Область техники
[001] Настоящее изобретение относится к автоматизированному управлению операцией в стволе скважины для добычи углеводородов из подземных пластов.
Уровень техники
[002] Бурение для добычи углеводородов, таких как нефть и газ, как правило, заключается в работе бурового оборудования на подземных глубинах, которые могут достигать тысяч футов от поверхности земли. Такая труднодоступная удаленность скважинного бурового оборудования в сочетании с непредсказуемыми условиями эксплуатации в скважине и вибрационными помехами бурения создает многочисленные проблемы для точного управления траекторией ствола скважины. Зачастую эти проблемы осложняются наличием соседних стволов скважин, иногда в непосредственной близости друг от друга, что ограничивает допуск на отклонение направления бурения. Операции бурения, как правило, получают измерения от скважинных датчиков, расположенных на компоновке низа бурильной колонны (КНБК) или вблизи неё, для выявления различных условий, связанных с бурением, таких как положение и угол траектории ствола скважины, технические характеристики горной породы, давление, температура, акустика и/или радиация. Такие данные измерений датчика, как правило, передаются на поверхность, где люди-операторы анализируют данные для регулирования внутрискважинного бурового оборудования. Однако измерения датчика могут быть неточными, запаздывающими или редкими, что снижает эффективность использования таких измерений. Часто при управлении операцией бурения человеку-оператору остается использовать наиболее вероятные оценки траектории ствола скважины.
Краткое описание чертежей
[003] На фиг. 1 проиллюстрирован пример реализации по меньшей мере участка системы ствола скважины при осуществлении операции внутри ствола скважины.
[004] На фиг. 2A и 2B проиллюстрированы примеры модели динамики компоновки низа бурильной колонны (КНБК) с использованием системы сосредоточенной массы.
[005] На фиг. 3 проиллюстрирован пример маршрута обработки результатов измерений датчика для уточнения модели динамики КНБК.
[006] На фиг. 4A и 4B проиллюстрированы примеры роста неопределённости для расчётной траектории ствола скважины.
[007] На фиг. 5 проиллюстрирована блок-схема типового процесса управления операцией бурения ствола скважины, который использует одну или несколько моделей неопределённости траектории ствола скважины для управления операцией бурения и измерениями датчика, которые выполняются по мере необходимости.
[008] На фиг. 6 проиллюстрирована блок-схема типового процесса 600 прогностического управления КНБК на основании компьютерной модели с использованием неопределённости расчётной траектории ствола скважины.
[009] На фиг. 7 проиллюстрирована блок-схема типового процесса определения неопределённости расчётной траектории ствола скважины.
[0010] На фиг. 8A проиллюстрирована блок-схема типового процесса осуществления управления измерением искривления ствола скважины, выполняемым по мере необходимости, которое использует одну или несколько моделей неопределённости траектории ствола скважины для определения того, стоит ли выполнять измерение искривления ствола скважины.
[0011] На фиг. 8B проиллюстрирована блок-схема типового процесса управления КНБК на основании одной или нескольких моделей неопределённости траектории ствола скважины.
[0012] На фиг. 9 проиллюстрирована блок-схема типового процесса определения неопределённости расчётной траектории ствола скважины и определения входного управляющего воздействия на КНБК и
[0013] На фиг. 10 проиллюстрирована блок-схема примера компьютерной системы, согласно которой могут работать некоторые примеры.
Подробное описание изобретения
[0014] В целом данное раскрытие изобретения описывает автоматизированное управление и контроль операций бурения ствола скважины, делая заключение о реальной траектории ствола скважины на основании результатов измерений, сделанных с помощью скважинных датчиков. В частности, данное раскрытие изобретения описывает технологии, которые определяют уточнённые меры неопределённости для расчётной траектории ствола скважины. Мера неопределенности может быть выведена из модели динамики КНБК и оценок дисперсии помех. Уточнённые меры неопределённости могут дать возможность более точно отслеживать реальную траекторию ствола скважины и дать возможность осуществлять бурение с меньшими пределами погрешности. Различные аспекты операции бурения могут управляться на основании более совершенных расчётов неопределённости ствола скважины. Например, процесс принятия решений и алгоритмы управления для проведения измерений высокой точности и коррекции управления по автоматизированной механической скорости проходки скважины могут выполняться на основании расчётной неопределённости.
[0015] В некоторых примерах уточнённая мера неопределённости может быть использована системой бурения для определения соответствующих моментов времени для проведения высокоточных измерений датчика. В частности, если неопределённость ствола скважины возрастает до значений больше, чем заданное предельное значение неопределённости, тогда для более точного определения траектории ствола скважины может быть выполнено высокоточное измерение. Дополнительно или в качестве альтернативы в некоторых примерах на основании вычисленной неопределённости ствола скважины управляющие алгоритмы могут быть разработаны с возможностью автоматического управления скважинным оборудованием и инструментами, такими как компоновка низа бурильной колонны (КНБК), таким образом, чтобы бурение выполнялось эффективным и экономически выгодным образом.
[0016] В общем виде реализации настоящего изобретения реализованный компьютером способ управления компоновкой низа бурильной колонны (КНБК) в стволе скважины включает определение модели динамики КНБК, определение расчётной траектории ствола скважины на основании модели динамики КНБК и определение неопределённости расчётной траектории ствола скважины.
[0017] Другие основные варианты реализации настоящего изобретения включают соответствующие компьютерные системы, инструментальные средства и компьютерные программы, записанные на одно или несколько компьютерных устройств хранения данных, каждое из которых выполнено с возможностью выполнения действий по реализации способов настоящего изобретения. Система одного или более компьютеров может быть выполнена с возможностью выполнения операций для выполнения указанных действий. Одна или несколько компьютерных программ могут быть выполнены с возможностью выполнения конкретных операций или действий благодаря включению команд, которые при выполнении их устройством обработки данных побуждают это устройство выполнять указанные действия.
[0018] Первый аспект настоящего изобретения, который может быть соединён с любым общим вариантом реализации настоящего изобретения, включает определение того, что неопределённость расчётной траектории ствола скважины удовлетворяет предельному значению неопределённости; определение того, что измерение датчика следует принимать, исходя из значения неопределённости расчётной траектории ствола скважины, удовлетворяющего предельному значению неопределённости; и осуществление управляющих действий для проведения высокоточного измерения в стволе скважины.
[0019] Во втором аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение неопределённости расчётной траектории ствола скважины включает определение расчётной дисперсии помех для модели динамики КНБК, определение дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины на основании расчётной дисперсии помех и определение взвешенной комбинации дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины.
[0020] В третьем аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение неопределённости расчётной траектории ствола скважины дополнительно включает вычитание дисперсии расчётных помех датчика из взвешенной комбинации дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины.
[0021] В четвёртом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение расчётной дисперсии помех для модели динамики КНБК включает определение расчётной дисперсии по меньшей мере одного из вибрационных помех или помех датчика.
[0022] В пятом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение расчётной дисперсии помех для модели динамики КНБК включает использование автоковариационного алгоритма метода наименьших квадратов.
[0023] Шестой аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение предельного значения неопределённости на основании по меньшей мере одного из: проектной траектории ствола скважины, плана окружающих стволов скважин или средств по расчёту механической скорости проходки скважины с использованием КНБК.
[0024] В седьмом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение того, что измерение датчика следует принимать, дополнительно исходя из оптимальных затрат на проведение измерения датчиком и на скорость проходки скважины с использованием КНБК.
[0025] В восьмом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, осуществление действий по управлению для проведения измерения датчиком включает получение высокоточного измерения по меньшей мере от одного из инклинометра или магнитометра.
[0026] Девятый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение того, что измерение датчика доступно, а снижение неопределённости расчётной траектории ствола скважины основано на измерении датчика.
[0027] Десятый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, включает уточнение модели динамики КНБК на основании результата измерения датчика.
[0028] Одиннадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение входного управляющего воздействия на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины, и бурение ствола скважины в соответствии с определённым входным управляющим воздействием на КНБК.
[0029] Двенадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение уровня точности для измерения датчика, которое следует принимать, исходя из анализа совместимости затрат, связанных с различными уровнями точности измерения и значений неопределённости расчётной траектории ствола скважины, связанных с различными уровнями точности измерения.
[0030] Тринадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение частоты измерений датчика на основании по меньшей мере одного из проектной информации о стволе скважины, информации о затратах, неопределённости траектории ствола скважины или измерений датчика.
[0031] Четырнадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение неопределённости расчётной траектории ствола скважины посредством получения средневзвешенной величины значений неопределённости положения ствола скважины в различных географических направлениях.
[0032] В пятнадцатом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение входного управляющего воздействия на КНБК, включает определение по меньшей мере одного из: управления первым углом изгиба, управления вторым углом изгиба, управления первым пакером или управления вторым пакером.
[0033] В шестнадцатом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение входного управляющего воздействия на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины, включает определение входного управляющего воздействия на КНБК, которое максимально увеличивает скорость проходки скважины с использованием КНБК с учётом неопределённости расчётной траектории ствола скважины, удовлетворяющей предельному значению неопределённости.
[0034] В семнадцатом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение модели динамики КНБК включает приведение к линейному виду нелинейной модели динамики КНБК для эксплуатационного режима выполнения операции с использованием КНБК.
[0035] В других общих вариантах реализации настоящего изобретения технологии (например, способы, системы и аппаратные средства) управления компоновкой низа бурильной колонны (КНБК) в стволе скважины включают определение модели динамики КНБК, определение расчётной траектории ствола скважины на основании модели динамики КНБК, определение неопределённости расчётной траектории ствола скважины, определение входного управляющего воздействия на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины, и бурение ствола скважины в соответствии с определённым входным управляющим воздействием на КНБК.
[0036] В первом аспекте, который может быть соединён с любым из общих вариантов реализации настоящего изобретения, определение входного управляющего воздействия на КНБК включает определение по меньшей мере одного из: управления первым углом изгиба, управления вторым углом изгиба, управления первым пакером или управления вторым пакером.
[0037] Во втором аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение входного управляющего воздействия на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины, включает определение управляющего воздействия на КНБК, которое максимально увеличивает скорость проходки скважины с использованием КНБК с учётом неопределённости расчётной траектории ствола скважины, удовлетворяющей предельному значению неопределённости.
[0038] В третьем аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение неопределённости расчётной траектории ствола скважины включает определение расчётной дисперсии помех для модели динамики КНБК, определение дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины на основании расчётной дисперсии помех и определение взвешенной комбинации дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины.
[0039] В четвёртом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение неопределённости расчётной траектории ствола скважины дополнительно включает вычитание дисперсии расчётных помех датчика из взвешенной комбинации дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины.
[0040] В пятом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение расчётной дисперсии помех для модели динамики КНБК включает определение расчётной дисперсии по меньшей мере одного из вибрационных помех или помех датчика.
[0041] В шестом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение расчётной дисперсии помех для модели динамики КНБК включает использование автоковариационного алгоритма метода наименьших квадратов.
[0042] Седьмой аспект настоящего изобретения, который может быть соединён с любым общим вариантом реализации настоящего изобретения, дополнительно включает определение того, что неопределённость расчётной траектории ствола скважины удовлетворяет предельному значению неопределённости; определение того, что необходимо высокоточное измерение, исходя из значения неопределённости расчётной траектории ствола скважины, удовлетворяющего предельному значению неопределённости, и осуществление управляющих действий для проведения высокоточного измерения в стволе скважины.
[0043] Восьмой аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение предельного значения неопределённости на основании по меньшей мере одного из: проектной траектории ствола скважины, плана окружающих стволов скважин или средств по расчёту механической скорости проходки при бурении для КНБК.
[0044] В девятом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, определение того, что должно быть проведено высокоточное измерение датчиком, дополнительно основано на оптимальных затратах на проведение высокоточного измерения датчиком и на скорость проходки скважины с использованием КНБК.
[0045] В десятом аспекте настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, осуществление управления для проведения высокоточного измерения датчиком включает приём измерения по меньшей мере от одного из инклинометра или магнитометра.
[0046] Одиннадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает определение того, что высокоточное измерения датчика доступно, а снижение неопределённости расчётной траектории ствола скважины основано на высокоточном измерении датчика.
[0047] Двенадцатый аспект настоящего изобретения, который может быть соединён с любым из предшествующих аспектов, дополнительно включает уточнение модели динамики КНБК на основании высокоточного измерения датчика.
[0048] Различные варианты реализации системы управления бурением ствола скважины в соответствии с настоящим раскрытием изобретения могут не содержать, содержать одну или несколько из следующих особенностей. Например, система может повышать точность получения реальной траектории ствола скважины на основании измерений датчика. В частности, технологии, описанные в настоящем документе, могут обеспечивать уточнённые измерения неопределённости для расчётной траектории ствола скважины. Уточнённые измерения неопределённости могут дать возможность более точно оценивать риск потенциальных отклонений от проектной траектории ствола скважины. Это может быть использовано в различных целях, таких как более совершенный анализ предотвращения сближения стволов скважин при наклонно направленном бурении.
[0049] Реальная траектория ствола скважины не может быть точно известной во время бурения по различным причинам, включая неизвестные условия бурения и вибрационные помехи, которые могут отклонять буровое долото в сторону от намеченной траектории. Во многих случаях, чем дольше бурение производится без проведения высокоточных измерений, тем больше становится неопределённость траектории ствола скважины. Как правило, уменьшение неопределённости ствола скважины требует более частых измерений для тщательного отслеживания реальной траектории ствола скважины. Однако проведение высокоточных измерений часто требует замедления или прекращения операции бурения, что может увеличивать затраты и вызывать задержки бурения.
