Область техники, к которой относится изобретение
Настоящее изобретение относится к рыбопромысловому флоту, содержащему устройства для сбора, транспортировки и переработки улова.
Уровень техники
При традиционном осуществлении тралового лова рыбы, независимо от того, одно или более судов (в случае близнецового траления) буксируют один или более тралов, все оборудование и рабочее время используется в процессе лова для подъема трала на борт судна и сбора улова, скопившегося в кутке. Время, затраченное на такой подъем, представляет собой время работы судовых двигателей в режиме холостого хода, когда активный лов рыбы не осуществляется. Кроме того, каждый такой подъем вызывает значительный износ тралового оборудования.
Размеры снастей и количество тралов, используемых для лова рыбы, ограничены тем фактом, что каждый трал должен быть поднят на борт буксирного судна, чтобы обеспечить возможность сбора улова.
Это накладывает ограничение на количество подъемов в течение 24-часового периода, чтобы исключить нежелательно длительное время работы при отсутствии лова рыбы, а также, чтобы уменьшить износ снастей и повысить безопасность палубной команды. Вследствие этого существенная часть улова, в конечном итоге поднятая на борт, пребывает значительное количество времени на дне кутка, что увеличивает опасность гибели и повреждений от давления отдельных особей в улове, пойманных в начале цикла. Качество улова дополнительно ухудшается, если вытягивать куток сухим и уплотненным через кормовой слип судна. Улов может быть оставлен на слипе в течение нескольких минут перед подачей в приемные бункеры в ожидании переработки.
Пример непрерывного траления приведен в документе FR 1399321 А. Раскрытая система содержит трал с открытым кутком, при этом к кутку присоединен гибкий шланг. Указанный гибкий шланг соединен с насосной станцией, которая также соединена с гибким шлангом, сообщающимся с рыболовным судном. Назначение такой системы заключается в том, чтобы обеспечить непрерывный траловый лов, поскольку куток может непрерывно опорожняться за счет откачивания рыбы. Насосная станция имеет возможность маневрирования, регулируя при этом глубину гибких шлангов, что может быть существенным для опорожнения/откачивания рыбы из кутка. Насосная станция содержит две камеры: одну камеру для заполнения и одну камеру для выгрузки рыбы из насосной станции.
В US 2013/305975 А1 предусмотрена система лова для добычи глубоководных биологических образцов/органических материалов со дна моря. Система ориентирована на проведение исследований, а не на рыбопромысловый флот, систему сбора улова, систему транспортирования улова или на транспортную систему. Биологические образцы захватываются глубоководным устройством, форма которого аналогична торпеде. Глубоководное устройство спускается на воду с судна и погружается к дну моря, при этом верхний конец торпеды направлен вертикально вниз под действием груза, расположенного в верхней части глубоководного устройства. На дне моря после захвата улова в камеру глубоководного устройства груз отделяется от глубоководного устройства. Нос глубоководного устройства заполняет блок плавучести, который поднимает конец глубоководного устройства в вертикальном направлении, и под действием блока плавучести глубоководное устройство поднимается в вертикальном направлении. Для ускорения подъема глубоководное устройство снабжено приводным устройством.
Задача настоящего изобретения заключается в том, чтобы решить вышеуказанные проблемы, связанные с известными траловыми системами.
Раскрытие сущности изобретения
Вышеуказанные проблемы решены согласно настоящему изобретению за счет обеспечения системы сбора, содержащей по меньшей мере одно депо, по меньшей мере один трал, при этом по меньшей мере один из указанных тралов содержит соединительное устройство для обеспечения разъемного соединения с транспортировочным контейнером, при этом указанное разъемное соединение выполнено с возможностью транспортирования содержимого трала к транспортировочному контейнеру, а указанное соединительное устройство образует разъемное соединение с транспортировочным контейнером. В одном варианте осуществления соединительное устройство вместе с транспортировочным контейнером выполнено с возможностью маневрирования относительно по меньшей мере одного судна.
Соединительное устройство вместе с транспортировочным контейнером может быть соединено с судном для опорожнения содержимого транспортировочного контейнера. Согласно аспекту изобретения обеспечен рыбопромысловый флот, содержащий по меньшей мере:
а) по меньшей мере одну первую систему обработки улова, при этом указанная по меньшей мере одна первая система обработки улова содержит по меньшей мере:
i. по меньшей мере одну систему сбора улова, в свою очередь содержащую:
1. по меньшей мере одно депо для обработки улова,
2. один или более тралов, и
3. по меньшей мере одну систему транспортирования улова, при этом указанная система транспортирования улова содержит по меньшей мере одну транспортную систему и один транспортировочный беспилотный аппарат. В одном аспекте депо для обработки улова представляет собой одно из следующего: траловое судно, рыбопромысловая плавучая база, рыбоприемный пункт и накопительный контейнер.
Система обработки улова может также содержать накопительный контейнер. Накопительный контейнер может иметь поверхность выполненную, в основном, из непроницаемого материала.
Накопительный контейнер может иметь поверхность выполненную, в основном, из проницаемого материала.
Указанная транспортная система может также содержать транспортировочный контейнер и транспортировочный узел.
Настоящее изобретение обеспечивает также систему обработки улова, содержащую по меньшей мере:
а) по меньшей мере одну систему сбора улова, в свою очередь, содержащую:
i. одно депо для обработки улова,
ii. один или более тралов, и
iii. по меньшей мере одну систему транспортирования улова,
при этом указанная система транспортирования улова содержит по меньшей мере одну транспортную систему и один транспортировочный беспилотный аппарат.
Депо для обработки улова может представлять собой одно из следующего: траловое судно, рыбопромысловая плавучая база, рыбоприемный пункт и накопительный контейнер.
Система обработки улова может также содержать накопительный контейнер.
Накопительный контейнер может иметь поверхность выполненную, в основном, из непроницаемого материала или он может иметь поверхность выполненную, в основном, из проницаемого материала.
Указанная транспортная система может также содержать транспортировочный контейнер и транспортировочный узел.
В одном аспекте траловое судно буксирует по меньшей мере один трал, при этом куток содержит устройство для разъемного соединения с транспортировочным узлом, и при этом указанный транспортировочный узел содержит устройство для разъемного соединения с указанным транспортировочным контейнером. Указанное устройство для разъемного соединения с кутком и транспортировочным узлом может представлять собой разгрузочную заслонку с дистанционным управлением, расположенную на задней стороне кутка.
В одном аспекте указанный транспортировочный беспилотный аппарат содержит устройство для перемещения указанного транспортировочного узла.
Другие достоинства настоящего изобретения будут очевидными из прилагаемой формулы изобретения.
Краткое описание чертежей
Для упрощения понимания настоящего изобретения используются ссылки на прилагаемые чертежи, на которых показано следующее.
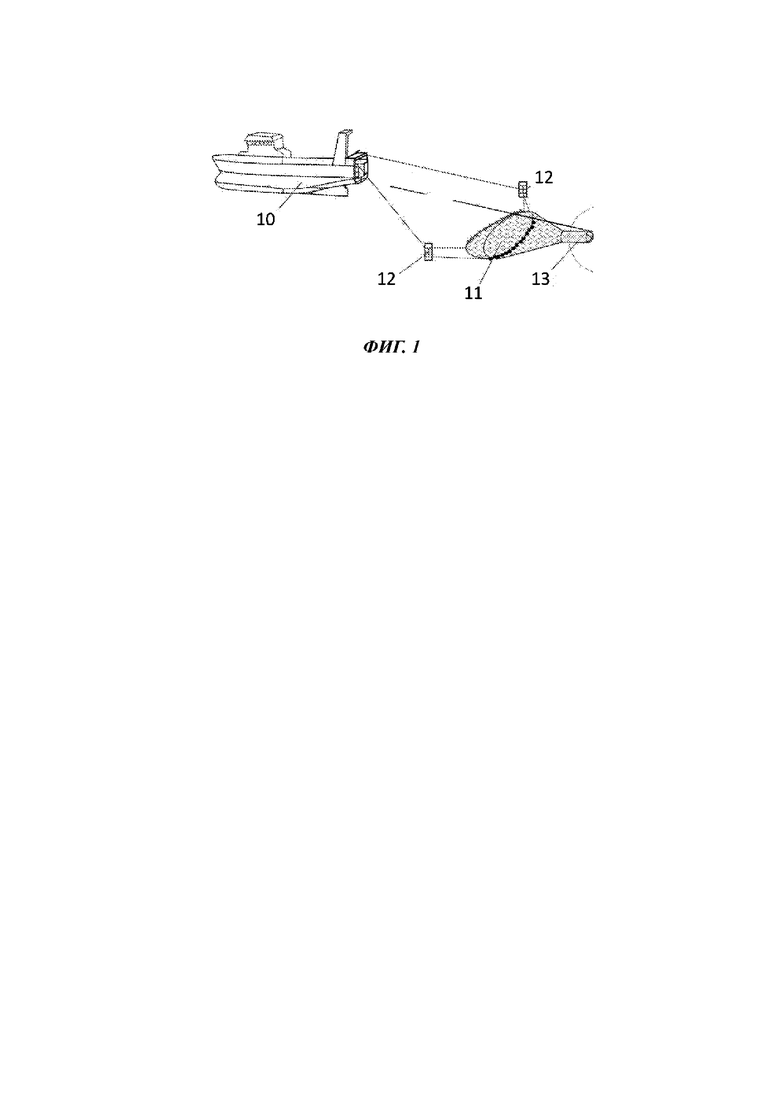
На фиг. 1 представлено одиночное рыболовное судно 10, осуществляющее траление одним тралом 11, содержащим куток 13, согласно известному уровню техники.
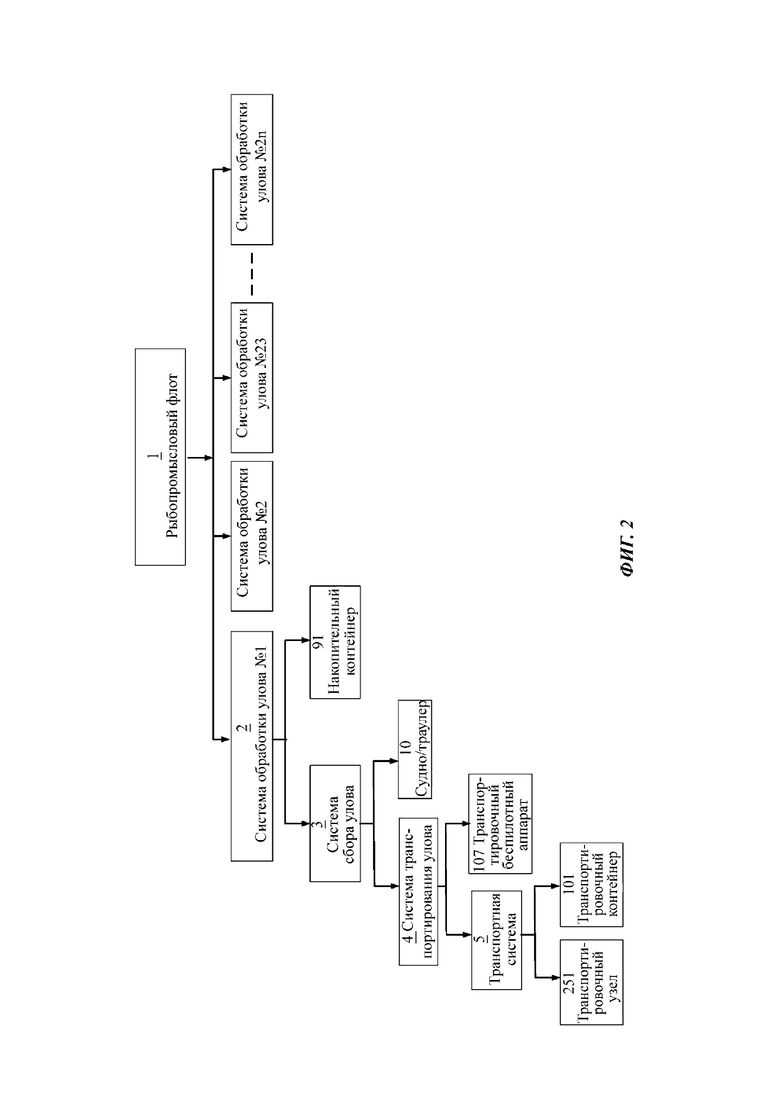
На фиг. 2 представлены элементы и подсистемы рыбопромыслового флота согласно настоящему изобретению.
