Предпосылки создания изобретения
Скважинные каротажные измерительные приборы (или приборы) используют в буровых скважинах (стволах скважин) для выполнения, например, измерений качественных показателей пластов, чтобы получать петрофизические свойства пластов, окружающих ствол скважины, и флюидов и минералов, содержащихся в них. Такие скважинные каротажные приборы могут включать в себя, например, электромагнитные приборы, ядерные приборы, акустические приборы и приборы ядерного магнитного резонанса (ЯМР).
Скважинные каротажные приборы можно перемещать на протяжении буровой скважины подвешенными на бронированном электрическом кабеле (каротажном кабеле), после того как буровая скважина пробурена. Такие приборы на каротажном кабеле широко используют. Однако желательно, чтобы информация при бурении буровой скважины исходила от приборов для измерений в процессе бурения (ИПБ) и каротажа во время бурения (КВБ), которые обычно размещают в особых специализированных утяжеленных бурильных трубах, образующих часть инструментальной колонны, называемой компоновкой низа бурильной колонны (КНБК), используемой для бурения, направления и каротажа буровой скважины. В зависимости от обстоятельств по результатам сбора и обработки такой информации во время процесса бурения оператор буровой скважины может принимать в реальном времени обоснованные решения, касающиеся операции бурения, для оптимизации траектории или размещения буровой скважины и оптимизации характеристик бурения, и/или касающиеся выполнения каротажных измерений перед стволом скважины, регистрируемых сразу же позади бурового долота в только что пробуренном пласте, и/или деформации пласта в результате процесса бурения, и/или касающиеся обеспечения или гарантии каротажа в стволах скважин, трудных для каротажа с использованием способов каротажа с зондом на кабеле.
Измерения в процессе бурения могут давать информацию о параметрах бурения, таких как механика бурения (например, осевая сила, прилагаемая к буровому долоту, прикрепленному к нижней части бурильной колонны, также называемая нагрузкой на долото, вращающий момент, прилагаемый к бурильной колонне, также называемый вращающим моментом на забое скважины, и давление скважинного флюида внутри или вне бурильной колонны, иногда преобразуемое в эквивалентную плотность флюида, такую как эквивалентная плотность циркуляции и эквивалентная статическая плотность), механика бурения (например, частота вращения компоновки низа бурильной колонны, также называемая частотой вращения утяжеленной бурильной трубы, удары и вибрации бурильной колонны и скважинные расходы флюида при использовании частоты вращения турбины), направление буровой скважины (например, геодезическое или геомагнитное направление буровой скважины и отклонение буровой скважины от вертикали), и другую информацию, подобную температуре в буровой скважине. Приборы для каротажа во время бурения могут обеспечивать измерения качественных показателей пласта, таких как электрическое удельное сопротивление или удельная проводимость пласта, комплексная диэлектрическая проницаемость, естественное гамма-излучение, объемная плотность и фотоэлектрический фактор, пористость по данным каротажа с использованием тепловых или надтепловых нейтронов, поперечное сечение захвата тепловых нейтронов (называемое СИГМА), различные, наведенные нейтронами спектры гамма-излучения (неупругие спектры или спектры захвата или активации гамма-излучения), акустические времена пробега или скорости акустических волн и время релаксации или распределения постоянной диффузии при ядерном магнитном резонансе. Приборы для измерений в процессе бурения и каротажа во время бурения часто имеют компоненты, функции которых аналогичны функциям компонентов, расположенных в спускаемых на кабеле приборах (например, излучающие и приемные антенны), но приборы для измерений в процессе бурения и каротажа во время бурения обычно создают для работы в суровых и агрессивных скважинных условиях бурения. Термины «измерения в процессе бурения» и «каротаж во время бурения» часто используют на равных основаниях, и должно быть понятно, что использование любого термина в этом раскрытии включает в себя сбор информации о пласте и буровой скважине, а также данных о перемещении, положении и геометрии буровой компоновки.
Скважинные каротажные приборы можно использовать для определения объемных параметров пласта, то есть, количества объемной доли, которое можно выражать в процентах, каждой составляющей, присутствующей в данной пробе оцениваемого пласта (эти составляющие, которые можно считать элементарными структурными блоками пласта, также называют конечными элементами). Измерение объемных параметров пласта может включать в себя идентификацию присутствующих составляющих и назначение однозначных характеристик или сигнатур каждой или любой составляющей с учетом различных рассматриваемых каротажных измерений (сигнатуры этих конечных элементов также называют конечными точками). В таком случае совместно с соответствующей моделью геологической среды и правилами смешивания рассматриваемых измерений можно преобразовывать измерения каротажных приборов в элементные объемные доли одной или нескольких составляющих. Термин «модель геологической среды» распространяется на геометрическое или пространственное расположение различных составляющих относительно друг друга, а термин «правила смешивания» отражает, как конкретные отсчеты каротажных измерений ведут себя или изменяются при изменениях в процентах присутствующих составляющих (когда изменение подчиняется линейной зависимости, правила смешивания считаются линейными).
Краткое изложение
Это краткое изложение предназначено для ознакомления с выбором концепций, которые дополнительно рассматриваются ниже при подробном описании. Это краткое изложение не предназначено для идентификации ключевых или существенных признаков заявленного объекта изобретения и не предназначено для использования в качестве средства для ограничения объема заявленного объекта изобретения.
Способ скважинного каротажа геологического пласта, имеющего ствол скважины, может включать в себя сбор множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса. Способ может также включать в себя идентификацию множества флюидов в геологическом пласте на основании данных ядерного магнитного резонанса, определение соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, определение кажущихся объемов для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и определение скорректированных объемов для идентифицированных флюидов на основании кажущихся объемов.
Родственная скважинная каротажная система может включать в себя скважинный каротажный прибор для сбора множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины в геологическом пласте, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса. Кроме того, процессор может быть включен для идентификации множества флюидов в геологическом пласте на основании данных ядерного магнитного резонанса, определения соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, определения кажущихся объемов для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и определения скорректированных объемов для идентифицированных флюидов на основании кажущихся объемов.
Кроме того, предложен нетранзиторный считываемый компьютером носитель. Считаемый компьютером носитель может иметь исполняемые компьютером инструкции для побуждения компьютера к идентификации множества флюидов в геологическом пласте на основании множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины в геологическом пласте, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса, определению соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, определению кажущихся объемов для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и определению скорректированных объемов для идентифицированных флюидов на основании кажущихся объемов.
Краткое описание чертежей
На чертежах:
фиг. 1 - вид скважинной каротажной системы согласно примеру варианта осуществления;
фиг. 1А - схематическое изображение, иллюстрирующее возможные источники и причины изменений между различными моментальными снимками (например, в различные моменты времени, или с различных глубин исследования, или на различных глубинах скважины), согласно этому раскрытию;
фиг. 2 - вид показанного для примера электромагнитного скважинного каротажного инструмента или прибора, который можно использовать вместе с системой из фиг. 1;
фиг. 2А - график показанных для примера обычных наложений, отображающих индивидуальные отклики (векторы) скважинного каротажного прибора на каждую составляющую в пласте, согласно этому раскрытию;
фиг. 2В - график модифицированного наложения, включающего в себя векторы (или прямолинейные сегменты), проходящие через начало О, образованные репликацией (или протаскиванием) различных векторов  из фиг. 2А;
из фиг. 2А;
фиг. 2C-2F - графики, иллюстрирующие применение наложений, при этом картины и кластеры точек данных приближенно выровнены вдоль различных линейных сегментов, показывающих перестановки пар различных x-составляющих;
фиг. 2G-2I - графики, которые следуют из фиг. 2C-2F и иллюстрируют применение наложений, при этом картины и кластеры точек данных приближенно выровнены вдоль различных линейных сегментов, проходящих через начало О, при этом показаны перестановки пар различных x-составляющих;
фиг. 2J-2M - графики, на которых представлена объединенная информация из фиг. 2C-2F и фиг. 2G-2I, показывающая картины перестановки пар x-составляющих на исходных обычных наложениях;
фиг. 2N-2P - графики с использованием тех же примеров, как фиг. 2С-2М, которые иллюстрируют использование наблюдаемой вариации пористости для назначения однозначного отклика в каротажных измерениях или сигнатуры для точно таких же составляющих, одновременно участвующих в перестановках пар различных x-составляющих;
фиг. 2Q - график, иллюстрирующий псевдонормирование, при котором норму принимают равной  и когда эти точки данных отображают при норме выше заданного порога
и когда эти точки данных отображают при норме выше заданного порога  шума;
шума;
фиг. 2R - график, иллюстрирующий псевдонормирование, при котором норму принимают равной  и когда эти точки данных отображают при норме выше заданного порога
и когда эти точки данных отображают при норме выше заданного порога  шума;
шума;
фиг. 3А-3D - графики, иллюстрирующие моделированные эффективные сигнатуры воды в сравнении с полученными (в предположении, что вода является смачивающей жидкостью);
фиг. 4 - график набора данных ядерного магнитного резонанса (ЯМР), используемого в этой заявке в качестве примера;
фиг. 5-13 - графики, иллюстрирующие применение способов псевдонормирования, описанных выше относительно набора данных ядерного магнитного резонанса, показанного на фиг.4, включающие в себя кластеры псевдонормированных картин, соответствующих перестановкам пар различных x-составляющих, согласно этому раскрытию;
фиг. 14A-14G - графики, иллюстрирующие концепцию гиперпространства пористости, определяемого как многомерное пространство, содержащее в каротажных измерениях конечные точки этих составляющих, присутствующих внутри порового пространства пласта, и применение такой концепции для определения пористости согласно примеру варианта осуществления;
фиг. 15 - график, иллюстрирующий пример минимизации согласно примеру варианта осуществления для случая, когда присутствующими флюидами были вода, нефть и газ, а рассматриваемыми измерениями были объемная плотность, пористость по данным нейтронного каротажа и поперечное сечение захвата тепловых нейтронов (СИГМА);
фиг. 16А - диаграмма, на которой отображены векторы  , используемые в случае истинного нормирования, согласно примеру варианта осуществления;
, используемые в случае истинного нормирования, согласно примеру варианта осуществления;
фиг. 16В - диаграмма, на которой отображено соотношение (соотношения)  для сопоставления с фиг. 2, используемое в случае истинного нормирования;
для сопоставления с фиг. 2, используемое в случае истинного нормирования;
фиг. 16С - диаграмма, на которой отображены векторы  , используемые в случае кажущегося нормирования;
, используемые в случае кажущегося нормирования;
фиг. 16D - диаграмма, на которой отображено соотношение (соотношения) для сопоставления с фиг. 2А, используемое в случае кажущегося нормирования;
фиг. 17А - диаграмма, которой иллюстрируется новое семейство кроссплотов с  в качестве оси X и
в качестве оси X и  в качестве оси Y;
в качестве оси Y;
фиг. 17В - диаграмма, которой иллюстрируется кроссплот с  в качестве оси X и
в качестве оси X и  в качестве оси Y, в этом случае различные наклоны будут считываться как
в качестве оси Y, в этом случае различные наклоны будут считываться как  ;
;
фиг. 18 - график, иллюстрирующий результаты псевдонормирования, при котором норму принимают равной  и когда эти точки данных отображают при норме выше заданного порога
и когда эти точки данных отображают при норме выше заданного порога  шума, согласно примеру варианта осуществления;
шума, согласно примеру варианта осуществления;
фиг. 19 - график, иллюстрирующий результаты псевдонормирования, при котором норму принимают равной и когда эти точки данных отображают при норме выше заданного порога  шума, согласно примеру варианта осуществления;
шума, согласно примеру варианта осуществления;
фиг. 20 - график, иллюстрирующий результаты псевдонормирования, при котором норму принимают равной и когда эти точки данных отображают при норме выше заданного порога  шума, согласно примеру варианта осуществления;
шума, согласно примеру варианта осуществления;
фиг. 21 - график, на котором показаны кластеры истинно нормированных картин (в противоположность псевдонормированным), соответствующих перестановкам пар различных x-составляющих, где  приравнено к объему фильтрата бурового раствора на нефтяной основе, принимающего участие в перестановках пар x-составляющих, согласно примеру варианта осуществления;
приравнено к объему фильтрата бурового раствора на нефтяной основе, принимающего участие в перестановках пар x-составляющих, согласно примеру варианта осуществления;
фиг. 22 - график, иллюстрирующий, каким образом идентифицируют и затем корректируют объединенные влияния водородного индекса и поляризационного фактора согласно примеру варианта осуществления;
фиг. 23 - последовательность действий в примере способа определения объемных параметров флюидов согласно примеру варианта осуществления;
фиг. 24 и 25 - графики, на которых показано интегрирование распределения Т2 по глубине с последующим интегрированием по кумулятивным Т2, соответственно, согласно примеру варианта осуществления;
фиг. 26А-26F - графики, на которых показаны распределения Т2, выбранные на протяжении представляющих интерес зон и по результатам различных проходов (прохода при бурении и прохода при очистке), для межзонного, связанного ограничениями извлечения мод согласно примеру варианта осуществления;
фиг. 27А-27Н - графики, иллюстрирующие результаты подбора из различных зон и проходов (прохода при бурении и прохода при очистке), отображенные совместно, включающие в себя нижележащие извлеченные гауссовы моды, показанные на графиках из фиг. 28А и 28В;
фиг. 29 и 30 - графики с представлением связанных кажущихся сигнатур ядерного магнитного резонанса для составляющих различных флюидов, нормированных относительно единицы (то есть 100 единиц пористости), согласно примеру варианта осуществления;
фиг. 31 - график, показывающий элементный анализ объемных параметров флюидов для кажущихся объемов флюидов согласно примеру варианта осуществления;
фиг. 31В - график, показывающий элементный анализ объемных параметров флюидов для скорректированных кажущихся объемов флюидов после перераспределения отрицательных значений при использовании ковариационной матрицы из фиг. 32;
фиг. 32 - визуальное представление ковариационной матрицы вычисленных кажущихся объемов согласно примеру варианта осуществления;
фиг. 33 - график, показывающий пример конечного анализа объемных параметров флюидов, предназначенного для нахождения истинных объемов флюидов после коррекции корректируемых кажущихся объемов флюидов за соответствующие объединенные влияния водородного индекса (ВИ) и поляризационного фактора;
фиг. 34 - графики с представлением объединения результатов конечного анализа объемных параметров флюидов и минералогии породы из данных спектроскопии захвата тепловых нейтронов для элементов в объединенный элементный анализ объемных параметров, в котором учитываются имеющиеся флюиды и составляющие основной массы породы, согласно примеру варианта осуществления;
фиг. 35 - структурная схема приведенной для примера компьютерной системы, которую можно использовать для реализации различных действий, описанных в этой заявке; и
фиг. 36 - блок-схема последовательности действий, иллюстрирующая аспекты примера способа, связанного с системой из фиг. 1.
Подробное описание
Настоящее описание выполнено с обращением к сопровождающим чертежам, на которых показаны примеры вариантов осуществления. Однако можно использовать многие другие варианты осуществления и поэтому описание не следует интерпретировать как ограниченное вариантами осуществлениями, изложенными в этой заявке. Точнее, эти варианты осуществления представлены таким образом, что это раскрытие является полным и законченным. На всех чертежах одинаковыми позициями обозначены подобные элементы.
Вообще говоря, в этой заявке изложен способ скважинного каротажа геологического пласта, имеющего ствол скважины, который может включать в себя сбор моментальных снимков ядерного магнитного резонанса (ЯМР), таких как периодически получаемые моментальные снимки или моментальные снимки ядерного магнитного резонанса с многочисленных глубин исследования (МГИ), показывающие изменения в геологическом пласте. Способ может также включать в себя выявление различия между различными данными, регистрируемыми в разные моменты времени или с различных глубин исследования (ГИ), и идентификацию множества флюидов в геологическом пласте, в том числе флюидов, объединенных сигнатурой водородного индекса (ВИ) и поляризационного фактора, на основании собранных данных ядерного магнитного резонанса, и способ может включать в себя способы псевдо- и истинного нормирования и методы статистического анализа с использованием многомерных гистограмм (например, гистограмм распределений ядерного магнитного резонанса) или схем классификации на основе нейронных сетей (НС), или факторный анализ, или анализ главных компонентов (АГК) для идентификации сигнатур замещения взаимных составляющих, и это может включать в себя определение на месте работ граничных значений распределения ядерного магнитного резонанса. Способ может также включать в себя определение соответствующих кажущихся, истинных и эффективных связанных сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, периодически собираемых или получаемых с многочисленных глубин исследования, например распределений Т2, и использование способов подбора эмпирической кривой (связанных или не связанных ограничениями), или факторного анализа или анализа главных компонентов (связанного или не связанного ограничениями), или вычисление пересечения двух или большего количества линий, присоединенных к одной и той же точке в двух- или многомерном пространстве, определение кажущихся объемов для идентифицированных флюидов на основании сигнатур Т2 и использование связанных данных ядерного магнитного резонанса или соответствующих исходных эхо-сигналов, определение скорректированных кажущихся объемов для идентифицированных флюидов на основании кажущихся объемов и использование ковариации кажущихся объемов, и определение истинных объемов для идентифицированных флюидов на основании скорректированных кажущихся объемов и водородных индексов (ВИ) и поляризационных факторов идентифицированных флюидов. Способ может также включать в себя идентификацию пространства пористости по данным ядерного магнитного резонанса, которое может быть представлено набором факторов, которое также может быть представлено в виде распределения с таким же количеством компонентов, как в рассматриваемых распределениях Т2 ядерного магнитного резонанса, основанных на собранных данных ядерного магнитного резонанса и на по меньшей мере одной из сигнатур Т2 идентифицированных несмачивающих флюидов или эффективных сигнатур Т2 смачивающих флюидов (например, групповых сигнатур), определение не зависящей от моментальных снимков кажущейся пористости по данным ядерного магнитного резонанса (не зависящей от вида флюида) на основании идентифицированного порового пространства ядерного магнитного резонанса и собранных данных ядерного магнитного резонанса, сбор скважинных каротажных данных, показывающих минералогию геологического пласта (таких как данные спектроскопии захвата тепловых нейтронов или данные каротажа по буровому раствору), и определение не зависящей от моментальных снимков истинной пористости по данным ядерного магнитного резонанса, скорректированной за влияние минералогии основной массы породы, на основании вычисленной, не зависящей от моментальных снимков кажущейся пористости по данным ядерного магнитного резонанса.
Кроме того, предложены связанные скважинная каротажная система и нетранзиторный считываемый компьютером носитель. Используемое в этой заявке выражение «данные ядерного магнитного резонанса», применяемое во всем этом изложении, представлено в общем виде для согласования с объемом возможных последовательных действий при ядерном магнитном резонансе. Кроме того, современные данные ядерного магнитного резонанса, получаемые с использованием последовательностей КПМГ (последовательностей Карра-Парселла-Мейбума-Гилла) обычно включают в себя исходные эхо-сигналы, которые затем могут быть преобразованы в оконные суммы, которые при соответствующих обстоятельствах в свою очередь затем могут быть преобразованы в одномерные распределения во времени продольной релаксации (так называемые распределения Т1), или одномерные распределения во времени поперечной релаксации (так называемые распределения Т2), или одномерные распределения постоянной диффузии, или многомерные сочетания их (в этом случае выражение «распределение» может быть заменено выражением «карта»), которые в свою очередь могут быть использованы для вычисления бинов пористости по данным ядерного магнитного резонанса. Они линейно связаны друг с другом и поэтому должно быть понятно, что выражение «данные ядерного магнитного резонанса» охватывает, например, исходные эхо-сигналы, оконные суммы, распределения или карты и бины пористости.
На фиг. 1 показана система 40 на месте расположения скважины, в которой могут быть реализованы различные варианты осуществления. В показанном примере место расположения скважины представляет собой место на суше, но способы, описанные в этой заявке, можно также использовать при нахождении места расположения скважины в море, на болоте или шельфе. Например, в этой приведенной для примера системе ствол 41 скважины образован в подземном или геологическом пласте 42 вращательным бурением. Как будет описано ниже, в некоторых вариантах осуществления также может использоваться направленное бурение.
Бурильная колонна 43 подвешена в стволе 41 скважины и имеет компоновку низа бурильной колонны (КНБК) 44, которая для примера включает в себя буровое долото 45 на нижнем конце. Кроме того, для примера система 40 включает в себя платформу и узел 46 буровой вышки, расположенные над стволом 41 скважины. Для примера узел 46 включает в себя роторный стол 47, ведущую трубу 48, буровой крюк 50 и вертлюг 51. Бурильная колонна 43 может вращаться с помощью роторного стола 47, который находится в зацеплении с ведущей трубой 48 на верхнем конце бурильной колонны. Для примера бурильная колонна 43 подвешена на буровом крюке 50, который прикреплен к талевому блоку (непоказанному) через ведущую трубу 48 и вертлюг 51, что позволяет бурильной колонне вращаться относительно бурового крюка. Например, систему верхнего привода (непоказанную) также можно использовать для вращения и осевого перемещения бурильной колонны 43.
В представленном примере система 40 может также включать в себя промывочную жидкость или буровой раствор 52, сохраняемый в колодце 53, образованном для этого на месте расположения скважины (или в резервуаре). Насос 54 подает буровой раствор 52 во внутреннее пространство бурильной колонны 43 через отверстие в вертлюге 51, заставляя буровой раствор протекать вниз по бурильной колонне, как показано направленной стрелкой 55. Буровой раствор выходит из бурильной колонны 43 через отверстия или сопла (непоказанные) в буровом долоте 45, а затем направляется вверх через кольцевое пространство (межтрубное пространство) между внешней поверхностью бурильной колонны и стенкой ствола скважины, как показано направленными стрелками 56. Буровой раствор смазывает буровое долото 45 и переносит обломки выбуренной породы на поверхность, где он очищается и возвращается в колодец 53 для повторного использования.
Согласно показанному варианту осуществления компоновка 44 низа бурильной колонны может включать в себя модуль 57 каротажа во время бурения (КВБ), модуль 58 измерений в процессе бурения (ИПБ), систему направленного бурения с регулируемым вращением или двигатель 60 и буровое долото 45.
Модуль 57 каротажа во время бурения может быть помещен в утяжеленную бурильную трубу специального типа, известную в данной области техники, и может включать скважинные каротажные приборы одного или нескольких видов. Кроме того, должно быть понятно, что необязательные модули 61 каротажа во время бурения и/или измерений в процессе бурения также могут использоваться в некоторых вариантах осуществления. (Повсюду при ссылке на модуль при позиции 57 также может иметься в виду модуль при позиции 61). Модуль 57 каротажа в процессе бурения может обладать функциональными возможностями измерения, обработки и сохранения информации, а также обмена информацией с наземным оборудованием, например, с блоком 62 регистрации каротажных данных и управления, который может включать в себя компьютер и/или другие процессоры для декодирования информации, передаваемой с модулей 57, 58 каротажа во время бурения и измерений в процессе бурения, а также регистрации и вычисления параметров на основании информации. Информация, представляемая с модулей 57, 58 каротажа во время бурения и измерений в процессе бурения, может передаваться к процессору 34 (который может находиться вне буровой площадки или в некоторых вариантах осуществления может находиться на буровой площадке как часть блока 62 регистрации каротажных данных и управления и т.д.) для определения информации об объемных параметрах, относящейся к составляющим в геологическом пласте 42, что будет дополнительно описано ниже.
В представленном варианте осуществления модуль 57 каротажа во время бурения может включать в себя электромагнитные или ядерные, или акустические устройства, и устройство измерения ядерного магнитного резонанса (ЯМР), подобное по конфигурации прибору, продаваемому под торговым знаком proVISION™ или MR Scanner™, которые являются торговыми знаками Schlumberger Technology Corporation, Шугар-Ленд, Техас, США. Сигналы могут передаваться из бурильной колонны 43 к блоку 62 регистрации каротажных данных и управления с использованием преобразователя 63 давления по проводной или беспроводной линии связи к блоку регистрации каротажных данных и управления, или может быть система передачи сигналов любого другого вида, известная в данной области техники, применимая для передачи сигналов от прибора, расположенного в буровой скважине, к наземному блоку, например система передачи по встроенному в бурильную трубу проводу (БТП). См., например, патент США №6866306 (Boyle et al.), который полностью включен в эту заявку путем ссылки.
Модуль 58 измерений в процессе бурения также может быть помещен в утяжеленную бурильную трубу специального типа, известную в данной области техники, и может включать в себя одно или несколько устройств для выполнения измерений характеристик условий бурения и параметров, таких как измерения механики бурения, измерения динамики бурения и других скважинных условий. Прибор для измерений в процессе бурения может также включать в себя установку (непоказанную) выработки электрической энергии для скважинной системы. Она может включать в себя турбинный генератор, приводимый в движение потоком бурового раствора, при этом понятно, что можно использовать другие энергетические и/или батарейные системы. Модуль 58 измерений в процессе бурения может включать в себя одно или несколько измерительных устройств следующих видов: например, устройство измерения нагрузки на долото, устройство измерения крутящего момента, устройство измерения ударов и вибрации, устройство измерения давления и/или температуры, устройство измерения частоты вращения (числа оборотов в минуту), устройство измерения расхода бурового раствора и устройство измерения направления и/или наклона.
Пример прибора 57 для каротажа удельного сопротивления во время бурения, основанного на эффекте распространения, показан на фиг. 2. В показанном примере между верхней и нижней излучающими антеннами ТХ1 и ТХ2 имеются верхняя и нижняя приемные антенны RX1 и RX2. Антенны образованы в выемках модифицированной утяжеленной бурильной трубы и расположены на магнитных сердечниках или изолирующем материале. Фазовым сдвигом электромагнитной волны между приемниками дается показатель удельного сопротивления пласта при относительно небольшой глубине исследования (и называемого удельным сопротивлением по сдвигу фазы, УССФ), а затуханием электромагнитной волны между приемниками дается показатель удельного сопротивления пласта при относительно большой глубине исследования (и называемого удельным сопротивлением по затуханию, УСЗ). К патенту США №4899112 (Clark et al.), полностью включенному в эту заявку путем ссылки, можно обратиться для получения дополнительных подробностей относительно описанного выше примера измерительного прибора. Во время работы сигналы, представляющие затухание, и сигналы, представляющие фазу, подаются на процессор, выход которого может быть соединен с телеметрической схемой.
В некоторых других приборах для электромагнитного (ЭМ) каротажа используют одну или несколько наклонных или поперечных антенн вместе с осевыми антеннами или без них. Эти антенны могут быть излучателями или приемниками. Наклонная антенна представляет собой антенну, дипольный момент которой не является ни параллельным, ни перпендикулярным к продольной оси прибора. Поперечная антенна представляет собой антенну, дипольный момент которой перпендикулярен к продольной оси прибора, а осевая антенна представляет собой антенну, дипольный момент которой параллелен продольной оси прибора. Трехкоординатная антенна представляет собой антенну, в которой три антенны (то есть, антенные рамки) расположены взаимно ортогонально. Часто одна антенна (рамка) является осевой, а две другие являются поперечными. Говорят, что две антенны имеют равные углы, если их векторы дипольных моментов пересекают продольную ось прибора под одинаковыми углами. Например, две наклонные антенны имеют одинаковые углы наклона, если их векторы дипольных моментов, имеющие начала, концептуально прикрепленные к точке на продольной оси прибора, лежат на поверхности прямого кругового конуса, центрированного относительно продольной оси прибора и имеющего вершину в этой опорной точке. Поперечные антенны имеют равные углы 90°, и это справедливо независимо от их азимутальных ориентаций относительно прибора.
В этой заявке описаны система и способ для идентификации и по желанию калибровки по меньшей мере некоторых откликов (сигнатур) скважинного каротажного прибора на составляющие пласта на основании только измерений. Прежде чем пытаться идентифицировать сигнатуры (также называемые конечными точками) индивидуальных составляющих (также называемых конечными элементами), например флюидов и минералов, входящих в подземный пласт, можно попытаться идентифицировать картины, получающиеся в результате замещения взаимных составляющих (x-составляющих). Когда замещение происходит парами (то есть, когда одна составляющая I заменяет другую составляющую J), то при прочих равных условиях процедура эквивалентна сопоставлению одной составляющей по отношению к другой. Если один из откликов прибора на составляющую полностью охарактеризован, можно получать отклики прибора относительно другой составляющей.
Можно использовать консонантные измерения (то есть, истинно консонантные или по существу консонантные). Истинно консонантные измерения определяются как измерения с одинаковой глубиной исследования (ГИ) и следовательно, они в равной степени находятся под влиянием, например, проникновения фильтрата бурового раствора (проникновением фильтрата бурового раствора именуется перемещение и вторжение буровых растворов в поровые пространства пласта, при этом сетка такого порового пространства действует подобно фильтру, который пропускает твердые частицы, присутствующие в составах буровых растворов, и захватывает фильтрат, вытесняющий естественные пластовые флюиды). Измерения поперечного сечения захвата тепловых нейтронов (также называемого СИГМА), плотности по данным нейтронного гамма-каротажа (также называемой ПНГК) и пористости по данным каротажа по тепловым нейтронам (такого как ПКТН), получаемые с прибора EcoScopeТМ от Schlumberger Technology Corporation, можно считать истинно консонантными измерениями. По существу консонантные измерения определяются как измерения при различных глубинах исследования и тем не менее в равной степени находятся под влиянием проникновения фильтрата бурового раствора благодаря, например, подстраивающим способам обработки, таким как способы коррекции за влияние проникновения, или же консонантные измерения могут быть результатом выполнения скважинных каротажных измерений в пласте одного вида несмотря на то, что фактические глубины исследования могут быть различными. Например, дело обстоит таким образом в случае, когда измерения находятся под очень слабым влиянием проникновения, а считывание всецело осуществляется в нетронутой зоне (зоне, не нарушенной проникновением фильтрата бурового раствора), или находятся под очень сильным влиянием проникновения, а считывание всецело осуществляется в зоне проникновения (зоне, испорченной проникновением фильтрата бурового раствора). Характеристики пласта, присутствующего на конкретной глубине, могут быть измерены, а наборы данных каротажных измерений собраны дважды или многократно в различные моменты времени или с различных глубин исследования (каждый такой собираемый набор данных каротажных измерений в дальнейшем будет называться в собирательном значении моментальным снимком), когда ожидается возникновение изменений состава пласта, например, вследствие проникновения фильтрата бурового раствора. Для описания характеристики такого изменения (изменений), которое может происходить, измерения из одного и того же моментального снимка могут быть консонантными, однако измерения из различных моментальных снимков могут не быть консонантными друг с другом. Измерения одновременно могут быть истинно консонантными и по существу консонантными, когда они имеют одинаковую глубину исследования и также отражают промытую зону или нетронутую зону. Поскольку данные ядерного магнитного резонанса в различных формах (то есть, имеющие отношение к исходным эхо-сигналам или оконным суммам, или распределениям, или бинам пористости) можно считать включающими многочисленные компоненты, каждый из которых можно рассматривать как отдельное и отличающееся измерение, данные ядерного магнитного резонанса составляют идеальный набор данных истинно консонантных измерений. Кроме того, когда используют градиентные устройства ядерного магнитного резонанса (такие как приборы proVISIONТМ или MR ScannerТМ, рассмотренные ранее), резонансный объем ядерного магнитного резонанса представляет собой тонкую цилиндрическую оболочку, окружающую прибор, которая фактически может быть маской для проникновения фильтрата бурового раствора (то есть, может не находиться под влиянием проникновения), при этом неглубокое проникновение остается ниже глубины исследования при измерении ядерного магнитного резонанса, или же резонансный объем полностью находится под влиянием проникновения фильтрата бурового раствора при проникновении на глубину, превышающую глубину исследования при измерении ядерного магнитного резонанса, и данные ядерного магнитного резонанса в этом случае можно считать истинно или по существу консонантными.
Можно заметить, что на первый взгляд сложность проблемы должна возрастать при переходе к идентификации картин, получающихся в результате замещения x-составляющих, и должна быть соизмеримой с количеством имеющихся составляющих, но это не тот случай. Например, при наличии Z составляющих будут возможными Z×(Z-1) перестановок пар x-составляющих, число которых намного больше, чем Z (Z×(Z-1) упорядоченных пар, или вдвое меньше числа разупорядоченных пар), но по своему характеру и на практике очень небольшое число таких перестановок пар x-составляющих будет соответствовать рассматриваемому случаю. Вследствие миграции и замещения флюидов на всем протяжении шкалы геологического времени и в связи с тем, что относительная проницаемость различных флюидов в коллекторе повышается в зависимости от насыщения соответствующего флюида, распределения имеющихся в настоящее время естественных флюидов внутри подземных пластов являются такими, что на любой одной глубине в таких пластах один из естественных пластовых флюидов в пласте является преимущественно подвижным, а другие, уже вытеснены на протяжении геологического времени после отложения осадков и захоронения, и созревания и миграции углеводородов. Кроме того, любой проникающий флюид, нарушающий или изменяющий исходный баланс пластовых флюидов (то есть, равновесное распределение флюидов, соответствующее шкале геологического времени), может быть известен, поскольку его можно инжектировать с поверхности или добывать на поверхность.
С другой стороны, обычно трудно непосредственно выделить сигнатуры составляющих отдельных флюидов, поскольку независимо от баланса коллектора, рассмотренного выше, они могут не присутствовать вовсе или они могут не иметься в достаточном количестве в объеме пласта, измеряемого каротажными приборами. Это обычно относится к случаю выполнения операций бурения на репрессии (то есть, к случаю, когда гидростатическое давление бурового раствора превышает давление естественных пластовых флюидов), и эта проблема осложняется при обычном каротаже с зондом на кабеле. Если вместо этого использовать бурение на депрессии (при которой гидростатическое давление бурового раствора меньше, чем давление естественных пластовых флюидов) или использовать скважинные каротажные измерения, подходящие для существующих способов коррекции за влияние проникновения (такие как способ, описанный в патенте США №8005618 В2 под названием ″Logging while drilling system″ (Kais Gzara), который полностью включен в эту заявку путем ссылки), то ситуация будет другой, и одна преобладающая составляющая флюида будет вносить наибольший вклад в измерения каротажными приборами. Однако даже в такой ситуации отсутствие информации относительно точного количества имеющейся составляющей флюида будет препятствием к получению характеристик отклика от этого флюида при скважинном каротаже. Кроме того, на картинах, получаемых в результате замещения x-составляющих, видно, что другие не замененные составляющие, оставшиеся на месте, могут не вносить вклада в измерения каротажным прибором, и это уменьшает сложность, которая в противном случае возникла бы вследствие попытки нахождения решения для множества составляющих одновременно. Как и в случае замещения x-составляющих парами, картина, получающаяся в результате замещения x-составляющих, просто связана с сигнатурой замещающей составляющей при скважинных измерениях за вычетом сигнатуры замещенной составляющей при скважинных измерениях.
Особая ситуация возникает, когда сигнатура каротажных измерений для конкретной составляющей не является вполне определенной (или не является однозначной), а изменяется в зависимости от времени или глубины исследования, даже когда замещение x-составляющих происходит парами. Например, это относится к случаю измерений ядерного магнитного резонанса, когда сигнатура смачивающего флюида обычно зависит от насыщения (парциального объема порового пространства, занятого конкретным флюидом) этой конкретной составляющей флюида. Например, когда один такой флюид заполняет поры хорошо сортированного песчаникового пласта, каротажные измерения ядерного магнитного резонанса, например распределения Т2, будут содержать один отклик (например единственный максимальный отклик, расположенный в свободной от флюида части распределения Т2). Однако при наличии в поровых пространствах или проникновении в поровые пространства другого несмачивающего и несмешивающегося флюида, вытесняющего тонкопленочный остаток (и остающегося позади него) исходного смачивающего флюида, который покрывает и облицовывает поверхность песчаных зерен, отклик каротажных измерений ядерного магнитного резонанса на остаточные флюиды будет другим (то есть, может иметься единственный максимальный отклик, расположенный на краю части связанных флюидов распределения Т2). Обратное также справедливо.
Эту особенность ядерного магнитного резонанса можно рассматривать и обрабатывать по меньшей мере двумя способами. Ее можно рассматривать как замещение x-составляющих, при этом замещение происходит триплетами, в соответствии с чем смачивающая жидкость, первоначально заполнявшая поры пласта, заменяется проникающим несмачивающим, несмешивающимся флюидом в дополнение к остаточному смачивающему флюиду, обрабатываемым как отдельная составляющая. В этом случае три составляющие имеют вполне определенный однопиковый отклик в каротажных измерениях ядерного магнитного резонанса, который по существу не меняется. Особенностью ядерного магнитного резонанса можно также считать замещение x-составляющих, при этом замещение происходит парами, в силу чего смачивающая жидкость, первоначально заполнявшая поры пласта, гипотетически подразделяется на свободные и связанные флюиды, так что свободный флюид заменяется проникающим несмачивающим, неперемешивающимся флюидом, а связанный флюид остается на месте. Однако в этом случае составляющая связанного флюида не может быть поставлена в соответствие вполне определенному однопиковому отклику в каротажных измерениях ядерного магнитного резонанса. Однако, когда один из моментальных снимков ядерного магнитного резонанса включает в себя только составляющую связанного флюида без какого-либо свободного смачивающего флюида, наблюдаемая картина замещения x-составляющих может стать вполне определенной несмотря на изменение сигнатуры смачивающего флюида в промежутке между отдельными моментальными снимками, что будет дополнительно показано в настоящем описании ниже.
Другой возможной причиной, по которой отклик в каротажных измерениях ядерного магнитного резонанса на составляющую конкретного флюида может изменяться в промежутке между различными скважинными каротажными измерениями, является возникновение ограниченной диффузии, когда насыщение такого конкретного флюида падает ниже определенного порога. Обратное также справедливо. Повлекут ли за собой диффузионные эффекты особые процедуры обработки, это может зависеть от технических характеристик каротажного прибора ядерного магнитного резонанса и используемого вида измерений. Диффузионные эффекты могут быть фактором, когда газ является одной из составляющих, присутствующих в пласте, однако отклик в каротажных измерениях ядерного магнитного резонанса на газ также оказывается относительно небольшим по амплитуде в сравнении с откликом от жидкости вследствие сочетания небольшого водородного индекса (ВИ) и низкого поляризационного фактора (ПФ), которые могут маскировать возможные диффузионные эффекты в газоносных пластах.
Еще одна причина, по которой отклик в каротажных измерениях ядерного магнитного резонанса на конкретную составляющую может изменяться в промежутке между различными моментальными снимками, связана с регистрацией данных и обработкой данных. Эти операции можно распространить на различия откликов в каротажных измерениях ядерного магнитного резонанса на многочисленные составляющие, начиная с одного моментального снимка ядерного магнитного резонанса и заканчивая следующим, несмотря на то, что в действительности изменения составляющих могут не происходить. Эти различия обычно проявляются как остаточные низкоамплитудные когерентные пульсации или волны (пики и впадины), когда распределения Т2 ядерного магнитного резонанса, например, из различных моментальных снимков ядерного магнитного резонанса берут и вычитают друг из друга. Изменения от одного моментального снимка к следующему обычно касаются увеличения или сокращения соответствующей ширины моды (ширин мод) на распределениях ядерного магнитного резонанса, при этом создаются относительно небольшие или обусловленные свойствами сдвиги положений пика моды (пиков мод) для каждого случая отдельно. Следует ожидать корреляцию между такими родственными модами из различных моментальных снимков и поэтому можно избегать влияния изменений, обусловленных регистрацией каротажных данных и обработкой. Способ зависит от наблюдения данных в пространстве распределения во времени релаксации ядерного магнитного резонанса или в пространстве амплитуд спиновых эхо ядерного магнитного резонанса, при этом каждое наблюдение имеет свои преимущества. Наблюдение данных ядерного магнитного резонанса в пространстве амплитуд спиновых эхо позволяет исследовать эффекты, в общем случае связанные с параметрами обработки данных или, в частности, с различными параметрами регуляризации. Наблюдение данных ядерного магнитного резонанса в пространстве распределения во времени релаксации помогает при управляемом режимом (или даже полностью предсказуемом) моделировании.
Изменения параметров регистрации, видов скважинных каротажных приборов и окружающих условий следует по возможности исключать или же в противных случаях учитывать их. Если изменения неизбежны, следует регистрировать новую базовую каротажную диаграмму сразу после того, как это станет практически возможным, при этом идея заключается в измерении пласта дважды при по существу отсутствии изменений или при минимальных ожидаемых изменениях между составляющими пласта, при двух различных наборах условий, чтобы регистрировать изменения откликов скважинного каротажного прибора вследствие изменений только условий. И опять, наблюдение данных ядерного магнитного резонанса в пространстве времени релаксации или постоянной диффузии в общем случае и методы статистического анализа или факторный анализ, или анализ главных компонентов, в частности, можно также использовать для содействия идентификации родственной моды и/или управляемому режимом (или даже полностью предсказуемому) моделированию.
В зависимости от многих возможных причин наблюдаемых изменений состава пласта между различными моментальными снимками способ и систему, раскрытые в этой заявке, можно применять к широкому ряду ситуаций. Действительно, наблюдаемые изменения могут быть обусловлены вытесненными флюидами, вытесненными из пласта мелкозернистыми твердыми частицами, проникновением мелкодисперсного материала из бурового раствора, изменениями фазы порового флюида (такими как изменения, инициированные изменениями давления или температуры), химическими реакциями, растворением или осаждением (например, осаждением асфальтена, отложением накипи, растворением соли, кислотной обработкой) твердых компонентов или изменениями уплотнения или режимов давления или напряжения, и временная шкала для наблюдаемых изменений может варьироваться в зависимости от рассматриваемой ситуации. Возможные источники и причины изменений, наблюдаемых между различными моментальными снимками, показаны на фиг. 1А. В системе и способе можно устранять изменения в зависимости от времени (то есть когда один и тот же объем пласта измеряют в различные моменты времени, где первый момент времени можно распространить на базовую каротажную диаграмму), показанные по оси X, изменения в зависимости от радиальной глубины (то есть когда находящиеся все глубже и глубже объемы одного и того же пласта измеряют в один момент времени, в который можно получать различные наборы консонантных измерений для каждого из находящихся все глубже и глубже измеряемых объемов), показанные по оси Y, и изменения в зависимости от глубины буровой скважины (когда одна и та же составляющая присутствует и принимает участие в ожидаемых замещениях пары x-составляющих), показанные по оси Z. Полуцилиндрическими областями 71 на фиг. 1А представлены составные части подземного пласта, окружающего буровую скважину, в которых состав пласта может быть различным на единственной радиальной осесимметричной границе относительно буровой скважины, при этом объем измерения или зона исследования в пласте показана прямоугольником 72. Это может получаться, например, когда скважинная жидкость (то есть, фильтрат бурового раствора) проникает в пласт и вытесняет естественные пластовые флюиды с различной выраженностью, зависящей от различных характеристик скважинной жидкости и пласта и таких параметров, как состав, вязкость, давление, пористость, насыщение и проницаемость. Состав пласта может ступенчато изменяться на такой радиальной осесимметричной границе или же изменение может быть постепенным. Кроме того, в зависимости от изменений скважинной жидкости или в зависимости от различных явлений, связанных с проницаемостью флюидов, или в зависимости от причины наблюдаемых изменений (например, химических реакций) состав пласта может изменяться на многочисленных радиальных осесимметричных границах (не только на одной) относительно буровой скважины. Другие сочетания сценариев, таких как изменения в зависимости от времени или изменения в зависимости от радиальной глубины, также могут иметься. В дополнение к этому организация каротажа в эксплуатационных скважинах и оптимизация бурения в сопоставлении с оценкой пласта, связаны сами по себе, соответственно, с содержимым буровой скважины во время добычи или нагнетания и с содержимым буровой скважины в процессе бурения в отличие от составляющих пласта. Систему и способ, описанные в этой заявке, можно применять в области каротажа в эксплуатационных скважинах и/или при оптимизации бурения (например, при очистке ствола и обнаружении выброса).
Изменения в зависимости от времени могут наводиться, например, нагнетанием, добычей или термомеханическим осаждением. Наведенные нагнетанием изменения могут происходить на всем протяжении небольшой временной шкалы или большой временной шкалы. Примеры наведенных нагнетанием изменений в рамках небольшой временной шкалы связаны с динамикой проникновения (например, с проходом при бурении в противоположность проходу при очистке или с регистрацией каротажных данных при повторном проходе в случае обычного бурения на репрессии), способами воздействия на пласт или нагнетания растворителя (например, проникновения, связанного с динамикой химической реакции) и способами каротаж-нагнетание-каротаж (то есть многочисленными циклами проникновения соответствующих целевому назначению проникающих в пласт жидкостей). Пример изменения в рамках большой временной шкалы связан с мониторингом коллектора в нагнетательных скважинах. Аналогичным образом, наведенные добычей изменения могут происходить на всем протяжении небольшой временной шкалы или большой временной шкалы. Примеры наведенных добычей изменений в рамках небольшой временной шкалы включают в себя изменения в процессе бурения на депрессии и наведенные давлением изменения (такие как расширение газа, образование зоны конденсата, выход газа из раствора, образование конуса обводнения и образование зон поглощения). Пример изменения в рамках большой временной шкалы связан с мониторингом коллектора в продуктивных скважинах. Наведенные термомеханическим осаждением изменения включают в себя наведенные температурой изменения в рамках небольшой временной шкалы (такие как таяние и плавление льда или гидратов) и наведенные температурой изменения в рамках большой временной шкалы (такие как изменения свойств тяжелой нефти при использовании способов термического воздействия на пласт). Кроме того, наведенные термомеханическим осаждением изменения могут включать в себя наведенные напряжением изменения в рамках большого временного масштаба.
Аналогичные примеры можно привести для изменений, зависящих от радиальной глубины. Случай изменений по глубине буровой скважины является до некоторой степени алогичным и обычно применим, когда специфическая точно одна и та же составляющая фактически имеется на многих различных глубинах буровой скважины, а другие составляющие поодиночке присутствуют на других глубинах буровой скважины (то есть, исключаются ситуации, когда две или большее количество составляющих имеются одновременно). В этом случае измерения, выполняемые на любой одной глубине, могут быть просто исходными данными в противоположность гипотетической ситуации, при которой одна и та же составляющая занимает весь объем пласта. Даже когда конкретная природа этой одной и той же составляющей известна приблизительно, факт выполнения измерений при наличии одной и той же составляющей является достаточным для использования настоящего способа. На практике, в случае, когда точно одна и та же составляющая, присутствующая на различных глубинах вдоль буровой скважины, является породным минералом, то состав такого одного и того же породного минерала можно определять или дифференцировать на основании скважинных каротажных данных, в которых имеется отклик преимущественно на породные минералы. Примеры таких каротажных данных включают в себя, но без ограничения ими, данные элементной спектроскопии захвата тепловых нейтронов и спектроскопии естественного гамма-излучения. Кроме того, состав породных минералов можно дифференцировать на основании наблюдения за поверхностью, например, но без ограничения ими, по данным кернового анализа и данным анализа проб бурового раствора (в частности, анализа обломков выбуренной породы). Кроме того, в случае, когда одна и та же составляющая, имеющаяся на различных глубинах вдоль буровой скважины, является флюидом, то вид такого одного и того же флюида на практике можно дифференцировать на основании данных скважинных каротажных измерений, в которых имеются отклики преимущественно на флюиды, таких как данные прибора для опробования пласта. Кроме того, вид флюида можно дифференцировать, например, на основании наблюдений за поверхностью, на основании анализа добываемых флюидов или данных анализа проб бурового раствора и анализа возвращающегося бурового раствора. Кроме того, вид такого флюида, например фильтрата бурового раствора, можно легко определять, поскольку он нагнетается с поверхности в случае обычного бурения на репрессии.
Если состав одного и того же минерала (то есть, минералогию породы) можно с уверенностью определять, изменения в каротажных измерениях можно использовать для идентификации и различения разных флюидов друг от друга. Кроме того, изменения вида флюида, включая заметные вариации пористости (парциального объема порового пространства в пласте), можно также использовать для назначения однозначной сигнатуры составу упомянутого выше породного минерала с учетом различных рассмотренных каротажных измерений. С другой стороны, если один и тот же вид флюида можно с уверенностью определять, изменения в каротажных измерениях можно использовать для идентификации и различения составов различных породных минералов. Кроме того, изменения минералогии, включая заметные вариации пористости, также можно использовать для придания однозначной сигнатуры виду упомянутого выше флюида с учетом рассмотренных различных каротажных измерений.
Для идентификации и классификации изменений, которые происходят, в настоящем примере можно ввести векторное обозначение  , которое согласовывает соответствие различным рассматриваемым измерениям m1, m2,…mα, mβ,…mn (от 1 до n), а моментальные снимки можно обозначить с использованием векторных обозначений в виде
, которое согласовывает соответствие различным рассматриваемым измерениям m1, m2,…mα, mβ,…mn (от 1 до n), а моментальные снимки можно обозначить с использованием векторных обозначений в виде  (от 1 до N), тогда как однозначные сигнатуры различных составляющих пласта с учетом рассмотренных различных каротажных измерений можно обозначить с использованием аналогичных векторных обозначений в виде
(от 1 до N), тогда как однозначные сигнатуры различных составляющих пласта с учетом рассмотренных различных каротажных измерений можно обозначить с использованием аналогичных векторных обозначений в виде  (от А до Z). Кроме того,
(от А до Z). Кроме того,  может представлять само или любое линейное преобразование его. Когда сигнатуры объема и некоторых составляющих в каротажных измерениях известны априори, обозначение может также охватывать такие преобразования, которыми из удаляются вклады этих известных составляющих с получением менее сложного вектора , который зависит от остающихся неизвестных составляющих.
может представлять само или любое линейное преобразование его. Когда сигнатуры объема и некоторых составляющих в каротажных измерениях известны априори, обозначение может также охватывать такие преобразования, которыми из удаляются вклады этих известных составляющих с получением менее сложного вектора , который зависит от остающихся неизвестных составляющих.
Кроме того, указанные выше векторы можно отображать как кривые по всем n точкам данных, принимающим ряд значений m1, m2,…mα, mβ,…mn, и в этом случае векторное обозначение может быть отброшено и заменено соответствующими обозначениями кривых  , и
, и  , и
, и  . Приведенным выше представлен пример возможного отображения многокомпонентных данных ядерного магнитного резонанса, а термин «распределение» («распределения») используется в этой заявке относительно связанных (соответствующих) кривых. В настоящем описании рассмотренные консонантные каротажные измерения m1, m2,…mα, mβ,…mn также могут быть сделаны безотносительными к единицам измерения или безразмерными путем нормирования измерений на значение шума, обязательно присутствующего в измерении каждого вида. Это способствует сохранению различных измерений выше уровня присущего шума и предотвращению искажения шумом достоверной информации. Это также полезно при отображении рассмотренных выше векторов или функций в нейтральном или не зависящем от пользователя масштабе. Заметим, что упомянутое выше нормирование измерений отличается от других нормирований, применяемых позднее в настоящем описании, таких как псевдонормирование сигнатур или истинное нормирование сигнатур (включая два отдельных вида истинного нормирования с использованием кажущегося или истинного объема фильтрата бурового раствора в соответствии с примером варианта осуществления).
. Приведенным выше представлен пример возможного отображения многокомпонентных данных ядерного магнитного резонанса, а термин «распределение» («распределения») используется в этой заявке относительно связанных (соответствующих) кривых. В настоящем описании рассмотренные консонантные каротажные измерения m1, m2,…mα, mβ,…mn также могут быть сделаны безотносительными к единицам измерения или безразмерными путем нормирования измерений на значение шума, обязательно присутствующего в измерении каждого вида. Это способствует сохранению различных измерений выше уровня присущего шума и предотвращению искажения шумом достоверной информации. Это также полезно при отображении рассмотренных выше векторов или функций в нейтральном или не зависящем от пользователя масштабе. Заметим, что упомянутое выше нормирование измерений отличается от других нормирований, применяемых позднее в настоящем описании, таких как псевдонормирование сигнатур или истинное нормирование сигнатур (включая два отдельных вида истинного нормирования с использованием кажущегося или истинного объема фильтрата бурового раствора в соответствии с примером варианта осуществления).
На фиг. 2А показаны обычные наложения, отображающие индивидуальные отклики при каротаже на каждую составляющую (сигнатуры векторов), и хотя они отображены на фиг. 2А в двумерной плоскости (то есть, на поверхности страницы, на которой они напечатаны), предполагается, что наложение находится в n-мерном пространстве для согласования с n рассмотренными каротажными измерениями m1, m2,…mα, mβ,…mn. Эти наложения используют для нанесения на кроссплот точек данных, соответствующих каждому из моментальных снимков, которые фактически являются линейной смесью различных конечных точек  составляющих, взвешенных в соответствии с выраженным в процентах объемом соответствующей составляющей, присутствующей в исследуемом объеме на соответствующем моментальном снимке. (Серые) линии, соединяющие различные векторы, соответствуют направлению, параллельному перестановке пары соответствующих x-составляющих (замещению x-составляющих), например, линии, заканчивающиеся в А, В, I, J и Z. Это дополнительно детализировано на фиг. 2В.
составляющих, взвешенных в соответствии с выраженным в процентах объемом соответствующей составляющей, присутствующей в исследуемом объеме на соответствующем моментальном снимке. (Серые) линии, соединяющие различные векторы, соответствуют направлению, параллельному перестановке пары соответствующих x-составляющих (замещению x-составляющих), например, линии, заканчивающиеся в А, В, I, J и Z. Это дополнительно детализировано на фиг. 2В.
Если предположить выполнение измерений с использованием линейных правил смешивания, то в таком случае изменения можно выразить в виде линейного сочетания векторов  как:
как:
 ,
,
 ,
,
при этом прогнозируется, что приведенное выше выражение не является однозначным, поскольку векторы являются взаимозависимыми. Например, введенное обозначение  относится к различию каротажных измерений между соответствующими моментальными снимками под номером j и под номером i (то есть, различию между
относится к различию каротажных измерений между соответствующими моментальными снимками под номером j и под номером i (то есть, различию между  и
и  ), например, введенное обозначение
), например, введенное обозначение  относится к выраженному в процентах объему составляющей J, представленной в объеме исследуемого пласта соответствующим моментальным снимком под номером j, и, например, введенное обозначение Δij(VI) относится к отличию выраженного в процентах объема составляющей I, представленной соответственно в объеме исследуемого пласта соответствующими моментальными снимками под номером j и под номером i.
относится к выраженному в процентах объему составляющей J, представленной в объеме исследуемого пласта соответствующим моментальным снимком под номером j, и, например, введенное обозначение Δij(VI) относится к отличию выраженного в процентах объема составляющей I, представленной соответственно в объеме исследуемого пласта соответствующими моментальными снимками под номером j и под номером i.
Ниже приведено выражение для случая перестановки одной пары составляющих I и J:

