Изобретения относятся к области измерительной техники, в частности - к системам ориентации и навигации, а также могут быть использованы при определении и выдаче в системе координат объекта угловых координат линии визирования наблюдаемой цели, сопровождаемой поворотом головы оператора.
Известна (см., например, рекламный проспект НСЦ-Т Федеральное Государственное Унитарное Предприятие «Санкт-Петербургское опытно-конструкторское бюро «Электроавтоматика» имени П.А. Ефимова») нашлемная система целеуказания НСЦ-Т. Система состоит из нашлемного визирного устройства, двух локационных устройств и бортовой центральной вычислительной машины БЦВМ90-607. НСЦ-Т обеспечивает в условиях непосредственной видимости цели выдачу в самолетной систем координат информации о положении ЛВЦ в зоне, ограниченной конусом с плоским углом при вершине 60°, ограниченной по углу места до минус 15°. Предусмотрены ручная и автоматическая регулировка яркости коллимированных изображений прицельной и сигнальной марок, формируемых в поле зрения правого глаза оператора. Информационный обмен с ЦВМ комплекса осуществляется по двум каналам последовательного кода (по одному каналу приема и одному каналу передачи информации), в соответствии с ГОСТ 18977-79 и РТМ 1495-75 (интерфейс Arinc-429). Конструкция НСЦ-Т позволяет обеспечить в эксплуатации требуемые точности без котировочных работ.
Недостатком системы является ограниченность диапазона углов целеуказания и значительные погрешности по каждой координате при углах более 45°. Система также обладает невысокой скоростью выдачи данных и большими значениями габаритно-массовых характеристик.
Данные недостатки были частично исправлены в известной нашлемной системе целеуказания и индикации HMS/D Top Owl (фирмы THALES). В состав системы входит система позиционирования, состоящая из антенны и приемника, базовый шлем с соединителем, блок реперных устройств, пульт управления, электроблок, дисплейный модуль, модуль усиления изображения, модуль связи и защитный козырек. Система работает с шинами данных летательных аппаратов (ЛА) по интерфейсам MIL-STD-1553 Databus и Arinc-429. Система отображает на дисплее пространственное положение (тангаж, крен и рыскание), воздушную скорость ЛА, высоту полета ЛА, вертикальную скорость ЛА, курс ЛА и высоту по радиовысотомеру. Позиционирование осуществляется с помощью антенны, улавливающей изменение электромагнитного поля кабины.
Недостатком этой системы является ее сложность и дороговизна. Более того, требуется крайне сложный подготовительный процесс картографирования. Любое изменение конфигурации кабины влечет за собой необходимость проведения нового картографирования кабины в виду изменения магнитных характеристик кабины. Также не допускается расположение в пределах указанной зоны металлических, электропроводящих или магнитопроводящих материалов. Для картографирования используется специальное оборудование, в т.ч. робот и стойка управления приводами. В процессе картографирования участвуют и заказчик и поставщик оборудования, результаты готовы лишь через длительное время. Также предъявляются многочисленные требования к экранированию и заземлению системы.
Известны способ и следящая система для определения положения и ориентации подвижного объекта в трехмерной рабочей зоне ограниченных размеров, включающий создание в рабочей зоне магнитного поля, получение эталонных значений его компонент путем предварительного магнитного картографирования рабочей зоны, регистрацию текущих компонент магнитного поля, определение величины магнитного поля Земли и вычисление координат объекта, отличающийся тем, что указанное магнитное поле в рабочей зоне создают постоянным и несимметричным относительно выбранных осей координат в пределах рабочей зоны, регистрацию текущих компонент магнитного поля осуществляют одновременно посредством по меньшей мере шести однокомпонентных подвижных датчиков, размещенных на объекте, при этом величину создаваемого магнитного поля динамически регулируют в зависимости от перемещений объекта, достигая поддержания усредненного по всем датчикам значения магнитного поля на заданном уровне, магнитное поле Земли определяют постоянно и учитывают его при определении координат объекта путем включения дополнительного алгебраического уравнения в систему уравнений для подвижных датчиков, решаемую относительно трех линейных и трех угловых координат объекта, кроме того, направление создаваемого в рабочей зоне магнитного поля периодически переключают на обратное, вычисляют полуразности измеренных значений до и после переключения для каждого датчика и направления, по которым вычисляют координаты объекта, а полусуммы измеренных значений до и после переключения для каждого датчика и направления используют для контроля правильности картографирования и определения магнитного поля Земли (патент России N 2197013, МПК G05D 1/00, 09.11.2000).
