Предлагаемое оптическое сенсорное устройство с измерением скорости относится к технике оптических Touch-панелей, широко применяемых в торговле, электронных платежных системах, в персональных компьютерах.
Известен ряд устройств подобного назначения. Например, в патенте США №7006236 B2 от 28.02.2006 г. [1] предлагается устройство, создающее виртуальную сенсорную поверхность, касание которой в определенных местах эквивалентно нажатию кнопок. Данное устройство содержит телевизионную камеру, оптически сопряженный с ней источник структурированного освещения и вычислительное устройство. Введение пальца в создаваемый источником структурированного освещения поток, регистрируется телевизионной камерой. Вычислительное устройство обрабатывает видеоинформацию, поступающую с телевизионной камеры, и определяет координаты точки касания пальца с потоком структурированного излучения. В устройствах, предложенных в патентах США №6480187 от 12.11.2002 г. [2], №6492633 от 10.12.2002 г. [3], №6844539 от 18.01.2005 г. [4], №7522156 от 21.04.2009 г. [5], используются отражатель и два приемопередающих оптических модуля. При появлении на пути потоков, формируемых излучателями, входящими в состав приемо-передающих модулей пальца (стилуса), специализированный вычислитель с помощью фотоприемников, входящих в состав приемо-передающих модулей, регистрирует угловые координаты пальца (стилуса).
Известно устройство для интерактивной локализации объектов [6], содержащее два излучателя и оптически сопряженный с ним приемник излучения, выполненный в виде линейчатого, содержащего множество фоточувствительных элементов, расположенных вдоль линии, охватывающей часть периметра «виртуальной клавиатуры», при этом пересечение потоков, формируемых излучателями на поверхности приемника излучения обеспечивает создание виртуальной клавиатуры, а вычислительное устройство поочередно включает один из двух излучателей и определяет координаты объекта. Это устройство наиболее близко по функциональной схеме к предлагаемому и является его прототипом.
К его недостаткам можно отнести непрямоугольную форму сенсорной поверхности («виртуальной клавиатуры»), а также неэффективное использование оптических потоков, формируемых обоими излучателями, при котором в создании сенсорной поверхности используется лишь часть их излучений.
Целью предлагаемого изобретения является увеличение размера сенсорной поверхности, повышение функциональных возможностей, связанных с легкой подгонкой сенсорной поверхности под требуемый размер и возможностью измерения скорости касания с сенсорной поверхностью.
Для этого предлагается оптическое сенсорное устройство с измерением скорости, содержащее два излучателя и оптически сопряженный с ним первый линейчатый приемник излучения, содержащий множество фоточувствительных элементов, выстроенных вдоль одной линии, вычислитель, первый и второй выходы которого подключены к первому и второму излучателям, а вход к выходу первого линейчатого приемника излучения, отличающееся тем, что в него дополнительно введены третий и четвертый излучатели, подключенные к третьему и четвертому выходам вычислителя и второй линейчатый приемник излучения, оптически сопряженный с третьим и четвертым излучателями, причем третий и четвертый излучатели расположены так, что находятся в непосредственной близости с первым и последним фоточувствительными элементами первого линейчатого приемника излучения, а первый и второй излучатели расположены так, что находятся в непосредственной близости с первым и последним фоточувствительными элементами второго линейчатого приемника излучения. При этом сенсорная поверхность формируется из четырех зон, представленных попарным пересечением оптических потоков четырех излучателей. Таким образом, по сравнению с прототипом, в котором сенсорная поверхность образуется пересечением оптических потоков двух излучателей, имеет место существенное увеличение размера сенсорной поверхности. Кроме того, увеличение расстояния между первым и вторым линейчатыми приемниками не влияет на попарное пересечение оптических потоков излучателей, оптически сопряженных с соответствующими линейчатыми приемниками. Это свойство позволяет осуществлять увеличение размера сенсорной поверхности, раздвигая первый и второй линейчатые приемники относительно друг друга.
Ввод пальца пользователя в одну из четырех зон вызывает появление теней на одном либо на обоих линейчатых приемниках излучения. Вычислитель вводит сигналы с выходов первого и второго линейчатых приемников излучения и определяет по их значениям координаты пальца.
Кроме того, для измерения скорости, с которой палец касается сенсорной поверхности, устройство дополнительно содержит четыре излучателя, оптически сопряженных с первым и вторым ленточными приемниками излучения, либо дополнительно содержит третий и четвертый линейчатые приемники излучения, оптически сопряженные с первыми четырьмя излучателями.
Для повышения точности измерений третий и четвертый линейчатые приемники излучения могут быть размещены так, что входящие в их состав фотоприемники (фототранзисторы или фотодиоды) сдвинуты относительно фотоприемников, входящих в состав первого и второго линейчатого приемника, на величину, равную половине межцентрового расстояния между фотоприемниками.
Дополнительно в состав устройства могут входить наборы последовательно включенных трансимпедансного усилителя, усилителя с регулируемым усилением, полосового фильтра и демодулятора.
При этом вход каждого набора подключен к одному из фотоприемников ленточного приемника излучения, а выходы всех наборов образуют шину данных, подключенную к соответствующему входу специализированного вычислителя. Кроме того, специализированный вычислитель на своем первом, втором, третьем и четвертом выходах поочередно формирует пачки импульсов с частотой заполнения, равной центральной частоте полосовых фильтров. Таким образом, достигается значительное повышение помехоустойчивости, т.к. устройство перестает реагировать на засветки и прочие паразитные оптические сигналы.
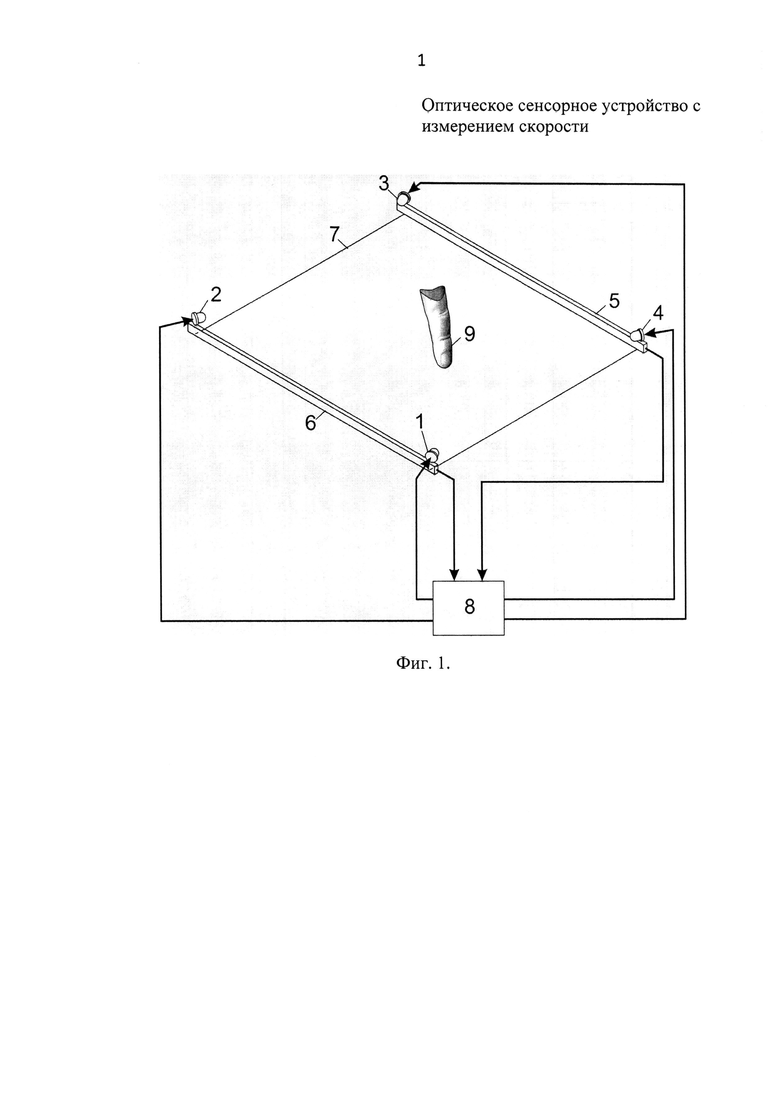
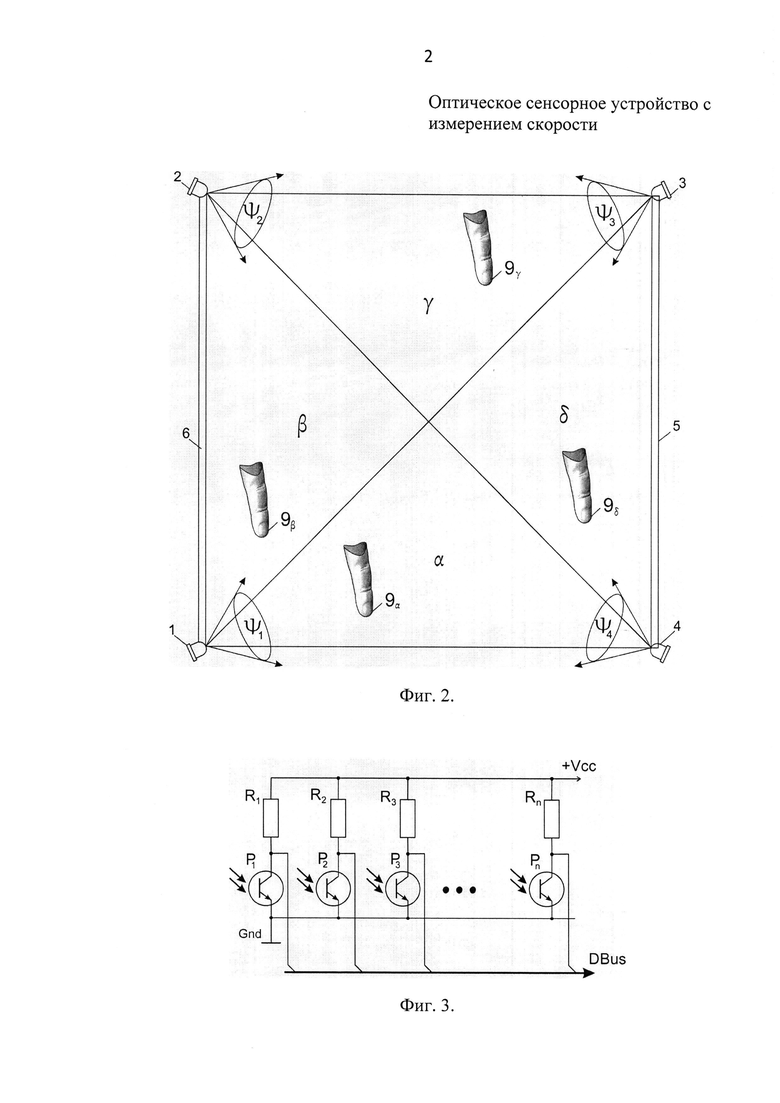
На фиг. 1 приведена функциональная схема предлагаемого устройства, где:
1, 2, 3, 4 - первый, второй, третий, четвертый излучатели соответственно,
5, 6 - первый и второй линейчатые приемники излучения,
7 - сенсорная поверхность,
8 - специализированный вычислитель,
9 - палец оператора.
На фиг. 2 приведена схема разбиения сенсорной поверхности 7 на 4 зоны, где: α, β, γ, δ - зоны сенсорной поверхности 7,
9α - палец 9 оператора в зоне α,
9β - палец 9 оператора в зоне β,
9γ - палец 9 оператора в зоне γ,
9δ - палец 9 оператора в зоне δ,
ψ1, ψ2, ψ3, ψ4 - оптические потоки 1, 2, 3, 4-го излучателей.
На фиг. 3 приведен пример электрической схемы линейного фотоприемника, где:
P1 … Pn - фототранзисторы,
DBus - шина данных.
На фиг. 4 приведен пример практического исполнения линейчатого приемника излучения, где: РСВ - печатная плата.
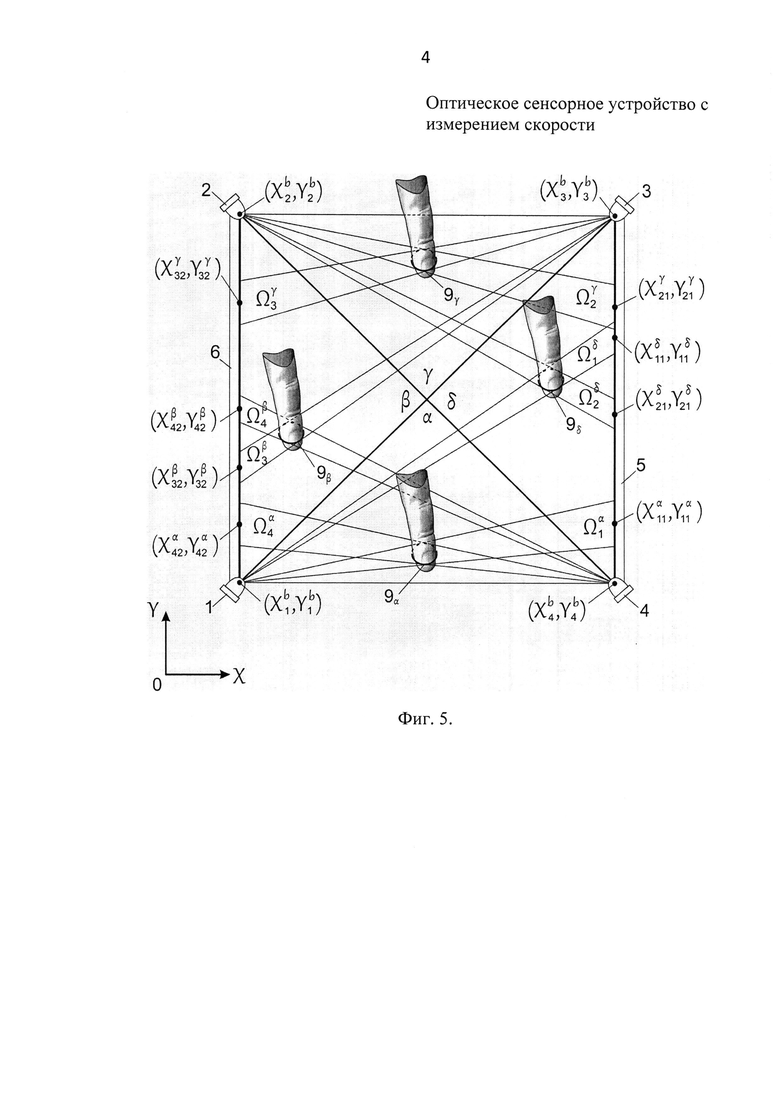
На фиг. 5 приведена оптико-геометрическая схема формирования теневых сегментов, где:
 - теневые сегменты, образуемые пальцем 9,
- теневые сегменты, образуемые пальцем 9,
0XY - система координат,