Для улучшения первоначального понимания происходящей перестановки x-составляющих получающееся различие измерений, такое как , можно нанести на кроссплот в зависимости от модифицированного наложения из фиг. 2В, которое также предполагается наложением в n-мерном пространстве. Модифицированное наложение, включающее в себя векторы (или прямолинейный сегмент), обозначенные AB, BA,…,JZ, SJ,…, начиная с исходной точки О, можно получить репликацией (или перемещением) различных векторов из фиг. 2А на кроссплот, представленный на фиг. 2В, с началом в точке О. То есть, отображаются те же самые линейные сегменты из фиг. 2А, но линейные сегменты перенесены параллельно относительно начала, находящегося в той же самой точке, то есть, в центре кроссплота. Обозначением и кодированием различных линейных сегментов отражены соответствующие начальные и конечные точки из соответствующей фиг. 2А. Картины точек данных, получившиеся в результате перестановок пар x-составляющих, точно лежат на каждом соответствующем линейном сегменте.
На фиг. 2С-2F показано, как используются наложения, при этом картины и соответствующие кластеры 80c-80f точек данных выровнены по существу вдоль различных линейных сегментов, показывающих перестановки различных пар x-составляющих. На фиг. 2С-2F показано, каким образом способ, описанный в этой заявке, применяется к изменениям (в зависимости от глубины) между зонами, при этом одна и та же составляющая присутствует и принимает участие в прогностических заменах пар x-составляющих. На них показано, что в случае, когда минералогию породы можно с уверенностью различать, в облаке точек данных из индивидуальных скважинных каротажных измерений возникает упорядоченность без видимой структуры. На фиг. 2С показан пример точек данных, представляющих результаты измерений каротажными приборами, отображенные на обычном наложении, где в этом случае ось X и ось Y соответствуют измерениям пористости и объемной плотности, соответственно, по данным нейтронного каротажа. Показанными линиями объединены эталонные составляющие, которые могут встречаться в подземных пластах (соответствующих таким линиям замещения x-составляющих), но такие эталонные составляющие на самом деле могут не присутствовать в подземном пласте. Рассмотренными эталонными составляющими были песчаник (обозначенный П), известняк (обозначенный И), доломит (обозначенный Д) и вода, графическое изображение которой вынесено за границы показанного графика (точка воды должна быть расположена правее показанного графика), и следовательно три показанные линии должны соединяться в точке воды. То, что отображенные для примера точки данных не попадают на эталонные линии, означает, что при наличии реальных составляющих пласта отображены эталонные составляющие. На фиг. 2D-2F показаны те же самые точки данных из фиг. 2С, но с выделением по отдельности этих точек данных соответственно минералогии А, В и С породы, при этом минералогию породы можно с уверенностью различать. Точки данных отображены вместе с гипотетическим откликом самой породной формации.
Фиг. 2G-2I следуют из фиг. 2С-2F и на них показано, каким образом используют модифицированные наложения вместе в картинами и кластерами точек 80g-80i данных, выровненных сравнительно точно вдоль различных линейных сегментов, показывающих различные перестановки пар x-составляющих. На этих трех фигурах раздельно показаны линейные сегменты, соответствующие картинам, возникающим в результате перестановок пар x-составляющих, включая три минералогии А, В и С породы, соответственно. На фиг. G можно увидеть, что минералогия А породы представляет одну из составляющих и имеются идентифицированные флюиды четырех различных видов. Подобным образом на фиг. 2Н показаны линейные сегменты, соответствующие картинам, возникающим в результате перестановок пар x-составляющих, при этом минералогия В породы представляет собой одну из участвующих составляющих и имеются идентифицированные флюиды трех различных видов. Аналогичным образом на фиг. 2I показаны линейные сегменты, соответствующие картинам, возникающим в результате перестановок пар x-составляющих, при этом минералогия С породы представляет собой одну из участвующих составляющих, и опять идентифицированы флюида трех различных видов.
На фиг. 2J-2М представлена объединенная информация из фиг. 2С-2F и фиг. 2G-2I, отображающая картины перестановок пар x-составляющих на исходных обычных наложениях. Фиг. 2J-2L аналогичны фиг. 2G-2I, при этом использованы обычные и модифицированные наложения, соответственно. Они позволяют предполагать, каким образом линейные сегменты могут сходиться к общим точкам, показанным на фиг. 2М вместе с облаком 80m объединяемых точек, раскрывающим более упорядоченные картины. Например, фиг. 2N и 2Р включают в себя облака 80n и 80р, которые следуют из аналогичных примеров на фиг. 2С-2М и иллюстрируют, каким образом заметные вариации пористости можно использовать для калибровки на месте работы сигнатуры той же самой составляющей в каротажных измерениях, одновременно участвующей в прогностических перестановках пар различных x-составляющих.
Как показано на фиг. 2N, когда минералогию породы можно с уверенностью различать, но соответствующая сигнатура в каротажных измерениях не обязательно имеется на месте работы с высокой степенью достоверности, и когда изменения вида флюида сопровождаются также заметными вариациями пористости, то различные линейные сегменты, сопоставленные различным сегрегированным кластерам точек данных, соответствующих перестановкам различных пар x-составляющих, могут быть экстраполированы до соединения в одной точке, показывающей сигнатуру соответствующей минералогии в каротажных измерениях. В отличие от этого, как показано на фиг. 2Р, когда состав флюида можно с уверенностью различать, но соответствующая сигнатура в каротажных измерениях не обязательно имеется на месте работы с высокой степенью достоверности, и когда изменения минералогии породы сопровождаются также заметными вариациями пористости, то различные линейные сегменты, сопоставленные различным сегрегированным кластерам точек данных, соответствующих перестановкам пар различных x-составляющих, могут быть экстраполированы до соединения в одной точке, показывающей сигнатуру соответствующего вида флюида в каротажных измерениях.
Кроме того, могут возникать ситуации, в которых одна и та же составляющая, принимающая участие в прогностических перестановках пар x-составляющих, может быть определена с высокой степенью достоверности без необходимости иметь подробные сведения относительно ее однозначной сигнатуры с учетом рассмотренных различных каротажных измерений. Способ, описанный в этой заявке, также можно использовать для этих случаев. С математической точки зрения он включает в себя использование новых технологий для одновременного приведения в соответствие многочисленных сегрегированных кластеров точек данных при наличии сходимости двух или большего количества линий, соединяемых в общей точке двух- или многомерного пространства. При работе с данными ядерного магнитного резонанса можно расширить терминологию и говорить о сходящихся распределениях (или других формах многокомпонентных данных ядерного магнитного резонанса), объединяемых в общее распределение на основе понимания, что данные ядерного магнитного резонанса можно также считать векторами или точками данных в многомерном пространстве.
Поскольку точки данных из результирующих различий измерений, таких как (различие каротажных измерений между моментальными снимками по номером j и под номеров i, то есть между и ), предназначенные для сборки в кластеры вместе с векторами из фиг. 2В (и идентификации, в какой паре составляющие I и J пласта замещают друг друга, между получаемыми периодически моментальными снимками или рассматриваемыми моментальными снимками при многочисленных глубинах исследования под номером j и под номером i), заранее известны, то, чтобы на практике эффективно различать эти кластеры друг от друга, может оказаться желательным вычисление гистограмм точек данных для каждого телесного угла в n-мерном пространстве или нормирование векторов точек данных на единичную длину (то есть, проецирование их на n-мерную единичную сферу) в соответствии с выражением:

Такое нормирование, которое ниже может называться псевдонормированием, может быть ограничено векторами точек данных, превышающими заданный порог шума, а норму  можно задавать рядом способов. То есть, также возможны альтернативное псевдонормирование или другие способы проецирования. Псевдонормированием можно определенно выявлять наличие некоторых картин замещения x-составляющих, когда замещение вытекает из заметных различий между моментальными снимками под номером j и под номером i. Кроме того, можно использовать другие статистические методы, такие как, например, факторный анализ или анализ главных компонентов (как описано в заявке №13/658502 на патент США под названием «Identifying formation, matrix and fluid related characteristics from subsurface data using factor analysis» (Jain et al.), которая была подана 23 октября 2012 года и переуступлена правопреемнику настоящей заявки и тем самым полностью включена в эту заявку путем ссылки, факторный анализ или анализ главных компонентов особенно подходит к данным ядерного магнитного резонанса). Факторный анализ или анализ главных компонентов можно применять для идентификации размерности соответствующего векторного пространства, вытекающей из различий измерений, таких как (то есть, числа главных факторов и главных компонентов, которые могут учитываться для большой части набора данных). Эта размерность может соответствовать числу составляющих, которые замещают друг друга между рассматриваемыми моментальными снимками под номером i и под номером j за вычетом единицы. Следует понимать, что размерность также может быть установлена с помощью посторонних эмпирических данных, таких как, например, данные каротажа по буровому раствору или обоснованные предположения. Кроме того, способы наклонного вращения можно применять для образования картин замещения различных имеющихся x-составляющих. Кроме того, технологии искусственных нейронных сетей (НС) можно использовать для автоматической сегрегации пласта на зоны в соответствии с картинами, получаемыми при обучении искусственной нейронной сети. Упомянутые выше статистические методы можно применять ко всему рассматриваемому интервалу глубин, или от зоны к зоне, или к скользящему интервалу глубин.
можно задавать рядом способов. То есть, также возможны альтернативное псевдонормирование или другие способы проецирования. Псевдонормированием можно определенно выявлять наличие некоторых картин замещения x-составляющих, когда замещение вытекает из заметных различий между моментальными снимками под номером j и под номером i. Кроме того, можно использовать другие статистические методы, такие как, например, факторный анализ или анализ главных компонентов (как описано в заявке №13/658502 на патент США под названием «Identifying formation, matrix and fluid related characteristics from subsurface data using factor analysis» (Jain et al.), которая была подана 23 октября 2012 года и переуступлена правопреемнику настоящей заявки и тем самым полностью включена в эту заявку путем ссылки, факторный анализ или анализ главных компонентов особенно подходит к данным ядерного магнитного резонанса). Факторный анализ или анализ главных компонентов можно применять для идентификации размерности соответствующего векторного пространства, вытекающей из различий измерений, таких как (то есть, числа главных факторов и главных компонентов, которые могут учитываться для большой части набора данных). Эта размерность может соответствовать числу составляющих, которые замещают друг друга между рассматриваемыми моментальными снимками под номером i и под номером j за вычетом единицы. Следует понимать, что размерность также может быть установлена с помощью посторонних эмпирических данных, таких как, например, данные каротажа по буровому раствору или обоснованные предположения. Кроме того, способы наклонного вращения можно применять для образования картин замещения различных имеющихся x-составляющих. Кроме того, технологии искусственных нейронных сетей (НС) можно использовать для автоматической сегрегации пласта на зоны в соответствии с картинами, получаемыми при обучении искусственной нейронной сети. Упомянутые выше статистические методы можно применять ко всему рассматриваемому интервалу глубин, или от зоны к зоне, или к скользящему интервалу глубин.
На фиг. 2Q показано, каким образом работает псевдонормирование, при котором норму принимают равной  , и когда эти точки данных отображаются при норме выше заданного порога
, и когда эти точки данных отображаются при норме выше заданного порога  шума. Такое псевдонормирование позволяет проецировать точки данных, соответствующие замещению одной и той же пары x-составляющих, на одну и ту же точку единичного круга (или единичной сферы). Для согласования с рассматриваемыми n каротажными измерениями показанное на фиг. 2Q предполагается находящимся в n-мерном пространстве. На фиг. 2R показано псевдонормирование, при котором норму принимают равной
шума. Такое псевдонормирование позволяет проецировать точки данных, соответствующие замещению одной и той же пары x-составляющих, на одну и ту же точку единичного круга (или единичной сферы). Для согласования с рассматриваемыми n каротажными измерениями показанное на фиг. 2Q предполагается находящимся в n-мерном пространстве. На фиг. 2R показано псевдонормирование, при котором норму принимают равной  , и когда эти точки данных отображаются при норме выше заданного порога
, и когда эти точки данных отображаются при норме выше заданного порога  шума. Показанное на фиг. 2R также предполагается находящимся в n-мерном пространстве.
шума. Показанное на фиг. 2R также предполагается находящимся в n-мерном пространстве.
Особенность ядерного магнитного резонанса, описанная ранее, может приводить к следующим модифицированным уравнениям:
 ,
,


