ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение касается первой системы для реализации команд соответствующей автоматической или ручной системы управления полетом силового профиля крыла или буксировочного воздушного змея, в частности для преобразования энергии ветра в электрическую или механическую энергию посредством полета буксировочного воздушного змея, соединенного с помощью двух тросов с преобразовательными устройствами на земле. Упомянутая первая система для реализации команд расположена на земле, при этом рассматриваемые команды могут сводиться к заданию разности длин двух тросов.
Кроме того, настоящее изобретение касается второй системы для реализации команд соответствующей автоматической или ручной системы управления полетом силового профиля крыла или буксировочного воздушного змея, в частности для преобразования энергии ветра в электрическую или механическую энергию посредством полета буксировочного воздушного змея, соединенного с помощью одного или более тросов с преобразовательными устройствами на земле. Упомянутая вторая система для реализации команд расположена на воздушном змее, при этом рассматриваемые команды могут сводиться к изменению угла атаки воздушного змея либо к изменению эффективной площади воздушного змея, либо к изменению геометрии воздушного змея, так чтобы создать соответствующие аэродинамические силы и механические моменты на самом воздушном змее, либо более чем к одному из упомянутых эффектов одновременно.
Кроме того, настоящее изобретение касается управления взлетом с земли и возвратом на землю буксировочных воздушных змеев, в частности для преобразования энергии ветра в электрическую или механическую энергию посредством полета буксировочного воздушного змея, соединенного с помощью, по меньшей мере, одного троса с преобразовательными устройствами на земле.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из некоторых предшествующих патентов известны процессы преобразования энергии ветра в электрическую или механическую энергию с помощью устройств, способных преобразовывать механическую энергию, сгенерированную ветровым потоком, в другой вид энергии, обычно электрическую энергию, в которых энергия ветра отбирается с использованием буксировочных воздушных змеев, соединенных с упомянутыми устройствами посредством тросов. Например, в патентах США № US 4076190, US 4251040, US 6254034 Bl и US 6914345 B2, патентной заявке США № US 20090072092, патентной заявке Италии № TO2003A000945 и европейской патентной заявке № EP 04028646.0 описаны системы для преобразования кинетической энергии ветровых течений в электрическую энергию посредством управления полетом буксировочных воздушных змеев, соединенных с землей с помощью одного или более тросов. Известны также системы для преобразования кинетической энергии ветровых течений в электрическую энергию, в которых, по меньшей мере, один воздушный змей соединен посредством тросов с модулем для маневрирования и генерирования энергии, закрепленным на земле: в упомянутых системах воздушный змей циклически проходит через фазу вытягивания, при которой он поднимается, толкаемый ветром, и во время которой разматывание тросов приводит во вращение генератор модуля на земле, выполненный с возможностью генерирования электрической энергии, а также фазу возвращения в исходное состояние, при которой воздушный змей возвращается в исходное положение и далее маневрирует, так чтобы снова уловить ветер.
В других известных решениях энергия преобразуется при сохранении длины тросов постоянной, при этом силы, воздействующие на тросы, приводят к поступательному перемещению вдоль заданной циклической траектории наземного модуля, оснащенного колесами, подключенными к электрическим генераторам.
В прошлом также были предложены различные решения в отношении буксирования судна с помощью устройств, улавливающих воздушные течения посредством буксировочных воздушных змеев, такие как описаны, в частности, в патенте Великобритании № GB 2098951, в патенте США № US 5056447, в патенте США № US 5435259, в международном патенте № WO 03097448, в патентной заявке США № US 2004035345, в патентной заявке США № US 2004200396, в международном патентном документе № WO 2005100147, в международном патенте № WO 2005100148, в международном патентном документе № WO 2005100149, а также в патентной заявке Германии № DE102004018814.
В некоторых из упомянутых систем воздушный змей «привязан» к земле с помощью двух тросов и управляется посредством создания различия длин, называемого в настоящем описании «разностью длин», между этими двумя тросами. В упомянутых системах используется исполнительный модуль, расположенный на земле, при этом перед ним стоят задачи по существу двух типов: разматывание или наматывание двух тросов на одинаковую величину и задание разности длин. Способ задания разности длин, уже предложенный на предшествующем уровне техники, представляет собой способ, заключающийся в возложении задачи создания заданной величины разности длин на два независимых электрических двигателя/генератора, каждый из которых соединен с лебедкой, через которую проходит соответствующий трос. Другое решение предложено в международной патентной заявке № WO 2008/072269, в которой представлен вариант осуществления, нацеленный на разграничение функций управления разностью длин и наматыванием/разматыванием тросов на одинаковую величину. Упомянутое изобретение состоит из, по меньшей мере, одного первого исполнительного двигателя, предназначенного для реализации разности длин, а также, по меньшей мере, одного второго исполнительного двигателя, предназначенного для разматывания/наматывания тросов на одинаковую величину.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложены улучшенные и более эффективные решения по сравнению с теми, что известны, главная общая характеристика которых определена в п.1 формулы изобретения.
