Данное изобретение относится к способу и устройству для контроля эффективности действий пользователя во время циклической работы тренажера. Тренажеры, содержащие шатуны или аналогичные элементы, приводимые в действие конечностями, включают, помимо прочего, велосипеды (которые могут представлять собой велотренажеры с горизонтальной посадкой и/или статические велотренажеры с вертикальной посадкой, дорожные или внедорожные велосипеды или двухместные велосипеды), трехколесные велосипеды, тренажеры для верхней части тела, гребные лодки, гребные тренажеры и водные велосипеды.
В соответствии с одним аспектом данного изобретения предложен способ контроля эффективности действий пользователя во время циклической работы тренажера, содержащего пару приводных элементов, приводимых в действие конечностями человека, соединенных для циклического движения, причем способ включает в себя этапы:
(i) измерения и контроля движущей силы, прикладываемой к приводным элементам во время циклического движения приводных элементов, и генерирования одного или более указывающих это сигналов силы;
(ii) применения одного или более сигналов силы для получения для каждого цикла движения приводных элементов по меньшей мере одного сигнала максимального коэффициента эффективности действий пользователя, указывающего изменение силы относительно максимального значения силы, измеренного для этого цикла движения, и по меньшей мере одного сигнала минимального коэффициента эффективности действий пользователя, указывающего изменение силы относительно минимального значения силы, измеренного для этого цикла движения;
(iii) применения сигналов максимального и минимального коэффициентов эффективности действий пользователя, полученных на этапе (ii), для генерирования сигнала оценки эффективности действий пользователя, который указывает эффективность действий пользователя в управлении циклическим движением приводных элементов; и
(iv) применения сигнала оценки эффективности действий пользователя при записи, отображении, распечатывании, сохранении, загрузке, выгрузке или передаче одного или более показателей, представляющих сигнал оценки эффективности действий пользователя.
Данное изобретение обеспечивает расчет оценки эффективности действий пользователя, которая может отображаться для пользователя. Данная оценка характеризуется тем, что она снижается в случае больших изменений силы в отношении (т.е. относительно) максимального и/или минимального значений силы, измеренных для каждого цикла движения во время циклического движения приводных элементов. Данная оценка может быть незамедлительно предоставлена пользователю тренажера, который может использовать обратную связь для достижения оптимальной эффективности действий.
Предпочтительно, этап (i) измерения и контроля движущей силы, прилагаемой к приводным элементам, включает в себя периодическое инициирование генерирования одним или более датчиками силы, которые функционально связаны с приводными элементами, одного или более сигналов силы.
Для удобства один или более датчиков силы измеряют силу, действующую на приводной компонент или в приводном компоненте, который приводится в действие приводными элементами.
Кроме того, для удобства приводной компонент представляет собой приводную цепь, и один или более датчиков силы измеряют натяжение приводной цепи и генерируют один или более указывающих это сигналов.
Предпочтительно, частота генерирования сигналов силы составляет 100 Гц.
В вариантах реализации этап (ii) включает в себя этап, в отношении по меньшей мере одного цикла движения, или его части, одного из указанных приводных элементов, на котором указанный приводной элемент обеспечивает преобладающую долю движущей силы, (iia) сравнения амплитуды совокупности периодически генерируемых сигналов силы, генерируемых во время по меньшей мере одного цикла движения или его части, с сигналом силы максимальной амплитуды, генерируемым во время указанного цикла движения или его части, и на основании сравнения генерирования по меньшей мере одного сигнала максимальной эффективности действий пользователя; и (iib) сравнения амплитуд совокупности периодически генерируемых сигналов силы, генерируемых в течение по меньшей мере одного цикла движения или его части, с сигналом силы минимальной амплитуды, генерируемым во время указанного цикла движения или его части, и на
основании сравнения генерирования по меньшей мере одного сигнала минимальной эффективности действий пользователя.
Кроме того, предпочтительно способ может включать в себя повторение этапов (iia) и (iib) в отношении по меньшей мере одного цикла движения или его части, другого указанного приводного элемента, на которых другой указанный приводной элемент обеспечивает преобладающую долю движущей силы.
Обычно коэффициент полезного действия рассчитывают как отношение выполненной работы к затраченной энергии. Сохранение эффективности за счет экономии энергии или максимального увеличения выполняемой работы на единицу затраченной энергии является ключом к успеху в определенных видах спорта, связанных с выносливостью и другими видами езды на велосипеде, троеборьем, легкой атлетикой и многими видами гребли.
При езде на велосипеде силы, крутящие моменты или мощность, передаваемые велосипедистом на педали велосипеда, могут быть измерены с помощью силовых педалей или оснащенных измерительными приборами (т.е. измеряющих силу или крутящий момент) шатунов. Сравнительно равномерное распределение крутящего момента вокруг оси шатуна на протяжении всего цикла работы шатуна в течение многих лет продвигалось в качестве «эффективной» техники.
Однако всего лишь понимание коэффициента полезного действия не так важно, как определение того, насколько эффективна техника педалирования. Данное изобретение обеспечивает оценку взаимосвязи между (а) движущей силой, прилагаемой к приводным элементам тренажера, и (b) эффективностью действий пользователя во время циклической работы приводных элементов, и, следовательно, дополняет измерения силы, крутящего момента и/или мощности, делая их более полезными для тренеров и спортсменов.
Во время езды на велосипеде движение нижних конечностей, параллельное сагиттальной плоскости, ограничивается круговой траекторией из-за геометрической конфигурации шатунов и педалей велосипеда. В рамках этих ограничений опытный велосипедист может варьировать свою технику педалирования, изменяя кинематику своих нижних конечностей (например, бедра, голени и ступни) и активируя мышцы. Технику езды на велосипеде можно оценить путем измерения кинематики суставов и комбинаций активации мышц, но для таких измерений требуется специальное оборудование и, следовательно, это обычно доступно только спортсменам спорта высших достижений.
Чтобы продвигать оптимальную технику педалирования, велосипедисту полезно контролировать то, как он поворачивает шатуны во время езды, а также получать немедленную обратную связь в режиме реального времени о том, насколько эффективна техника проворачивания шатунов/педалирования. Современные статические велотренажеры могут отображать данные о мощности, частоте сердечных сокращений и частоте педалирования, а также некоторые другие параметры езды на велосипеде в режиме реального времени, чтобы предоставлять велогонщикам подробную и точную обратную связь. Аналогичные данные доступны при езде на дорожном или внедорожном велосипеде, снабженном шатунами, оснащенными измерительными приборами, или силовыми педалями. Данные о частоте сердечных сокращений могут быть получены различными способами, например, с помощью датчика нагрудного ремня. Аналогичные измерительные приборы могут использоваться в других изделиях для циклических упражнений, таких как приведенные в настоящем документе.
Известно, что информация о технике проворачивания шатунов или педалирования велосипедиста обеспечивается с помощью дисплея или графика так называемого «polar view™». Дисплей polar view™ был разработан заявителем и организациями-компаньонами и поставляется на рынок исключительно организацией-компаньоном заявителя Wattbike Limited.
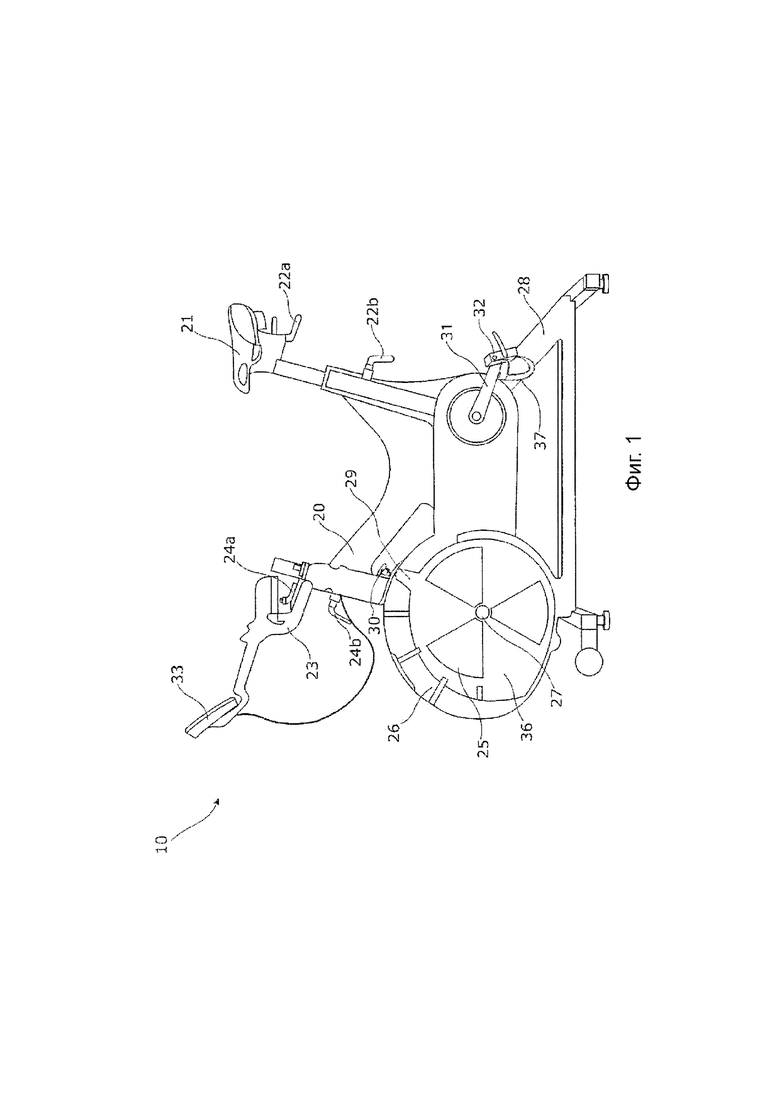
Polar view™ генерируется на основании данных измерения силы, записываемых с частотой дискретизации, например, 100 Гц, в ходовой части статических велотренажеров Wattbike® 10 и Wattbike Atom™ 50, показанных на фиг. 1 и 4.
