Изобретение относится к судостроению, в частности к судовой спасательной технике для приема на борт спасательного судна спасательных плавсредств.
Известно техническое решение (авторское свидетельство SU №1625776 А1, 07.02.1991 [1]), техническим результатом которого является повышение безопасности доставки спасательных плавсредств на борт спасательного судна в штормовых условиях.
Известное устройство ([1]) для приема на борт спасательного судна спасательных плавсредств содержит выполненный в кормовой оконечности корпуса судна слип, буксирную лебедку с буксирным тросом, а также узел захвата спасательного плавсредства, связанный с буксирным тросом. Устройство снабжено беспилотным летательным аппаратом 6 с дистанционным управлением, движителем и грузовой лебедкой, смонтированной на корпусе летательного аппарата, а также дополнительной буксирной лебедкой, смонтированной на корпусе спасательного судна и узлом дистанционного управления беспилотным летательным аппаратом. Узел захвата спасательного плавсредства выполнен в виде сетчатой скачкообразной браги с гибким эластичным опорным кольцом в нижней части, сетчатым куполом в верхней части и стяжными кольцами, установленными по периметру эластичного опорного кольца на стяжном тросе. Техническим результатом известного изобретения является повышение безопасности доставки спасательных плавсредств на борт спасательного судна в штормовых условиях.
Однако использование известного устройства ([1]) в условиях шторма является трудоемкой операцией из-за того, что необходимо обеспечить надежное позиционирование спасательного устройства относительно спасательного судна, соединенного с беспилотным летательным аппаратом посредством кабель - шланга.
Кроме того, корпус, органы управления и движитель летательного беспилотного аппарата связаны с узлом дистанционного управления посредством кабель - шланга, что существенно сокращает радиус спасательных работ.
Известен также способ дистанционной разведки (заявка RU №2009146819 А, 17.12.2009 [2]) при ведении аварийно-спасательных работ, состоящий в получении изображений объекта работ с помощью управляемой видеокамеры, установленной на дистанционно пилотируемом малоразмерном летательном аппарате, в котором разведку ведут на основе многоканальной радиосвязи, последовательно производя съемку внутри и снаружи объекта цифровой видеокамерой и расположенным соосно с ней теплопеленгатором, цифровой обработки полученного изображения, очищающей изображение от вибраций, наложения видео- и теплового слоев изображение на экран переносного компьютера, совместной обработки последовательных снимков для получения панорамного изображения, использование сенсоров и лазерного высотомера для исключения столкновения летательного аппарата с препятствием.
Выработка сигналов управления дистанционно пилотируемого малоразмерного летательного аппарата по интерпретации полученных снимков в условиях неблагоприятных погодных условий, негативно влияющих на получение качественных изображений, существенно ограничивает использование известного способа и устройства для его реализации.
Задачей предлагаемого технического решения является повышение безопасности доставки спасательных плавсредств на борт спасательного судна в штормовых условиях.
Поставленная задача решается за счет того, что в устройстве для приема на борт спасательного судна спасательных средств, содержащее выполненный в кормовой оконечности корпуса судна слип, буксирную лебедку с буксирным тросом, а также узел захвата спасательного плавсредства, связанный с буксирным тросом, снабженное беспилотным летательным аппаратом с дистанционным управлением, движителем и грузовой лебедкой, смонтированной на корпусе этого летательного аппарата, и узлом дистанционного управления беспилотным летательным аппаратом, а узел захвата спасательного плавсредства выполнен в виде сетчатой сачкообразной браги с гибким эластичным опорным кольцом в нижней части, сетчатым куполом в верхней части и со стяжными кольцами, установленными по периметру эластичного опорного кольца на стяжном тросе, при этом стяжной трос на гибком эластичном опорном кольце сетчатой сачкообразной браги связан с ходовым концом буксирного троса буксирной лебедки, а купол сетчатой сачкообразной браги связан посредством грузового троса с грузовой лебедкой беспилотного летательного аппарата и с узлом дистанционного управления беспилотным летательным аппаратом, а узел дистанционного управления беспилотным летательным аппаратом связан с органами управления беспилотного летательного аппарата радиоканалом и выполнен в виде системы автоматического управления движением беспилотного летательного аппарата по углам крена, тангажа, скорости, курсу и высоты движения, в котором узел дистанционного управления беспилотным летательным аппаратом содержит комплекс спутниковой радионавигационной системы типа GPS или ГЛОНАСС, посредством которого вырабатывают сигналы управления для беспилотного летательного аппарата с учетом окружающей гидрометеорологической обстановкой в районе проведения спасательных операций и текущих параметров движения беспилотного летательного аппарата.
Сущность предлагаемого технического решения поясняется чертежом.