[0050] Технологии, описанные в настоящем документе, могут обеспечивать более точную модель роста неопределённости положения ствола скважины, которая может дать возможность более тщательного отслеживания действительного отклонения траектории ствола скважины. Более строгие оценки неопределённости положения ствола скважины снижают необходимость проведения высокоточных измерений и дают возможность более эффективного использования КНБК с меньшим количеством перерывов. В некоторых примерах уточнённая модель неопределённости положения ствола скважины может снижать затраты и задержки, связанные с проведением высокоточных измерений.
[0051] Технологии, описанные в настоящем документе, могут также использоваться для управления механической скоростью проходки бурением и проведения высокоточных измерений по мере необходимости на основании установленных значений неопределённости траектории ствола скважины. Это может быть выполнено, например, передачей по каналу обратной связи показателя полной неопределённости на контроллер механической скорости проходки бурением, который регулирует скорость бурения для удержания роста неопределённости на низком уровне при одновременном поддержании высокой скорости бурения. Если расчётная неопределённость приближается к максимально допустимому значению, тогда может быть выполнено высокоточное измерение (например, измерение искривления ствола скважины) для отслеживания реальной траектории ствола скважины.
[0052] Мера неопределенности может быть выведена из модели динамики КНБК. Модель динамики КНБК может дать возможность расчёта будущей траектории ствола скважины на основании данных прошлых измерений и расчётных входных управляющих воздействий. В некоторых примерах модель динамики КНБК может динамично уточняться по мере того, как выполняются новые измерения, и по мере того, как поступают новые входные управляющие воздействия для точного отслеживания правильной траектории ствола скважины.
[0053] Подробности одного или более вариантов реализации изобретения изложены в прилагаемых графических материалах и в нижеприведенном описании. Другие признаки, цели и преимущества изобретения станут очевидными из описания и графических материалов, а также из формулы изобретения.
[0054] Фиг. 1 иллюстрирует участок одного из вариантов реализации системы 100 отклоненного ствола скважины в соответствии с настоящим описанием изобретения. Хотя проиллюстрирована система с отклонённым стволом скважины (например, с направленным, горизонтальным или изогнутым по радиусу стволом скважины), система может содержать только относительно вертикальный ствол скважины (например, включая нормальные буровые колебания), а также другие виды стволов скважин (например, боковые стволы, типовые стволы скважин и иные). Кроме того, хотя система 100 проиллюстрирована на поверхности земли, она может быть размещена под водой или в водной природной среде. Как правило, система 100 отклоненного ствола скважины достигает одного или более подземных пластов, и обеспечивает более легкую и более эффективную добычу углеводородов, расположенных в таких подземных пластах. Кроме того, система 100 отклоненного ствола скважины может создавать возможности для более легкого и более эффективного разрыва пласта или работ по интенсификации добычи. Как проиллюстрировано на фиг. 1, система 100 отклоненного ствола скважины содержит буровую компоновку 104, установленную на поверхности земли 102. Буровая компоновка 104 может использоваться для формирования вертикального участка ствола скважины 108, пролегающего от поверхности земли 102 через один или несколько геологических пластов в толще земли. Один или несколько подземных пластов, таких как продуктивный пласт 126, расположены под поверхностью земли 102. Как будет объяснено более подробно ниже, одна или несколько обсадных колонн ствола скважины, таких как кондукторная обсадная колонна 112 и промежуточная обсадная колонна 114, могут быть установлены по меньшей мере в части вертикального участка ствола скважины 108.
[0055] В некоторых вариантах реализации настоящего изобретения буровая компоновка 104 может быть установлена на водной поверхности, а не на поверхности земли 102. Например, в некоторых вариантах реализации настоящего изобретения поверхность земли 102 может быть океаном, заливом, морем или любой другой водной поверхностью, под которой могут быть найдены нефтегазоносные пласты. В краткой форме указание на земную поверхность 102 включает как земную, так и водную поверхности и предусматривает формирование и/или разработку одной или нескольких систем 100 отклоненного ствола скважины из любого из двух или из обоих мест расположения.
[0056] В целом буровая компоновка 104 может быть любой соответствующей буровой компоновкой или буровой установкой, применяемой для формирования стволов скважины или скважин в толще земли. В буровой компоновке 104 могут использоваться традиционные технологии формирования таких стволов скважины, как, например, вертикального участка ствола скважины 108, или могут использоваться нетрадиционные или новые технологии. В некоторых вариантах реализации настоящего изобретения в буровой компоновке 104 может использоваться оборудование для роторного бурения для формирования таких стволов скважины. Оборудование для роторного бурения широко известно и может состоять из колонны бурильных труб 106 и компоновки низа бурильной колонны (КНБК) 118. В некоторых вариантах реализации настоящего изобретения буровая компоновка 104 может состоять из роторной буровой установки. Вращающееся оборудование на такой роторной буровой установке может состоять из компонентов, которые служат для вращения бурового долота, образующего, в свою очередь, ствол скважины, который всё глубже уходит в землю, как, например, вертикальный участок ствола скважины 108. Вращающееся оборудование состоит из множества компонентов (в данном документе проиллюстрированы не все из них), которые сами по себе способствуют передаче мощности от первичного привода к буровому долоту. Первичный привод передаёт мощность роторному столу или системе верхнего прямого привода, которая, в свою очередь, передаёт мощность вращения к колонне бурильных труб 106. Колонна бурильных труб 106, как правило, прикреплена к буровому долоту внутри компоновки низа бурильной колонны 118. Шарнирный анкер, прикрепленный к грузоподъемному оборудованию, несёт значительную, если не всю, массу колонны бурильных труб 106, но может допускать и её свободное вращение.
[0057] Колонна бурильных труб 106, как правило, состоит из секций тяжелой стальной трубы, которые имеют резьбу, так что они могут сцепляться вместе. Ниже буровой трубы находятся одна или несколько утяжеленных бурильных труб, которые тяжелее, толще и крепче, чем буровая труба. Резьбовые утяжеленные буровые трубы помогают добавить нагрузку на колонну бурильных труб 106 выше бурового долота с целью обеспечения достаточного давления сверху вниз на буровое долото, что позволяет долоту проходить бурением один или несколько геологических пластов. Количество и свойства утяжеленных бурильных труб на какой-либо конкретной роторной буровой установке могут меняться в зависимости от условий в скважине, с которыми столкнулись в процессе бурения.
[0058] Буровое долото, как правило, расположено внутри или прикреплено к компоновке низа бурильной колонны 118, которая расположена на скважинном конце колонны бурильных труб 106. Буровое долото в первую очередь отвечает за создание контакта с материалом (например, со скальной породой) внутри одного или более геологических пластов и прохождение бурением такого материала. В соответствии с настоящим описанием изобретения, вид бурового долота может быть выбран в зависимости от типа геологического пласта, встречающегося в процессе бурения. Например, различные геологические пласты, встречающихся в процессе бурения, могут потребовать применения различных буровых долот для достижения максимальной эффективности бурения. Буровые долота могут быть видоизменены из-за таких различий в пластах или из-за воздействия износа на них. Хотя такая деталь не имеет решающего значения для настоящего описания, в целом существует четыре вида буровых долот, каждый из которых подходит для конкретных условий. Указанные четыре наиболее распространенных вида буровых долот включают долота замедленного действия или лопастные долота, калёные буры для шарошечных долот, компактные долота с поликристаллическими алмазами и алмазные долота. Вне зависимости от конкретных выбранных буровых долот для вращательного бурения необходимым условием является непрерывное удаление "бурового шлама".
[0059] Циркуляционная система операции вращательного бурения, как, например, буровая компоновка 104, может быть дополнительным компонентом буровой компоновки 104. В целом, циркуляционная система имеет ряд основных задач, включая охлаждение и смазывание бурового долота, удаление бурового шлама из бурового долота и ствола скважины и нанесение покрытия из глинистой корки на стенки ствола скважины. Циркуляционная система состоит из бурового раствора, который циркулирует вниз через ствол скважины в течение всего процесса бурения. Как правило, компоненты циркуляционной системы содержат насосы бурового раствора, компрессоры, соответствующую водопроводную арматуру и специальные форсунки для добавления присадок к буровому раствору. В некоторых вариантах реализации настоящего изобретения, таких как, например, в процессах горизонтального или наклонно-направленного бурения, забойные двигатели могут использоваться в сочетании с КНБК 118 или в ней. Таким забойным двигателем может быть турбонасосный забойный двигатель или установка электровинтового двигателя, такая как двигатель Муано. Эти двигатели получают буровой флюид через колонну бурильных труб 106 и вращаются для приведения в действие бурового долота или изменения направлений в процессе бурения.
[0060] Во многих операциях вращательного бурения буровой раствор закачивается вниз по колонне бурильных труб 106 и выходит через отверстия или насадки в буровом долоте. Затем раствор течет вверх по направлению к поверхности 102 внутри кольцевого пространства (например, затрубного пространства) между участком ствола скважины 108 и колонной бурильных труб 106, вынося суспензию бурового шлама к поверхности. Буровой раствор, как и буровое долото, может быть выбран в зависимости от типа геологических условий, обнаруженных под земной поверхностью 102. Например, определенные обнаруженные геологические условия и некоторые подземные пласты могут требовать, чтобы в качестве бурового раствора использовалась жидкость, такая как вода. В таких ситуациях для завершения операции бурения может потребоваться свыше 378 500 литров (100 000 галлонов) воды. Если вода сама по себе не пригодна для вынесения бурового шлама из ствола скважины или не обладает достаточной плотностью, чтобы управлять давлением в скважине, для образования бурового раствора (например, бурового глинистого раствора) к воде могут быть добавлены глинистые добавки (бентонит) или добавки на полимерной основании. Как уже отмечалось выше, могут быть вопросы, вызывающие озабоченность в отношении применения таких добавок в подземных пластах, которые могут прилегать к подземным пластам, содержащим питьевую воды, или находиться вблизи них.
[0061] В некоторых вариантах реализации изобретения буровая компоновка 104 и компоновка низа бурильной колонны 118 могут работать с воздухом или пеной в качестве бурового раствора. Например, в процессе пневматического вращательного бурения сжатый воздух поднимает буровой шлам, производимый буровым долотом, вертикально вверх через затрубное пространство к поверхности земли 102. Компрессоры большой производительности могут подводить воздух, который затем нагнетается вниз колонны бурильных труб 106 и в конечном итоге выходит через небольшие отверстия или насадки в буровом долоте. Буровой шлам, удалённый на поверхность земли 102, затем собирается.
[0062] Как было отмечено выше, выбор бурового раствора может зависеть от типа геологических пластов, встречающихся в процессе буровых операций. Кроме того, на это решение может оказывать влияние вид бурения, такой как вертикальное бурение, горизонтальное бурение или наклонно-направленное бурение. Например, в некоторых случаях определенные геологические пласты могут быть более пригодными для пневматического бурения при вертикальном бурении по сравнению с наклонно-направленным или горизонтальным бурением.
[0063] Как проиллюстрировано на фиг. 1, компоновка низа бурильной колонны 118, включая буровое долото, бурит или создает вертикальный участок ствола скважины 108, который пролегает от поверхности земли 102 по направлению к целевому подземному пласту 124 и продуктивному пласту 126. В некоторых вариантах реализации настоящего изобретения целевым подземным пластом 124 может быть геологический пласт, поддающийся пневматическому бурению. К тому же, в некоторых вариантах реализации настоящего изобретения продуктивным пластом 126 может быть геологический пласт, который в меньшей степени поддается процессам пневматического бурения. Как проиллюстрировано на фиг. 1, продуктивный пласт 126 непосредственно примыкает к целевому пласту 124 и расположен под ним. В качестве альтернативы в некоторых вариантах реализации настоящего изобретения может существовать один или более промежуточных подземных пластов (например, различные скальные пласты или минеральные образования) между целевым подземным пластом 124 и продуктивным пластом 126.
[0064] В некоторых вариантах реализации системы 100 отклоненного ствола скважины вертикальный участок ствола скважины 108 может быть обсажен одной или несколькими обсадными трубами. Как проиллюстрировано, вертикальный участок ствола скважины 108 содержит направляющую обсадную колонну 110, которая начинается от поверхности земли 102 и заканчивается на небольшой глубине геологической среды. Часть вертикального участка ствола скважины 108, обсаженная направляющей обсадной колонной 110, может быть стволом скважины, который имеет больший диаметр. Например, эта часть вертикального участка ствола скважины 108 может иметь размер 45 см (17-1/2”) при размере направляющей обсадной колонны 110, равном 34 см (13-3/8”). Кроме того, следует отметить, что в некоторых вариантах реализации настоящего изобретения вертикальный участок ствола скважины 108 может быть смещен от вертикали (например, может быть наклонным стволом скважины). В других некоторых вариантах реализации настоящего изобретения вертикальный участок ствола скважины 108 может быть ступенчатым стволом скважины, таким образом, что участок бурится вертикально вниз, а затем изгибается и переходит в практически горизонтальный участок ствола скважины. По существу, горизонтальный участок ствола скважины затем может быть повернут вниз ко второму практически вертикальному участку, который затем поворачивается ко второму, по существу, горизонтальному участку ствола скважины. Дополнительные практически вертикальный и горизонтальный участки ствола скважины могут быть добавлены в зависимости, например, от типа поверхности земли 102, глубины одного или нескольких целевых подземных пластов, глубины одного или нескольких продуктивных подземных пластов и/или других критериев.
