Изобретение относится к полигонным испытаниям и может быть использовано для определения условий подхода снаряда к мишени.
Известен способ для измерения скорости метаемого тела, заключающийся в измерение скорости метаемого тела на основе измерения временного интервала между моментами срабатывания двух пространственно разнесенных датчиков, изготовление датчиков в виде двух перпендикулярных линеек фотоприемников, определение комбинации сработавших элементов фотоприемников, определение координат пролета метаемого тела, на основе фиксации комбинации сработавших элементов фотоприемников, выдачи информации о скорости метаемого тела и координат его пролета относительно первого и второго датчиков (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Известно устройство для измерения скорости метаемого тела, которое содержит два разнесенных датчика, первый и второй измерительные приборы, связанный с выходами датчиков, первый, второй, третий, четвертый элемент ИЛИ, первый и второй блок логики, а каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элемента ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элемента ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены с входами триггеров, выходы которых соединены с блоком индикации (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Недостатком данных способа и устройства является невозможность определения условий подхода снаряда к мишени.
Технической задачей изобретения является повышения информативности за счет определения условий подхода снаряда к мишени.
Решение технической задачи достигается тем, что в способе определения условий подхода снаряда к мишени, заключающемся в измерение скорости снаряда, в изготовление датчиков в виде линеек фотоприемников размещенных в вертикальной и горизонтальной плоскости, фиксации сработавших элементов фотоприемников первого и второго датчиков в момент пролета снаряда, определение координат движения метаемого тела, выдачи информации о скорости метаемого тела и координат его пролета относительно первого и второго