Предлагаемая многолучевая стрелковая мишень предназначена для использования в процессе тренировок и в проведении соревнований в соответствующих видах спорта, а также в развлекательных целях.
Данное изобретение относится к технике неподвижных и движущихся мишеней с системой определения попаданий фотоэлектрическим методом, а также с использованием инфракрасного излучения, и кроме того к технике использования свойств оптической проекции физических объектов для определения их пространственного положения в реальном масштабе времени.
Известен ряд оптико-электронных мишеней, например, LS25/50 LASERSCORE® фирмы SIUS, которая содержит два вертикальных ряда фотоприемных линеек, выполненных в виде печатных плат по 280 дискретных фотоприемников в каждой, и расположенных по бокам плоскости мишени [1]. Аппаратурой мишени фиксируется положение теней, отбрасываемых пулей на поверхностях фотоприемных линеек для каждого из шести излучателей (по три с каждой стороны), что требует непрерывной коммутации источников излучения. Как следует из материала фирмы SIUS аппаратурой мишени производится 160000 циклов коммутации в секунду. Это позволяет получить шесть измерений координат теней, отбрасываемых пулей на фотоприемные линейки, фиксируемых с 6-ти ракурсов, т.е. от каждого из 6-ти источников излучения за время пролета пулей области мишени [2]. Недостатком данного технического решения по сравнению с предлагаемым является его высокая стоимость, связанная с использованием фотоприемных линеек большого габарита. Это в свою очередь требует применения многослойных печатных плат из-за большого количества сигнальных проводников, связывающих фотоприемники с вычислителем. Существенно, что в данной конструкции используется шесть, по три с каждой стороны, FPGA - программируемых логических интегральных схем, выполняющих роль вычислителя, и которые пришлось распределить по отдельным печатным платам. Кроме того, в такой измерительной схеме, точность измерения напрямую зависит от количества дискретных фотоприемников, и как следствие этого, ограничена размером печатных плат и минимальным шагом размещения на ней электронных компонентов.
Фирмой Megalink AS, представлено техническое решение, в котором пуля пересекает ряд световых полос, расположенных в корпусе мишени. Фотоприемные линейки, оптически сопряженные с каждой из полос, обнаруживают тени, отбрасываемые пулей. Измеренные при этом промежутки времени между пересечением полос используются для расчета скорости пули и ее положения [3]. Недостаток этого технического решения заключается в увеличенном размере корпуса электронной мишени, требуемом для размещения рядов световых полос и фотоприемных линеек.
Известна мишень, предложенная Институтом прикладной механики УрО РАН. Сущность этого изобретения заключается в том, что световая мишень содержит от четырех до шести световых экранов, каждый из которых установлен определенным образом по отношению к плоскости мишени и образован с помощью одного линейно протяженного источника - излучателя и одного оптически связанного с ним оптико-электронного преобразователя -приемника [4]. Как и в предыдущем техническом решении, существенный недостаток данного - большой глубинный размер мишени, ограничивающий ее специальным применением, не связанным со спортом.
В патенте US № 5637866 от 10.06.1997 г. «Аппаратура и способ оптического обнаружения и электронного анализа местоположения снаряда в плоскости цели», предлагается наличие двух источников света, образующих две световые зоны, которые проходят между ними под определенным углом. Световые зоны охватывают плоскость цели, освещая снаряд, пересекающий плоскость цели, и отбрасывают тень снаряда на экран, предпочтительно рассеянный экран из матового стекла. Тень или изображение на экране детектируется фотодетектором с пространственным разрешением, а полученные таким образом сигналы затем анализируются следующим образом: отдельные тестовые сигналы от отдельных элементов фото детектора интегрируются в течение одного цикла измерения, и полученные таким образом суммарные сигналы от отдельных элементов добавляются в окончательную сумму. Окончательная сумма сравнивается с эталонным значением, и в случае отклонения от эталонного значения определяется возможно потемневший элемент фото детектора, и на основании этого делается вывод о местоположении снаряда в целевой плоскости [5].
Недостаток данного технического решения заключается в необходимости использования в качестве фотодетектора с пространственным разрешением скоростных матричных датчиков изображения. К сожалению, для получения несмазанного изображения оружейной пули, требуются высокие кадровая частота развертки и вычислительная мощность обработки цифрового потока, поступающего с датчика изображения. Сложность и стоимость такого технического решения слишком высока для широкого применения в спортивных мишенях.
Фирмой Dynetics, Inc. предложена электронная мишень, содержащая два быстродействующих датчика изображения оптически сопряженных с отражающими поверхностями, подсвечиваемых в свою очередь двумя источниками излучения. Появление теней на поверхности диффузных отражателей, образуемое при пролете пули, регистрируется датчиками изображения, связанными с вычислительным устройством, которое определяет ее положение [6]. Недостаток этого технического решения такой же, как и у предыдущего - высокая цена используемых в нем скоростных датчиков изображения и широкая полоса данных, подлежащих обработке вычислительным устройством в реальном времени, и, следовательно, высокая сложность и стоимость данной мишени.