(в которых «non-wetting fluids» означает «несмачивающие флюиды» и «wetting fluids» означает «смачивающие флюиды»), которые в случае несмачивающего флюида и в предположении, что второй, сделанный через промежуток времени или с другой из многочисленных глубин исследования моментальный снимок включает в себя только составляющую «связанного флюида» («bound fluid»), при исключении всякого «свободного смачивающего флюида» («free wettings fluid») сводятся к уравнению вида:
 ,
,
(в котором ″bwf” обозначает «граничный смачивающий флюид») и оно в очередной раз записывается как:
 .
.
Кроме того, член  , показанный выше, обычно связан с
, показанный выше, обычно связан с  в соответствии с выражением:
в соответствии с выражением:
 ,
,
(в котором нижний индекс «lm» означает «логарифмическое среднее»), где «а» можно считать относительно постоянным параметром (например, около 4,5), и формулы справедливы в пределах соответствующих времен объемной релаксации рассматриваемого смачивающего флюида. При использовании логарифмического среднего Т1 формула обеспечивает преимущество, заключающееся в свободе от диффузионных эффектов. Приведенные выше формулы были получены при приравнивании KSDR≈KTC (соответственно известного в отрасли как преобразование проницаемости исследовательского центра Шлюмберже-Долла (SDR) и преобразование проницаемости Тимура-Коатса (ТС)). Кроме того, для члена можно использовать другие, точно связанные выражения, которые можно получать на основании физики измерения ядерного магнитного резонанса.
Выражения, приведенные выше, служат для демонстрации того, что смачивающий флюид фактически ведет себя подобно составляющей с эффективной, вполне определенной сигнатурой в каротажных измерениях ядерного магнитного резонанса, как представлено выражением ниже:
 ,
,
которое включает в себя контринтуитивный двухпиковый отклик в каротажных измерениях ядерного магнитного резонанса, вместо всего лишь одного пика, и где один из пиков является положительным и другой пик является отрицательным вместо двух только положительных пиков. В таком случае способы кластеризации точек данных, способы псевдонормирования или другие статистические методы и способы классификации, рассмотренные ранее, также можно применять к измерениям ядерного магнитного резонанса.
На фиг. 3А-3D показаны наборы моделированных и полученных эффективных сигнатур 90a-90d распределения Т2 воды по измерениям ядерного магнитного резонанса, из которых видно, что они являются сравнимыми. В зависимости от фактических порогов или граничных значений Т2 для связанного флюида моделированные сигнатуры сохраняют такую же форму, но сдвигаются вправо или влево в зависимости от того, больше или меньше граничные значения Т2 связанного флюида, соответственно. Эти однозначные двухпиковые эффективные сигнатуры (включающие в себя один положительный пик и один отрицательный пик с коррелированными амплитудами) помогают провести различие между водой (например, смачивающим флюидом) и другими присутствующими несмачивающими флюидами (например, нефтью или газом). На фиг. 3А представлены различные моделированные эффективные сигнатуры воды за вычетом артефактов обработки, показанные аналогичными в пределах горизонтального сдвига. На фиг. 3В показаны моделированные артефакты обработки регуляризацией, иллюстрирующие, какие дополнительные пики и/или впадины могут получаться на практике. Чем меньше поровые пространства в пластах, тем более резко выражены эффекты, которые проявляются на графике, таком как на фиг. 3В.
Фиг. 3С содержит графики, показывающие эффективную сигнатуру воды, полученную с использованием примера скважинных каротажных данных, показанных на фиг. 4, и способов получения, описанных ниже. Кривая 91 идентична кривой 213, которая показана на фиг. 21, и кривая 92 представляет сигнатуру каротажных измерений ядерного магнитного резонанса для фильтрата бурового раствора на нефтяной основе (БРНО), полученную на такой же глубине при использовании способов, описанных ниже. Кривые 91, 92 были нормированы при использовании водородного индекса и поляризационного фактора, полученных из фиг. 22 и объединенных для реконструкции кривой 93 с использованием способов реконструкции, описанных ниже. На фиг. 3D показана моделированная эффективная сигнатура воды из фиг. 3С, отображенная для сравнения с фактической сигнатурой из фиг. 3С, и показано хорошее соответствие, выраженное кривой 94.
На фиг. 4 показаны наборы данных ядерного магнитного резонанса, использованные в этой заявке в качестве примеров. Дорожками, соответственно слева направо, отображаются кривая (дорожка 100) гамма-излучения, распределения Т2 ядерного магнитного резонанса по данным, зарегистрированным в процессе бурения буровой скважины (то есть, первое измерение - дорожка 101), распределения Т2 ядерного магнитного резонанса по результатам выполнения прохода при очистке (то есть, второе измерение - дорожка 102), и дифференциальное распределение Т2 ядерного магнитного резонанса между двумя, упомянутыми выше (то есть полученное в результате вычитания измерений при бурении из измерений после выполнения прохода при очистке, - дорожка 103). Заметим, что в случае выполнения прохода при очистке отдельные виды несмачивающих и смачивающих флюидов (несмачивающий фильтрат бурового раствора на нефтяной основе и вид (виды) остаточного углеводорода) в противоположность виду (видам) смачивающей связанной воды разделены в соответствии с граничным значением Т2 ядерного магнитного резонанса, составляющим приблизительно 90 мс.
На фиг. 5-10 показано применение способов псевдонормирования, описанных выше. На фиг. 5 представлено семейство графиков 105 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной  , и на которых отображены точки данных при норме выше заданного порога
, и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. 6 представлено семейство графиков 106 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной , и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. 7 представлено семейство графиков 107 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной  , и на которых отображены точки данных при норме выше заданного порога
, и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. 8 представлено семейство графиков 108 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной , и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. 9 представлено семейство графиков 109 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной , и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. 10 представлено семейство графиков 110 глубинного каротажа, которыми иллюстрируется псевдонормирование, при котором норма принята равной , и на которых отображены точки данных при норме выше заданного порога  шума.
шума.
На фиг. с 11 по 13 показаны псевдонормированные картины, соответствующие перестановкам пар различных x-составляющих. На фиг. 11 показаны выбранные картины 111, являющиеся результатом перестановок пар x-составляющих, полученные при использовании  . На фиг. 12 показаны выбранные картины 112, являющиеся результатом перестановок пар x-составляющих, полученные при использовании
. На фиг. 12 показаны выбранные картины 112, являющиеся результатом перестановок пар x-составляющих, полученные при использовании  . На фиг. 13 показаны выбранные картины 113, являющиеся результатом перестановок пар x-составляющих, полученные при использовании
. На фиг. 13 показаны выбранные картины 113, являющиеся результатом перестановок пар x-составляющих, полученные при использовании  .
.
Изменения, возникающие при регистрации или обработке каротажных данных, приводят к различным проблемам. Изменения при регистрации данных можно отрегулировать при принятии конкретного предположения, заключающегося в том, что измерения ядерного магнитного резонанса на основании первого каротажного измерения могут быть преобразованы в эквивалентные измерения на основании второго измерения или наоборот. Этот способ представляет собой по существу сравнение наборов данных ядерного магнитного резонанса, зарегистрированных вместе с гипотетическими аналогичными параметрами. С вызванными обработкой изменениями в общем случае можно справиться путем рассмотрения образующихся низкоамплитудных пиков и впадин в качестве только шума, при этом требуется соответствующее повышение порогового уровня для шума.
Одно последствие псевдонормирования заключается в том, что кластеры точек данных замещения x-составляющих, соответствующие параллельным векторам, могут не отличаться друг от друга. Кроме того, кластеры точек данных замещения x-составляющих, собираемые вокруг начала О и соответствующие паре составляющих с подобными свойствами, таких как естественная пластовая нефть, вытесненная фильтратом бурового раствора на нефтяной основе (БРНО), или естественная пластовая вода, вытесненная фильтратом бурового раствора на водной основе (БРВО), могут не отличаться достоверно от других кластеров точек данных, соответствующих другим перестановкам пар x-составляющих. Эти обстоятельства рассмотрены ниже.
В другом примере предполагается, что можно оценивать количественный показатель одной из составляющих, например составляющей J, которая принимает участие в замещении x-составляющей. В зависимости от встречающейся ситуации это можно осуществлять рядом способов, например, с использованием измерений ядерного магнитного резонанса, удельного сопротивления, сечения захвата тепловых нейтронов, диэлектрических измерений, измерений гамма-излучения, лито-плотностных/нейтронных измерений или акустических измерений. В этом случае другие свойства составляющих могут быть точно реконструированы и поэтому вводится выражение «истинное нормирование», в противоположность псевдонормированию, в соответствии с математическими выражениями:

и

где составляющая I представляет собой другую составляющую, принимающую участие в замещении, и также может быть распространена на другие составляющие. При этой реконструкции учитываются обстоятельства, рассмотренные выше, а именно, замещения различных x-составляющих приводят к параллельным векторам или ограниченный контраст между составляющими I и J приводит к векторам  .
.
На фиг. 16А показаны векторы  при истинном нормировании. Точки данных, получающиеся в результате истинного нормирования, которые до истинного нормирования могли быть объединены в кластеры вдоль линий замещения различных x-составляющих, теперь к тому же перегруппировываются и срастаются вокруг крупных отметок, показанных на фигуре. На фиг. 16В показано соотношение (соотношения)
при истинном нормировании. Точки данных, получающиеся в результате истинного нормирования, которые до истинного нормирования могли быть объединены в кластеры вдоль линий замещения различных x-составляющих, теперь к тому же перегруппировываются и срастаются вокруг крупных отметок, показанных на фигуре. На фиг. 16В показано соотношение (соотношения)  для сопоставления с фиг. 2А, иллюстрирующее, каким образом реконструируются сигнатуры надлежащих составляющих в каротажных измерениях. (Фиг. 16А была повернута на 180° для получения члена
для сопоставления с фиг. 2А, иллюстрирующее, каким образом реконструируются сигнатуры надлежащих составляющих в каротажных измерениях. (Фиг. 16А была повернута на 180° для получения члена  ).
).
Кроме того, может возникать такая ситуация, как при работе с измерениями ядерного магнитного резонанса, когда количественный параметр одной из составляющих, которые принимают участие в замещении x-составляющих, известен с точностью до постоянного множителя, но не с точностью до абсолютного значения. Например, объем фильтрата бурового раствора, показанный на распределениях ядерного магнитного резонанса, в случае обычного бурения на репрессии известен с точностью до водородного индекса и поляризационного фактора, которые к тому же могут не быть известны в скважинных условиях на месте работы. В таком случае объем фильтрата бурового раствора на распределения ядерного магнитного резонанса можно назвать кажущимся (apparent) объемом фильтрата бурового раствора в противоположность истинному объему фильтрата бурового раствора после выполнения коррекции за влияние водородного индекса и поляризационного фактора по изложенной выше причине.
В этом случае уравнения, приведенные выше, можно преобразовать к следующему виду:
 ,
,
 ,
,
И