датчиков, дополнительно размещают второй датчик относительно первого датчика на расстоянии - m1, размещают мишень относительно первого датчика на расстоянии - m2, фиксируют изменения координат снаряда относительно первого и второго датчиков и на этой основе определяют координаты попадания снаряда в мишень в виде выражений:  ,
,  , где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков,
, где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков,  - коэффициент определяющий условия размещения второго датчика и мишени относительно первого датчика, определяют углы подхода снаряда к мишени в виде выражений:
- коэффициент определяющий условия размещения второго датчика и мишени относительно первого датчика, определяют углы подхода снаряда к мишени в виде выражений:  ,
,  , где X, Y - координаты вектора движения снаряда.
, где X, Y - координаты вектора движения снаряда.
Решение технической задачи достигается тем, что в устройство определения условий подхода снаряда к мишени, содержащем два разнесенных датчика первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены со входами триггеров, выходы которых соединены с блоком индикации, в котором дополнительно введены вычислитель условий подхода снаряда к мишени, индикатор углов подхода снаряда к мишени и индикатор координат попадания снарядов в мишень, причем выходы первого и второго блоков логики, соединены соответственно с первой и второй, группой входов вычислителя условий подхода снаряда к мишени, первый и второй выходы которого соединены соответственно с входами индикатора углов подхода снаряда и индикатора координат попадания снарядов в мишень.
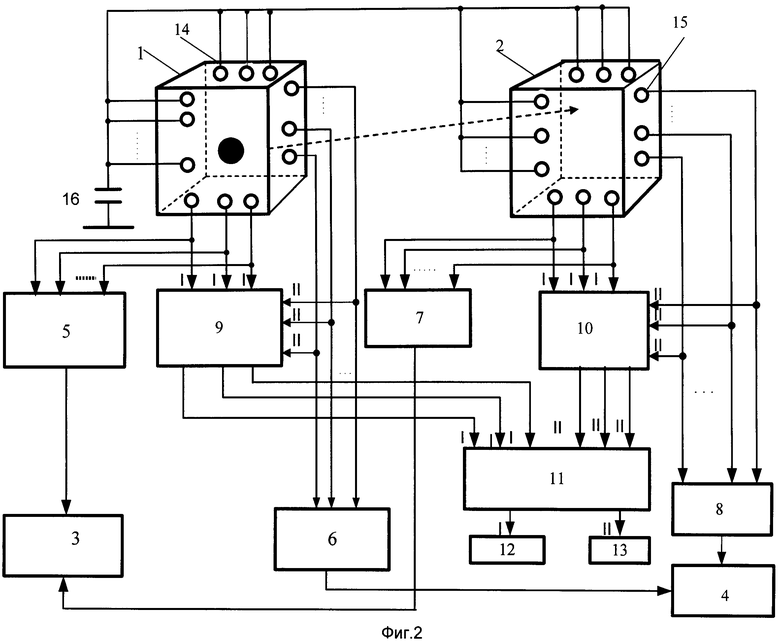
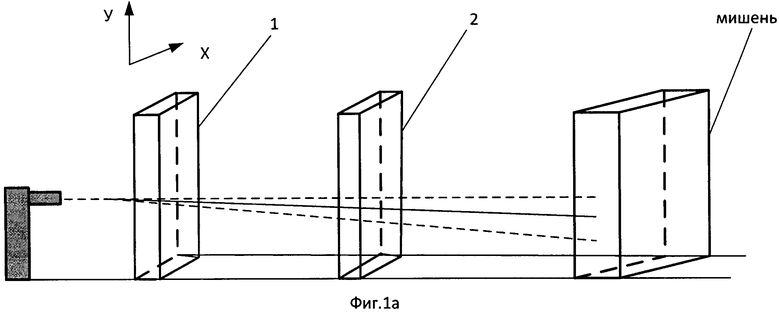
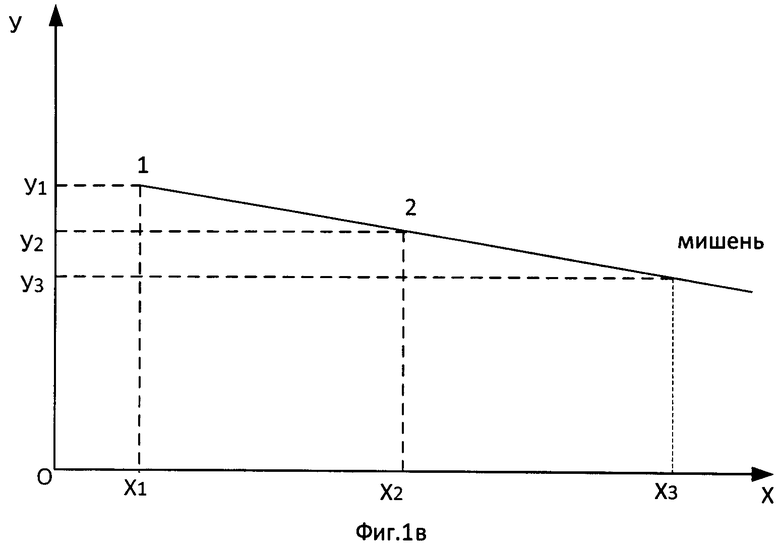
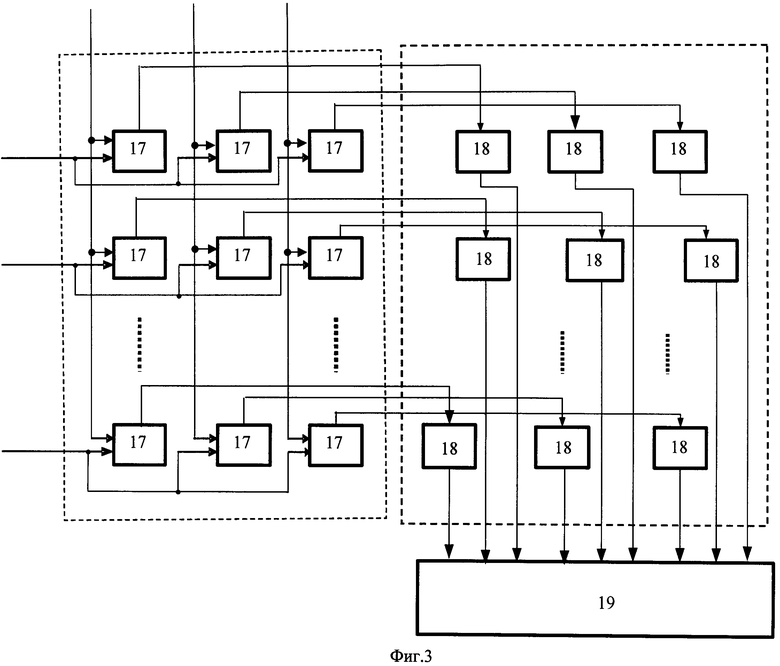
На фиг.1а - приведена схема движения снаряда к мишени, на фиг.1в - схема движения снаряда в плоскости ОХУ, на фиг.2 - структурная схема устройства определения условий подхода снаряда к мишени, на фиг.3 - структурная схема блока логики.