 - координаты центров теней на поверхностях линейчатых приемников излучения,
- координаты центров теней на поверхностях линейчатых приемников излучения,
 - координаты оптических центров излучателей.
- координаты оптических центров излучателей.
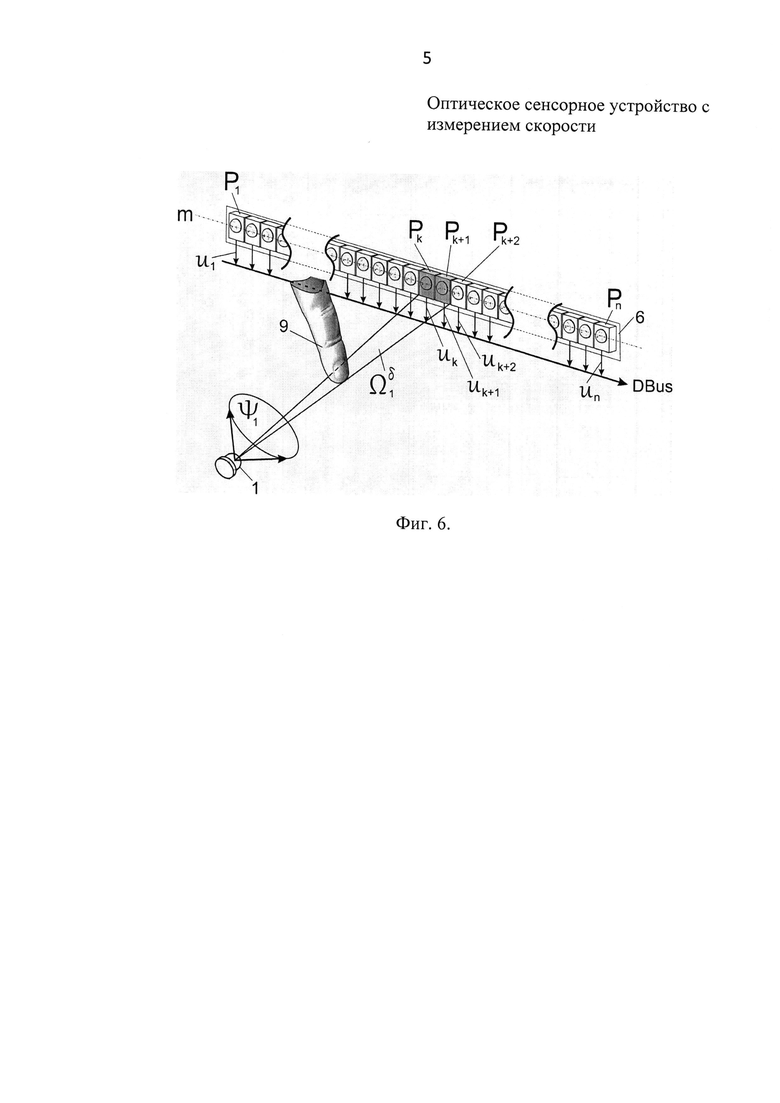
На фиг. 6 приведен пример формирования выходных сигналов фотоприемников, где:
u1…un - сигналы фототранзисторов P1…Pn,
m - осевая оптическая линия линейчатого приемника излучения.
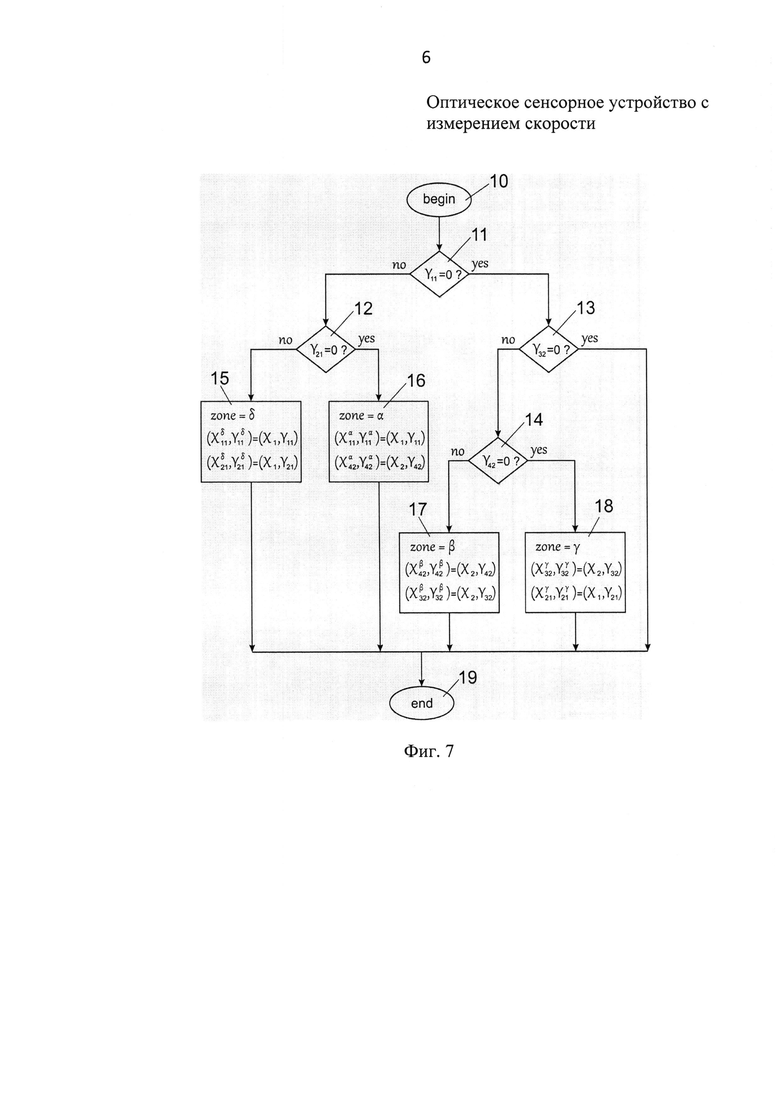
На фиг. 7 приведен алгоритм определения зоны нахождения пальца на поверхности 7.
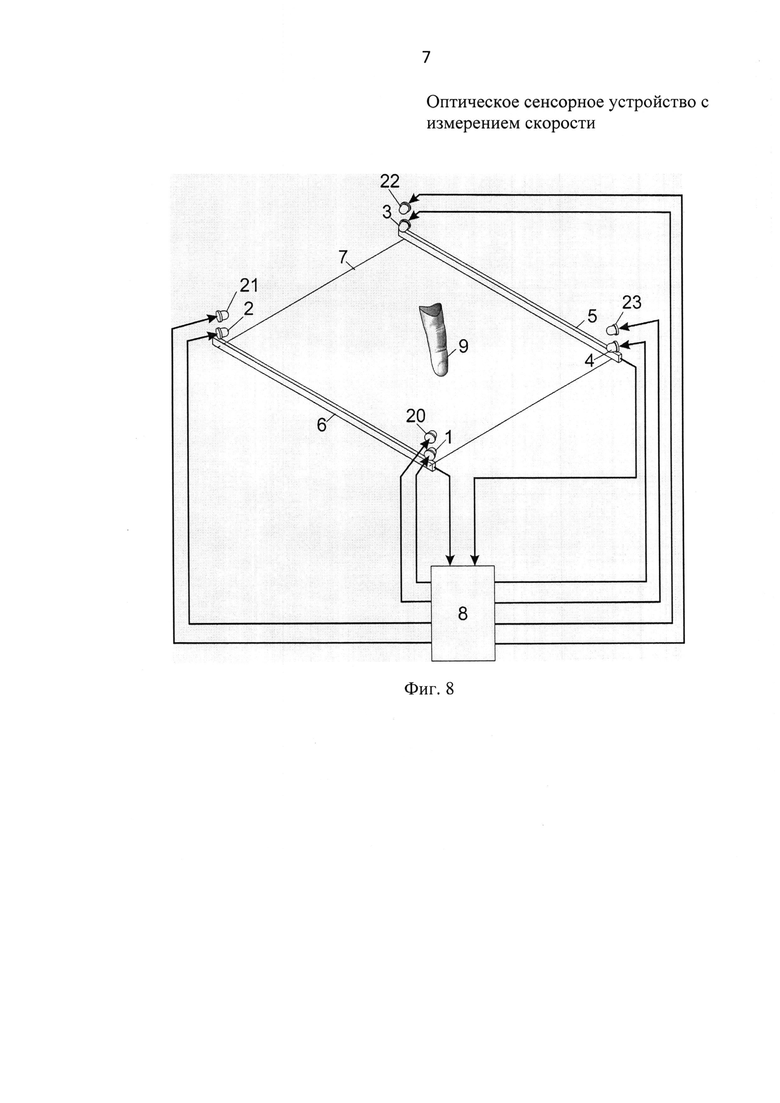
На фиг. 8 приведена функциональная схем устройства, соответствующего 2-му пункту формулы изобретения, где:
20, 21, 22, 23 - пятый, шестой, седьмой и восьмой излучатели.
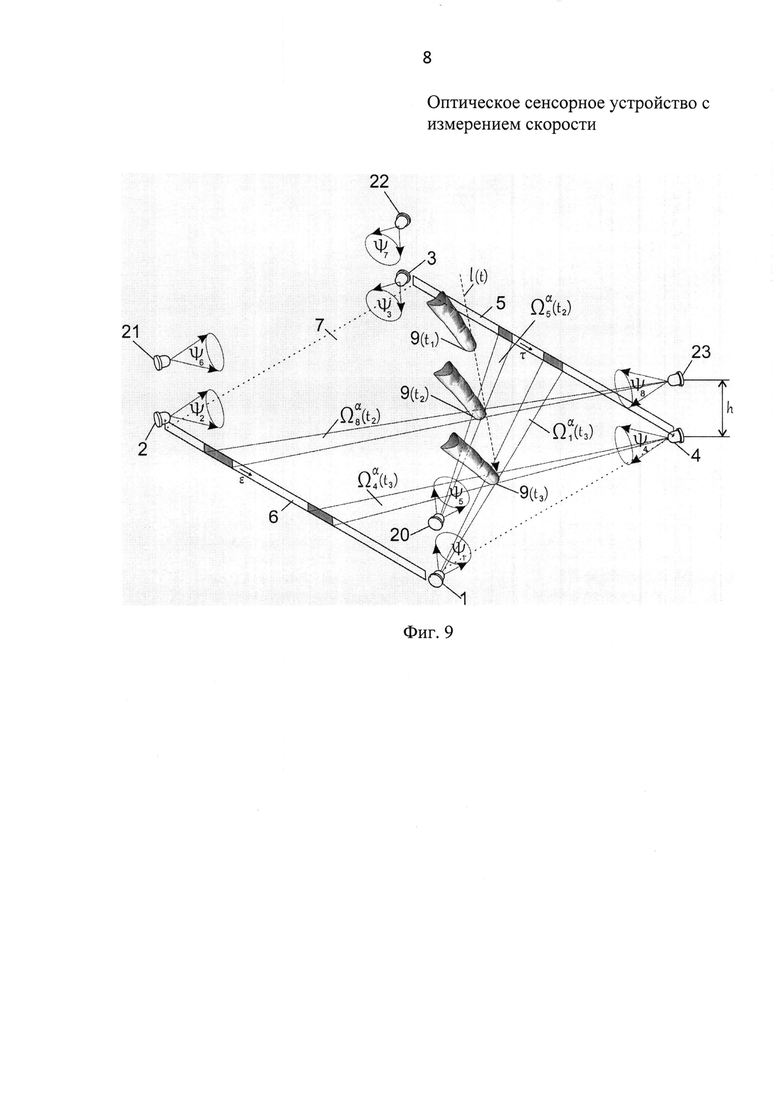
На фиг. 9 приведена оптико-геометрическая схема измерения для устройства, выполненного по 2-му пункту формулы изобретения, где:
Ψ5, Ψ6, Ψ7, Ψ8 - оптические потоки пятого, шестого, седьмого и восьмого излучателей,
 - теневые сегменты, образуемые пальцем 9,
- теневые сегменты, образуемые пальцем 9,
l(t) - траектория движения пальца 5,
9(t1), 9(t2), 9(t3) - положения пальца 5 в моменты времени t1, t2, t3.
ε, τ - вектора сдвига,
h - расстояние между оптическими центрами 1 и 5-го, 2 и 6-го, 3 и 7-го, 4 и 8-го линейчатых приемников излучения.
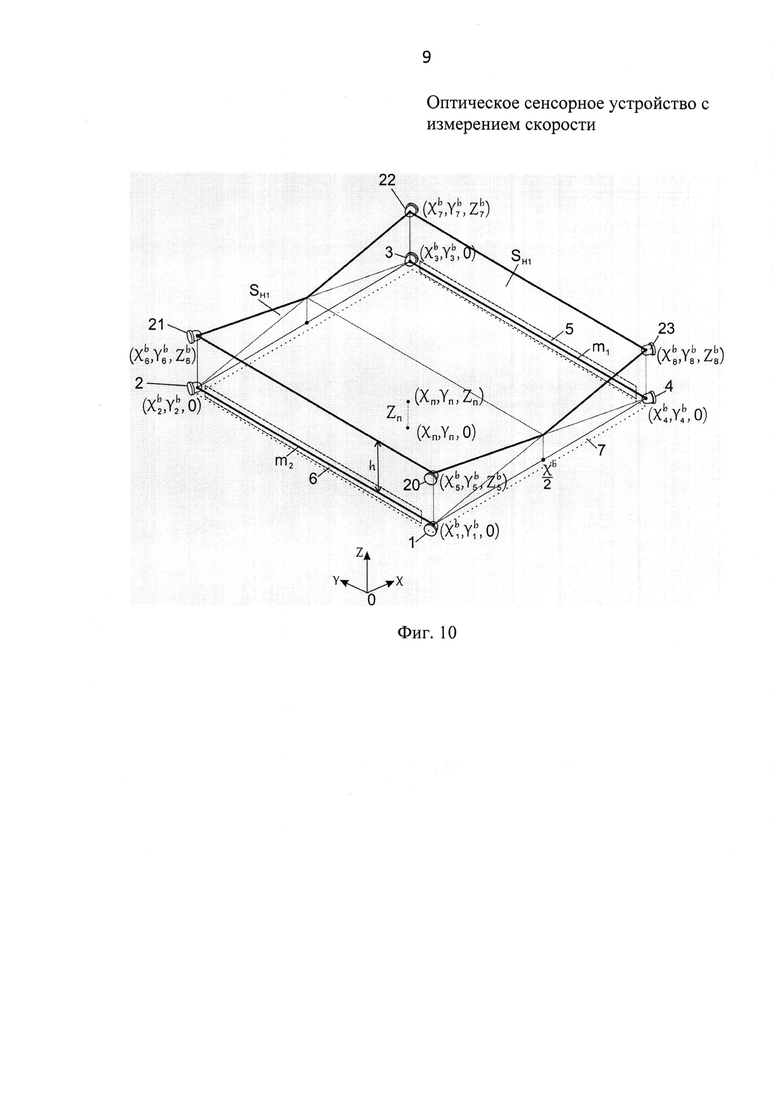
На фиг. 10 приведена геометрическая схема образования «верхней сенсорной поверхности» для устройства, выполненного по 2-му пункту формулы изобретения.
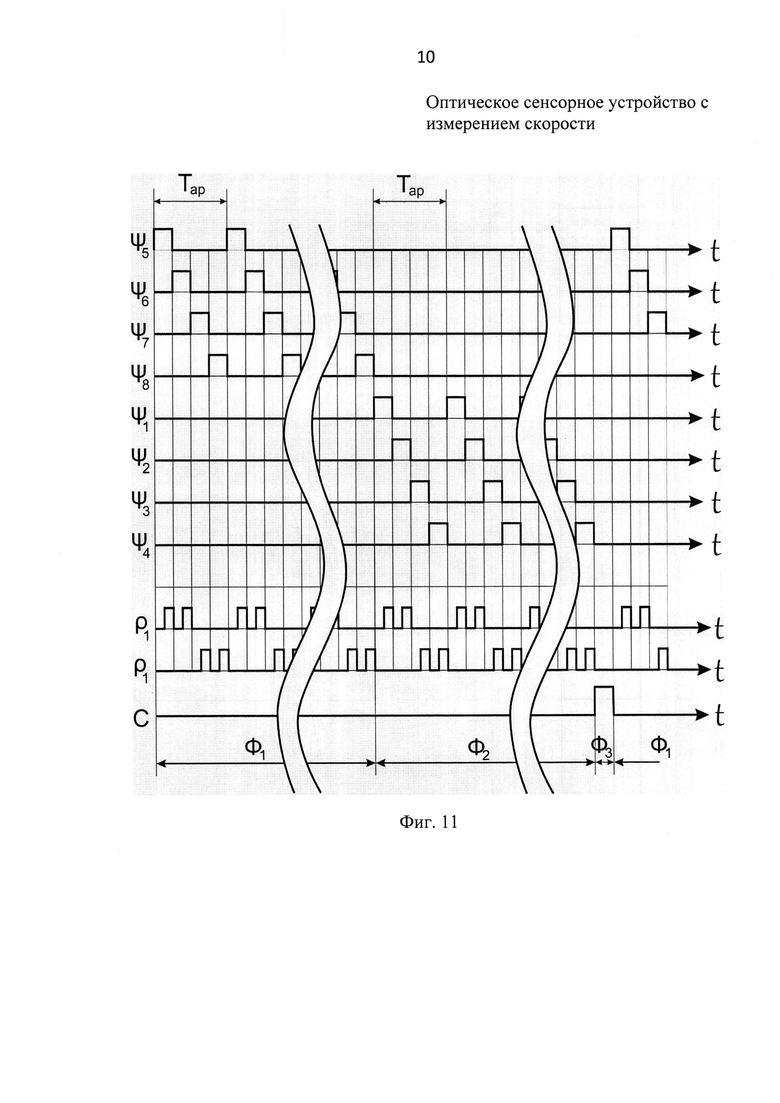
На фиг. 11 приведена временная диаграмма работы устройства, выполненного по 2-му пункту формулы изобретения.
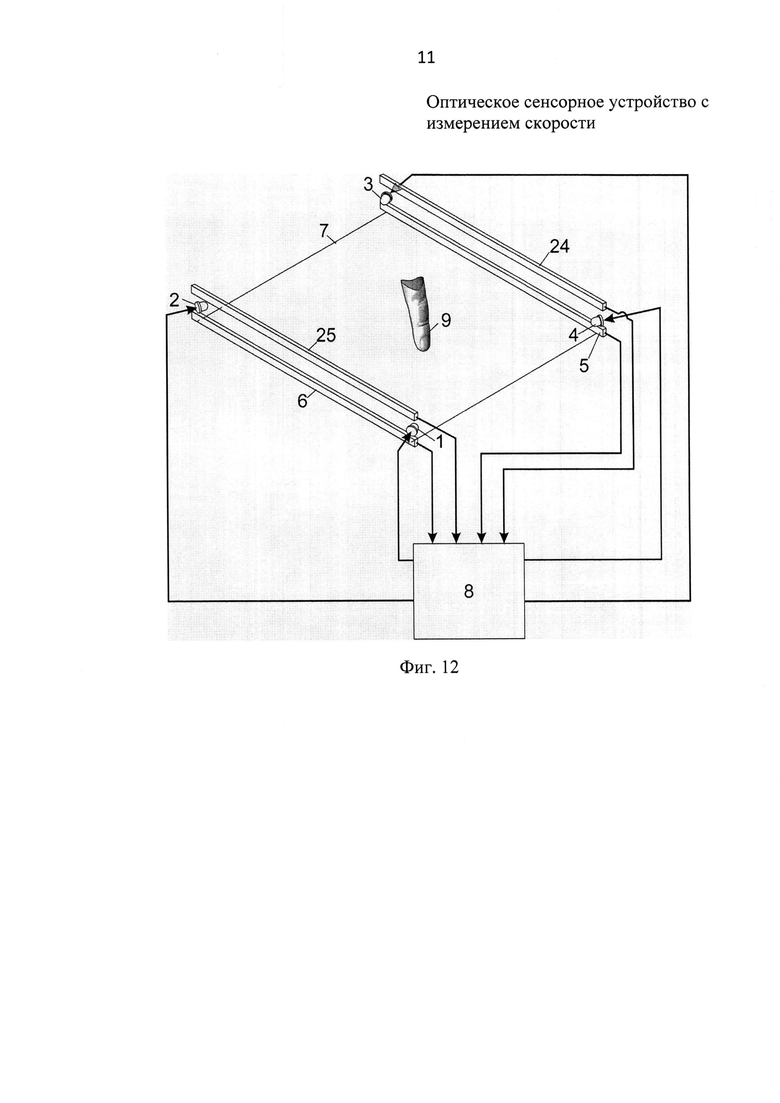
На фиг. 12 приведена функциональная схем устройства, соответствующего 3-му пункту формулы изобретения, где:
24, 25 - 3 и 4-й линейчатые приемники излучения.
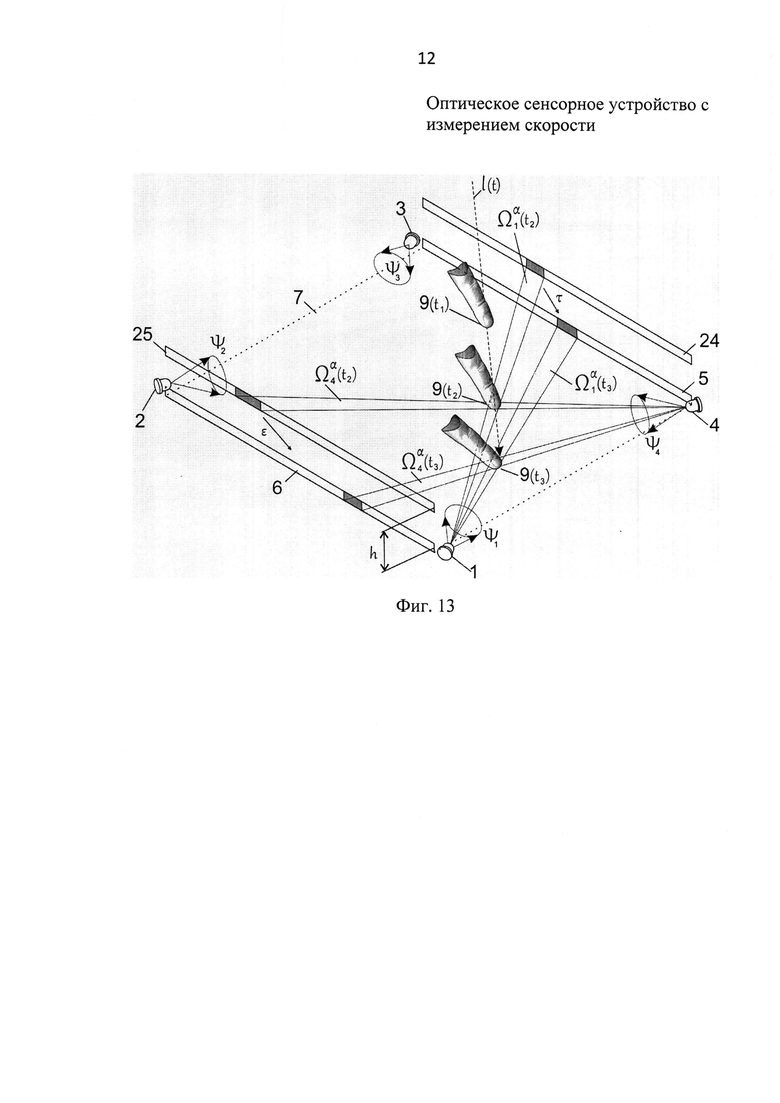
На фиг. 13 приведена оптико-геометрическая схемы измерения для устройства, выполненного по 3-му пункту формулы изобретения, где:
 , - теневые сегменты, образуемые пальцем 9.
, - теневые сегменты, образуемые пальцем 9.
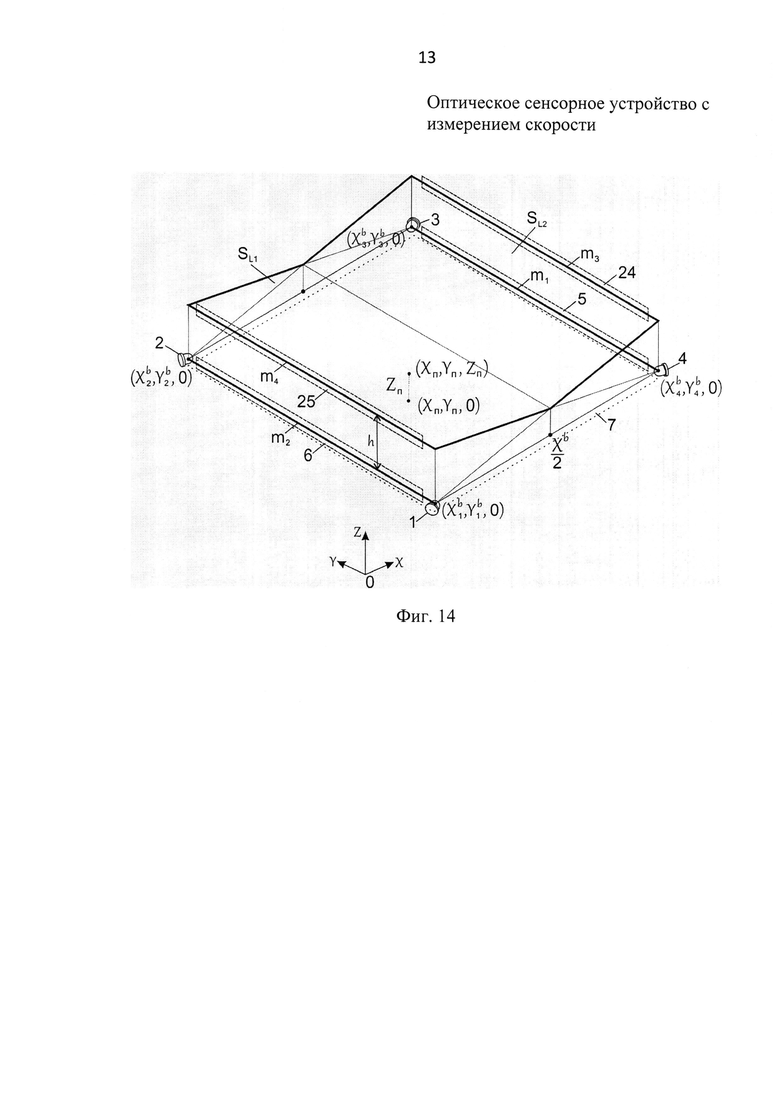
На фиг. 14 приведена геометрическая схема образования «верхней сенсорной поверхности» для устройства, выполненного по 3-му пункту формулы изобретения.
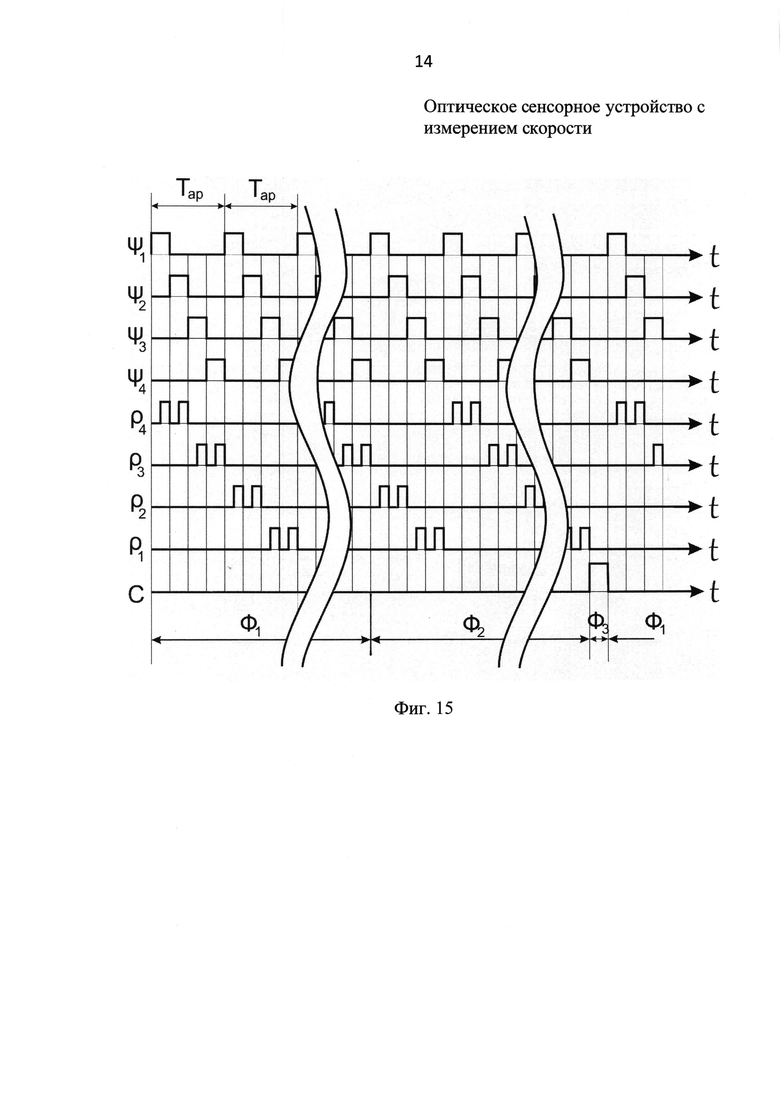
На фиг. 15 приведена временная диаграмма работы устройства, выполненного по 3-му пункту формулы изобретения.
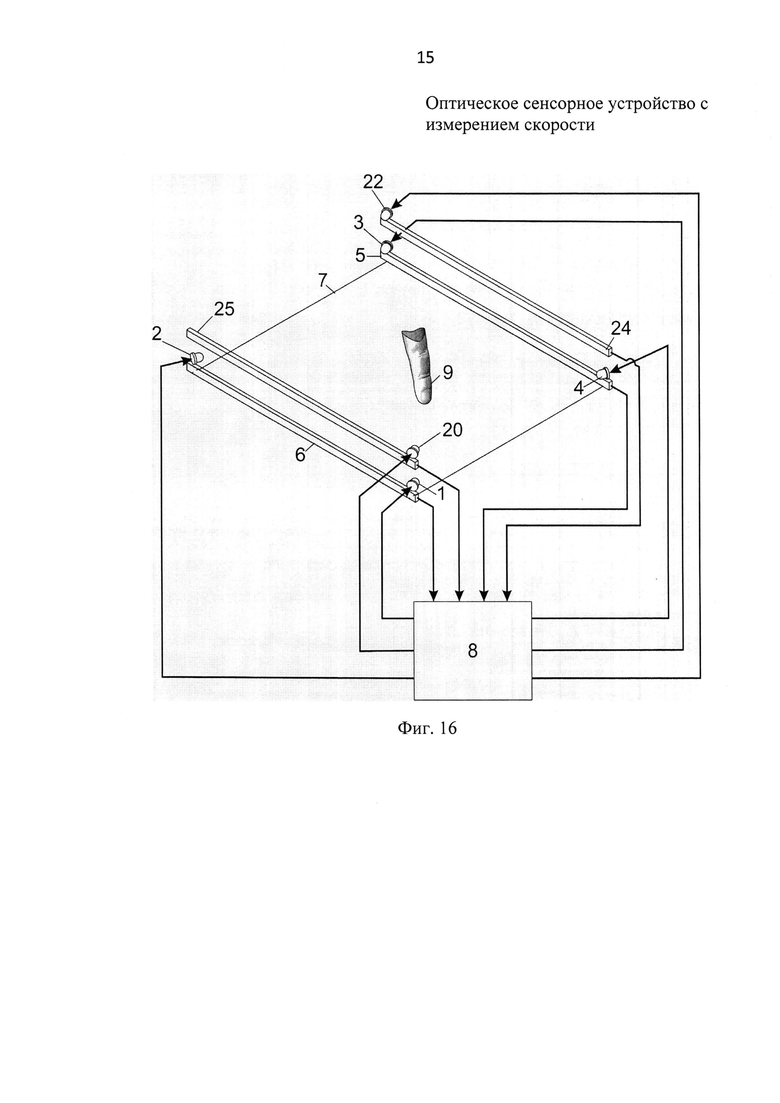
На фиг. 16 приведена функциональная схем устройства, выполненного по 4-му пункту формулы изобретения.