В патенте №2806533 от 18.19.2022 «Оптико-электронная стрелковая мишень модульного типа» [7] предлагается стрелковая мишень, содержащая два, пространственно разнесенных источника излучения, пересечение оптических потоков которых охватывает зону регистрации точек попадания пули и оптически сопряженных с линейным массивом фотоприемников, а также вычислительное устройство, причем линейный массив фотоприемников расположен на отдельных модулях фиксации, каждый из которых содержит ограниченный набор фотоприемников, оптически сопряженных с двумя пространственно разнесенных источниками излучения, и содержит входной и выходной последовательные порты приема и передачи информации, а так же набор входных-выходных управляющих сигналов, причем управляющие сигналы всех модулей фиксации связаны общей шиной управляющего интерфейса и подключены к параллельному интерфейсу вычислительного устройства, при этом, при затенении хотя бы одного фотоприемника любого из модулей фиксации, формируется активный уровень одного из сигналов управляющего интерфейса, по которому вычислительное устройство формирует сигнальную последовательность на общей шине управляющего интерфейса, которая вызывает сдвиг накопленной в модулях фиксации информации с последовательного выхода каждого модуля фиксации на последовательный вход соседнего с ним модуля фиксации, причем выход модуля фиксации, ближайшего к вычислительному устройству, связан с последовательным входом данных вычислительного устройства, а далее, после ввода в вычислительное устройство накопленной в модулях фиксации информации, вычислительное устройство определяет координаты точки попадания пули в зону регистрации.
Данное техническое решение по своему функционированию наиболее близко к предлагаемому, и является его прототипом.
Целью предлагаемого технического решения является повышение точности измерения координат за счет многолучевой подсветки измеряемого снаряда, в процессе прохождения зоны регистрации с одновременным уменьшением размера мишени.
Функционирование предлагаемого устройства иллюстрируется следующими фигурами:
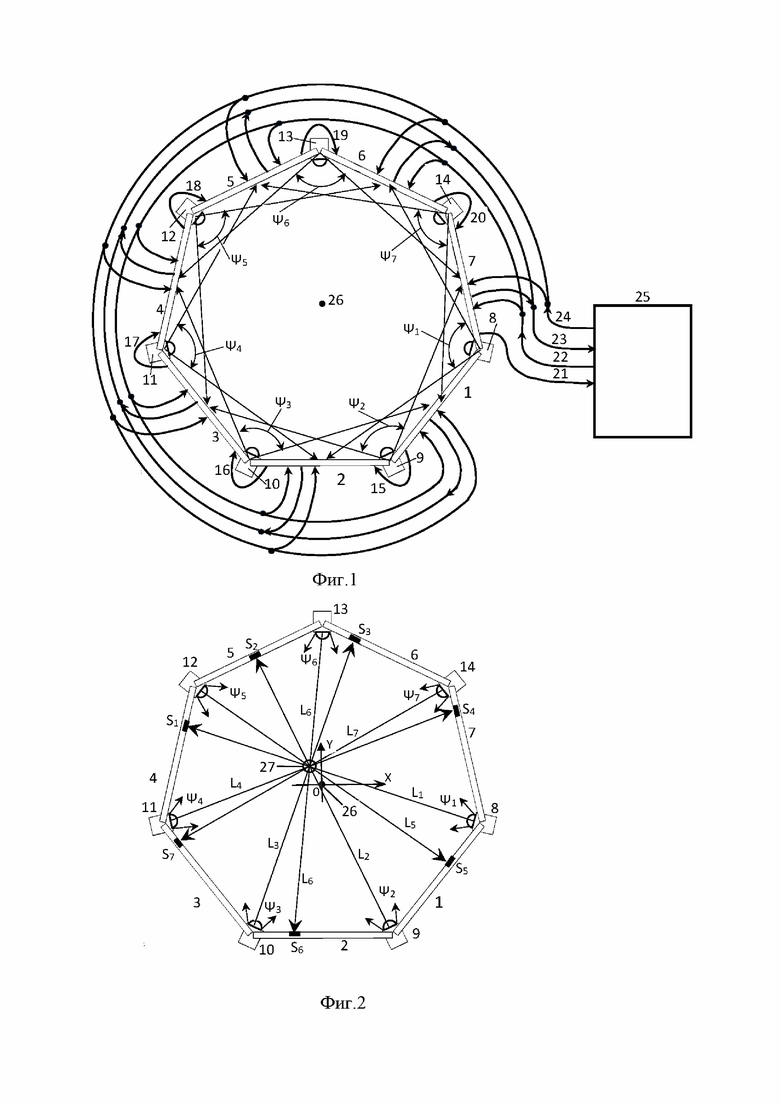
Фиг. 1. Функциональная схема устройства, где:
1, 2, 3, 4, 5, 6, 7 - модули фиксации координат теней;
8, 9, 10, 11, 12, 13, 14-излучатели;
ψ1., ψ2, ψ3, ψ4, ψ5, ψ6, ψ7 - телесные потоки, формируемые излучателями 8, 9, 10, 11, 12, 13, 14 соответственно;
15, 16, 17, 18, 19, 20 - сигнальные линии, связывающие первые выходы модулей фиксации координат теней 1, 2, 3, 4, 5, 6 соответственно, с третьими входами модулей фиксации координат теней 2, 3, 4, 5, 6, 7 соответственно;
21 - линия связи второго входа вычислительного устройства 25 с вторым выходом 7-го модуля фиксации координат теней;
22 - линия связи вторых входов модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7 с вторым выходом вычислительного устройства 25;
23 - линия связи первого входа вычислительного устройства 25 с первым выходом модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7;
24 - линия связи первого выхода вычислительного устройства 25 с первыми входами модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7;
25 - вычислительное устройство:
26 - оптический центр плоскости фиксации координат выстрела.