[0065] Вниз по скважине от направляющей обсадной колонны 110 может находиться кондукторная обсадная колонна 112. Кондукторная обсадная колонна 112 может обсаживать немного меньший ствол скважины и защищать вертикальный участок ствола скважины 108 от притока, например, пресной воды из водоносных горизонтов вблизи поверхности земли 102. Затем вертикальный участок ствола скважины 108 может продолжаться вертикально вниз по направлению к точке отклонения скважины от вертикали 120, которая может находиться на 152-305 метров (500-1000 футов) выше целевого подземного пласта 124. Эта часть вертикального участка ствола скважины 108 может быть защищена промежуточной колонной обсадных труб 114. Диаметр вертикального участка ствола скважины 108 в любой точке его длины, а также размер обсадных труб любой из вышеупомянутых колонн обсадных труб могут соответствовать требованиям конкретного процесса бурения.
[0066] При достижении точки отклонения скважины от вертикали 120, буровые инструменты, такие как каротажное и измерительное оборудование, могут быть размещены в участке ствола скважины 108. В этой точке может быть определено точное местоположение компоновки низа бурильной колонны 118 и передано на поверхность земли 102. Кроме того, при достижении точки отклонения скважины от вертикали 120 компоновка низа бурильной колонны 118 может быть изменена или отрегулирована таким образом, что в вертикальный участок ствола скважины 108 могут быть введены надлежащие инструменты наклонно-направленного бурения.
[0067] Как проиллюстрировано на фиг. 1, изогнутый участок ствола скважины 128 и горизонтальный участок ствола скважины 130 были образованы в пределах одного или нескольких геологических пластов. Как правило, изогнутый участок ствола скважины 128 может быть пробурен, начиная от нижнего конца вертикального участка ствола скважины 108, и затем отклонен от вертикального участка ствола скважины 108 в сторону заданного азимута, достигая значения 9-18 градусов на каждые 30 пробуренных метров (100 пробуренных футов). В качестве альтернативы для бурения изогнутого участка ствола скважины 128 могут использоваться различные предварительно заданные значения азимута. При бурении изогнутого участка ствола скважины 128 в компоновке низа бурильной колонны 118 часто применяется оборудование для измерений во время бурения («ИВБ») с целью более точного определения местоположения бурового долота в пределах одного или нескольких геологических пластов, таких как целевой подземный пласт 124. В целом оборудование для измерений во время бурения (ИВБ) может применяться для направленного управления буровым долотом в ходе того, как оно образует изогнутый участок ствола скважины 128, а также горизонтальный участок ствола скважины 130.
[0068] В качестве альтернативы или в дополнение к данным, собранным от оборудования для измерений во время бурения (ИВБ), во время бурения участков ствола скважины, проиллюстрированных на фиг. 1, могут быть получены определенные значения высокоточных измерений (например, измерения искривления ствола скважины). Например, измерения искривления ствола скважины могут проводиться через определённые промежутки времени в ходе бурения через определённые расстояния по длине ствола скважины (например, на различных расстояниях по ходу бурения, таких как каждые 9 метров (30 футов) или иным образом), или по мере необходимости или по желанию (например, когда имеется опасение относительно соблюдения правильности траектории ствола скважины). Как правило, во время измерения искривления ствола скважины полное измерение угла наклона ствола скважины и азимута местоположения в скважине (как правило, в момент измерения на пробуренной глубине) производится для того, чтобы знать с достаточной степенью точности, что соблюдается заданная или особая траектория ствола (например, в соответствии с проектом ствола скважины). Кроме того, может быть полезно знать о местоположении в случае, если должна быть пробурена скважина для глушения фонтана на соседней скважине. Высокоточные измерения могут включать измерение угла наклона ствола скважины по отношению к вертикали и азимута (или направления по компасу) ствола скважины, если направление траектории является критически важным. Эти высокоточные измерения могут быть сделаны в отдельных точках скважины, и в этом случае приблизительная траектория ствола скважины рассчитывается из указанных отдельных точек. Указанные высокоточные измерения могут быть сделаны каким-либо подходящим датчиком высокой точности. Примеры включают, например, простые приборы маятникового типа до сложных электронных акселерометров и гироскопов. Например, при простых измерениях с помощью маятника положение свободно висящего маятника по отношению к сети наблюдений (закрепленной на корпусе измерительного инструмента и выполняющую представление траектории ствола скважины) фиксируется на фотопленку. Пленку проявляют и изучают после извлечения прибора из ствола скважины либо на каротажном кабеле либо при следующем подъёме бурильной колонны из ствола скважины.
[0069] Горизонтальный участок ствола скважины 130 внутри целевого подземного пласта 124 чаще всего может продолжаться на сотни, если не тысячи метров (футов). Несмотря на то, что фиг. 1 иллюстрирует горизонтальный участок ствола скважины 130 как точно перпендикулярный вертикальному участку ствола скважины 108, следует понимать, что направленно пробуренные стволы скважины, такие как горизонтальный участок ствола скважины 130, имеют некоторую вариативность своих траекторий. Таким образом, горизонтальный участок ствола скважины 130 может содержать траекторию в виде “зигзага”, все ещё остающуюся в целевом подземном пласте 124. Как правило, горизонтальный участок ствола скважины 130 бурится к заданной конечной точке 122, которая, как было отмечено выше, может быть удалена от точки отклонения скважины от вертикали 120 на расстояние до многих тысяч метров (футов). Как было отмечено выше, в некоторых вариантах реализации настоящего изобретения изогнутый участок ствола скважины 128 и горизонтальный участок ствола скважины 130 могут быть образованы с использованием процесса пневматического бурения, в котором в качестве бурового раствора используется воздух или пена.
[0070] Система 100 ствола скважины также содержит контроллер 132, который связан с КНБК 118. Контроллер 132 может быть расположен на буровой площадке (например, на буровой компоновке 104 или около неё) или может быть отдалённым по отношению к буровой площадке. Контроллер 132 также может находиться в связи с другими системами, устройствами, базами данных и информационными сетями. Как правило, контроллер 132 может включать компьютер на основании процессора или компьютеры (например, настольный компьютер, ноутбук, сервер, мобильное устройство, мобильный телефон или другие), содержащие запоминающее устройство (например, магнитное, оптическое, ОЗУ/ПЗУ, съемное, дистанционное или локальное), сетевой интерфейс (например, программное обеспечение/интерфейс на основании аппаратных средств), а также одно или несколько периферийных устройств ввода-вывода (например, устройства отображения, клавиатуру, мышь, сенсорный экран и другие).
[0071] Контроллер 132 может по меньшей мере частично контролировать, управлять и выполнять операции, связанные с операцией бурения КНБК и/или высокоточными измерениями датчиков. В некоторых аспектах настоящего изобретения контроллер 132 может управлять и регулировать один или несколько из проиллюстрированных компонентов системы 100 ствола скважины в динамичном режиме, как например, в режиме реального времени в процессе буровых операций в системе 100 ствола скважины. Управление в режиме реального времени может регулироваться на основании данных измерений датчика или на основании изменяющихся расчётов траектории ствола скважины даже без каких-либо измерений датчика.
[0072] Контроллер 132 может выполнять такие операции управления на основании модели динамики КНБК. Модель динамики КНБК может имитировать различные физические явления во время выполнения операции бурения, как например вибрационные помехи и помехи датчика. Контроллер 132 может использовать модель динамики КНБК для определения расчётной траектории ствола скважины и определять меру неопределенности, связанную с расчётной траекторией ствола скважины.
[0073] Простая мера неопределённости исходит из того, что неопределённость положения ствола скважины равна нулю сразу после того, как выполнено измерение, и что она линейно возрастает с увеличением глубины бурения до тех пор, пока не будет выполнено следующее высокоточное измерение (например, измерение искривления ствола скважины). Принимая во внимание, что эта простая мера неопределённости может быть быстро вычислена и без труда реализована на практике, она может быть менее точной, если среда бурения отличается от условий проведения испытаний. Технологии, описанные в настоящем документе, обеспечивают динамичную модель КНБК на основании того, что неопределённость может оцениваться и предсказываться как для настоящего момента, так и для будущего периода времени.
[0074] В целом модель динамики КНБК опирается на лежащую в её основе переменную состояния, которая претерпевает изменения в зависимости от времени, отображая изменяющиеся условия в процессе выполнения операции бурения. Переменная состояния в модели динамики КНБК является оценкой реального состояния КНБК, из которого могут быть получены оценки траектории ствола скважины.
[0075] Например, непрерывная во времени модель в пространстве состояний динамики КНБК может быть сформулирована как:
[0076] 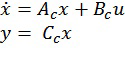 (1)
(1)
[0077] где Ac, Bc и Cc являются системными матрицами в непрерывной временной области. Состояние x представляет собой последовательные состояния системы КНБК. Входной параметр u является управляющим сигналом, который может включать первый и второй углы изгиба КНБК, глубину расположения КНБК, расширение первого и второго пакеров и отделение пакеров. Выходной параметр y является траекторией ствола скважины, выраженной 12 измерениями от ближайшего и от наиболее удалённого блоков измерения угла наклона ствола скважины и магнитометра. Система уравнения 1 может быть дискретизирована с интенсивностью замеров  для получения эквивалентной формы с дискретным временем в пространстве состояний:
для получения эквивалентной формы с дискретным временем в пространстве состояний:
[0078] 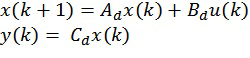 (2)
(2)
[0079] где Ad, Bd и Cd являются дискретными системными матрицами. Кроме того, модель в уравнении 2 может быть модифицирована для включения помех, которые лежат в основании вероятностных стохастических факторов, таких как эффекты взаимодействий скальной породы и бурового долота и вибраций, которые приводят к следующей модели:
[0080]  (3)
(3)
[0081] где w(k) и v(k) представляют собой помехи процесса бурения и помехи измерения соответственно. Переменные помех w(k) и v(k), как правило, моделируются с помощью гауссовых процессов нормального распределения однородных помех, но не гауссовы помехи могут также моделироваться преобразованием матрицы A для включения не только динамики, описываемой матрицей Ad, но и динамики гладких помех, обозначенных As:
[0082] 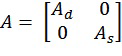
[0083] Системные матрицы A, B и C определяются лежащими в основании модели физическими явлениями и механизмами, используемыми в процессе бурения. На практике эти матрицы оцениваются и моделируются на основании опыта. В дополнение к этому помехи процессов бурения w(k) и v(k) не являются точно известными, хотя для этих процессов могут быть сделаны достаточно разумные предположения и эти предположения могут быть преобразованы на основании опыта.
[0084] Одним из примеров моделирования системных матриц A, B и C является использование системы сосредоточенной массы. На фиг. 2A и 2B проиллюстрированы примеры модели динамики для системы компоновки низа бурильной колонны (КНБК). В этих примерах система КНБК моделируется системой сосредоточенной массы 200, проиллюстрированной на фиг. 2A, которая в дальнейшем абстрактно рассматривается пружинно-массовой системой 202, проиллюстрированной на фиг. 2A. В примере на фиг. 2A КНБК 204 рассматривается как жёстко связанная со стволом скважины через стабилизатор 206. Усилие на контакте рассматривается для каждой из масс (например, масс 208a и 208b на фиг. 2A, представленных массами 210a и 210b на фиг. 2B). Усилие, вызываемое взаимодействиями скальной породы и бурового долота, также рассматривается в массе 212, которая в этом примере представляет буровое долото. Так как эти различные усилия являются неизвестными и случайными по своей природе, то в типовой модели динамики КНБК в уравнении 3 они рассматриваются как процессы случайных помех. Например, модель может быть представлена компонентом As в матрице A, представляющей динамику помех.
[0085] В связи со случайными помехами и потенциальными погрешностями при моделировании матриц системы A, B и C состояние x системы КНБК в целом является не точно известным, а скорее расчётным. При таких вариантах уравнение 3 может быть использовано для определения предположений или оценок состояния x и измерений y, а не их действительных значений. В отношении этих оценок больше будет описано ниже применительно к фиг. 3.
[0086] Модель в уравнении 3 может динамично уточняться по мере того, как контроллер (например, контроллер 132 на фиг. 1) получает новую информацию. Например, на матрицы A и B оказывают воздействия известные входные управляющие воздействия (например, управление КНБК, траектория и другие входные данные) в дополнение к тому, что на них оказывают воздействия любые измерения (например, измерения геофизических исследований в скважине, высокоточные измерения и другие измерения). В связи с этим модель динамики КНБК может уточняться по мере изменения входных управляющих воздействий и/или среды бурения.
[0087] На фиг. 3 проиллюстрирован пример маршрута обработки измерений датчика для уточнения модели динамики КНБК. Несмотря на то, что измерения датчика не всегда могут быть доступны при выполнении измерения датчиком, эта информация способна менять модель (матрицы A, B) непредсказуемыми путями. Контроллер КНБК может использовать такие измерения для обеспечения возможности уточнений в режиме реального времени с целью внесения поправок в модель. Например, если измерения являются высокоточными измерениями (например, измерениями искривления ствола скважины), тогда они могут рассматриваться как прямые наблюдения за траекторией ствола скважины (например, результат работы модели y в уравнении 3). Модель динамики КНБК может затем уточняться с использованием известных технологий (например, уточнённого варианта уравнения Калмана) для включения таких наблюдений в получение оценки следующего состояния системы.