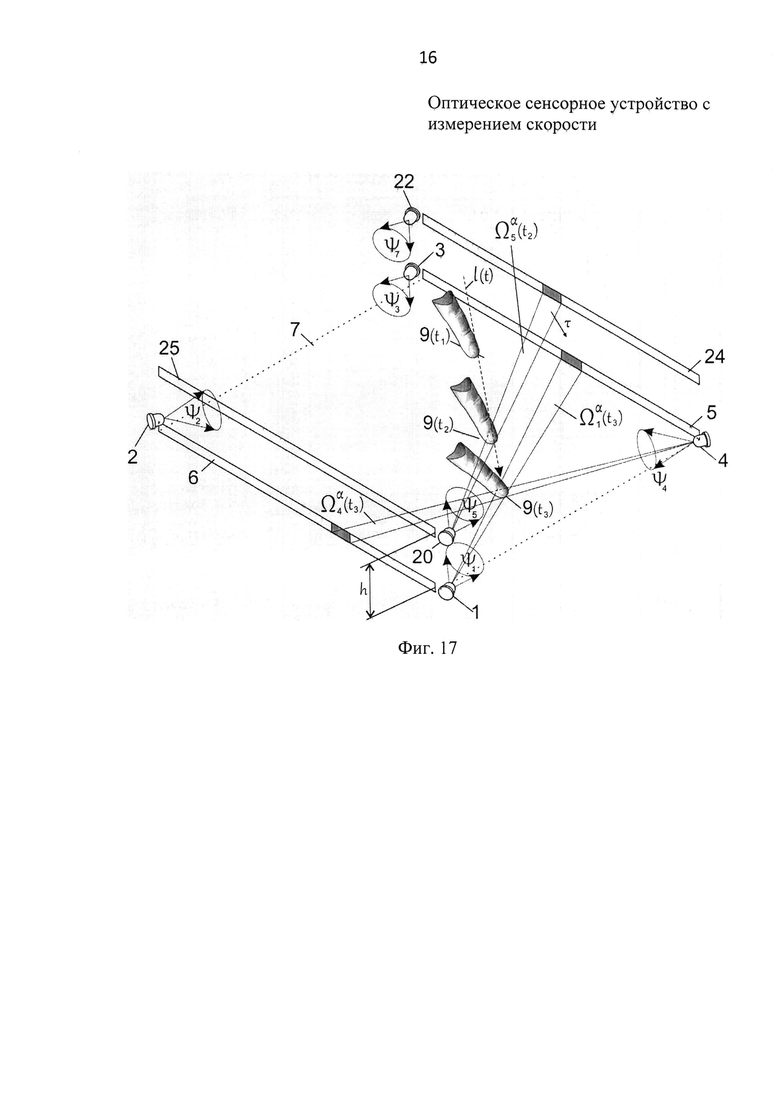
На фиг. 17 приведена оптико-геометрическая схема измерения для устройства, выполненного по 4-му пункту формулы изобретения.
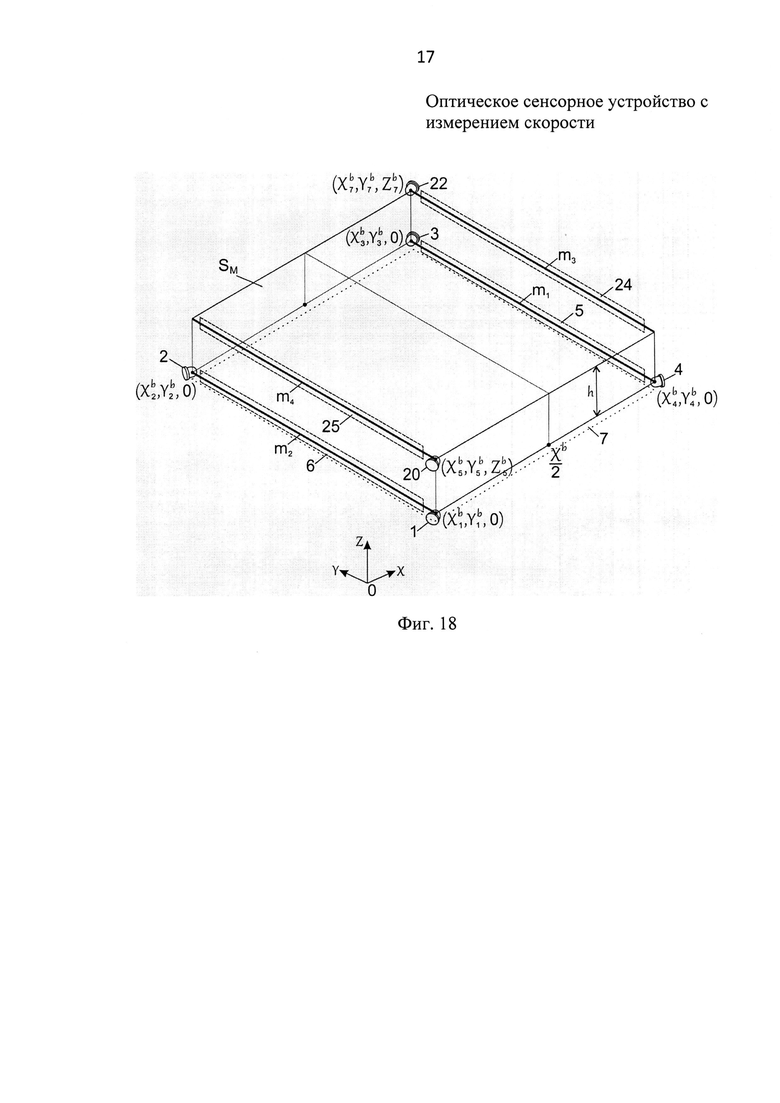
На фиг. 18 приведена геометрическая схема образования «верхней сенсорной поверхности» для устройства, выполненного по 4-му пункту формулы изобретения.
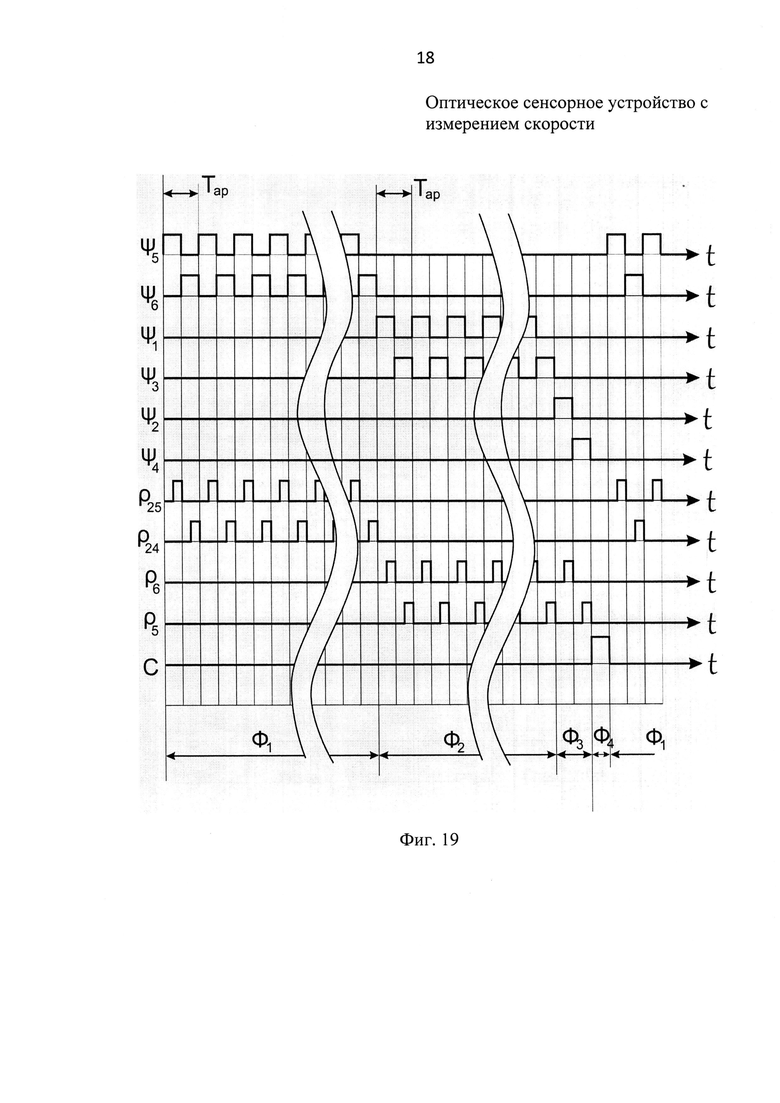
На фиг. 19 приведена временная диаграмма работы устройства, выполненного по 4-му пункту формулы изобретения.
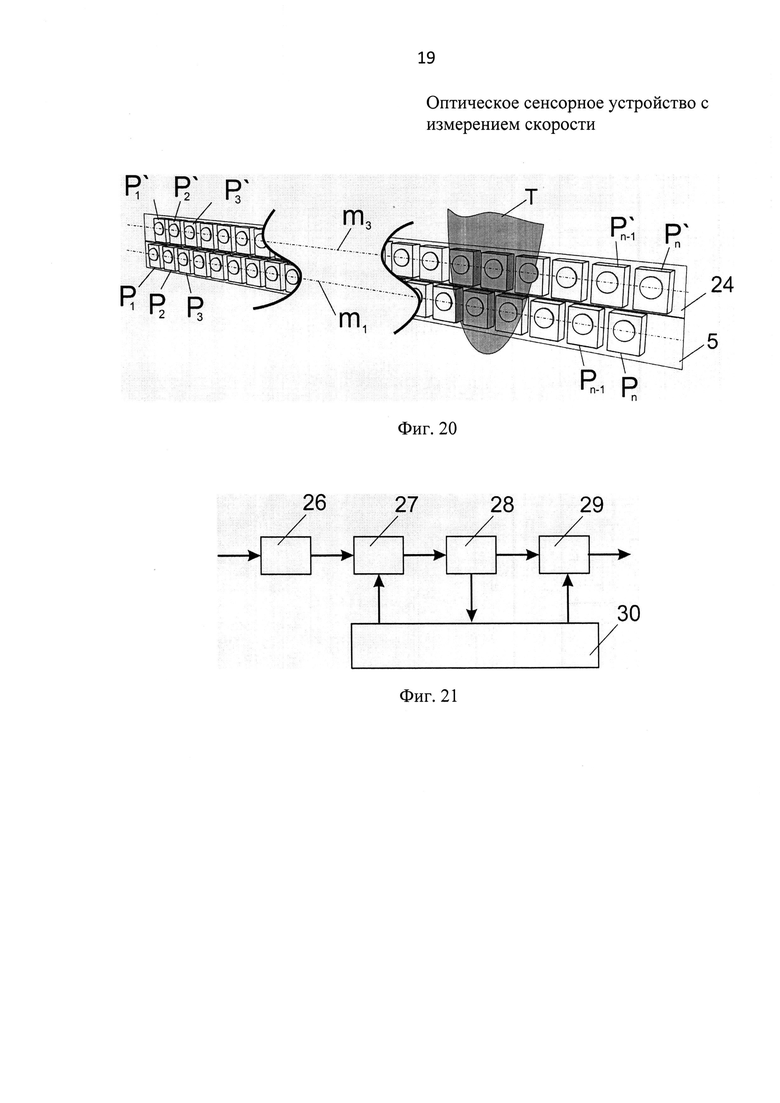
На фиг. 20 приведена геометрическая схема взаимного расположения линейчатых приемников излучения для устройства, выполненного по 5-му пункту формулы изобретения.
На фиг. 21 приведена функциональная схема обработки сигналов фотоприемников для устройства, выполненного по 6-му пункту формулы изобретения, где:
26 - трансимпедансный усилитель,
27 - усилитель с регулируемым усилением,
28 - полосовой фильтр,
29 - демодулятор,
30 - цепь управления.
Работа устройства, функциональная схема которого приведена на фиг. 1, осуществляется следующим образом.
Специализированный вычислитель 7 поочередно включает один из четырех излучателей 1, 2, 3, 4. При этом на их выходах формируются оптические потоки Ψ1, Ψ2, Ψ3, Ψ4, как изображено на фиг. 2. Эти потоки падают на поверхности первого и второго линейчатых приемников излучения 5 и 6 и регистрируются входящими в их состав фототранзисторами или фотодиодами и вводятся в память специализированного вычислителя 8. На фиг. 3 приведена электрическая схема выполнения линейчатых фотоприемников 5 и 6, а на фиг. 4 пример ее конструктивного исполнения. Необходимым условием применяемых там элементов P1…Pn является их достаточно широкий угол обзора в плоскости 7, требуемый для приема излучений от оптически сопряженных к соответствующему линейчатому приемнику излучателей 1, 2, 3, 4. Сигналы, снимаемые с выходов P1…Pn, образуют сигнальную шину данных - DBus, поступающую на соответствующий вход специализированного вычислителя 8.
При формировании оптических потоков Ψ1, Ψ2 специализированный вычислитель 8, вводит состояние 1-го линейчатого приемника излучения 5, а при формировании оптических потоков Ψ3, Ψ4 - состояние 2-го линейчатого приемника излучения 6. Таким образом, если палец 9 коснулся сенсорной поверхности 7, он встает на пути какой-либо пары излучений Ψ1, Ψ2, Ψ3 Ψ4, падающих на поверхности линейчатых приемников излучения. При этом на их поверхностях появляются тени, координаты которых фиксируются специализированным вычислителем 8. Далее по их значениям специализированный вычислитель 8 определяет относительные координаты кончика пальца, контактирующего с сенсорной поверхностью 7. Обозначим:
P(Ψi) - прямоугольная проекция потока Ψi на сенсорную поверхность 7,
P(Ψi)∩P(Ψj) - пересечение проекций Р(Ψi) и P(Ψj).
Из фиг. 2 видно, что сенсорная поверхность 7 разбивается на четыре зоны - α, β, γ, δ.
При этом:
На фиг. 5 показано образование теневых сегментов при касании пальцем 9 сенсорной поверхности 7.
Видно, что:
- теневой сегмент  образуется пальцем 9, находящимся в зоне α, при действии оптического потока Ψ1,
образуется пальцем 9, находящимся в зоне α, при действии оптического потока Ψ1,
- теневой сегмент  образуется пальцем 9, находящимся в зоне 8, при действии оптического потока Ψ1,
образуется пальцем 9, находящимся в зоне 8, при действии оптического потока Ψ1,
- теневой сегмент  образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ2,
образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ2,
- теневой сегмент  образуется пальцем 9, находящимся в зоне δ, при действии оптического потока Ψ2,
образуется пальцем 9, находящимся в зоне δ, при действии оптического потока Ψ2,
- теневой сегмент  образуется пальцем 9, находящимся в зоне β, при действии оптического потока Ψ3,
образуется пальцем 9, находящимся в зоне β, при действии оптического потока Ψ3,
- теневой сегмент  образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ3,
образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ3,
- теневой сегмент  образуется пальцем 9, находящимся в зоне β, при действии оптического потока Ψ4,
образуется пальцем 9, находящимся в зоне β, при действии оптического потока Ψ4,
- теневой сегмент  образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ4.
образуется пальцем 9, находящимся в зоне γ, при действии оптического потока Ψ4.
Координаты центров теней, формируемых теневыми сегментами на поверхностях линейчатых фотоприемников, при касании пальцем сенсорной поверхности 7 в зонах α, β, γ, δ имеют вид:
 - координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
- координата центра тени, формируемой четвертым излучателем на поверхности второго линейчатого приемника излучения 6,
 - координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 5,
- координата центра тени, формируемой третьим излучателем на поверхности второго линейчатого приемника излучения 5,
 - координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 5,
- координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 5,
 - координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6,
- координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6,
 - координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 6,
- координата центра тени, формируемой вторым излучателем на поверхности первого линейчатого приемника излучения 6,
 - координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6.