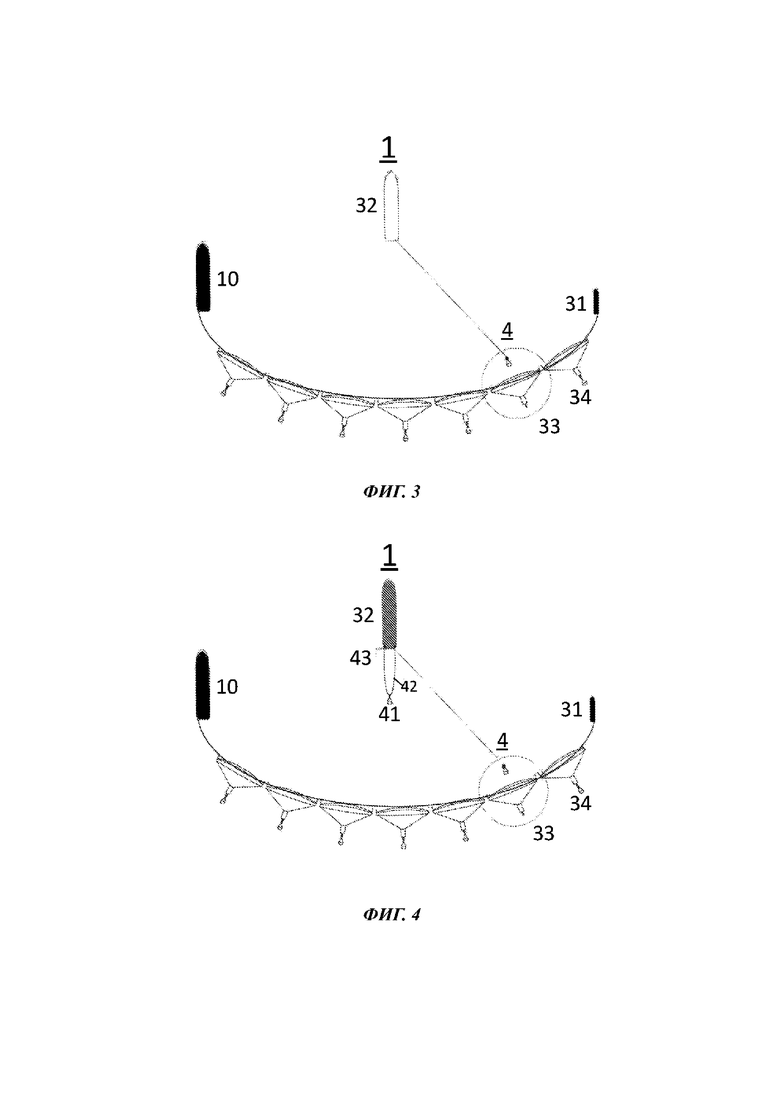
На фиг. 3 представлен рыбопромысловый флот, содержащий несколько судов и несколько тралов, а также по меньшей мере одну систему транспортирования улова.
На фиг. 4 представлен рыбопромысловый флот 1, содержащий несколько судов и несколько тралов, а также по меньшей мере одну систему транспортирования улова.
На фиг. 5 представлен рыбопромысловый флот, содержащий несколько судов и несколько тралов, а также по меньшей мере одну систему 4 транспортирования улова в конфигурации, отличной от показанных на фиг. 3 и 4.
На фиг. 6 представлен рыбопромысловый флот 1, содержащий несколько судов и несколько тралов, а также по меньшей мере одну систему 4 транспортирования улова, при этом рыбопромысловый флот, показанный на этой фигуре, содержит проводное и/или беспроводное устройство связи, одну или более камер или систем камер и, возможно, также датчики.
На фиг. 7 представлен трал 72 автономного сбора.
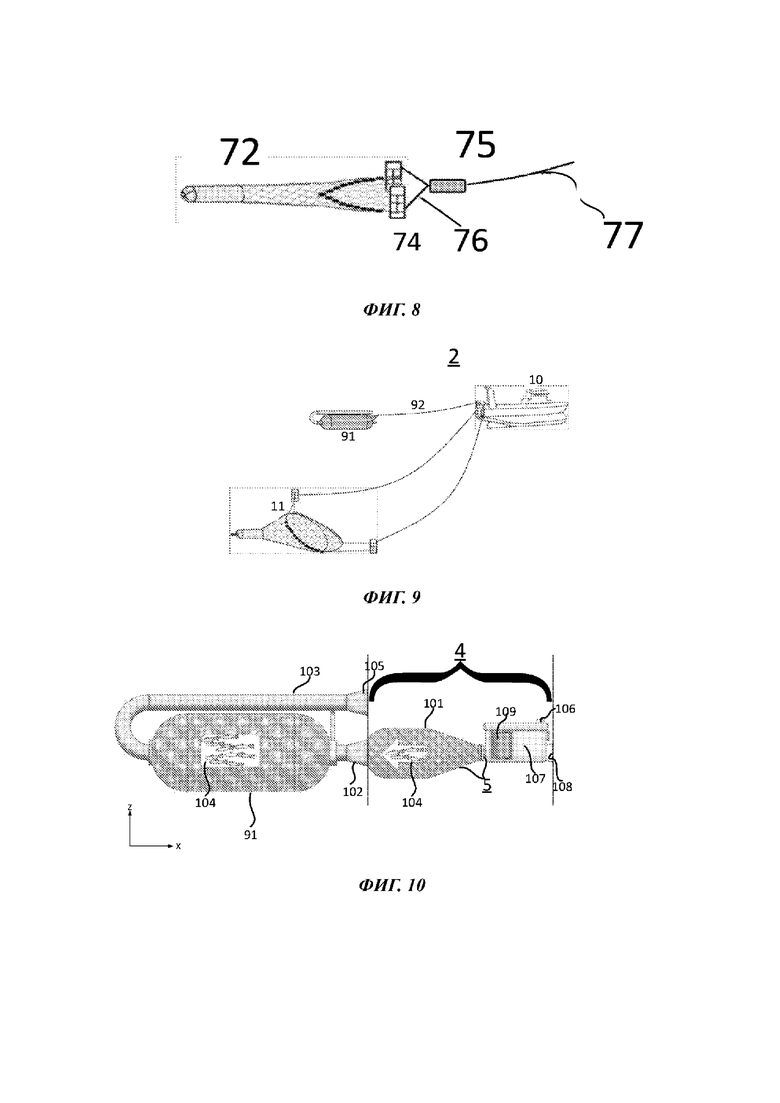
На фиг. 8 представлен трал 72 автономного сбора в частично сложенной конфигурации.
На фиг. 9 представлена система 2 обработки улова, содержащая тралы, накопительный контейнер 91 и трал 11.
На фиг. 10 представлена система 4 транспортирования улова, содержащая транспортировочный беспилотный аппарат 107 и транспортную систему 5, содержащую улов и соединенную с накопительным контейнером 91.
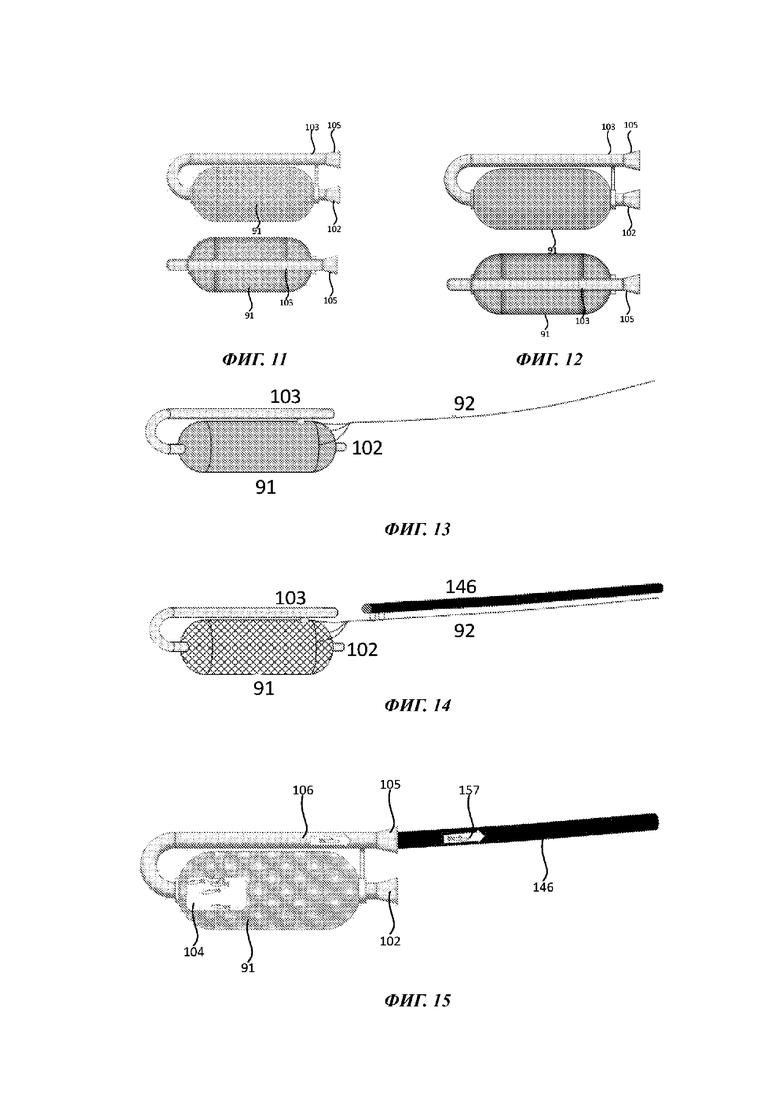
На фиг. 11 представлен накопительный контейнер 91, выполненный из частично проницаемого материала.
На фиг. 12 представлен накопительный контейнер 91, выполненный из непроницаемого материала.
На фиг. 13 представлен накопительный контейнер 91 с буксирным устройством и разгрузочным трубопроводом.
На фиг. 14 представлен накопительный контейнер 91, выполненный из материала, свободно пропускающего воду, при этом показан также разгрузочный шланг/труба для соединения с разгрузочным трубопроводом 103 накопительного контейнера.
На фиг. 15 представлено опорожнение накопительного контейнера 91 через шланг 146.
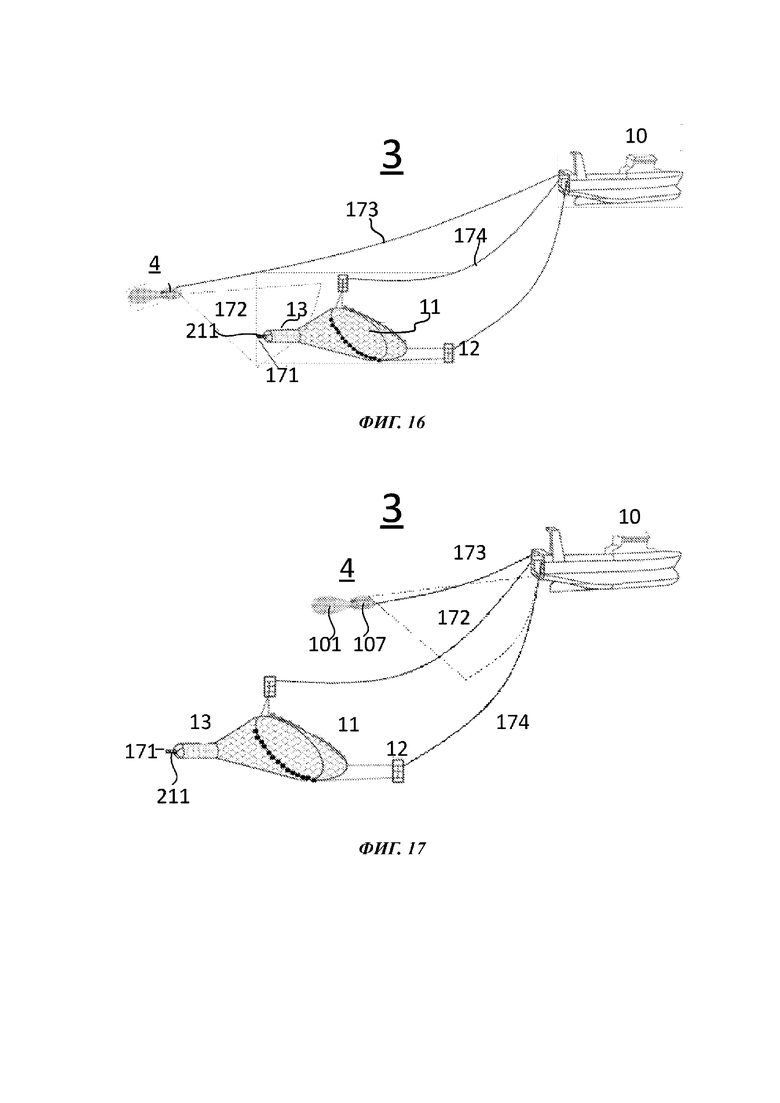
На фиг. 16 представлена система 3 сбора улова, в которой система 4 транспортирования улова снабжена гидролокационным аппаратом.