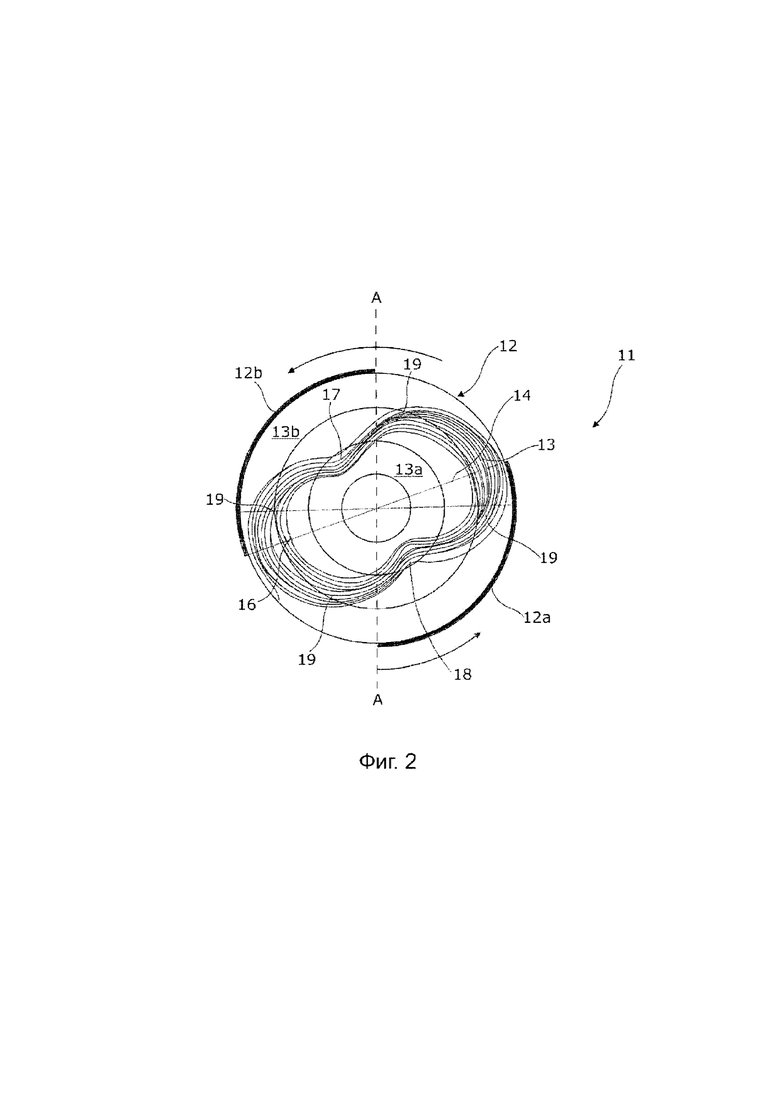
Пример polar view™ 11 показан на фиг. 2, на которой полярная сетка 12 представляет 360° циклического движения шатунов педалей Wattbike® 10 или Wattbike Atom™ 50.
Утолщенные части 12а, 12b сетки 12 соответствуют нажатиям соответственно правой и левой педалей Wattbike® 10 или Wattbike Atom™ 50. Линии 13 графика являются множественными и представляют множество оборотов шатунов педалей. Линии графика в правой части 13а, по одну сторону от линии А-А на фиг. 2, представляют движущую силу, прилагаемую к шатунам педалей во время хода вниз правого шатуна, когда преобладающая движущая сила, прилагаемая к шатунам педалей, прилагается через правый шатун. Линии графика в левой части 13b, по другую сторону от линии А-А на фиг. 2, представляют движущую силу, прилагаемую к шатунам педалей во время хода вниз левого шатуна, когда преобладающая движущая сила, прилагаемая к шатунам педалей, прилагается через левый шатун.
Как известно в области велоспорта, максимальное усилие, прилагаемое через шатун педали, возникает, когда каждый шатун прошел примерно 1/3 пути от положения своей верхней мертвой точки (tdc; top dead centre) за полный оборот шатуна на 360° - обычно от 100° до 120° от положения верхней мертвой точки. Точка приложения максимальной силы проиллюстрирована в polar view™, показанном на фиг. 2, линией 14 по отношению к правому шатуну и линией 16 по отношению к левому шатуну.
Polar view™ 11 может быть нанесен на график с помощью принтера, но чаще отображается с помощью дисплея в режиме реального времени, подключенного к электронному оборудованию Wattbike® 10 или Wattbike Atom™ 50, причем данный дисплей подключен к электронному оборудованию посредством проводов или по протоколу беспроводной связи. Такой дисплей постоянно обновляется. Отображаемые линии 14, 16 угла максимального значения силы относятся к самому последнему завершенному обороту педали среди линий графика.
Пользователь Wattbike® 10 или Wattbike Atom™ 50 может просматривать polar view™ 11 во время тренировки и может в режиме реального времени стремиться оптимизировать свою технику педалирования путем улучшения визуальной формы данных polar view™ 11.
В частности, пользователь может стремиться достичь одного или более из следующих улучшений:
• создать стягиваемый угол между линиями 14, 16 угла максимального значения силы как можно ближе к 180°, тем самым обеспечивая согласованность усилий левой и правой ног;
• свести к минимуму различия между участками 17, 18 наименьшей силы линий 13 графика polar view™, с одной стороны, и участками 19 средней силы, с другой стороны; и
• (в случае велосипедистов-спринтеров и, что менее важно для велосипедистов, участвующих в соревнованиях на выносливость) максимально увеличить амплитуду линии графика (и, следовательно, максимальную прилагаемую силу), вызывая прохождение линии 13 графика как можно дальше вдоль линий 14, 16 угла максимального значения силы.
В сочетании с другими характеристиками изделий Wattbike® 10, 50 модель polar view™ 11 зарекомендовала себя как высокоэффективное тренировочное приспособление. Однако обратная связь, достигаемая за счет использования polar view™, является по существу визуальной и, следовательно, зависит от оценок, сделанных пользователем или тренером, просматривающим данные polar view™. Данное изобретение практично усиливает или заменяет зависимость пользователя от polar view™ во время использования Wattbike® 10 или Wattbike Atom™ 50, поскольку оно обеспечивает немедленную оценку, указывающую эффективность педалирования пользователя, и, таким образом, устраняет необходимость в визуальном анализе polar view™ который может быть неточным из-за следующих факторов:
• уровень усталости пользователя, когда он/она оценивает свои показатели;
• переходной характер некоторых данных polar view™ 11 из-за характеристики обновления в режиме реального времени, описанной выше; и
• периоды интенсивных усилий, затрудняющие сосредоточение внимания на линиях отображения polar view™ 11.
Данное изобретение также обладает преимуществами в сочетании с множеством других тренажеров для циклических движений или тренировочных тренажеров, включая, без ограничений, упомянутые в данном документе.
В предпочтительных вариантах реализации приводные элементы, приводимые в действие конечностями человека, соединены для циклического движения для приведения в действие ходовой части, которая передает или распределяет циклическое усилие.
В таких вариантах реализации движущую силу, прилагаемую к приводным элементам во время циклического движения приводных элементов, можно измерять и контролировать путем измерения силы, генерируемой ходовой части по меньшей мере в одном месте.
Однако в других вариантах реализации движущую силу, прикладываемую к приводным элементам во время циклического движения приводных элементов, можно измерять и контролировать с помощью силовых педалей и/или оснащенных измерительными приборами шатунов или с помощью измерительных устройств, расположенных в ступице колеса или в обуви, стельках или прикрепляемых шипах обуви пользователя.
Данное изобретение не ограничено использованием на статическом велотренажере или даже на более обычных велосипедах, способных передвигаться. Вместо этого способ согласно данному изобретению применим и потенциально полезен для всех тренажеров, приводимых в движение мускульной силой человека, содержащих пары шатунов, приводимых в действие конечностями человека, или другие элементы, приводимые в действие конечностями. Например, спортсмен, пользующийся тренажером для верхней части тела, может извлечь пользу из понимания эффективности вращения шатунов такого тренажера при работе над физической формой верхней части тела. Данное изобретение также обладает потенциальным преимуществом в отношении управляемых вручную брашпилей и шпилей (и тренажеров, имитирующих действия таких устройств), которые встречаются в яхтах и шлюпках, особенно предназначенных для гонок. Кроме того, данное изобретение обладает потенциальным преимуществом для рабочих шлюпок и гребных тренажеров, таких как так называемый «статический бак», в котором каждое из пары весел или весел-гребков может рассматриваться как приводной элемент, приводимый в действие конечностями человека, как упомянуто в данном документе, и кинематическая цепь, проходящая от рукоятки такого весла до воды или другой жидкости, в которой лопасть весла подвижна, как ходовая часть, упоминаемая в данном документе. Еще один класс тренажеров, в которых потенциально могут быть использованы способ и устройство согласно данному изобретению, включает эллиптические тренажеры, тренажеры для лыжных гонок, тренажеры типа «бесконечная лестница», степперы, водные велосипеды и вертикальные тренажеры для скалолазания, все из которых содержат приводные элементы, приводимые в действие конечностями человека.
Поэтому, предпочтительно, приводные элементы выбраны из перечня, включающего шатуны педалей, шатуны для упражнений для верхней части тела, шатуны шпиля, шатуны брашпиля, весла статического бака, весла гребных лодок, педали степпера или тренажера типа «бесконечная лестница», педали и/или рукоятки эллиптического тренажера, педали и/или рукоятки тренажера для лыжных гонок, педали и/или рукоятки тренажера для скалолазания или педали водного велосипеда. Другими словами, как указано, способ согласно данному изобретению применяется в отношении ряда типов тренажеров.
Предпочтительно, способ дополнительно включает в себя этап модификации циклической работы приводных элементов на основании оценки эффективности действий пользователя.
Модификация циклической работы шатунов или других приводных элементов равносильна включению обратной связи пользователя в использование тренажера. Считается, что это очень эффективно для улучшения спортивной результативности, независимо от уровня физической подготовки пользователя.
