Изобретение относится к сельскому хозяйству, в частности к животноводству, и может быть использовано для загона животных в скотовоз.
Известны устройства загона животных в скотовоз с помощью электрического тока (электростек), механического воздействия на животное (палка-погонялка, кнут, подручный инвентарь) и звукового давления (хлопушка, ременный бич) [Лапин А.П. Охрана труда в сельскохозяйственном производстве. Учебное пособие. Орел, ВНИИОТ. 2001. С. 188; Правила по охране трудов в животноводстве. ПОТ РО 006 - 2003. ФГНУ ВНИИОТ МСХ РФ, Орел, 2003. С. 30; Типовые инструкции по охране труда при выполнении работ в животноводстве. Госагропром СССР, М.: 1989. С. 125].
К недостаткам указанных устройств для подгона животных относятся неудобство использования, возможность травмирования работника животным.
Наиболее близким по технической сущности к предлагаемому устройству является устройство загона животного в передвижное средство путем механического воздействия (http://meatinfo.ru/info/show?id=326).
Недостатками указанного устройства являются опасность травмирования работника, большая трудоемкость, неудобство в использовании.
Задачей изобретения является повышение безопасности и удобства обслуживания, снижение трудоемкости при подгоне животных, установка в скотовозе манипулятора, двух помостов и двух вытесняющих шторок, позволяющих автоматизировать процесс погрузки животных в скотовоз.
В результате использования предлагаемого изобретения повышается безопасность и удобство обслуживания, снижается трудоемкость при подгоне животных.
Вышеуказанный технический результат достигается тем, что в предлагаемый электророботизированный скотовоз, включающий передвижное устройство, огражденную площадку для накопления животных, ворота для захода и выхода животных, помост, дополнительно введены станки с устройствами фиксации животных, метки идентификационных номеров на ошейнике животных, система идентификации номеров с выдвижной антенной, манипулятор, два помоста, устройство синхронизации станка и помоста, передвижные шторки вытеснения животных, причем микроконтроллер связан через сеть Wi-Fi c центральным управляющим пунктом, системой диагностики механизмов скотовоза, маршрутизатором, системой управления движением скотовоза, включающим электродвигатель, регулятор скорости, срабатываемый при чтении меток, которые определяются системой распознавания номеров, связанной с манипулятором через синхронизатор, антенну и помост с лекалом, манипулятор также связан с помостом и воротами, также манипулятор связан с вытесняющими шторками через ворота и помост, а вытесняющие шторки - с пунктом приема животных.
Предлагаемый электророботизированный скотовоз содержит передвижное устройство с площадкой для накопления животных, выдвижной помост, манипулятор, систему открытия и закрытия ворот, метки с электронными номерами на ошейнике животных, систему идентификации номеров, антенну, систему синхронизации станка с положением помоста, вытесняющие шторки для вытеснения животных на площадку приема в зоне выгрузки.
Скотовоз создается на базе железнодорожного вагона с тяговыми электродвигателями. На скотовозе размещаются разрабатываемый манипулятор, который будет вытеснять скот из стойла с устройствами фиксации, выдвижной помост, антенны для идентификации электронных номеров с меток, закрепленных на ошейнике, ворота, система синхронизации станка с помостом, вытесняющие шторки. Применен гидравлический привод для манипулятора скотовоза и выдвижного помоста. Микроконтроллер используется для управления роботом, отдельными его элементами и связи с центральным управляющим центром.
Сущность предлагаемого изобретения поясняется фиг. 1 и 2.
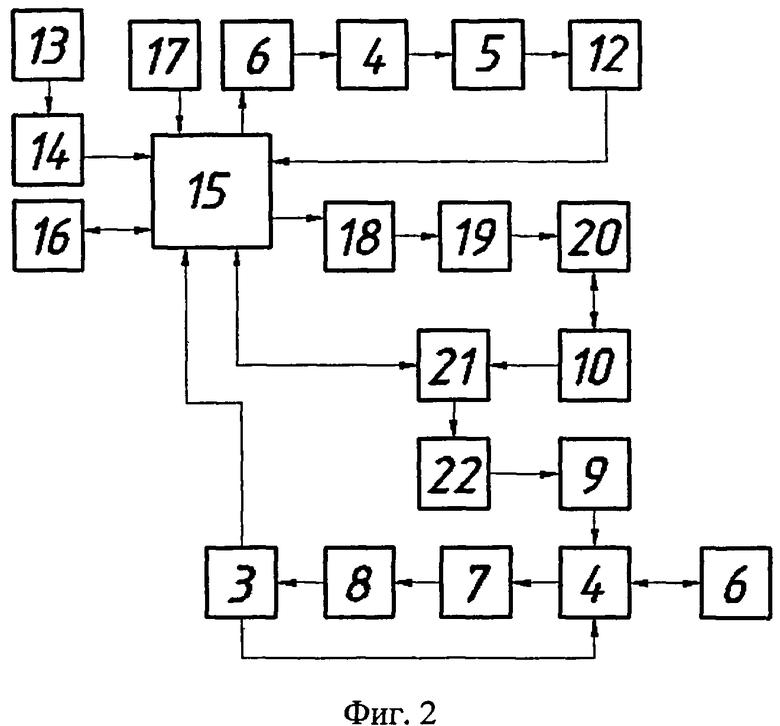
На фиг. 1 представлена общая схема электророботизированного скотовоза.