На фиг. 17 представлена система 3 сбора улова с фиг. 16 с системой 4 транспортирования улова, расположенной в другой позиции.
На фиг. 18 представлена система 3 сбора улова с фиг. 16 и 17, с системой 4 транспортирования улова, расположенной в другой позиции.
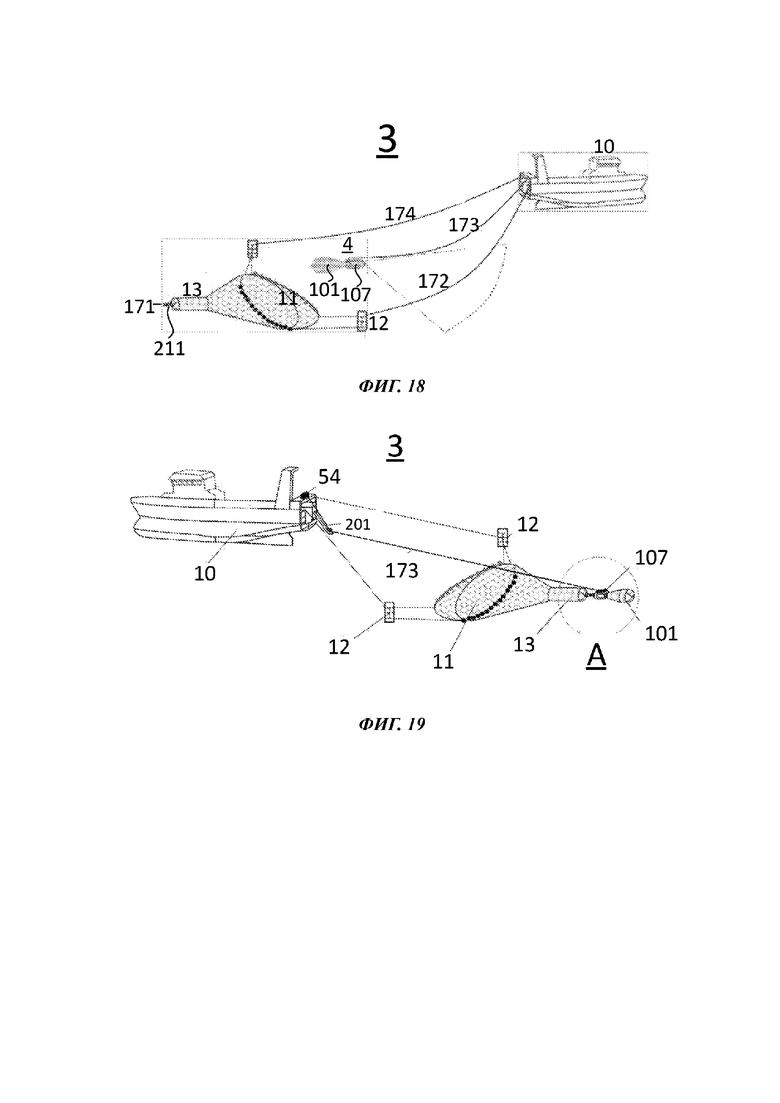
На фиг. 19 представлена система 3 сбора улова, содержащая траулер 10, трал 11, транспортировочный контейнер 101 и транспортировочный беспилотный аппарат 107, при этом транспортировочный контейнер 101 соединен с транспортировочным узлом 251, не показанным на фигуре.
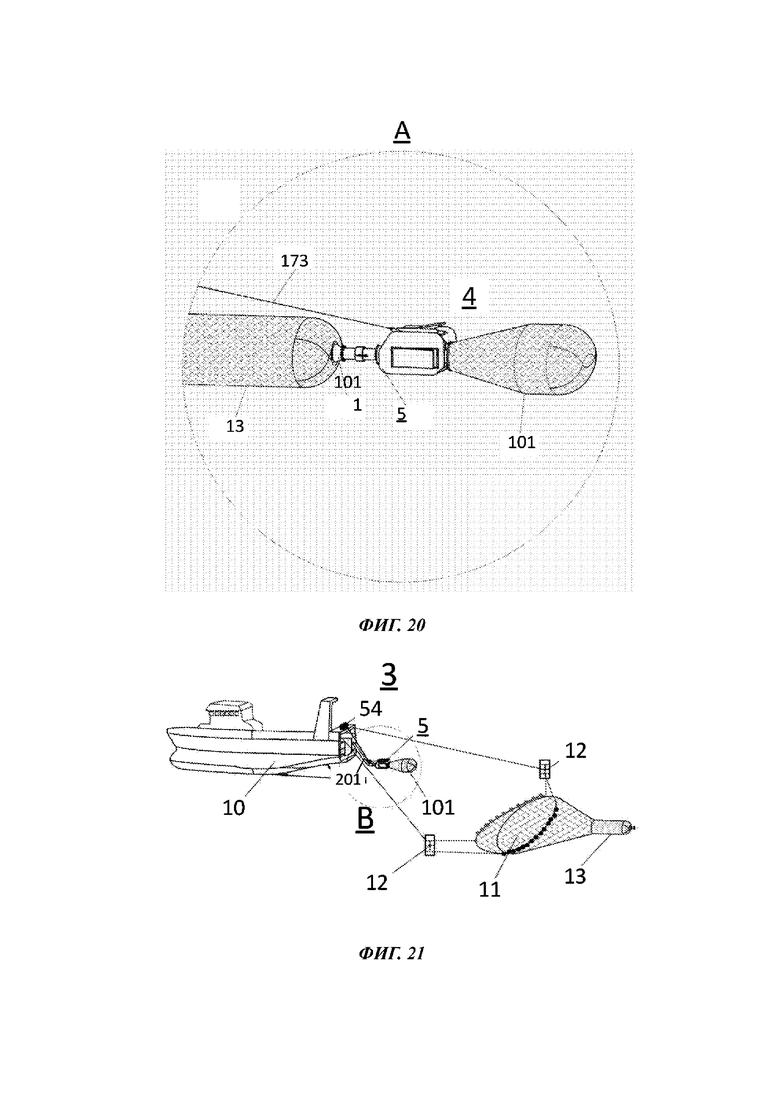
На фиг. 20 представлена часть А системы сбора улова с фиг. 19, содержащая систему 4 транспортирования улова.
На фиг. 21 представлена система 3 сбора улова, содержащая траулер 10, трал 11 и транспортировочный беспилотный аппарат 107, соединенный с транспортировочным контейнером 101 при помощи соединительного устройства и сточкой 201 выгрузки на траулере 10 для выгрузки улова.
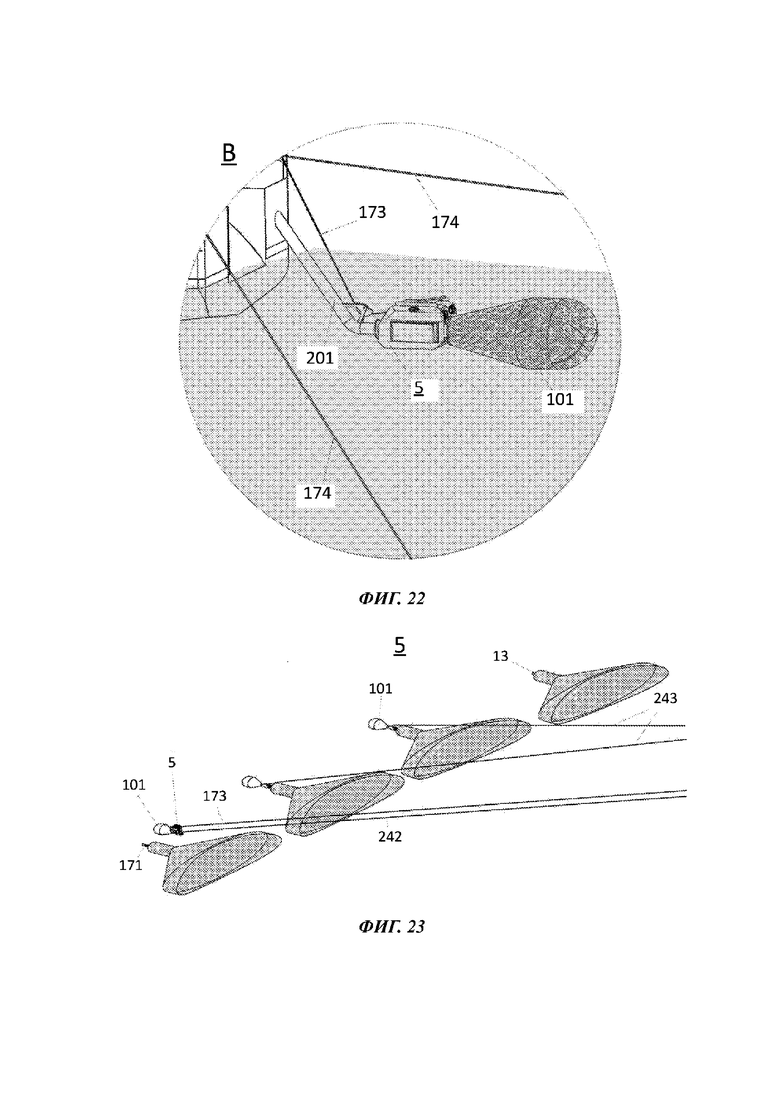
На фиг. 22 представлена часть В системы 3 сбора улова с фиг. 21, содержащая транспортировочный беспилотный аппарат 107 и транспортировочный контейнер 101, соединенный с точкой 201 выгрузки на траулере 10 при помощи соединительного устройства, расположенного между точкой выгрузки и транспортировочным контейнером 101.
На фиг. 23 представлен трал 11, система 4 транспортирования улова, а также транспортировочный контейнер 101, содержащий соединительное устройство, в разных ситуациях, при этом транспортировочный контейнер 101 с соединительным устройством в двух примерах показан соединенным с кутками.
На фиг. 24 представлена система транспортирования улова, содержащая транспортировочный беспилотный аппарат 107, соединенный с транспортировочным узлом 251, который, в свою очередь, соединен с транспортировочным контейнером 101, при этом транспортировочный узел служит в качестве соединительного устройства для транспортировочного контейнера 101, а система транспортирования улова находится в процессе соединения с тралом при помощи переходного устройства 171 кутка, установленного на кутке 13 трала 11.
На фиг. 25 представлен трал с системой транспортирования улова и транспортной системой в различных конфигурациях.
