной синтетической каротажной кривой на основании упомянутой комбинированной модели и по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины; выполняют построение предварительной модели устойчивости ствола скважины, на основании определенной по меньшей мере одной траектории разрабатываемой скважины и рассчитанной по меньшей мере одной синтетической кривой; определяют на основании построенной предварительной модели устойчивости ствола скважины плановую траекторию, обеспечивающую максимальную проходку скважины внутри целевого интервала и устойчивость ствола скважины; получают параметры в процессе бурения разрабатываемой скважины, характеризующие инклинометрию, ГИС данные и буровые параметры; выполняют обновление упомянутой комбинированной модели и осуществляют контроль процесса разрабатываемой скважины на основании обновленной комбинированной модели. 2 н. и 5 з.п. ф-лы, 18 ил.
1. Способ комбинированного сопровождения процесса бурения скважины, содержащий этапы, на которых:
- получают входные данные разрабатываемой скважины, включающие в себя по меньшей мере данные инклинометрии, данные ГИС и данные керна;
- получают каротажные данные по меньшей мере одной опорной скважины;
- формируют на основании упомянутых входных данных и каротажных данных по меньшей мере одной опорной скважины комбинированную модель, отображающую характеристики пород и прогнозирование положения ствола разрабатываемой скважины;
- определение по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины на основании каротажных данных по меньшей мере одной опорной скважины;
- выполняют расчет по меньшей мере одной синтетической каротажной кривой на основании упомянутой комбинированной модели и по меньшей мере одной плановой траектории направления бурения разрабатываемой скважины;
- выполняют построение предварительной модели устойчивости ствола скважины, на основании определенной по меньшей мере одной траектории разрабатываемой скважины и рассчитанной по меньшей мере одной синтетической кривой;
- определяют на основании построенной предварительной модели устойчивости ствола скважины плановую траекторию, обеспечивающую максимальную проходку скважины внутри целевого интервала и устойчивость ствола скважины;
- получают параметры в процессе бурения разрабатываемой скважины, характеризующие инклинометрию, ГИС данные и буровые параметры;
- выполняют обновление упомянутой комбинированной модели и осуществляют контроль процесса разрабатываемой скважины на основании обновленной комбинированной модели.
2. Способ по п.1, характеризующийся тем, что в ходе процесса бурения разрабатываемой скважины пересчитывают устойчивость ствола скважины на основании получаемых буровых параметров.
3. Способ по п.2, характеризующийся тем, что дополнительно используют информацию о наличии трещин в пласте.
4. Способ по п.1, характеризующийся тем, что при обновлении комбинированной модели геонавигации проверяют положение разрабатываемой скважины в пределах целевого пласта.
5. Способ по п.1, характеризующийся тем, что выбор опорной скважины осуществляется за счет межскважинной корреляции и структурной карты по кровле целевого пласта.
6. Способ по п.1, характеризующийся тем, что предварительная модель устойчивости ствола скважины строится на основании параметров пластового давления, градиента гидроразрыва пласта, механических свойств породы и напряжений.
7. Система комбинированного сопровождения процесса бурения скважины, содержащая по меньшей мере один процессор и по меньшей мере одно средство памяти, хранящее машиночитаемые инструкции, которые при их выполнении процессором реализуют способ по любому из пп. 1-6.
| СИСТЕМА, СПОСОБ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ С КОМПЬЮТЕРНОЙ ПРОГРАММОЙ ДЛЯ ПРОГНОЗИРОВАНИЯ ГЕОМЕТРИИ СКВАЖИНЫ | 2011 |
|
RU2560462C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОТОБРАЖЕНИЯ ДАННЫХ ДИАГРАММЫ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ СКВАЖИНЫ И ВСПОМОГАТЕЛЬНЫХ ДАННЫХ ДЛЯ ИХ ЗАПИСИ И ИНТЕРПРЕТАЦИИ | 2002 |
|
RU2305184C2 |
| Приводное приспособление для механизма, развертывающего изображение кривых по линии в регистрирующих приборах | 1933 |
|
SU37766A1 |
| УПРАВЛЕНИЕ РАЗРАБОТКОЙ СТВОЛА СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ РАСЧЁТОВ НЕОПРЕДЕЛЁННОСТИ | 2013 |
|
RU2643057C2 |
| Дверная накладка-замок | 1929 |
|
SU13660A1 |
| US 20090205867 A1, 20.08.2009. | |||