Недостатком данной системы является ее сложность и трудоемкость картографирования, необходимость экранирования и заземления системы.
Известна система целеуказания, содержащая вычислительное устройство, соединенное со средством оптического сканирования, выполненном в виде видеокамеры, объектив которой направлен в лицо летчика, и прицельный маркер с меткой в виде перекрестия, расположенный со стороны лица летчика на уровне его глаз, отличающаяся тем, что вычислительное устройство состоит из соединенного своими входами с выходами видеокамеры многоканального блока приема и предварительной обработки информации, соединенного своим выходом с входом блока распознавания и деления образов, на выходах которого установлены блоки индексации образов, своими выходами соединенные с входами блока определения координат шлема и блока определения координат лица летчика, блок определения координат шлема выходом соединен с входом блока определения координат метки на прицельном маркере, а блок определения координат лица летчика - с блоком определения координат центра зрачков летчика, блоки определения координат метки на прицельном маркере и определения координат центра зрачков летчика выходами соединены с входами блока распределения информации, который своим выходом соединен с входом блока формирования линии визирования, а он своим выходом соединен с входом блока формирования линии прицеливания и выдачи команд, блок формирования линии прицеливания и выдачи команд выходами соединен с входами системы управления авиационного оружия, при этом блоки индексации образов соединены с блоком распределения информации (патент России N 2294513, МПК F41G 3/22, 30.06.2005).
Недостатком данной системы является ее дороговизна и низкая надежность из-за сложности подсистемы распознавания образов.
Известна нашлемная система целеуказания, прицеливания и индикации, содержащая устройство отображения видеоинформации, коллиматор, узел вывода изображения видеоинформации в поле зрения глаза летчика, корпус с реперными излучателями, размещенный на шлеме, при этом шлем снабжен щитком-фильтром, установленным с возможностью перемещения, оптико-локационные блоки, оптически сопряженные с реперными излучателями, и электронный блок с вычислительным устройством, она снабжена дополнительным корпусом, в котором размещены устройство отображения видеоинформации, выполненное в виде микродисплея, и коллиматор, а узел вывода изображения видеоинформации жестко соединен с дополнительным корпусом, при этом дополнительный корпус установлен с возможностью поворота и фиксации относительно корпуса с реперными излучателями и сопряжения его профильной поверхности с кромкой щитка-фильтра (патент России N 2321813, МПК F41G 3/22, B64D 7/00, 28.03.2007).
Недостатком данной системы является усложнение конструкции и габаритов шлема, что снижает надежность системы.
Известны способ и нашлемная система для определения линейных и угловых координат шлема оператора в кабине летательного аппарата по координатам размещенных на шлеме элементов реперных точек, в которых на шлеме оператора в реперных точках дополнительно размещают не менее трех нашлемных ультразвуковых приемников, а в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной системе координат кабины - не менее трех ультразвуковых излучателей, при этом в непосредственной близости от шлема оператора в точке с известными расстояниями до каждого ультразвукового излучателя размещают, по крайней мере, один ультразвуковой приемник корректирующего канала, осуществляют излучение и прием импульсных ультразвуковых сигналов, измеряют время задержки сигналов от каждого ультразвукового излучателя до каждого нашлемного ультразвукового приемника и время задержки сигналов от каждого ультразвукового излучателя до ультразвукового приемника корректирующего канала и с помощью вычислительной машины рассчитывают расстояния от каждого нашлемного ультразвукового приемника до каждого ультразвукового излучателя, по которым определяют линейные и угловые координаты шлема оператора (патент России N 2357184, МПК F41G 3/22, 13.08.2007).