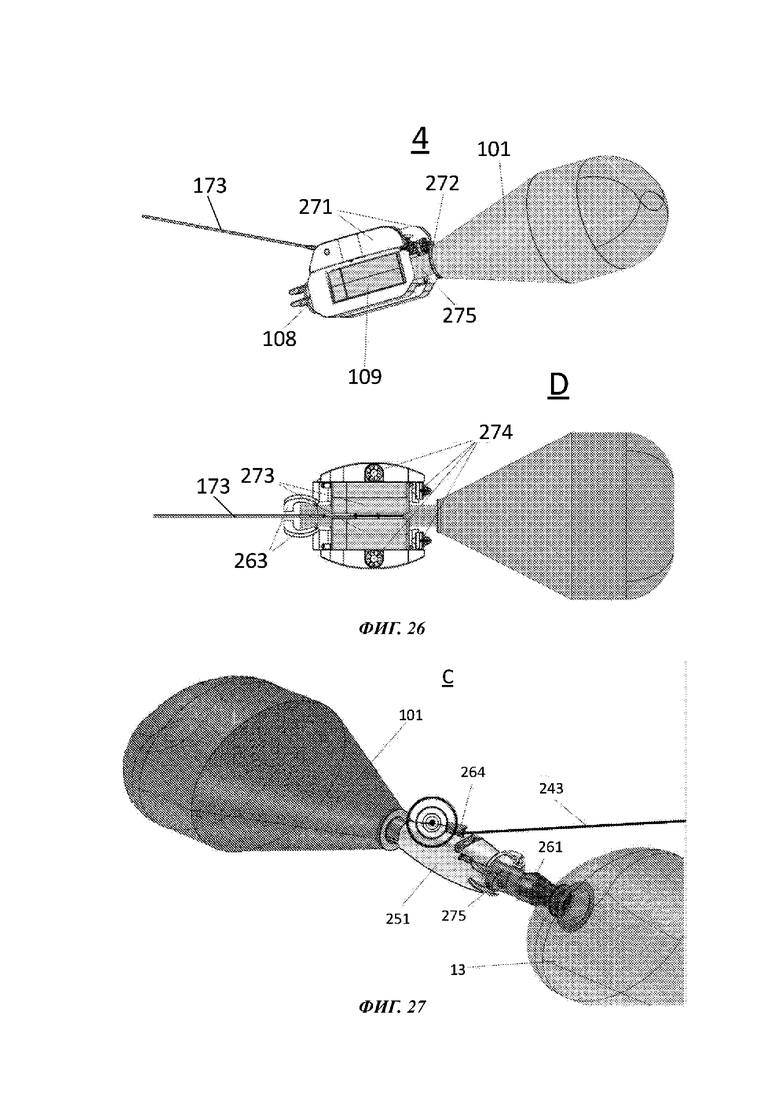
На фиг. 26 представлена система 4 транспортирования улова из части D с фиг. 25.
На фиг. 27 представлен транспортировочный контейнер 101, соединенный с кутком 13 при помощи транспортировочного узла 251, который служит в качестве соединительного устройства между транспортировочным контейнером 101 и кутком 13.
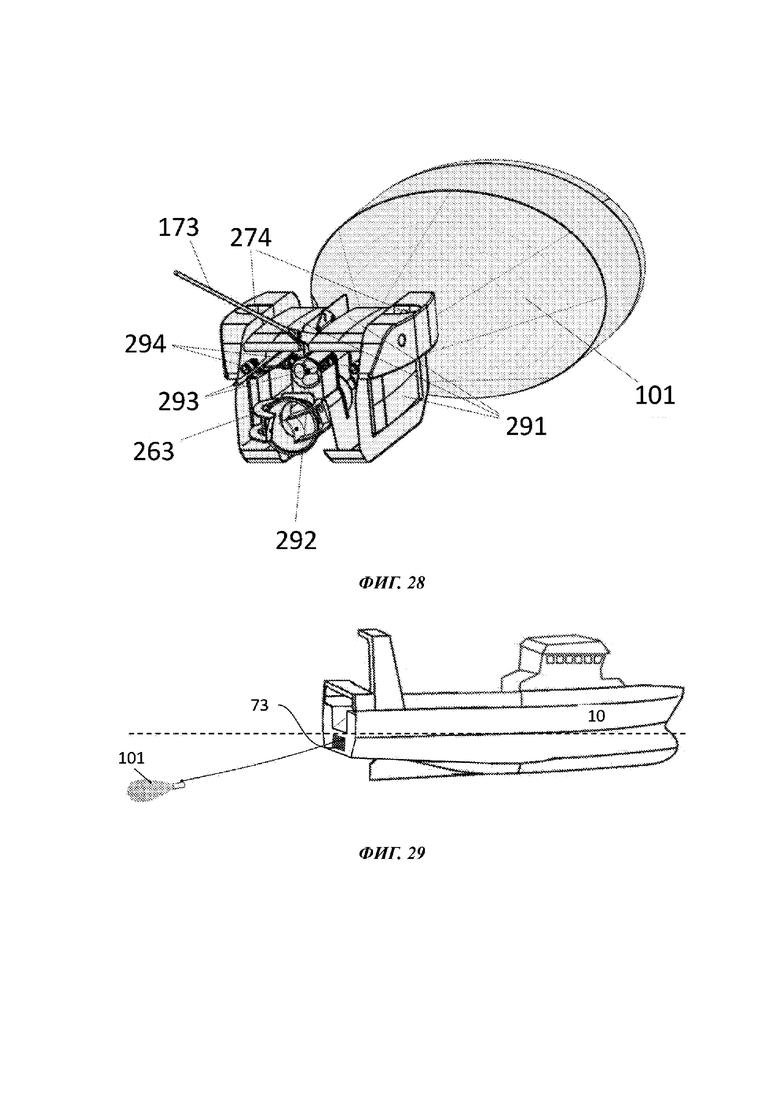
На фиг. 28 представлена система 4 транспортирования улова.
На фиг. 29 представлен ангар для приема транспортировочного узла 251 и транспортировочного контейнера 101, содержащего улов, полученный из активного трала.
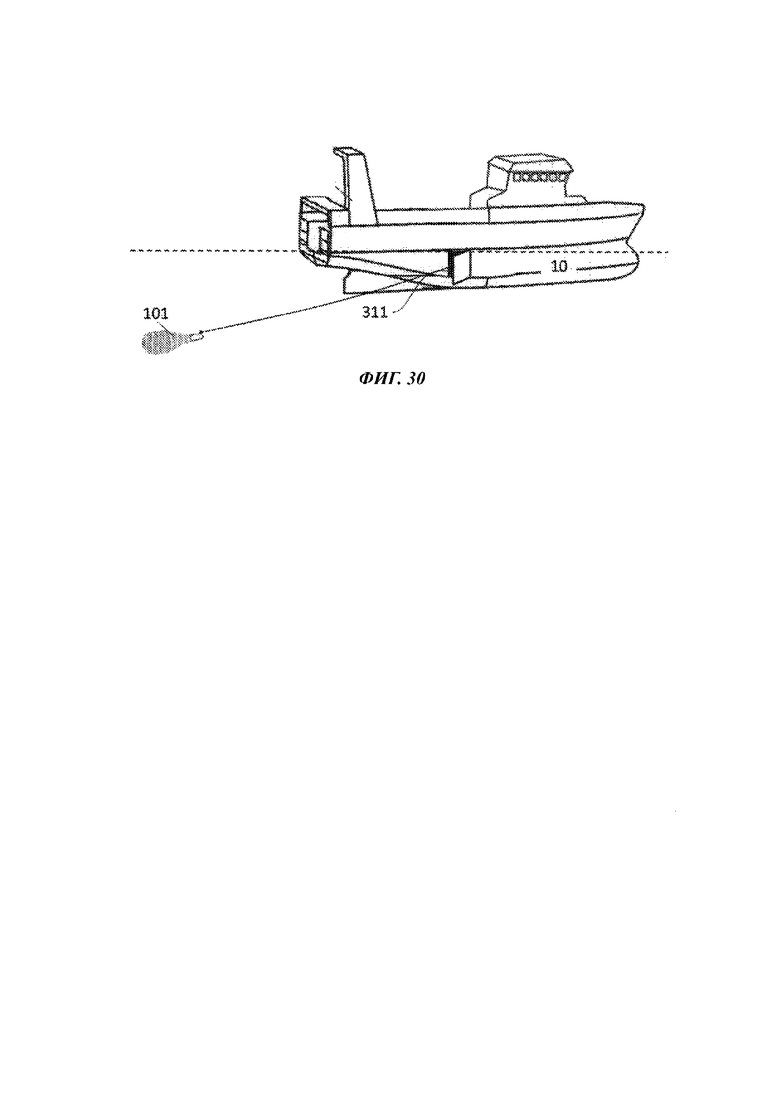
На фиг. 30 представлено обратное буксирование транспортировочного узла 251 с транспортировочным контейнером 101 при помощи троса к судну 10 и, в конечном счете, прием на судно через бортовой люк 311, расположенный ниже ватерлинии.
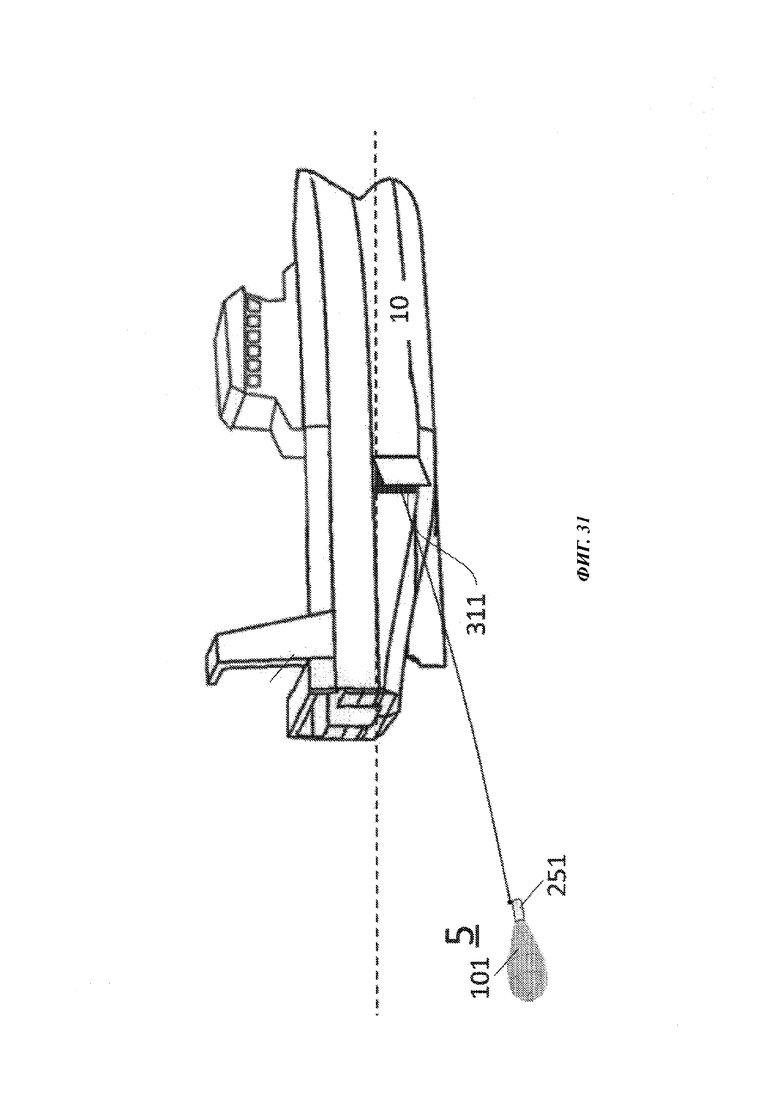
На фиг. 31 представлена система 4 транспортирования улова, содержащая модули для транспортировки, выгрузки и погрузки улова.
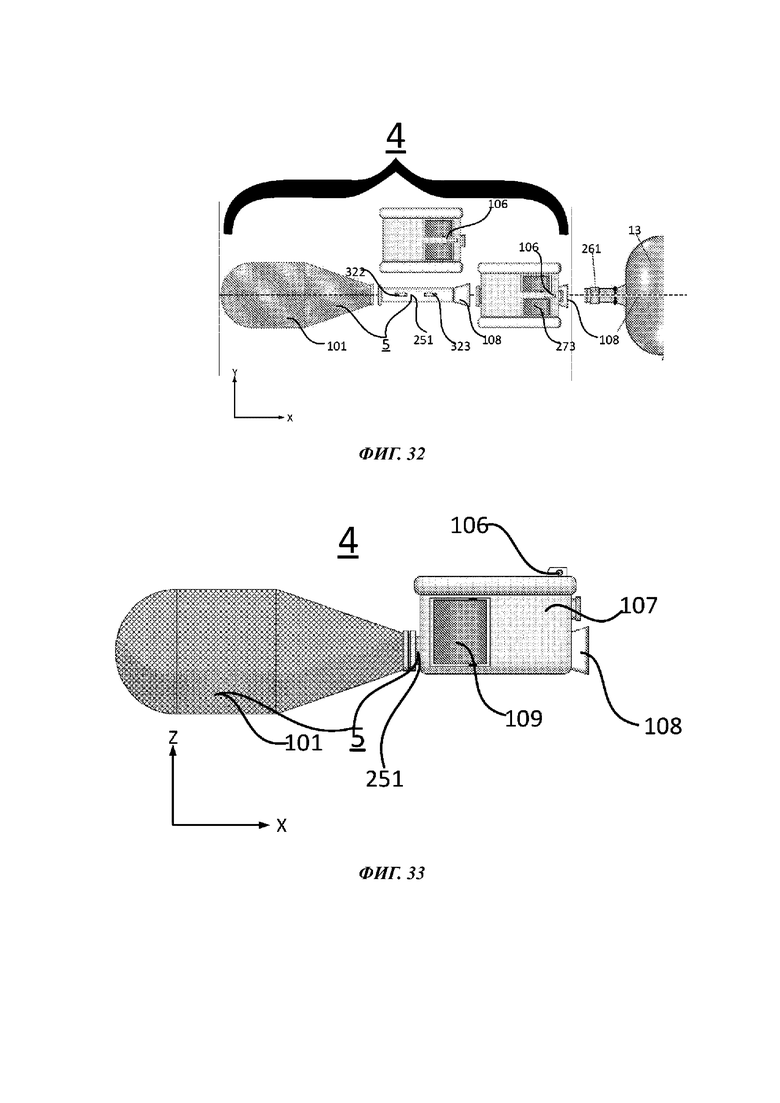
На фиг. 32 представлен вид сверху системы 4 транспортирования улова с фиг. 31 содержащей модули для транспортировки, выгрузки и погрузки улова.