Фиг. 2. Оптико-геометрическая схема образования теней на поверхностях модулей фиксации координат теней, где:
27 - положение пули при пересечении ею плоскости регистрации координат выстрела;
S1, S2, S3, S4, S5, S6, S7 - теневые сегменты, образуемые при пересечении пулей оптических потоков Ψ1, ψ2, ψ3, ψ4, ψ5, ψ6, ψ7 соответственно;
L1, L2, L3, L4, L5, L6, L7 - линии соединяющие начальные точки излучения потоков Ψ1, Ψ2, ψ3, ψ4, ψ5, ψ6, ψ7 с центрами теневых сегментов S1, S2, S3, S4, S5, S6, S7 соответственно.
0XY - система координат, связанная с оптическим центром 26.
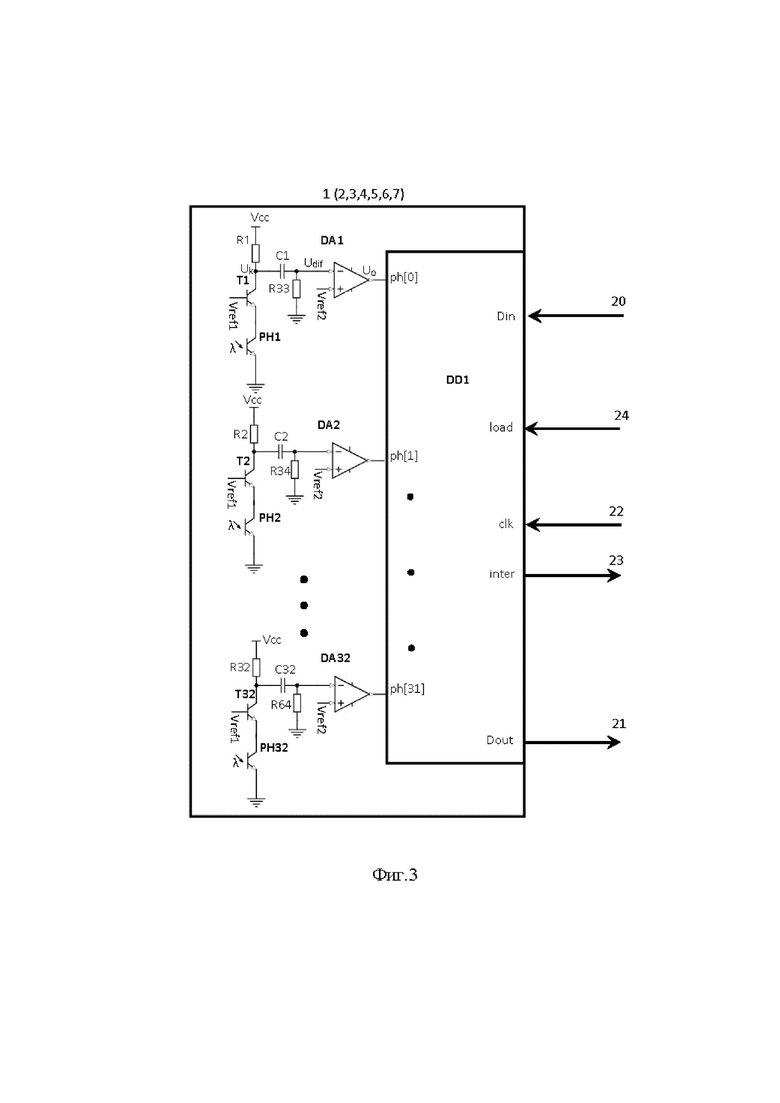
На фиг.3 приведен пример выполнения одного из 7-ми модулей фиксации координат теней и передачи состояния 32 фотоприемников, образующих линейный приемный массив, где:
Т1…Т32 - транзисторы усилителя фототоков;
РН1…РН32- фотоприемники (фототранзисторы);
R1…R32 - нагрузочные резисторы;
С1…С32 - конденсаторы;
R33…R64 - резисторы;
DA1…DA32 - интегральные микросхемы компараторов напряжения;
DD1 - программируемая логическая интегральная схема (ПЛИС);
ph[0]…ph[31] - входные сигналы состояния фотоприемников РН1…РН32;
Din - входной сигнал данных;
Dout - выходной сигнал данных;
inter - импульс прерывания;