Недостатком данной системы, принятой в качестве прототипа, является невысокая точность измерения, низкое быстродействие из-за сложности взаимодействия большого количества излучателей и приемников, громоздкость оборудования, сложность настройки и калибровки системы.
Техническим результатом изобретения является повышение точности измерения и увеличение быстродействия прибора при обеспечении определения и выдачи угловых координат линии визирования наблюдаемой цели, сопровождаемой поворотом головы оператора. Обеспечивается простая установка системы в кабину, быстрое включение и выставка (настройка и калибровка) системы. Повышается безопасность полета и удобство пилотирования. Преимущественно устройство предполагается использовать в вертолетах.
Указанный технический результат достигается тем, что в способе определения ориентации шлема пилота, включающем определение с помощью вычислительной машины линейных и угловых координат шлема, посредством беспроводной связи чувствительных преобразователей, установленных на шлеме и в кабине, в качестве чувствительного преобразователя на шлеме используют микромеханический бесплатформенный инерциальный блок (МБИБ), содержащий наномеханические гироскопы (НМГ) с автоэлекронной эмиссией, сначала осуществляют начальную привязку системы координат микромеханического бесплатформенного инерциального блока к системе координат летательного аппарата (ЛА), для чего определяют углы поворота координатных осей системы координат МБИБ до их совпадения с осями системы координат ЛА и фиксируют значения этих углов в памяти вычислительной машины, а в процессе определения линейных и угловых координат шлема вводят сигнал МБИБ в вычислительную машину, вычисляют средние значения угловых скоростей, абсолютное и относительное пространственное положение шлема и, при необходимости, корректируют его в соответствии с заданными алгоритмами коррекции сигнала.
Кроме того, обмен данными между чувствительными преобразователями осуществляют посредством радиосигнала.
Кроме того, коэффициенты коррекции сигнала, используемые в упомянутых алгоритмах коррекции определяют на стадии заводской калибровки МБИБ и НМГ.
Для устройства указанный технический результат достигается тем, что в устройстве нашлемной системы целеуказания и индикации, содержащем чувствительные преобразователи, установленные на шлеме пилота и в кабине ЛА, связанные с вычислителем, чувствительный преобразователь на шлеме пилота выполнен в виде жестко закрепленных в зоне его визирного устройства радиоинтерфейса и нашлемного МБИБ, содержащего наномеханические гироскопы (НМГ) с автоэлекронной эмиссией, а чувствительный преобразователь в кабине ЛА - в виде расположенного в блоке индикатора его лобового стекла вычислителя, представляющего собой модуль, содержащий микроконтроллер и приемо-передатчик радиоинтерфейса.
Изобретения поясняются чертежами.
На фиг.1 показана общая схема построения нашлемной системы целеуказания и индикации на основе нашлемного микромеханического бесплатформенного инерциального блока (МБИБ).