В первом варианте осуществления используется одиночный маломощный двигатель, а во втором варианте осуществления предусмотрен одиночный двигатель/генератор высокой мощности, к которому примыкает система для аккумулирования и передачи энергии. Первое решение разработано специально для генерирующих систем, работающих с тросами фиксированной длины, в то время как второе решение разработано специально для генерирующих систем, в которых используется циклическое наматывание и разматывание тросов. В отношении обоих генераторов, работающих как с тросом постоянной длины, так и с тросом переменной длины, настоящее изобретение дополнительно отличается тем, что в нем предложена система для собирания тросов, способная наматывать тросы без образования наслоений, что приводит к снижению износа тросов и уменьшает количество проблем управления наматыванием.
Помимо этого появляются существенные преимущества в управлении воздушным змеем с использованием второй исполнительной системы в дополнение к первой исполнительной системе для реализации разности длин, которая установлена на борту воздушного змея и способна вызвать изменение угла атаки воздушного змея либо изменение эффективной площади воздушного змея, либо изменение геометрии воздушного змея, так чтобы создать соответствующие аэродинамические силы и механические моменты на самом воздушном змее, либо более чем один из упомянутых эффектов одновременно, согласно команде, определяемой соответствующей системой автоматического управления или задаваемой человеком-оператором посредством соответствующего человеко-машинного интерфейса. В этом отношении в настоящем изобретении предложена вторая исполнительная система, которая установлена на воздушном змее и способна влиять на полет воздушного змея, как описано выше.
Наконец, важным аспектом управления упомянутыми системами преобразования энергии ветра в механическую и электрическую энергию посредством полета буксировочных воздушных змеев является управление этапами взлета с земли и возврата на землю буксировочных воздушных змеев. В настоящем изобретении предложены две возможные системы для решения задачи такого рода.
Таким образом, в настоящем изобретении предложены новые и улучшенные решения по сравнению с теми, что известны на предшествующем уровне техники, путем обеспечения первого решения для первой системы, расположенной на земле, для реализации команды на задание разности длин, которое разработано специально для генерирующих систем, работающих с тросами фиксированной длины, второго решения для первой системы, расположенной на земле, для реализации команды на задание разности длин, которое разработано специально для генерирующих систем, работающих с тросами, длина которых циклически изменяется, второй системы для реализации команд, расположенной на воздушном змее, первого возможного решения и процедуры взлета с земли и возврата на землю жестких или полужестких буксировочных воздушных змеев, второго возможного решения и процедуры взлета с земли и возврата на землю жестких или полужестких буксировочных воздушных змеев.
В одном варианте осуществления изобретения предложена исполнительная система для управления полетом силового профиля крыла или буксировочного воздушного змея 7, управляемого посредством, по меньшей мере, двух тросов 8 для преобразования энергии ветра в электрическую или механическую энергию, содержащая первый модуль для оказания воздействия путем равного разматывания/наматывания упомянутых тросов, а также второй модуль, установленный между упомянутым буксировочным воздушным змеем 7 и упомянутым первым модулем, для оказания воздействия путем управления разностью длин упомянутых тросов 8, при этом упомянутая система отличается тем, что содержит одиночный двигатель 3, 15.
При этом первый модуль для оказания воздействия путем равного разматывания/наматывания упомянутых тросов содержит первый вал 11 и второй вал 12, а второй модуль для оказания воздействия путем управления разностью длин тросов содержит первый ползун 2а, второй ползун 2b, первый направляющий блок 4а и второй направляющий блок 4b.
В другом варианте осуществления изобретения упомянутый одиночный двигатель 3 управляет только упомянутым вторым модулем управления разностью длин в отношении упомянутых тросов 8, а упомянутый первый модуль содержит для каждого троса 8 два набора шкивов 9, 10 для наматывания троса без наложения, установленных на соответствующих общих горизонтальных валах 11, 12, расположенных один над другим, при этом вал 12 нижнего набора намоточных шкивов 10 имеет возможность вертикального перемещения относительно вала 11 верхнего набора намоточных шкивов 9 и функционально связан с системой 13 тормоза и противовеса.
В другом варианте осуществления изобретения упомянутый одиночный двигатель представляет собой двигатель/генератор 15, управляющий как упомянутым первым модулем с помощью соединительного средства 16, которое может быть избирательно введено в зацепление и выведено из зацепления, так и вторым модулем посредством энергоаккумулирующей системы 17.
В другом варианте осуществления изобретения первый модуль содержит для каждого троса 8 два набора шкивов 9, 10 для наматывания троса без наложения, установленных на соответствующих общих горизонтальных валах 11, 12, расположенных один над другим, при этом расстояние между общими валами 11, 12 упомянутых двух наборов шкивов 9, 10 может быть изменено в результате отхода нижнего вала 12 относительно верхнего вала 11 с помощью противовеса 13b с возможностью избирательного изменения.