Устройство определения условий подхода снаряда к мишени, содержит первый 1 и второй датчик 2, которые разнесены в пространстве, первый 3 и второй 4 измерительный прибор, подключенный к выходам датчиков 1, 2, первый 5, второй 6, третий 7, четвертый 8 элемент ИЛИ, первый 9 и второй 10 блок логики, вычислитель 11 условий подхода снаряда к мишени, индикатор 12 углов подхода снаряда к мишени и индикатор 13 координат попадания снарядов в мишень, каждый из датчиков 1, 2 выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов 14 и линеек фотоприемников 15, источника 16 питания, причем выходы горизонтально расположенной линейки фотоприемников 15 первого 1 датчика соединены одновременно с входами первого 5 элемента ИЛИ и первыми входами первого 9 блока логики, выходы вертикально расположенной линейки фотоприемников 15 первого 1 датчика соединены одновременно с входами второго 6 элемента ИЛИ и вторыми входами первого 9 блока логики, выходы горизонтально расположенной линейки фотоприемников 15 второго 2 датчика соединены одновременно с входами третьего 7 элемента ИЛИ и первыми входами второго 10 блока логики, выходы вертикально расположенной линейки фотоприемников 15 второго 2 датчика соединены одновременно с входами четвертого 8 элемента ИЛИ и вторыми входами второго 10 блока логики, выход первого 5 и второго 6 элемента ИЛИ соединены соответственно с первыми входами первого 3 и второго 4 измерительных приборов, выходы третьего 7 и четвертого 8 элемента ИЛИ соединены соответственно со вторыми входами первого 3 и второго 4 измерительных приборов, выход источника 16 питания соединен с линейками излучающих диодов 12.
Блоки 9, 10 логики состоят из матриц элементов И 17, из матриц триггеров 18, блока 19 индикации, причем первые входы матрицы элементов И 17 соединены с первыми входами блока 9, 10 логики, а вторые входы соединены со вторыми входами блока 9, 10 логики, а выходы элементов И 17 соединены со входами триггеров 18, выходы которых соединены с блоком 19 индикации.
Причем выходы первого 9 и второго 10 блоков логики, соединены соответственно с первой и второй, группой входов вычислителя 11 условий подхода снаряда к мишени, первый и второй выходы которого соединены соответственно с входами индикатора 12 углов подхода снаряда и индикатора 13 координат попадания снарядов в мишень.
Вычислитель 11 условий подхода снаряда к мишени может быть изготовлен, например, на основе микроконтроллера.
Описание работы устройства.
Снаряд выстреливают в направление датчиков 1 и 2. В момент пролета снаряда относительно первого 1 датчика происходит срабатывание определенной комбинации чувствительных элементов линейки фотоприемников 15 (фиг.1a, фиг.1в).
Сигналы с выходов фотоприемников 15, датчика 1 через первые 5 и вторые 6 элементы ИЛИ поступают одновременно на запуск первого 3 и второго 4 измерительного прибора и на первые и вторые входы первого 9 блока логики (фиг.2).
В момент пролета снаряда относительно второго 2 датчика происходит срабатывание следующей комбинация чувствительных элементов линейки фотоприемников 15 (фиг.1а, фиг.1в).
Сигналы с выходов фотоприемников 15, второго 2 датчика через третий 7 и четвертый 8 элемент ИЛИ поступают одновременно на остановку первого 3 и второго 4 измерительного прибора и на первые и вторые входы второго 10 блока логики (фиг.2).
Таким образом, обеспечивается определение скорости снаряда путем измерения временного интервала его движения относительно двух разнесенных в пространстве датчиков.
Код сигнала, поступающий на первые и вторые входы блока 9 логики, соответствует координатам пролета снаряда относительно первого 1 датчика (фиг.1в) и обеспечивает срабатывания определенной комбинации матрицы элементов И 17, сигналы с выхода которых обеспечивают срабатывания комбинации матрицы триггеров 18, сигналы с выхода которых обеспечивают индикацию координат пролета снаряда относительно первого 1 датчика, блоком 19 индикации (фиг 3).
Аналогично определяются координаты снаряда относительно второго датчика.
Вычислитель 11 условий подхода снаряда к мишени обеспечивает определения углов подхода снаряда к мишени и координат его попаданий.
Для определения координат попаданий снаряда в мишень предварительно устанавливают второй 2 датчик относительно первого 1 на расстояние - m1, а мишень относительно первого датчика на расстояние - m2.
Сигналы, соответствующие координатам пролета снаряда относительно первого и второго датчиков, поступают с выходов первого 9 и второго 10 блоков логики на первые и вторые входы вычислителя 11 условий подхода снаряда к мишени (фиг.2).