Или
 ,
,
где HI обозначает водородный показатель и Pol обозначает поляризационный фактор, а  и
и  обозначают для составляющих I и J нормированные сигнатуры каротажных измерений ядерного магнитного резонанса (что в данном случае означает нормированные относительно 100 единиц пористости или в конкретном случае означает распределение ядерного магнитного резонанса с общей площадью под распределением ядерного магнитного резонанса, равной 100 единицам пористости), то есть, с исключением влияний водородного индекса и поляризационного фактора.
обозначают для составляющих I и J нормированные сигнатуры каротажных измерений ядерного магнитного резонанса (что в данном случае означает нормированные относительно 100 единиц пористости или в конкретном случае означает распределение ядерного магнитного резонанса с общей площадью под распределением ядерного магнитного резонанса, равной 100 единицам пористости), то есть, с исключением влияний водородного индекса и поляризационного фактора.
На фиг. 16С отображены векторы  для случая кажущегося (apparent) нормирования (в противоположность истинному нормированию) с использованием кажущегося объема фильтрата бурового раствора. Точки данных, полученные в результате моделирования, теперь объединены вокруг увеличенных (или уменьшенных, в зависимости от конкретного случая) крупных отметок, показанных на фигуре, по сравнению с истинным нормированием, которое включает в себя использование подходящего фильтрата бурового раствора. На фиг. 16D отображено соотношение (соотношения)
для случая кажущегося (apparent) нормирования (в противоположность истинному нормированию) с использованием кажущегося объема фильтрата бурового раствора. Точки данных, полученные в результате моделирования, теперь объединены вокруг увеличенных (или уменьшенных, в зависимости от конкретного случая) крупных отметок, показанных на фигуре, по сравнению с истинным нормированием, которое включает в себя использование подходящего фильтрата бурового раствора. На фиг. 16D отображено соотношение (соотношения)
 в противоположность фиг. 2А, иллюстрирующей, каким образом реконструируются кажущиеся сигнатуры каротажных измерений для составляющих. (Фиг. 16С повернута на 180° для получения члена ). Как можно видеть, реконструированные каротажные отклики все же располагаются вдоль векторов, показанных на заднем плане, это означает и подтверждает то, что они отличаются от истинных сигнатур каротажных измерений для составляющих постоянным или масштабирующим множителем, а именно, HIJ·PolJ. В таком случае достаточно, чтобы каротажный отклик ядерного магнитного резонанса от одной из составляющих, участвующих в замещениях x-составляющих, был известен, чтобы можно было определять масштабирующий множитель, используемый для реконструкции других истинных сигнатур каротажных измерений для связанных составляющих.
в противоположность фиг. 2А, иллюстрирующей, каким образом реконструируются кажущиеся сигнатуры каротажных измерений для составляющих. (Фиг. 16С повернута на 180° для получения члена ). Как можно видеть, реконструированные каротажные отклики все же располагаются вдоль векторов, показанных на заднем плане, это означает и подтверждает то, что они отличаются от истинных сигнатур каротажных измерений для составляющих постоянным или масштабирующим множителем, а именно, HIJ·PolJ. В таком случае достаточно, чтобы каротажный отклик ядерного магнитного резонанса от одной из составляющих, участвующих в замещениях x-составляющих, был известен, чтобы можно было определять масштабирующий множитель, используемый для реконструкции других истинных сигнатур каротажных измерений для связанных составляющих.
В этом месте можно сделать определенные выводы. Например, в методах статистического анализа и классификации, описанных ранее (с использованием гистограмм, схем классификации на основе искусственных нейронных сетей или методологии факторного анализа или анализа главных компонентов) также можно применять последующее истинное или кажущееся нормирование (в противоположность псевдонормированию), которое выражается соответственно как или , чтобы также идентифицировать эти картины замещения x-составляющих, которые можно упускать при использовании только псевдонормирования (то есть когда перестановки различных x-составляющих приводят к образованию параллельных векторов или когда ограниченный контраст между составляющими I и J приводит к образованию векторов ).
Фактически достаточно, чтобы сигнатура измерения ядерного магнитного резонанса одной из составляющих (обычно воды), принимающих участие в замещениях x-составляющих, была известна, чтобы можно было реконструировать другие сигнатуры измерений ядерного магнитного резонанса связанных составляющих, в соответствии с чем уточнения и поправки для водородного индекса и поляризационного фактора определяют сначала, а фактические отклики определяют во вторую очередь. Это можно выразить как:
 ,
,
 ,
,
 ,
,
где J представляет собой составляющую, замещающую составляющие I или K, а составляющая I представляет собой составляющую с известным априори HII·PolI, и в этом случае HIJ·PolJ определяют сначала, а другие HIK·PolK определяют во вторую очередь. Вновь введенный член  обозначает пористость, определяемую по данным ядерного магнитного резонанса (то есть общую площадь под распределением в конкретном случае распределений ядерного магнитного резонанса), а член обозначает различие пористости, определяемое по данным ядерного магнитного резонанса, между моментальными снимками под номером j и под номером i. Вновь введенные члены SlopeIJ pair exchange и SlopeKJ pair exchange имеют отношение к новому семейству кроссплотов с по оси X и по оси Y. Наклоны (slopes) соответствуют прямым линиям, проходящим через начало.
обозначает пористость, определяемую по данным ядерного магнитного резонанса (то есть общую площадь под распределением в конкретном случае распределений ядерного магнитного резонанса), а член обозначает различие пористости, определяемое по данным ядерного магнитного резонанса, между моментальными снимками под номером j и под номером i. Вновь введенные члены SlopeIJ pair exchange и SlopeKJ pair exchange имеют отношение к новому семейству кроссплотов с по оси X и по оси Y. Наклоны (slopes) соответствуют прямым линиям, проходящим через начало.
На фиг. 17А показано новое семейство кроссплотов с по оси x и по оси y. Точки данных, полученные в результате замещения (замещений) различных x-составляющих, образуют кластеры вдоль линий с различным наклоном в соответствии с HI·Pol каждой составляющей. Двумерную (2М) диаграмму из фиг. 17А можно распространить на многие измерения. В случае многомерных отображений можно рассматривать кластеры , векторов и гистограммы, построенные для каждого телесного угла. В другом полезном кроссплоте отложены по оси y, а отложены по оси x, и в этом случае, как показано на фиг. 17В, различные наклоны считываются как . На фиг. 17В показаны точки данных, полученные в результате замещения (замещений) различных x-составляющих, образования кластеров вдоль линий с различными наклонами в соответствии с HI·Pol каждой составляющей.
На фиг. 21, 22 и 3В при использовании практического примера последовательно показано, как это работает. Однако, хотя полученные поправки за влияния водородного индекса и поляризационного фактора, показанные на фиг. 21, можно считать достоверными, то же самое необязательно может быть справедливо относительно полученных откликов в каротажных измерениях ядерного магнитного резонанса вследствие неблагоприятных влияний обработки, которые упоминались ранее, в общем случае, и регуляризации, в частности. Особенностью ядерного магнитного резонанса определяется, что альтернативно отклики на различные флюиды при каротаже ядерного магнитного резонанса можно получать с использованием связанных ограничениями нелинейных способов подбора кривой на основе наименьших квадратов, примененных в примерах из фиг. с 26А по 26F и с 27А по 27Н, чтобы исключать эти неблагоприятные влияния. Эквивалент из фиг. 21 также можно выполнять в пространстве амплитуд спинового эха. То есть вместо вычитания распределений друг из друга сначала можно вычесть амплитуды последовательности эхо-сигналов друг из друга и затем выполнить обращение разностей последовательности эхо-сигналов. Некоторые ограничения можно ввести для исключения нестабильности инверсии от положительных и отрицательных амплитуд, одновременно присутствующих в такой разностной последовательности эхо-сигналов. Кроме того, в данном случае можно применить факторный анализ или анализ главных компонентов, в том числе связанные ограничениями.
На фиг. 18 представлено семейство графиков 180 глубинного каротажа, иллюстрирующих результаты псевдонормирования, при котором норму принимают равной  (то есть кажущемуся объему свободного флюида при использовании граничного значения Т2, составляющего 90 мс), и на этих графиках отображены точки данных при норме выше заданного порога
(то есть кажущемуся объему свободного флюида при использовании граничного значения Т2, составляющего 90 мс), и на этих графиках отображены точки данных при норме выше заданного порога  шума. На фиг. 19 представлено семейство графиков 190 глубинного каротажа, которыми иллюстрируются результаты псевдонормирования, где норма выбрана равной , и на этих графиках отображены точки данных при норме выше заданного порога
шума. На фиг. 19 представлено семейство графиков 190 глубинного каротажа, которыми иллюстрируются результаты псевдонормирования, где норма выбрана равной , и на этих графиках отображены точки данных при норме выше заданного порога  шума. На фиг. 20 представлено семейство графиков 199 глубинного каротажа, которыми иллюстрируются результаты псевдонормирования, где норма выбрана равной , и на этих графиках отображены точки данных при норме выше заданного порога
шума. На фиг. 20 представлено семейство графиков 199 глубинного каротажа, которыми иллюстрируются результаты псевдонормирования, где норма выбрана равной , и на этих графиках отображены точки данных при норме выше заданного порога  шума. На фиг. 21 показаны истинные нормированные картины 210, соответствующие перестановкам пар различных x-составляющих, где объем фильтрата бурового раствора на нефтяной основе, принимавшего участие в перестановках пар x-составляющих был приравнен к
шума. На фиг. 21 показаны истинные нормированные картины 210, соответствующие перестановкам пар различных x-составляющих, где объем фильтрата бурового раствора на нефтяной основе, принимавшего участие в перестановках пар x-составляющих был приравнен к  . Распределения, которые являются активными в коротком спектре распределения времени Т2, были исключены для защиты от шума и артефактов вследствие несоответствия по глубине. Картины 211-213 соответствуют арифметическому среднему исходных (то есть, менее затененных) кривых. На картинах 210 виден оттенок на двух различных несмачивающих углеводородных флюидах и одном смачивающем флюиде (воде).
. Распределения, которые являются активными в коротком спектре распределения времени Т2, были исключены для защиты от шума и артефактов вследствие несоответствия по глубине. Картины 211-213 соответствуют арифметическому среднему исходных (то есть, менее затененных) кривых. На картинах 210 виден оттенок на двух различных несмачивающих углеводородных флюидах и одном смачивающем флюиде (воде).
На фиг. 22 показано, каким образом объединенные влияния водородного индекса и поляризационного индекса идентифицируют и затем корректируют. Точки данных, соответствующие флюидам с одинаковым значением HI·Pol, образуют кластеры вдоль линий с идентичными наклонами или они могут приводить к образованию характерных пиков (или колебаний) на гистограмме соответствующих наклонов. В этом случае ось X соответствует кажущемуся объему фильтрата бурового раствора на нефтяной основе по результатам выполнения прохода при очистке, а ось Y соответствует изменению пористости по данным ядерного магнитного резонанса между проходом при бурении и проходом при очистке. Точка воды принимается отражающей объединенные водородный индекс и поляризационный фактор, составляющую единицу (то есть, 100 единиц пористости), и в этом случае она определяет значение HI·Pol для фильтрата бурового раствора на нефтяной основе. В свою очередь это значение можно распространить на другие два неизвестных идентифицированных углеводородных флюида. Одно релевантное соображение при осуществлении этой процедуры заключается в том, что при оценивании Δij(VJ)apparent (то есть объема фильтрата бурового раствора на нефтяной основе в этом примере) на основании последний может быть загрязнен остаточными свободными флюидами в результате выполнения бурения.
Хотя представляет интерес идентификация картин, возникающих в результате замещения x-составляющих, когда замещение происходит парами, имеется по меньшей мере один исключительный случай, позволяющий полагать, что, когда назначены индивидуальные сигнатуры каротажных измерений для составляющих, фактические скважинные каротажные измерения можно преобразовать в элементные объемные доли. Теперь будет пояснен контринтуитивный пример, в котором сигнатуры каротажных измерений для различных составляющих не калибруются индивидуально, а группа составляющих может одновременно полностью характеризоваться и назначаться одна новая определенная групповая сигнатура, и при этом замещение не будет происходить парами. Конкретный пример использован для описания, каким образом это будет работать относительно истинной пористости.
На фиг. с 14А по 15 показана эта ситуация, приводящая к определению характеристики пространства пористости (или гиперплоскости пористости в случае пространства с измерением n-1), которая представляет собой концепцию, определенную ниже. На фиг. 14А показаны различные конечные точки FldA, FldB, FldI, FldJ, FldZ флюида и единственная конечная точка Mtx эквивалентной основной массы породы (то есть единственная точка, представляющая минералогию породы подземного пласта) вместо различных индивидуальных конечных точек (например, MinA, MinZ) минерала. Кроме того, показана точка М измерений. Когда правила смешивания различных рассматриваемых скважинных каротажных измерений m1,…mα,…mn являются линейными (в смысле объемных параметров), точка М измерений соответствует центру силы тяжести упомянутого выше флюида и конечных точек основной массы породы, взвешенному по соответствующим объемным долям в процентах, присутствующим в объеме измеряемого пласта. На фиг. 14В показано то, что в этой заявке названо пространством пористости, которое охватывается конечными точками FldA, FldB, FldI, FldJ, FldZ флюида.
На фиг. 14С показана геометрическая визуализация измерения истинной пористости подземного пласта, вычисленная как 1 за вычетом отношения расстояния точки М измерений до пространства пористости к расстоянию конечной точки Mtx основной массы породы до пространства пористости. На фиг. 14D показано, что перемещения или смещения конечных точек FldA, FldB, FldI, FldJ, FldZ флюида относительно пространства пористости никоим образом не влияют на вычисленную истинную пористость. Следовательно, в целом истинная пористость зависит от положения и ориентации пространства пористости, но не от конкретного положения индивидуальных конечных точек флюида в этом пространстве пористости. В случае работы с измерениями ядерного магнитного резонанса можно применять те самые концепции и способы. Однако следует заметить, что на практике пространство пористости должно быть охвачено соответствующими сигнатурами ядерного магнитного резонанса для несмачивающих флюидов и эффективными сигнатурами ядерного магнитного резонанса для смачивающих флюидов, которые были введены и существование которых было показано ранее в этом описании.
На фиг. 14Е показано, что гиперплоскость может быть вполне определена, например, вектором, ортогональным к ней, и точкой, принадлежащей ей (точкой FldZ на этой фигуре). Хотя это определение является очень удобным, ясно, что оно не является однозначным. Строго говоря, n параметров можно использовать для определения гиперплоскости с размерностью n-1 внутри n измерений. В общем случае, когда n флюидных составляющих присутствуют внутри пористости, основную массу породы представляют единственной эквивалентной точкой основной массы породы и рассматривают n измерений, вычисление пористости может включать в себя n известных параметров в противоположность n2 параметрам, которые используют, чтобы охарактеризовать индивидуально n конечных точек флюидных составляющих.
На фиг. 14F показано, каким образом на практике можно характеризовать гиперплоскость пористости. Когда поровое пространство в пробе измеряемого пласта занято различными флюидами, которые могут замещать друг друга, а измерения повторяют, то точка М измерений будет перемещаться относительно гиперплоскости параллельно гиперплоскости пористости. Замером или объединением векторов смещения таких точек измерений однозначно определяется ориентация гиперплоскости пористости (то есть однозначно определяется направление вектора, ортогонального к такой гиперплоскости пористости). Кроме того, перестановка флюидных составляющих не происходит парами, а, возможно, триплетами и т.д.
Более конкретно, математическое выражение для расстояния любой точки М измерений до гиперплоскости пористости представляет собой просто линейную сумму вида:
d(M)=p0+p1·m1+…+pα·mα+…+pn·mn,
где p0, p1,…pα,…pn представляют собой постоянные параметры, описывающие ориентацию и положение гиперплоскости пористости в пространстве (при (p1)2+…(pα)2+…(pn)2=1).
Соответствующие параметры p0, p1,…pα,…pn можно определять при использовании различных способов. В одном таком способе используют пористость из данных кернового анализа в качестве эталонной и выражают истинную пористость как линейное сочетание имеющихся измерений с добавлением постоянной. После этого два набора данных могут быть приведены в соответствие.
Применительно к настоящему примеру можно выполнять каротаж в процессе бурения всего интервала буровой скважины (моментальный снимок во время прохода при бурении). Каротаж того же самого интервала можно повторять после бурения (моментальный снимок во время прохода при очистке или во время прохода при расширении ствола скважины), при этом в предположении обычного бурения на репрессии различные флюиды могут занимать одно и то же поровое пространство в различные моменты времени. Можно исследовать конкретные параметры p0, p1,…pα,…pn, которыми минимизируется разность между d(Mбурения) и d(Mочистки) на протяжении всего интервала каротажа при ограничивающем условии d(M(FldZ))=0. Эту операцию используют для однозначного определения ориентации и положения в пространстве гиперплоскости пористости.
Выражение можно получать, когда рассматриваемые измерения m1,…mα,…mn прежде всего преобразуют в соответствующие измерения Phi1 (a),…Phiα (a),…Phin (a) кажущейся пористости. Процесс преобразования измерений в кажущиеся пористости основан на предполагаемом априори составе основной массы породы и предполагаемом априори составе флюида, занимающего поровое пространство породы. Ради доказательства можно предположить, что основная масса породы представляет собой известняк, и предположить, что флюид представляет собой воду с конкретной соленостью. На практике это означает, что, когда основная масса породы оказывается фактически известняком, а флюид оказывается фактически водой, то измерения Phi1 (a),…Phiα (a),…Phin (a) кажущейся пористости будут равны друг другу и равны истинной пористости пласта.
На практике нижеследующие соображения могут учитываться при выборе предполагаемых априори видов основной массы породы и флюида для преобразования измерений в кажущиеся пористости. Предполагаемый флюид, используемый в кажущихся пористостях, должен быть одним из присутствующих флюидов. Если присутствует свободная вода в виде пластовой воды или фильтрата бурового раствора на водной основе, то эту воду можно использовать для получения кажущихся пористостей. Для кажущейся основной массы породы можно использовать преобладающую литологию, которая будет встречаться.
На фиг. 14G показано, каким образом предшествующие фиг. (14A-14F) можно модифицировать при работе с измерениями кажущейся пористости, а не с собственно измерениями. По существу, теперь конечная точка известняка расположена в начале координат, а конечная точка воды имеет координаты (1, 1,…,1). Это очень удобно, поскольку может быть введена новая кажущаяся пористость PHI(a) P1,…Pα,…Pn, определяемая как линейная смесь традиционных кажущихся пористостей:
PHI(a) P1,…Pα,…Pn=P0·Phi1 (a)+…+Pα·Phiα (a)+…Pn·Phin (a).
Кроме того, изложенную выше процедуру минимизации разности между d(Mбурения) и d(Mочистки) можно заменить поиском конкретных параметров P1,…Pα,…Pn, которыми минимизируется разность между кажущимися пористостями (PHI(a) P1,…Pα,…Pn)(бурения) и (PHI(a) P1,…Pα,…Pn)очистки на всем протяжении интервала каротажа при ограничивающем условии PHI(a) P1,…Pα,…Pn (воды)=P0+…+Pα+…+Pn=1.
На фиг. 15 в качестве реального примера такой минимизации показан график 150, при этом присутствующими флюидами были вода, нефть и газ, а рассматривавшимися измерениями были объемная плотность, пористость по данным нейтронного каротажа и поперечное сечение захвата тепловых нейтронов. На фигуре показаны кажущиеся пористости (PHI(a) P1,…Pα,…Pn)(бурения) и (PHI(a) P1,…Pα,…Pn)очистки по вертикальной оси в зависимости от глубины по горизонтальной оси после процесса оптимизации, описанного выше. Как видно, происходит реальное наложение кажущихся пористостей, вычисленных по измерениям во время прохода при бурении (кривая 151) и прохода при очистке (кривая 152).
Для получения результирующей кажущейся пористости PHI(a) P1,…Pα,…Pn не требуется, чтобы параметры нефти и газа были известными (которые к тому же очень трудно моделировать на практике), и ее можно без труда распространить на соседние опорные скважины без обязательного требования выполнения нового прохода при очистке всякий раз при регистрации (то есть после того как параметры P1,…Pα,…Pn определены для набора флюидов на всем протяжении длины скважины, повторное определение их на соседней опорной скважине можно исключить, когда также ожидается, что будут встречаться флюиды тех же видов).
Хотя теперь кривые по результатам выполнения прохода при бурении и прохода при очистке накладываются, может оставаться некоторый остаточный статистический шум. Поэтому можно взять среднее пористостей во время прохода при бурении и прохода при очистке в качестве конечной кажущейся пористости, а статистическую погрешность между пористостями во время прохода при бурении и прохода при очистке можно использовать для оценивания точности такой вычисляемой конечной истинной пористости.
Использование изложенной выше процедуры для минимизации различий между кажущимися пористостями из различных моментальных снимков, несмотря на происходящие замещения x-составляющих, приводит к получению конечной кажущейся пористости (то есть результирующих идентичных кажущихся пористостей во время прохода при бурении и прохода при очистке), что дает новое преимущество, заключающееся в отсутствии зависимости от фактического состава флюида, присутствующего в поровом пространстве, и зависимости от минералогии породы. В таком случае кажущаяся пористость PHI(a) P1,…Pα,…Pn может быть преобразована в истинную пористость при выполнении окончательной вычислительной операции, приведенной ниже (согласно фиг. 14С пористость вычисляют как 1 за вычетом отношения расстояния точки М измерений до гиперплоскости пористости к расстоянию конечной точки Mtx основной массы породы до гиперплоскости пористости):
 .
.
Заметим, что хотя рассмотрение в этой заявке относится к флюидам, занимающим поровое пространство, способ, описанный в этой заявке, также пригоден для случая, в котором минеральная соль частично закупоривает поровое пространство и затем переходит в раствор, когда фильтрат бурового раствора на водной основе проникает в пласт. В этом случае, хотя флюид отсутствует, соль рассматривают наряду с составляющими, включенными в гиперплоскость пористости. Требованиям определения истинной пористости особенно удовлетворяет прибор, продаваемый под товарным знаком EcoScope™ (который является товарным знаком Schlumberger Technology Corporation), поскольку различные измерения, получаемые от такого прибора, являются консонантными, а прибор обеспечивает до четырех различных измерений кажущейся пористости, которые могут быть смешаны для нахождения истинной пористости относительно четырех различных флюидов, занимающих поровое пространство. На практике эти четыре пористости не используют одновременно, а число используемых измерений соответствует максимальному числу различных флюидов, занимающих поровое пространство пласта.
Автоматический способ должен начинаться, например, при наличии кажущейся пористости по данным нейтронного каротажа для выбора числа используемых измерений и для определения, согласуются ли измерения во время выполнения прохода при бурении и прохода при очистке. Если не согласуются, то в дополнение рассматривается пористость по данным плотностного каротажа и определяется, могут ли быть смешаны предшествующие измерения, чтобы сделать согласованными измерения во время выполнения прохода при бурении и прохода при очистке. Если это все же не работает, то дополнительно рассматривается кажущаяся пористость по данным измерения поперечного сечения захвата тепловых нейтронов и определяется, могут ли быть смешаны такие измерения трех видов, чтобы сделать согласованными измерения во время выполнения прохода при бурении и прохода при очистке. Изложенный выше процесс может быть продолжен с использованием параметров других дополнительных измерений. Дополнительным способом может быть нейтронная спектроскопия (например, спектроскопия захвата тепловых нейтронов) или каротаж по буровому раствору, которыми дается информация об основной массе породы, позволяющая вычислять PHI(a) P1,…Pα,…Pn(Mtx).
И в этом случае, когда минеральная соль и т.д. частично закупоривает поровое пространство и затем переходит в раствор, при этом фильтрат бурового раствора на водной основе проникает в пласт, получающийся профиль проникновения становится необычным, двухинтервальным (то есть, включающим в себя две поверхности раздела или границы) осесимметричным профилем проникновения относительно буровой скважины, при этом объем пласта, расположенный между стволом скважины и первой поверхностью раздела, наиболее близкой к буровой скважине, включает в себя свободную от соли зону и неповрежденный фильтрат бурового раствора на водной основе, следующий, находящийся глубже объем пласта, расположенный между двумя поверхностями раздела, включает в себя неповрежденную соль, закупоривающую поровое пространство, и насыщенный солью фильтрат бурового раствора на водной основе, а остающийся внешний объем пласта, расположенный после второй, самой глубокой поверхности раздела, включает в себя ненарушенный пласт, который может быть рассмотрен и определен при использовании специфичного набора консонантных измерений с такого прибора, как прибор EcoScopeТМ, в том числе при выполнении регистрации данных периодических наблюдений (то есть данных, регистрируемых по результатам выполнения прохода при бурении и прохода при очистке).
Ниже рассмотрено применение способов анализа сигнатур каротажных измерений для автономных данных ядерного магнитного резонанса с использованием регистрации данных периодических наблюдений или регистрации данных с многочисленных глубин исследования (или любого сочетания их). Будет описана успешная реализация способов и процедур, описанных выше, и дополнительных связанных операций в конкретном случае скважинных каротажных измерений ядерного магнитного резонанса. Кроме того, представлена последовательность действий при абсолютно не связанной ограничением линейной интерпретации (инверсии) объемных параметров флюидов с использованием основанного на ковариации способа перераспределения объемов.
Конечный ответ, получающийся в результате успешной реализации способов и процедур, описанных выше, можно выразить в виде:
Данные элементного спектроскопического каротажа (для минералогии) плюс данные каротажа ядерного магнитного резонанса (для объемных параметров флюида) обеспечивают полные окончательные объемные параметры пласта.
Согласно изложенному выше: (а) разработан вариант каротажа без источников (то есть вариант скважинного каротажа, который не включает в себя химических радиоактивных источников, развертываемых внутри скважины); (b) используются два набора измерений (спектроскопии нейтронов и ядерного магнитного резонанса); (с) обеспечивается возможность определения объемных параметров трехфазных флюидов пласта (газа, нефти и воды); (d) и обеспечивается по существу невосприимчивость в значительном диапазоне к эффектам солености воды (например, к изменяющейся солености воды или деминерализованной воды).
Непосредственное применение способов, описанных применительно к каротажным измерениям ядерного магнитного резонанса, вытекает из следующего. В общем случае каротажные измерения ядерного магнитного резонанса содержат многочисленные компоненты, которые можно интерпретировать, чтобы составлять множество индивидуальных и истинных консонантных отдельных измерений. Кроме того, каротажные измерения ядерного магнитного резонанса с градиентных приборов (в которых чувствительный объем измерений имеет градиент магнитного поля), в частности, с зонда, имеющего относительно небольшой сосредоточенный, вполне определенный геометрический объем, который можно располагать на расстоянии нескольких дюймов от стенки буровой скважины (например, 2,75 дюйма (7 см) при диаметре ствола скважины 8,5 дюйма (21,6 см) в случае прибора proVISION™). Поэтому измерение нечувствительно к проникновению на первые несколько дюймов. В связи с этим каротажные измерения во время бурения, когда они сочетаются с измерениями механической скорости проходки при быстром бурении, и/или когда прибор каротажа во время бурения представляет собой самый нижний прибор в компоновке низа бурильной колонны, можно считать замером незаполненной нетронутой зоны (ненарушенной зоны) с обеспечением заданного контраста, тогда как на измерение во время выполнения прохода при очистке может значительно влиять проникновение.
Сигнатуры ядерного магнитного резонанса для флюидов могут быть относительно простыми для идентификации с точностью до нормировочного множителя, поскольку сигнатуры различных флюидов находятся в различных и вполне определенных областях рассматриваемых спектров распределения ядерного магнитного резонанса. Правила смешивания измерений ядерного магнитного резонанса можно принять линейными, что может не относиться к случаю других каротажных измерений, таких как удельное сопротивление, пористость по данным нейтронного каротажа, или акустических каротажных измерений. Данные ядерного магнитного резонанса можно отображать различными способами, например, в виде распределений, последовательностей эхо-сигналов или любого линейного преобразования их, чтобы моделировать одномерные или многомерные бины или оконные суммы эхо-сигналов.
Описанный пример соответствует обломочной среде (то есть сланцево-песчаниковым пластам) с пластовым газом и деминерализованной водой (четыре части соли на тысячу частей), присутствующими в поровых пространствах, и пробуренной на репрессии при использовании бурового раствора на нефтяной основе. Присутствующие составляющие пласта могут включать в себя глинистый минерал (минералы), смачивающую воду, связанную глиной, алевролит (кварцевый минерал), смачивающую воду, капиллярно связанную в порах алевролита, песчаник (кварцевый минерал), несмачивающий флюид, пластовый газ в порах песчаника в ненарушенной нетронутой зоне, смачивающую природную воду в порах песчаника в ненарушенной нетронутой зоне, несмачивающий остаточный газ в промытой зоне (также называемой зоной проникновения фильтрата, поврежденной проникновением фильтрата бурового раствора), смачивающую остаточную пленку связанной воды, покрывающую зерна песчаника в промытой зоне, и фильтрат бурового раствора на нефтяной основе.
В дальнейшем будем исходить из предположения наличия естественного пластового газообразного углеводорода и флюидов на водной основе, хотя на предшествующих фигурах и в способах классификации показывались следы флюида дополнительного вида, такого как жидкий углеводород. Хотя естественная пластовая вода в порах песчаника трактовалась как единственная и назначалась одна доминирующая сигнатура, для большей детальности можно вводить многочисленные сигнатуры воды, соответствующие различным размерам пор.
На фиг. 23 приведен один вариант осуществления последовательности действий при интерпретации ядерного магнитного резонанса. Действия в последовательности представлены на левой стороне диаграммы последовательности действий, а соответствующие фигуры для этих действий указаны справа.
На фиг. 24 и 25 показано интегрирование распределений Т2 по глубине (фиг. 24), за которым следует интегрирование по функции распределения Т2 (фиг. 25). Данные по результатам выполнения прохода при бурении представлены графиками 240, 250, а данные по результатам выполнения прохода при очистке представлены графиками 241, 251 соответственно на фиг. 24 и 25. Положение точки, в которой кривые для прохода при бурении и прохода при очистке отходят друг от друга на фиг. 24, соответствует граничному значению Т2 соответствующего связанного флюида, предназначенному для использования (в этом случае 33 мс). Интервалы относительно распределений Т2 ниже этого граничного значения можно интерпретировать, например, как включающие в себя глинистый минерал (минералы), алевролит (кварцевый минерал), связанную глиной воду и капиллярно связанную воду и порах алевролита.
На фиг. с 26А по 26F показаны распределения Т2 для прохода при бурении и прохода при очистке, выбранные из представляющих интерес зон, при этом извлечение мод было ограничено межзонным извлечением. На фиг. с 27А по 27Н и 28А, 28В показаны результаты подбора кривых из зон и проходы отображены совместно, включая нижележащие извлеченные гауссовы моды. Для нелинейного подбора методом нелинейных квадратов использованы такие же гауссовы моды между различными зонами (при одном и том же проходе при измерении), такой же гауссов центр, но, возможно, с другой шириной между различными проходами при измерении (в той же самой зоне), и такая же (или коррелированная) гауссова площадь между различными проходами (в той же самой зоне), когда гауссовы моды относятся к связанным флюидам.
На фиг. 29 и 30 представлены связанные кажущиеся сигнатуры ядерного магнитного резонанса для различных флюидных составляющих, нормированные относительно единицы (то есть, относительно 100 единиц пористости). Эти отклики были представлены в формате распределения Т2 или формате амплитуд спиновых эхо, но они могут быть представлены в других возможных форматах, зависящих от вышеупомянутых двух, посредством линейного преобразования, в таких как одно- или многомерные бины пористости или оконные суммы эхо-сигналов. На фиг. 29 показаны в формате Т2 сигнатуры ядерного магнитного резонанса для различных флюидных составляющих (полученные из фиг. с 27А по 27Н и 28А, 28В). Обращает внимание, каким образом изменения сигнатур флюидов между различными моментальными снимками (то есть, между проходом при бурении и проходом при очистке) учитываются путем назначения сигнатуры во время связанного прохода при бурении и прохода при очистке (включающей в себя в этом случае 80 объединенных компонентов из 40 компонентов при бурении с добавлением 40 компонентов распределения Т2 ядерного магнитного резонанса при очистке). Отображенные сигнатуры нормированы относительно единицы (то есть, 100 единиц пористости). На фиг. 29 и 30 линии или точки 290-297 графиков последовательно соответствуют связанной глиной воде; капиллярно связанной воде в порах алеврита; свободной воде, присутствовавшей в порах песчаника, вытесненной между проходом при бурении и проходом при очистке; остаточной воде, присутствовавшей в порах песчаников во время прохода при очистке; пластовому газу, вытесненному фильтратом бурового раствора на нефтяной основе между проходом при бурении и проходом при очистке; остаточному пластовому газу, присутствовавшему в порах песчаника во время прохода при очистке; фильтрату бурового раствора на нефтяной основе, присутствовавшему в порах песчаника во время прохода при бурении; и дополнительному фильтрату бурового раствора на нефтяной основе, который проник в поры песчаника между проходом при бурении и проходом при очистке.
На фиг. 30 показаны различные кажущиеся сигнатуры ядерного магнитного резонанса для различных флюидных составляющих, преобразованные из формата Т2, указанного выше, в формат амплитуд спиновых эхо и отражающих упомянутую выше последовательность Карра-Парселла-Мейбума-Гилла ядерного магнитного резонанса, используемую во время операции регистрации данных. Поскольку тепловой шум, присутствующий в исходных амплитудах спиновых эхо, можно считать некоррелированным, соответствующая ковариационная матрица является диагональной, что делает последовательности эхо-сигналов более подходящими для последующей операции элементной интерпретации (инверсии) объемных параметров флюидов. С другой стороны, распределения Т2 являются результатом некорректной линейной инверсии, требующей выполнения способов регуляризации, которые влияют на результирующую ковариационную матрицу соответствующих компонентов Т2. Работа с распределениями Т2 при идентификации и классификации различных присутствующих флюидных составляющих является достаточно обычной, однако последовательности эхо-сигналов лучше подходят для операции элементного анализа объемных параметров флюидов.
На фиг. 31А показан элементный анализ объемных параметров флюидов, предназначенный для нахождения кажущихся объемов (то есть, не скорректированных за влияние водородного индекса и поляризационного фактора). Расположенными снизу вверх показаны связанная глиной вода (кривая 310), капиллярно связанная вода в порах песчаника (кривая 311), вода в порах песчаника во время прохода при бурении (кривая 312), фильтрат бурового раствора на нефтяной основе, уже присутствовавший во время прохода при бурении (кривая 313), подвижный газ, присутствовавший во время прохода при бурении (кривая 314), и остаточный газ, наблюдавшийся во время выполнения прохода при очистке (кривая 315). Была выполнена простая линейная инверсия, которая по своей природе быстро интерактивно и легко реализуется. Кроме того, различные характеристики измерения входного шума и взаимная корреляция (или отсутствие ее) учитываются в явном виде путем включения соответствующей ковариационной матрицы в инверсию. Однако, поскольку при традиционных измерениях объемных параметров пласта объемы составляющих пласта ограничиваются до 0≤V≤1, вместо прямого линейного решения, такого, как представленное в этой заявке, возможно получение отрицательных значений. Это может быть результатом шума во входных данных, существования неточностей в полученных сигнатурах ядерного магнитного резонанса для флюидов или небольших рассогласований по глубине между различными моментальными снимками. Эти отрицательные значения переносятся в упорядочение обратных кривых, что можно наблюдать в виде небольших изменений на представленной фигуре (например, кривая 314 иногда проходит ниже кривой 315 или кривая 312 иногда проходит ниже кривой 311). Способ, предложенный для устранения этих отрицательных значений, заключается в перераспределении их среди других присутствующих составляющих пласта в соответствии с взаимной корреляцией, существующей между обращенными объемами составляющих пласта. Это оперативно достигается распространением ковариационной матрицы из входных измерений ядерного магнитного резонанса в выходные кажущиеся объемы, показанные на фиг. 32. Перераспределение объемов также представляет собой линейный процесс и не влияет на скорость предложенного способа, интерактивность или легкость реализации.
На фиг. 31В показан элементный анализ объемных параметров флюидов, предназначенный для нахождения скорректированных кажущихся объемов после перераспределения отрицательных значений при использовании ковариационной матрицы из фиг. 32. Отметим отсутствие упорядочения обратных кривых в этом случае. На фиг. 32 представлено визуальное отображение ковариационной матрицы исходных кажущихся объемов (до коррекции), на котором линиями 320-326 представлены соответственно следующие составляющие: связанная глиной вода; капиллярно связанная вода в порах алеврита; вода, присутствовавшая в порах песчаников; фильтрат бурового раствора на нефтяной основе, присутствовавший в порах песчаника во время прохода при бурении; пластовый газ, вытесненный фильтратом бурового раствора на нефтяной основе между проходом при бурении и проходом при очистке; фильтрат бурового раствора на нефтяной основе, присутствовавший в порах песчаника во время прохода при очистке; и остаточный пластовый газ, присутствовавший в порах песчаника во время прохода при очистке.
На фиг. 33 показан конечный элементный анализ объемных параметров флюидов, предназначенный для нахождения истинных объемов флюидов после коррекции скорректированных кажущихся объемов флюидов за соответствующие объединенные влияния водородного индекса и поляризационного фактора. Снизу вверх расположены связанная глиной вода (штриховка 330), капиллярно связанная вода в порах алеврита (штриховка 331), вода в порах песчаника во время прохода при бурении (штриховка 332), фильтрат бурового раствора на нефтяной основе, присутствовавший во время прохода при бурении (штриховка 333), подвижный газ, присутствовавший во время прохода при бурении (штриховка 334), и остаточный газ, наблюдавшийся во время прохода при очистке (штриховка 335). Шкала пористости имеет значения 0-30% (или единиц пористости). На фиг. 34 представлена успешная реализация петрофизического уравнения (или положения): каротажные диаграммы элементной спектроскопии (для минералогии) (дорожка 340) плюс каротажные диаграммы ядерного магнитного резонанса (для элементного измерения объемных параметров флюидов) (дорожка 341) дают все необходимое для полной оценки объемных параметров пласта (дорожка 342).
На фиг. 35 показан пример вычислительной системы 200. Вычислительная система 200 может быть индивидуальной компьютерной системой 201А или компоновкой распределенных компьютерных систем. Компьютерная система 201А может включать в себя один или несколько модулей 202 анализа, которые сконфигурированы для выполнения различных задач в соответствии с некоторыми вариантами осуществления, таких как задачи, показанные на фиг. 23. Эти различные задачи модули 202 анализа могут выполнять независимо или во взаимосвязи с одним или несколькими процессорами 204, которые могут быть соединены с одним или несколькими носителями 206 данных. Кроме того, процессор (процессоры) 104 может быть соединен с сетевым интерфейсом 208 для обеспечения связи компьютерной системы 201А по сети 209 передачи данных с одной или несколькими дополнительными вычислительными системами и/или компьютерными системами, такими как 201В, 201С и/или 201D (заметим, что в компьютерных системах 201В, 201С и/или 201D может совместно использоваться или не использоваться такая же архитектура, как в компьютерной системе 201А, и они могут располагаться на различных физических местах, например, компьютерные системы 201А и 201В могут находиться на судне, идущем в океане, в офисном здании на суше или на месте расположения скважины и поддерживать связь с одной или несколькими компьютерными системами, такими как 101С и/или 101D, которые расположены в одном или нескольких центрах данных на берегу, на других судах и/или расположены в различных странах на разных континентах.
Процессор может включать в себя микропроцессор, микроконтроллер, процессорный модуль или процессорную подсистему, программируемую интегральную схему, программируемую вентильную матрицу или другое управляющее или вычислительное устройство.
Носители 206 данных могут быть реализованы в виде одного или нескольких считываемых компьютером или машиночитаемых носителей данных. Заметим, что хотя в примере варианта осуществления из фиг. 35 носители 206 данных показаны в компьютерной системе 201А, в некоторых вариантах осуществления носители 206 данных могут быть распределены в пределах и/или по многочисленным внутренним и/или внешним корпусам вычислительной системы 201А и/или дополнительных вычислительных систем. Носители 206 данных могут включать в себя запоминающие устройства одного или нескольких различных видов, в том числе полупроводниковые запоминающие устройства, такие как динамические или статические запоминающие устройства с произвольной выборкой (DRAM или SRAM), стираемые программируемые постоянные запоминающие устройства (EPROM), электрически стираемые и программируемые постоянные запоминающие устройства (EEPROM) и флэш-память; магнитные диски, такие как несъемные диски, дискета и съемные диски; другие магнитные носители, включая ленту; оптические носители, такие как компакт-диски (CD) или цифровые универсальные диски (DVD); или устройства хранения данных других видов. Заметим, что инструкции, рассмотренные выше, могут содержаться на одном считываемом компьютером или машиночитаемом носителе данных или могут содержаться на многочисленных считываемых компьютером или машиночитаемых носителях данных, распределенных в крупной системе, по возможности имеющей многочисленные узлы. Такой считываемый компьютером или машиночитаемый носитель (или носители) данных считается частью изделия (или изделия производства). Изделием или изделием производства можно называть любой изготовленный единственный компонент или многочисленные компоненты. Носитель (или носители) данных может быть расположен в машине, выполняющей машиночитаемые инструкции, или расположен на удаленном месте, с которого машиночитаемые инструкции могут загружаться по сети для исполнения.
Следует понимать, что вычислительная система 200 является примером вычислительной системы и что вычислительная система 200 может иметь больше или меньше компонентов, по сравнению с показанными, может объединять в себе дополнительные компоненты, не показанные в примере варианта осуществления из фиг. 35, и/или вычислительная система 200 может иметь другую конфигурацию или компоновку компонентов, показанных на фиг. 35. Различные компоненты, показанные на фиг. 35, могут быть реализованы аппаратным обеспечением, программным обеспечением или сочетанием аппаратного обеспечения и программного обеспечения, в том числе одной или несколькими интегральными схемами обработки сигналов и/или интегральными схемами прикладной ориентации.
Кроме того, действия в способах обработки, описанных выше, могут быть реализованы путем выполнения одного или нескольких функциональных модулей в устройстве обработки информации, таком как процессоры общего назначения или специализированные интегральные схемы, такие как интегральные схемы прикладной ориентации, вентильные матрицы, программируемые пользователем, программируемые логические устройства или другие подходящие устройства. Эти модули, сочетания этих модулей и/или сочетание их с аппаратным обеспечением общего назначения включены в объем защиты изобретения.
Пример способа скважинного каротажа, который может быть выполнен процессором 34 из фиг. 1, теперь будет описан с обращением к блок-схеме 360 последовательности действий из фиг. 36. Начиная с блока 360 способ включает в себя, например, сбор (блок 362) моментальных снимков ядерного магнитного резонанса (например, данных ядерного магнитного резонанса при периодических наблюдениях или с многочисленных глубин исследования), показывающих изменения в геологическом пласте, что описано выше. Способ также включает в себя, например, идентификацию (блок 363) множества флюидов в геологическом пласте на основании данных ядерного магнитного резонанса и определение (блок 364) соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, что также описано выше. В дополнение к этому кажущиеся скорректированные объемы могут быть определены (блок 365) для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и истинные объемы могут быть определены (блок 366) для идентифицированных флюидов на основании кажущихся объемов, что также описано выше. Способ заканчивают согласно блоку 367.
Многочисленные модификации и другие варианты осуществления могут прийти на ум специалисту в соответствующей области техники, имеющему выгоду от идей, представленных в изложенном выше описании и связанных с ним чертежах. Поэтому понятно, что различные модификации и варианты осуществления предполагаются включенными в объем прилагаемой формулы изобретения.
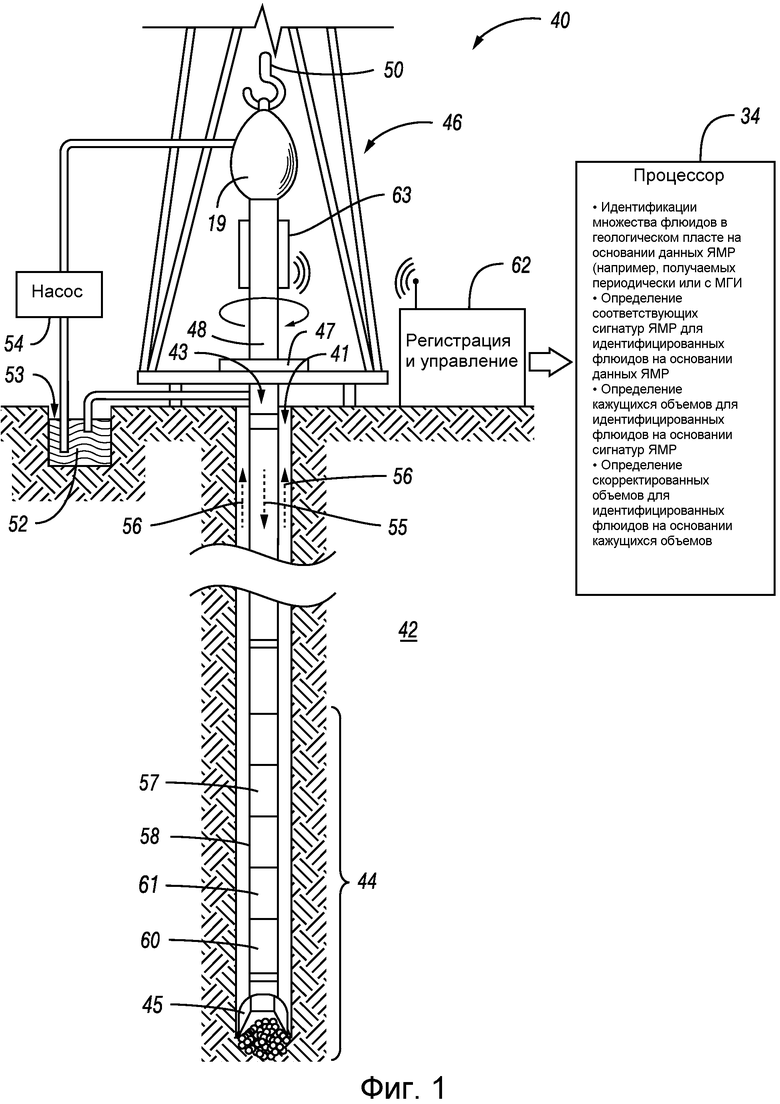