[0088] В блоке 302 в примере на фиг. 3 производится определение того, было ли выполнено высокоточное измерение (например, измерение искривления ствола скважины). Если данные измерения недоступны, тогда обработка переходит к блокам 304 и 306, где получаются “слепые” оценки следующего состояния системы и следующей меры неопределённости. Например, для получения оценки следующего состояния системы КНБК в блоке 304 может использоваться следующее уравнение:
[0089] 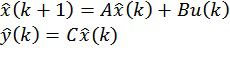 (4)
(4)
[0090] Величина последующих матриц неопределённости может быть определена в блоке 306 с использованием следующих уравнений уточнения неопределённости:
[0091] 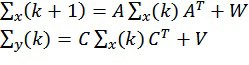 (5)
(5)
[0092] где  является матрицей неопределённости для оценок состояния, а
является матрицей неопределённости для оценок состояния, а  является матрицей неопределённости для выходных данных. Матрицы W и V являются ковариационными матрицами для помех процесса бурения w(k) и помех измерения датчика v(k), соответственно. Эти ковариационные матрицы W и V могут оцениваться с использованием различных технологий, пример которых рассматривается ниже.
является матрицей неопределённости для выходных данных. Матрицы W и V являются ковариационными матрицами для помех процесса бурения w(k) и помех измерения датчика v(k), соответственно. Эти ковариационные матрицы W и V могут оцениваться с использованием различных технологий, пример которых рассматривается ниже.
[0093] Если высокоточные измерения являются доступными в блоке 302, тогда обработка переходит к блокам 308 и 310, где оценки состояния и неопределённости положения ствола скважины уточняются с использованием этих измерений. Например, оценки состояния могут быть уточнены в блоке 308 с использованием уточнённых уравнений фильтрации Калмана:
[0094]  (6)
(6)
[0095] В уравнении 6 y(k) представляет собой результат реального наблюдения, предоставленного измерениями с помощью датчиков высокой точности. Коэффициент K (например, коэффициент, переменный по времени), также известный как приращение наблюдения Калмана, представляет собой поправочный коэффициент для расчёта расхождения между реальной траекторией и расчётной траекторией  . В целом большее значение K подразумевает, что больше веса придано наблюдению, вычисленному по результатам измерений y(k) в определении оценки следующего состояния
. В целом большее значение K подразумевает, что больше веса придано наблюдению, вычисленному по результатам измерений y(k) в определении оценки следующего состояния  . Значение K может быть выбрано в зависимости от любого подходящего логического условия (например, свести к минимуму среднеквадратичную погрешность оценки состояния или любое другое подходящее условие) для достижения желаемой совместимости относительной важности наблюдений по результатам измерений с положенной в основу динамикой модели.
. Значение K может быть выбрано в зависимости от любого подходящего логического условия (например, свести к минимуму среднеквадратичную погрешность оценки состояния или любое другое подходящее условие) для достижения желаемой совместимости относительной важности наблюдений по результатам измерений с положенной в основу динамикой модели.
[0096] Высокоточные измерения также могут быть использованы для уточнения матриц неопределённости в блоке 310 с использованием ковариационных уравнений фильтрации Калмана:
[0097]  (7)
(7)
[0098] Путём сопоставления уравнения 6 с уравнением 4 можно видеть, что оценки состояния могут быть откорректированы с использованием данных высокоточных измерений, если они доступны. По аналогии, сопоставление между уравнением 7 и уравнением 5 показывает, что данные высокоточного измерения могут эффективно снижать значения неопределённости оценок состояния x и отклонений y.
[0099] В некоторых аспектах настоящего изобретения может быть доступна “промежуточная” технология, которая использует измерения от определённых устройств для измерений во время бурения (ИВБ) (например, которые получают низкозатратные результаты измерений низкой точности). В таких случаях оценки также могут быть выполнены с помощью уравнения (6). В таких случаях неопределённость может возрастать быстрее, чем при высокоточных измерениях, но медленнее, чем при “слепых” оценках (например, при оценках без ссылки на такие измерения). В некоторых аспектах настоящего изобретения система может определять тип измерения для получения основанного на анализе совместимости получения низкозатратного измерения с малой точностью в сравнении с высококозатратным высокоточным измерением. В качестве примера уровень точности выполняемого измерения (который может быть дискретизированной или непрерывной переменной) может быть определён путём сведения к минимуму функции затрат, которая включает затраты на проведение измерения (которые, как правило, увеличиваются с увеличением точности) и цены за неопределённость траектории (которые, как правило, уменьшаются с увеличением точности). Члены функции затрат могут быть взвешены, например, для достижения желаемой оптимальной совместимости затрат на измерение и цены за неопределённость траектории ствола скважины. Переключение между уровнями точности измерения может выполняться динамично на основании задач и условий бурения в режиме реального времени или может быть заранее задано в соответствии с твёрдо установленным (или медленно изменяющимся) графиком, или может быть основано на достижении относительной частоты установившегося режима каждого уровня точности.
[00100] Уточнённые оценки состояния (определённые в блоке 304 или 308) могут быть использованы для определения следующего входного управляющего воздействия (например, управляющего воздействия u в уравнении 3) на КНБК в блоке 312. Входное управляющее воздействие также может быть определено на основании ковариации погрешности (например, Σy), определённой в блоке 314, которая может быть определена из уточнений оценок неопределённости траектории ствола скважины (определённой в блоке 306 или 310). Управляющее воздействие может быть определено в соответствии с любым подходящим критерием, таким, как например способ, описанный в настоящем документе, который не ограничен конкретным типом управляющего воздействия. Например, управляющее воздействие может быть спланировано таким образом, что КНБК работает в состояниях, которые уменьшают рост неопределённости траектории ствола скважины, в то время как бурение продолжается без проведения высокоточных измерений.
[00101] На фиг. 4A и 4B проиллюстрированы примеры роста неопределённости для расчётной траектории ствола скважины. На фиг. 4A проиллюстрирован пример роста неопределённости траектории 400 для модели простой линейной неопределённости (где неопределённость возрастает линейно как функция глубины бурения). На фиг. 4B проиллюстрирован пример роста неопределённости 402 для модели динамики КНБК в соответствии с уравнениями 6 и 7. Рост неопределённости положения ствола скважины в уравнении 7 представлен выходной матрицей неопределённости  как функции дискретного времени k. Пренебрегая эффектами отклонения долота от заданного направления (отклонения долота от оси скважины), система КНБК, представленная уравнениями 6 и 7, является стабильной даже без какого-либо управления. Другими словами, все собственные значения системной матрицы A находятся в пределах круга с единичным радиусом, за исключением одного собственного значения, равного 1 (или, эквивалентно, одного полюса, равного 0 в непрерывной временной области), на которое указывает интегрирующее устройство. Таким образом, в сравнении с простой конической моделью роста неопределённости на фиг. 4A уравнение 6 исходит из того, что рост неопределённости является ограниченной динамикой плюс линейным дрейфом, как проиллюстрировано на фиг. 4B. Кроме того, после проведения высокоточного измерения (например, измерения искривления ствола скважины) неопределённость траектории ствола скважины будет уменьшена (но не может быть точно равной нулю в связи с наличием помех измерения).
как функции дискретного времени k. Пренебрегая эффектами отклонения долота от заданного направления (отклонения долота от оси скважины), система КНБК, представленная уравнениями 6 и 7, является стабильной даже без какого-либо управления. Другими словами, все собственные значения системной матрицы A находятся в пределах круга с единичным радиусом, за исключением одного собственного значения, равного 1 (или, эквивалентно, одного полюса, равного 0 в непрерывной временной области), на которое указывает интегрирующее устройство. Таким образом, в сравнении с простой конической моделью роста неопределённости на фиг. 4A уравнение 6 исходит из того, что рост неопределённости является ограниченной динамикой плюс линейным дрейфом, как проиллюстрировано на фиг. 4B. Кроме того, после проведения высокоточного измерения (например, измерения искривления ствола скважины) неопределённость траектории ствола скважины будет уменьшена (но не может быть точно равной нулю в связи с наличием помех измерения).
[00102] В качестве альтернативы линейным моделям в уравнениях 3-7 контроллер КНБК (например, контроллер 132 на фиг. 1) может использовать нелинейную модель динамики КНБК. При использовании таких моделей периодически может выполняться преобразование к линейному виду относительно рабочих точек для получения различных линейных оценок нелинейной модели в различных точках по времени.
[00103] Например, система КНБК может быть представлена в следующей нелинейной форме:
[00104]  (8)
(8)
[00105] С использованием уточнённого способа фильтрации Калмана матрицы неопределённости для оценок состояния и выходные оценки могут быть получены следующим образом:
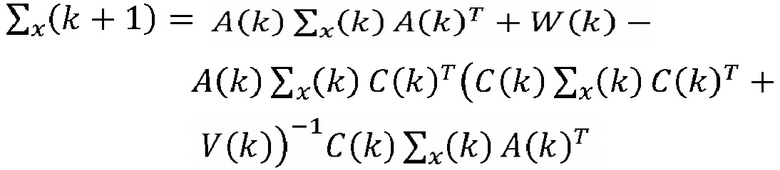 [00106]
[00106]
и
 (9)
(9)
[00107] Следует обратить внимание на то обстоятельство, что уравнение 9 является переменной во времени формой уравнения 7, означая, что матрицы A(k) и C(k) периодически преобразуются в линейную форму из функций f(x, u) и h(x) в различные моменты времени:
[00108] 
[00109] 
[00110] В связи с этим отношение распространения погрешности в уравнении 9 может быть использовано для получения матрицы неопределённости траектории ствола скважины, даже если система КНБК является нелинейной. В целом для моделирования нелинейностей в системе КНБК может быть использован любой подходящий способ, как, например, система способов фильтрации Калмана.
[00111] Меры неопределенности положения ствола скважины в уравнении 9 могут зависеть от оценок дисперсии помех W и V. Такие оценки дисперсии помех могут быть получены с использованием целого ряда способов. Например, автоковариационные наименьшие квадраты (АНК) могут быть использованы для получения оценок ковариационных матриц W и V из данных испытаний в режиме замкнутого контура путём определения вектора  и решения уравнения
и решения уравнения  .
.
[00112] До тех пор, пока доступны данные о входных управляющих воздействиях (углы изгиба КНБК, глубина, расширение и отделение пакеров) и выходные данные (данные измерения датчика), такие способы дают возможность оценки изменчивости бокового усилия, которая основана на этих данных. В добавление или в качестве альтернативы могут быть использованы другие модели, описывающие динамику вероятностных стохастических эффектов путём дополнения таких моделей к уравнениям 3-7 и оценки ковариантности помех W и V.
[00113] Методы, описанные в настоящем документе для моделирования неопределённости положения ствола скважины, могут также применяться к высокоточным измерениям по мере необходимости. На фиг. 5 проиллюстрирована блок-схема типового процесса управления операцией бурения ствола скважины, который использует одну или несколько моделей неопределённости траектории ствола скважины для управления операцией бурения и измерениями датчика. Как правило, высокоточные измерения могут выполняться только периодически в связи с задержками и затратами, связанными с управлением высокоточными датчиками. Например, вращение при бурении, как правило, прекращается на время проведения измерений, и такие приостановки могут вносить вклад в общие непроизводственные затраты времени. Также могут иметь место затраты, связанные с проведением измерений искривления ствола скважины, включающие непроизводственные затраты времени. По этой причине во многих случаях желательно выполнять измерения только тогда, когда это необходимо.
[00114] В некоторых аспектах настоящего изобретения измерения могут выполняться через каждые 9 метров (30 футов) бурения. Однако в некоторых примерах может быть желательным выполнять высокоточные измерения более часто для более точного отслеживания траектории ствола скважины. Например, если поблизости имеются другие стволы скважин, то повышенный риск сближения стволов скважин может оправдывать более частое проведение измерений. В отличие от этого, если другие стволы скважин находятся на большом расстоянии, то может не быть необходимости проведения измерений искривления ствола скважины через каждые 9 метров (30 футов). По этой причине частота проведения высокоточных измерений часто зависит от оптимальной совместимости различных факторов, включая соображения по предотвращению сближения стволов скважин и экономические соображения.
[00115] В типовом процессе на фиг. 5 предельное значение неопределённости определяется в блоке 502 с использованием модуля планируемого поведения наклонно направленной скважины 504 на основании проектной информации о траектории 506 ствола скважины и информации об окружении ствола скважины 508, одновременно со средствами управления механической скоростью проходки бурением 510. Блок оптимизации измерения 512 выполнен с возможностью балансировать экономические затраты (например, информацию о затратах на проведение измерения 514 и о стоимости непроизводственных затратах времени 516), информацию о предельном значении неопределённости 502, средства управления механической скоростью проходки бурением 510, любую информацию об оптимизации механической скорости проходки бурением 518, предоставляемые модулем эффективности бурения 520, и меры неопределённости расчётного положения ствола скважины 522.