Устройство для приема на борт спасательного судна 1 спасательных плавсредств 2 содержит выполненный в кормовой оконечности корпуса судна 1 слип 3, буксирную лебедку 4 с буксирным тросом 5, а также узел захвата спасательного плавсредства, связанный с буксирным тросом 5. Устройство снабжено беспилотным летательным аппаратом 6 с дистанционным управлением, движителем 7 и грузовой лебедкой 8, смонтированной на корпусе летательного аппарата 6, узлом дистанционного управления 9 беспилотным летательным аппаратом 6. Узел захвата спасательного плавсредства 2 выполнен в виде сетчатой сачкообразной браги 10 с гибким эластичным опорным кольцом 11 в нижней части, сетчатым куполом 12 в верхней части и стяжными кольцами 13, установленными по периметру эластичного опорного кольца 11 на стяжном тросе 14.
Купол 12 сетчатой сачкообразной браги связан посредством грузового троса 15 с грузовой лебедкой 8 беспилотного летательного аппарата 6, корпус последнего, его движитель 7 и органы управления связаны посредством радиоканала 16 с узлом дистанционного управления 9 беспилотным летательным аппаратом 6, а стяжной трос 14 на гибком эластичном опорном кольце 11 сетчатой сачкообразной браги 10 связан с ходовым концом буксирного троса 5 буксирной лебедки 4.
Радиосвязь между спасательным судном 1 беспилотным летательным аппаратом 6 осуществляется посредством радиоантенны 16 типа ANLI A-100MU и радиомодема типа INTEGRA TR, которые установлены на беспилотном летательном аппарате 6.
Судовой модуль состоит из модуля мультиплексирования и синхронизации данных, а также персонального компьютера.
Система автоматического управления движением беспилотного летательного аппарата включает модуль центрального микроконтроллера, который по заданной программе управляет электроприводом, обеспечивающим движение беспилотного летательного аппарата 6 с учетом текущей скорости, курса, углов крена и тангажа, высоты полета. На плате микроконтроллера типа chip45 SAVVY 128 размещены микроконтроллер Atmel AVRMega 128, слот для установки флэш-памяти типа ММС или SD, микросхема часов реального времени, два порта RS-232, микросхема АЦП типа Analog Device AD7718, микросхемы аналоговых мультиплексоров для совместного использования одного порта RS-232 разными измерительными датчиками текущих параметров движения беспилотного летательного аппарата 6, контроллер движителя 7 типа IR3320S и конверторы напряжения питания. Аналоговые каналы оцифровываются с помощью одной 16-разрядной АЦП. С судового компьютера спасательного судна 1 вносится программа работы беспилотного летательного аппарата 6 и выполняются просмотр и обработка полученных данных. Модуль центрального микроконтроллера передает данные с помощью индуктивного модема типа SBE-44 на аналогичный судовой индуктивный модем. Индуктивные модемы служат для передачи текущей телеметрической информации, которая используется для выработки сигналов управления для беспилотного летательного аппарата 6 с учетом окружающей гидрометеорологической обстановкой в районе проведения спасательных операций и текущих параметров движения беспилотного летательного аппарата 6.
Позиционирование беспилотного летательного аппарата 6 относительно спасательного судна 1 и местонахождения спасательного средства 2 осуществляется посредством судового комплекса спутниковой радионавигационной системы типа GPS или ГЛОНАСС.
Беспилотный летательный аппарат 6 может быть выполнен с вертикальным взлетом и посадкой.
Устройство для приема на борт спасательных судов спасательных плавсредств с покинутых экипажем судов эксплуатируется с последовательным выполнением следующих операций.
Беспилотный летательный аппарат 6 поднимается с буксира - спасательного судна 1, управляется по радиоканалу 16, выводится до положения зависания над плавсредством 2 сетчатой сачкообразной браги 10, подвешенной к летательному беспилотному аппарату 6. Затем опускается сетчатая сачкообразная брага 10 на плавсредство 2, так чтобы ее опорное кольцо 11 достигло глубины погружения плавсредства 2. Опорное кольцо 11 сетчатой сачкообразной браги затягивается, после чего выбирается буксирный трос 5 и по слипу 3 плавсредство 2 втаскивается на спасательное судно 1.
Источники информации
1. Авторское свидетельство SU №1625776 А1, 07.02.1991.