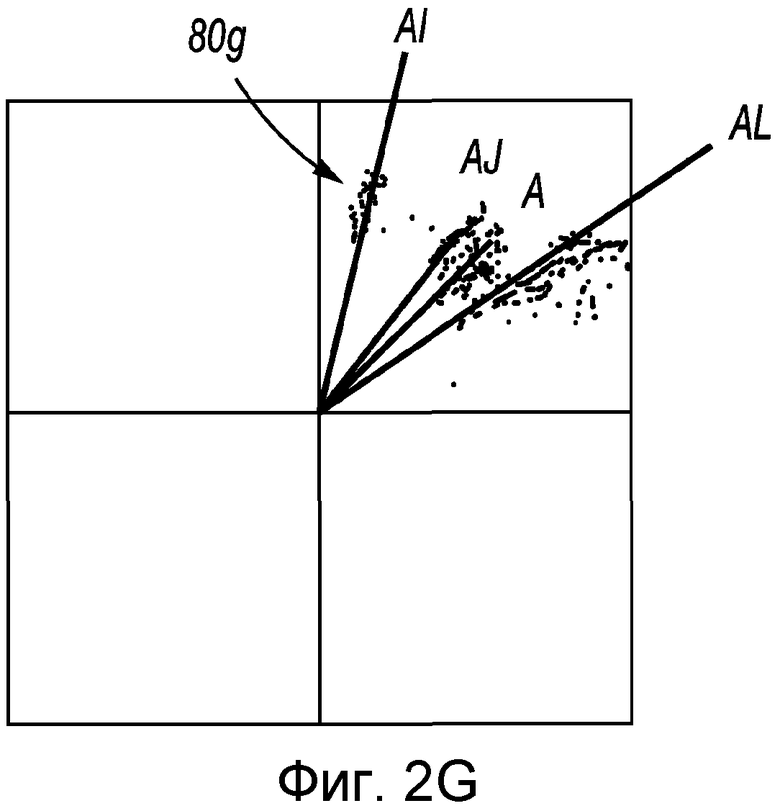
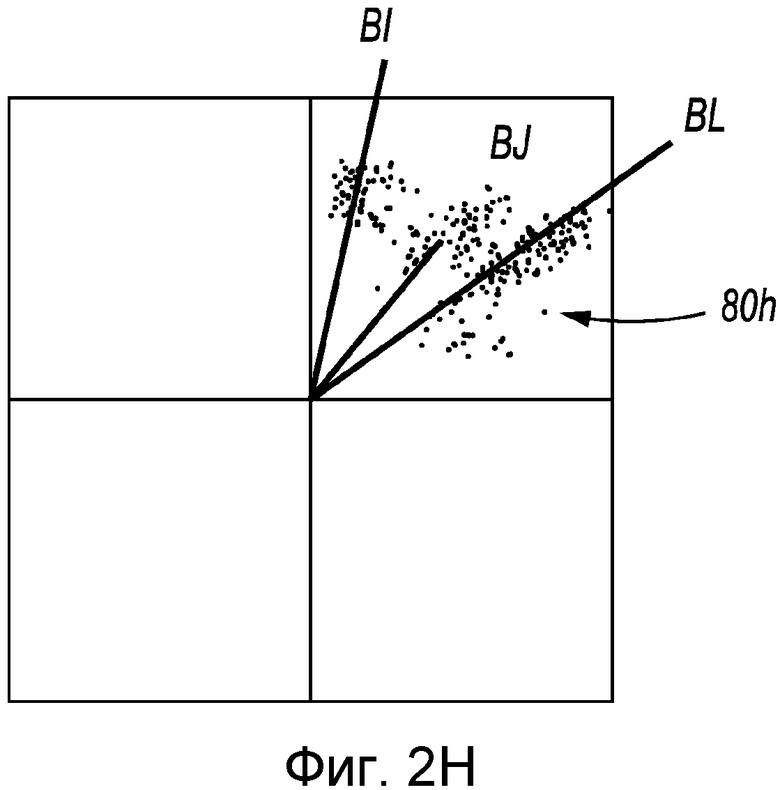
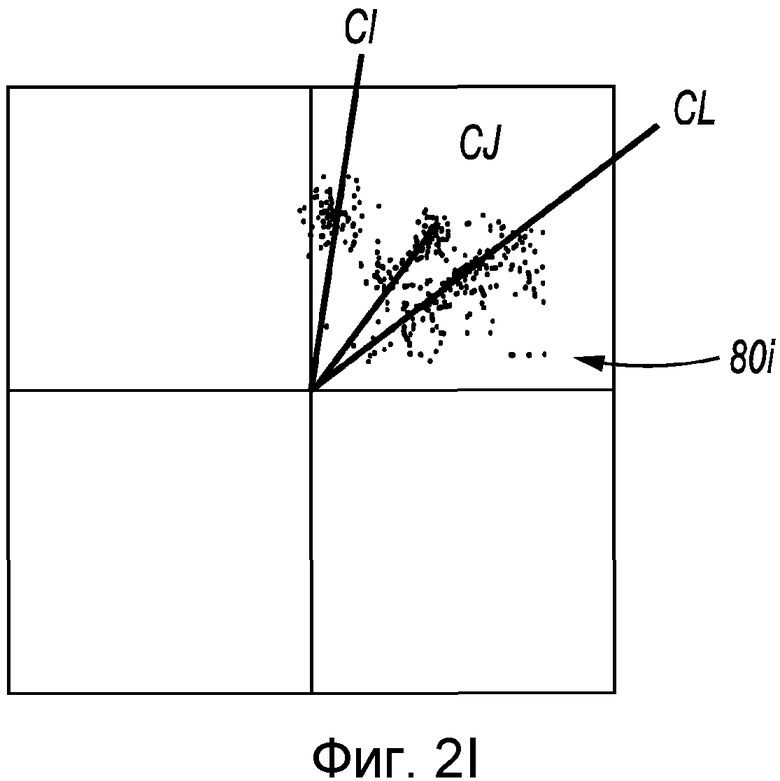