- координата центра тени, формируемой первым излучателем на поверхности первого линейчатого приемника излучения 6.
Координаты оптических центров:
 - первого излучателя,
- первого излучателя,
 - второго излучателя,
- второго излучателя,
 - третьего излучателя,
- третьего излучателя,
 - четвертого излучателя.
- четвертого излучателя.
Фиг. 6 иллюстрирует пример формирования выходных сигналов фототранзисторов P1…Pn при включенном 1-м излучателе и теневом сегменте  .
.
При этом сигналы u1…un имеют значения:
u1=1,…uk-2=1, uk-1=1, uk=0, uk+1=0, uk+2=1, … un=1.
На фиг. 7 приведен алгоритм определения того, в какой из зон сенсорного поля 7, находится палец 9. Учитывая, что X - координата центров теней на первом и втором линейчатых приемников излучения, при условии их перпендикулярности оси 0X, имеет фиксированные значения X1 и X2 соответственно, можно записать:
(X1,Y11) - измеренная специализированным вычислителем 8 координата центра тени от действия первого излучателя на поверхности первого фотоприемника,
(X1,Y21) - измеренная специализированным вычислителем 8 координата центра тени от действия второго излучателя на поверхности первого фотоприемника,
(X2,Y32) - измеренная специализированным вычислителем 8 координата центра тени от действия третьего излучателя на поверхности второго фотоприемника,
(X2,Y42) - измеренная специализированным вычислителем 8 координата центра тени от действия четвертого излучателя на поверхности второго фотоприемника.
Полагается, что значениям Y11=0, Y21=0, Y32=0, Y42=0 соответствует отсутствие теней на поверхности первого или второго линейчатого приемника излучения. При реализации этого алгоритма в блоке:
10 - начало,
11 - проверяется условие Y11=0,
12 - проверяется условие Y21=0,
13 - проверяется условие Y32=0,
14 - проверяется условие Y42=0,
15 - переменной зоне присваивается значение δ,
переменной  присваивается значение
присваивается значение  ,
,
переменной  присваивается значение
присваивается значение ,
,
16 - переменной зоне присваивается значение α,
переменной  присваивается значение
присваивается значение  ,
,
переменной  присваивается значение
присваивается значение  ,
,
17 - переменной зоне присваивается значение β,
переменной  присваивается значение
присваивается значение  ,
,
переменной  присваивается значение
присваивается значение  ,
,
18 - переменной зоне присваивается значение γ,
переменной  присваивается значение
присваивается значение  ,
,
переменной  присваивается значение
присваивается значение  ,
,
19 - конец.
Расчет координат точки ∏ (положение пальца 9) сводится к нахождению точки (X∏,Y∏) пересечения двух прямых, проходящих через точки  и
и  и имеет вид:
и имеет вид:

где: 
причем координаты точек  и
и  , в системе координат 0XY (фиг. 5), принадлежат:
, в системе координат 0XY (фиг. 5), принадлежат:


Для расчета по формуле 2, в качестве  и
и  берется один из элементов, перечисленных в правых скобках 3 с учетом того, в какой зоне (α, β, γ, δ, определенной в алгоритме фиг. 7) находится палец 9 - выбирается пара координат с соответствующим верхним индексом. Аналогично, в качестве
берется один из элементов, перечисленных в правых скобках 3 с учетом того, в какой зоне (α, β, γ, δ, определенной в алгоритме фиг. 7) находится палец 9 - выбирается пара координат с соответствующим верхним индексом. Аналогично, в качестве  и
и  , берется один из элементов, перечисленных в правых скобках 4 с учетом того, какие излучатели участвуют в создании тени на поверхности линейчатых приемников излучений 5 и 6 - выбирается пара координат с соответствующим нижним индексом.
, берется один из элементов, перечисленных в правых скобках 4 с учетом того, какие излучатели участвуют в создании тени на поверхности линейчатых приемников излучений 5 и 6 - выбирается пара координат с соответствующим нижним индексом.
На фиг. 8 приведена функциональная схема устройства по второму пункту формулы изобретения, позволяющему в дополнение к определению координат пальца измерить скорость его касания сенсорной поверхности 7. Для этого устройство дополнительно содержит излучатели 20, 21, 22, 23, подключенные к дополнительным выходам специализированного вычислителя 8, смещенные вдоль линии, перпендикулярной сенсорной поверхности 7, и каждый из которых расположен на фиксированном расстоянии от соответствующего излучателя 1, 2, 3 и 4. Специализированный вычислитель 8, последовательно включая излучатели 20, 21, 22 и 23, вводит состояния линейчатых приемников излучений 5, 6, оптически сопряженных соответствующему излучателю. При пересечении пальцем 9 одного из потоков, формируемых излучателем 20, 21, 22 или 23, и падающего на поверхность соответствующего линейчатого приемника излучения 5 или 6, специализированный вычислитель 8 фиксирует появление тени и начинает отсчет промежутка времени, требуемого для вычисления скорости. Для этого он начинает цикл последовательного включения излучателей 1, 2, 3 и 4, ожидая появления теней, для чего опрашивается состояние линейчатых приемников излучения 5 и 6. Как только происходит пересечение пальцем 9 какого-либо потока, формируемого излучателями 1, 2, 3, 4 при его контакте с сенсорной поверхностью 7, отчет промежутка времени, требуемого для определения скорости, прекращается. Далее по координатам теней, формируемым какой-либо парой потоков от 1, 2, 3 или 4-го излучателей на поверхностях линейчатых фотоприемников 5 и 6, специализированный вычислитель 8 определяет координаты касания пальцем сенсорной поверхности 7. Кроме того, координаты точки касания позволяют уточнить путь, проходимый пальцем за определенный ранее промежуток времени, что повышает точность измерения скорости.
Сказанное иллюстрируется оптико-геометрической схемой, приведенной на фиг. 9. В этой схеме излучатели 20, 21, 22, 23, отстоящие от 1, 2, 3, 4-го излучателей на величину h перпендикулярно сенсорной поверхности 7, создают световые потоки Ψ5, Ψ6, Ψ7, Ψ8, которые совместно с линейчатыми фотоприемниками 5 и 6 формируют так называемую «верхнюю сенсорную поверхность», состоящую из двух плоскостей SH1 и SH1, изображенных на фиг. 10. Аналогично выражению 1 можно записать определения зон, на которые разделяется сенсорная поверхность 7:
Палец 9 в момент времени t1 находится в положении 9(t1) и, перемещаясь по траектории l(t) в момент времени t2, приходит в точку 9(t2), а в момент времени t3 касается сенсорной поверхности 7. При этом от пальца, находящегося в точке 9(t2), формируются теневые сегменты  и
и  , а в точке 9(t3) формируются теневые сегменты
, а в точке 9(t3) формируются теневые сегменты  и
и  .
.
Видно, что при движении пальца из состояния 9(t2) в состояние 9(t3), теневой сегмент  перемещается по направлению вектора ε, а теневой сегмент
перемещается по направлению вектора ε, а теневой сегмент  по направлению вектора τ. Измерив промежуток времени между появлением на линейчатых приемниках 5, 6 теневых сегментов
по направлению вектора τ. Измерив промежуток времени между появлением на линейчатых приемниках 5, 6 теневых сегментов  ,
,  и появлением там же теневых сегментов
и появлением там же теневых сегментов  ,
,  , определяем тем самым разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
, определяем тем самым разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
На геометрической схеме фиг. 10 видно образование 2-х плоскостей SH1 и SH2, образующих «верхнюю сенсорную поверхность». На этой фигуре m1 и m2 - осевые линии первого и второго линейчатых приемников излучения 5 и 6. Кроме того, для упрощения схемы излучатели 1, 2 и 3, 4 размещаются вдоль этих же осевых линий m1 и m2 соответственно.
При этом уравнение плоскости SH1 имеет вид:

а плоскости SH2 -

где:
 - координаты пятого, шестого, седьмого и восьмого излучателей 20, 21, 22 и 23 соответственно.
- координаты пятого, шестого, седьмого и восьмого излучателей 20, 21, 22 и 23 соответственно.
Координаты точки касания (X∏, Y∏) сенсорной поверхности 7 определяются по формулам 2, 3, 4. Решения уравнений 6, если:

или уравнения 7, если:

позволяет определить величину Z∏. Очевидно, что:

Скорость касания пальцем поверхности 7, равна:

На временной диаграмме фиг. 11 иллюстрируется работа системы, соответствующей 2-му пункту формулы изобретения. В фазе Φ1 этой диаграммы производится ожидание пересечения пальцем 9 одной из плоскостей SH1 или SH2, т.е. пересечение «верхней сенсорной плоскости» пальцем 9. Для этого в бесконечном цикле, производится формирование последовательности потоков Ψ5, Ψ6, Ψ7, Ψ8 в апертурном интервале Тар, с чтением состояния линейчатых приемников излучения 5 и 6 - кривые ρ1 и ρ2. Как только это пересечение обнаруживается, специализированный вычислитель 8 фиксирует момент времени t*. После этого начинается фаза Φ2, в которой ожидается касание пальцем 9 плоскости 7, для чего специализированным вычислителем 8 в бесконечном цикле производится формирование последовательности потоков Ψ1, Ψ2, Ψ3, Ψ4 с аналогичным чтением состояния линейчатых приемников. Если касание обнаруживается, специализированный вычислитель 8 фиксирует время t** и далее переходит к фазе Φ3. В этой фазе специализированный вычислитель 8 производит определение координат по формуле 2 с учетом выражений 3 и 4 и вычисление скорости по формуле 11 с учетом выражений 6, 7, 8, 9.
На фиг. 12 приведена функциональная схема устройства по третьему пункту формулы изобретения, позволяющему в дополнение к определению координат пальца измерить скорость его касания сенсорной поверхности 7. Устройство дополнительно содержит линейчатые приемники излучения 24 и 25, параллельно смещенные вверх от сенсорной плоскости относительно линейчатых приемников излучения 5 и 6 и подключенные к дополнительным входам специализированного вычислителя 8. Специализированный вычислитель 8 осуществляет управление излучателями 1, 2, 3 и 4, последовательно формируя оптические потоки, сопряженные с линейчатыми приемниками излучения 5 и 6, а также с вновь введенными линейчатыми приемниками излучения 24 и 25. При этом он измеряет промежуток времени между пересечением пальцем какого-либо из потоков, формируемых излучателями 1, 2, 3 и 4, регистрируемых линейчатыми приемниками излучения 24 и 25 и пересечением пальцем этих же потоков, но регистрируемых линейчатыми приемниками излучения 5 и 6. Далее по координатам теней, формируемым какой-либо парой потоков от 1, 2, 3 или 4-го излучателей на поверхностях линейчатых фотоприемников 5 и 6, специализированный вычислитель 8 определяет координаты касания пальцем сенсорной поверхности 7. Затем по значениям этих координат и геометрического расположения излучателей 20, 21, 22, 23 определяется расстояние, проходимое пальцем между пересечением одного из потоков излучателей 20, 21, 22, 23 до его контакта с сенсорной поверхностью 7. Эти данные позволяют далее специализированному вычислителю определить скорость пальца в момент его касания с сенсорной поверхностью 7.
На оптико-геометрической схеме фиг. 13 можно видеть, что палец 9, в момент времени t1, находится в положении 9(t1) и, перемещаясь по траектории l(t) в момент времени t2, приходит в точку 9(t2), а в момент времени t3 касается сенсорной поверхности 7. При этом от пальца, находящегося в точке 9(t2), формируются теневые сегменты  и
и  , а в точке 9(t3), формируются теневые сегменты
, а в точке 9(t3), формируются теневые сегменты  и
и  . Видно, что при движении пальца из состояния 9(t2) в состояние 9(t3) теневой сегмент
. Видно, что при движении пальца из состояния 9(t2) в состояние 9(t3) теневой сегмент  перемещается по направлению вектора ε, а теневой сегмент
перемещается по направлению вектора ε, а теневой сегмент  - по направлению вектора τ. Измерив промежуток времени между появлением теневых сегментов
- по направлению вектора τ. Измерив промежуток времени между появлением теневых сегментов  ,
,  , на линейчатых приемниках 24 и 25 и появлением теневых сегментов
, на линейчатых приемниках 24 и 25 и появлением теневых сегментов  ,
,  на линейчатых приемниках 5 и 6, определяем разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
на линейчатых приемниках 5 и 6, определяем разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
На геометрической схеме фиг. 14 видно образование 2-х плоскостей SL1 и SL2, образующих «верхнюю сенсорную поверхность». На этой фигуре m1 и m2 - осевые линии первого и второго линейчатых приемников излучения 5 и 6, а m3 и m4 - осевые линии третьего и четвертого линейчатых приемников излучения 24 и 25. Кроме того, для упрощения схемы излучатели 1, 2 и 3, 4 размещаются вдоль осевых линий m1 и m2 соответственно.
При этом уравнение плоскости SL1 имеет вид:

а плоскости SL2 -

где:
 - координаты положения 3-го и 4-го линейчатых приемников излучения (при условии их параллельности оси Y).
- координаты положения 3-го и 4-го линейчатых приемников излучения (при условии их параллельности оси Y).
Координаты точки касания (X∏, Y∏) сенсорной поверхности 7 определяются по формулам 2, 3, 4. Решения уравнений 9,
если:

или уравнения 10, если:

позволяет определить величину Z∏. Очевидно, что:

Скорость касания пальцем поверхности 7, равна:

Для определения момента пересечения пальцем 9 плоскости SL1 или SL2 специализированный вычислитель 8 в фазе Φ1 диаграммы, изображенной на фиг. 15, производит ожидание пересечения пальцем 9 плоскостей SL1 или SL2, т.е. пересечение «верхней сенсорной поверхности» пальцем 9. Для этого он формирует последовательность потоков Ψ1, Ψ2, Ψ3, Ψ4, - и в апертурном интервале Тар вводит состояния 3-го ленточного приемника излучения 24 (для излучений Ψ1, Ψ2) - сигнал ρ3, и 4-го ленточного приемника 25 (для излучений Ψ3, Ψ4) - сигнал ρ4. Как только обнаруживается наличие теневых сегментов, специализированный вычислитель 8 фиксирует момент времени t* и оканчивает фазу Φ1. После этого начинается фаза Φ2, в которой ожидается касание пальцем 9 плоскости 7, для чего продолжая формирование последовательности потоков Ψ1, Ψ2, Ψ3, Ψ4, производится обнаружение теневых сегментов на поверхности линейчатых фотоприемников 5 и 6, т.е. в апертурном интервале Tар вводит состояния 1-го ленточного приемника излучения 5 (для излучений Ψ1, Ψ2) - сигнал ρ1, и 2-го ленточного приемника 6 (для излучений Ψ3, Ψ4) - сигнал ρ2. Если это касание обнаруживается, специализированный вычислитель 8 фиксирует время t** и оканчивает фазу Φ2. В следующей фазе Φ3 производится вычисление скорости и координат касания сенсорной поверхности, представленное сигналом С. Далее последовательность перечисленных фаз повторяется в бесконечном цикле.
На фиг. 16 приведена функциональная схема устройства формирования сенсорной поверхности по четвертому пункту формулы изобретения, позволяющему дополнительно к координатам касания пальцем 9 сенсорной поверхности 7 измерять и скорость его касания. Устройство дополнительно содержит линейчатые приемники излучения 24 и 25, параллельно смещенные вверх от сенсорной плоскости относительно линейчатых приемников излучения 5 и 6 и подключенные к дополнительным входам специализированного вычислителя 8, а также излучатели 20 и 22, расположенные на краях линейчатых приемников излучения 24 и 25 и подключенные к дополнительным выходам специализированного вычислителя 8. Циклически формируя потоки излучения с помощью 20 и 22 излучателей, специализированный вычислитель 8 находится в ожидании появления теневого сегмента, вызванного пересечением одного из этих потоков пальцем, на поверхности линейчатых приемников излучения 24 или 25. При обнаружении теневого сегмента специализированный вычислитель 8 фиксирует момент времени t*.
После того как это пересечение произошло, циклически формируя потоки излучения с помощью 1 и 3 излучателей, специализированный вычислитель 8 находится в ожидании появления теневого сегмента, вызванного пересечением одного из этих потоков пальцем, на поверхности линейчатых приемников излучения 4 или 5. При обнаружении теневого сегмента специализированный вычислитель 8 фиксирует момент времени t**. Далее для вычисления скорости используется значение интервала времени t**-t*.
На оптико-геометрической схеме фиг. 17 можно видеть, что палец 9 в момент времени t1 находится в положении 9(t1) и, перемещаясь по траектории l(t) в момент времени t2, приходит в точку 9(t2), а в момент времени t3 касается сенсорной поверхности 7. При этом от пальца, находящегося в точке 9(t2), формируется теневой сегмент  , а в точке 9(t3) формируются теневые сегменты
, а в точке 9(t3) формируются теневые сегменты  и
и  . Измерив промежуток времени между появлением теневого сегмента
. Измерив промежуток времени между появлением теневого сегмента  и появлением теневого сегмента
и появлением теневого сегмента  , определяем разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
, определяем разность t3-t2, требуемую для измерения скорости движения пальца в момент его касания с поверхностью 7.
Теневой сегмент  позволяет определить координату точки касания пальцем 5, сенсорной поверхности 7 по формуле 2 с учетом условий 3 и 4.
позволяет определить координату точки касания пальцем 5, сенсорной поверхности 7 по формуле 2 с учетом условий 3 и 4.
На фиг. 18 представлена геометрическая схема образования «верхней сенсорной поверхности».
Для определения момента ее пересечения пальцем достаточно двух излучателей 24 и 25, а расстояние, которое палец 9 пересекает между моментами времени t2 и t3, постоянно и равно h.
Исходя из вышесказанного, скорость касания в данном случае определяется как:

На временной диаграмме фиг. 19 иллюстрируется работа системы, соответствующей 4-му пункту формулы изобретения. В фазе Φ1 этой диаграммы производится ожидание пересечения пальцем 9 плоскости SM, т.е. пересечение «верхней сенсорной поверхности». Для этого в бесконечном цикле производится формирование последовательности потоков Ψ5, Ψ6, в апертурном интервале Тар, с чтением состояния линейчатых приемников излучения 24 и 25 - сигналы ρ3 и ρ4. Как только это пересечение обнаруживается, специализированный вычислитель 8 фиксирует момент времени t*. После этого начинается фаза Φ2, в которой ожидается касание пальцем 9 плоскости 7, для чего специализированным вычислителем 8 в бесконечном цикле производится формирование последовательности потоков Ψ1, Ψ3 с чтением состояния линейчатых приемников излучения 5 и 6 - сигналы ρ1 и ρ2. Если касание обнаруживается, специализированный вычислитель 8 фиксирует время t** и далее переходит к фазе Φ3. В этой фазе специализированный вычислитель 8 производит формирование потоков Ψ2, Ψ4 c фиксацией координат теневых сегментов на поверхностях линейчатых приемников излучений 5 и 6. В фазе Φ4 производится определение координат по формуле 2 с учетом выражений 3 и 4 и вычисление скорости по формуле 12, и изображено сигналом C. Далее последовательность перечисленных фаз повторяется в бесконечном цикле.
На фиг. 20 приведена геометрическая схема взаимного размещения линейчатых приемников излучения 5, 24 или 6, 25, где:
m, m′ - осевые линии приемников излучения 5 и 24, или 6 и 25.
d - межцентровое расстояние фотоприемников, входящих в состав линейчатых приемников излучения,
T - фрагмент тени, падающей на поверхности линейчатых приемников излучения.
Для повышения разрешающей способности верхний линейчатый приемник излучения сдвинут относительно нижнего на величину, равную половине межцентрового расстояния d.
Для повышения помехоустойчивости работы данного устройства может быть использована амплитудная модуляция оптических потоков Ψ1, Ψ2, Ψ3, Ψ4, Ψ5, Ψ6, Ψ7, Ψ8 излучателей 1, 2, 3, 4, 20, 21, 22, 23. Для этого последовательно на каждом из выходов специализированного вычислителя 8 формируется пачка импульсов с частотой равной центральной частоте полосового фильтра, используемого в рассматриваемой ниже схеме обработки сигнала фотоприемника, в частности фотодиода, приведенной на фиг. 21. Сигналы фотодиодов, входящих в состав линейчатых приемников излучений 5, 6, 24, 25, обрабатываются цепочкой из последовательно включенных трансимпедансного усилителя 26, усилителя с регулируемым усилением 27, полосового фильтра 28 и демодулятора 29. Кроме того, управляющая цепь 30 по сигналу с выхода полосового фильтра 28 формирует сигнал обратной связи, управляющий коэффициентом усиления усилителя 27, и опорный уровень, поступающий в демодулятор 29. Учитывая повышенные требования к быстродействию фотоприемников в данной схеме обработки, в их качестве должны использоваться высокочастотные pin-фотодиоды. Данная схема (фиг. 21) нашла широкое применение в системах дистанционного управления бытовым оборудованием (телевизоры, музыкальные центры и пр.). Производится обширная номенклатура фотоприемников, в которых эта схема интегрирована в одном корпусе с pin-фотодиодом [7, 8], либо выполнена в виде отдельной микросхемы [9], что упрощает их использование в предлагаемом устройстве.
Источники информации
1. Патент США №7006236 B2 от 28.02.2006 г.
2. Патент США №6480187 от 12.11.2002 г.
3. Патент США №6492633 от 10.12.2002 г.
4. Патент США №6844539 от 18.01.2005 г.
5. Патент США №7522156 от 21.04.2009 г.
6. Патент РФ №2278423 от 20.06.2006 г.
7. IR-Receiver for Remote Control Systems. Справочный материал фирмы OSRAM, Opto Semiconductors GmbH, Wernerwerkstrasse 2, D-93049 Regensburg. www.osram-os.com.
8. IR Receiver Modules for Remote Control Systems. Справочный материал фирмы Vishay. Document Number: 82177. Rev. 2.3, 04-Feb-11. www.vishay.com.
9. Preamplifier Circuit for IR Remote Control. Справочный материал фирмы Vishay. Document Number: 82443. Rev. 1.4, 05-Feb-14. http://www.vishay.com/docs/82443/vsop383.pdf.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2566958C1 |
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО | 2013 |
|
RU2542947C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ | 2013 |
|
RU2548923C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ БОКОВОГО АВТОМОБИЛЬНОГО СТЕКЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2556734C1 |
| Многолучевая стрелковая мишень | 2024 |
|
RU2840640C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| СЕНСОРНАЯ ПАНЕЛЬ НА ОСНОВЕ СВЕТОВОДОВ | 2013 |
|
RU2541849C2 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
Изобретение относится к технике оптических Touch-панелей, широко применяемых в торговле, электронных платежных системах, в игровых приложениях. Технический результат - упрощение подгонки сенсорной панели под требуемый размер, в том числе, с возможностью увеличения размера, возможность измерения скорости касания с сенсорной поверхностью. Устройство содержит четыре излучателя и два оптически сопряженных с ними линейных фотоприемника, состоящих из набора фотодиодов или фототранзисторов. Специализированный вычислитель управляет включением излучателей и вводит состояния линейчатых фотоприемников последовательно для каждого излучателя. При пересечении пальцем оператора оптических потоков, формируемых этими излучателями, появляются тени на поверхности одного или обоих ленточных приемников излучения. Специализированный вычислитель далее пересчитывает координаты образованных теней в координаты пальца оператора. Кроме того, дополнительное введение в устройство 4-х излучателей, отстоящих от имеющихся и оптически сопряженных с ленточными приемниками излучений, позволяет определить скорость, с которой палец соприкасается с сенсорной поверхностью. 5 з.п. ф-лы, 21 ил.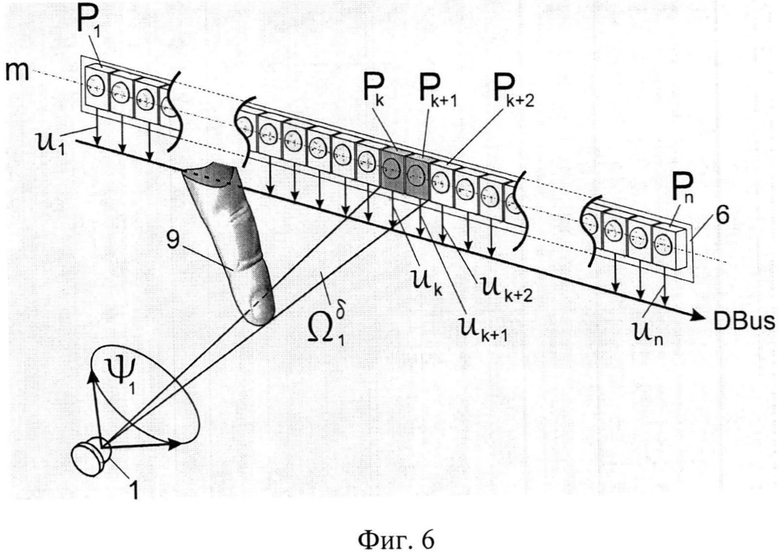
1. Оптическое сенсорное устройство с возможностью измерения скорости касания пальцем сенсорной поверхности, содержащее два излучателя и линейчатый приемник излучения, состоящий из набора фотодиодов или фототранзисторов, оптически сопряженный с первым и вторым излучателями, и вычислитель, первый и второй выходы которого подключены к первому и второму излучателям, а первый вход к выходу линейчатого приемника излучения, отличающееся тем, что дополнительно содержит третий и четвертый излучатели, подключенные к третьему и четвертому выходам вычислителя и второй линейчатый приемник излучения, оптически сопряженный с третьим и четвертым излучателями, и подключенный ко второму входу вычислителя, кроме того, третий и четвертый излучатели располагаются на краях первого линейчатого приемника излучения, а первый и второй излучатели располагаются на краях второго линейчатого приемника излучения, а вычислитель управляет состояниями излучателей так, что попарное пересечение оптических потоков, формируемых излучателями на поверхностях линейчатых фотоприемников, образует четыре зоны, определяющие сенсорную поверхность, кроме того, вычислитель вводит сигналы с выходов первого и второго линейчатых приемников излучения и определяет по ним координаты пальца, пересекшего одну из четырех зон.
2. Устройство по п. 1, отличающееся тем, что дополнительно содержит пятый, шестой, седьмой и восьмой излучатели, оптические центры которых расположены на линиях, проходящих через оптические центры первого, второго, третьего и четвертого излучателей соответственно и перпендикулярных сенсорной поверхности, причем вновь введенные излучатели оптически сопряжены с соответствующими линейчатыми приемниками излучения и подключены к дополнительным выходам вычислителя, при этом вычислитель, управляя состояниями излучателей, фиксирует интервал времени между пересечением объектом потоков пятого, шестого, седьмого или восьмого излучателей, падающих на оптически сопряженные с ними линейчатые приемники излучения, и пересечением пальцем потоков первого, второго, третьего или четвертого излучателей, падающих на оптически сопряженные с ними линейчатые приемники излучения, далее на основании значения этого интервала вычислитель определяет скорость касания пальцем сенсорной поверхности.
3. Устройство по п. 1, отличающееся тем, что дополнительно содержит третий и четвертый линейчатые приемники излучения, подключенные к дополнительным входам вычислителя и расположенные над первым и вторым линейчатыми приемниками излучения соответственно, при этом вычислитель фиксирует интервал времени между пересечением пальцем потоков первого, второго, третьего, четвертого излучателей, падающих на соответствующие, оптически сопряженные с ними третий и четвертый линейчатые приемники излучения, и пересечением им потоков первого, второго, третьего или четвертого излучателей, падающих на соответствующие, оптически сопряженные с ними первый и второй линейчатые приемники излучения, далее на основании значения этого интервала вычислитель определяет скорость касания пальцем сенсорной поверхности.
4. Устройство по п. 3, отличающееся тем, что дополнительно содержит пятый и шестой излучатели, оптические центры которых находятся на линии, проходящей через оптические центры первого и третьего излучателя соответственно, перпендикулярной сенсорной поверхности, причем пятый и шестой излучатели подключены к дополнительным выходам вычислителя и оптически сопряжены с третьим и четвертым линейчатыми приемниками излучения соответственно.
5. Устройство по п. 3 или 4, отличающееся тем, что первый, третий и второй, четвертый линейчатые приемники излучения смещены относительно друг друга на величину половины межцентрового расстояния, вдоль горизонтальной оптической оси фотоприемников, входящих в состав линейчатых приемников излучения.
6. Устройство для формирования сенсорной поверхности по п. 1, или 2, или 3, или 4, отличающееся тем, что входящие в состав линейчатых приемников излучения фотодиоды подключены к набору последовательно включенных трансимпедансного усилителя, усилителя с регулируемым усилением, полосового фильтра и демодулятора, и выходы которых подключены к входу вычислителя, при этом на своем первом, втором, третьем и четвертом выходах он поочередно формирует пачки импульсов с частотой заполнения, равной центральной частоте полосовых фильтров.
| УСТРОЙСТВО ДЛЯ ИНТЕРАКТИВНОЙ ЛОКАЛИЗАЦИИ ОБЪЕКТОВ | 2004 |
|
RU2278423C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КАСАНИЯ ОПТОЭЛЕКТРОННОГО СЕНСОРНОГО ЭКРАНА С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2007 |
|
RU2353002C2 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 20100315383 A1, 16.12.2010. | |||