Является преимуществом, если тренажер содержит соответствующую педаль или ручку, которая прикреплена с возможностью вращения к каждому указанному приводному элементу, причем приводные элементы соединены для приведения во вращение приводного колеса, и приводные элементы взаимно образуют угол 180°.
В частности, указанный тренажер предпочтительно представляет собой или содержит статический тренажер, предпочтительно содержащий педали, а не ручки. Однако, как отмечено выше, способ согласно данному изобретению в равной степени применим к ряду тренажеров с ручным приводом.
В таких вариантах реализации приводное колесо может содержать один или более датчиков, которые облегчают генерирование сигнала в положениях верхней мертвой точки и нижней мертвой точки приводных элементов, чтобы обеспечить контроль угловых положений приводных элементов во время их циклического движения.
В частности, приводное колесо может содержать один или более датчиков, которые облегчают генерирование сигнала в положениях верхней мертвой точки и нижней мертвой точки приводных элементов, чтобы обеспечить контроль угловых положений приводных элементов во время их циклического движения.
Указанный тренажер может представлять собой статический велотренажер. Педали такого тренажера необязательно могут быть снабжены туклипсами и педальными ремешками и или могут принадлежать к определенному типу без туклипсов, включая педали, предназначенные для захвата обувными шипами с передачей усилия.
Статический велотренажер особенно полезен для занятий на велотренажере в помещении как в общем виде, так и при погодных условиях, не являющихся идеальными. Контролируемая среда для занятий на велотренажере в помещении дает возможность велосипедисту выделять определенные области подготовки езды на велосипеде и техники, над которыми велосипедист может быть не в состоянии работать при езде на велосипеде по дорогам, и концентрироваться на них. Кроме того, в настоящее время велосипедисты-любители и профессиональные велосипедисты часто находят полезным включать использование статического велотренажера в помещении в свои программы тренировок даже в периоды хорошей погоды.
В вариантах реализации, в которых приводные элементы соединены для циклического движения для приведения в действие ходовой части, которая передает или распределяет циклическое усилие, приводной механизм может приводить в действие вентилятор, который нагнетает воздух в камеру через выпускное отверстие, препятствующее прохождению воздуха, тем самым распределяя циклическое усилие. Это основное средство распределения циклического усилия, используемое в указанном выше Wattbike® 10.
Предпочтительно, размеры выпускного отверстия регулируются для обеспечения возможности регулирования степени сопротивления выпускного отверстия прохождению воздуха, причем способ включает в себя этап регулирования размеров выпускного отверстия.
В других вариантах реализации, в которых приводные элементы соединены для циклического движения для приведения в действие ходовой части для передачи или распределения циклического усилия, приводной механизм может содержать магнитный и/или электромагнитный резистор циклического усилия, причем способ включает в себя этап переключения или регулирования циклического сопротивления с помощью магнитного и/или электромагнитного резистора. Это основное средство распределения циклического усилия, используемое в указанном Wattbike Atom™ 50.
Предпочтительно, в таких вариантах реализации степень сопротивления, обеспечиваемого таким резистором, можно регулировать, например, путем перемещения магнита, установленного посредством винтовой резьбы, избирательно ближе к элементу ходовой части или дальше от него.
В других тренажерах, основанных на циклических движениях, в пределах объема данного изобретения можно использовать другие механизмы для распределения циклического усилия.
В вариантах реализации, в которых преобладающая доля циклического усилия пользователя при приведении приводных элементов в циклическое движение чередуется между левой и правой конечностями один раз на цикл движения приводных элементов, этап (i) включает в себя присваивание значений сигнала движущей силы, измеренных во время цикла движения, одному или другому из приводных элементов на основании точек чередования нагрузки во время цикла движения, этап (ii) включает в себя получение сигналов максимального и минимального коэффициентов эффективности действий пользователя для каждого приводного элемента, и этап (iii) включает в себя использование сигналов максимального и минимального коэффициентов эффективности действий пользователя, полученных для каждого приводного элемента на этапе (ii), для генерирования сигнала оценки эффективности действий пользователя для каждого приводного элемента перед генерированием общей оценки эффективности действий пользователя на основании среднего значений сигналов оценки эффективности действий пользователя, сгенерированных для каждого приводного элемента.
Присваивание численного представления эффективности действий пользователя помогает пользователю тренажера видеть, насколько близка его/ее техника к технике, соответствующей оптимальной эффективности действий.
Предпочтительно, этап генерирования сигнала оценки эффективности действий пользователя на этапе (iii) дополнительно включает в себя использование предварительно определенного весового коэффициента с сигналами максимального и минимального коэффициентов эффективности действий пользователя, рассчитанными на этапе (ii), причем весовой коэффициент основан на соотношении для тренажера между эффективной силой, приложенной к приводным элементам, и суммарной силой, приложенной к приводным элементам и требуемой для достижения эффективной силы.
Этап генерирования сигнала оценки эффективности действий пользователя на этапе (iii) также может дополнительно включать в себя использование предварительно определенного коэффициента замедления, чтобы оценка эффективности действий пользователя для каждого приводного элемента находилась в оптимальном диапазоне от 70 до 80.
Максимальный коэффициент эффективности действий пользователя можно рассчитать следующим образом:
 ,
,
где средняя максимальная сила представляет собой среднее значение значений сигнала движущей силы, измеренных для этого цикла движения в течение предварительно определенного сегмента цикла, в котором максимальное значение сигнала силы представляет собой среднюю измерительную точку значений сигнала движущей силы, измеренных в данном сегменте. Такое измерение может происходить за счет работы одного или более датчиков и генерирования совокупности выходных сигналов силы.
В таких вариантах реализации минимальный коэффициент эффективности действий пользователя можно рассчитать следующим образом:
 ,
,
где средняя минимальная сила представляет собой среднее значение значений сигнала движущей силы, измеренных для этого цикла движения в пределах предварительно определенного сегмента цикла, в котором минимальное значение сигнала силы представляет собой среднюю измерительную точку значений движущей силы, измеренных в данном сегменте. Такое измерение опять-таки может происходить за счет работы одного или более датчиков и генерирования нескольких выходных сигналов силы.
Максимальный и минимальный коэффициенты эффективности действий пользователя отражают форму профиля максимальной и минимальной движущей силы. В случае велосипеда (будь то статический велотренажер или обычный велосипед) оптимальный профиль движущей силы определяет относительно пологую кривую через максимальное и минимальное значение движущей силы, измеренное для каждого цикла движения. Это дает более высокие максимальное и минимальное значения коэффициента эффективности действий пользователя и, следовательно, более высокую общую оценку эффективности действий пользователя.
В вариантах реализации, в которых тренажер содержит приводные элементы, соединенные для приведения во вращение приводного колеса таким образом, что приводные элементы взаимно образуют угол 180°, среднюю максимальную силу и среднюю минимальную силу предпочтительно определяют на основании значений движущей силы, измеренных по сегментам, составляющим 45°. Как указано, сегменты центрируются соответственно на максимальном и минимальном значениях силы в цикле шатуна и т.д.
Предпочтительно, способ включает в себя этап генерирования polar view™, иллюстрирующего движущую силу, прилагаемую к приводным элементам, когда она распределяется между приводными элементами для каждого цикла движения.
Возможность контролировать вращение приводных элементов при использовании тренажера может быть отображена в виде кривой силы в форме графика polar view™. График polar view™ иллюстрирует переменную движущую силу, прилагаемую посредством приводных элементов, и положения приводных элементов во время приложения силы.
Чтобы обеспечить возможность расчета точного представления эффективности действий пользователя в форме общей оценки эффективности действий пользователя, движущую силу, прилагаемую к приводным элементам, предпочтительно измеряют с частотой около 100 Гц.
В вариантах реализации, в которых тренажер содержит ходовую часть, содержащую приводную цепь, этап (i) может включать в себя измерение натяжения цепи и генерирование одного или более сигналов, указывающих это.
В вариантах реализации, в которых тренажер содержит ходовую часть, содержащую ось, этап (i) может включать в себя измерение значения крутящего момента на оси и генерирование одного или более сигналов, указывающих это.
Способ может включать в себя генерирование множественных показателей, представляющих оценку эффективности действий пользователя в течение периода контроля, причем способ необязательно включает в себя этап анализа сигналов оценки эффективности и обнаружения изменений в значениях сигналов оценки эффективности в течение периода контроля.
Кроме того, способ может включать в себя этап записи, передачи, загрузки, выгрузки, сохранения, распечатывания или отображения данных, указывающих на использование тренажера.
Способ может включать в себя отображение, распечатывание, сохранение, загрузку или передачу программы тренировок пользователя.
Предпочтительно, программа тренировок пользователя может быть модифицирована на основании оценки эффективности действий пользователя для одного или более циклов движения приводных элементов.
Программа тренировок пользователя дает пользователю рекомендации. Корректировка программы тренировок на основании оценки эффективности действий пользователя создает индивидуальный режим тренировок и приводит к более продуктивной тренировке пользователя.
Для генерирования оценки эффективности действий пользователя можно использовать одно или более программируемых устройств. Дополнительно или альтернативно, можно использовать другие типы вычислительных устройств, которые не обязательно должны быть программируемыми. Примеры включают, помимо прочего, схемы операционных усилителей.
Предпочтительно, одно или более программируемых или других вычислительных устройств содержат дисплей и функционально связаны с тренажером. Дополнительно или альтернативно, одно или более программируемых или других вычислительных устройств могут быть выполнены с возможностью выдавать другой сенсорный выходной сигнал, например, помимо прочего, звуковой выходной сигнал.
Пользователь, способный видеть или, например, слышать результат, указывающий оценку эффективности действий пользователя, сгенерированную программируемым или другим вычислительным устройством, воспользуется немедленной обратной связью в режиме реального времени относительно циклических усилий, которые он/она прилагает, и относительно эффективности способа вращения им/ею шатуна в конкретный момент времени.