В другом варианте осуществления изобретения смещение упомянутого нижнего вала 12 может избирательно быть заблокировано с помощью тормоза 13а.
В другом варианте осуществления изобретения упомянутый одиночный двигатель 3 управляет первым и вторым направляющими блоками 4а, 4b для упомянутых тросов 8, которые могут быть смещены во взаимно противоположных направлениях и перемещаются соответственно с помощью первого ползуна 2а и с помощью второго ползуна 2b, способных поступательно перемещаться во взаимно противоположных направлениях и несущих соответствующие зубчатые рейки, входящие в зацепление с зубчатым колесом, непосредственно приводимым во вращение упомянутым одиночным двигателем 3.
В другом варианте осуществления изобретения упомянутый одиночный двигатель 15 управляет первым направляющим блоком 4а и вторым направляющим блоком 4b для упомянутых тросов 8, которые могут быть смещены во взаимно противоположных направлениях и перемещаются соответственно с помощью первого ползуна 2а и с помощью второго ползуна 2b, способных поступательно перемещаться во взаимно противоположных направлениях и несущих соответствующие зубчатые рейки, входящие в зацепление с зубчатым колесом 20, приводимым во вращение опосредованно упомянутым одиночным двигателем 15 с помощью упомянутой энергоаккумулирующей системы 17 с рабочей текучей средой.
В другом варианте осуществления изобретения система дополнительно включает в себя третий направляющий блок 5а и четвертый направляющий блок 5b для упомянутых тросов 8, отдельные от упомянутого первого ползуна 2а и упомянутого второго ползуна 2b, установленные между упомянутым первым направляющим блоком 4а, а также упомянутым вторым направляющим блоком 4b и упомянутыми шкивами 9, 10 для намотки тросов 8 без наложения.
В другом варианте осуществления изобретения между буксировочным воздушным змеем 7 и вторым модулем управления разностью длин тросов 8 установлено устройство 6 для натяжения и демпфирования колебаний тросов 8.
В другом варианте осуществления изобретения устройство 6 для натяжения и демпфирования дополнительно выполнено с возможностью обнаружения усилий, воздействующих на тросы 8.
В другом варианте осуществления изобретения в системе имеется средство 14 демпфирования, функционально связанное с упомянутыми третьим и четвертым направляющими блоками 5а, 5b.
В другом варианте осуществления изобретения каждый из упомянутых тросов 8 соединен с концами упомянутого буксировочного воздушного змея 7 посредством, по меньшей мере, одной пары строп 23, намотанных на соответствующие блоки 24, а также тем, что предусмотрено исполнительное средство 25 с приводом от двигателя, установленное на упомянутом буксировочном воздушном змее 7 для избирательного изменения длины упомянутых строп 23.
В другом варианте осуществления изобретения упомянутое исполнительное средство 25 с приводом от двигателя выполнено с возможностью изменения длины упомянутых строп 23, так чтобы изменять угол атаки упомянутого буксировочного воздушного змея 7.
В другом варианте осуществления изобретения упомянутый буксировочный воздушный змей 7 образован взаимно сочлененными секторами 27, а также тем, что предусмотрено исполнительное средство 28 с приводом от двигателя, установленное на упомянутом буксировочном воздушном змее 7 для избирательного изменения положения упомянутых секторов 27 относительно друг друга, а значит, изменения геометрии упомянутого буксировочного воздушного змея 7.
В другом варианте осуществления изобретения упомянутые секторы 27 взаимно соединены тросами 26, длина которых может изменяться с помощью упомянутого исполнительного средства 28 с приводом от двигателя.
В другом варианте осуществления изобретения упомянутые исполнительные средства 25, 28 с приводом от двигателя приводятся в действие фотоэлектрической или ветровой энергией, сгенерированной на борту упомянутого буксировочного воздушного змея 7.
В другом варианте осуществления изобретения упомянутый буксировочный воздушный змей 7 имеет жесткую или полужесткую конструкцию.
В другом варианте осуществления изобретения буксировочный воздушный змей 7 оснащен ходовой частью 31 для взлета/посадки, а взлет с земли и возврат на землю упомянутого буксировочного воздушного змея 7 выполняются посредством упомянутой исполнительной системы.
В другом варианте осуществления изобретения упомянутый буксировочный воздушный змей 7 оснащен, по меньшей мере, одним вспомогательным двигателем для взлета.
Предпочтительные варианты осуществления и варианты настоящего изобретения образуют предмет зависимых пунктов формулы изобретения.