На фиг. 33 представлен вид сбоку системы 4 транспортирования улова в соединенном состоянии.
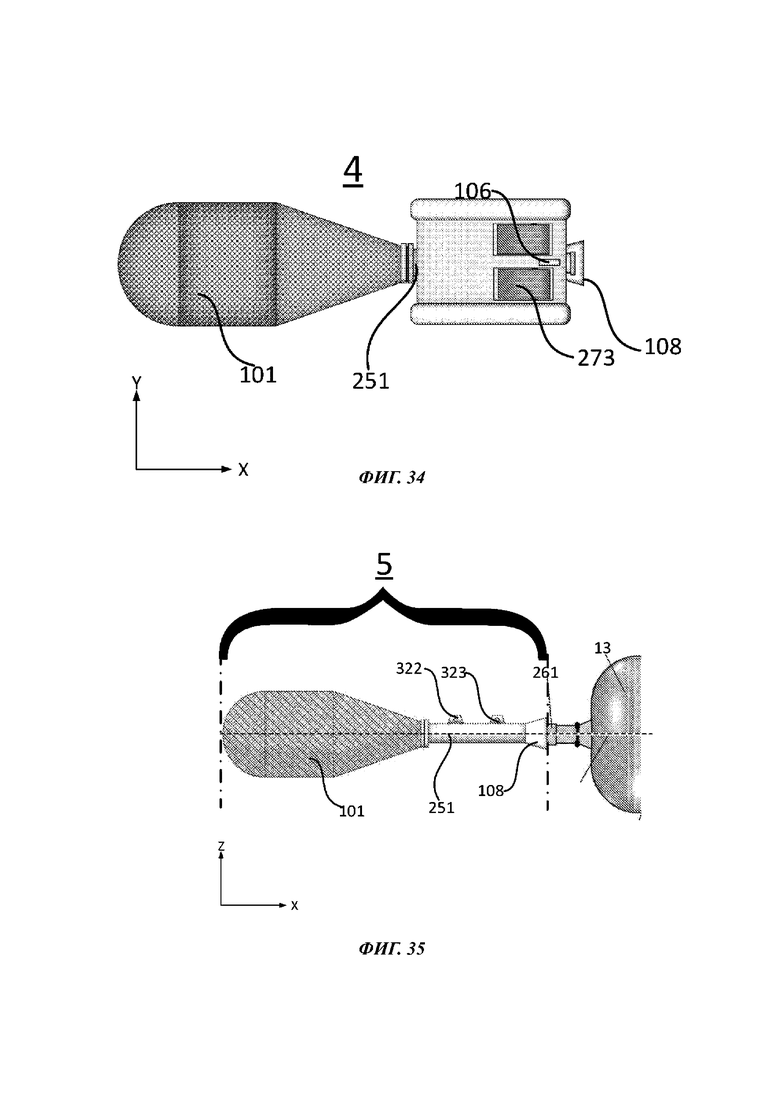
На фиг. 34 представлен вид сверху системы 4 транспортирования улова в соединенном состоянии.
На фиг. 35 представлена транспортная система 5, содержащая транспортировочный узел 251 с транспортировочным контейнером 101, соединенным с кутком 13.
Осуществление изобретения
Ниже приведено более подробное описание настоящего изобретения со ссылками на прилагаемые чертежи.
Термины, неоднократно используемые в заявке на патент:
a) Улов - означает живые и мертвые объекты, добываемые при помощи промыслового оборудования, добычу которых может осуществлять и, по возможности, обрабатывать рыбопромысловый флот 1 согласно настоящему изобретению. Обычно улов может состоять из рыбы, морских животных и отходов, добываемых при помощи трала.
b) Флот - в данной заявке относится к двум или более судам, действующим совместно для решения общей задачи, в частности, для сбора и обработки улова.
c) Термины линь, трос, проволочный канат или веревочный канат используются в описании как взаимозаменяемые. При этом следует понимать, что линь, трос, проволочный канат или веревочный канат могут выполнять функцию силового и/или сигнального троса.
Настоящее изобретение раскрывает рыбопромысловый флот 1, содержащий одну или более систем 2 обработки улова. Каждая система 2 обработки улова может включать в себя одну или более систем 3 сбора улова и один или более накопительных контейнеров 91. Системы сбора улова, в свою очередь, включают в себя одну или более систем транспортирования улова и одно или более траловых судов. Системы транспортирования улова могут состоять из одной или более транспортных систем 5 и одного или более транспортировочных беспилотных аппаратов 107. Каждая транспортная система 5 включает в себя по меньшей мере один транспортировочный узел 251 и один транспортировочный контейнер 101.
Таким образом, следует понимать, что настоящее изобретение относится к рыбопромысловому флоту в целом, со всеми индивидуальными элементами флота, позволяющими осуществлять сбор и обработку улова, фиг. 2 иллюстрирует рыбопромысловый флот 1 и его субэлементы в иерархическом порядке.
Иными словами, рыбопромысловый флот 1 содержит множество подсистем, каждая из которых содержит ряд модулей.
Задача рыбопромыслового флота 1 согласно настоящему изобретению заключается в том, чтобы обеспечивать автоматическую или полуавтоматическую обработку улова, транспортировку улова, а также погрузку и выгрузку улова.
Элементом рыбопромыслового флота 1 является транспортировочный беспилотный аппарат 107, который может быть полностью или частично автономным, и который, как "пчелка-труженица", осуществляет перевозки транспортной системы 5 и другого оборудования в рамках рыбопромыслового флота 1. Рыбопромысловый флот 1 может содержать несколько транспортировочных беспилотных аппаратов 107.
Ниже приведено более подробное описание отдельных элементов рыбопромыслового флота 1 со ссылками на прилагаемые чертежи в соответствующих случаях, чтобы облегчить понимание изобретения и всех его аспектов.
На фиг. 1 показано траловое судно 10 с тралом 11 и связанные с тралом устройства в соответствии с известным уровнем техники. Можно видеть, что траловое судно буксирует трал со стороны кормы, при этом буксирование осуществляется с использованием двух траловых досок 12. Наиболее важная функция траловых досок 12 состоит в сохранении трала 11 открытым, чтобы улов мог входить в трал, а затем в куток 13. Когда куток 13 будет заполнен, или, когда лицо, ответственное за траление, примет соответствующее решение, трал 11 подтягивается к судну 10 и поднимается на слип тралового судна 10. Улов обрабатывается на борту судна 10. После опорожнения трала 11, он снова может быть опущен через слип для продолжения ловли при условии, что трал не получил повреждений при извлечении.
На фиг. 3 показан иллюстративный пример рыбопромыслового флота 1, содержащего несколько судов. Траловое судно 10 производит траление совместно с траловым судном-близнецом 31. Траловое судно-близнец 31 может иметь дистанционное управление и представлять собой траловое судно-близнец без экипажа. Такое траловое судно-близнец может быть автономным, полуавтономным или, как указано выше, управление им может осуществляться с другого судна рыбопромыслового флота 1.
Рыбопромысловый флот 1 может также содержать одно или более судов 32 для приема улова. Разумеется, траловое судно 10 и/или траловое судно-близнец могут быть также оснащены устройствами для приема улова. Однако применение отдельного судна 32 для приема улова, в частности, рыбопромысловой плавучей базы, открывает особые преимущества для рыбопромыслового флота согласно настоящему изобретению, поскольку согласно настоящему изобретению отсутствует необходимость подъема тралов по мере их заполнения. Иными словами, согласно настоящему изобретению обеспечены устройства для опорожнения тралов через заслонку в задней части кутка, как видно в отверстии трала. Согласно настоящему изобретению одно или более отдельных судов 32 для приема улова могут курсировать между пунктом приема улова и рыбопромысловым флотом 1 для приема нового улова.
На фиг. 3 показано, что система 4 транспортирования улова буксируется судном 32 для приема улова. Система 4 транспортирования улова, показанная на фигуре, содержит транспортировочный контейнер 101, который может быть заполнен уловом. Система 4 транспортирования улова может быть направлена к тралу 33. Система 4 транспортирования улова может также осуществлять маневры относительно выходного конца кутка, содержащего переходное устройство кутка с открываемой и закрываемой заслонкой, автономно или при помощи буксирного линя с судна 32 в комбинации с устройством для маневрирования транспортного компонента системы 4 транспортирования улова. Детали системы транспортирования улова более подробно обсуждаются ниже. После направления системы транспортирования улова к отверстию, в частности, к заслонке на заднем конце соответствующего кутка, система 4 транспортирования улова или компонент системы транспортирования улова, который содержит транспортировочный контейнер, может быть механически соединен с выходным концом кутка, например, через разгрузочную заслонку - открываемую/закрываемую заслонку. На фиг. 3 показано семь тралов, шесть из которых снабжены транспортировочным контейнером, имеющим устройство для соединения с кутком, соединенное с кутком. Вышеуказанный транспортный компонент, образующий часть системы 4 транспортирования улова, может быть, например, отсоединен от транспортировочного контейнера после того, как транспортировочный контейнер, при помощи его соединительного устройства будет соединен с выходным концом кутка. Затем транспортный компонент может быть направлен к определенным куткам для отсоединения транспортировочных контейнеров, содержащих улов, от их соответствующих кутков и после этого может транспортировать их к судну 32 для приема улова. В качестве альтернативы транспортировочные контейнеры с соединительным устройством или без такового могут быть подтянуты при помощи линя непосредственно к судну 32 для приема улова. Указанный линь может быть соединен с транспортировочным контейнером при помощи транспортного компонента и может оставаться соединенным во время соединения транспортировочного контейнера с кутком.
На фиг. 4 показан вариант осуществления рыбопромыслового флота 1, содержащего, как видно на фиг. 4, устройство для работы с системой 4 транспортирования улова, которое не является частью рыбопромыслового флота, показанного на фиг. 3, при этом указанное устройство соединено с носовой частью судна 32 для приема улова. Как и на фиг. 3, трал 33, содержащий переходное устройство кутка, готов к соединению с системой 4 транспортирования улова.
Транспортировочный контейнер 101 при помощи буксирного линя 42 буксируется за судном 32 для приема улова. Буксирный линь 42 показан соединенным с двумя лебедками 43, установленными по одной на каждой стороне кормы. Комбинация буксирного линя 42 и двух лебедок позволяет поочередно подтягивать транспортировочный контейнер 101 к правой и левой сторонам. Возможно также применение более сложных систем лебедок, при этом транспортировочные контейнеры могут направляться, например, в люки, предусмотренные в правом или левом борту судна.
Суда 10, 31 и 32, показанные на фиг. 4, могут быть полностью или частично автономными, как указано для фиг. 3. Кроме того, показанное судно для приема улова может представлять собой иллюстративный пример из множества судов для приема улова, курсирующих для забора улова.
На фиг. 5 показан еще один иллюстративный пример рыбопромыслового флота 1, содержащего кольцевой строп для обеспечения маневрирования системы 4 транспортирования улова. Рыбопромысловый флот содержит траловое судно 10, а также траловое судно-близнец 31. Траловое судно-близнец может иметь дистанционное управление с тралового судна 10, может иметь экипаж на борту или может быть автономным так же, как обсуждалось для других вариантов осуществления рыбопромыслового флота 1.