Преимущественно, способ включает в себя этап генерирования одного или более сигналов значений мощности пользователя, указывающих мощность, генерируемую при работе приводных элементов, а также записи, отображения, распечатывания, сохранения, загрузки, выгрузки или передачи одного или более значений мощности пользователя.
Такая «тренировка с мощностью» предоставляет количественное число, которое точно сообщает пользователю, сколько мощности он/она генерирует во время тренировки. Это ценные данные, измерения которых можно выполнять независимо от внешних факторов, таких как усталость, гидратация и температура. Показатель генерируемой мощности дает спортсмену возможность быть уверенным в результатах тренировки в определенных тренировочных зонах, например, знакомых соревнующимся велосипедистам.
Предпочтительно, тренажер содержит по меньшей мере один приемник сигналов данных о частоте сердечных сокращений, причем способ включает в себя этап использования одного или более из прикрепленных к нагрудному ремню, ремешку на запястье, ремешку на щиколотке или зажиму для пальцев датчиков, передающих частоту сердечных сокращений, при генерировании одного или более значений сердечных сокращений пользователя.
Также, преимущественно, способ включает в себя этапы генерирования одного или более сигналов, указывающих значения частоты сердечных сокращений пользователя, а также записи, отображения, распечатывания, сохранения, загрузки, выгрузки или передачи одного или более значений частоты сердечных сокращений пользователя, сгенерированных на основании таких сигналов. Такие значения могут отображаться одновременно с данными о мощности пользователя, как описано выше. Заявитель обнаружил, что это обеспечивает особенно эффективные методы тренировок.
Частота сердечных сокращений представляет собой полезный показатель для определения идеальных диапазонов интенсивности для тренировок, поскольку частота сердечных сокращений показывает реакцию организма на усилия. Также контроль данных о частоте сердечных сокращений может в режиме реального времени отображать эффекты обезвоживания и усталости; и, кроме того, может быть очень полезным при стремлении улучшить физическую форму лица, которое восстанавливается после болезни, хирургического вмешательства или других форм оказания медицинской помощи. Данные о частоте сердечных сокращений во время упражнений дополнительно можно использовать, например, для контроля реакции индивидуума на определенные типы лекарственных средств. Они также полезны при оценке уровня физической подготовки индивидуума, что может потребоваться в процессе отбора для определенных заданий/должностей, например, в вооруженных силах, правоохранительных органах, пожарной службе и организациях гражданской обороны.
Предпочтительно, оценка эффективности действий пользователя генерируется с помощью приложения, которое можно скачать или получить к нему доступ через облачные вычисления.
Как хорошо известно, облачные вычисления обеспечивают доступ к приложениям, программному обеспечению для анализа и пользовательским данным через Интернет с достаточной гибкостью и доступностью, не занимая значительного процентного объема памяти программируемого устройства, такого как устройство, используемое для выполнения этапов способа согласно данному изобретению.
В соответствии с другим аспектом данного изобретения предложен тренажер, содержащий пару приводных элементов, приводимых в действие конечностями человека, соединенных для циклического движения, и электронное устройство, содержащее по меньшей мере один сенсорный индикатор, функционально связанный с тренажером, причем тренажер и электронное устройство генерируют указанную оценку эффективности действий пользователя, осуществляя способ согласно данному изобретению, как определено в данном документе, и выводя оценки эффективности действий пользователя через сенсорный индикатор.
Предпочтительно, сенсорный индикатор представляет собой видимый дисплей, и этап вывода оценки эффективности действий пользователя может включать в себя отображение оценки эффективности действий пользователя с помощью указанного дисплея. Дополнительно или альтернативно, сенсорный индикатор может представлять собой или содержать звуковой индикатор, и этап вывода оценки эффективности действий пользователя может включать в себя генерирование звуковой индикации оценки эффективности действий пользователя с помощью указанного звукового индикатора.
Предпочтительно, электронное устройство выбирают из перечня, включающего портативный или настольный компьютер, так называемый «планшет», смартфон или карманный персональный компьютер (КПК). Дополнительно или альтернативно, электронное устройство может представлять собой или содержать специализированное устройство контроля, функционально связанное с тренажером.
Преимущественно, тренажер выполнен в виде статического велотренажера, содержащего соответствующую педаль, прикрепленную с возможностью вращения к каждому приводному элементу. Однако тренажер может быть выполнен как любой из ряда других типов, включая, помимо прочего, приведенные в данном документе.
Далее следует описание предпочтительных вариантов реализации данного изобретения в виде неограничивающих примеров со ссылкой на прилагаемые графические материалы, в которых:
на фиг. 1 показан первый вариант реализации тренажера в виде Wattbike®;
на фиг. 2 показан образец polar view™;
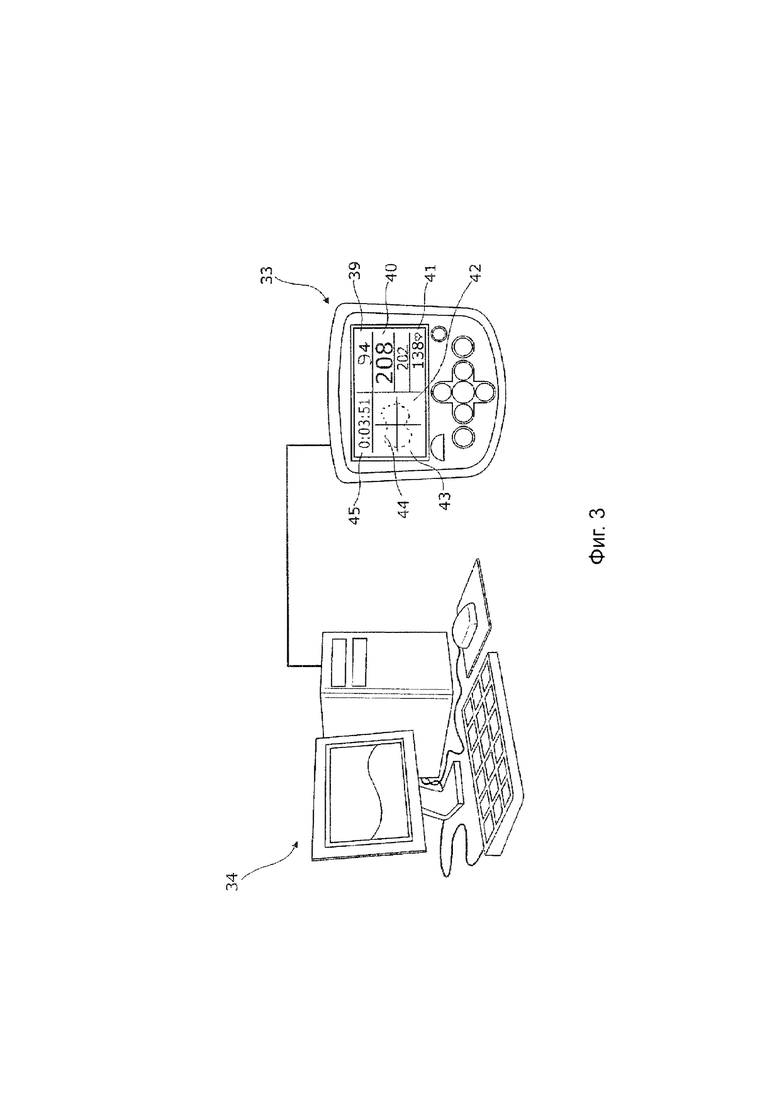
на фиг. 3 показан вид спереди дисплея программируемого устройства согласно варианту реализации данного изобретения, отображающего оценку эффективности действий пользователя, подключенного к компьютеру;
на фиг. 4 показан второй вариант реализации тренажера в виде Wattbike Atom™; и
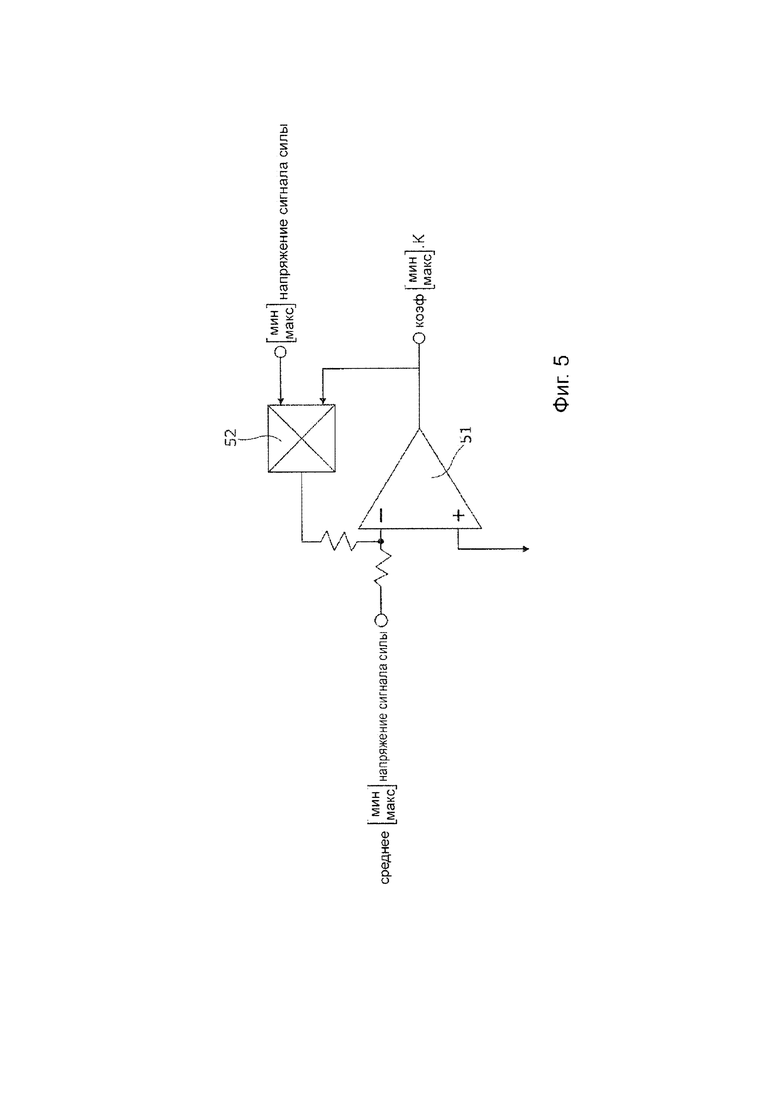
на фиг. 5 схематично показан один вариант реализации непрограммируемого устройства, которое могут использовать для получения сигналов с выходов датчиков в способе согласно данному изобретению.