[00116] В некоторых примерах выбор решения блоком оптимизации измерения 512 может быть осуществлён получением средней взвешенной величины значений неопределённости ствола скважины в различных географических направлениях, взвешенных по относительной важности осуществления управления стволом скважины в каждом из направлений. Например, блок оптимизации измерения может использовать следующие критерий “общей неопределённости”:
[00117]  (10)
(10)
[00118] 
[00119] Параметр  является предельным значением неопределённости или пределом неопределённости, который определяется оптимальной совместимостью требований к проектированию с затратами, связанными с проведением измерения искривления ствола скважины. В уравнении 10 член
является предельным значением неопределённости или пределом неопределённости, который определяется оптимальной совместимостью требований к проектированию с затратами, связанными с проведением измерения искривления ствола скважины. В уравнении 10 член  является i-м диагональным элементом матрицы ковариационной погрешности
является i-м диагональным элементом матрицы ковариационной погрешности  (например, дисперсия погрешностей i-го измерения). WTi представляет собой весовой коэффициент для неопределённости в конкретном географическом направлении (например, в направлениях x, y или z). Весовой коэффициент зависит от проектных технических условий и требований по предотвращению сближения стволов скважин. Например, при горизонтальном бурении, если имеется другая скважина сразу выше текущего положения, тогда может быть использован большой вес в направлении z для уменьшения риска сближения с соседней скважиной. В некоторых примерах помехи измерения датчиком могут быть вычтены из общей неопределённости в уравнении 10 (так как действительное положение ствола скважины не подвергается помехам датчика):
(например, дисперсия погрешностей i-го измерения). WTi представляет собой весовой коэффициент для неопределённости в конкретном географическом направлении (например, в направлениях x, y или z). Весовой коэффициент зависит от проектных технических условий и требований по предотвращению сближения стволов скважин. Например, при горизонтальном бурении, если имеется другая скважина сразу выше текущего положения, тогда может быть использован большой вес в направлении z для уменьшения риска сближения с соседней скважиной. В некоторых примерах помехи измерения датчиком могут быть вычтены из общей неопределённости в уравнении 10 (так как действительное положение ствола скважины не подвергается помехам датчика):
[00120] 
[00121] где V[i, i] является i-м диагональным элементом матрицы помех измерения V.
[00122] В некоторых примерах контроллер механической скорости проходки бурением (например, контроллер механической скорости проходки 510 на фиг. 5), который находится на поверхности, может регулировать скорость бурения в соответствии с определением, сделанным блоком оптимизации измерения (например, блоком оптимизации измерения 512 на фиг. 5). Например, управление механической скоростью проходки бурением может быть способным осуществлять работу бурового долота в пределах, которые позволяют избежать быстрого роста неопределённости во время максимального увеличения механической скорости проходки. В некоторых примерах управление механической скоростью проходки бурением 510 может подчиняться кривой роста неопределённости, определённой блоком оптимизации измерения 512. При этом модель неопределённости 522 может передавать по каналу обратной связи актуальную матрицу неопределённости на блок оптимизации измерения 512 для оптимизации во время следующего интервала времени управления.
[00123] На фиг. 6 проиллюстрирована блок-схема типового процесса 600 прогностического управления КНБК на основании компьютерной модели с использованием неопределённости расчётной траектории ствола скважины. Один или несколько этапов типового процесса на фиг. 6 могут выполняться контроллером ствола скважины (например, контроллером 132 на фиг. 1). В данном примере контроллер определяет модель динамики КНБК (602). Эта модель может быть, например, моделью в пространстве состояний динамики КНБК. Затем контроллер определяет расчётную траекторию ствола скважины на основании модели динамики КНБК (604). Затем контроллер определяет неопределённость расчётной траектории ствола скважины (606).
[00124] На фиг. 7 проиллюстрирована блок-схема примера дополнительных подробностей определения неопределённости расчётной траектории ствола скважины (например, этап 606 на фиг. 6). В данном примере контроллер определяет расчётную дисперсию помех для модели динамики КНБК (700). Затем контроллер определяет дисперсии расчётных результатов измерений азимута и расчётных результатов измерений угла наклона траектории ствола скважины (702). Затем контроллер определяет взвешенную комбинацию дисперсий расчётных результатов измерений азимута и расчётных результатов измерений угла наклона ствола траектории скважины (704).
[00125] На фиг. 8A проиллюстрирована блок-схема типового процесса управления измерением, выполняемым по мере необходимости, который использует одну или несколько моделей неопределённости траектории ствола скважины для определения того, стоит ли выполнять измерение датчиком (например, высокоточное измерение или измерение датчиком с меньшей точностью). Этапы этого процесса могут быть выполнены, например, после определения неопределённости расчётной траектории ствола скважины (например, 606 на фиг. 6). Один или несколько этапов процесса на фиг. 8A могут быть выполнены, например, контроллером КНБК (например, контроллером 132 на фиг. 1). В данном примере контроллер определяет, что неопределённость расчётной траектории ствола скважины удовлетворяет предельному значению неопределённости (800). Затем контроллер определяет, что измерение датчика (например, высокоточное измерение или измерение датчиком с меньшей точностью) следует принимать, исходя из неопределённости расчётной траектории ствола скважины, удовлетворяющей предельному значению неопределённости (802).
[00126] На фиг. 8B проиллюстрирована блок-схема типового процесса управления КНБК на основании одной или нескольких моделей неопределённости траектории ствола скважины. Этапы этого процесса могут быть выполнены, например, после определения неопределённости расчётной траектории ствола скважины (например, 606 на фиг. 6). Один или несколько этапов процесса на фиг. 8В могут быть выполнены, например, контроллером КНБК (например, контроллером 132 на фиг. 1). В данном примере контроллер определяет входное управляющее воздействие на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины (804). Затем контроллер выполняет управление бурением ствола скважины в соответствии с определённым входным управляющим воздействием на КНБК (806).
[00127] На фиг. 9 проиллюстрирована блок-схема примера дополнительных подробностей определения неопределённости расчётной траектории ствола скважины (например, этап 606 на фиг. 6) и определения входного управляющего воздействия на КНБК, которое уменьшает неопределённость расчётной траектории ствола скважины (например, этап 804 на фиг. 8B). В данном примере контроллер определяет расчётную дисперсию помех для модели динамики КНБК (900). Затем контроллер определяет дисперсии расчётных измерений азимута и расчётных измерений угла наклона ствола скважины для траектории ствола скважины (902). Затем контроллер определяет взвешенную комбинацию дисперсий расчётных измерений азимута и расчётных измерений угла наклона ствола скважины для его траектории (904). Затем контроллер определяет входное управляющее воздействие на КНБК, которое максимально увеличивает скорость проходки при бурении с использованием КНБК с учётом неопределённости расчётной траектории ствола скважины, удовлетворяющей предельному значению неопределённости (906).
[00128] На фиг. 10 проиллюстрирована блок-схема примера компьютерной системы 1000. Например, ссылаясь на фиг. 1, одна или несколько частей контроллера 132 или КНБК 118 могут быть примером системы 1000, описанной в настоящем документе, такой как компьютерная система, используемая любым из пользователей, который получает доступ к ресурсам системы 100 ствола скважины. Система 1000 включает процессор 1010, оперативную память 1020, устройство хранения информации 1030 и устройство ввода/вывода 1040. Каждый из компонентов 1010, 1020, 1030 и 1040 может быть взаимно связан, например, путём использования системной шины 1050. Процессор 1010 способен обрабатывать команды для выполнения в пределах системы 1000. В некоторых вариантах реализации настоящего изобретения, процессор 1010 представляет собой однопотоковый процессор. В некоторых вариантах реализации настоящего изобретения, процессор 1010 представляет собой многопотоковый процессор. В некоторых вариантах реализации настоящего изобретения, процессор 1010 представляет собой квантовый компьютер. Процессор 1010 способен обрабатывать команды, хранящиеся в оперативной памяти 1020 или в устройстве хранения данных 1030. Процессор 1010 может выполнять такие операции, как определение модели динамики КНБК, определение неопределённости траектории ствола скважины, определение расчётов траектории ствола скважины, определение входных управляющих воздействий, которые удовлетворяют целевой функции, и приложение входных управляющих воздействий к КНБК (например, на фиг. 6-9).
[00129] Оперативная память 1020 хранит информацию внутри системы 1000. В некоторых вариантах реализации настоящего изобретения оперативная память 1020 является машиночитаемым носителем. В некоторых вариантах реализации настоящего изобретения, оперативная память 1020 является энергозависимым блоком запоминающего устройства. В некоторых вариантах реализации настоящего изобретения оперативная память 1020 является энергонезависимым запоминающим устройством.
[00130] Устройство хранения данных 1030 способно обеспечивать хранение больших объемов информации для системы 1000. В некоторых вариантах реализации настоящего изобретения устройство хранения данных 1030 является машиночитаемым носителем. В различных отличающихся вариантах реализации изобретения, устройство хранения данных 1030 может включать, например, устройство жесткого диска, накопитель на оптическом диске, жесткий накопитель данных, флэш-накопитель, магнитную ленту или любое другое устройство хранения большой емкости. В некоторых вариантах реализации настоящего изобретения, устройство хранения данных 1030 может быть удалённым облачным хранилищем данных, например, логическим устройство хранения данных, включая множество устройств физического хранения данных, распределенных по информационной сети и доступных с использованием информационной сети. В некоторых примерах устройство хранения данных может хранить долгосрочные данные, такие как данные о горных пластах или характеристики расчёта механической скорости проходки бурением. Устройство ввода/вывода 1040 обеспечивает операции входа/выхода для системы 1000. В некоторых вариантах реализации настоящего изобретения устройство ввода-вывода 1040 может включать одно или более из сетевых интерфейсных устройств, например, коммуникационную плату сети Ethernet, устройство последовательной передачи, к примеру, порт RS-232 и/или устройство беспроводного интерфейса, к примеру, плату беспроводных сетей 802.11, беспроводной модем 3G, беспроводной модем 4G, или почтовый интерфейс. Сетевое интерфейсное устройство позволяет системе 1000 обмениваться данными, например, передавать команды на контроллер 132 или КНБК 118 на фиг. 1 и получать команды от него. В некоторых вариантах реализации изобретения, устройство ввода-вывода может содержать управляющие устройства, выполненные с возможностью получать входные данные и отправлять выходные данные на другие устройства ввода-вывода, например, на клавиатуру, принтер и устройство отображения 1060. В некоторых вариантах реализации настоящего изобретения могут использоваться мобильные компьютерные устройства, мобильные устройства связи и другие устройства.
[00131] Сервер (например, сервер, образующий блок контроллера 132 или систему 100 ствола скважины, проиллюстрированные на фиг. 1) может быть реализован с помощью команд, выполнение которых побуждает одно или более обрабатывающих устройств выполнять процессы и функции, описанные выше, например, такие как вычисление дисперсий шума, определение меры неопределенности, определение входных управляющих воздействий на КНБК, и другие операции и процессы (например, на фиг. 6-9). Такие команды могут содержать, например, интерпретируемые команды, такие как команды сценария, или исполняемый код или другие команды, хранящиеся в машиночитаемом носителе. Различные компоненты системы 100 ствола скважины могут быть реализованы в сети распределённым образом, как например, в виде группы серверов, или набора широко распределенных серверов, или могут быть реализованы в отдельном виртуальном устройстве, включающем множество распределенных устройств, которые работают во взаимодействии друг с другом. Например, одно из устройств может управлять другими устройствами, или устройства могут работать в соответствии с набором согласованных правил или протоколов, или устройства могут координироваться другим способом. Согласованная работа множества распределенных устройств создаёт видимость работы единого устройства.
[00132] Описанные особенности могут быть реализованы в цифровых электронных схемах или в компьютерных аппаратных средствах, встроенных программах, программном обеспечении или в их комбинации. Указанный инструментарий может быть реализован в виде компьютерного программного продукта, реально воплощенного в информационном носителе, например, в машиночитаемом запоминающем устройстве для исполнения программируемым процессором, при этом этапы способа могут быть выполнены с помощью программируемого процессора, исполняющего программу команд для выполнения функций описанных вариантов реализации настоящего изобретения путём выполнения операций на входных данных и генерации выходных данных. Описанные особенности могут быть преимущественно реализованы в одной или нескольких компьютерных программах, выполняемых в программируемой системе, содержащей по меньшей мере один программируемый процессор, соединенный для приема данных и команд от системы для хранения данных и для передачи данных и команд на неё, по меньшей мере с одним устройством ввода и по меньшей мере с одним устройством вывода. Компьютерная программа представляет собой набор команд, которые могут прямо или косвенно использоваться на компьютере для выполнения определенных действий или приводить к определенному результату. Компьютерная программа может быть написана на любом языке программирования, в том числе на компилируемых или интерпретируемых языках программирования, и может быть задействована в любой форме, включая как отдельную программу, так и модуль, компонент, подпрограмму или другой элемент, пригодный для использования в вычислительной среде.
[00133] Подходящие процессоры для выполнения программы команд включают, в качестве примера, микропроцессоры, как общего, так и специального назначения, а также единственный процессор или один из разнообразных процессоров любого вида компьютера. Как правило, процессор будет принимать команды и данные от постоянного запоминающего устройства или оперативного запоминающего устройства, или от обоих. Элементы компьютера могут содержать процессор для выполнения команд и одно или несколько запоминающих устройств хранения команд и данных. Как правило, компьютер может также содержать или быть функционально соединен для связи с одним или более запоминающими устройствами большой ёмкости для хранения файлов с данными; такие устройства содержат магнитные диски, такие как встроенные жесткие диски и съемные диски, магнитооптические диски и оптические диски. Устройства хранения данных, пригодные для реальной реализации команд компьютерных программ и данных, содержат все виды энергонезависимой памяти, включая в качестве примера полупроводниковые запоминающие устройства, такие как стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и устройства флэш-памяти; магнитные диски, такие как встроенные жесткие диски и съемные диски; магнитооптические диски и диски CD-ROM и DVD-ROM. Процессор и оперативная память могут быть дополнены микросхемами ASIC (специализированные заказные интегральные схемы) или встроены в них.