Рыбопромысловый флот 1, показанный на фиг. 5, содержит четыре трала, в которых один из кутков не соединен с транспортировочным контейнером при помощи соединительного устройства. Третий трал с левой стороны ожидает систему транспортирования улова, содержащую транспортировочный контейнер с соединительным устройством для соединения с кутком.
Траловое судно 10 снабжено лебедкой 51, как и траловое судно-близнец 31, при этом лебедки 51 тянут кольцевой строп 53, на котором установлен направляющий блок 52 для позиционирования системы 4 транспортирования улова между тралами рыбопромыслового флота 1, показанного на фиг. 5. Лебедка 54, установленная в данном случае в носовой части тралового судна 10, может перемещать систему транспортирования улова "внутрь и наружу", иными словами, назад и вперед между судами 10, 31, показанными на фигуре, в то время как кольцевой строп и направляющий блок 52 регулируют позиционирование между тралами.
На фиг. 6 показан рыбопромысловый флот 1, который с конструктивной точки зрения аналогичен показанному на фиг. 5. фиг. 6 отличается от фиг. 5 тем, что система снабжена датчиками, устройствами связи и/или системами камер. В одном примере рыбопромысловый флот 1 с фиг. 6 снабжен камерами или системами камер 61, 62, 63 и 64. Система 4 транспортирования улова может быть снабжена высокоскоростным маршрутизатором 65 беспроводной сети или маршрутизатором 65 проводной сети. Один или более проводных маршрутизаторов могут быть соединены при помощи линий/кабелей, показанных на фигуре. Сетевой маршрутизатор 65 может представлять собой Ethernet-маршрутизатор.
Двухсторонняя связь с "транспортным компонентом" системы 4 транспортирования улова может также осуществляться на основе акустической связи.
Системы, аналогичные показанной на фиг. 6, могут быть скомбинированы с системами датчиков и дополнительными системами камер, имеющими связь с командами на судах рыбопромыслового флота 1 или с береговым персоналом. Камеры могут, например, показывать уровень заполнения тралов, могут передавать информацию о состоянии тралов и кутков, а также других частей рыбопромыслового флота 1, отслеживаемых камерами.
Рыбопромысловый флот 1, показанный на фиг. 3-4, также может быть оснащен комбинацией устройств связи и систем камер согласно фиг. 6.
На фиг. 7 показан рыболовный трал 72. Рыболовный трал 72 может быть выпущен за траловым судном 10 через слип 73 или через траловый ангар, расположенный ниже ватерлинии (не показан на фиг. 7). Кроме самого мини-трала 72 комплект для буксирования может также включать две малые траловые доски 74 для открытия и закрытия трала 72 автономного сбора, узел 75 навигации и маневрирования, один или более траловых тросов 76 между траловыми досками 74 и узлом 75 навигации, а также один или более главных тросов 77, соединенных с траловым судном 10. Тросы 76, соединяющие узел 75 навигации с траловыми досками 74, могут наматываться и разматываться в узле 75 навигации, поэтому трал, либо разворачивается, как показано на фиг. 7, либо полностью или частично складывается, как показано на фиг. 8.
Таким же образом, как как указано выше для системы 4 транспортирования улова, содержащей транспортировочный контейнер, мини-трал 72 может быть использован для сбора улова из тралов и последующей доставки на судно рыбопромыслового флота 1.
Как показано на фиг. 7 и 8, главный трос 77, имеющий механическую связь с узлом 75 маневрирования, может позиционировать неразвернутый буксируемый трал (неразвернутый мини-трал 72) как показано на фиг. 8, за кутком 13 главного трала 11. Когда буксируемый трал займет требуемую позицию, узел 75 навигации может разматывать трос 76 траловых досок 74, чтобы обеспечить раскрытие мини-трала 72 (фиг. 7). На заднем конце кутка 13 предусмотрена открываемая/закрываемая заслонка. Эта открываемая/закрываемая заслонка может представлять собой разгрузочную заслонку 261 с акустическим управлением, которая обеспечивает разгрузку улова через указанный задний конец в ожидающий мини-трал 72 при подаче соответствующего сигнала судном 10.
На фиг. 9 показана система 2 обработки улова, содержащая накопительный контейнер 91. Накопительный контейнер 91 может быть использован для промежуточного хранения улова. В одном варианте осуществления улов собирается системой 4 транспортирования улова, содержащей транспортировочные контейнеры, после чего улов может быть перемещен из транспортировочных контейнеров в накопительные контейнеры 91, которые могут буксироваться за судном 10. Накопительные контейнеры 91 могут быть пригодной средой для хранения живого улова, перемещаемого из транспортировочных контейнеров. Согласно настоящему изобретению, как указано выше, можно гораздо лучше регулировать состояние улова и значительно повысить выход живого улова, добываемого рыбопромысловым флотом 1 согласно настоящему изобретению, по сравнению с традиционными траловыми системами (см. фиг. 1). Накопительные контейнеры 91 могут быть, разумеется, использованы также для промежуточного хранения отходов и других выловленных объектов, собираемых рыбопромысловым флотом 1. В одном варианте осуществления накопительные контейнеры 91 могут опорожняться, например, при помощи трубопроводного соединения с судном 10. На фиг. 9 показана система 2 обработки улова, которая может представлять собой одну из нескольких таких систем рыбопромыслового флота. На фиг. 9 показано траловое судно, которое буксирует, в частности, трал 11 с кутком, снабженным переходным устройством, предназначенным для опорожнения трала через это переходное устройство кутка и расположенным на закрытом выходном конце кутка.
При этом следует понимать, что накопительные контейнеры 91 могут быть оставлены рыбопромысловым флотом для буксирования/сбора судном, которое не обязательно принадлежит тому же самому флоту, что и накопительные контейнеры 91. Так, например, если в накопительном контейнере хранятся неживые объекты, в частности, отходы, то для сбора и обработки этих отходов может быть использовано, например, специальное мусороуборочное судно.
Аналогичным образом, накопительные контейнеры, содержащие живой улов, могут быть собраны судами, которые могут обеспечивать доставку живого улова в рыбоводческие хозяйства или в пункты приема живого улова.
Разумеется, рыбопромысловые флоты 1, показанные на фиг. 3-6, могут быть комбинированы с одним или более накопительными контейнерами 91.
На фиг. 10 показан блок накопительного контейнера 91 и системы 4 транспортирования улова. В иллюстративных целях показанный накопительный контейнер 91 снабжен окном, в котором изображен живой улов в виде рыбы 104. Аналогичное окно показано на фигуре в транспортировочном контейнере 101. Указанные окна представлены только в целях наглядности.
Накопительный контейнер 91 показан с трубопроводом 103, предназначенным для выгрузки/откачивания улова. Первый конец/горловина 105 трубопровода содержит переходное устройство, выполненное с возможностью соединения с разгрузочным устройством, в частности, с дополнительной трубой или шлангом системы, имеющими дополнительные соединительные элементы для разъемного соединения с горловиной 105 трубопровода 103 накопительного контейнера 91.
На фигуре показано, что накопительный контейнер 91 имеет сетчатую поверхность. Такая сетчатая поверхность иллюстрирует возможность использования наружного материала для контейнера, проницаемого для сквозного прохода жидкостей. Ширина отверстия/ячейки может быть определена в соответствии с требуемой функцией/типом улова. Чем больше отверстие, тем лучше происходит замена кислорода и жидкости, однако, с другой стороны, в случае большой ширины ячеек проток может почти не увеличиваться во время буксирования некоторых типов улова.
Накопительный контейнер 91 содержит устройство для заполнения контейнера 91. На фигуре это устройство показано в виде второй горловины 102. При этом, как показано на фигуре, транспортировочный контейнер 101 образует разъемное соединение со второй горловиной 102 для перегрузки улова 104, содержащегося в транспортировочном контейнере 101, в накопительный контейнер 91. Транспортировочный контейнер 101 снабжен закрывающим/открывающим устройством, расположенным на втором конце и выполненным с возможностью разъемного соединения со второй горловиной 102.
Накопительный контейнер на фигуре имеет удлиненную колбасообразную форму, однако, разумеется, возможны и другие формы.
Транспортировочный контейнер 101 имеет первый конец, выполненный с возможностью разъемного соединения с первым соединительным устройством, при этом соединенные друг с другом транспортировочный контейнер 101 и первое соединительное устройство совместно образуют блок, называемый транспортной системой 5. Первое соединительное устройство обеспечивает разъемное соединение на первом выходном конце кутка 101 и в то же время - разъемное соединение с системами выгрузки и кутками через третью горловину/переходное устройство 108. При этом показанный транспортировочный беспилотный аппарат 107 может быть снабжен устройством для обеспечения разъемного соединения с первым соединительным устройством.
Транспортировочный беспилотный аппарат 107 показан на фигуре, окруженным первым соединительным устройством. Первое соединительное устройство обсуждается более подробно в приведенном ниже описании для более конкретного варианта реализации.
Транспортировочный беспилотный аппарат 107, показанный на фигуре, имеет крепежное средство в виде крепежной проушины 106. Одно или более таких крепежных средств могут быть предусмотрены на транспортировочном беспилотном аппарате 107, чтобы механически соединять транспортировочный беспилотный аппарат 107 с удаленными устройствами при помощи линя, троса, проволочного каната или веревочного каната. В одном варианте реализации транспортировочного беспилотного аппарата 107 электрический силовой и сигнальный кабель могут быть присоединены при помощи указанного крепежного средства 106. Как показано на фигуре, транспортировочный беспилотный аппарат снабжен устройством 109 для навигации. На фигуре устройство для навигации показано в виде бокового руля 109, однако, возможны и другие варианты осуществления устройства для навигации, в частности, в виде винторулевых колонок или гребных винтов.
Согласно одному варианту осуществления система 4 транспортирования улова и накопительный контейнер 91 могут транспортироваться в виде единого блока. Однако во многих случаях транспортировочный беспилотный аппарат 107 не используется, поэтому остается блок, содержащий транспортную систему 5 и накопительный контейнер 91.
На фиг. 11 показан колбасообразный накопительный контейнер 91 имеющий сетчатую поверхность, аналогичную показанной на фиг. 10. Сетчатая поверхность представляет собой поверхность, пропускающую жидкость. В верхней части фиг. 11 показан вид сбоку накопительного контейнера в проекции на плоскость x-z (сравните с фиг. 10). В нижней части фигуры показан вид сверху колбасообразного накопительного контейнера 91 в проекции на плоскость х-у.
На фиг. 11 показана первая горловина 105, а на верхней фигуре показана также вторая горловина 102.
Фиг. 12 аналогична фиг. 11 за исключением того, что накопительный контейнер 91 на фиг. 12 показан с поверхностью, не пропускающей жидкость. Такой непроницаемый для жидкостей контейнер 91 эффективно изолирует улов, содержащийся внутри накопительного контейнера, от окружающей среды. Указанный улов может представлять собой неживые объекты и/или живые объекты, при этом указанные неживые объекты могут также включать в себя жидкости.
На фиг. 11 и 12 показаны накопительные контейнеры, имеющие непроницаемую для жидкостей или открытую поверхность в качестве иллюстрации возможностей адаптации поверхности накопительного контейнера 91. Эта поверхность может представлять собой комбинацию поверхности, непроницаемой для жидкостей, и сетчатой поверхности, при этом поверхность, непроницаемая для жидкостей, может быть предусмотрена, например, на концах, а проницаемая для жидкостей поверхность - в центральной части.
На фиг. 13 показан накопительный контейнер 91 без всех деталей, показанных на фиг. 10-12. Накопительный контейнер может иметь поверхность, показанную на фиг. 10-12. Накопительный контейнер 91, показанный на фигуре, снабжен буксирным устройством 92. Буксирное устройство 92 может представлять собой проволочный канат, трос, линь или веревочный канат и может содержать кабель тока и сигнальный кабель. Кабель тока и сигнальный кабель могут использоваться, например, для управления открываемыми и закрываемыми заслонками в соединении с горловинами накопительного контейнера 91.
Фиг. 14, в целом, аналогична фиг. 13, однако, в этом случае накопительный контейнер показан с поверхностью выполненной с возможностью пропускания жидкости. На фигуре показан также шланг 146, направленный к трубопроводу 103 накопительного контейнера 91 для соединения с этим трубопроводом при помощи первой горловины 105 (не показана на фиг. 14). Шланг 146 может также представлять собой трубу.
