Изобретение относится к технике оптических Touch - панелей, широко применяемых в торговле, электронных платежных системах, в персональных компьютерах.
Известен ряд устройств подобного назначения. Например, в патенте США №7006236 В2 от 28.02.2006 г. [1], предлагается устройство, создающее виртуальную сенсорную поверхность, касание которой в определенных местах эквивалентно нажатию кнопок. Данное устройство содержит телевизионную камеру, оптически сопряженный с ней источник структурированного освещения и вычислительное устройство. Введение пальца в создаваемый источником структурированного освещения поток регистрируется телевизионной камерой. Вычислительное устройство обрабатывает видеоинформацию, поступающую с телевизионной камеры, и определяет координаты точки касания пальца с потоком структурированного излучения. В устройствах, предложенных в патентах США №6480187 от 12.11.2002 г. [2], №6492633 от 10.12.2002 г. [3], №6844539 от 18.01.2005 г. [4], №7522156 от 21.04.2009 г. [5], используются отражатель и два приемопередающих оптических модуля. При появлении на пути потоков, формируемых излучателями, входящими в состав приемо-передающих модулей пальца (стилуса), специализированный вычислитель, с помощью фотоприемников, входящих в состав приемо-передающих модулей, регистрирует угловые координаты пальца (стилуса).
Наиболее близким по технической реализации является устройство, предложенное в патенте РФ №2362216 от 12.05.2009 г. [6]. В нем используются первый и второй излучатели, оптически сопряженный с ними фотоприемник и вычислительное устройство, а также так называемая «поверхность теневой локации», оптически сопряженная с первым и вторым излучателями и фотоприемником, на которую поочередно падают световые потоки от первого и второго излучателя, и представляющая собой диффузно рассеивающую излучение поверхность. Кроме того, фотоприемник представляет собой телевизионную камеру, полем обзора которой является «поверхность теневой локации». Рабочая зона устройства образуется пересечением конусов распространения потоков излучения первого и второго излучателей, падающих на «поверхность теневой локации». При этом при введении пальца (стилуса) оператора в рабочую зону устройства на «поверхности теневой локации» образуются поочередно, по сигналам вычислительного устройства, управляющего включением излучателей, две тени. Их изображения с помощью телевизионной камеры вводятся в вычислительное устройство, которое определяет по ним пространственные координаты пальца (стилуса) и углы его наклона к поверхности рабочей области.
Целью предлагаемого изобретения является повышение быстродействия и точности.
Для этого в известное устройство, содержащее сенсорную поверхность, отражатель, охватывающий часть периметра сенсорной поверхности, оптически сопряженные с отражателем фотоприемник, объектив, два пространственно разнесенных излучателя, а также специализированный вычислитель, причем выход фотоприемника подключен к входу специализированного вычислителя, а первый и второй излучатели подключены к соответствующим выходам специализированного вычислителя, дополнительно вводится цилиндрическая линза, оптически сопряженная с объективом, а фотоприемник выполнен в виде линейчатого, ПЗС или КМОП типа, размещенного параллельно сенсорной поверхности.
Функциональная схема предлагаемого устройства приведена на фиг.1, где:
1 - специализированный вычислитель;
2, 3 - первый и второй излучатели;
4 - отражатель;
5 - сенсорная поверхность;
6 - цилиндрическая линза;
7 - объектив;
8 - линейчатый фотоприемник.
Специализированный вычислитель 1 поочередно включает один из двух излучателей 2 и 3, формирующих потоки излучения ψ1 и ψ2, направленные в сторону отражателя 4. При появлении на пути распространения потоков ψ1 и ψ2 пальца (стилуса) оператора, касающегося сенсорной поверхности 5, происходит затенение поверхности отражателя 4. С помощью цилиндрической линзы 6 и объектива 7, в плоскости нахождения линейчатого фотоприемника 8 строится изображение отражателя 4, на котором попеременно появляются две тени, соответствующие включенному состоянию одного из двух излучателей.
На фиг.2 приведена оптическая схема построения изображения осевой линии отражателя, параллельной сенсорной поверхности 5, где:
ρ - осевая линия отражателя 4;
ε1, ε2 - точки, принадлежащие линии ρ;




α - плоскость меридиональной фокусировки;
β - плоскость сагиттальной фокусировки;
γ - изображение линии ρ в плоскости β;
δ - изображение линии ρ в плоскости α.