[00134] Для обеспечения взаимодействия с пользователем соответствующие функции могут быть реализованы на компьютере, имеющем устройство отображения, такое как ЭЛТ (электронно-лучевая трубка) или ЖКД (жидкокристаллический дисплей) монитор для отображения информации для пользователя, а также клавиатуру и указательное устройство, такое как мышь или трекбол (шаровой манипулятор), с помощью которого пользователь может обеспечить ввод данных в компьютер.
[00135] Указанные функции могут быть реализованы в компьютерной системе, содержащей внутренний компонент, такой как сервер данных, или содержащей компонент промежуточного программного обеспечения, такой как сервер приложений или Интернет-сервер, или содержащей подсистему первичной обработки данных, такую как клиентский компьютер, имеющий графический пользовательский интерфейс или Интернет-браузер, или любую их комбинацию. Компоненты системы могут быть соединены при помощи любой формы или среды цифровой передачи данных, такой как коммуникационная сеть. Примеры коммуникационных сетей включают, например, локальную вычислительную сеть (ЛВС), глобальную вычислительную сеть (ГВС), а также компьютеры и сети, образующие Интернет.
[00136] Компьютерная система может включать клиентские и серверные части. Клиент и сервер, как правило, удалены друг от друга и обычно взаимодействуют через информационную сеть, такую как описанная выше. Отношение клиент-сервер возникает на основании компьютерных программ, запущенных на соответствующих компьютерах и имеющих отношение друг с другом "клиент-сервер".
[00137] Кроме того, для достижения желаемых результатов, логические потоки, проиллюстрированные на фигурах, не требуют точного следования проиллюстрированному конкретному порядку или последовательности. Кроме того, могут быть предусмотрены другие этапы, или этапы могут быть исключены из описанных потоков, а также другие компоненты могут быть добавлены в описанные системы или удалены из них. Соответственно, другие варианты реализации настоящего изобретения находятся в пределах объема изобретения, определяемого приводимой далее формулой.
[00138] Выше был описан ряд вариантов реализации настоящего изобретения. Тем не менее, следует понимать, что возможно внесение различных изменений. Например, дополнительные аспекты процессов 600 и 800 могут содержать больше этапов или меньше этапов, чем проиллюстрировано на фиг. 6-9. Кроме того, проиллюстрированные на фиг. 6-9 этапы могут быть выполнены в отличных от проиллюстрированных на фигурах последовательностях. Более того, несмотря на то, что эти концепции были описаны в контексте системы бурения ствола скважины, концепции также могут применяться к другим процессам. Например, применительно к медицинскому эндоскопическому исследованию или к другим сферам применения, где инструмент вставляется и управляется внутри неизвестной среды. Соответственно, другие варианты реализации настоящего изобретения находятся в пределах объема изобретения, определяемого приводимой далее формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2641054C2 |
| УПРАВЛЕНИЕ КОМПЛЕКСАМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2640607C1 |
| СИСТЕМА, СПОСОБ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ С КОМПЬЮТЕРНОЙ ПРОГРАММОЙ ДЛЯ ПРОГНОЗИРОВАНИЯ ГЕОМЕТРИИ СКВАЖИНЫ | 2011 |
|
RU2560462C2 |
| СПОСОБ И СИСТЕМА НАПРАВЛЕННОГО БУРЕНИЯ, ИСПОЛЬЗУЮЩИЕ КОНТУРЫ МНОГОКРАТНОЙ ОБРАТНОЙ СВЯЗИ | 2014 |
|
RU2669414C1 |
| УСТРАНЕНИЕ СКАЧКООБРАЗНЫХ КОЛЕБАНИЙ БУРОВОГО СНАРЯДА | 2013 |
|
RU2638072C2 |
| УЛУЧШЕННАЯ ОЦЕНКА ИСКРИВЛЕНИЯ СТВОЛА СКВАЖИНЫ, ОСНОВАННАЯ НА РЕЗУЛЬТАТАХ ИЗМЕРЕНИЙ ИЗГИБАЮЩЕГО МОМЕНТА ИНСТРУМЕНТА | 2016 |
|
RU2663653C1 |
| ОЦЕНКА ПАРАМЕТРОВ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ НА ОСНОВЕ МОДЕЛИ ПРИ ПРОВЕДЕНИИ СКВАЖИННЫХ ОПЕРАЦИЙ | 2019 |
|
RU2754892C1 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ НАКЛОННО-НАПРАВЛЕННЫМ БУРЕНИЕМ | 2017 |
|
RU2728026C2 |
| ЗАМКНУТЫЙ ЦИКЛ УПРАВЛЕНИЯ ПАРАМЕТРАМИ БУРЕНИЯ | 2013 |
|
RU2639219C2 |
| БУРОВОЕ ДОЛОТО С САМОРЕГУЛИРУЮЩИМИСЯ ПЛОЩАДКАМИ | 2015 |
|
RU2708444C2 |
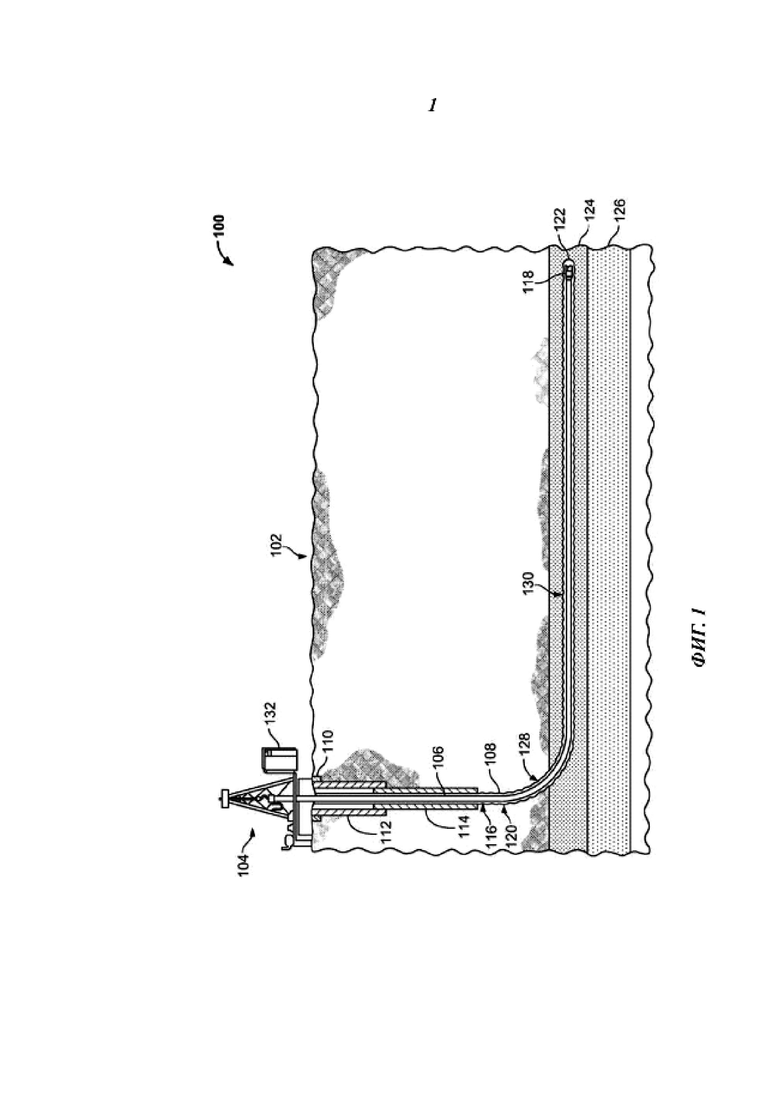
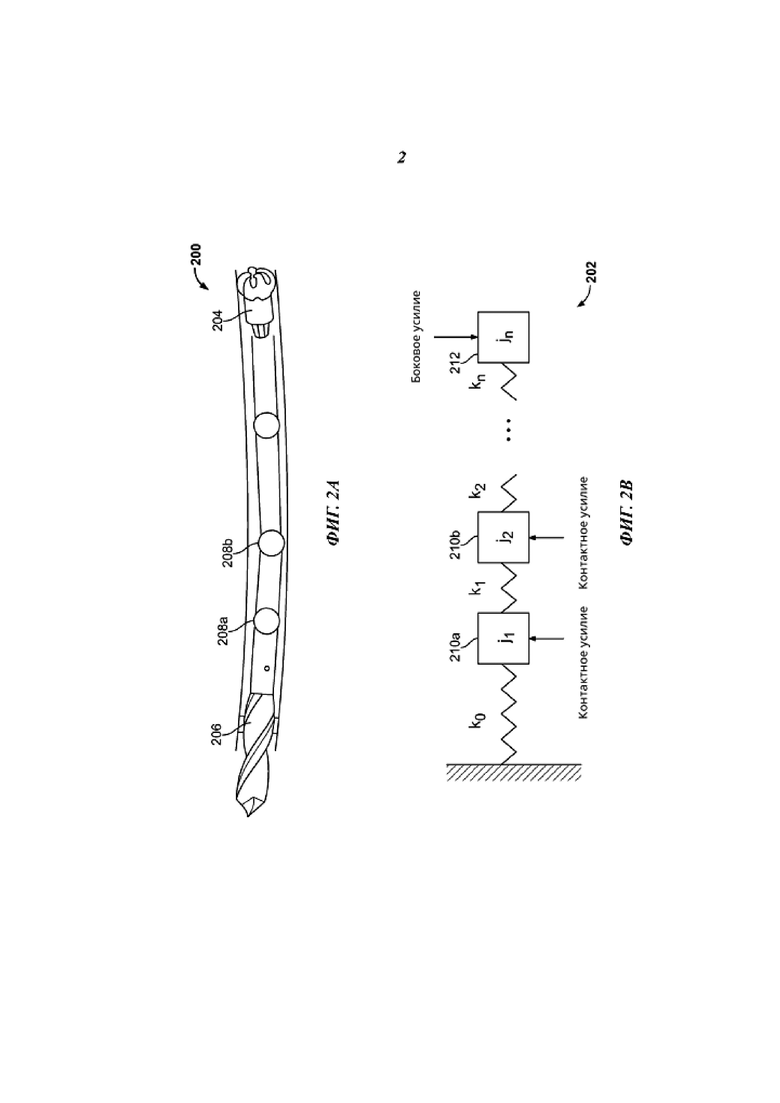
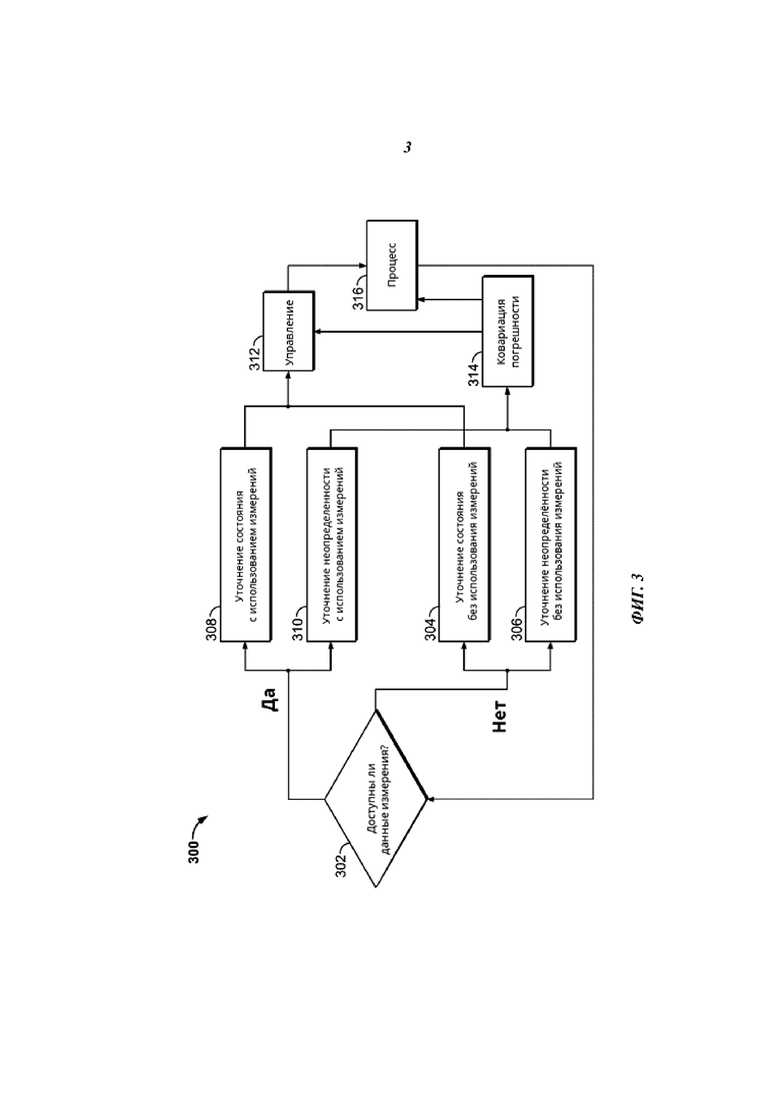
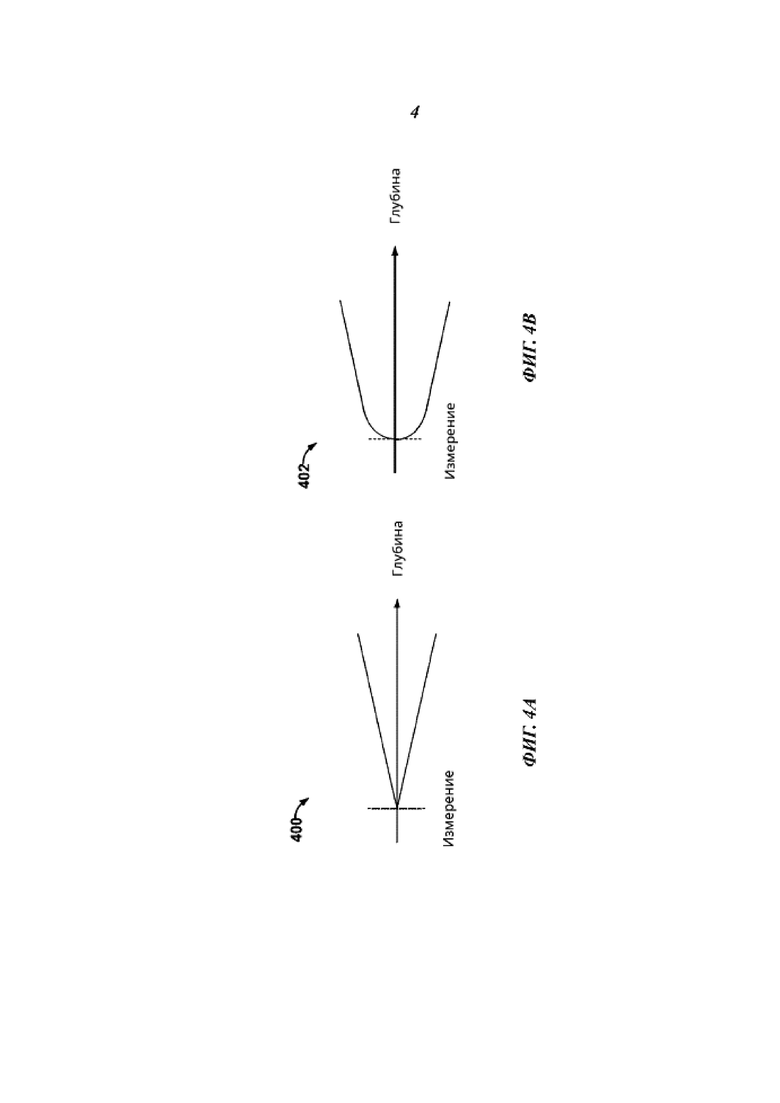
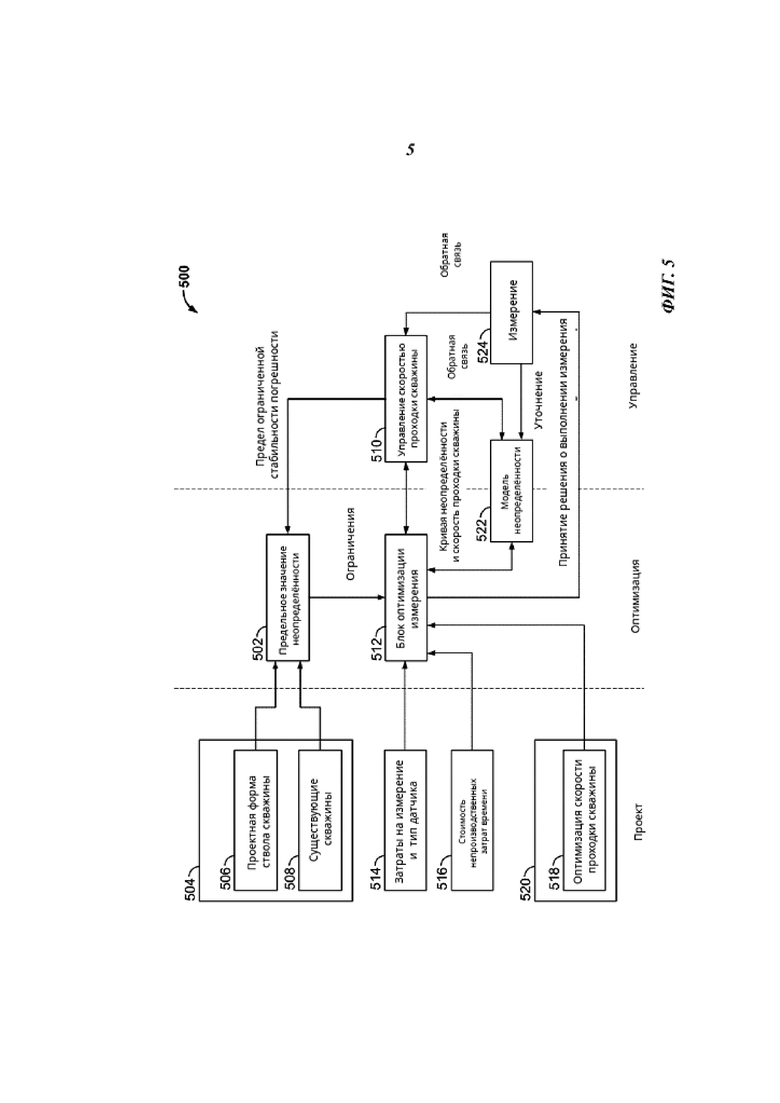
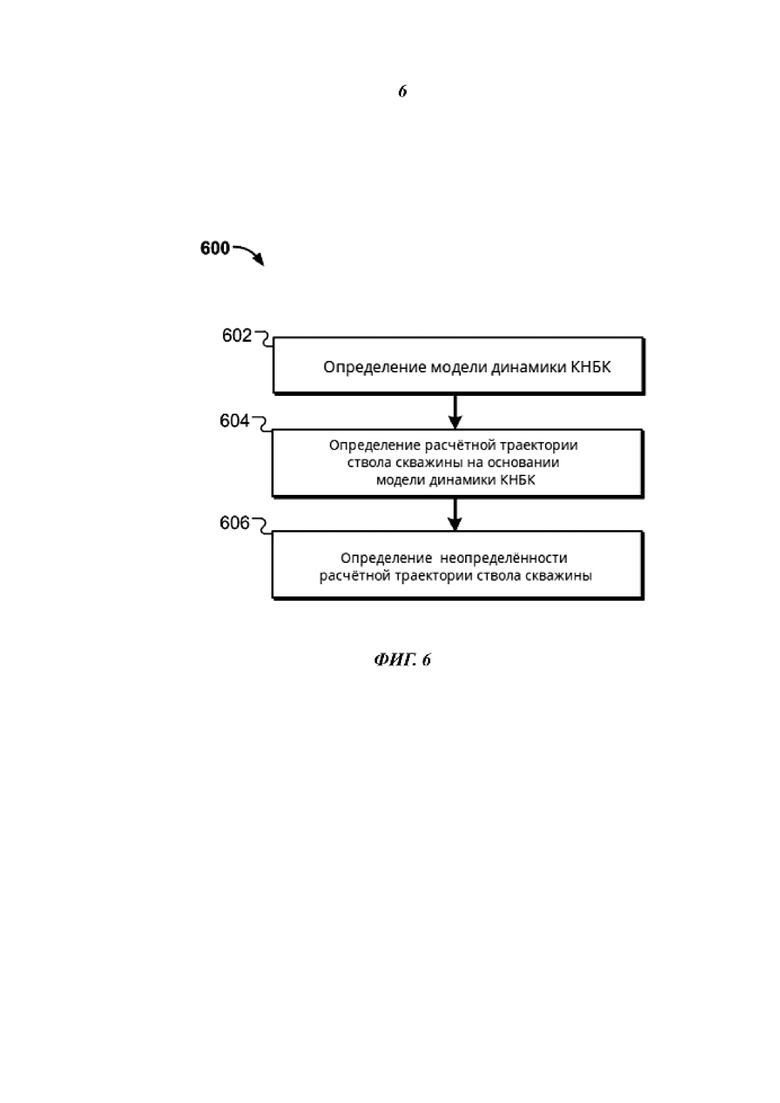
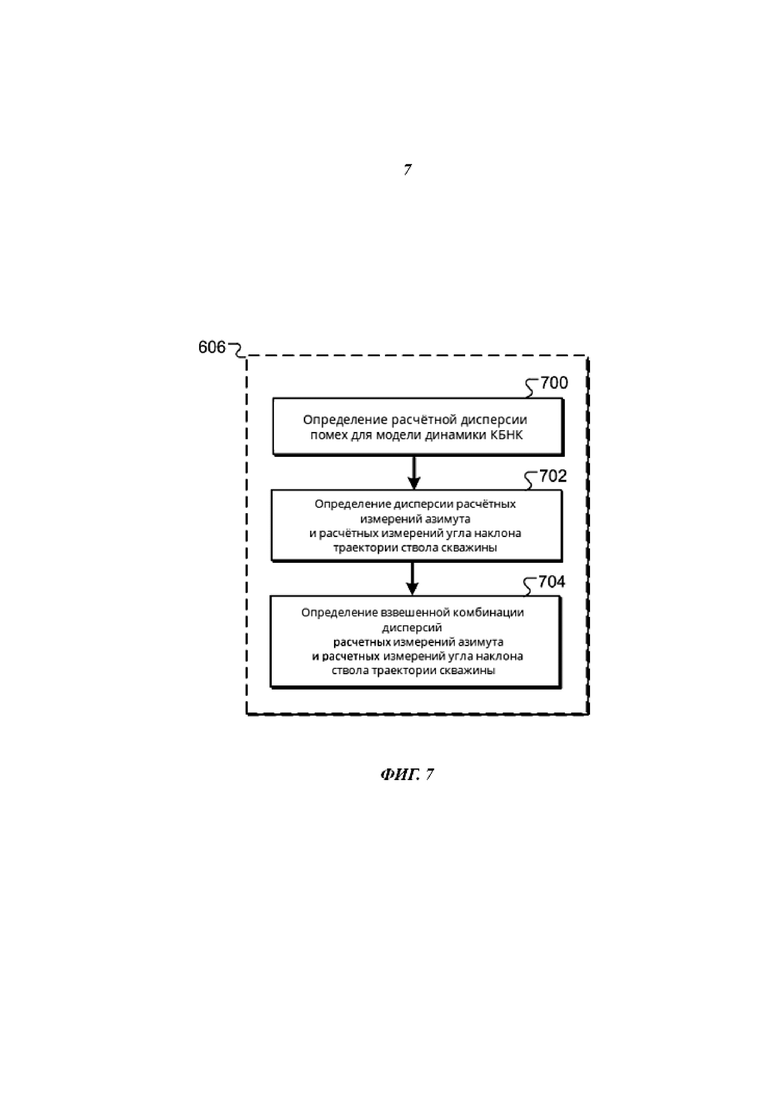

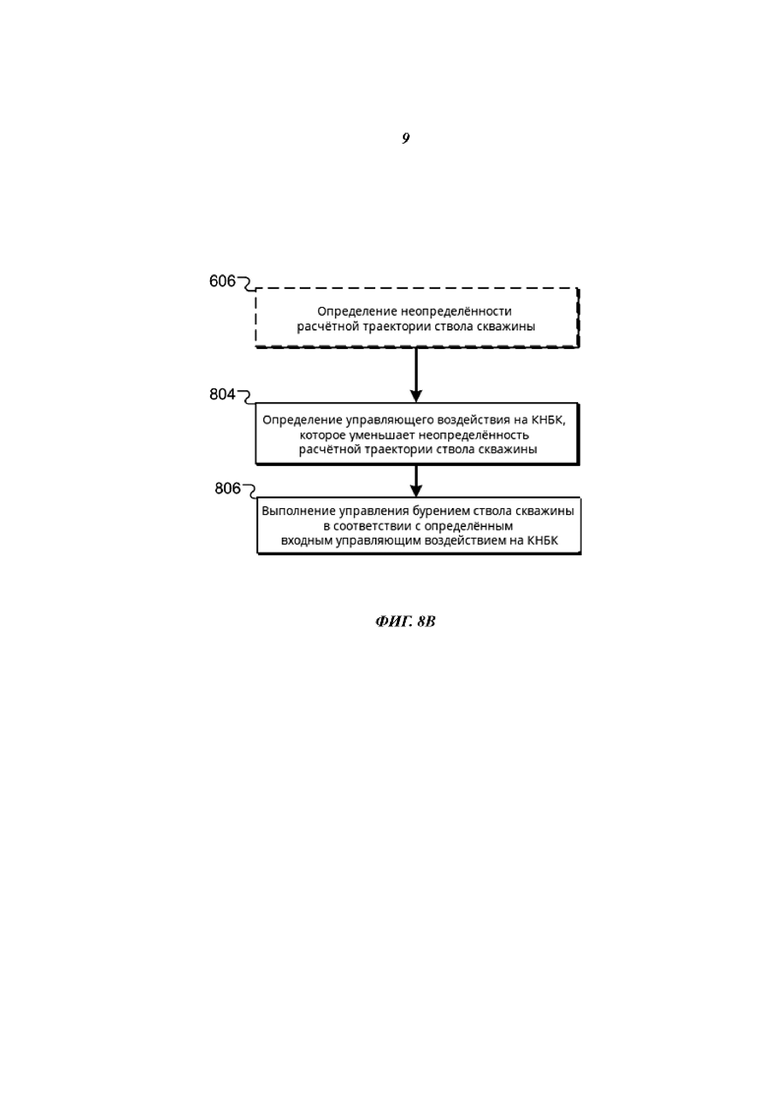
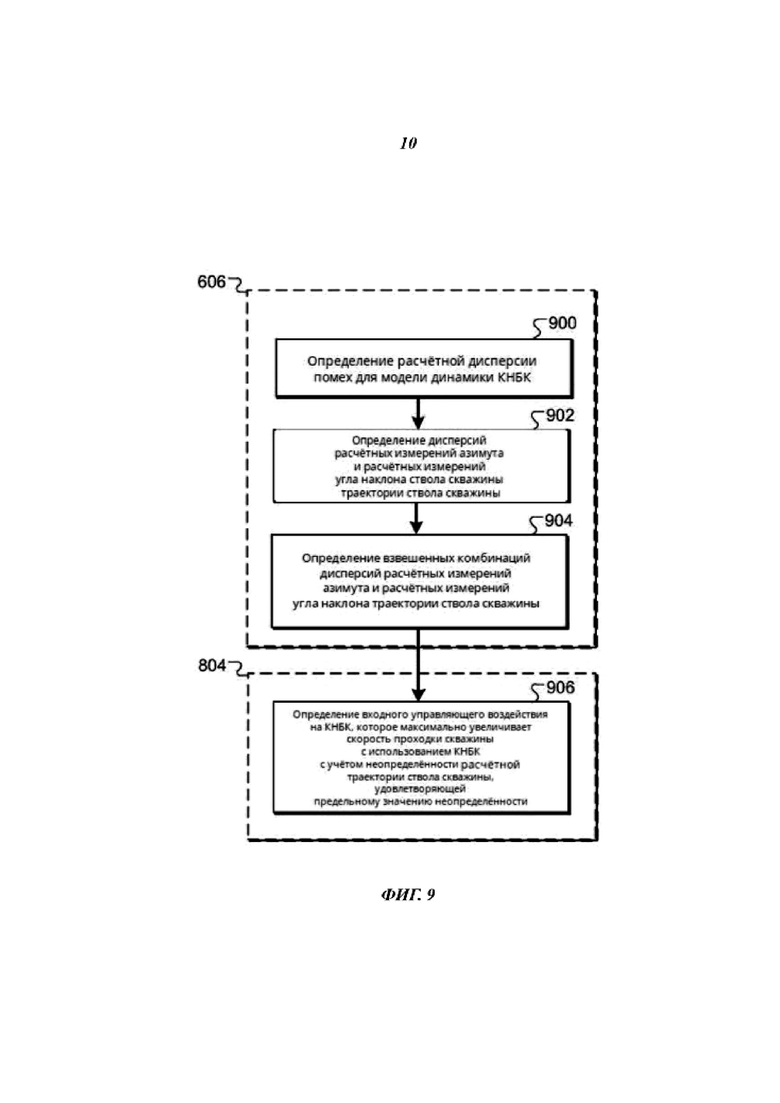
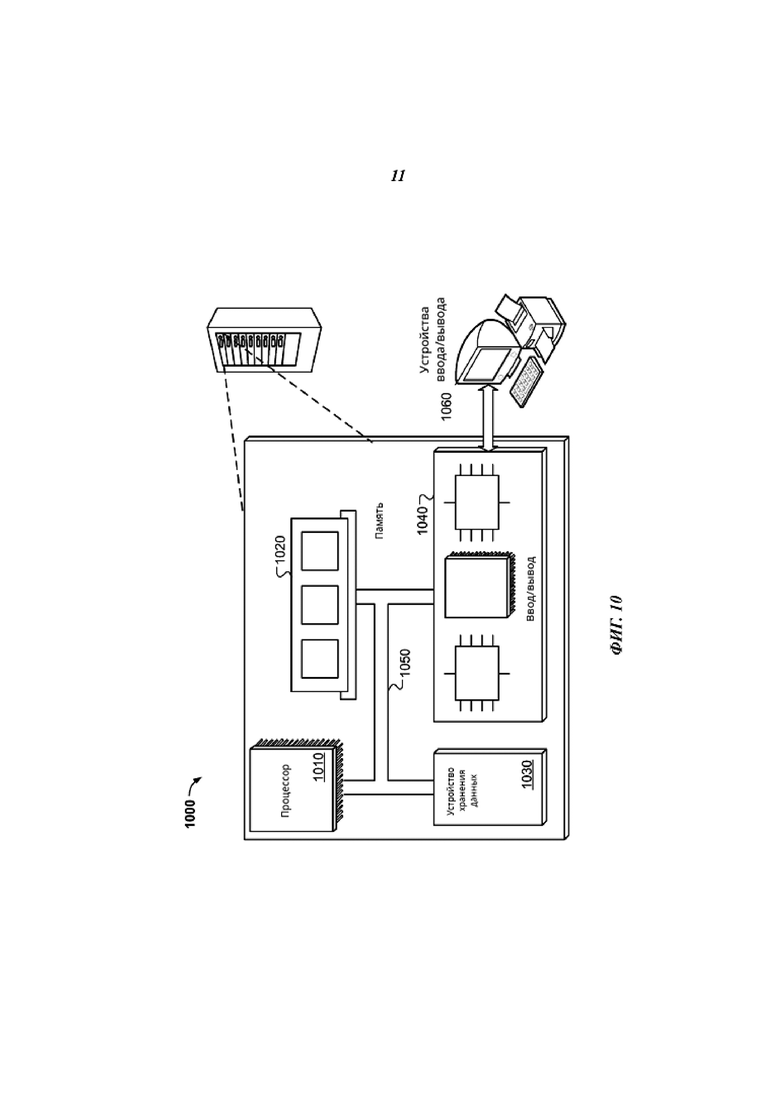