В ходе описания предполагается, что, по меньшей мере, один воздушный змей соединен с землей посредством, по меньшей мере, двух тросов, с помощью которых возможна подача команды посредством разности длин.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет описано подробнее со ссылкой на некоторые предпочтительные варианты осуществления, предложенные в качестве не ограничивающих примеров, со ссылкой на прилагаемые чертежи, где:
- фиг. 1 схематично изображает первое решение для первой системы, предназначенной для реализации управления полетом силовых профилей крыла или буксировочных воздушных змеев посредством разности длин, разработанное для генерирующих систем, работающих с тросами фиксированной длины;
- фиг. 2 схематично изображает второе решение для первой системы, предназначенной для реализации управления полетом силовых профилей крыла или буксировочных воздушных змеев посредством разности длин, разработанное для генерирующих систем, работающих с тросами, длина которых циклически изменяется;
фиг. 3 схематично изображает предпочтительный вариант осуществления второй системы, которая расположена на воздушном змее, предназначенной для реализации управления полетом силовых профилей крыла или буксировочных воздушных змеев;
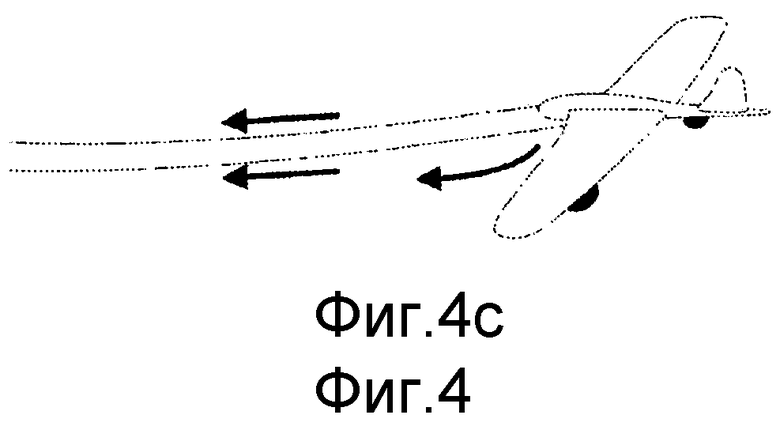
- фиг. 4 схематично изображает первое возможное решение и процедуру взлета с земли и возврата на землю жестких или полужестких силовых профилей крыла или буксировочных воздушных змеев;
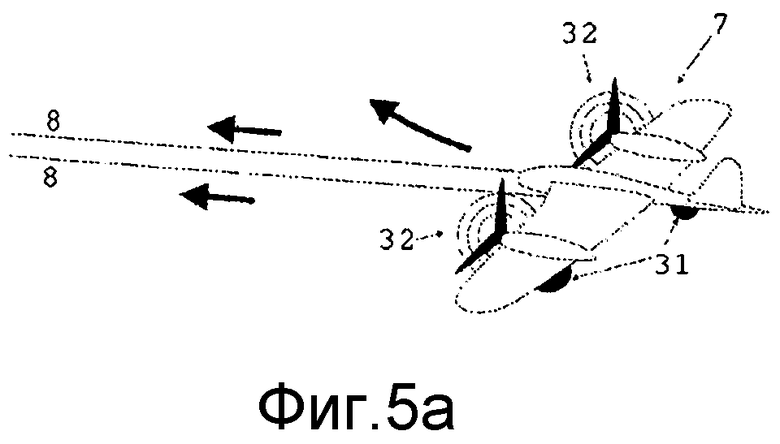
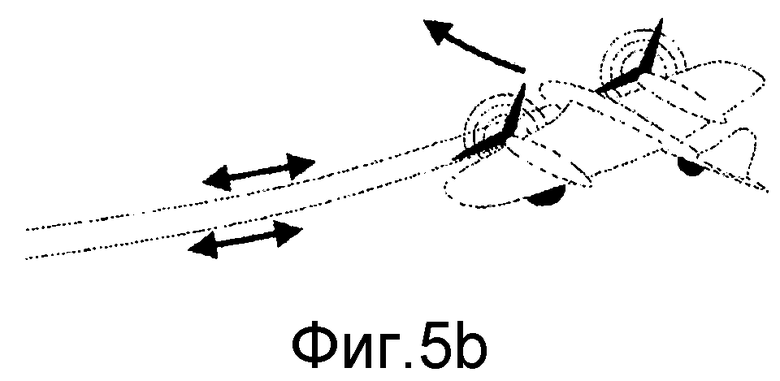
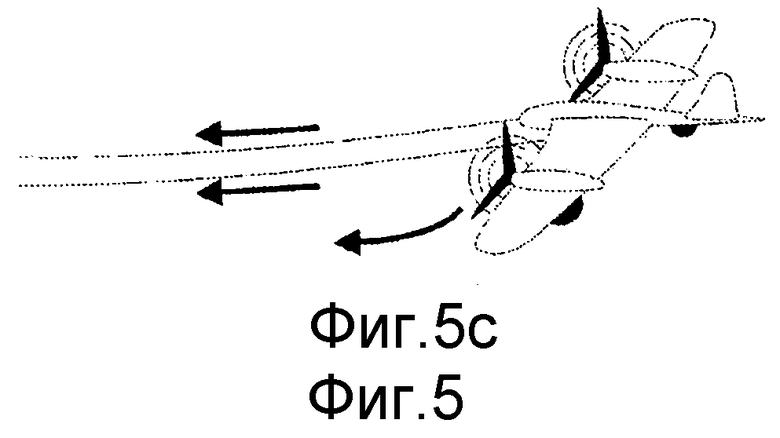
- фиг. 5 схематично изображает второе возможное решение и процедуру взлета с земли и возврата на землю жестких или полужестких силовых профилей крыла или буксировочных воздушных змеев.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
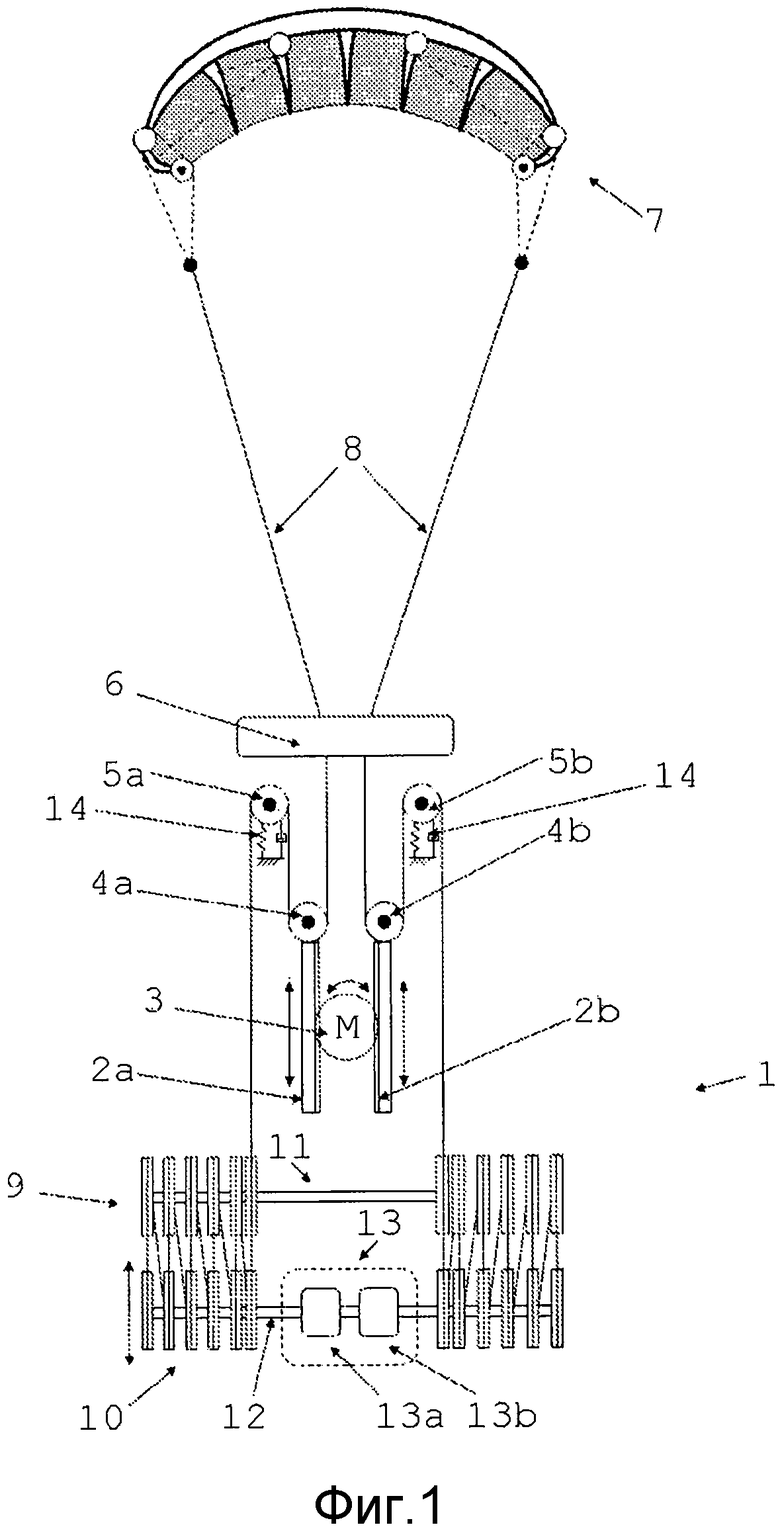
Если обратиться к фиг. 1, можно заметить, что в первом решении первая система 1 для реализации управления полетом посредством разности длин тросов, по меньшей мере, одного силового профиля крыла или воздушного змея согласно настоящему изобретению содержит:
- одиночный исполнительный двигатель 3, управляющий посредством зубчатой передачи (не изображена) и соответствующих зубчатых реек двумя ползунами 2а и 2b, относительно которых зафиксированы соответственно два направляющих блока 4а и 4b, через которые проходят тросы 8, поступающие с третьего направляющего блока 5а и четвертого направляющего блока 5b, при этом последние, например, зафиксированы относительно земли или возможно соединены со средством 14 демпфирования, но в любом случае не зафиксированы относительно ползунов 2а и 2b;