load - сигнал загрузки;
clk импульс сдвига;
Uk сигнал на коллекторном выводе транзистора Т1;
Vref1 - опорное напряжение, задающее рабочий ток транзистора Т1;
Vref2 опорное напряжение (напряжение сравнения) компаратора DA1;
Uo - сигнал на выходе компаратора DA1;
На фиг.4 приведены графики сигналов, вырабатываемых в модулях фиксации координат теней 1, 2, 3, 4, 5, 6, 7, при прохождении пулей плоскости фиксации выстрелов, где:
П(t1), П(t2), П(t3), П[t4), П[t5) - положение пули П в моменты времени t1, t2, t3, t4, t5 соответственно;
tH - момент перехода выхода компаратора DA1 в низкий уровень;
tK- момент перехода выхода компаратора DA1 в высокий уровень;
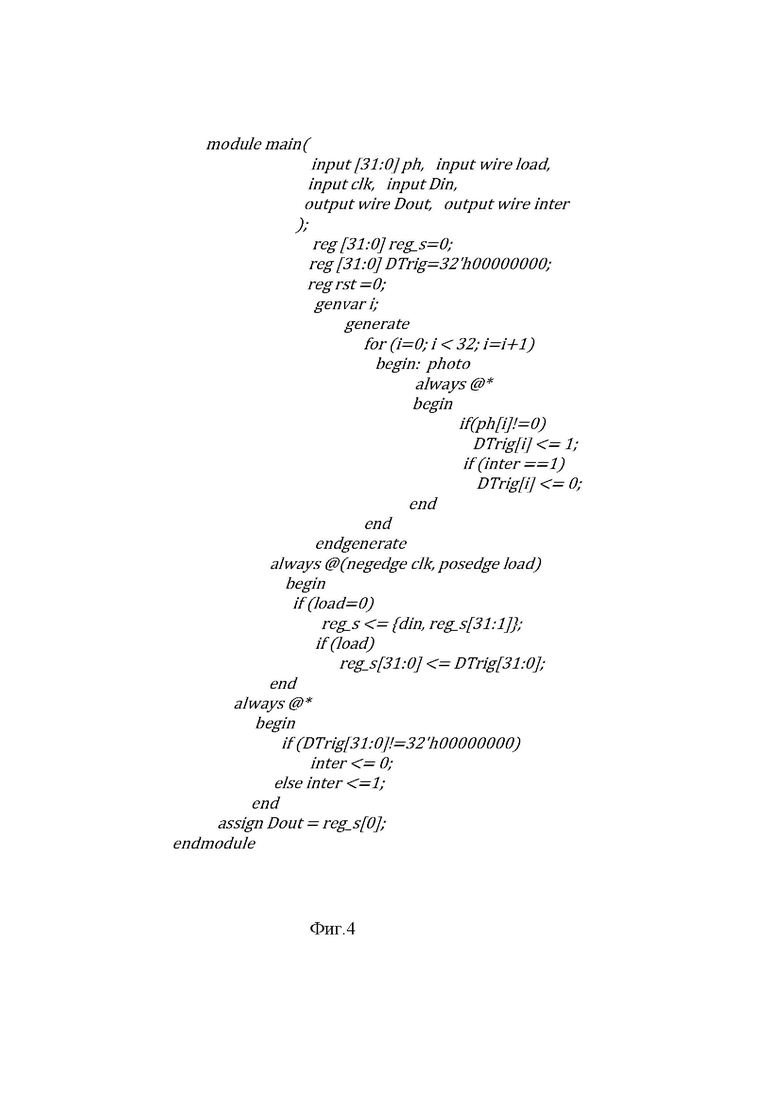
На фиг.5 приведено аппаратное описание работы ПЛИС DD1, на языке Verilog.
На фиг.6 представлена 3D-модель практической реализации модулей фиксации 1, 2, 3, 4, 5, 6, 7, полученная в среде проектирования Altium Designer
На фиг.7 приведена фотография макетной реализации предлагаемой многолучевой мишени.
Принцип работы многолучевой стрелковой мишени, функциональная схема которой приведена на фиг.1, основан на определении координат точек пересечения линий, связывающих центры теней с соответствующими излучателями, формирующими эти тени.
