Изобретение относится к области сельского хозяйства, в частности к раздаче кормов на молочных фермах с привязным содержанием коров.
Цель изобретения - повышение производительности, надежности и плавности индивидуальной раздачи кормов.
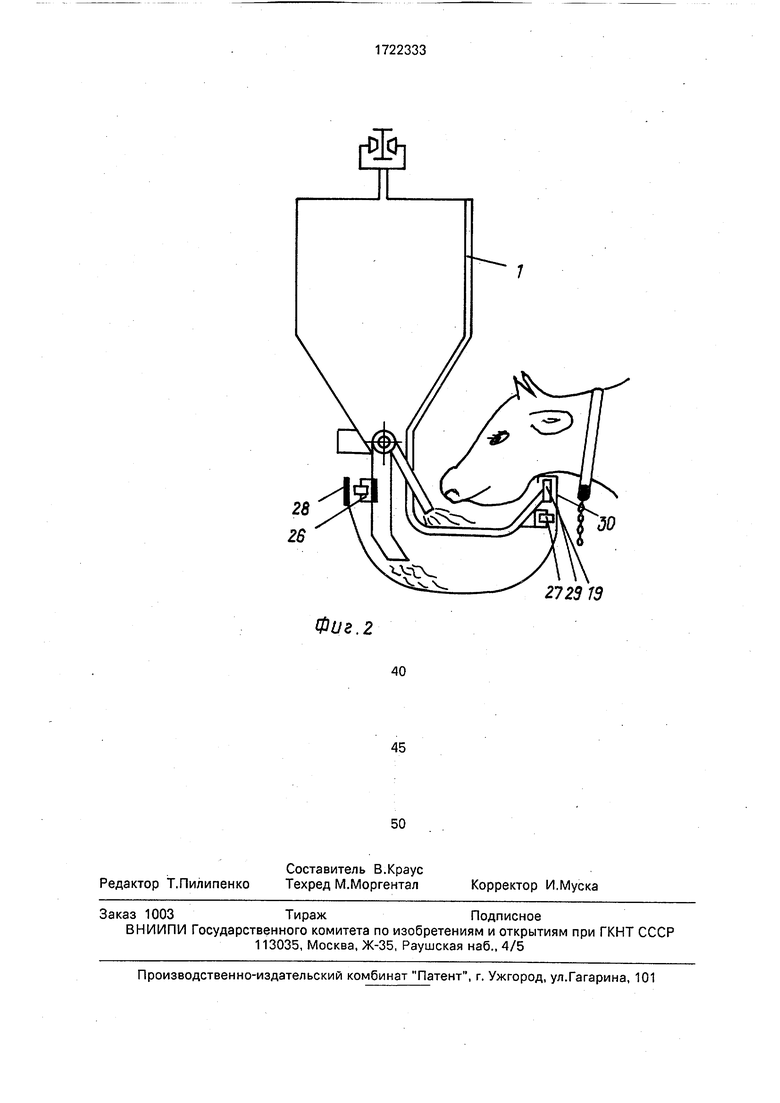
На фиг. 1 представлена блок-схема кормораздатчика; на фиг. 2- кормушка, общий вид.
Устройство имеет бункер 1 с запасом корма, из которого корм по команде датчика уровня 2, передаваемой в бункер-дозаторЗ, подается через кабельную шторку 4 на управляемый электропривод 5 подачи корма. В верхней части бункера-дозатора.3 размещен названный датчикуровня 2. Команда на
загрузку подается в том случае, если бункер- дозатор 3 находится в крайнем положении, фиксируемом датчиком конечного положения бункера-дозатора 3, от него поступает сигнал-разрешение на включение электропривода 5 и подачу корма в бункер-дозатор 3. Подача корма осуществляется до тех пор, пока бункер-дозатор 3 заполнится кормом и сработает датчик верхнего уровня 2, который отключит электропривод 5.
Бункер с кормом устанавливается в специальном помещении и корм из него шнеком (или другого вида транспортером) 8 подается в бункер-дозатор 3. Кабельная шторка 4 через поводок 7 соединена с тележкой бункера и движется с ней синхронно.
