Изобретение относится к дистанционно-управляемым боевым роботизированным комплексам, предназначенным для решения задач силовых структур РФ, в частности к способам их алгоритмического и программного обеспечения при управлении движением.
Известна автоматическая система управления движением мобильного объекта и способ автоматического управления движением мобильного объекта (см. патент RU 2451593 C2, МПК B25J 5/00, опубл. 27.05.2012 г.), принятый за прототип. Автоматическая система управления движением мобильного объекта содержит блок обработки цифровых параметрических сигналов, установленный на мобильном объекте, блок с нечеткой логикой, включающий базу правил нечетких продукций и систему нечеткого вывода, блок с реализованными на нем программно или аппаратно-нейронными сетями, корректирующими графики функций принадлежностей, и коммутирующий контроллер. Система снабжена блоком обработки видеосигналов, вход которого соединен с камерами системы технического зрения, установленными на мобильном объекте, блоком анализа и кластеризации, входы которого соединены с блоком обработки цифровых параметрических сигналов и блоком обработки видеосигналов, блоком с программно или аппаратно-реализованным первым генетическим алгоритмом, настраивающим базы правил нечетких продукций, вход и выход которого связаны с блоком с нечеткой логикой, блоком с программно или аппаратно-реализованным вторым генетическим алгоритмом, настраивающим нейронные сети, вход и выход которого связаны с блоком с нейронными сетями, при этом вход и выход блока с нейронными сетями связан с блоком с нечеткой логикой.
Способ автоматического управления движением мобильного объекта включает создание исходных баз правил нечетких продукций для множества сценариев развития ситуаций, предварительное обучение автоматической системы управления выполнению задач, связанных с движением мобильного объекта в условиях изменяющейся окружающей среды, и выработку управляющих сигналов для исполнительных органов мобильного объекта, при этом предварительное обучение системы управления осуществляют с применением первого генетического алгоритма, который вырабатывает наилучший вариант базы правил нечетких продукций для каждого сценария развития ситуации, и второго генетического алгоритма, который для каждого сценария развития ситуации вырабатывает наилучший вариант нейронной сети для каждой выходной лингвистической переменной, причем данные с выработанным наилучшим вариантом базы правил передают в блок с нечеткой логикой и заменяют исходный вариант базы правил для данного сценария, данные с выработанным наилучшим вариантом нейронной сети для каждой выходной лингвистической переменной передают в блок с нейронными сетями и заменяют исходную нейронную сеть для данной выходной лингвистической переменной для данного сценария, а выработку управляющих сигналов для исполнительных органов в зависимости от ситуации осуществляют блоком с нечеткой логикой на основе измененных баз правил и откорректированных графиков функций принадлежности.
Недостатками прототипа являются:
- недостаточная точность отработки комплексом управляющих сигналов при движении;
- высокая вероятность возникновения аварийных ситуаций при преодолении препятствий при движении;
- отсутствие возможности введения в систему управления объектом поправочных коэффициентов;
- высокая сложность системы управления, в которой реализуется способ.
Предлагаемым изобретением решается задача по повышению живучести подвижных роботизированных комплексов за счет оптимизации алгоритмов управления движением.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа определения угла поворота мобильного робототехнического комплекса при преодолении препятствий, обеспечивающего обнаружение и определение дальности до препятствия, возникающего на пути движения мобильного роботизированного комплекса, определение с высокой точностью угла поворота для выбора дальнейшего направления движения.