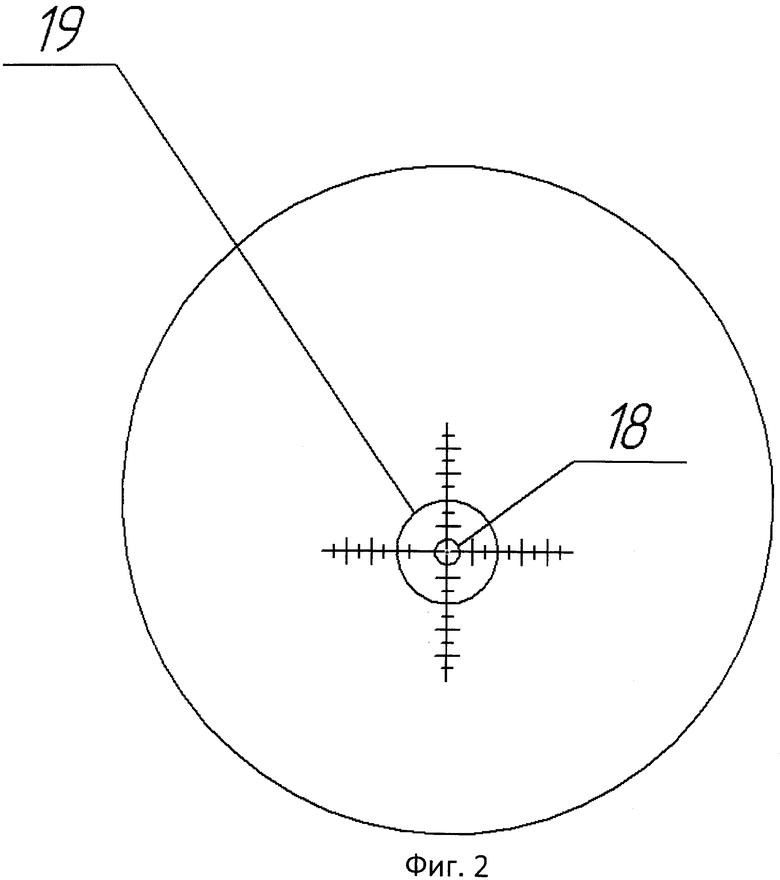
На фиг.2 представлено изображение механической сетки.
На фиг.1 приведены позиции:
1 - каска шлема;
2 - нашлемный модуль;
3 - защитный светофильтр;
4 - кожух кабины;
5 - нашлемный МБИБ на основе НМГ;
6 - источник питания;
7 - радиоинтерфейс МБИБ;
8 - нашлемное визирное устройство;
9 - визирная метка;
10 - блок индикатора лобового стекла (ИЛС);
11 - кнопка управления «начало отсчета»;
12 - кнопка управления «захват цели»;
13 - изображение механической сетки на ИЛС;
14 - панель навигационно-пилотажного комплекса (НПК) летательного аппарата;
15 - микроконтроллер НСО;
16 - приемо-передатчик радиоинтерфейса микроконтроллера НСО;
17 - изображение цели на лобовом стекле.
На передней части каски шлема 1 фиг.1 установлен нашлемный модуль (НШМ) 2, под кожухом которого размещен откидывающийся защитный фильтр 3. На верхней части НШМ установлено нашлемное визирное устройство 8 с визирной меткой 9. Нашлемный МБИБ 5 устанавливается рядом с нашлемным визирным устройством 8 на шлеме летчика 1. Рядом с нашлемным МБИБ 5 устанавливаются источник питания 6 и радиоинтерфейс 7. На верхней части кожуха кабины 14 установлен блок индикатора лобового стекла (ИЛС) 10 с кнопками управления 11 («начало отсчета») и 12 («захват цели»), а также изображение механической сетки 13 (фиг.2). Информация с нашлемного МБИБ 5 посредством радиоинтерфейса 7 и приемо-передатчика 16 поступает в микроконтроллер НСО 15, размещенный в блоке ИЛС 10.
На фиг.2 представлено изображение механической сетки. Механическая сетка отображается на индикаторе лобового стекла.