- устройство 6 для натяжения и демпфирования, разработанное для натяжения тросов 8, демпфирования колебаний силы, действующей на тросы 8, а также возможно измерения сил, действующих на тросы 8 на участке между направляющими блоками 4а и 4b и воздушным змеем 7;
- набор поддерживаемых валом 11 шкивов 9, число, диаметр и ширина которых соответствующим образом подобраны согласно диаметру и длине тросов 8;
- набор поддерживаемых валом 12 направляющих шкивов 10, число, диаметр и ширина которых соответствующим образом подобраны согласно диаметру и длине тросов 8; шкивы 10 и вал 12 расположены ниже шкивов 9 и вала 11 и способны поступательно перемещаться вертикально, приближаясь к упомянутым элементам 9 и 11 или отдаляясь от них;
- систему 13 тормоза 13а и противовеса 13b, применяемую для вала 12, способную поступательно перемещаться вертикально, а также блокировать посредством тормоза 13а поступательное перемещение вала 12 относительно вала 11; вес противовеса 13b может варьироваться, т.е. может избирательно изменяться в зависимости от силы, которая должна действовать на тросы, например, с помощью водоналивной системы, известной на предшествующем уровне техники и используемой для распределения веса на судах.
Можно отметить, как работа двигателя 3 приводит к возникновению различия между длинами двух тросов 8 на стороне воздушного змея 7 посредством поступательного движения ползунов 2а и 2b. Например, вращение двигателя 3 по часовой стрелке на схеме варианта осуществления, представленного в качестве примера на фиг. 1, приводит к укорачиванию троса, проходящего через блок 4b, на стороне воздушного змея 7, и одновременно приводит к удлинению троса, проходящего через блок 4а, на стороне воздушного змея 7. При соответствующем управлении двигателем 3, таким образом, имеется возможность выдать команду для требуемой разности длин. Следует отметить, что шкивы 9, шкивы 10, вал 11 и вал 12 составляют «разделительную систему», посредством которой изменение длины тросов 8 на стороне воздушного змея 7 приводит к изменению меньшего по величине расстояния между валом 12 и валом 11, при этом пропорцию можно откалибровать в соответствии с диаметром и количеством шкивов 9 и 10. Когда генерирующая система находится в нормальных рабочих условиях с фиксированным тросом, вал 12 заблокирован тормозом 13а, так что расстояние от вала 11 остается фиксированным, при этом длина троса 8 также остается фиксированной, даже под воздействием растягивающих усилий, создаваемых воздушным змеем. Когда необходимо перемотать тросы, например, при