На фиг. 2 представлена система управления автоматизированным устройством погрузки и выгрузки животных в скотовоз.
Электророботизированный скотовоз содержит передвижное устройство 1, площадку накопления животных 2, манипулятор 3, два помоста 4, вытесняющие шторки 5, ворота 6, лекало 7, устройство фиксации животных 8, выдвижную антенну 9, метки идентификационных номеров на ошейниках животных 10, станки 11, площадку приема животных 12, центральный управляющий пункт 13, сеть Wi-Fi 14, микроконтроллер 15, систему диагностики 16, маршрутизатор 17, систему управления движением скотовоза 18, электродвигатели 19, регулятор скорости 20, систему распознавания номеров 21, устройство синхронизации 22.
Микроконтроллер 15 связан с передвижным устройством 1, включающим в себя площадку накопления животных 2. Также микроконтроллер связан с центральным управляющим пунктом 13 через сеть Wi-Fil4, системой диагностики 16, маршрутизатором 17 и системой управления движением скотовоза 18, включающей в себя электродвигатели 19, регулятор скорости 20; система управления движением скотовозом 18 соединена через метки 10 с системой распознавания номеров 21, которая соединена с устройством синхронизации 22, которое связано со станком 11. Устройство синхронизации 22 связано с выдвижной антенной 9, воротами 6, манипулятором 3 и помостами 4, которые связаны с устройствами фиксации 8 через лекало 7. Манипулятор 15 также связан с вытесняющими шторками 5 через ворота 6 и помосты 4, а вытесняющие шторки 5 связаны с площадкой приема животных 12.
Работает электророботизированный скотовоз следующим образом: из центрального управляющего пункта 13 через сеть Wi-Fi 14 поступает команда с номерами животных и ферм, содержащих заданные животные, на микроконтроллер 15, после чего система диагностики 16 проводит детальную проверку механизмов и устройств работоспособности скотовоза, а маршрутизатор 17 строит путь следования вагона. Система диагностики 16 сообщает микроконтроллеру 15 о возможности исполнения команды при полной работоспособности системы. Вагон начинает движение при получении сигнала с микроконтроллера 15 на систему управления движением скотовоза18, где движение начинается с пуска электродвигателей 19 и регулировкой скорости 20, срабатываемой при чтении меток 10. Также метки 10 устанавливаются на ошейниках животных и при определении их системой распознавания номеров 21 заданных номеров происходит остановка вагона и его синхронизация 22 со станком фермы 11 с закрепленным в ней животным. Приводится в действие уборка антенны 9, выдвижение помоста 4, который механически снимает устройство фиксации животных 8 в станке лекалом 7, включение в работу манипулятора 3 и вытеснение животного в скотовоз. После вытеснения животного в скотовоз убирается помост 4 и восстанавливается устройство фиксации животных 8, закрываются ворота 6. По прибытию вагона в зону выгрузки открываются крайние ворота 6, выдвигается крайний помост 4 и животные вытесняются шторками 5 на площадку приема животных 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ЛИНИЯ ЭФФЕКТИВНОГО ВЫЯВЛЕНИЯ ОХОТЫ У ИДЕНТИФИЦИРОВАННЫХ МОЛОЧНЫХ (ДОЙНЫХ) КОРОВ ПРИ БЕСПРИВЯЗНОМ СОДЕРЖАНИИ | 2010 |
|
RU2463996C2 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| СПОСОБ И УСТРОЙСТВО ИДЕНТИФИКАЦИИ КОРОВ | 2009 |