VJ
ю ю со
00 CJ
Бункер-дозатор 3 крепится к каретке 9, присоединенной к тележке 10, которая установлена на подвешенный к потолку монорельс 11. Каретка 9 с тележкой 10 через поводок 12 присоединена к цепной передаче 13.
Передача 13 выполняется цепной без проскальзывания и связана механическими поводками 12 с тележкой бункера-дозатора 3 и шторкой 4, через которую проходят электрические провода для информационных и силовых сигналов. Цепная передача соединена со стационарным регулируемым электроприводом 14, выход которого соединен с датчиком оборотов 15, выход последнего соединен с входом блока программного управления 16, другой вход которого соединен с микроконтроллером 17, а выход - с регулируемым электроприводом 14.
Выход антенны 19 соединен с входом приемопередатчика 18, который своим выходом через кабельную шторку 4 соединен с микроконтроллером 17.
Микроконтроллер 17 соединен каналом связи с ЭВМ и первым выходом - с входом электропривода дозатора 20, который механически соединен с бункером-дозатором 3, последний,в свою очередь, первым кормоп- роводом 21 - с кормушкой-приманкой 22 и вторым кормопроводом 23 с кормушками 24i....24n станков с животными, на ошейниках у которых закреплены датчики номеров 25i....25n, которые радиосигналом связаны с антенной 19. Раздатчик перемещается катками 26, 27 по направлению 28, 29 с козырьком 30.
Кормораздатчик работает следующим образом.
В микроконтроллер 17 вводят задание на кормление каждого животного: номер животного, час суток, в который должен быть выдан корм, количество корма - суточная и дозы по массам суток. В определенный час суток микроконтроллер 17 подает команду блоку программногоуправления 16 на начало движения бункера-дозатора 3 вдоль кормушек 24i....24n. По количеству импульсов, заранее определенных для места расположения каждой кормушки 24, программный блок 16 определяет места остановки бункера-дозатора 3 около каждой кормушки 24 и, следовательно, каждого животного. Первая остановка бункера-дозатора происходит около кормушки 24. Включается система распознавания номеров животных. Животное тянется за кормом в кормушки-приманки 22, датчик номера 25 попадает в зону действия антенны 18, происходит распознавание номера животного и запись в микроконтроллер 17 номера животного и номера кормушки 24 (стойла). Из памяти контроллера 17 извлекается задание - доза корма для данного животного и она выдается бункером-дозатором 3 в кормушку 24. Бункер-дозатор 3 приводом 14 плавно (по заданной программе пуска) двигается с места, отсчитывается новое (заданное) число импульсов, останавливается у второй кормушки 27, и цикл выдачи корма
0 повторяется. В такой последовательности осуществляется выдача корма в каждую кормушку 24.
Надежность идентификации достигается за счет достижения четкого расположе5 ния животного у кормушки 24 в момент поедания корма из кормушки-приманки 22, быстродействие и плавность за счет регулируемого электропривода 14, осуществляющего плавный пуск, торможение и
0 ускоренное движение на участках, где отсутствует необходимость идентификации и раздачи корма.
Быстродействие движения кормораздатчика достигается за счет формы раздат5 чика. Раздатчик свободно перемещается вдоль кормушек 24 при опущенных в кормушку головах животных, что стало возможным в результате применения формы рамы 1 раздатчика соответствующей профилю го0 ловы животного и округлых углов, исключающий какое-либо зацепление голов животных. Движение кормораздатчика направляется катками 26 и 27, которые катятся по направляющим 28 и 29.