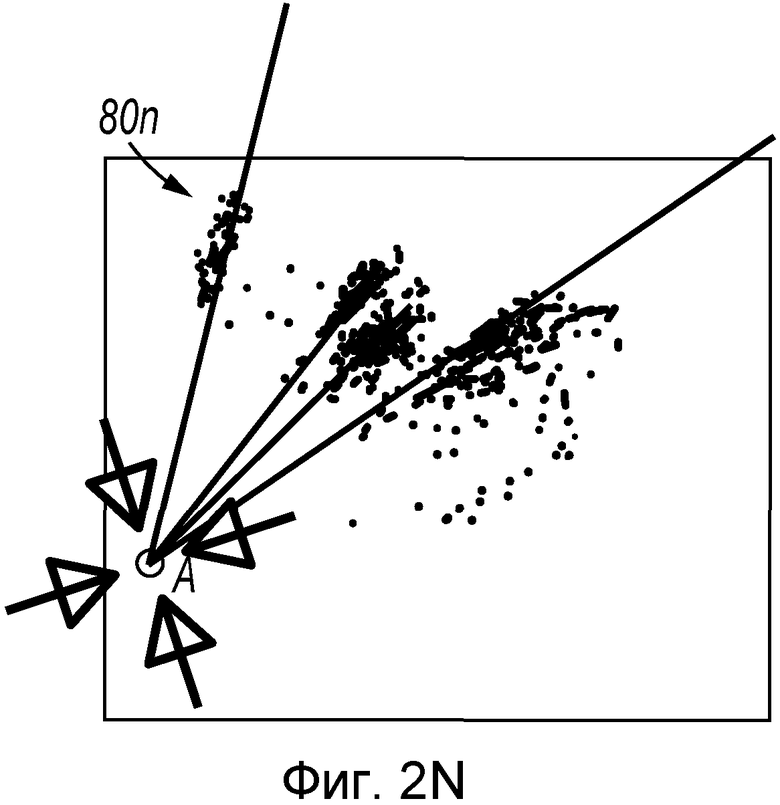

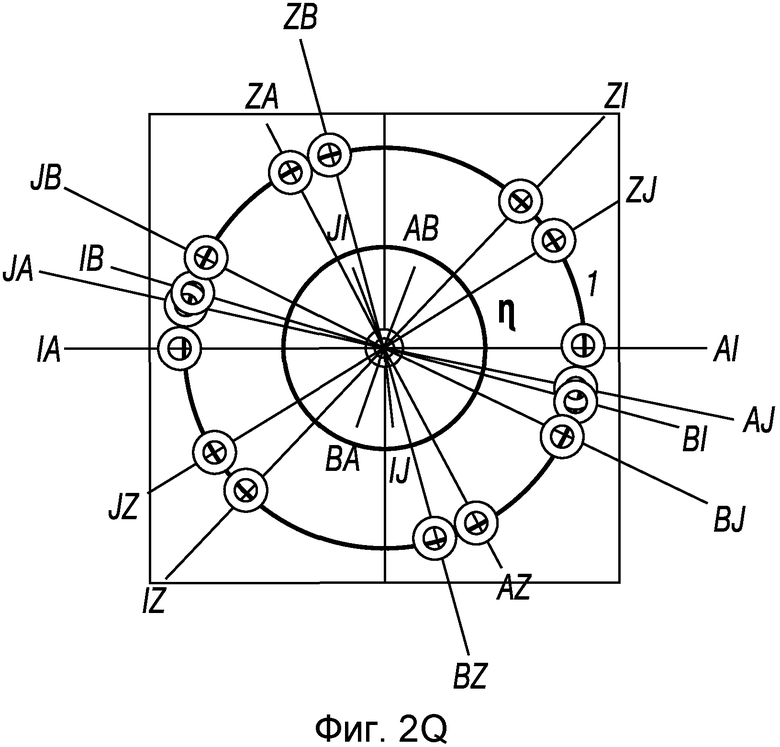

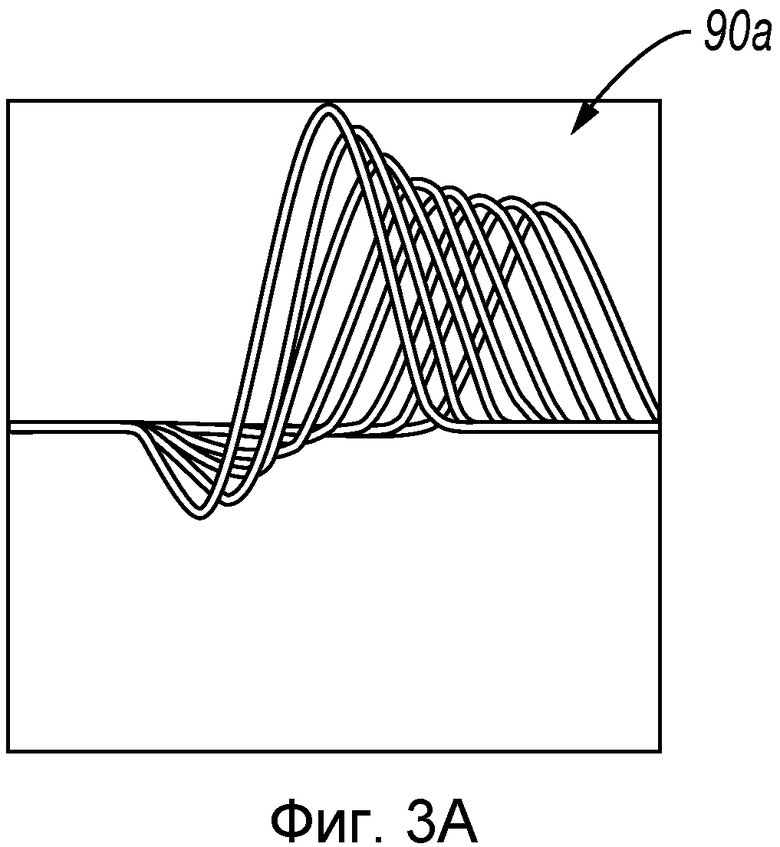

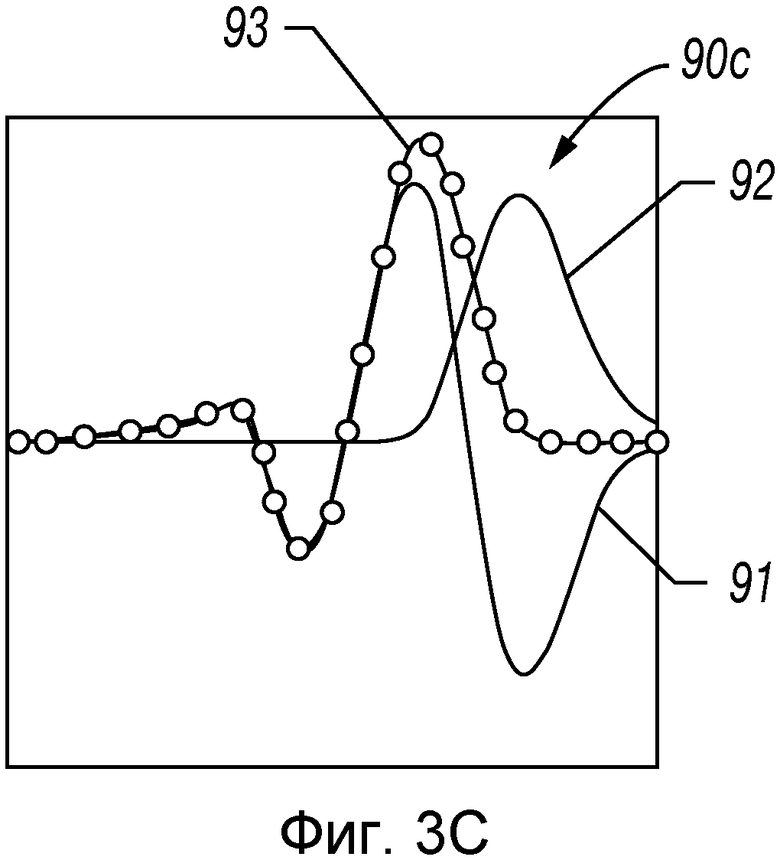


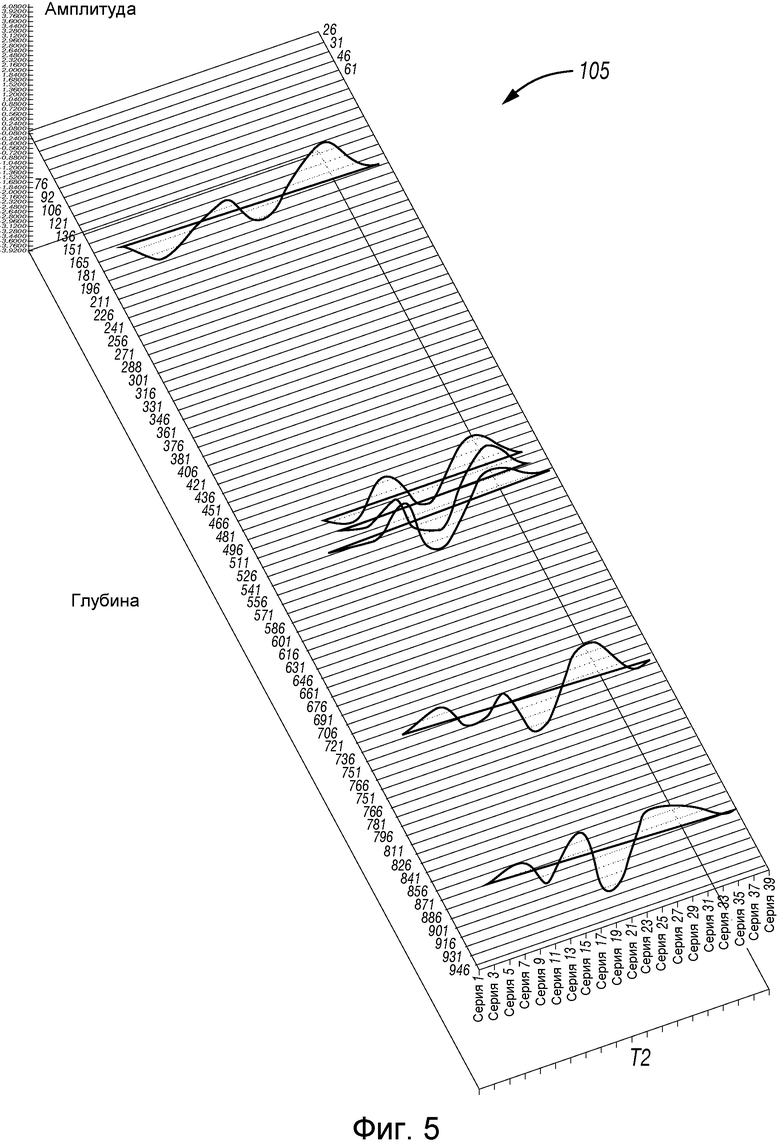

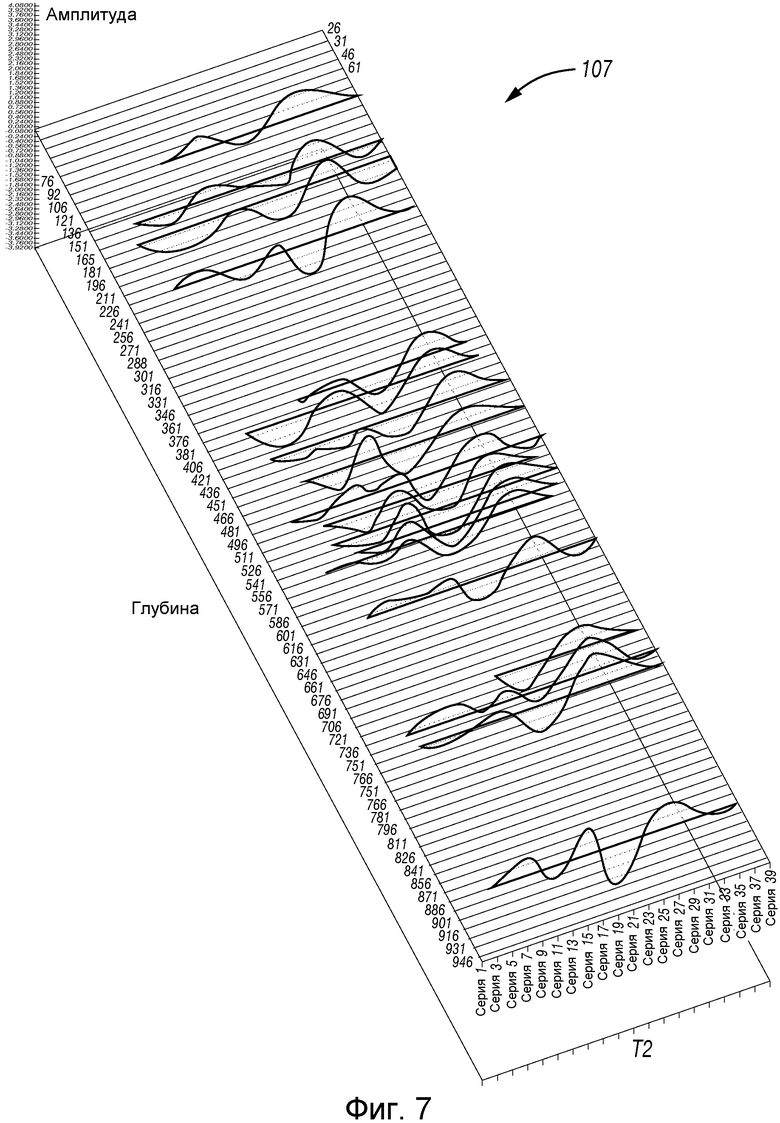



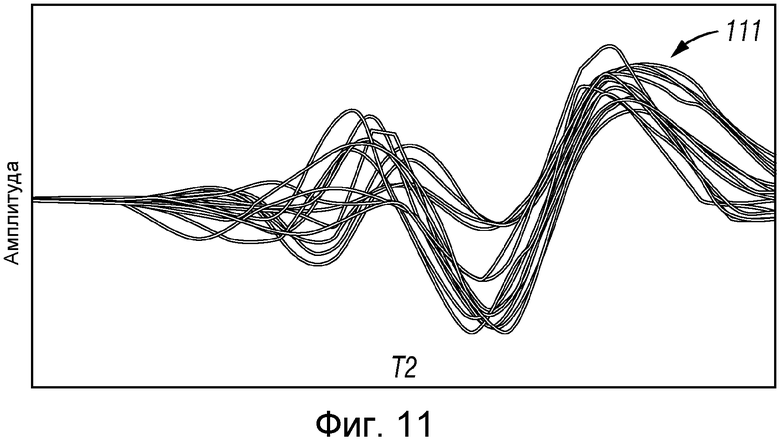
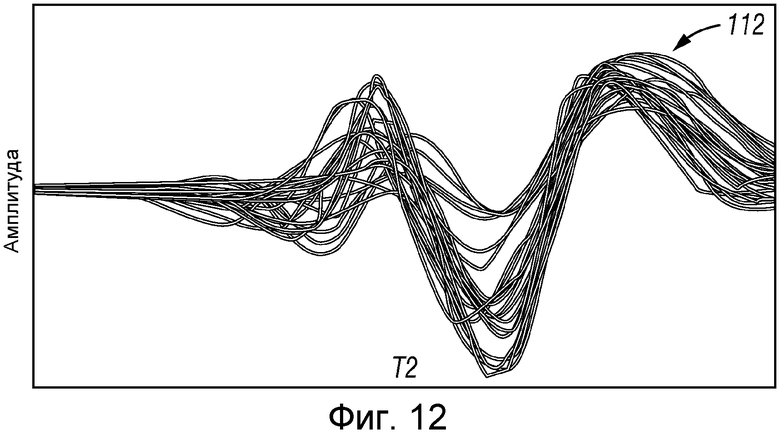

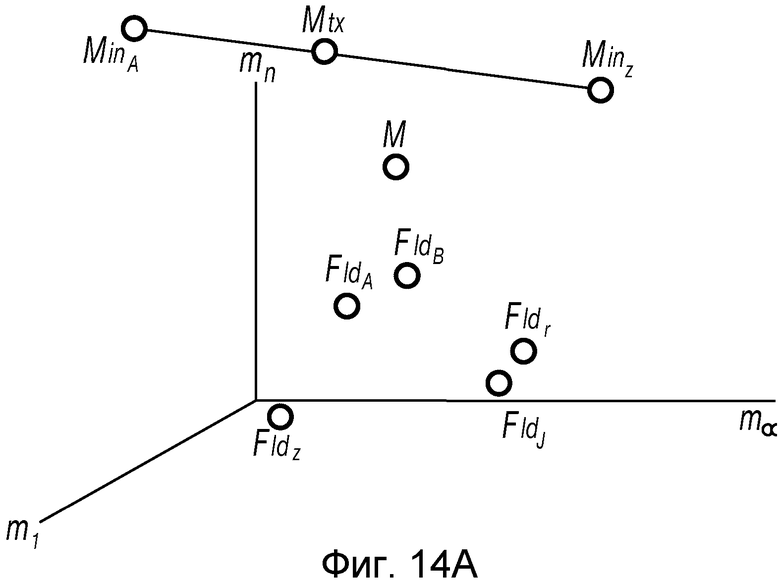
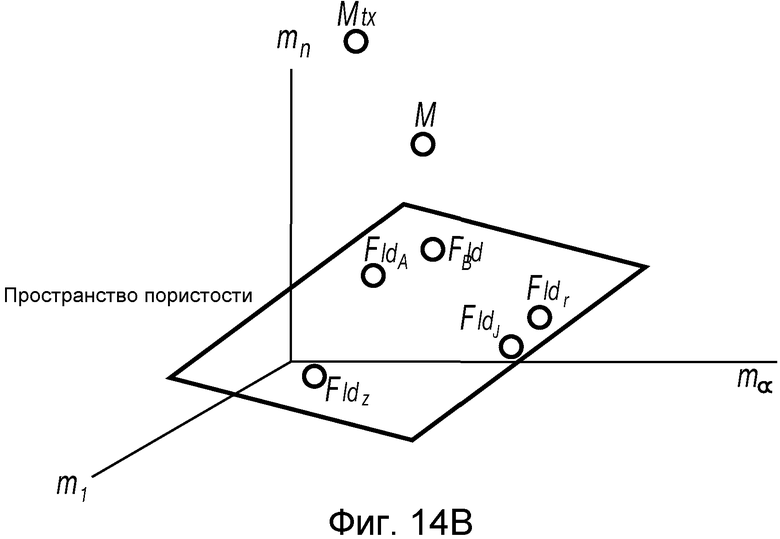

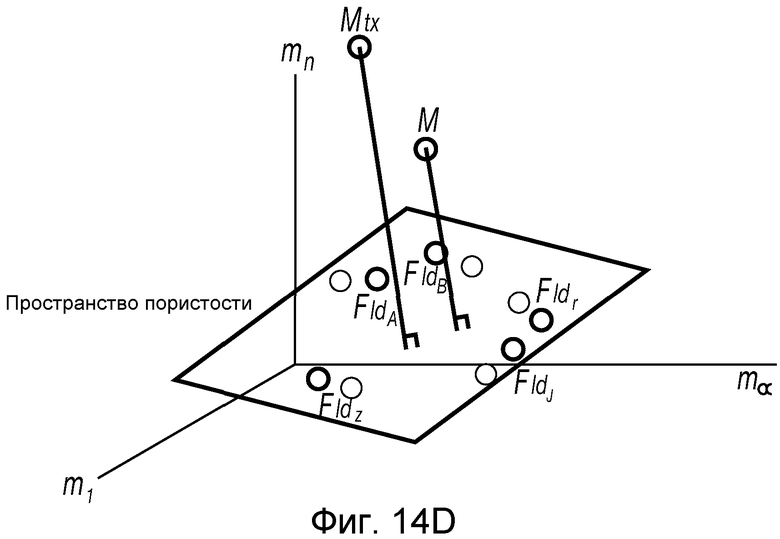
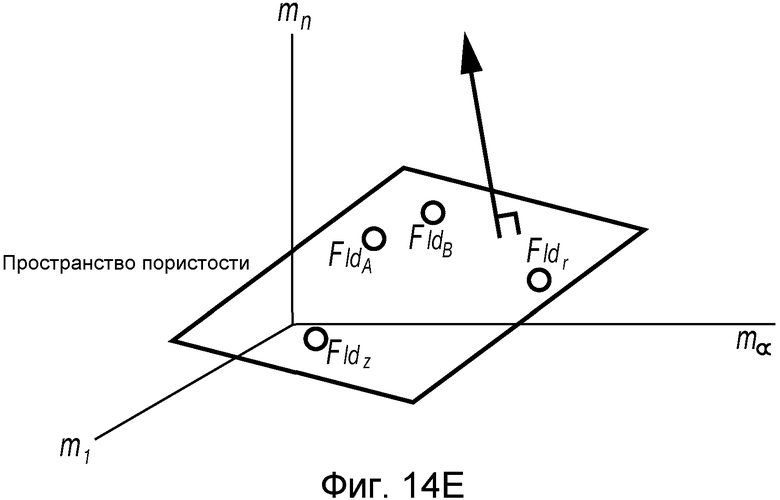
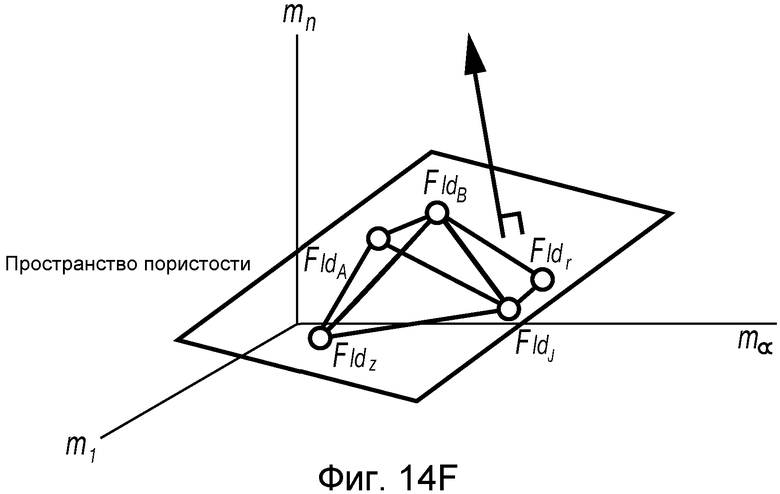
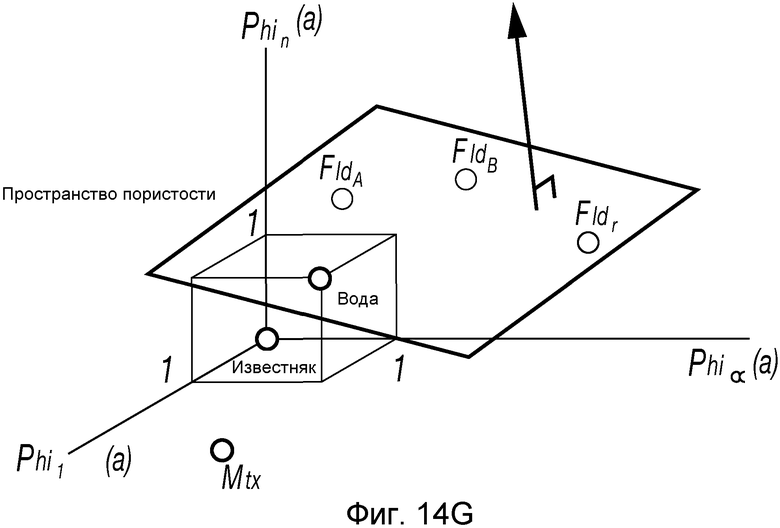