2. Заявка RU №2009146819 А, 17.12.2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема на борт спасательного судна спасательных плавсредств | 1988 |
|
SU1625776A1 |
| Комплекс аварийной эвакуации на лёд персонала и экипажа морских платформ | 2019 |
|
RU2720757C1 |
| КАМЕРА СПАСАТЕЛЬНАЯ ВСПЛЫВАЮЩАЯ | 2011 |
|
RU2479463C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| Система экстренной эвакуации персонала морских платформ в ледовых условиях | 2019 |
|
RU2718799C1 |
| СИСТЕМА ОБРАБОТКИ УЛОВА | 2018 |
|
RU2768323C2 |
| Надувное спасательное средство | 1990 |
|
SU1752653A1 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| Способ эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры и устройство для его осуществления | 2020 |
|
RU2756949C1 |
| СПАСАТЕЛЬНЫЙ ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2752038C2 |

Изобретение относится к судостроению, в частности к судовой спасательной технике. Устройство для приема на борт спасательного судна спасательных средств содержит в кормовой оконечности корпуса судна слип, буксирную лебедку с буксирным тросом, узел захвата спасательного плавсредства и беспилотный летательный аппарат с дистанционным управлением. На корпусе летательного аппарата смонтированы грузовая лебедка и узел дистанционного управления. Узел захвата спасательного плавсредства выполнен в виде сетчатой сачкообразной браги с гибким эластичным опорным кольцом в нижней части. Стяжной трос на гибком эластичном опорном кольце сетчатой сачкообразной браги связан с ходовым концом буксирного троса буксирной лебедки. Узел дистанционного управления беспилотным летательным аппаратом связан с органами управления беспилотного летательного аппарата радиоканалом и выполнен в виде системы автоматического управления движением беспилотного летательного аппарата, а также содержит комплекс спутниковой радионавигационной системы типа GPS или ГЛОНАСС. Достигается повышение безопасности доставки спасательных плавсредств на борт спасательного судна. 1 ил.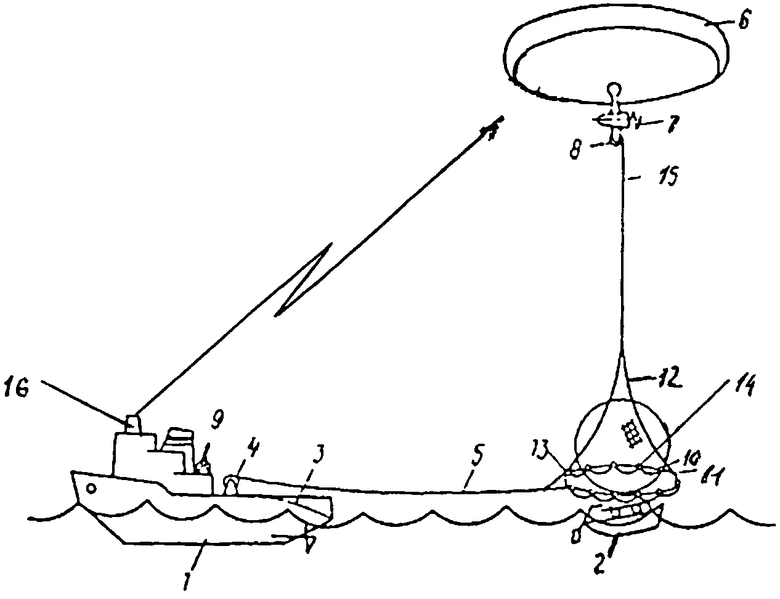
Устройство для приема на борт спасательного судна спасательных средств, содержащее выполненный в кормовой оконечности корпуса судна слип, буксирную лебедку с буксирным тросом, а также узел захвата спасательного плавсредства, связанный с буксирным тросом, снабженное беспилотным летательным аппаратом с дистанционным управлением, движителем и грузовой лебедкой, смонтированной на корпусе этого летательного аппарата, и узлом дистанционного управления беспилотным летательным аппаратом, а узел захвата спасательного плавсредства выполнен в виде сетчатой сачкообразной браги с гибким эластичным опорным кольцом в нижней части, сетчатым куполом в верхней части и со стяжными кольцами, установленными по периметру эластичного опорного кольца на стяжном тросе, при этом стяжной трос на гибком эластичном опорном кольце сетчатой сачкообразной браги связан с ходовым концом буксирного троса буксирной лебедки, а купол сетчатой сачкообразной браги связан посредством грузового троса с грузовой лебедкой беспилотного летательного аппарата и с узлом дистанционного управления беспилотным летательным аппаратом, а узел дистанционного управления беспилотным летательным аппаратом связан с органами управления беспилотного летательного аппарата радиоканалом и выполнен в виде системы автоматического управления движением беспилотного летательного аппарата по углам крена, тангажа, скорости, курсу и высоты движения, отличающееся тем, что узел дистанционного управления беспилотным летательным аппаратом содержит комплекс спутниковой радионавигационной системы типа GPS или ГЛОНАСС, посредством которого вырабатывают сигналы управления для беспилотного летательного аппарата с учетом окружающей гидрометеорологической обстановкой в районе проведения спасательных операций и текущих параметров движения беспилотного летательного аппарата.
| Устройство для приема на борт спасательного судна спасательных плавсредств | 1988 |
|
SU1625776A1 |
| RU 2009146819 A, 27.06.2011 | |||
| US 6678395 B2, 13.01.2004. | |||