На фиг. 15 показано, что шланг/труба 146 соединены с первой горловиной 105 трубопровода 103 накопительного контейнера 91.
Для наглядности на сетчатой поверхности накопительного контейнера 91 показано окно, изображающее улов 104 в виде живой рабы, однако, при этом улов не ограничивается живой рыбой. Кроме того, поверхность накопительного контейнера 91 может также представлять собой поверхность, непроницаемую для жидкостей, или комбинацию поверхности, непроницаемый для жидкостей, и сетчатой/перфорированной поверхности.
На фигуре показано, что улов 104 выкачивается из накопительного контейнера 91 по трубопроводу 103 в трубу/шланг 146, при этом улов обозначен ссылочным номером 157. Улов 104, 157 закачивается в хранилище/резервуар/садок, где улов может быть обработан, в частности, в депо, на траловом судне, на рыбопромысловой плавучей базе, на обрабатывающей станции, в садке или в любом другом пригодном пункте приема.
Как указано выше, природа улова определяет выбор приемного пункта улова 104, 157, выкачиваемого из накопительного контейнера 91. Устройство перекачивания обычно устанавливается в приемном пункте.
На фиг. 16 показана система 3 сбора улова, содержащая систему 4 транспортирования улова, которая имеет физическое соединение 173 с депо 10, представляющее собой в показанном примере траловое судно 10. На фигуре показан также трал 11, имеющий куток 13. Куток 13 снабжен задней горловиной 211 в виде переходного устройства кутка для разъемного механического соединения с соединительным устройством системы 4 транспортирования улова. Система 4 транспортирования улова содержит автономный и/или управляемый транспортировочный беспилотный аппарат 107. Транспортировочный беспилотный аппарат 107 вместе с соединительным устройством и транспортировочным контейнером буксируется при помощи зондового кабеля 173. Транспортировочный беспилотный аппарат 107 позиционируется примерно за главным тралом 11 на основании данных о местоположении, полученных от датчиков, которые установлены на трале 11. После примерного позиционирования транспортировочный беспилотный аппарат 107 может активировать гидролокационный аппарат 172, например, многолучевой гидролокатор, чтобы установить местонахождение и идентифицировать гидроакустический маяк 171, соединенный с переходным устройством 211 кутка. После идентификации маяка может быть использован непрерывный запрос гидролокационных данных для позиционирования транспортировочного беспилотного аппарата 107 с целью постепенного сближения с переходным устройством 211 кутка до тех пор, пока не будет достигнута возможность их физического соединения. При этом следует понимать, что указание о маневрировании транспортировочного беспилотного аппарата для соединения переходным устройством 211 кутка подразумевает, что транспортировочный беспилотный аппарат в данном случае содержит полезную нагрузку в виде соединительного устройства и транспортировочного контейнера, которые совместно образуют систему 4 транспортирования улова.
На фиг. 17 показана та же самая система 3 сбора улова, что и на фиг. 16, однако, система 4 транспортирования улова находится в другой позиции относительно трала 11. На фигуре показано, что система 4 транспортирования улова, содержащая транспортировочный беспилотный аппарат 107, перемещается к депо 10. Гидролокационный аппарат 172 активно используется, чтобы избегать препятствий в море, в частности, тралового троса 173, и предотвращать столкновение с депо 10.
На фигуре можно видеть, что система 4 транспортирования улова содержит транспортировочный контейнер 101 и транспортировочный беспилотный аппарат 107. Транспортировочный беспилотный аппарат 107 охватывает кругом первое соединительное устройство, которое, в свою очередь, соединено с возможностью отсоединения с транспортировочным контейнером 101. Первое соединительное устройство не показано на фигуре.
На фигуре показан также трал 11, содержащий траловые доски 12, предназначенные для того, чтобы управлять направлением движения, открывать и закрывать трал 11. Кроме того, трал 11 снабжен кутком 13. На закрытом конце кутка 13 предусмотрено переходное устройство 211 кутка, выполненное с возможностью разъемного соединения с первым соединительным устройством.
На фигуре показаны также буксирные устройства в виде проволочных канатов/линей /веревочных канатов/тросов. Буксирное устройство 173 соединено между судном 10 и системами 4 транспортирования уловов. Буксирное устройство может представлять собой полностью пассивный линь, веревочный канат, проволочный канат или комбинацию электрического силового и сигнального кабеля и буксирного средства 173. На фигуре показано также, что трал 11 через его траловые доски 12 снабжен буксирным устройством 174.
На фиг. 18, аналогичной фиг. 16 и 17, показана система 3 сбора улова, содержащая те же самые элементы. На фигуре показано, что система 4 транспортирования улова с транспортировочным беспилотным аппаратом 107 может при помощи активного гидролокационного аппарата 172 безопасно перемещаться вперед из задней позиции, показанной на фиг. 16, через главный трал 11 в позицию перед тралом 11 между траловыми тросами 173.
На фиг. 16-18 показана система 4 транспортирования улова, которая является выбираемой. Во многих случаях транспортировочный беспилотный аппарат 107 не участвует в этой выборке, поскольку транспортировочный беспилотный аппарат 107, который может быть единственным транспортировочным беспилотным аппаратом рыбопромыслового флота, может иметь лучшее применение, чем быть "пассажиром" в транспортной системе 5.
В варианте осуществления, описанном выше со ссылками на фиг. 16-19, показана выборка улова. Однако применение системы 4 транспортирования улова с беспилотным аппаратом 107 является по меньшей мере столь же реальным, поскольку маневровые характеристики транспортировочного беспилотного аппарата 107 могут при этом использоваться в большей степени, чем в случае выборки. Для такого варианта осуществления на фиг. 16-18 показан автономный и/или управляемый транспортировочный беспилотный аппарат 107, запущенный за депо/судном 10 и буксируемый при помощи зондового кабеля 173. Транспортировочный беспилотный аппарат охватывает кругом первое соединительное устройство, которое, в свою очередь, соединено с возможностью отсоединения с транспортировочным контейнером 101. Транспортировочный беспилотный аппарат 107 с транспортировочным контейнером и соединенным первым соединительным устройством позиционируется примерно за тралом 11 на основании данных о местоположении, полученных от датчиков, которые установлены на трале 11. Затем транспортировочный беспилотный аппарат 107 может активировать многолучевой гидролокатор 172, чтобы установить местонахождение и идентифицировать гидроакустический маяк 171, соединенный с переходным устройством/горловиной 211 кутка. После идентификации маяка используется непрерывный запрос гидролокационных данных для позиционирования транспортировочного беспилотного аппарата 107 с целью постепенного сближения с переходным устройством/горловиной 211 кутка до тех пор, пока не будет достигнута возможность их физического соединения.
На фиг. 19, аналогичной фиг. 16-18, показана система 3 сбора улова, содержащая те же самые элементы за исключением того, что в данном случае депо 10 снабжено трубой 201 для приема улова. На этой фигуре система 4 транспортирования улова соединена с кутком 13 при помощи переходного устройства кутка. В депо 10 показана лебедка 54, предназначенная, например, для подъема и развертывания системы 4 транспортирования улова.
На фиг. 20 показана часть А с фиг. 19. Система 4 транспортирования улова показана соединенной с кутком 13 при помощи горловины 211 кутка. На фигуре можно видеть, что транспортировочный беспилотный аппарат 107 механически соединен с депо/судном 10 при помощи линя 173, см. также, фиг. 19. Транспортировочный беспилотный аппарат 107 может быть отсоединен от транспортной системы 5 для выполнения дополнительных задач в рыбопромысловом флоте 1. Линь 173, выходящий из депо/судна 10 может быть использован для подтягивания и оттягивания транспортировочного беспилотного аппарата.
Транспортная система 5 после соединения с кутком при помощи горловины 211 кутка является готовой к приему улова из кутка 13. Заслонка, предусмотренная в месте соединения кутка с горловиной, может открываться и закрываться для опорожнения кутка 13 по мере необходимости.
На фиг. 22 показана система 3 сбора улова, в которой система 4 транспортирования улова соединена с точкой 201 выгрузки. Точка выгрузки показана расположенной на судне 10, однако, в принципе, точка выгрузки может быть связана с любым депо 10, пригодным для приема улова от транспортировочного контейнера 101. Система 4 транспортирования улова может быть соединена с точкой 201 выгрузки таким же образом, как она соединена с кутком. Депо/судно 10 в конфигурации, показанной на фиг. 21, может быть снабжено насосом для откачивания улова из транспортировочного контейнера 101.
При необходимости транспортировочный беспилотный аппарат 107 может быть отсоединен от системы транспортирования для выполнения других задач.
На фигуре показана также лебедка 54, предназначенная для выборки и буксирования главного трала.
На фиг. 22 представлена часть В с фиг. 21, показывающая, что линь 173 соединен с транспортировочным беспилотным аппаратом 107, что позволяет депо/судну 10 подтягивать систему 4 транспортирования улова. Точка 201 выгрузки показана более наглядно в виде трубы. В других конфигурациях транспортировочный контейнер может втягиваться в траловый ангар для опорожнения.
На фиг. 3 показана система 4 транспортирования улова в различных ситуациях. В первой ситуации система транспортирования улова показана с двумя линями 173, 242, которые направлены к кутку, содержащему одну горловину 211 кутка. Линь/веревочный канат 242 является несущим веревочным канатом/линем транспортной системы 5. Линь/веревочный канат 242 может быть также заранее соединен с соединительным устройством, соединенным с транспортировочным контейнером 101 и выполненным с возможностью соединения с кутком 13 и с точкой 201 выгрузки. Веревочный канат/линь 242 позволяет подтягивать транспортную систему 5, даже если транспортировочный беспилотный аппарат 107 отсоединен от транспортной системы 5. При этом транспортировочный беспилотный аппарат 107 может быть доступен для выполнения других задач.
Вторая ситуация показана выше первой ситуации, рядом с ней. В этом случае транспортная система 5 показана соединенной с кутком, при этом транспортировочный беспилотный аппарат отсоединен. Веревочный канат/линь 243 соединен с транспортной системой 5, при этом указанный веревочный канат/линь 243 может соответствовать несущему веревочному канату/линю 242 системы 4 транспортирования улова, который, как можно видеть, соединен с транспортной системой 5. В следующей ситуации, второй справа на фиг. 23, показано, что транспортная система 5 готова к отсоединению от кутка для подтягивания. На крайнем правой фигуре показана ситуация, в которой транспортная система отсоединена от кутка 13.
На фиг. 24 подробно показана первая ситуации с фиг. 23. На фигуре наглядно показан куток с соединительными устройствами 211, 171 для соединения с транспортной системой. Соединительное устройство 251 для соединения с кутком 13 показано на фигуре в виде блока, отдельного от транспортировочного контейнера 101 и транспортировочного беспилотного аппарата 107. В одном варианте осуществления соединительное устройство 251 называется транспортировочным узлом 251. На фигуре показано, что линь 243 соединен с соединительным устройством 251, в то время как другой линь/веревочный канат 173 соединен с транспортировочным беспилотным аппаратом 107.
На фиг. 25 аналогично фиг. 23 показана система 4 транспортирования улова и транспортная система 5 в различных ситуациях. В нижней части фигуры, обозначенной литерой D, показана система 4 транспортирования улова в процессе соединения с кутком.
В соседней части фигуры, обозначенной литерой С, показано, что транспортная система 5 соединена с кутком. Транспортировочный беспилотный аппарат отсоединен от транспортной системы 5. Часть фиг. 25, обозначенная литерой С, показывает ряд деталей транспортной системы 5 и соседних с транспортной системой 5. Транспортировочный контейнер 101 показан соединенным с соединительным устройством. В этом случае соединительное устройство представлено транспортировочным узлом, содержащим несколько элементов. Ссылочным номером 262 обозначена точка присоединения линя 243. Захватное устройство 263, предназначенное для закрепления разъемного соединения с кутком, охватывает трубчатый корпус, выходящий из кутка 13. На фигуре показано также переходное устройство кутка с заслонкой 261, которая не показана подробно, однако, функционально служит для открытия и закрытия. В верхней части фигуры показан трал, при этом транспортная система 5 отсоединена от кутка 13.
На фиг. 26 часть D с фиг. 25 показана более подробно. Система 4 транспортирования улова показана с тремя ее отделяемыми элементами, а именно, с транспортировочным контейнером 101, транспортировочным беспилотным аппаратом 107 и компонентами транспортировочного узла, представленными, в частности, захватным устройством 263.