Изображенная на фиг.1 функциональная схема многолучевой мишени содержит набор модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7, которые размещены таким образом, что охватывают плоскость, в которой происходит фиксация положения пули, пересекающей эту плоскость в процессе пролета. Все, входящие в устройство модули фиксации координат теней, связаны тремя сигнальными линиями с вычислительным устройством 25, а именно, линия:
21 - входной сигнал со второго выхода модуля фиксации координат теней 7 со вторым входом вычислительного устройства 25;
22 - тактовый сигнал, со второго выхода вычислительного устройства 25 со вторыми входами модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7;
23 - сигнал прерывания работы вычислительного устройства 25, поступающий на его 1 -вход с первых выходов модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7;
24 - сигнал передачи состояния накопительных 32-битных регистров DTrig[31:0], в 32-битные сдвиговые регистры reg_s[31:0] модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7;
Кроме того, все модули фиксации координат теней имеют входной и выходной сигнальные выводы для последовательного приема и передачи информации, тактируемой сигналом по линии 22 от вычислительного устройства 25, которое является ведущим в организации приема информации, накопленной в модулях 1, 2, 3, 4, 5, 6, 7. При этом вторые выводы (выходные) модулей фиксации координат теней 1, 2, 3, 4, 5, 6 соединены с третьими (входными) выводами ближайших к ним модулей фиксации координат теней 2, 3, 4, 5, 6, 7 соответственно, а второй (выходной) вывод модуля фиксации 7, соединен со вторым входом вычислительного устройства 25.
На фиг.2, представлено, как световые потоки Ψ1, Ψ2, ψ3, ψ4, ψ5, ψ6, ψ7 создают теневые сегменты S1, S2, S3, S4, S5, S6, S7 соответственно. При этом пересечение любой пары линий L1, L2, L3, L4, L5, L6, L7 определяет центральную точку 27 нахождения пули в момент пересечения ею плоскости фиксации координат выстрела. А именно это: пара 1- (Ll, L2), пара 2- (L1, L3), пара 3-(Ll, L4), пара 4 -(L1, L5), пара 5-(L1, L6), пара 6-(L1, L7), пара 7-(L2, L3), пара 8- (L2, L4), пара 9- (L2, L5), пара 10- (L2, L6), пара 11- (L2, L7), пара 12- (L3, L4), пара 13- (L3, L5), пара 14- (L3, L6), пара 15- (L3, L7), пара 16- (L4, L5), пара 17- (L4, L6), пара 18- (L4, L7), пара 19- (L5, L6), пара 20- (L5, L7), пара 21- (L6, L7).
Таким образом имеется 21 независимое решение системы уравнений по определению точек пересечения этих пар прямых.
При этом, метод усреднения многократных отсчетов, позволяет повысить точность измерения координат, более чем в 20 раз, по сравнению с единичным измерением, а также уменьшить дисперсию более чем в 4 раза [8, формулы 4.1, 4.2)].
На фиг.3 представлен фрагмент принципиальной схемы обработки сигналов фотоприемников (фототранзисторов) РН1-PH32. Уменьшение светового потока, вызываемое прохождением затенения над поверхностями фотоприемников, изображенное на фиг.4, вызывает изменение сигнала Uk. Прохождение этого сигнала через дифференцирующую цепочку C1R33 (фиг.3), вызывает на ее выходе сигнал Udif. Превышение сигналом Udif уровня Vref2, вызывает появление на выходе компаратора DA1 импульса низкого уровня UO, изображенного на фиг.4. При этом отсутствие засветки хотя бы одного фотоприемника (т.е. появление тени минимального размера), вызывает появление низкого уровня сигнала прерывания inter.
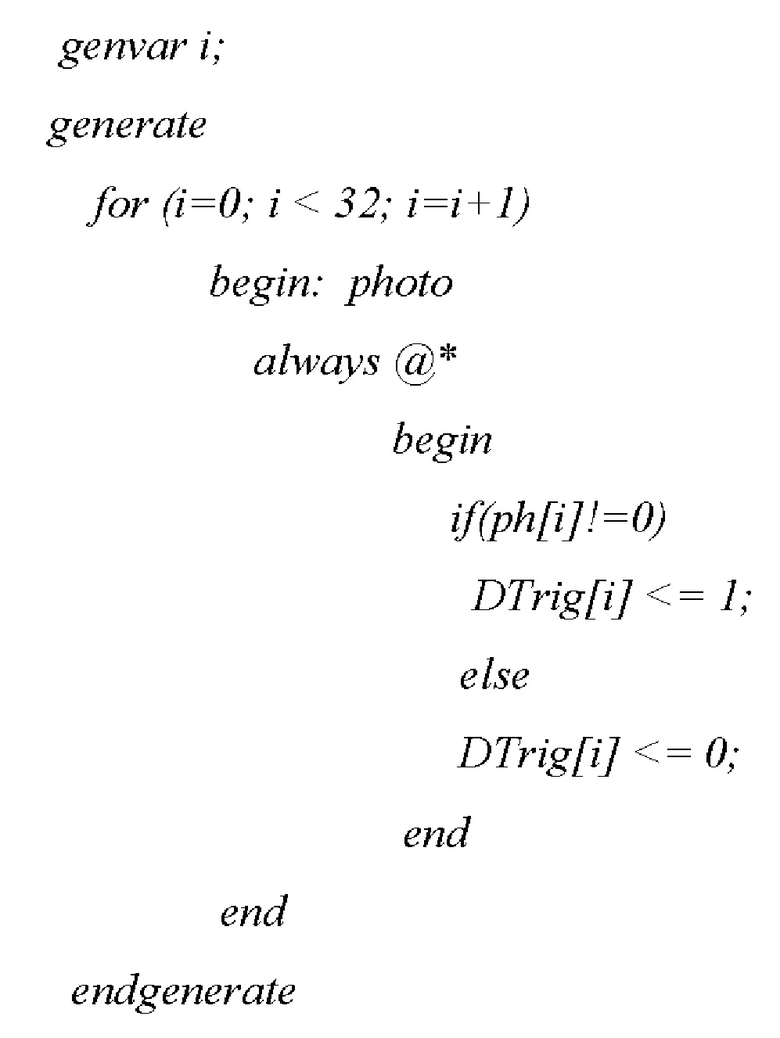
Алгоритм функционирования аппаратуры ПЛИС DD1 (фиг.3) на языке Verilog приведен на фиг.5. В ходе его реализации, осуществляется обработка 32-х асинхронных входных (input[31:0]) сигналов ph[0]…ph[31], низкий уровень сигнала которых соответствует затенению соответствующего фототранзистора, а высокий - их засветки.