Предпочтения и варианты для данного аспекта, варианта реализации изобретения, признака или параметра изобретения, если контекст не указывает иное, должны рассматриваться как раскрытые в сочетании с любыми и всеми предпочтениями и вариантами для всех других аспектов, вариантов реализации изобретения, признаков и параметров изобретения.
Используемый в данном документе термин «сигналы» относится преимущественно к электрическим сигналам, а ссылки на значение или амплитуду таких сигналов представляют собой ссылки на такие параметры, как значения напряжения, которые изменяются в зависимости от выходов датчиков, которые генерируют сигналы. Однако описанный в данном документе способ возможно выполнить с использованием сигналов, отличных от электрических. Вместо этого по меньшей мере в некоторых вариантах реализации могут использовать оптические, магнитные и звуковые сигналы.
Далее будет описан вариант реализации данного изобретения со ссылкой на способ контроля эффективности действий пользователя во время работы тренажера в виде статического тренажера 10 Wattbike®. В качестве альтернативы, статический тренажер может представлять собой другой тип статического велотренажера, такой как Wattbike Atom™ 50, показанный на фиг. 4, тренажер яхтенного шпиля или брашпиля, тренажер типа «бесконечная лестница» или степпер, эллиптический тренажер, тренажер для лыжных гонок, тренажер для скалолазания, тренажер для верхней части тела или статический бак.
Кроме того, как отмечено в данном документе, способ согласно данному изобретению можно использовать в различных передвижных устройствах, таких как дорожные или внедорожные велосипеды, гребные лодки и элементы (например, брашпили) парусных судов. Поэтому следующее описание, относящееся к конкретной форме статического велотренажера, представлено только в качестве примера и не ограничивает объем данного изобретения.
На фиг. 1 показано устройство Wattbike® 10. Wattbike® 10 содержит раму 20 велотренажера, содержащую сиденье 21, положение которого можно регулировать с помощью рычагов 22а, 22b регулирования сиденья; и руль 23, положение которого можно регулировать с помощью регулировочных рычагов 24а, 24b руля. Wattbike® 10 содержит предохранительный кожух 26 переднего колеса, в котором находится маховик, который не виден на фиг. 1, но выполнен с возможностью вращения вокруг горизонтальной оси, совпадающей с центром 27 по существу круглого корпуса 26. Wattbike® 10 содержит опорную стойку 28, на которой обычно расположено заднее колесо велотренажера. Опорная стойка 28 содержит сцепляющиеся с полом ограничители 28а, 28b, которые, соответственно, проходят по обе стороны от продольной центральной плоскости Wattbike 10 для стабилизации велотренажера от бокового наклона.
Как видно из предпочтительного варианта реализации, каждый ограничитель 28а, 28b содержит необязательную проходящую вниз, сцепляющуюся с полом ножку. Опорная стойка 28 содержит жесткий, проходящий вперед элемент 30 рамы, который на своем переднем конце лежит под предохранительным кожухом 26 колеса и прикреплен к нему.
Кроме того, сцепляющиеся с полом ограничители 30а, 30b проходят в боковом направлении от элемента 30, а также могут содержать необязательные сцепляющиеся с полом ножки. Элементы опорной рамы неподвижно прикреплены друг к другу и обеспечивают поддержку функциональных частей тренажера 10 с большим запасом устойчивости.
В нижней секции рамы 20 Wattbike® 10 содержит пару приводных элементов в виде шатунов 31 педалей. В случае других статических тренажеров приводные элементы могут содержать, например, шатуны для упражнений для верхней части тела, шатуны шпиля, шатуны брашпиля, весла статического бака или весла гребной лодки.
Каждый шатун 31 педали содержит педаль 32, закрепленную на конце с возможностью вращения. В случае тренажера для верхней части тела ручки соединены с шатунами для упражнений для верхней части тела, а не с педалями.
Педали 32, показанные на фиг. 1, содержат комбинации 37 туклипса и ремня, которые помогают пользователю Wattbike® 10 расходовать энергию во время циклического движения шатунов 31 педалей. Стороны педалей 32, обратные сторонам, поддерживающим комбинации 37 туклипса и ремня, выполнены как так называемые педали «без туклипсов», которые могут содержать шипы, прикрепленные к велотуфлям пользователя.
Принципы и характер туклипсов, ремней и педалей без туклипсов хорошо известны в области велоспорта и не требуют подробного описания в данном документе.
Вариации в отношении проиллюстрированных конструкций опорной рамы, педали шатуна возможны в пределах объема данного изобретения, как будет понятно специалисту в данной области техники.
Шатуны 31 педали соединены через зубчатую передачу с взаимным образованием угла 180° таким образом, что при размещении одного из шатунов 31 педали в положении верхней мертвой точки другой шатун 31 педали размещен в положении нижней мертвой точки, и наоборот.
Зубчатая передача соединена с маховиком, расположенным в предохранительном кожухе 26 переднего колеса, посредством бесконечной приводной цепи, проходящей вокруг зубчатой передачи и вокруг зубчатой звездочки, установленной на маховике. Зубчатая передача, бесконечная приводная цепь и зубчатая звездочка определяют ходовую часть, которая передает циклическое усилие от шатунов 31 педали на маховик, циклическое движение шатунов 31 педали приводит во вращение зубчатую передачу, что, в свою очередь, приводит во вращение маховик через бесконечную приводную цепь и зубчатую звездочку.
К маховику прикреплен ряд равномерно разнесенных друг от друга радиальных лопастей вентилятора, а сторона предохранительного кожуха 26 колеса, которая видна на фиг. 1, содержит ряд из трех секторообразных решеток 25, через которые воздух всасывается внутрь объема, ограниченного предохранительным кожухом 26 колеса. Такое движение воздуха вместе с инерцией маховика обеспечивает сопротивление вращению маховика и имитирует сопротивление, испытываемое при езде на обычном велосипеде на открытом воздухе. Предохранительный кожух 26 колеса содержит одно или более выпускных отверстий, через которые воздух, всасываемый внутрь предохранительного кожуха 26 колеса, выпускается в результате движения маховика.
Предохранительный кожух 26 переднего колеса содержит рычаг 29 переключения пневматического тормоза, который позволяет регулировать уровень сопротивления маховика. Перемещение рычага 29 переключения пневматического тормоза вызывает вращение ряда соединенных с ним секторообразных заслонок 36 таким образом, чтобы выборочно и постепенно закрывать или открывать решетки 25, регулируя поток воздуха, поступающего в маховик. Открытие решеток 25 увеличивает поток воздуха, увеличивая сопротивление и, следовательно, имитируя езду на обычном велосипеде на более высокой передаче, чем когда решетки 25 более закрыты.
Кроме того, к предохранительному кожуху 26 переднего колеса прикреплен магнитный рычаг 30 подъема. Магнитный рычаг 30 подъема регулирует магниты сопротивления, которые предназначены для сопротивления и, следовательно, замедления вращения маховика, который изготовлен, например, из одного или более ферромагнитных материалов или содержит их. Магниты прикреплены к одной или более винтовым резьбам, прикрепленным к рычагу 30 подъема, и могут перемещаться к маховику и от маховика с помощью магнитного рычага 30 подъема для регулирования сопротивления, создаваемого магнитами. Магнитный рычаг 30 подъема вращается и имеет разные уровни сопротивления, давая возможность пользователю воссоздать ощущение езды по ровной поверхности или подъема на холм во время езды на велосипеде.
В соответствии с фиг. 4 можно увидеть, что Wattbike Atom™ 50 также содержит раму 20 велотренажера, содержащую сиденье 21, положение которого можно регулировать с помощью механизмов 22а, 22b регулирования; и руль 23, положение которого можно регулировать с помощью регулировочных рычагов 24а, 24b руля. Wattbike Atom™ 50 содержит предохранительный кожух 26 переднего колеса, в котором размещена пара дисков маховика, которые не видны, но расположены с возможностью вращения вокруг горизонтальной оси. Wattbike Atom™ 50 содержит опорную стойку 28, на которой обычно расположено заднее колесо велотренажера. На фиг. 4 показана опорная стойка 28, а конструкция, отличающаяся от опорной стойки 28, показанной на фиг. 1, функционально аналогична стойке, показанной на фиг. 1. Ввиду этого опорная стойка 28, показанная на фиг. 4, подробно не описана, ее конструкция и функционирование очевидны при визуальном осмотре фиг. 4.
В нижней секции рамы 20 Wattbike Atom™ 50 содержит пару приводных элементов в виде шатунов 31 педалей, причем педали 32 соединены с возможностью вращения с концами шатунов 31 педалей.
Конфигурация педалей 32 и ходовой части, соединяющей шатуны 31 педалей с маховиком для приведения во вращение маховика при циклическом движении шатунов 31, такая же, как в Wattbike® 10, и поэтому не будет еще раз подробно описана.
В отличие от использования решеток и заслонок, Wattbike Atom™ 50 содержит механизм сопротивления в виде одного или более постоянных магнитов, установленных в предохранительном кожухе 26 переднего колеса, чтобы создавать сопротивление вращению маховиков, по меньшей мере один из которых выполнен, например, из одного или более ферромагнитных материалов или содержит их. Магниты установлены на винте, находящемся в зацеплении с рамой с помощью резьбы, и обеспечен двигатель для приведения во вращение винта. В зависимости от направления приведения в действие такое приведение в действие выборочно перемещает магниты в зазор между парой маховиков или из него и таким образом перемещает магниты к магнитным ободам маховиков и от них, чтобы увеличить или уменьшить сопротивление, обеспечиваемое магнитами.