Вычислитель 11 условий подхода снаряда к мишени определяет координаты попаданий снарядов в мишень в соответствие с приведенным выражением , , где x1, y1 - координаты пролета снаряда относительно первого датчика, x2, y2 - координаты пролета снаряда относительно второго датчика, - коэффициент, определяющий условия размещения второго датчика и мишени относительно первого датчика.
Вычислитель 11 условий подхода снаряда к мишени, определяет углы подхода снаряда к мишени в виде в виде выражении:  , , где X, Y - координаты вектора движения снаряда.
, , где X, Y - координаты вектора движения снаряда.
При этом координаты X, Y вектора движения снаряда, при условии Z=0, определяются в соответствии с выражением:
При этом длина вектора движения снаряда, при условии Z=0, определяется в соответствии с выражением:
 , или
, или
 .
.
С выходов вычислителя 11 условий подхода снаряда к мишени, сигналы поступают на входы индикатора 12 углов подхода снаряда и индикатора 13 координат попадания снаряда.
Таким образом, предлагаемое изобретение обеспечивает определение условий подхода снаряда к мишени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОЛЯ ПОРАЖЕНИЯ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2502947C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565802C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСЛОВИЙ ПОПАДАНИЯ ПОСТОРОННИХ ПРЕДМЕТОВ В ВОЗДУХОЗАБОРНИК ВОЗДУШНОГО СУДНА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ | 2021 |
|
RU2776325C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470310C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСЛОВИЙ ПОПАДАНИЯ ПОСТОРОННИХ ПРЕДМЕТОВ В ВОЗДУХОЗАБОРНИК ВОЗДУШНОГО СУДНА С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ | 2021 |
|
RU2782849C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564684C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОСКОЛОЧНОГО ПОЛЯ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2482440C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК СНАРЯДОВ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576333C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК РАССЕИВАНИЯ СНАРЯДОВ ПРИ СТРЕЛЬБЕ ИЗ АРТИЛЛЕРИЙСКОГО ОРУЖИЯ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568271C1 |
Изобретение относится к области полигонных испытаний, в частности для определений условий подхода снаряда к мишени. Способ заключается в использовании датчиков в виде линеек фотоприемников, размещенных в вертикальной и горизонтальной плоскостях, фиксации сработавших элементов фотоприемников первого и второго датчиков в момент пролета снаряда, определении координат движения метаемого тела, выдачи информации о скорости метаемого тела, координат его пролета относительно первого и второго датчиков и углов похода снаряда к мишени. Изобретение позволяет повысить информативность определения условий подхода снаряда к мишени. 2 н.п. ф-лы, 3 ил.
1. Способ определения условий подхода снаряда к мишени, заключающийся в измерении скорости снаряда, в изготовлении датчиков в виде линеек фотоприемников, размещенных в вертикальной и горизонтальной плоскостях, фиксации сработавших элементов фотоприемников первого и второго датчиков в момент пролета снаряда, определении координат движения метаемого тела, выдаче информации о скорости метаемого тела и координат его пролета относительно первого и второго датчиков, отличающийся тем, что размещают первый и второй датчик на расстоянии - m1, первый датчик и мишень на расстоянии - m2, фиксируют динамику изменения координат снаряда и на этой основе определяют координаты попадания снаряда в мишень в виде выражений: , , где x1, y1, x2, y2 - координаты пролета снаряда относительно первого и второго датчиков, - коэффициент, определяют углы подхода снаряда к мишени в виде выражений:
 , , где X, Y - координаты вектора движения снаряда.
, , где X, Y - координаты вектора движения снаряда.
2. Устройство для определения условий подхода снаряда к мишени, содержащее два разнесенных в пространстве датчика, первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены со входами триггеров, выходы которых соединены с блоком индикации, отличающееся тем, что введены вычислитель определения условий подхода снаряда к мишени и индикатор углов подхода снаряда к мишени и индикатор координат попадания снаряда в мишень, причем выходы первого и второго блоков логики, соединены соответственно с первой и второй группой входов вычислителя определения условий подхода снаряда к мишени, первый и второй выходы которого соединены соответственно с индикатором углов подхода снарядов к мишени и индикатором координат попадания снаряда в мишень.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2009 |
|
RU2401430C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2005 |
|
RU2285267C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ МЕТАЕМОГО ТЕЛА | 2006 |
|
RU2326388C1 |
| US 6931166 B2, 16.08.2005 | |||
| US 7650256 B2, 19.01.2010 | |||
| Композиция для покрытий | 1974 |
|
SU525733A1 |