5 Формула изобретения
1. Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании, включающий передвижной бункер-дозатор, установлен0 ный на монорельсовой тележке с электроприводом, дозатор с исполнительным механизмом, блок идентификации номера животного в виде передатчика, излучателя и приемника, блок управления кормлением,
5 датчик положения тележки, бункер с кормом для передачи корма в бункер-дозатор, отличающийся тем, что, с целью повышения производительности и надежности работы при раздаче корма, он снабжен
0 датчиком оборотов, блоком программногоуправления, микроконтроллером и кормушкой- приманкой, а электропривод выполнен регулируемым и кинематически связан с тележкой, бункер-дозатор соединен с карет5 кой, прикрепленной к тележке, при этом выходной вал регулируемого электропривода посредством датчика оборотов соединен с первым входом блока программного управления, а выход приемопередатчика сое- динен с входом микроконтроллера, причем
первый выход микроконтроллера соединен с входом электропривода дозатора, а второй выход микроконтроллера соединен с вторым входом блока программного управления, выход которого связан с входом регулируемого электропривода, кроме того, антенна приемопередатчика расположена на передней кромке кормушки-приманки, сообщенной кормопроводом с бункером- дозатором.
2. Кормораздатчик по п. 1, о т л и ч а ю- щ и и с я тем, что бункер-дозатор снабжен датчиком уровня корма, который связан с первым входом управляемого электропривода подачи корма в бункер-дозатор и датчиком конечного положения бункера-дозатора, который подключен к второму входу управляемого электропривода подачи корма в бункер-дозатор.
3.Кормораздатчик по п. отличающийся тем, что, кинематическая связь
выполнена цепной и помещена в направляющие, установленные по всей длине фронта кормления, при этом нижняя часть направляющих выполнена с прорезью, через которую пропущен поводок, соединенный с
кареткой тележки, на которой подвешен бункер-дозатор.
4.Кормораздатчик по п. 1, о т л и ч а ю- щ и и с я тем, что, рама кормораздатчика выполнена в виде рамы для огибания профиля головы животного, по краям которой установлены опорные катки, опирающиеся на направляющие, установленные вдоль бортов кормушек.

| название | год | авторы | номер документа |
|---|---|---|---|
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| Устройство для порционного кормления животных | 1986 |
|
SU1375204A1 |
| Кормораздатчик | 1987 |
|
SU1516072A1 |
| Линия для раздачи кормов в рыбо-ВОдНыХ САдКАХ | 1979 |
|
SU843895A2 |
| УСТРОЙСТВО ДЛЯ РАЗДАЧИ КОРМА | 1991 |
|
RU2009639C1 |
| РАЗДАТЧИК КОРМОВ | 1998 |
|
RU2129779C1 |
| УСТАНОВКА ДЛЯ МЕХАНИЗАЦИИ ПРОЦЕССОВ В КОРОВНИКЕ | 2007 |
|
RU2339281C1 |
| ПОСТРОЙКА ДЛЯ СОДЕРЖАНИЯ ЖИВОТНЫХ | 1992 |
|
RU2088078C1 |
| Кормораздатчик | 1988 |
|
SU1576085A1 |
| Мобильный раздатчик влажных кормов | 1984 |
|
SU1179959A2 |

Изобретение относится к области сельского хозяйства, в частности к раздаче кормов на молочных фермах с привязным содержанием коррв. Цель изобретения - повышение производительности и надежности работы при раздаче корма. В кормораздатчике-автомате применен стационарный регулируемый электропривод, соединенный через цепную передачу с тележкой с одной стороны и с датчиком оборотов с другой стороны. Антенна с приемопередатчиком установлена на уровне кормушек и конструктивно состыкована с дополнительной кормушкой-приманкой. Блок управления состоит из микроконтроллера и блока программного управления регулируемого электропривода. Микроконтроллер своим входом связан с приемопередатчиком, а выходами - с электроприводом дозатора и блоком программного управления. Датчик конечного положения срабатывает и включает управ- ляемый электропривод подачи корма в бункер с кормом. Кормораздатчик перемещается вдоль кормушки и последовательно останавливается у каждой, осуществляя выдачу корма. 3 з.п. ф-лы, 2 ил. w Ё
Механические соединения
Электрические соединения Транспартеры и кормопрододы
ТЩ
Фиг.2
И
2725 ГЗ
| Устройство для порционного кормления животных | 1986 |
|
SU1375204A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