На фигуре показано также, что транспортировочный беспилотный аппарат 107 может быть снабжен устройствами 109, 274 для маневрирования. В данном случае указанные устройства для маневрирования представлены одним или двумя рулями 109, расположенными с одной стороны транспортировочного беспилотного аппарата 107. Соответствующие рули предусмотрены также на противоположной стороне транспортировочного беспилотного аппарата 107. Кроме того, показаны навигационные и движительные устройства 274 в виде четырех движителей, два из которых используются для обеспечения движения в направлении, по существу, горизонтальном/параллельном или частично параллельном линю 173. Два остальных движителя предназначены для вертикального перемещения, иными словами, для подъема и погружения транспортировочного беспилотного аппарата 107. На фигуре показано также устройство маневрирования в виде двух установленных сверху рулей, хотя может быть достаточным и одного руля, установленного сверху. Установленный сверху руль может служить в качестве вспомогательного устройства для обеспечения навигации/маневрирования транспортировочного беспилотного аппарата 107 в вертикальном направлении.
На фиг. 27 показаны детали части С с фиг. 25. На фигуре можно видеть, что транспортировочный беспилотный аппарат 107 отсоединен от транспортной системы 5. На фигуре показаны также детали переходного устройства 275/171 кутка, выступающего из кутка 13. Переходное устройство 275/171 кутка выполнено с возможностью соединения с соединительным устройством. На фигуре указанное соединительное устройство представлено в виде транспортировочного узла 251. Транспортировочный узел 251, который в данном примере соединен с транспортировочным контейнером, выполнен с возможностью соединения с переходным устройством 275/171 кутка. Транспортировочный узел содержит устройство для такого соединения, представленное в данном случае захватным фиксатором для переходного устройства 275/171 кутка. Приводные механизмы, расположенные на транспортировочном узле 251, осуществляют дистанционное управление захватным фиксатором. Дистанционное управление самим транспортировочным узлом 251 осуществляется при помощи кабеля 243. Гидролокационная связь может быть использована для управления приводными механизмами, которые обеспечивают сцепление транспортировочного узла с переходным устройством 275 кутка во время стыковки и вместе с тем оставляют его управляемым, чтобы приводить в действие заслонку 261 для улова в переходном устройстве 275/171 кутка.
На фигуре гидролокационный аппарат транспортировочного узла 251 показан в виде четырех кругов и центральной точки.
Транспортировочный узел дополнительно содержит соединительное устройство для соединения с транспортировочным беспилотным аппаратом, которое показано в виде точки 264 соединения.
На фиг. 28 показана система 4 транспортирования улова, содержащая спереди транспортировочный беспилотный аппарат, а сзади -транспортировочный контейнер 101. На фигуре показаны, по существу, те же самые элементы, что и на фиг. 26. Система 4 транспортирования улова показана стремя разъемными элементами, а именно, с транспортировочным контейнером 101, транспортировочным беспилотным аппаратом 107 и компонентами транспортировочного узла, представленными, в частности, захватным устройством 263.
На фигуре показано также, что транспортировочный беспилотный аппарат может быть снабжен устройствами 274, 291, 293, 294 для маневрирования. На фигуре указанные устройства для маневрирования представлены одним или двумя рулями 291, расположенными на обеих сторонах транспортировочного беспилотного аппарата 107, а также по меньшей мере одним "верхним рулем", расположенным в верхней части транспортировочного беспилотного аппарата. Кроме того, можно видеть навигационные и движительные устройства 274 в виде двух движителей, которые предназначены для вертикального и, по существу, вертикального перемещения, иными словами, для подъема и погружения транспортировочного беспилотного аппарата 107. На фигуре показано также, что транспортировочный беспилотный аппарат снабжен камерой 293, в частности, камерой технического зрения. При этом показано, что транспортировочный беспилотный аппарат содержит две камеры 293 и два источника 294 освещения. Транспортировочный беспилотный аппарат может быть снабжен генератором 292 для зарядки внутренних батарей.
На фиг. 29 показан иллюстративный пример выборки улова, при этом транспортная система 5, содержащая транспортировочный контейнер 101 с уловом, подтягивается к слипу 73 или к траловому ангару судна 10.
На фиг. 30 показан иллюстративный пример выборки улова, при этом транспортная система 5, содержащая транспортировочный контейнер 101 с уловом, подтягивается к траловому ангару 311 с люком, выполненным в борту судна 10.
Возможно выполнение люков тралового ангара в обоих бортах судна, а также наличие кормового слипа и одного или двух люков для тралового ангара.
Фиг. 31 показан иллюстративный пример системы 4 транспортирования улова в разобранном виде, состоящей из трех основных элементов, а именно, из транспортировочного контейнера 101, транспортировочного узла 251 и транспортировочного беспилотного аппарата 107. Все эти элементы показаны на виде сбоку.
На этом чертеже транспортировочный контейнер 101 не показан с видимым переходным устройством транспортировочного узла. Тем не менее, транспортировочный контейнер 101 снабжен устройством, позволяющим осуществлять его разъемное соединение с транспортировочным узлом 251.
Транспортировочный узел 251 содержит первую заднюю крепежную проушину 322 и вторую переднюю крепежную проушину 323. Указанные крепежные проушины выполнены с возможностью присоединения веревочного каната/линя, троса или т.п.Крепежные проушины 322, 323 являются иллюстративным примером устройства для физического соединения транспортировочного узла с удаленными устройствами, в частности, с лебедками депо и т.п. Транспортировочный узел снабжен устройством для соединения с кутком, при этом указанное устройство 108 показано в виде горловины, выполненной с возможностью соединения с кутком или с трубой 201 для приема улова.
На фигуре показан транспортировочный беспилотный аппарат 107, содержащий боковой руль 109. Задняя часть транспортировочного беспилотного аппарата 107 соответствует показанной боковой части и также снабжена боковым рулем 109. Транспортировочный беспилотный аппарат 107 снабжен также крепежным устройством 106 для разъемного соединения с удаленными устройствами. На фигуре, крепежное устройство 106 показано в виде а крепежной проушины 106.
Элементы, показанные на фигуре слева направо в направлении х, представляют собой: транспортировочный контейнер 101, транспортировочный узел 251, показанный ниже транспортировочного беспилотного аппарата 107, и транспортировочный беспилотный аппарат 107, несущий транспортировочный узел. Куток, содержащий переходное устройство кутка, которое не образует часть системы транспортирования улова, показан справа от транспортировочного беспилотного аппарата с транспортировочным узлом.
На фиг. 32 показаны те же самые элементы, что и фиг. 31, не виде сверху. На фигуре можно видеть, что транспортировочный беспилотный аппарат 107 снабжен двумя верхними рулями 273. Остальные элементы и конструктивные особенности соответствуют фиг. 31.
На фиг. 33 показана транспортная система 5 согласно одному варианту осуществления изобретения. Транспортная система 5 содержит те же самые элементы, которые показаны на фиг. 31 и 32, представленные в данном случае в сборе на виде сбоку.
На фиг. 34 показана система транспортирования улова с фиг. 33 на виде сверху.
На фиг. 35 показана транспортная система 5, соединенная с кутком. На фигуре присутствуют те же самые элементы, которые показаны на фиг. 31, за исключением транспортировочного беспилотного аппарата 107.




Настоящее изобретение относится к рыбопромысловому флоту, содержащему устройства для сбора, транспортировки и переработки улова. Система обработки улова содержит по меньшей мере одну систему (3) сбора улова, содержащую одно депо (10) для обработки улова, один или более тралов (11) и по меньшей мере одну систему (4) транспортирования улова. При этом указанная система (4) транспортирования улова содержит по меньшей мере транспортную систему (5), которая содержит по меньшей мере транспортировочный контейнер (101) и транспортировочный узел (251), содержащий устройство (264) для разъемного соединения с транспортировочным беспилотным аппаратом (107) рыбопромыслового флота и устройство для соединения с одним или более устройствами рыбопромыслового флота. Технический результат заключается в увеличении количества подъемов уловов рыбы и исключении нежелательного длительного времени работы при отсутствии лова рыбы. 11 з.п. ф-лы, 35 ил.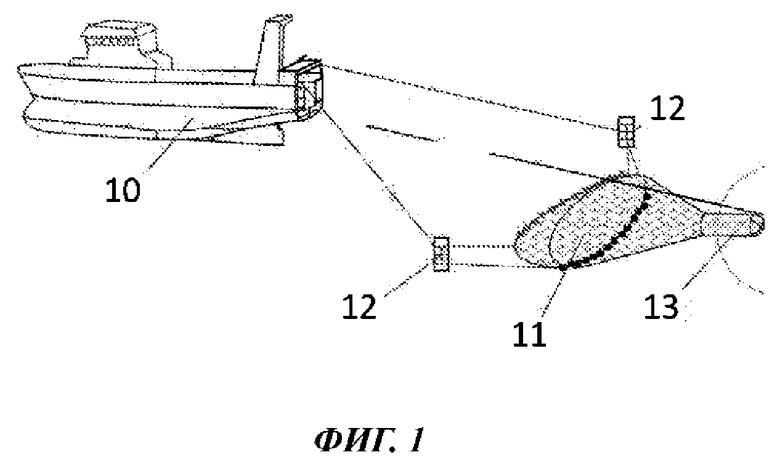
1. Система (2) обработки улова, содержащая:
а) по меньшей мере одну систему (3) сбора улова, содержащую:
i. одно депо (10) для обработки улова,
ii. один или более тралов (11) и
iii. по меньшей мере одну систему (4) транспортирования улова,
при этом указанная система (4) транспортирования улова содержит по меньшей мере транспортную систему (5), которая содержит по меньшей мере транспортировочный контейнер (101) и транспортировочный узел (251), содержащий устройство (264) для разъемного соединения с транспортировочным беспилотным аппаратом (107) рыбопромыслового флота и устройство для соединения с одним или более устройствами рыбопромыслового флота.
2. Система обработки улова по п. 1, в которой система транспортирования улова дополнительно содержит транспортировочный беспилотный аппарат (107) рыбопромыслового флота.
3. Система обработки улова по п. 2, в которой транспортировочный беспилотный аппарат (107) рыбопромыслового флота выполнен с возможностью перемещения транспортной системы (5) и с возможностью разъемного соединения с указанной транспортной системой.
4. Система обработки улова по любому из пп. 1-3, в которой указанное депо (10) для обработки улова представляет собой одно из следующего: траловое судно, рыбопромысловая плавучая база, рыбоприемный пункт и накопительный контейнер (91).
5. Система (2) обработки улова по любому из пп. 1-4, в которой указанная система обработки улова дополнительно содержит накопительный контейнер (91).
6. Система (2) обработки улова по п. 4 или 5, в которой указанный накопительный контейнер (91) имеет поверхность, выполненную, в основном, из непроницаемого материала.
7. Система (2) обработки улова по п. 4 или 5, в которой указанный накопительный контейнер (91) имеет поверхность, выполненную, в основном, из проницаемого материала.
8. Система (2) обработки улова по п. 4, в которой траловое судно (10) выполнено с возможностью буксирования по меньшей мере одного трала (11), причем куток (13) содержит устройство для разъемного соединения с транспортировочным узлом (251), при этом указанный транспортировочный узел (251) содержит устройство для разъемного соединения с указанным транспортировочным контейнером (101).
9. Система (2) обработки улова по п. 8, в которой указанное устройство для разъемного соединения с кутком (13) и транспортировочным узлом (251) представляет собой разгрузочную заслонку с дистанционным управлением, расположенную на задней стороне кутка (13).
10. Система (2) обработки улова по любому из пп. 2-9, в которой указанный транспортировочный беспилотный аппарат (107) рыбопромыслового флота содержит устройство для перемещения указанного транспортировочного узла (251).
11. Система (2) обработки улова по любому из пп. 1-3, в которой указанное депо 10 для обработки улова представляет собой судно, содержащее устройство для буксирования накопительного контейнера (91).
12. Система (2) обработки улова по п. 11, в которой указанное устройство для буксирования представляет собой одно из следующего: трос, линь, проволочный канат и веревочный канат.
| Способ определения реологических свойств буровых растворов | 1985 |
|
SU1399321A1 |
| WO 2010015254 A1, 11.02.2010 | |||
| US 3987745 A, 26.10.1976 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА УЛОВИСТОСТИ ТРАЛА | 2003 |
|
RU2275021C2 |