Указанный технический результат достигается тем, что в предлагаемом способе определения угла поворота мобильного робототехнического комплекса при преодолении препятствий, включающем работу системы управления по выполнению задач, связанных с движением мобильного объекта в условиях изменяющейся окружающей среды, обработку данных с датчиков, выработку управляющих сигналов для исполнительных органов мобильного объекта, новым является то, что для реализации задачи обнаружения препятствий, возникающих на пути движения мобильного робототехнического комплекса, используются ультразвуковые датчики, установленные по периметру комплекса, для которых перед началом движения в системе управления задается предельная дальность обнаружения препятствия и вводится зона гистерезиса, когда расстояние до препятствия находится на границе зоны обнаружения, после выбора основного направления движения и начала движения осуществляется непрерывная обработка данных с ультразвуковых датчиков, после обнаружения препятствия выполняется решение задачи определения угла поворота комплекса для выполнения маневра по объезду препятствия, для чего в состав комплекса введен аналоговый датчик угловой скорости - микромеханический гироскоп, для исключения влияния на точность вычисления угла поворота перед использованием комплекса проводятся калибровочные работы, складывающиеся из двух частей: первой - калибровка «нуля» датчика и принятие постоянной поправки X к значению угловой скорости, второй - нахождение масштабных коэффициентов К1, К2 для вычисления значений угла поворота, для получения требуемой точности выполняется предварительная фильтрация оцифрованного сигнала угловой скорости по методу скользящего среднего, а для получения значения угла - численное интегрирование значения угловой скорости с учетом коэффициента К.
Использование для реализации задачи обнаружения препятствий ультразвуковых дальномеров, установленных по периметру комплекса, позволяет:
- обеспечить максимальный «захват» возникающих при движении препятствий в зону контроля;
- обеспечить обнаружение препятствий любой конфигуративной сложности;
- предотвратить столкновение комплекса с обнаруженными препятствиями;
- обеспечить обнаружение объектов при наличии атмосферных осадков.
Введение перед началом движения в систему управления предельной дальности обнаружения препятствия и зоны гистерезиса позволяет:
- обеспечить оптимальные размеры контролируемой зоны, что снижает вероятность возникновения аварийных ситуаций и позволяет своевременно выполнить маневр по объезду препятствия;
- исключить эффект «дребезга» при изменении направления движения, когда расстояние до препятствия находится на границе зоны обнаружения.
Выполнение задачи определения угла поворота комплекса с использованием аналогового датчика угловой скорости - микромеханического гироскопа - позволяет:
- провести определение угла поворота и дальнейшую его отработку без чрезмерного усложнения конструкции комплекса;
- получить достаточно высокие точностные характеристики.
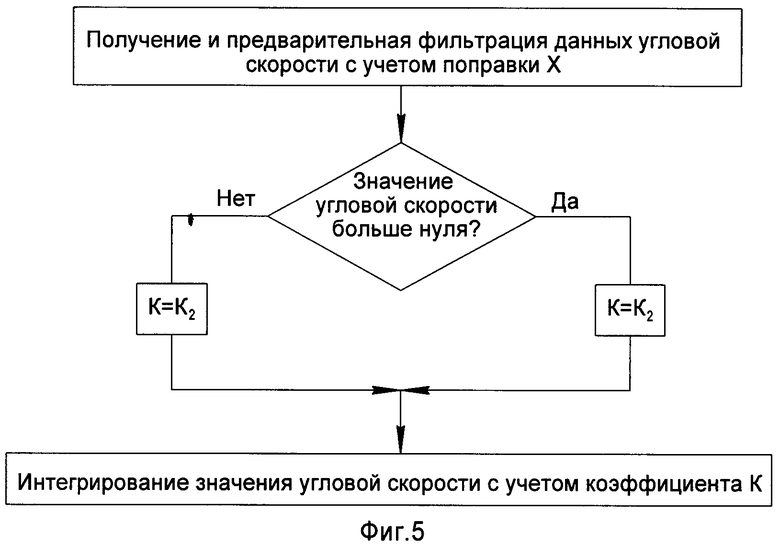
Проведение калибровки «нуля» датчика и принятие постоянной поправки X к значению угловой скорости позволяет снизить влияние на точность вычисления угла поворота погрешности датчика угловой скорости.