|
RU2423825C1 |
| УСТАНОВКА ДЛЯ ПРОВЕДЕНИЯ ЗООВЕТЕРИНАРНЫХ МЕРОПРИЯТИЙ | 2015 |
|
RU2581237C1 |
| СПОСОБ И УСТРОЙСТВО УСОВЕРШЕНСТВОВАННОЙ УСКОРЕННОЙ ФИКСАЦИИ ИДЕНТИФИЦИРОВАННЫХ КОРОВ | 2012 |
|
RU2523501C2 |
| ЛЕЧЕБНО-ПРОФИЛАКТИЧЕСКАЯ ПЕРЕДВИЖНАЯ СИСТЕМА С ДОИЛЬНЫМ АППАРАТОМ | 2011 |
|
RU2501208C2 |
| Устройство для разделения стада животных на группы по состоянию здоровья | 1991 |
|
SU1813383A1 |
| Механизированная установка для бесконтактной тепловизионной видеоцифровой диагностики заболеваний животных | 2017 |
|
RU2668674C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ЛЮДЕЙ ПОД ЗАВАЛАМИ И ПОИСКА ВЗРЫВЧАТЫХ И НАРКОТИЧЕСКИХ ВЕЩЕСТВ | 2010 |
|
RU2426141C1 |
| СИСТЕМА КОНТРОЛЯ ФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ЖИВОТНЫХ | 2019 |
|
RU2768739C1 |
Изобретение относится к животноводству. Электророботизированный скотовоз включает передвижное устройство 1, огражденную площадку для накопления животных 2, ворота 6 для захода и выхода животных. Дополнительно введены станки 11 с устройствами фиксации животных, метки идентификационных номеров на ошейнике животных 10, система идентификации номеров с выдвижной антенной 9, манипулятор, два помоста 4, устройство синхронизации станка и помоста, передвижные шторки 5 вытеснения животных. Причем микроконтроллер связан через сеть Wi-Fi c центральным управляющим пунктом, системой диагностики механизмов скотовоза, маршрутизатором, системой управления движением скотовоза, включающей электродвигатель, регулятор скорости, срабатывающий при чтении меток 10, которые определяются системой идентификации номеров, связанной с манипулятором через синхронизатор, антенну 9, помост 4 с лекалом 7. Манипулятор также связан с помостом 4 и воротами 6, также манипулятор связан с вытесняющими шторками 5 через ворота 6 и помост 4, а вытесняющие шторки 5 - с пунктом приема животных. В результате использования предлагаемого изобретения повышается безопасность и удобство обслуживания, снижается трудоемкость при подгоне животных. 2 ил.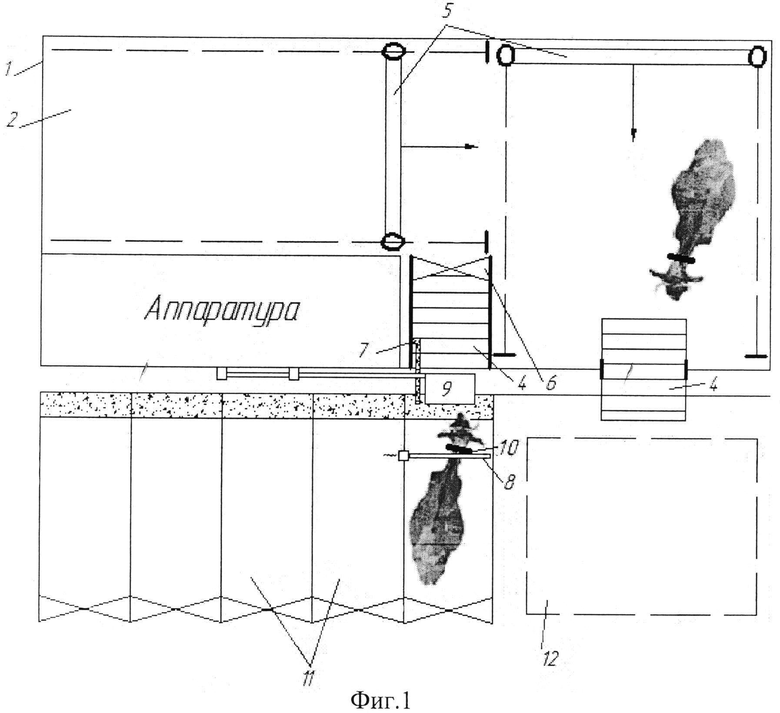
Электророботизированный скотовоз, включающий передвижное устройство, огражденную площадку для накопления животных, ворота для захода и выхода животных, помост, отличающийся тем, что дополнительно введены станки с устройствами фиксации животных, метки идентификационных номеров на ошейнике животных, система идентификации номеров с выдвижной антенной, манипулятор, два помоста, устройство синхронизации станка и помоста, передвижные шторки вытеснения животных, причем микроконтроллер связан через сеть Wi-Fi c центральным управляющим пунктом, системой диагностики механизмов скотовоза, маршрутизатором, системой управления движением скотовоза, включающей электродвигатель, регулятор скорости, срабатывающий при чтении меток, которые определяются системой идентификации номеров, связанной с манипулятором через синхронизатор, антенну и помост с лекалом, манипулятор также связан с помостом и воротами, также манипулятор связан с вытесняющими шторками через ворота и помост, а вытесняющие шторки - с пунктом приема животных.
| US 4498418 A, 12.02.1985 | |||
| Устройство для погрузки и транспортировки животных | 1980 |
|
SU1021638A1 |
| FR 2920715 A1, 13.03.2009. | |||