Так как оптическая система (цилиндрическая линза - объектив) обладает ярко выраженным астигматизмом, элементарные пучки лучей, исходящие из точек ε1 и ε2, имеют в пространстве изображений в меридиональном и сагиттальном сечениях различные точки сходимости -
Таким образом, благодаря наличию цилиндрической линзы 7, происходит меридиональная расфокусировка изображения отражателя 4 в плоскости β (в которой находится линейчатый фотоприемник 8) в направлении, перпендикулярном расположению фотоприемных пикселей. При этом изображение тени на поверхности отражателя 4 будет пересекать фотоприемную линейку, расположенную в плоскости β, перпендикулярно расположению фотоприемных пикселей.
На фиг.3 приведен пример формирования изображения тени от стилуса П, пересекающего световой поток ψ1 излучателя 2, где:
O - центр оптической системы;
П - стилус;
Т - тень, формируемая на поверхности отражателя;
τ - изображение тени на плоскости β.
Таким образом, при затенении падающего на отражатель 4 светового потока, формируемого при поочередном включении излучателей 2 и 3, на отражателе формируются две тени, изображение которых, построенное объективом 7 и цилиндрической линзой 6, пересекает фотоприемные пиксели линейчатого фотоприемника 8.
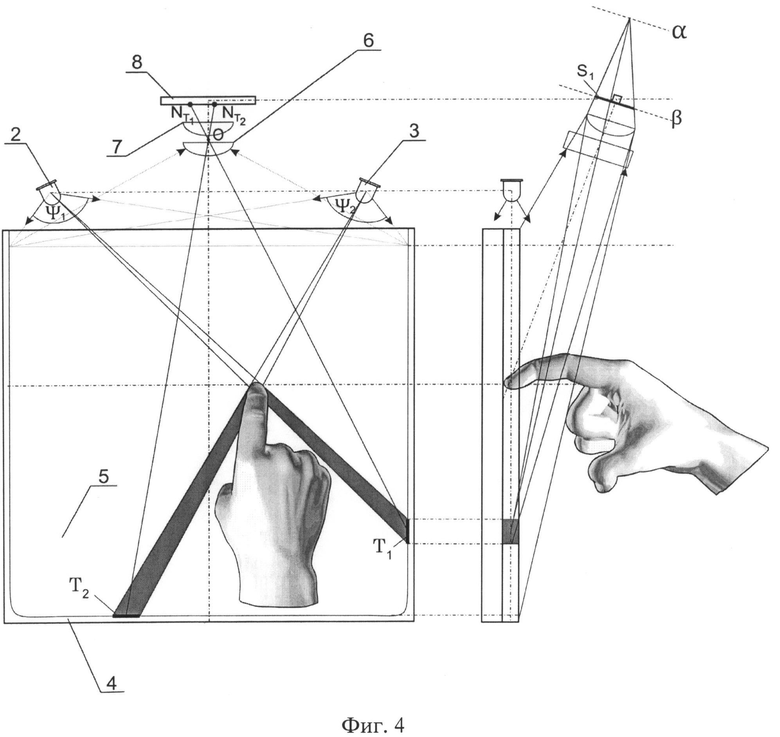
На фиг.4 изображен в двух проекциях пример конструктивного исполнения предлагаемой системы, где:
T1 - тень, формируемая пальцем при включенном первом излучателе 2;
Т2 - тень, формируемая пальцем при включенном втором излучателе 3;
NT1 - номер пикселя линейчатого фотоприемника, соответствующего середине изображения тени T1 на его поверхности;
NT2 - номер пикселя линейчатого фотоприемника, соответствующего середине изображения тени Т2 на его поверхности;
S1 - поперечное сечение изображения тени Т1, формируемой в плоскости β.