Нахождение масштабных коэффициентов К1, К2 для вычисления значений угла поворота позволяет:
- выполнить привязку реального угла поворота датчика к вычисленному;
- устранить ошибку масштабных коэффициентов шкалы датчика.
Выполнение предварительной фильтрации оцифрованного сигнала угловой скорости и численного интегрирования с учетом коэффициента К позволяет получить окончательное значение угловой скорости.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
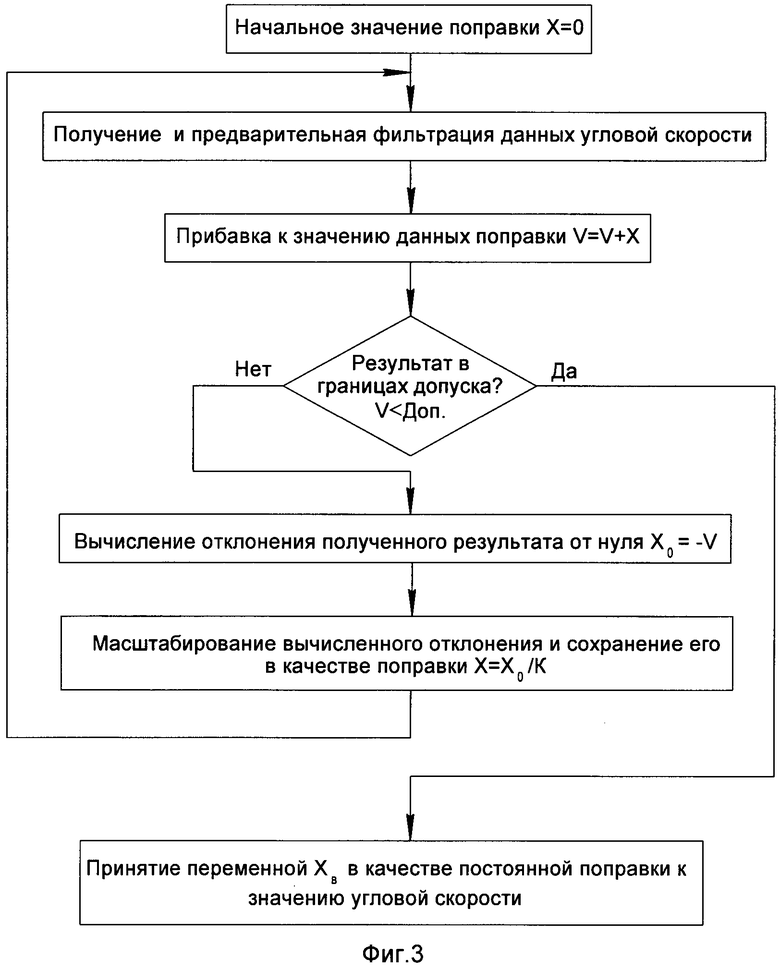
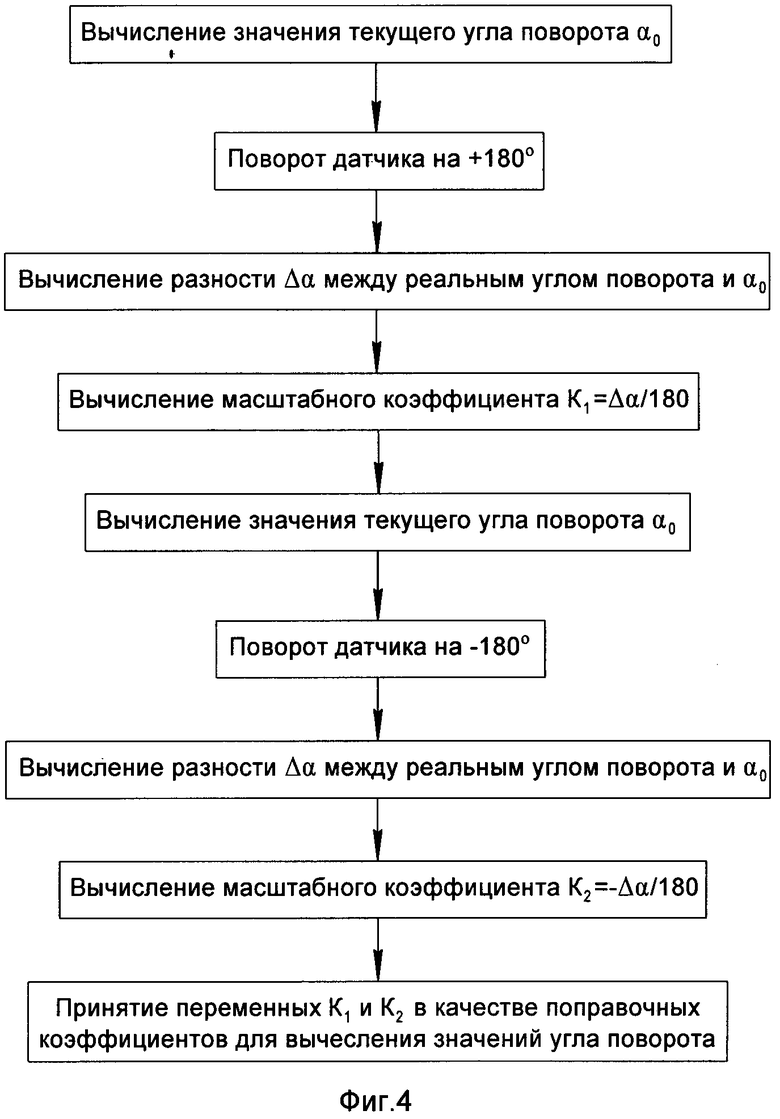
Сущность изобретения поясняется чертежами, где на фиг. 1 показан алгоритм работы ультразвуковых датчиков; на фиг. 2 - подпрограмма 1; на фиг. 3 - алгоритм калибровки «нуля» датчика; на фиг. 4 - алгоритм нахождения масштабных коэффициентов; на фиг. 5 - алгоритм вычисления угла поворота.
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий реализуется следующим образом.
1. Для реализации задачи обнаружения препятствий, возникающих на пути движения мобильного робототехнического комплекса (МРК), используются ультразвуковые дальномеры (УЗД), установленные по периметру МРК.
Получение и обработка данных УЗД заключается в измерении электрических сигналов с датчиков (TTL, ШИМ-сигнал с частотой 50 Гц и скважностью 1000-2000 мкс) и переводе значения скважности в метры.
2. Перед началом движения МРК в его системе управления задается предельная дальность обнаружения препятствия исходя из условий местности и технических возможностей УЗД.
3. Далее вводится зона гистерезиса. Введение зоны гистерезиса необходимо для исключения эффекта «дребезга», когда расстояние до препятствия находится на границе зоны обнаружения препятствия.
4. Перед началом движения выбирается основное направление движения: «вперед/назад». При движении «вперед» используются данные 3-х носовых УЗД, при движении «назад» - 3-х кормовых УЗД, которые обрабатываются посредством подпрограммы 1.
5. После обнаружения препятствия возникает необходимость решения задачи определения угла поворота для выполнения маневра по объезду препятствия. Для этого используются аналоговый датчик угловой скорости (ДУС), плата обработки данных (ПОД), поворотное устройство (ПУ), установленные на подвижной части МРК. Поворотное устройство состоит из редуктора, электродвигателя, датчика обратной связи и платы управления, размещенных в едином корпусе, что позволяет поворачивать выходной вал на точный заданный угол.