отсутствии ветра или в целях технического обслуживания, воздушным змеем маневрируют так, что силы растяжения в тросах минимальны, при этом система противовеса 13b и тормоза 13а находится в разгруженном состоянии, что приводит к уходу вала 12 от вала 11 и соответствующей перемотке тросов. Последующее разматывание тросов, чтобы вернуться к рабочим условиям, выполняется благодаря тяговому усилию, создаваемому воздушным змеем при наличии ветра, так чтобы преодолеть трение шкивов и вес системы тормоза 13а и противовеса 13b переменной величины.
Если теперь обратиться к фиг. 2, можно отметить, что во втором решении, которое разработано специально для генерирующих систем, работающих с тросами, длина которых циклически изменяется, первая система 21 для реализации управления полетом посредством разности длин тросов, по меньшей мере, одного силового профиля крыла или воздушного змея согласно настоящему изобретению содержит элементы 2а, 2b, 4а, 4b, 5а, 5b, 6, 7, 8, 9, 10, 11, 12, 14, аналогичные тем, что описаны ранее со ссылкой на фиг. 1, при этом элементы 3 и 13b отсутствуют, а элементы 15, 16, 17, 18, 19, 20 добавлены. В частности, в данном втором решении представлено соединительное средство 16 (система сцеплений), способное избирательно и независимо соединять и отсоединять валы 11 и 18 относительно одиночного двигателя/генератора 15. Двигатель/генератор 15, будучи соединенным с валом 11, способен генерировать энергию во время разматывания тросов и снабжать энергией на этапе перематывания. Будучи соединенным с валом 18, двигатель/генератор 15 может дополнительно управлять системой 17 аккумулирования энергии, например, гидропневматического типа. Система 17, например, может быть образована компрессором и резервуаром. Когда заданное давление достигнуто, соединительное средство 16 отключает соединение между двигателем 15 и валом 18, пока накопление давления в системе 17 не потребуется снова. Система 17 также содержит исполнительную систему, например, с пневматическими клапанами, способную вызвать поступательное перемещение зубчатой рейки 19, находящейся в зацеплении на зубчатом колесе (передаче) 20, которое, в свою очередь, находится в зацеплении с зубчатыми рейками на ползунах 2а и 2b. Очевидно, что поступательное перемещение зубчатой рейки 19 влево на фиг. 2 приведет к вращению зубчатого колеса 20 по часовой стрелке, сопровождаемому увеличением длины левого троса и сокращением длины правого троса на стороне воздушного змея 7, что задает требуемую разность длин. На фиг. 2 элементы 16, 17 и 18 подробно не представлены, поскольку технология их построения известна.