Включение нашлемной системы целеуказания и индикации (НСЦИ) проводится перед полетом, время включения системы не превышает нескольких десятков секунд. В процессе работе с НСО пилот совмещает визирную метку 9 нашлемного визирного устройства 8 с изображением механической сетки 13 на ИЛС 10 и нажимает кнопку управления 11 («начало отсчета»), удерживая в этом положении не менее 0,1 с, после чего отпускает. При совмещении визирная метка должна попасть во внутреннюю область 18 круга 19 на фиг.2. При этом информация об угловых скоростях ωxi, ωyi, ωzi от микроконтроллера МБИБ 5 поступает в микроконтроллер НСО 15 посредством радиосигнала, передаваемого от радиоинтерфейса 7 в приемо-передатчик радиоинтерфейса микроконтроллера НСО 16. На основе полученных значений, а также значений углов, передаваемых штатной курсовертикалью летательного аппарата, вычисляются средние значения начальных угловых скоростей и линейных ускорений на интервале начала отсчета (от момента нажатия кнопки до момента отжатия).
Вычисленные значения сохраняются в оперативной памяти микроконтроллера НСО 15 и используются в дальнейшем процессе работы системы. Далее пилот наводит визирное устройство 7 на цель и совмещает визирную метку 8 с изображением цели на лобовом стекле 17.
Вычисление значений угловых скоростей в МБИБ осуществляется по формуле 2.


где ωξi, °/с - угловая скорость по оси ξ={x, y, z},
Ugξi, В - значение выходного напряжения гироскопа,

Kgξ, В/°/с - значение масштабного коэффициента гироскопа.
Вычисленные значения текущих угловых скоростей передаются с помощью радиосигнала в микроконтроллер НСО, расположенный в блоке ИЛС.
Вычисление приращений углов и кажущихся скоростей выполняется по формуле 4.


где 

Т, с - такт опроса.
После того, как пилот захватил цель, он нажимает кнопку 12 «захват цели». Абсолютные углы крена, курса и тангажа γΣ, ψΣ, ϑΣ шлема вычисляются интегрированием угловых скоростей по времени в соответствии с формулой 5.

где t0 - момент времени, соответствующий началу отсчета,
t3 - момент времени, соответствующих захвату цели.
Для вычисления относительного пространственного положения шлема γшл, ψшл, ϑшл необходимо вычесть из полученных углов углы тангажа, крена и курса ЛА в соответствии с формулой 6.
γшл=γΣ-γс; ψшл=ψΣ-ψс; 
где γс, ψc, ϑс - углы крена, курса и тангажа, выдаваемые штатной курсовертикалью летательного аппарата.
В процессе вычислений может проводится коррекция значений с учетом тренда нулевого сигнала, возможно применение программных фильтров, обеспечивающих повышение точности измерений и компенсацию системных погрешностей.
Повышение точности измерения и быстродействия устройства достигается за счет использования НМГ в составе МБИБ, у которых значение дрейфа нулевого сигнала на порядок меньше, чем у гироскопов с емкостными преобразователями и увеличения частоты измерения. В начале работы осуществляют начальную привязку системы координат микромеханического бесплатформенного инерциального блока к системе координат ЛА, для чего определяют углы поворота координатных осей системы координат МБИБ до совпадения относительно системы координат ЛА и фиксируют их значения в памяти вычислительной машины. В процессе определения линейных и угловых координат шлема вводят сигнал МБИБ в вычислительную в машина и корректируют его в соответствии с разработанными алгоритмами коррекции сигнала. Коэффициенты, используемые в данных алгоритмах определяются на стадии заводской калибровки изделия. Использование радиоинтерфейса позволяет повысить безопасность полета и удобство пилотирования. Кроме того, в процессе работы используется информация штатной курсовертикали летательного аппарата.
Использование вычислителей с высокочастотным процессорным ядром и быстродействующим АЦП обеспечивает повышение общего быстродействия системы.