В других вариантах реализации предполагается, что один или более электромагнитов можно использовать вместо одного или более постоянных магнитов.
Как Wattbike® 10, так и Wattbike Atom™ 50 содержит измерительный блок для измерения движущей силы, прилагаемой к шатунам 31 педалей во время их циклического движения, причем измерительный блок измеряет движущую силу путем измерения натяжения бесконечной приводной цепи. Измерительный блок содержит рычаг, приложенный к бесконечной приводной цепи, причем рычаг слегка давит на боковую сторону цепи, и измерительный блок дополнительно содержит измерительный датчик для измерения восстанавливающей силы, прикладываемой цепью к рычагу, который имеет тенденцию сопротивляться давлению со стороны рычага. Предпочтительно, измерительный блок измеряет восстанавливающую силу, прилагаемую цепью к рычагу, с частотой дискретизации 100 Гц.
Измерительный блок соединен с датчиком, который в проиллюстрированных вариантах реализации имеет форму датчика магнитного поля, установленного в неподвижном положении на раме относительно зубчатой передачи. Пара сенсорных элементов в виде магнитов прикреплена к зубчатой передаче, причем сенсорные элементы расположены на зубчатой передаче для прохождения датчика при вращении зубчатой передачи, причем датчик генерирует сигнал при обнаружении проходящего сенсорного элемента. Это позволяет измерительному блоку вычислить скорость вращения зубчатой передачи.
В других вариантах реализации пара датчиков может быть расположена в неподвижных положениях относительно зубчатой передачи, и по меньшей мере один сенсорный элемент может быть прикреплен к зубчатой передаче. В еще других вариантах реализации положения датчика(ов) и сенсорного(ых) элемента(ов) можно поменять местами, причем датчик(и) устанавливают на зубчатой передаче, а сенсорный(е) элемент(ы) устанавливают на раме.
Сенсорные элементы расположены на зубчатой передаче, чтобы побудить датчик генерировать сигналы с интервалом 180°. В частности, за счет соответствующего расположения сенсорных элементов на зубчатой передаче датчик генерирует первый сигнал, когда один из шатунов 31 педалей находится в положении верхней мертвой точки, а другой из шатунов 31 педалей находится в положении нижней мертвой точки, и второй сигнал, когда один из шатунов 31 педалей находится в положении нижней мертвой точки, а другой из шатунов 31 педалей находится в положении верхней мертвой точки. Это позволяет измерительному блоку надежно определять временные положения шатунов 31 педалей на основании рассчитанной скорости вращения зубчатой передачи каждый раз, когда измеряется движущая сила, прилагаемая к шатунам 31 педалей.
Поскольку длина шатунов 31 педалей является постоянной, измерительный блок может легко рассчитать крутящий момент, который пользователь прикладывает через педали 32 и шатуны 31 педалей, непосредственно на основании измеренных значений движущей силы.
Поскольку силу на бесконечной приводной цепи определяет ввод данных пользователем, а все сопротивление прилагается к одной и той же оси Wattbike® 10 или Wattbike Atom™ 50, измерительный блок может измерять выходную мощность пользователя, при воздействии сопротивления вращению маховика(ов).
Wattbike® 10, показанный на фиг.1, управляется посредством программируемого или непрограммируемого устройства 33, установленного на передней части рамы 20, рядом с рулем 23. Устройство 33 функционально связано с измерительным блоком Wattbike® посредством проводного соединения или протокола беспроводной связи.
На фиг. 3 показан вид спереди устройства 33, подключенного к настольному компьютеру 34. Программируемое устройство 33 также может быть функционально подключено к портативному компьютеру, планшету, смартфону или карманному персональному компьютеру (КПК) или в некоторых вариантах реализации его можно использовать в автономном режиме, который не требует подключения к другому устройству. Когда устройство 33 подключено таким образом, подключение может быть осуществлено через один или более проводов или беспроводным способом с использованием протокола связи ближнего поля, такого как, помимо прочего, Bluetooth. Данные могут передаваться на настольный компьютер 34, при его наличии, для отображения, распечатывания, сохранения, записи, загрузки и выгрузки, например, в облако.
Кроме того, программа тренировок пользователя может отображаться, распечатываться, сохраняться, загружаться или передаваться через программируемое устройство 33, подключенный компьютер, такой как настольный компьютер 34, и/или другое устройство.
Wattbike Atom 50, показанное на фиг. 4, управляется с помощью программируемого устройства в виде планшета или смартфона (не показан), которое может быть закреплено между крепежными элементами 52а, 52b в передней части рамы 20, выше руля 23. По меньшей мере один из крепежных элементов 52а, 52b является подвижным на элементах, образующих часть рамы 20, по направлению к другому и от другого, чтобы обеспечить возможность зажатия планшета или смартфона между крепежными элементами 52а, 52b. Программируемое устройство функционально связано с измерительным блоком Wattbike Atom™ 50 посредством протокола беспроводной связи.
В случае Wattbike Atom™ 50 данные также могут быть переданы на настольный компьютер для отображения, распечатывания, хранения, записи, загрузки и выгрузки, например, в облако. Аналогично программу тренировок пользователя можно отображать, распечатывать, сохранять, скачивать или передавать через программируемое устройство.
Программируемое устройство как Wattbike® 10, так и Wattbike Atom™ 50 выполнено с возможностью приема данных, относящихся к измерениям движущей силы и связанным с ними временным положениям шатунов 31 педалей.
Двойное воздействие ног пользователя на шатуны 31 педалей, нажатие левой и возвращение правой или нажатие правой и возвращение левой, создает совокупную движущую силу, прилагаемую к бесконечной приводной цепи, которая приводит во вращение маховик(и). Устройство 33 или другое устройство, к которому оно подключено, выполнено с возможностью распределения совокупной движущей силы на шатун 31 левой или правой педали в зависимости от того, какая нога обеспечивает преобладающую долю движущей силы, причем сигналы генерируются датчиком при нахождении шатунов 31 педалей в их положениях верхней мертвой точки и нижней мертвой точки, что означает чередование нагрузки между шатунами 31 левой и правой педалей.
Устройство 33 или другое устройство 33 выполнено с возможностью использования принятых данных для расчета сигналов максимального и минимального коэффициентов пользователя для каждого из шатунов 31 левой и правой педалей.
Максимальный коэффициент пользователя для каждого из шатунов 31 левой и правой педалей рассчитывают в соответствии со следующим уравнением:
 ,
,
где средняя максимальная сила представляет собой среднее значение значений сигнала движущей силы, генерируемых датчиком силы для этого цикла движения в пределах сегмента 45° цикла, в котором генерируемый сигнал максимального значения силы представляет собой среднюю измерительную точку значений движущей силы, измеренных в данном сегменте.
Минимальный коэффициент пользователя для каждого из шатунов 31 левой и правой педалей рассчитывают в соответствии со следующим уравнением:
 ,
,
где средняя минимальная сила представляет собой среднее значение значений сигнала движущей силы, генерируемых датчиком силы для этого цикла движения в пределах сегмента 45° цикла, в котором сигнал минимального значения силы представляет собой среднюю измерительную точку значений сигнала движущей силы, измеренных в данном сегменте.
Как очевидно, сигналы максимального и минимального коэффициентов пользователя генерируются путем сравнения значений сигнала максимальной и «средней максимальной» силы, с одной стороны, и сигналов минимальной и «средней минимальной» силы, с другой стороны, в каждом случае с помощью простого выражения деления, кратко сформулированного.
Такие сравнения могут быть выполнены с помощью одного или более указанных программируемых устройств; однако это не является обязательным. Напротив, как хорошо известно, простое сравнение амплитуды сигналов с делением может быть выполнено с использованием жестко смонтированной схемы, такой как комбинация операционного усилителя и умножителя обратной связи. В такой компоновке, как проиллюстрировано на фиг.5, среднее максимальное или минимальное (в зависимости от обстоятельств) напряжение сигнала может подаваться на инвертирующий вход операционного усилителя 51, неинвертирующий вход которого заземлен.
Выходной сигнал операционного усилителя подается обратно как один входной сигнал на умножитель 52, другой вход которого является максимальным или минимальным (в зависимости от обстоятельств) напряжением сигнала силы. Выходной сигнал умножителя 52 подается на инвертирующий вход операционного усилителя 51. Чистый выходной сигнал представляет собой максимальный или минимальный коэффициент пользователя, умноженный на коэффициент усиления операционного усилителя К. Этот сигнал можно использовать на следующем этапе способа, как описано ниже.
Программируемое или непрограммируемое устройство 33 использует максимальные и минимальные коэффициенты пользователя для расчета оценки эффективности действий пользователя для каждого из шатунов 31 левой и правой педалей в соответствии со следующими уравнениями:


где:
• W представляет собой весовой коэффициент, основанный на соотношении между эффективной силой, прилагаемой к шатунам 31 педалей, и суммарной силой, прилагаемой к шатунам 31 педалей, которая требуется для достижения эффективной силы; и
• М представляет собой коэффициент замедления для определения оценки оптимальной эффективности действий пользователя в диапазоне от 70 до 80.
Простые умножения, такие как указанные в данном документе, может выполнять умножитель, известный в техническом проектировании, в качестве альтернативы использованию программируемого устройства.
Следует понимать, что значения W и М будут варьироваться в зависимости от типа тренажера. В случае Wattbike® 10 и Wattbike Atom™ 50 значение W может находиться в диапазоне от 0,8 до 1,8, а значение М может находиться в диапазоне от -0,5 до -0,05.
Затем программируемое устройство использует оценку эффективности действий пользователя для каждой из кривых 31 левой и правой педалей, чтобы вычислить общую оценку эффективности действий пользователя в соответствии со следующим уравнением:

Такое получение может происходить путем обработки левого и правого сигналов оценки с помощью программируемого устройства или, например, комбинации сумматора операционного усилителя и делителя напряжения.