ДУС представляет собой микромеханический гороскоп с аналоговым выходным сигналом, пропорциональным угловой скорости вращения датчика вдоль оси чувствительности. Причем при использовании аналогового ДУС имеют место следующие недостатки:
- зашумленность аналогового сигнала с датчика;
- при неподвижном положении датчика его выходное напряжение, соответствующее значению нулевой угловой скорости («ноль» датчика), равно фиксированному значению 2,5 В. Однако, в зависимости от условий окружающей среды (непостоянство температуры, давления и др.), напряжение может изменяться в некотором диапазоне. При вычислении угла поворота ошибка значения «нуля» датчика дает значительную ошибку значения угла, нарастающую со временем;
- при вращении датчика с одинаковыми угловыми скоростями, но в разных направлениях, значения выходного напряжения датчика отличаются по амплитуде, что означает разные масштабные коэффициенты для знака угловой скорости.
Для исключения влияния вышеперечисленных недостатков на точность вычисления угла поворота перед использованием МРК проводятся калибровочные работы, складывающиеся из двух частей.
6. Первая часть калибровки - калибровка «нуля» датчика. Она включает в себя последовательное вычисление поправки X к значению угловой скорости V во время неподвижного положения МРК.
7. Вторая часть калибровки - нахождение масштабных коэффициентов К1, К2 при вычислении угла поворота датчика. ДУС, установленный на поворотной платформе МРК, поворачивается на углы ±180 градусов. При этом сам МРК находится в неподвижном состоянии. Вращая датчик на ПУ (в обе стороны), осуществляют привязку значения реального угла поворота к вычисленному α0, тем самым устраняется ошибка масштабных коэффициентов шкалы датчика.
8. Для получения требуемой точности при ограниченной вычислительной мощности системы для предварительной фильтрации оцифрованного сигнала угловой скорости используется метод скользящего среднего, а для получения значения угла - численного интегрирования методом трапеций. Вычисление масштабных коэффициентов происходит параллельно с вычислением относительного угла поворота.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа определения угла поворота мобильного робототехнического комплекса при преодолении препятствий, обеспечивающего обнаружение и определение дальности до препятствия, возникающего на пути движения мобильного роботизированного комплекса, определение с высокой точностью угла поворота для выбора дальнейшего направления движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| БЛОК СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2567094C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА БОЕВОГО ПРИМЕНЕНИЯ | 2013 |
|
RU2523874C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| Способ и устройство мобильного робота для прохождения замкнутых контуров и лабиринтов | 2017 |
|
RU2670826C9 |
| СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОГО КАНАЛА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ И СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ | 2014 |
|
RU2547633C1 |
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |

Для реализации задачи обнаружения препятствий, возникающих на пути движения мобильного робототехнического комплекса, используют ультразвуковые датчики, установленные по периметру комплекса. Перед началом движения в системе управления задают предельную дальность обнаружения препятствия и вводят зону гистерезиса, когда расстояние до препятствия находится на границе зоны обнаружения. После выбора основного направления движения и начала движения осуществляют непрерывную обработку данных с ультразвуковых датчиков. После обнаружения препятствия определяют угол поворота комплекса для выполнения маневра по объезду препятствия, для чего в состав комплекса введен аналоговый датчик угловой скорости - микромеханический гироскоп. Для исключения влияния на точность вычисления угла поворота перед использованием комплекса проводят калибровочные работы, складывающиеся из двух частей. Первая - калибровка «нуля» датчика и принятие постоянной поправки X к значению угловой скорости. Вторая - нахождение масштабных коэффициентов К1, К2 для вычисления значений угла поворота. Для получения требуемой точности выполняют предварительную фильтрацию оцифрованного сигнала угловой скорости по методу скользящего среднего. Для получения значения угла - численное интегрирование значения угловой скорости с учетом коэффициента К. Достигается определение с высокой точностью угла поворота для выбора дальнейшего направления движения. 5 ил.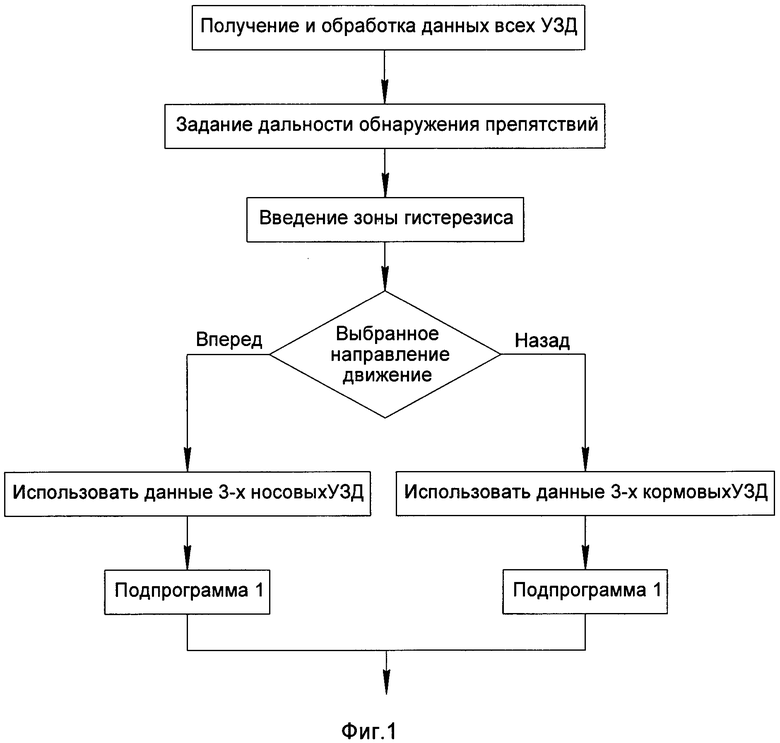
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий, включающий работу системы управления по выполнению задач, связанных с движением мобильного объекта в условиях изменяющейся окружающей среды, обработку данных с датчиков, выработку управляющих сигналов для исполнительных органов мобильного объекта, отличающийся тем, что для реализации задачи обнаружения препятствий, возникающих на пути движения мобильного робототехнического комплекса, используются ультразвуковые датчики, установленные по периметру комплекса, для которых перед началом движения в системе управления задается предельная дальность обнаружения препятствия и вводится зона гистерезиса, когда расстояние до препятствия находится на границе зоны обнаружения, после выбора основного направления движения и начала движения осуществляется непрерывная обработка данных с ультразвуковых датчиков, после обнаружения препятствия выполняется решение задачи определения угла поворота комплекса для выполнения маневра по объезду препятствия, для чего в состав комплекса введен аналоговый датчик угловой скорости - микромеханический гироскоп, плата обработки данных, поворотное устройство, установленные на подвижной части МРК, поворотное устройство состоит из редуктора, электродвигателя, датчика обратной связи и платы управления, размещенных в едином корпусе, что позволяет поворачивать выходной вал на точный заданный угол, для исключения влияния на точность вычисления угла поворота перед использованием комплекса проводятся калибровочные работы, складывающиеся из двух частей: первой - калибровка «нуля» датчика и принятие постоянной поправки X к значению угловой скорости, второй - нахождение масштабных коэффициентов К1, К2 для вычисления значений угла поворота, для получения требуемой точности выполняется предварительная фильтрация оцифрованного сигнала угловой скорости по методу скользящего среднего, а для получения значения угла - численное интегрирование значения угловой скорости с учетом коэффициента К.
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| НИКИШИН, В | |||
| Б | |||
| ШОРИН, В | |||
| С | |||
| ЧИГИРЕВ, П | |||
| Г | |||
| ОЦЕНИВАНИЕ И КОМПЕНСАЦИЯ ВЛИЯНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ НА ВЫХОДНОЙ СИГНАЛ ГИРОСКОПОВ ИНЕРЦИАЛЬНОГО МИКРОМЕХАНИЧЕСКОГО МОДУЛЯ, реферат, журнал Вестник Саратовского государственного технического университета Выпуск N 4 (62) / том 4 / 2011 найдено в интернет [найдено 24.07.2014] | |||