Видно, что первый 2 и второй 3 излучатели и линия ρ, проходящая по середине отражателя 4, находятся в плоскости, параллельной сенсорной поверхности 5. Цилиндрическая линза 6, объектив 7 и линейчатый фотоприемник 8 отстоят консольно над сенсорной поверхностью 5. Благодаря расфокусировке изображения отражателя 4 в плоскости β, изображения теней в плоскости β пересекают фоточувствительную поверхность линейчатого фотоприемника 8 и не дает этим изображениям выйти за пределы линии расположения фотоприемных пикселей.
Это в свою очередь исключает необходимость точной юстировки линейчатого фотоприемника относительно отражателя 4 и делает несущественным фактор перспективных искажений, имеющий место в прототипе и требующий при этом применения матричного фотоприемника.
Несмотря на возможное пересечение потоков, отраженных от отражателя 4, пальцем или кистью оператора, для функционирования данного устройства важен только факт пересечения потоков ψ1 и ψ2. Именно при этом образуются тени T1 и Т2 в разных местах отражателя 4 и, как следствие, различные значения координат изображений этих теней на поверхности линейчатого фотоприемника 8.
На фиг.5 приведен вариант оптической схемы данного устройства, в которой излучатели находятся вблизи сборки «линейчатый фотоприемник-объектив-цилиндрическая линза». Это позволяет использовать при изготовлении верхнего и нижнего отражающих сегментов материал, переотражающий излучение в сторону источника излучения. Таким образом, может быть увеличена помехоустойчивость устройства, т.к. большая часть отраженного излучения будет направляться в сторону расположенной рядом с излучателями оптической системы. Для этого, отражатель может быть выполнен в виде поверхности, покрытой оптически прозрачными микрошариками или микропирамидами, например интегрированными в световозвращающие пленки и ткани фирм "Zhejiang Fangyuan Yeshili Reflective Material Co., Ltd" или "Orafol" [8].
Для повышения помехоустойчивости предлагаемого устройства, излучатели 2 и 3 должны обладать диаграммой направленности, представляющей собой поток излучения «прижатый» к сенсорной поверхности 5, и максимальная энергия которого концентрируется на поверхности отражателя 4, что может быть получено использованием фокусирующих систем на базе цилиндрических линз.
Точность определения координат касания в данном устройстве может быть существенно выше, чем в прототипе, использующем матричный приемник изображения. Это связано с тем, что линейчатые фотоприемники имеют большее разрешение, чем тот же параметр матричных. Примером может служить линейка с разрешением 12000 пикселей, фирмы Atmel ТН7834С [9], с линейным размером фоточувствительной зоны 78 мм. Кроме того, применение линейчатого фотоприемника позволяет повысить скорость обновления информации на несколько порядков. Так в отличие от типовой скорости кадровой развертки матричного приемника изображения в пределах 50-60 Гц, линейчатый фотоприемник, как например упомянутый выше Atmel ТН7834С, имеет 4 выходных видеоканала и скорость считывания 5 МГц / пиксель на канал, что дает эквивалентную скорость обновления информации 1700 Гц, при существенно большей точности. В случае более низкого разрешения, например при использовании линейчатого фотоприемника S9227 фирмы Hamamatsu [10], разрешением 512 пикселей и частотой считывания 5 МГц, можно получить скорость обновления 10 кГц, т.е. выше, чем у матрицы с эквивалентным разрешением в 200 раз.
На фиг.6 приведена упрощенная оптическая схема данной системы, поясняющая вывод координат точки касания сенсорной поверхности, где:
OXY - система координат;
(XП, YП) - координаты точки касания;
(Xψ1, Yψ1) - координаты первого излучателя;
(Хψ2, Yψ2) - координаты второго излучателя;
(Х1, 0) - координата тени на отражателе от действия первого излучателя;
(X2, 0) - координата тени на отражателе от действия второго излучателя;
(XP1, YP1) - координаты оптического центра изображения тени от действия первого излучателя, на поверхности фотоприемной линейки,
(ХP2, YP2) - координаты оптического центра изображения тени от действия второго излучателя, на поверхности фотоприемной линейки,
(XF, YF) - координаты оптического центра объектива.
Запишем уравнения прямых, проходящих через точки (Х1, 0), (ХP1, YP1), (XF, YF) и (Х2, 0), (ХP2, YP2), (XF, YF), учитывая, что YP1=YP2=YP:

откуда могут быть получены значения Х1 и Х2.