Программируемое или непрограммируемое устройство содержит дисплей и выполнено с возможностью отображения оценки эффективности действий пользователя.
Программируемое или непрограммируемое устройство также может быть выполнено с возможностью отображения других измеренных характеристик, относящихся к работе пользователя с Wattbike® 10 или Wattbike Atom™ 50.
Программируемое устройство 33 Wattbike® 10, показанное на фиг.3, выполнено с возможностью отображения оценки 38 эффективности действий пользователя, а также информации, относящейся к частоте 39 педалирования, точной выходной мощности пользователя 40, частоте 41 сердечных сокращений, процентным долям выходной мощности правой 42 и левой 43 ног и продолжительности использования 45 Wattbike® 10. Программируемое устройство 33 также выполнено с возможностью отображения на экране измеренной движущей силы относительно временного положения шатунов 31 педалей в виде графика 44 polar view™, такого как polar view™, показанный на фиг. 2 и описанный выше.
Большее или меньшее количество информации может отображаться на программируемом устройстве 33. Информация также может отображаться в компоновках, отличных от проиллюстрированной на фиг. 3. Информацию можно записывать, передавать, скачивать, закачивать, сохранять и распечатывать.
Когда пользователь начинает езду на Wattbike® 10 или Wattbike Atom™ 50, он/она прикладывает движущую силу к педалям 32 и, следовательно, к шатунам 31 педали, толкая их вниз и поднимая их попеременно с правой и левой сторон. Когда каждый шатун 31 педали совершает оборот на 360°, на программируемом устройстве отображается polar view™ (пример которого показан на фиг. 2 и описан выше), указывающий генерируемую силу, и временные положения шатунов 31 педалей отображаются на программируемом устройстве 33. Движущая сила, прилагаемая к шатунам 31 педалей, контролируется и измеряется, и сигналы, указывающие это, генерируются примерно 100 раз в секунду в показанном предпочтительном варианте реализации, хотя в пределах объема данного изобретения возможны и другие частоты дискретизации.
Программируемое или непрограммируемое устройство получает, как описано, сигналы максимального и минимального коэффициентов эффективности действий пользователя для каждого приводного элемента, а затем оценку эффективности действий пользователя для каждого приводного элемента перед использованием оценки эффективности действий пользователя для каждого приводного элемента, чтобы получить общую оценку эффективности действий пользователя в соответствии с уравнениями, приведенными выше.
Оценку эффективности в диапазоне 70-80 рассчитывают, если циклическая работа пользователя на Wattbike® 10 или Wattbike Atom™ 50 находится на уровне оптимальной эффективности или на уровне эффективности, приближенной к оптимальной.
В течение определенного периода контроля генерируется более одного значения оценки эффективности действий пользователя. Эти значения анализируются, и пользователь может модифицировать свою программу тренировок на основании полученных им оценок эффективности.
Программируемое устройство выполнено с возможностью расчета мощности, генерируемой шатунами 31 педалей, и отображения таких значений мощности.
Пользователь может надеть прикрепленный к нагрудному ремню, ремешку на запястье, ремешку на щиколотке или зажиму для пальцев датчик, передающий частоту сердечных сокращений. Эти устройства генерируют значения частоты сердечных сокращений пользователя, которые могут быть переданы на программируемое устройство с помощью различных типов связи ближнего поля. Программируемое устройство 33, показанное на фиг. 3, содержит сегмент 41 дисплея, который отображает преобладающее для текущего момента значение частоты сердечных сокращений.
Значения оценки эффективности действий пользователя, частоты сердечных сокращений, частоты педалирования, времени и мощности, а также данные polar view™ могут быть записаны, отображены, распечатаны, сохранены, скачаны, закачаны или переданы на электронное устройство, такое как компьютер, планшет или смартфон.
Данное изобретение позволяет пользователю тренажера, содержащего пару приводных элементов, приводимых в действие конечностями человека, соединенных для циклического движения, контролировать, оценивать и сравнивать эффективность его/ее техники циклических движений. Данное изобретение обеспечивает точную цифру, которая позволяет пользователю определить, насколько далека техника пользователя от оптимальной эффективности, посредством отображения показателя эффективности. Этот показатель эффективности может отображаться для пользователя в режиме реального времени, обеспечивая непрерывную обратную связь и таким образом содействуя тренировке пользователя. В частности, в случае езды на велосипеде, данное изобретение дает возможность велосипедисту улучшить свою технику педалирования и, в свою очередь, улучшить физическую форму, мощность, выносливость и восстановительные аспекты тренировок и соревнований.
В настоящем описании перечисление или обсуждение ранее опубликованных в явном виде документов не следует обязательно понимать как признание того, что данный документ является частью известного уровня техники или общих знаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАЦИОНАРНЫЙ ЭРГОМЕТРИЧЕСКИЙ ТРЕНАЖЕР | 2017 |
|
RU2729088C1 |
| ЭРГОМЕТРИЧЕСКИЙ ТРЕНАЖЕР | 2008 |
|
RU2472557C2 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| ВЕЛОТРЕНАЖЕР | 1993 |
|
RU2081645C1 |
| УНИВЕРСАЛЬНАЯ ОПОРА ПЛАТФОРМЫ ДЛЯ ВЕЛОТРЕНАЖЕРА И ТРЕНАЖЕРНАЯ СИСТЕМА С СИНХРОННОСТЬЮ С ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2014 |
|
RU2635199C2 |
| ВЕЛОСИПЕД С ЭЛЛИПТИЧЕСКИМ ПРИВОДОМ | 2013 |
|
RU2543134C2 |
| ВЕЛОТРЕНАЖЕР | 2019 |
|
RU2702816C1 |
| ПРИВОД ВЕЛОСИПЕДА С ДЕЗАКСИАЛЬНЫМ КРИВОШИПНО-ПОЛЗУННЫМ МЕХАНИЗМОМ | 2011 |
|
RU2497708C2 |
| СПОСОБ И ВЕЛОТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ В ЭКСЦЕНТРИЧЕСКОМ РЕЖИМЕ С ПРИНУДИТЕЛЬНЫМ ДОЗИРОВАНИЕМ НАГРУЗКИ | 2007 |
|
RU2334536C1 |
| ВЕЛОТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ТАЗОБЕДРЕННЫХ МЫШЦ И СУСТАВОВ | 2024 |
|
RU2838954C1 |

Изобретение относится к способу контроля эффективности действий пользователя во время циклической работы тренажера. Тренажер содержит пару приводных элементов (31, 32), приводимых в действие конечностями человека, соединенных для циклического движения. Способ включает этапы: (i) измерения и контроля движущей силы, прикладываемой к приводным элементам (31, 32) во время циклического движения приводных элементов (31, 32), и генерирования одного или более указывающих это сигналов силы; (ii) применения одного или более сигналов силы для получения для каждого цикла движения приводных элементов (31, 32) по меньшей мере одного сигнала максимального коэффициента эффективности действий пользователя, указывающего изменение силы относительно максимального значения силы, измеренного для этого цикла движения, и по меньшей мере одного сигнала минимального коэффициента эффективности действий пользователя, указывающего изменение силы относительно минимального значения силы, измеренного для этого цикла движения; (iii) применения сигналов максимального и минимального коэффициентов эффективности действий пользователя, полученных на этапе (ii), для генерирования сигнала оценки эффективности действий пользователя, который указывает эффективность действий пользователя в управлении циклическим движением приводных элементов; и (iv) применения сигнала оценки эффективности действий пользователя при записи, отображении, распечатывании, сохранении, загрузке, выгрузке или передаче одного или более показателей, представляющих сигнал оценки эффективности действий пользователя. 2 н. и 31 з.п. ф-лы, 5 ил.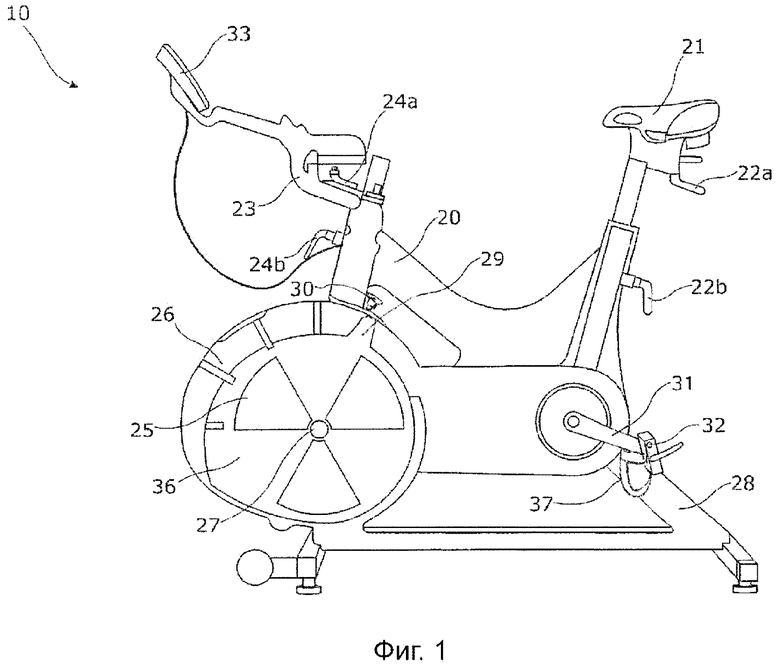
1. Способ контроля эффективности действий пользователя во время циклической работы тренажера, содержащего пару приводных элементов, приводимых в действие конечностями человека, соединенных для циклического движения, причем способ включает в себя этапы:
(i) измерения и контроля движущей силы, прикладываемой к приводным элементам во время циклического движения приводных элементов, и генерирования одного или более указывающих это сигналов силы;
(ii) применения указанного одного или более сигналов силы для получения для каждого цикла движения приводных элементов по меньшей мере одного сигнала максимального коэффициента эффективности действий пользователя, причем сигнал максимального коэффициента эффективности действий пользователя генерируется на основе сравнения амплитуд совокупности периодически генерируемых сигналов силы, генерируемых во время по меньшей мере части цикла движения, с сигналом силы максимальной амплитуды, генерируемым во время по меньшей мере части цикла движения, и по меньшей мере одного сигнала минимального коэффициента эффективности действий пользователя, причем сигнал минимального коэффициента эффективности действий пользователя генерируется на основе сравнения амплитуд совокупности периодически генерируемых сигналов силы, генерируемых во время по меньшей мере части цикла движения, с сигналом силы минимальной амплитуды, генерируемым во время по меньшей мере части указанного цикла движения;
(iii) применения сигналов максимального и минимального коэффициентов эффективности действий пользователя, полученных на этапе (ii), для генерирования сигнала оценки эффективности действий пользователя, который указывает эффективность действий пользователя в управлении циклическим движением приводных элементов; и
(iv) применения сигнала оценки эффективности действий пользователя при записи, отображении, распечатывании, сохранении, загрузке, выгрузке или передаче одного или более показателей, представляющих сигнал оценки эффективности действий пользователя.