При этом изменение их логических уровней с «1» в «0» вызывает соответствующее изменение состояния накопительного 32-битного регистра DTrig[31:0], согласно нижеследующего фрагмента:
Следующий фрагмент описывает аппаратную выработку сигнала прерывания inter:
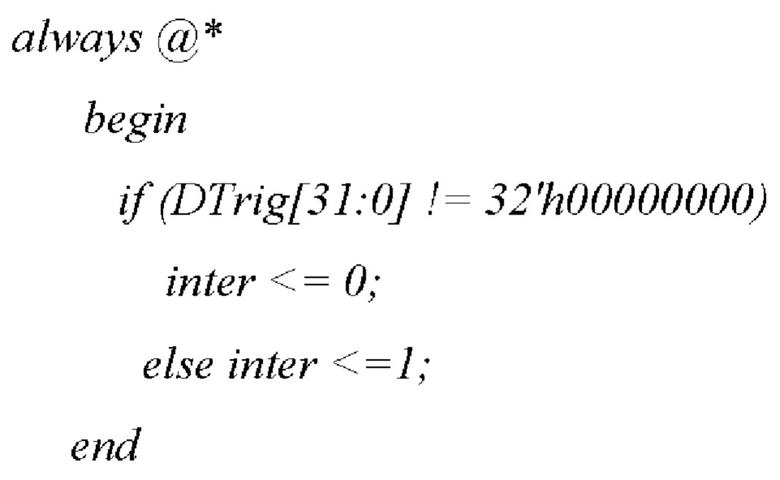
Активный низкий уровень сигнала inter является «монтажным ИЛИ», объединяет все одноименные сигналы модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7 и поступает на второй вход вычислительного устройства 25. Этот вход вычислительного устройства 25 сконфигурирован таким образом, что вызывает прерывание выполнения текущей задачи и переход к вводу информации, накопленной модулями фиксации координат теней 1, 2, 3, 4, 5, 6, 7.
Для обеспечения функционирования «монтажного ИЛИ», выход сигнала inter должен быть сконфигурирован в ПЛИС DD1 как выход с «открытым коллектором» («Open_Drain»).
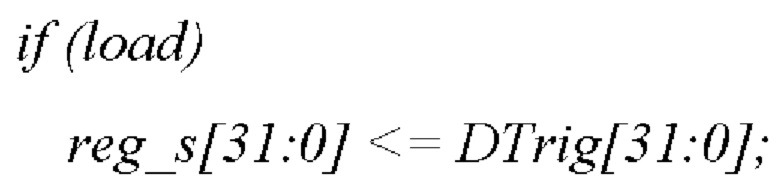
В ходе обработки прерывания, вычислительное устройство 25 вырабатывает сигнал load, который записывает состояние регистра DTrig[31:0] в сдвиговый регистр reg_s[31:0], реализуемое следующим фрагментом:
Побитовый вход информации - Dout, поступающей на второй вход вычислительного устройства 25 с второго выхода модуля фиксации координат теней 7 по линии 21, осуществляется синхронно с тактовым импульсом clk. Тактовый импульс clk положительной полярности вырабатывается вычислительным устройством 25 и поступает на модули фиксации координат теней 1, 2, 3, 4, 5, 6, 7 по линии 22 с второго выхода. По переднему фронту импульса clk, вычислительное устройство 25
считывает в память, состояние сигнала на линии 21 (для модуля фиксации координат теней 7).