Далее, для точек (X1, 0), (Xψ1, Yψ1), (XП, YП) и (X2, 0), (Хψ2, Yψ2), (XП, YП) запишем:

откуда получаем значения координат точки (XП, YП).
Таким образом, специализированный вычислитель 1 осуществляет поочередное включение одного из двух излучателей 2 и 3, ввод видеосигналов с выхода линейчатого фотоприемника 8, соответствующих включенному состоянию каждого из излучателей 2, 3, и определение по амплитудам видеосигналов наличия теней, вызванных касанием пальцем или стилусом сенсорной поверхности. Далее, на основании заложенных в специализированный вычислитель данных о геометрических параметрах линейчатого фотоприемника, координат излучателей и оптического центра объективов, по формуле 1 могут быть определены координаты теней на поверхности отражателя 4, а затем по формулам 2 их пересчет в координаты точки касания.
Источники информации
1. Патент США №7006236 В2 от 28.02.2006 г.
2. Патент США №6480187 от 12.11.2002 г.
3. Патент США №6492633 от 10.12.2002 г.
4. Патент США №6844539 от 18.01.2005 г.
5. Патент США №7522156 от 21.04.2009 г.
6. Патент РФ №2362216 от 12.05.2008 г.
7. Справочник конструктора оптико-механических приборов. Под общей редакцией В. А. Панова. Ленинград, Машиностроение, 1980 г., стр.102.
8. http://www.orafol.com.
9. ТН7834С.Very High-resolution Linear CCD Image Sensor 12000 Pixels. Справочный материал фирмы Atmel. Rev. 1997A-IMAGE-05/02.
10. S9227. CMOS Linear Image Sensor. Справочный материал фирмы HAMAMATSU. Cat. No.KMPD1074E04. Feb. 2007 DN.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ БОКОВОГО АВТОМОБИЛЬНОГО СТЕКЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2556734C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2566958C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ СКОРОСТИ | 2014 |
|
RU2575388C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ | 2013 |
|
RU2548923C2 |
| СЕНСОРНАЯ ПАНЕЛЬ НА ОСНОВЕ СВЕТОВОДОВ | 2013 |
|
RU2541849C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |
| Способ жестового управления и устройство для его реализации | 2021 |
|
RU2777910C1 |




Изобретение относится к технике оптических систем построения сенсорных панелей. Техническим результатом является повышение быстродействия и точности определения координат касания сенсорной поверхности. Оптическое сенсорное устройство содержит сенсорную поверхность, отражатель, охватывающий часть периметра сенсорной поверхности, оптически сопряженные с отражателем фотоприемник, объектив, два пространственно разнесенных излучателя, а также вычислитель, причем выход фотоприемника подключен к входу вычислителя, а выходы вычислителя подключены к первому и второму излучателям, причем дополнительно вводится цилиндрическая линза, оптически сопряженная с объективом, а фотоприемник выполняется в виде линейчатого, размещенного параллельно сенсорной поверхности. 3 з.п. ф-лы, 6 ил.
1. Оптическое сенсорное устройство, содержащее сенсорную поверхность, отражатель, охватывающий часть периметра сенсорной поверхности, оптически сопряженные с отражателем фотоприемник, объектив, два пространственно разнесенных излучателя, а также вычислитель, причем выход фотоприемника подключен к входу вычислителя, а выходы вычислителя подключены к первому и второму излучателям, отличающееся тем, что дополнительно вводится цилиндрическая линза, оптически сопряженная с объективом, а фотоприемник выполняется в виде линейчатого, размещенного параллельно сенсорной поверхности.
2. Устройство по п.1, отличающееся тем, что оптические центры первого и второго излучателей и центральная ось отражателя лежат в одной плоскости, параллельной сенсорной поверхности.
3. Устройство по п.1, отличающееся тем, что отражатель выполнен из светорассеивающего материала.
4. Устройство по п.1, отличающееся тем, что отражатель выполнен из светоотражающего материала, а первый и второй излучатели находятся на таком расстоянии от цилиндрической линзы, что большая часть переотраженного излучения достигает ее входной апертуры.
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА НА СЕНСОРНОЙ ПАНЕЛИ | 2009 |
|
RU2399949C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