2. Способ по п. 1, отличающийся тем, что этап (i) измерения и контроля движущей силы, прилагаемой к приводным элементам, включает периодическое инициирование генерирования одним или более датчиками силы, которые функционально связаны с приводными элементами, одного или более сигналов силы.
3. Способ по п. 1 или 2, отличающийся тем, что один или более датчиков силы измеряют силу, действующую на приводной компонент или в приводном компоненте, который приводится в действие приводными элементами.
4. Способ по п. 3, отличающийся тем, что приводной компонент представляет собой приводную цепь, и один или более датчиков силы измеряют натяжение приводной цепи и генерируют один или более указывающих это сигналов.
5. Способ по любому из пп. 2-4, отличающийся тем, что частота генерирования сигналов силы составляет 100 Гц.
6. Способ по любому из предшествующих пунктов, отличающийся тем, что этап (ii) выполняется в отношении по меньшей мере одного цикла движения, или его части, одного из указанных приводных элементов, на которых указанный приводной элемент обеспечивает преобладающую долю движущей силы.
7. Способ по п. 6, включающий повторение этапа и (ii) в отношении по меньшей мере одного цикла движения, или его части, другого указанного приводного элемента, на которых другой указанный приводной элемент обеспечивает преобладающую долю движущей силы.
8. Способ по любому из предшествующих пунктов, отличающийся тем, что приводные элементы, приводимые в действие конечностями человека, соединены для циклического движения для приведения в действие ходовой части, которая передает или распределяет циклическое усилие.
9. Способ по п. 8, отличающийся тем, что движущая сила, прикладываемая к приводным элементам во время циклического движения приводных элементов, измеряется и контролируется путем измерения силы, генерируемой в ходовой части в по меньшей мере одном месте, и генерирования одного или более указывающих это сигналов.
10. Способ по любому из предшествующих пунктов, отличающийся тем, что приводные элементы выбирают из перечня, содержащего шатуны педалей, шатуны для упражнений для верхней части тела, шатуны шпиля, шатуны брашпиля, весла статического бака или весла гребной лодки.
11. Способ по любому из предшествующих пунктов, дополнительно включающий этап модификации циклической работы приводных элементов на основании оценки эффективности действий пользователя.
12. Способ по любому из предшествующих пунктов, отличающийся тем, что тренажер содержит соответствующую педаль или ручку, которая прикреплена с возможностью вращения к каждому указанному приводному элементу, причем приводные элементы соединены для приведения во вращение приводного колеса, и приводные элементы взаимно образуют угол 180°.
13. Способ по любому из предшествующих пунктов, отличающийся тем, что тренажер представляет собой или содержит статический тренажер.
14. Способ по п. 13, отличающийся тем, что статический тренажер выбирают из перечня, содержащего статический велотренажер, тренажер для верхней части тела или статический бак.
15. Способ по любому из пп. 8-14, отличающийся тем, что ходовая часть приводит в действие вентилятор, который нагнетает воздух в камеру через выпускное отверстие, препятствующее прохождению воздуха, тем самым распределяя циклическое усилие.
16. Способ по п. 15, отличающийся тем, что размеры выпускного отверстия регулируются для обеспечения возможности регулирования степени сопротивления выпускного отверстия прохождению воздуха, причем способ включает этап регулирования размеров выпускного отверстия.
17. Способ по любому из пп. 8-16, отличающийся тем, что ходовая часть содержит магнитный и/или электромагнитный резистор циклического усилия, причем способ включает этап переключения или регулирования циклического сопротивления с помощью магнитного и/или электромагнитного резистора.
18. Способ по любому из пп. 8-17, отличающийся тем, что преобладающая доля циклического усилия пользователя при приведении приводных элементов в циклическое движение чередуется между левой и правой конечностями один раз на цикл движения приводных элементов, этап (i) включает присваивание значений сигнала движущей силы, измеренных во время цикла движения, одному или другому из приводных элементов на основании точек чередования нагрузки во время цикла движения, этап (ii) включает получение сигналов максимального и минимального коэффициентов эффективности действий пользователя для каждого приводного элемента, и этап (iii) включает применение сигналов максимального и минимального коэффициентов эффективности действий пользователя для каждого приводного элемента на этапе (ii) для генерирования сигнала оценки эффективности действий пользователя, полученного для каждого приводного элемента, перед генерированием сигнала общей оценки эффективности действий пользователя на основании среднего значений сигналов оценки эффективности действий пользователя, сгенерированных для каждого приводного элемента.
19. Способ по любому из предшествующих пунктов, отличающийся тем, что этап генерирования сигнала оценки эффективности действий пользователя на этапе (ш) дополнительно включает применение предварительно определенного весового коэффициента с сигналами максимального и минимального коэффициентов эффективности действий пользователя, рассчитанными на этапе (ii), причем весовой коэффициент основывается на соотношении для тренажера между эффективной силой, приложенной к приводным элементам, и суммарной силой, приложенной к приводным элементам и требуемой для достижения эффективной силы.
20. Способ по любому из предшествующих пунктов, отличающийся тем, что этап генерирования оценки эффективности действий пользователя на этапе (iii) дополнительно включает применение предварительно определенного коэффициента замедления, чтобы оценка эффективности действий пользователя для каждого приводного элемента находилась в оптимальном диапазоне от 70 до 80.
21. Способ по любому из предшествующих пунктов, отличающийся тем, что:
сигнал максимального коэффициента эффективности действий пользователя рассчитывают следующим образом:
 ,
,
где средняя максимальная сила представляет собой среднее значение значений сигнала движущей силы, измеренных для этого цикла движения в пределах предварительно определенного сегмента цикла, в котором максимальное значение силы представляет собой среднюю измерительную точку значений сигнала движущей силы, измеренных в данном сегменте; и
сигнал минимального коэффициента эффективности действий пользователя может быть рассчитан следующим образом:
 ,
,
где средняя минимальная сила представляет собой среднее значение значений сигнала движущей силы, генерируемых датчиком силы для этого цикла движения в пределах предварительно определенного сегмента цикла, в котором минимальное значение силы представляет собой среднюю измерительную точку значений сигнала движущей силы, измеренных в данном сегменте.
22. Способ по п. 21, отличающийся тем, что этап (i) включает запись измеренных значений сигнала силы относительно угловых положений вращения приводного колеса, а средняя максимальная сила и средняя минимальная сила сигналов определяются на основании значений силы, измеренных в пределах сегментов 45°.
23. Способ по п. 22, дополнительно включающий этап генерирования polar view™, показывающего движущую силу, прилагаемую к приводным элементам, когда она распределяется между приводными элементами для каждого цикла движения.
24. Способ по любому из пп. 8-23, отличающийся тем, что ходовая часть содержит ось, а этап (i) включает измерение значения крутящего момента в оси и генерирование одного или более указывающих это сигналов.
25. Способ по любому из предшествующих пунктов, включающий генерирование совокупности показателей, представляющих оценку эффективности действий пользователя в течение периода контроля, причем способ включает этап анализа сигналов оценки эффективности и обнаружения изменений в значениях сигнала оценки эффективности в течение периода контроля.
26. Способ по любому из предшествующих пунктов, дополнительно включающий этап записи, передачи, загрузки, выгрузки, сохранения, распечатывания или отображения сигналов данных, указывающих применение тренажера.
27. Способ по любому из предшествующих пунктов, включающий отображение, распечатывание, сохранение, загрузку или передачу программы тренировок пользователя.
28. Способ по п. 27, дополнительно включающий этап модификации программы тренировок пользователя на основании оценки эффективности действий пользователя для одного или более циклов движения приводных элементов.
29. Способ по любому из предшествующих пунктов, включающий применение программируемого устройства для генерирования оценки эффективности действий пользователя.
30. Способ по п. 29, отличающийся тем, что программируемое устройство содержит дисплей и функционально связано с тренажером.
31. Тренажер, содержащий пару приводных элементов, приводимых в действие конечностями человека, соединенных для циклического движения, и электронное устройство, содержащее по меньшей мере один сенсорный индикатор, функционально связанный с тренажером, причем тренажер и электронное устройство генерирует указанную оценку эффективности действий пользователя путем выполнения способа по любому из предшествующих пунктов и вывода оценки эффективности действий пользователя через сенсорный индикатор.
32. Тренажер по п. 31, отличающийся тем, что электронное устройство выбирают из списка, содержащего портативный компьютер или настольный компьютер, так называемый «планшет», смартфон, карманный персональный компьютер (КПК) или монитор, являющийся частью тренажера.
33. Тренажер по п. 31 или 32, выполненный в виде статического велотренажера, содержащего соответствующую педаль, прикрепленную с возможностью вращения к каждому приводному элементу.
| US 2014060212 A1, 06.03.2014 | |||
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ВЕЛОСИПЕДИСТОВ | 2009 |
|
RU2411980C1 |
| ЭРГОМЕТР | 2003 |
|
RU2231382C1 |
| US 4463433 A, 31.07.1984 | |||
| DE 4435174 A1, 21.03.1996 | |||
| US 2011082397 A1, 07.04.2011. | |||