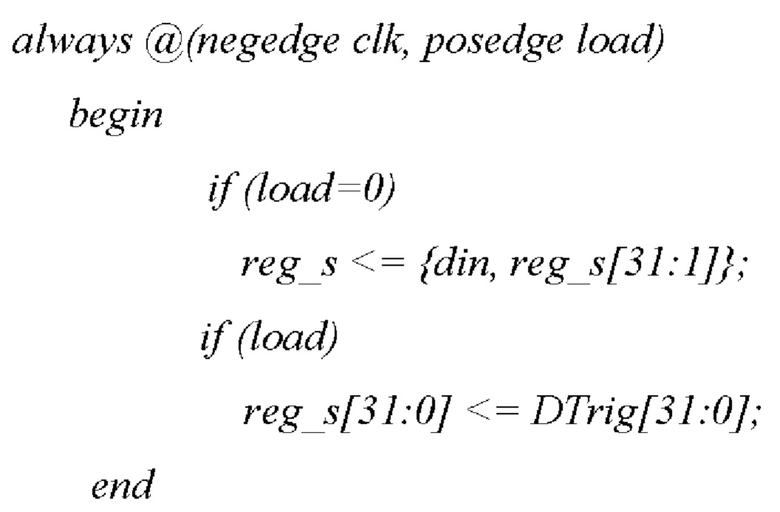
Кроме того, по заднему фронту тактового импульса clk происходит сдвиг данных в сдвиговом регистре reg_s[31:0] с одновременной записью в него состояния входного сигнала Din (связанного с выходом Dout соседнего модуля фиксации координат теней линиями 9, 10, 11, 12, 13, 14), что иллюстрирует нижний фрагмент:
Так как уменьшение освещенности соответствующих фотоприемников, начиная с момента времени t1, вызывает изменение сигнала Uk, в момент времени tn вырабатывается сигнал inter (активной низкой полярностью), поступающий далее по линии 23 на вход прерывания вычислительного устройства 25.
Данная функция реализуется следующим аппаратным решением в ПЛИС DDI: 
На фиг. 6 показан пример практической реализации модулей фиксации координат теней 1, 2, 3, 4, 5, 6, 7 содержащей 32 фототранзистора КР-3216РЗС, 8 четырехканальных компаратора LM232DR и ПЛИС типа XC9572XL-10VQ64 (CPLD фирмы AMD) [9].
В случае необходимости, например для увеличения зоны регистрации, количество модулей фиксации координат теней может быть увеличено до требуемых размеров.
Кроме того, может быть увеличено и количество излучателей, что увеличит количество линий L, а следовательно, и количество пар их пересечений, что соответственно еще больше повысит точность определения координат центральной точки 27.
Так же следует отметить возможность технической реализации модулей фиксации координат теней в виде криволинейной поверхности, например на гибкой печатной плате, либо с помощь нескольких печатных плат, стыкуемых под углом друг к другу. Это позволит еще больше уменьшить габаритный размер предлагаемой стрелковой мишени.
На фиг. 7 приведен пример выполнения макета многолучевой стрелковой мишени, изготовленной согласно предложенной функциональной схемы. Вычислительное устройство 25 выполнено на основе микроконтроллера ATmega48AU [10], а каждый из модулей фиксации выполнен в виде 2-х, пристыкованных под углом друг к другу печатных плат.
Источники информации
1. LS25/50 LASERSCORE. The fully optical target for 25m and 50m pistol and small bore rifle.
https://www.sius.com/en/product-page/ls25-50-laserscore/ (дата последнего обращения 12.07.2024 г. )
2. https://www.swissdis.ch/fileadmin/media/pdf-dokumente-
2017/Polyscope_Bericht.pdf (дата последнего обращения 12.07.2024 г. )
3. Патент US № 10175033 от 8.01.2019 г.
4. Патент РФ № 2213320 от 24.06.2002 г.
5. Патент US № 5637866 от 10.06.1997 г.
6. Патент US №6717684 от 6.04.2004 г.
7. Патент РФ № 2806533 от 18.19.2022 г.
8. Новицкий Н.Ф., Зограф И.А. Оценка погрешностей результатов измерений. Энергоатомиздат. Ленингр. отделение, 1991 г. https://disk.yandex.ru/i/zb_TD6BaEx7SLA (дата последнего обращения 17.07.2024 г.)
9. XC9572XL High Performance CPLD Product Specification https://docs.amd.eom/v/u/en-US/ds057 (дата последнего обращения 12.07.2024 г. )
10. https://wwl.microchip.com/downloads/en/DeviceDoc/Atmel-7530-Automotive-Microcontrollers-ATmega48-ATmega88-ATmegal68_Datasheet.pdf (дата последнего обращения 12.07.2024 г.)