Таким образом, предлагаемыми изобретениями получен технический результат, заключающийся в повышении точности измерения, уменьшение массово-габаритных характеристик и увеличение быстродействия прибора при обеспечении определения и выдачи угловых координат линии визирования наблюдаемой цели, сопровождаемой поворотом головы оператора. Обеспечивается простая установка системы в кабину, быстрое включение и выставка системы. Повышается безопасность полета и удобство пилотирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ШЛЕМ КОСМОНАВТА ВИЗУАЛЬНОГО НАБЛЮДЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2009 |
|
RU2410731C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| НАШЛЕМНАЯ СИСТЕМА ОПЕРАТИВНОГО ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2010 |
|
RU2446421C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2208758C2 |
| СПОСОБ ВЫСОКОТОЧНОГО ЦЕЛЕУКАЗАНИЯ | 1999 |
|
RU2165062C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
Изобретения относятся к области измерительной техники, в частности - к системам ориентации и навигации. Чувствительные преобразователи установлены на шлеме пилота и в кабине ЛА, связанные с вычислителем. Чувствительный преобразователь на шлеме пилота выполнен в виде жестко закрепленных в зоне его визирного устройства радиоинтерфейса и нашлемного МБИБ, содержащего наномеханические гироскопы (НМГ) с автоэлекронной эмиссией. Чувствительный преобразователь в кабине ЛА выполнен в виде расположенного в блоке индикатора его лобового стекла вычислителя, представляющего собой модуль, содержащий микроконтроллер и приемопередатчик радиоинтерфейса. Для осуществления начальной привязки системы координат микромеханического бесплатформенного инерциального блока к системе координат летательного аппарата (ЛА) определяют углы поворота координатных осей системы координат МБИБ до их совпадения с осями системы координат ЛА и фиксируют значения этих углов в памяти вычислительной машины. Вычисляют средние значения угловых скоростей, абсолютное и относительное пространственное положение шлема. Обмен данными между чувствительными преобразователями осуществляют посредством радиосигнала. Техническим результатом изобретения является повышение точности измерения, безопасности полета и удобства пилотирования. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ определения ориентации шлема пилота, включающий определение с помощью вычислительной машины линейных и угловых координат шлема, посредством беспроводной связи чувствительных преобразователей, установленных на шлеме и в кабине, отличающийся тем, что в качестве чувствительного преобразователя на шлеме используют микромеханический бесплатформенный инерциальный блок (МБИБ), содержащий наномеханические гироскопы (НМГ) с автоэлекронной эмиссией, сначала осуществляют начальную привязку системы координат микромеханического бесплатформенного инерциального блока к системе координат летательного аппарата (ЛА), для чего определяют углы поворота координатных осей системы координат МБИБ до их совпадения с осями системы координат ЛА и фиксируют значения этих углов в памяти вычислительной машины, а в процессе определения линейных и угловых координат шлема вводят сигнал МБИБ в вычислительную машину, вычисляют средние значения угловых скоростей, абсолютное и относительное пространственное положение шлема и, при необходимости, корректируют его в соответствии с заданными алгоритмами коррекции сигнала.
2. Способ определения ориентации шлема пилота по п.1, отличающийся тем, что обмен данными между чувствительными преобразователями осуществляют посредством радиосигнала.
3. Способ определения ориентации шлема пилота по п.1, отличающийся тем, что коэффициенты коррекции сигнала, используемые в упомянутых алгоритмах коррекции, определяют на стадии заводской калибровки МБИБ и НМГ.
4. Устройство нашлемной системы целеуказания и индикации, содержащее чувствительные преобразователи, установленные на шлеме пилота и в кабине ЛА, связанные с вычислителем, отличающееся тем, что чувствительный преобразователь на шлеме пилота выполнен в виде жестко закрепленных в зоне его визирного устройства радиоинтерфейса и нашлемного МБИБ, содержащего наномеханические гироскопы (НМГ) с автоэлекронной эмиссией, а чувствительный преобразователь в кабине ЛА - в виде расположенного в блоке индикатора его лобового стекла вычислителя, представляющего собой модуль, содержащий микроконтроллер и приемопередатчик радиоинтерфейса.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| US 2006181483 A1, 16.08.2006 | |||
| US 4209255 A, 24.06.1980 | |||
| US 4034401 A, 05.07.1977 | |||
| JP 2001034408 A, 09.02.2001 | |||