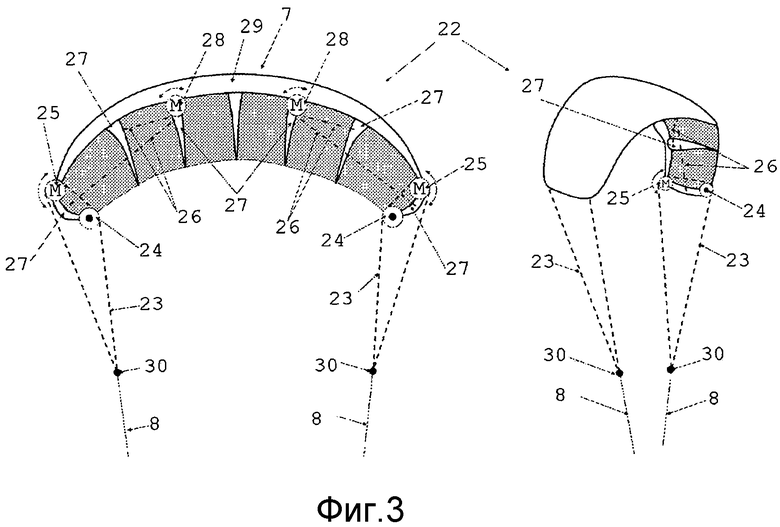
Как показано на фиг. 3, вторая система 22 для реализации управления полетом силовых профилей крыла или буксировочных воздушных змеев согласно настоящему изобретению, показанная на фиг. 3 на двух различных изображениях общего вида, содержит:
- по меньшей мере, две стропы 23, каждая из которых связана крепежным элементом 30 с одним из двух тросов 8 и специально выполнена так, чтобы иметь возможность проходить через блоки 24. Стропы 23 приводятся в движение двигателями 25 или исполнительными средствами 25 с приводом от двигателя. Скоординированная работа двигателей 25 приводит к изменению регулировки строп 23, увеличивая или уменьшая угол атаки воздушного змея 7 в зависимости от направления вращения двигателей 25. Таким образом, существует возможность изменять угол атаки воздушного змея 7. Кроме того, вращение двух двигателей 25 в противоположных направлениях приводит к двум различным регулировкам для строп 23 воздушного змея 7, создавая, таким образом, аэродинамический момент, способный вызвать поворот воздушного змея 7, тем самым изменяя его траекторию;
- по меньшей мере, два набора, по меньшей мере, из двух тросов 26, каждый из которых соединен на одном конце с конструкционным элементом 27 (также называемым сектором) воздушного змея 7, а на другом конце - с одним из, по меньшей мере, двух двигателей 28 или исполнительных средств 28 с приводом от двигателя. Работа двигателей 28 приводит к наматыванию и разматыванию тросов 26 и к соответствующему приближению или удалению конструкционных элементов 27, что вызывает изменение формы и эффективной площади воздушного змея 7. Можно отметить, что при разматывании тросов 26 конструкционные элементы 27 отдаляются вследствие аэродинамических сил, воздействующих на воздушного змея 7.
Двигатели 25, 28 и блоки 24 должным образом связаны с воздушным змеем 7, например, посредством крепления к конструкционному элементу 29, который также называют «передним краем». Передний край 29 и конструкционные элементы 27 соответствующим образом созданы так, чтобы обеспечить возможность изменения формы и эффективной площади воздушного змея вследствие работы двигателей 28, как описано ранее. Энергия, необходимая для работы двигателей 28, подается соответствующими аккумулирующими системами, возможно граничащими с энергогенерирующими системами на воздушном змее 7 на основании, например, фотоэлектрической или ветровой энергии (например, ветровыми микротурбинами и солнечными микропанелями), о которых также будет сказано далее.