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронная стрелковая мишень модульного типа | 2022 |
|
RU2806533C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ СКОРОСТИ | 2014 |
|
RU2575388C1 |
| СПОСОБ ГЕНЕРАЦИИ БАЗ ЗНАНИЙ ДЛЯ СИСТЕМ ВЕРИФИКАЦИИ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ РАСПРЕДЕЛЕННЫХ ВЫЧИСЛИТЕЛЬНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2364930C2 |
| Способ и система децентрализованного измерения интервалов времени переноса сигнала между подвижными объектами и определения их местоположения | 2020 |
|
RU2731630C1 |
| ФУРЬЕ-СПЕКТРОМЕТР | 1994 |
|
RU2100786C1 |
| МАЛОГАБАРИТНЫЙ ГАРАЖ | 1994 |
|
RU2072418C1 |
| НОЖ ХОЗЯЙСТВЕННО-ТУРИСТИЧЕСКИЙ "СИБИРСКИЙ МЕДВЕДЬ" | 1996 |
|
RU2091209C1 |
| ЛИНЕЙНАЯ ЦИКЛИЧЕСКАЯ ПИЛА ПО МЕТАЛЛУ | 2023 |
|
RU2811348C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ РЕЗУЛЬТАТОВ СТРЕЛЬБЫ ПРИ ОПРЕДЕЛЕНИИ КООРДИНАТ ПРОЛЕТА ПУЛИ | 1992 |
|
RU2068538C1 |
| ДОМЕНЫ И ЭПИТОПЫ МЕНИНГОКОККОВОГО БЕЛКА NMB1870 | 2005 |
|
RU2375374C2 |
Предлагаемая многолучевая стрелковая мишень относится к технике построения спортивных мишеней для тренировок и соревнований с использованием огнестрельного и пневматического оружия. Расположение модулей фиксации координат теней выполнено в виде замкнутой кривой, образующей первый правильный многоугольник, внутри которого расположена зона регистрации попаданий. Кроме того, данная мишень содержит множество излучателей, оптически сопряженных с модулями фиксации координат теней и расположенных в вершинах второго правильного многоугольника, центр которого совпадает с центром первого многоугольника. Однотипные модули фиксации координат теней содержат линейные массивы фотоприемников, входной и выходной порты приема и передачи информации, специализированное устройство обработки оптических сигналов, выполненное на базе программируемой логической интегральной схемы и связанное с соответствующими портами соседних модулей и с вычислительным устройством. Технический результат - увеличение точности измерения координат попадания за счет многолучевого пересечения центров теней, отбрасываемых пролетающей пулей при усреднении независимых координат точек пересечения. 2 з.п. ф-лы, 7 ил.
1. Многолучевая стрелковая мишень, содержащая модули фиксации координат теней, оптически сопряженный с ними набор излучателей, а также вычислительное устройство, первый вход которого связан с первыми выходами модулей фиксации координат теней, а первый выход вычислительного устройства поступает на первые входы модулей фиксации координат теней, кроме того, модули фиксации координат теней соединены друг с другом цепочкой так, что второй выход каждого модуля фиксации координат теней подключен к третьему входу соседнего модуля фиксации координат теней, причем второй выход последнего из модулей фиксации координат теней подключён к второму входу вычислительного устройства, отличающаяся тем, что модули фиксации координат теней размещены так, что образуют правильный многоугольник, охватывающий плоскость фиксации координат точки попадания, а каждый из группы излучателей размещен в вершинах второго правильного многоугольника, причем первый и второй многоугольники имеют общий геометрический центр.
2. Многолучевая стрелковая мишень по п.1, содержащая модуль фиксации координат теней, который содержит линейный массив фотоприемников, подключённых ко входам соответствующих компараторов, выходы которых, в свою очередь, связаны со входам регистра данных, фиксирующего изменение освещенности фотоприемников от засвеченного в затемнённое, и, кроме того, содержит схему логического ИЛИ входных сигналов с выходов компараторов, которая вырабатывает активный низкий логический уровень при по меньшей мере одном затемненном фотоприемнике, причем этот сигнал, поступая на первый выход модуля фиксации, объединен «монтажным ИЛИ» с аналогичными выходами остальных модулей фиксации координат теней и также связан с первым входом вычислительного устройства, низкий уровень сигнала на котором вызывает прерывание исполнения текущей программы вычислительного устройства и по которому оно вырабатывает сигнал записи содержимого регистров данных в регистры сдвига, поступающий одновременно на все модули фиксации координат теней, и затем вычислительное устройство формирует тактовые сигналы сдвига, также поступающие одновременно на все модули фиксации координат теней, которые побитно сдвигают содержимое сдвигового регистра в направлении входа данных вычислительного устройства, при этом в память вычислительного устройства вводятся зафиксированные в модулях фиксации координат теней состояния освещенности фотоприемников, а далее, после ввода в вычислительное устройство накопленной в модулях фиксации информации, вычислительное устройство определяет координаты точки попадания пули в зоне регистрации.
3. Многолучевая стрелковая мишень по пп.1, 2, содержащая модуль фиксации координат теней, который выполнен с помощь нескольких печатных плат, стыкуемых под углом друг к другу.
| Оптико-электронная стрелковая мишень модульного типа | 2022 |
|
RU2806533C1 |
| RU 2021104019 A, 17.08.2022 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВНЕШНЕБАЛЛИСТИЧЕСКИХ ПАРАМЕТРОВ МЕТАТЕЛЬНОГО ЭЛЕМЕНТА С ПОМОЩЬЮ ФОТОЛИНЕЕК И СВЕТОВЫХ ЭКРАНОВ | 2005 |
|
RU2278388C1 |
| US 5637866 A1, 10.06.1997 | |||
| US 4205846 A1, 03.06.1980. | |||