Изобретение относится к автоматизированному управлению операцией в стволе скважины для добычи углеводородов из подземных пластов. Техническим результатом является повышение точности определения неопределенности расчетной траектории ствола скважины и, как следствие, повышение точности определения расчетной траектории ствола скважины. Способ включает определение модели динамики КНБК, определение на основании модели динамики КНБК расчетной траектории ствола скважины и определение неопределенности расчетной траектории ствола скважины. Причем определение неопределенности расчетной траектории ствола скважины включает определение расчетной дисперсии помех для модели динамики КНБК, определение дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины на основании расчетной дисперсии помех и определение взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины. 3 н. и 20 з.п. ф-лы, 10 ил.
1. Реализованный компьютером способ управления компоновкой низа бурильной колонны (КНБК) в стволе скважины, при этом способ включает:
определение модели динамики КНБК;
определение на основании модели динамики КНБК расчетной траектории ствола скважины и
определение неопределенности расчетной траектории ствола скважины, отличающийся тем, что определение неопределенности расчетной траектории ствола скважины включает:
определение расчетной дисперсии помех для модели динамики КНБК;
определение дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины на основании расчетной дисперсии помех; и
определение взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины.
2. Реализованный компьютером способ по п. 1, отличающийся тем, что определение неопределенности расчетной траектории ствола скважины дополнительно включает:
вычитание дисперсии расчетных помех датчика из взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины.
3. Реализованный компьютером способ по п. 1, отличающийся тем, что определение расчетной дисперсии помех для модели динамики КНБК включает определение расчетной дисперсии по меньшей мере одного из вибрационных помех или помех датчика.
4. Реализованный компьютером способ по п. 1, отличающийся тем, что определение расчетной дисперсии помех для модели динамики КНБК включает использование автоковариационного алгоритма метода наименьших квадратов.
5. Реализованный компьютером способ по п. 1, дополнительно включающий:
определение того, что неопределенность расчетной траектории ствола скважины удовлетворяет предельному значению неопределенности;
определение того, что измерение датчиком следует принимать исходя из неопределенности расчетной траектории ствола скважины, удовлетворяющей предельному значению неопределенности.
6. Реализованный компьютером способ по п. 5, дополнительно включающий определение предельного значения неопределенности на основании по меньшей мере одного из: проектной траектории ствола скважины, плана окружающих стволов скважин или проектирования возможностей управления скоростью проходки скважины с использованием КНБК.
7. Реализованный компьютером способ по п. 5, отличающийся тем, что определение того, что измерение датчика следует принимать дополнительно исходя из оптимальных затрат на проведение измерения датчика и на скорость проходки скважины с использованием КНБК.
8. Реализованный компьютером способ по п. 5, дополнительно включающий осуществление управления приемом измерения датчика в стволе скважины.
9. Реализованный компьютером способ по п. 8, отличающийся тем, что осуществление управления приемом измерения датчика включает прием высокоточного измерения по меньшей мере от одного из: инклинометра или магнитометра.
10. Реализованный компьютером способ по п. 5, дополнительно включающий определение того, что измерение датчика является доступным, а снижение неопределенности расчетной траектории ствола скважины основано на измерении датчика.
11. Реализованный компьютером способ по п. 10, дополнительно включающий обновление модели динамики КНБК на основании измерения датчика.
12. Реализованный компьютером способ по п. 5, дополнительно включающий определение уровня точности для измерения датчика, которое следует принимать исходя из анализа совместимости затрат, связанных с различными уровнями точности измерения, и значений неопределенности расчетной траектории ствола скважины, связанных с различными уровнями точности измерения.