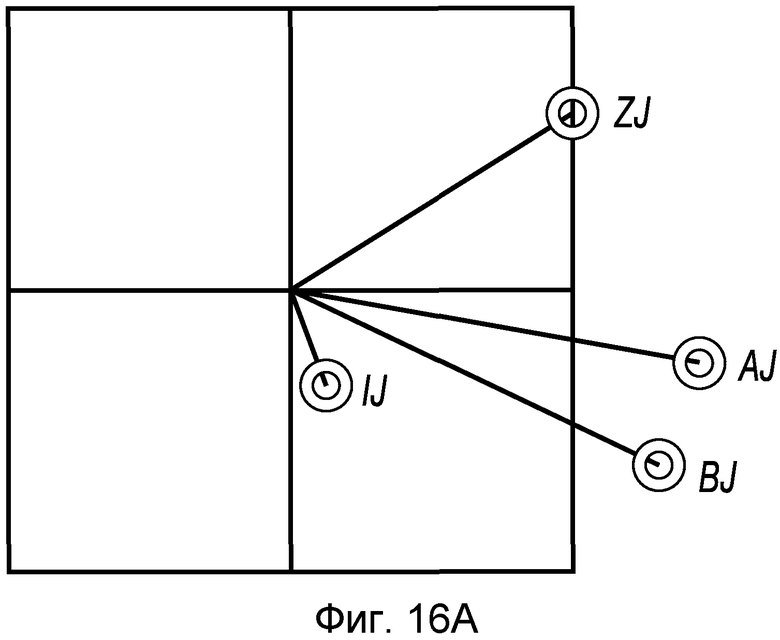

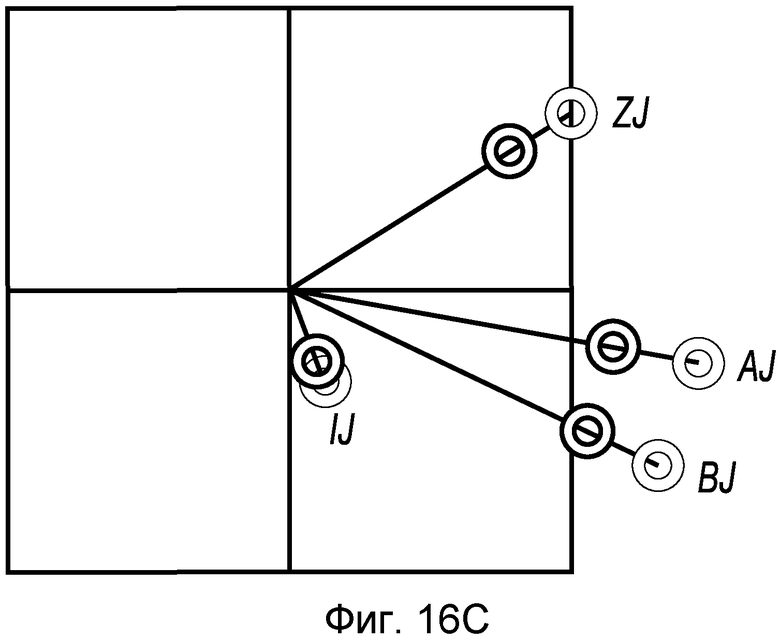





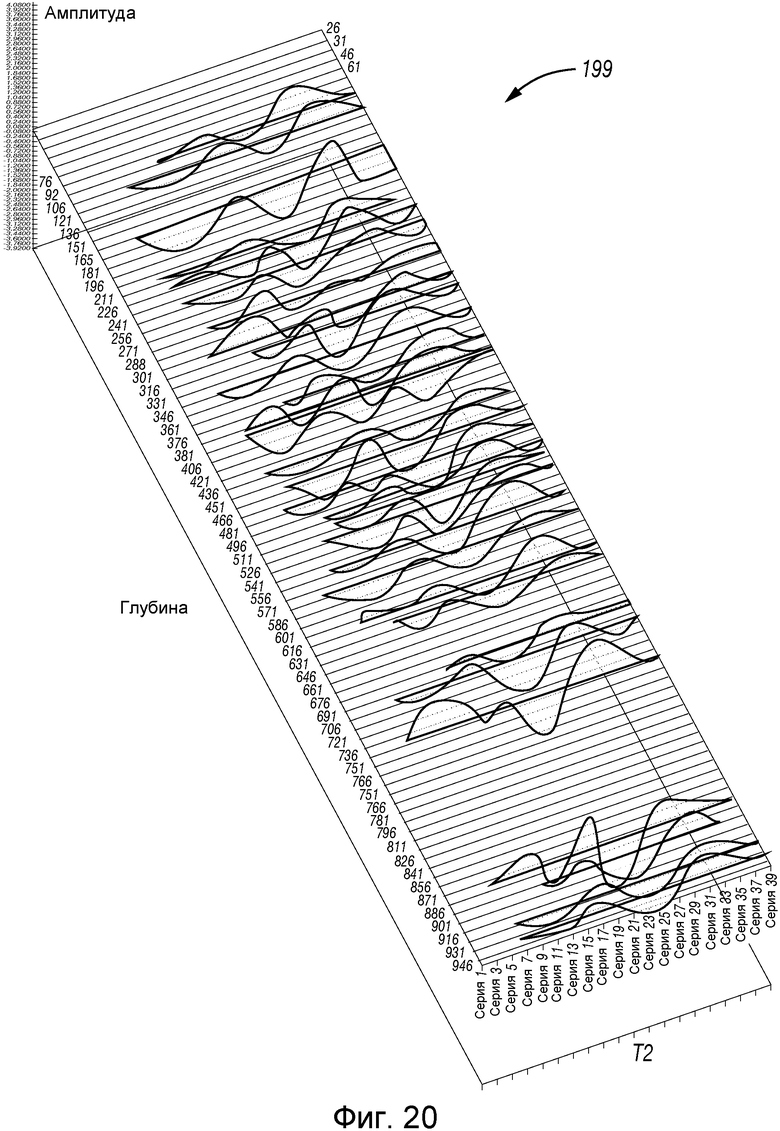





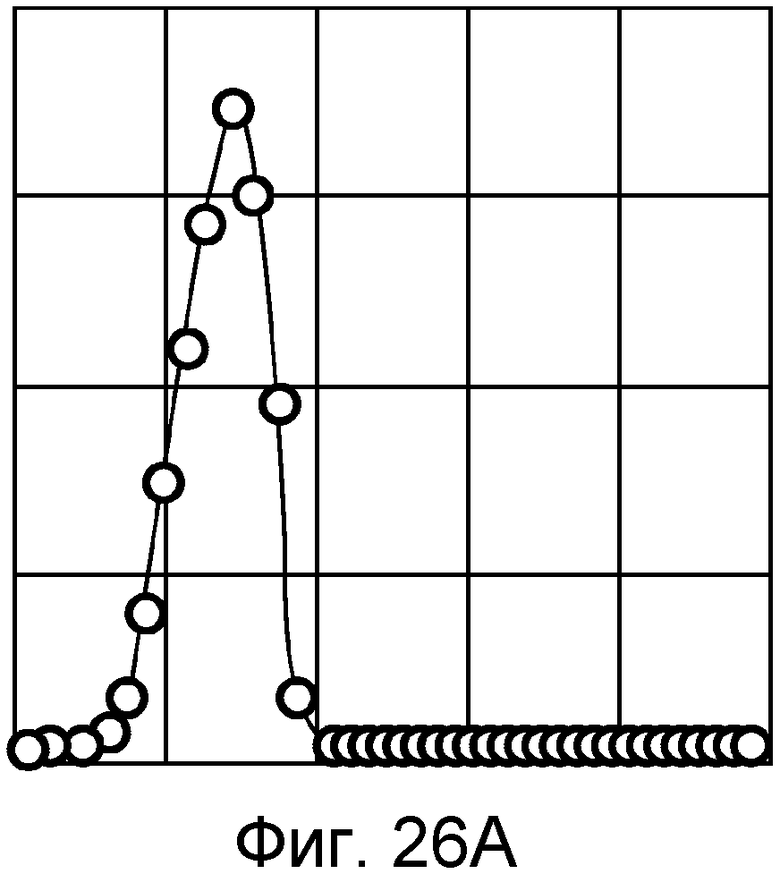


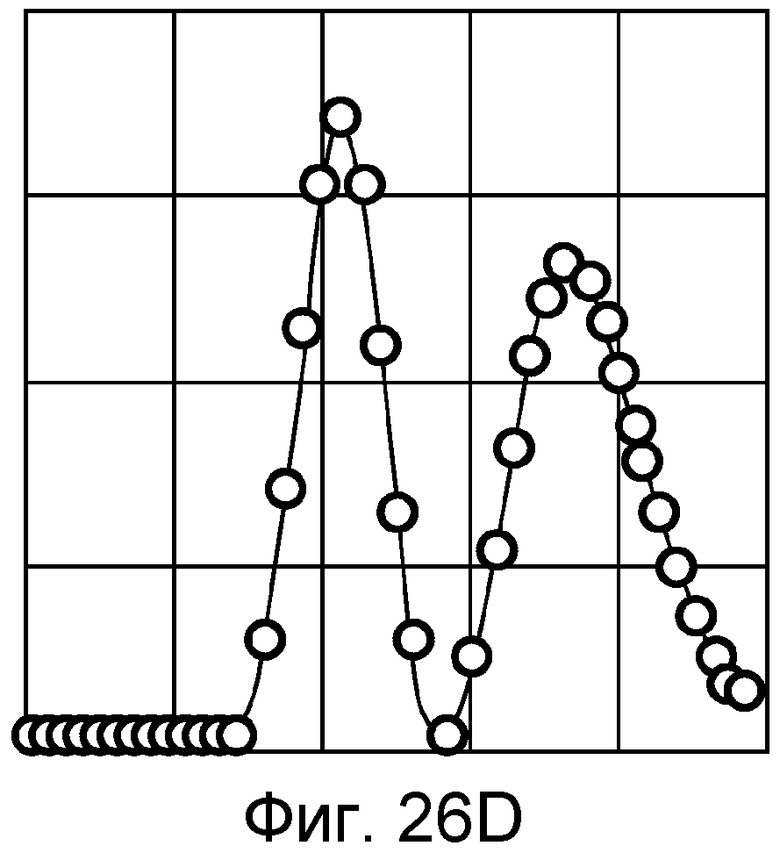
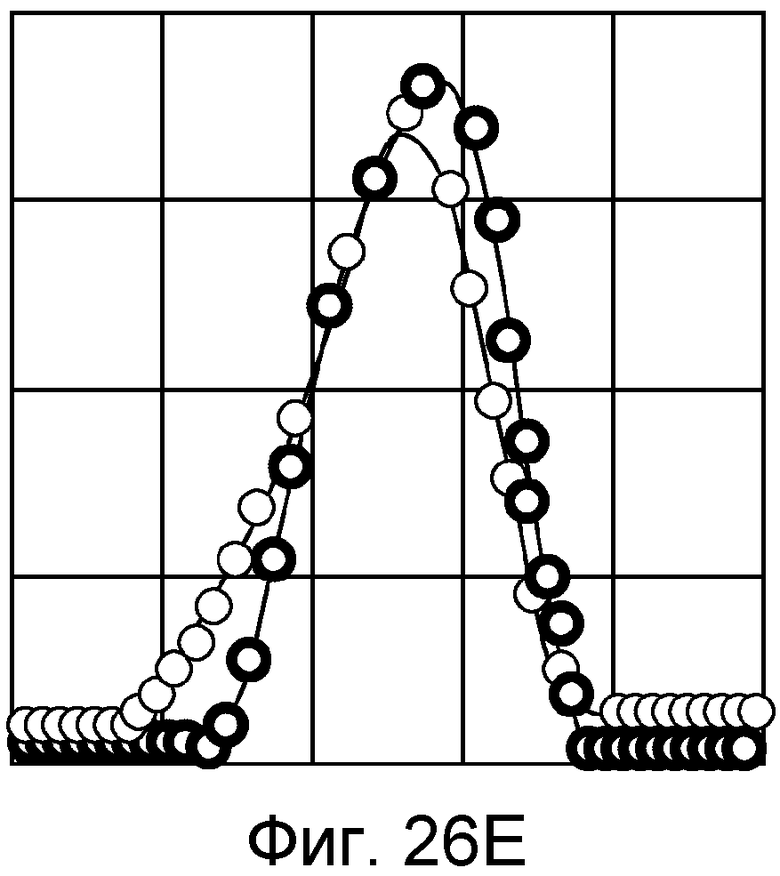
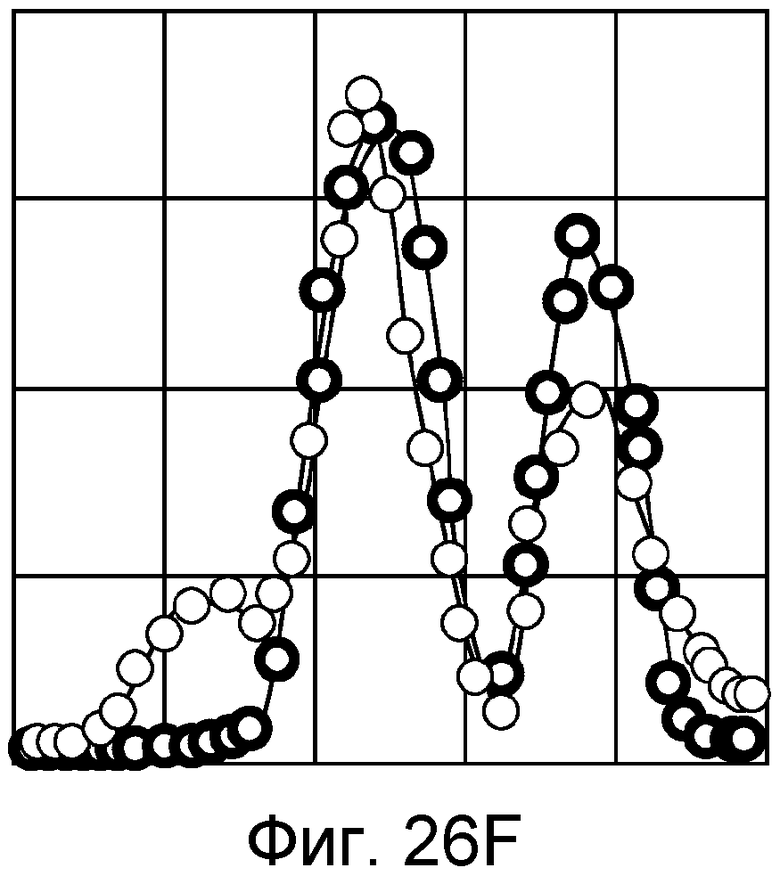
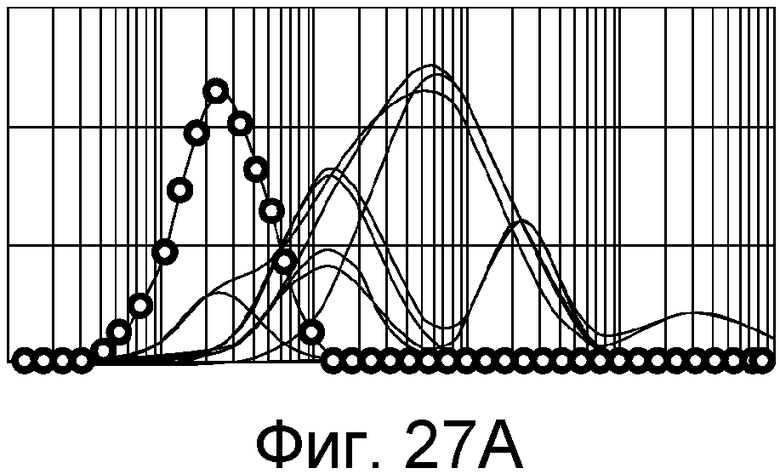

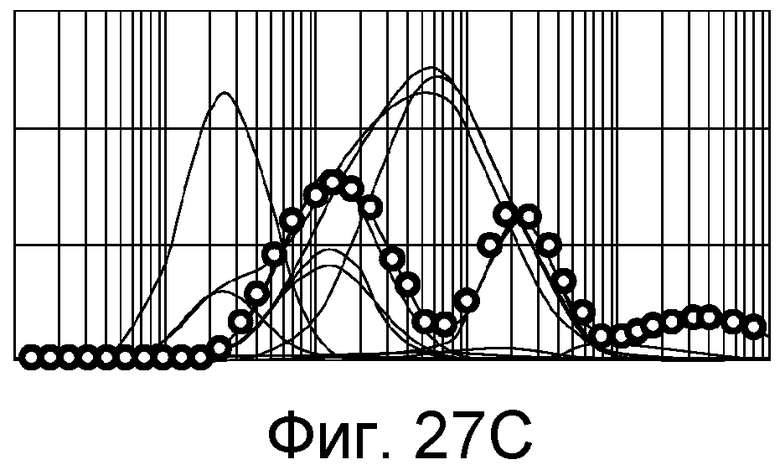

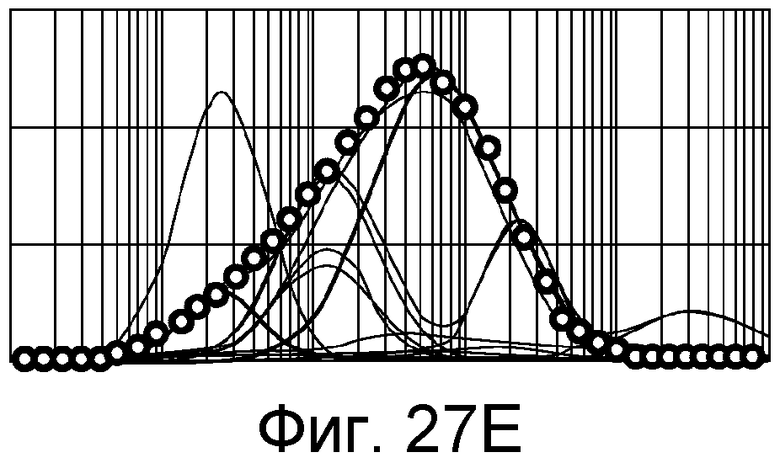



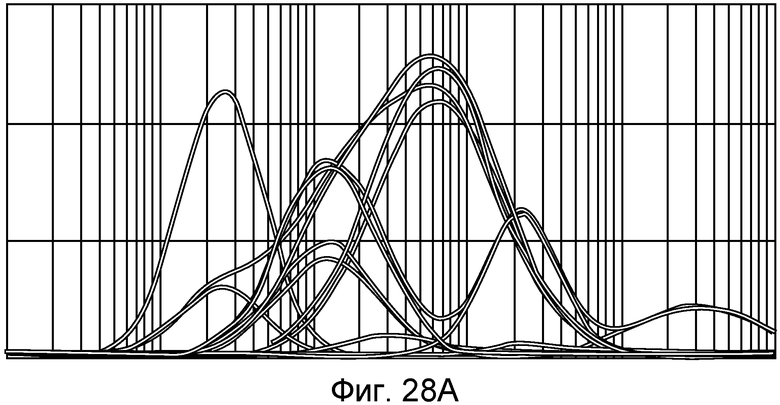
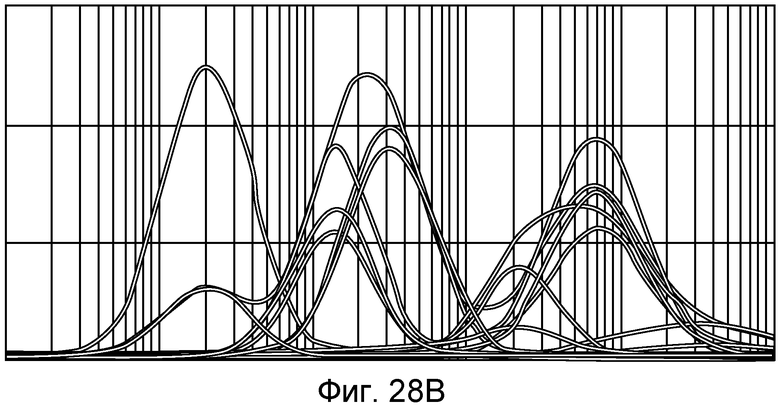

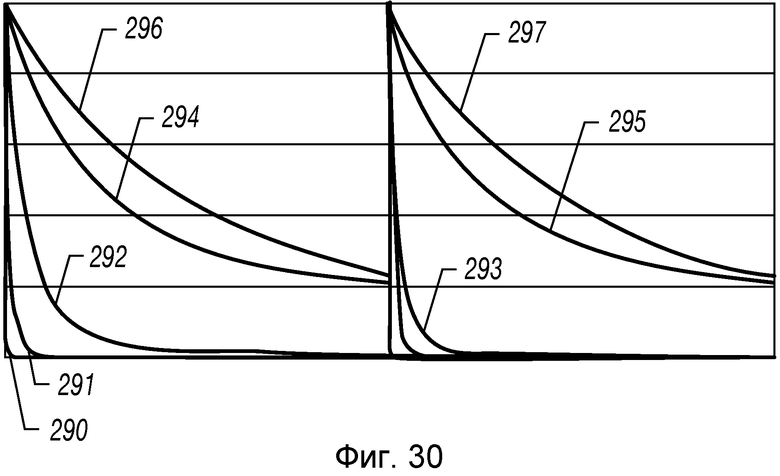
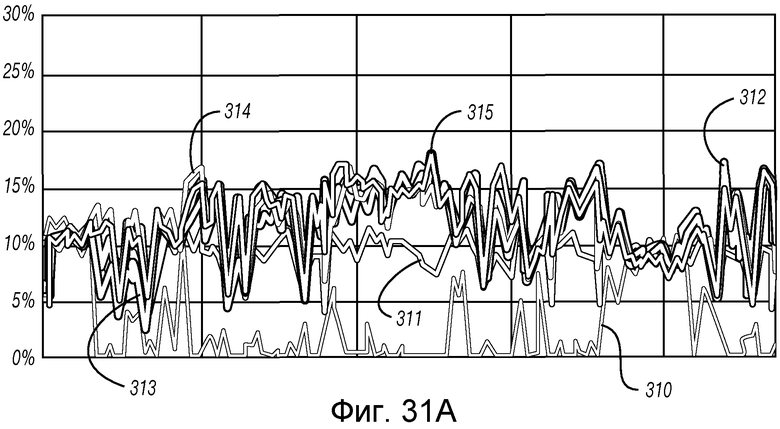


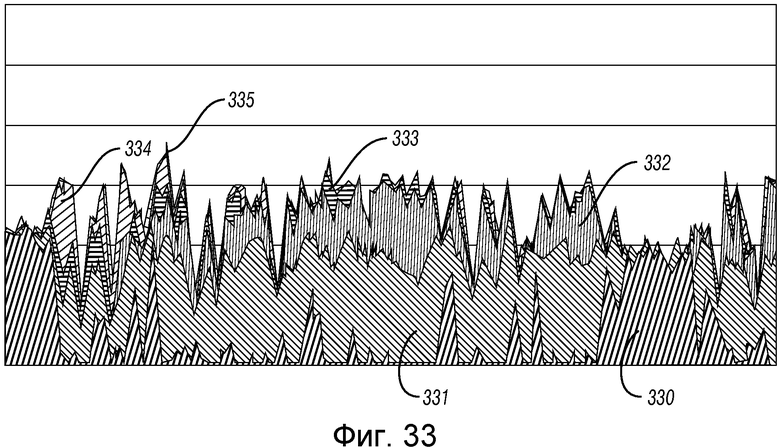


Использование: для измерений качественных показателей пластов. Сущность изобретения заключается в том, что выполняют сбор множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса. Также выполняют идентификацию множества флюидов в геологическом пласте на основании данных ядерного магнитного резонанса, определяют соответствующие сигнатуры ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса, определяют кажущиеся объемы для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и определяют скорректированные объемы для идентифицированных флюидов на основании кажущихся объемов. Технический результат: повышение точности и достоверности при определении характеристик составляющих пласта. 4 н. и 22 з.п. ф-лы, 81 ил.
1. Способ скважинного каротажа геологического пласта, имеющего ствол скважины, при этом способ содержит этапы, на которых:
собирают множество моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса;
идентифицируют множество флюидов в геологическом пласте на основании данных ядерного магнитного резонанса;
определяют соответствующие сигнатуры ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса;
определяют кажущиеся объемы для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и
определяют скорректированные объемы для идентифицированных флюидов на основании кажущихся объемов.
2. Способ по п. 1, в котором моментальные снимки ядерного магнитного резонанса содержат периодически получаемые моментальные снимки ядерного магнитного резонанса.
3. Способ по п. 1, в котором моментальные снимки ядерного магнитного резонанса содержат моментальные снимки ядерного магнитного резонанса (ЯМР) с многочисленных глубин исследования (МГИ).
4. Способ по п. 1, в котором определение скорректированных объемов также содержит:
определение скорректированных кажущихся объемов для идентифицированных флюидов на основании кажущихся объемов и
определение истинных объемов для идентифицированных флюидов на основании скорректированных кажущихся объемов.
5. Способ по п. 1, дополнительно содержащий определение каталога флюидов на основании по меньшей мере одного из водородного индекса и поляризационного фактора; и в котором определение скорректированных объемов содержит определение скорректированных объемов также на основании каталога флюидов.
6. Способ по п. 1, в котором определение скорректированных объемов содержит определение скорректированных объемов путем перераспределения кажущихся объемов при использовании ковариационной матрицы объемов.
7. Способ по п. 1, в котором геологический пласт по длине ствола скважины имеет по меньшей мере один состав основной массы породы, связанный с ним, и в котором определение скорректированных объемов содержит определение скорректированных объемов также на основании по меньшей мере одного состава основной массы породы.
8. Способ по п. 7, в котором ствол скважины по длине пересекает множество зон в геологическом пласте, при этом каждая имеет соответствующий состав основной массы породы, связанный с ней, и в котором определение скорректированных объемов содержит определение скорректированных объемов также на основании соответствующих составов основной массы породы для каждой зоны.
9. Способ по п. 1, в котором определение соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов содержит определение соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов также на основании гауссовой функции.
10. Способ по п. 1, дополнительно содержащий преобразование сигнатур ядерного магнитного резонанса в область эхо-сигналов до определения кажущихся объемов для флюидов.
11. Способ по п. 1, в котором идентификация множества флюидов в геологическом пласте содержит идентификацию множества флюидов на основании граничных значений ядерного магнитного резонанса.
12. Скважинная каротажная система, содержащая:
скважинный каротажный прибор для сбора множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины в геологическом пласте, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса; и
процессор для
идентификации множества флюидов в геологическом пласте на основании данных ядерного магнитного резонанса,
определения соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса,
определения кажущихся объемов для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и
определения скорректированных объемов для идентифицированных флюидов на основании кажущихся объемов.
13. Скважинная каротажная система по п. 12, в которой моментальные снимки ядерного магнитного резонанса содержат периодические получаемые моментальные снимки ядерного магнитного резонанса.
14. Скважинная каротажная система по п. 12, в которой моментальные снимки ядерного магнитного резонанса содержат моментальные снимки ядерного магнитного резонанса (ЯМР) с многочисленных глубин исследования (МГИ).
15. Скважинная каротажная система по п. 12, в которой указанный процессор определяет скорректированные объемы также путем
определения скорректированных кажущихся объемов для идентифицированных флюидов на основании кажущихся объемов и
определения истинных объемов для идентифицированных флюидов на основании скорректированных кажущихся объемов.
16. Скважинная каротажная система по п. 12, в которой указанный процессор определяет скорректированные объемы на основании кажущихся объемов и каталога флюидов, при этом каталог флюидов основан на по меньшей мере одном из водородного индекса и поляризационного фактора.
17. Скважинная каротажная система по п. 12, в которой указанный процессор определяет скорректированные объемы путем перераспределения кажущихся объемов при использовании ковариационной матрицы объемов.
18. Скважинная каротажная система по п. 12, в которой геологический пласт по длине ствола скважины имеет по меньшей мере один состав основной массы породы, связанный с ним, и в которой указанный процесс определяет скорректированные объемы также на основании по меньшей мере одного состава основной массы породы.
19. Считываемый компьютером носитель, имеющий исполняемые компьютером инструкции для побуждения компьютера к
идентификации множества флюидов в геологическом пласте на основании множества моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины в геологическом пласте, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса;
определению соответствующих сигнатур ядерного магнитного резонанса для идентифицированных флюидов на основании данных ядерного магнитного резонанса;
определению кажущихся объемов для идентифицированных флюидов на основании сигнатур ядерного магнитного резонанса и
определению скорректированных объемов для идентифицированных флюидов на основании кажущихся объемов.
20. Считываемый компьютером носитель по п. 19, на котором моментальные снимки ядерного магнитного резонанса содержат периодически получаемые моментальные снимки ядерного магнитного резонанса.
21. Считываемый компьютером носитель по п. 19, на котором моментальные снимки ядерного магнитного резонанса содержат моментальные снимки ядерного магнитного резонанса (ЯМР) с многочисленных глубин исследования (МГИ).
22. Считываемый компьютером носитель по п. 19, на котором скорректированные объемы определяются путем
определения скорректированных кажущихся объемов для идентифицированных флюидов на основании кажущихся объемов и
определения истинных объемов для идентифицированных флюидов на основании скорректированных кажущихся объемов.
23. Считываемый компьютером носитель по п. 19, на котором скорректированные объемы определяются также на основании каталога флюидов, при этом каталог флюидов основан на по меньшей мере одном из водородного индекса и поляризационного фактора.
24. Считываемый компьютером носитель по п. 19, на котором скорректированные объемы определяются путем перераспределения кажущихся объемов при использовании ковариационной матрицы объемов.
25. Считываемый компьютером носитель по п. 19, на котором геологический пласт по длине ствола скважины имеет по меньшей мере один состав основной массы породы, связанный с ним, и на котором скорректированные объемы определяются также на основании по меньшей мере одного состава основной массы породы.
26. Способ скважинного каротажа геологического пласта, имеющего ствол скважины, при этом способ содержит этапы, на которых:
собирают множество моментальных снимков ядерного магнитного резонанса (ЯМР) из ствола скважины, показывающих изменения в геологическом пласте и определяющих данные ядерного магнитного резонанса,
идентифицируют групповую сигнатуру ядерного магнитного резонанса для флюидов, присутствующих в геологическом пласте, на основании данных ядерного магнитного резонанса;
определяют не зависящую от моментальных снимков кажущуюся пористость по данным ядерного магнитного резонанса на основании групповой сигнатуры ядерного магнитного резонанса и данных ядерного магнитного резонанса;
собирают скважинные данные, показывающие минералогию геологического пласта; и
определяют не зависящую от моментальных снимков истинную пористость по данным ядерного магнитного резонанса на основании не зависящей от моментальных снимков кажущейся пористости по данным ядерного магнитного резонанса и минералогии пласта.
| СПОСОБ ОПРЕДЕЛЕНИЯ СВОЙСТВ ПЛАСТОВЫХ ФЛЮИДОВ | 2005 |
|
RU2367981C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТОВОГО ФЛЮИДА ПРИ ЯДЕРНО-МАГНИТНОМ КАРОТАЖЕ | 2006 |
|
RU2393509C2 |
| СПОСОБ ЯДЕРНО-МАГНИТНОГО КАРОТАЖА И УСТРОЙСТВО ЯДЕРНО-МАГНИТНОГО КАРОТАЖА | 2008 |
|
RU2361247C1 |
| АЗИМУТАЛЬНАЯ ЯМР-ВИЗУАЛИЗАЦИЯ СВОЙСТВ ГОРНОЙ ПОРОДЫ ИЗ СТВОЛА СКВАЖИНЫ | 2003 |
|
RU2318224C2 |
| US 20100264914A1, 21.10.2010 | |||
| US 6661226B1, 09.12.2003. | |||