13. Реализованный компьютером способ по п. 5, дополнительно включающий определение частоты проведения измерений датчика на основании по меньшей мере одного из: проектной информации о стволе скважины, информации о затратах, неопределенности траектории ствола скважины или измерений датчика.
14. Реализованный компьютером способ по п. 5, дополнительно включающий определение неопределенности расчетной траектории ствола скважины посредством получения средневзвешенной величины значений неопределенности положения скважины в различных географических направлениях.
15. Реализованный компьютером способ по п. 1, дополнительно включающий:
определение входного управляющего воздействия на КНБК, которое уменьшает неопределенность расчетной траектории ствола скважины; и
бурение ствола скважины в соответствии с определенным входным управляющим воздействием на КНБК.
16. Реализованный компьютером способ по п. 15, отличающийся тем, что определение входного управляющего воздействия на КНБК включает определение по меньшей мере одного из: управления первым углом изгиба, управления вторым углом изгиба, управления первым пакером или управления вторым пакером.
17. Реализованный компьютером способ по п. 15, отличающийся тем, что определение входного управляющего воздействия на КНБК, которое уменьшает неопределенность расчетной траектории ствола скважины, включает определение входного управляющего воздействия на КНБК, которое максимизирует скорость проходки скважины посредством КНБК с учетом неопределенности расчетной траектории ствола скважины, удовлетворяющей предельному значению неопределенности.
18. Реализованный компьютером способ по п. 15, отличающийся тем, что определение неопределенности расчетной траектории ствола скважины дополнительно включает вычитание дисперсии расчетных помех датчика из взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины.
19. Реализованный компьютером способ по п. 15, отличающийся тем, что определение расчетной дисперсии помех для модели динамики КНБК включает определение расчетной дисперсии по меньшей мере одного из: вибрационных помех или помех датчика.
20. Реализованный компьютером способ по п. 15, отличающийся тем, что определение расчетной дисперсии помех для модели динамики КНБК включает использование автоковариационного алгоритма метода наименьших квадратов.
21. Реализованный компьютером способ по п. 1, отличающийся тем, что определение модели динамики КНБК включает приведение к линейному виду нелинейной модели динамики КНБК для эксплуатационного режима работы КНБК.
22. Система управления компоновкой низа бурильной колонны (КНБК) в стволе скважины, содержащая:
компоновку низа бурильной колонны (КНБК), по меньшей мере частично расположенную внутри ствола скважины в подземной зоне или вблизи нее, при этом КНБК соединена по меньшей мере с одним датчиком; и
контроллер, коммуникативно соединенный с КНБК, при этом контроллер выполнен для осуществления операций по:
определению модели динамики КНБК;
определению расчетной траектории ствола скважины на основании модели динамики КНБК и
определению неопределенности расчетной траектории ствола скважины, отличающаяся тем, что определение неопределенности расчетной траектории ствола скважины включает:
определение расчетной дисперсии помех для модели динамики КНБК;
определение дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины на основании расчетной дисперсии помех; и
определение взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины.
23. Энергонезависимое машиночитаемое средство хранения информации, программируемое по меньшей мере одной компьютерной программой, содержащей команды, чтобы при выполнении привести в действие по меньшей мере один процессор для выполнения операций по управлению компоновкой низа бурильной колонны (КНБК) в стволе скважины, при этом операции включают:
определение модели динамики КНБК;
определение расчетной траектории ствола скважины на основании модели динамики КНБК и
определение неопределенности расчетной траектории ствола скважины, отличающееся тем, что определение неопределенности расчетной траектории ствола скважины включает:
определение расчетной дисперсии помех для модели динамики КНБК;
определение дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины на основании расчетной дисперсии помех; и
определение взвешенной комбинации дисперсий расчетных результатов измерений азимута и расчетных результатов измерений угла наклона траектории ствола скважины.
| ЕА 200200107 А1, 29.08.2002 | |||
| US 20080314641 A1, 25.12.2008 | |||
| US 20100191516 A1, 29.07.2010 | |||
| US 20120024606 A1, 02.02.2012. |