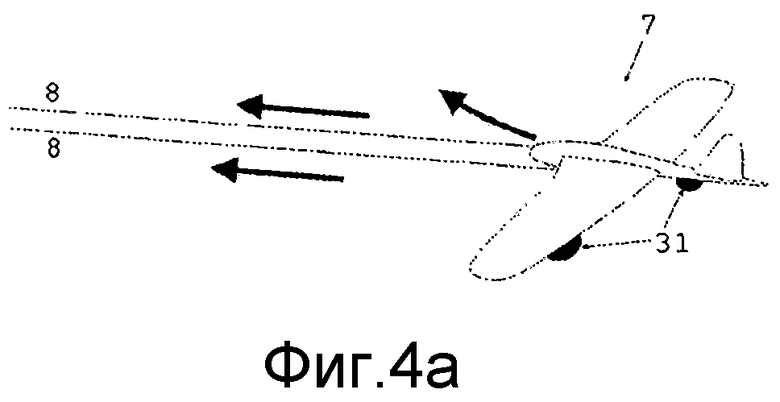
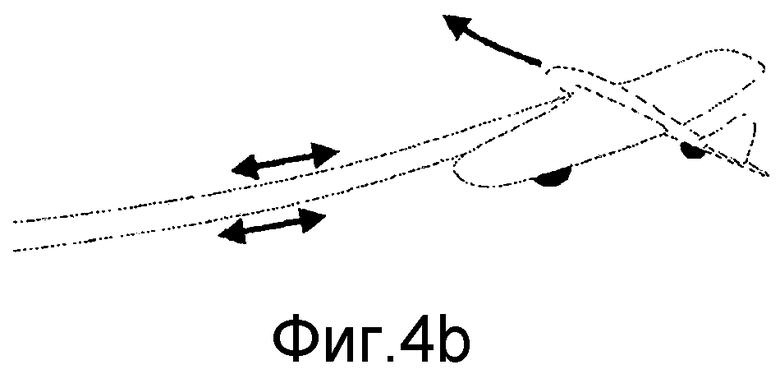
Если теперь обратиться к фиг. 4, можно отметить, что первая система взлета с земли и возврата на землю силовых профилей крыла или буксировочных воздушных змеев образована:
- по меньшей мере, одним жестким или полужестким воздушным змеем 7, соединенным с тросами 8 и снабженным соответствующими опорными системами, представляющими собой, например, ходовую часть 31 для взлета/посадки, такую как шасси с колесами, уже образующую составную часть предшествующего уровня техники, которая позволит воздушному змею 7 перемещаться по земле с высокой скоростью при малом трении. Воздушный змей 7 может быть оборудован системами для реализации команд, такими как описаны ранее, и/или представлять собой беспилотный летательный аппарат (БЛА) согласно техническим решениям, уже существующим в предшествующем уровне техники.
Этап взлета с земли согласно настоящему изобретению, схематично представленный на фиг. 4, начинается с того, что воздушный змей 7 находится на земле, при этом тросы 8 выложены на землю (фиг. 4а). Путем разматывания тросов 8 с соответствующей скоростью, например с использованием систем, подобных тем, что рассмотрены в двух технических решениях первой системы для реализации команд, представленных ранее, воздушный змей 7 набирает высоту под действием подъемной силы, развиваемой при скорости наматывания тросов. Во время полета (фиг. 4b) воздушный змей маневрирует, так чтобы обеспечить генерацию энергии согласно способам, предусмотренным используемым генератором, например при тросе фиксированной длины или тросе переменной длины, согласно изобретениям, подобным тем, что процитированы ранее, и другим решениям, составляющим часть предшествующего уровня техники. На этапе возврата (фиг. 4с) воздушный змей 7 выполняет посадку, при этом тросы перематываются, не прилагая к воздушному змею больших усилий натяжения, чтобы не подвергать опасности при посадке, что сопровождается малым потреблением энергии. Первая система для взлета с земли и возврата на землю буксировочных воздушных змеев, описанная выше, отличается от технических решений, уже предложенных в предшествующем уровне техники и использующих единственный трос, благодаря наличию двух тросов 8. Второй трос служит для распределения усилий, прилагаемых со стороны буксировочного воздушного змея, а также для реализации управления воздушным змеем посредством разности длин тросов, например, посредством первой исполнительной системы, описанной ранее в двух возможных вариантах осуществления со ссылкой на фиг. 1 и на фиг. 2; наконец, упомянутый второй трос обеспечивает более высокую степень безопасности, создавая возможность возврата в исходное положение в случае отказа одного из двух тросов.
Если теперь обратиться к фиг. 5, можно отметить, что вторая система взлета с земли и возврата на землю буксировочных воздушных змеев содержит элементы 7, 8, 31, аналогичные тем, что описаны ранее в первой системе взлета с земли и возврата на землю буксировочных воздушных змеев. Кроме того, вторая система взлета с земли и возврата на землю буксировочных воздушных змеев содержит, по меньшей мере, одну систему 32 воздушных винтов, связанную, по меньшей мере, с одним дополнительным электрическим двигателем/генератором, используемую частично или в полном объеме для создания силы тяги при взлете (фиг. 5а), для генерации энергии на борту воздушного змея во время полета, а также для создания тягового усилия для воздушного змея во время полета, если это необходимо (фиг. 5b), и, наконец, для создания тягового усилия для воздушного змея во время посадки, если это необходимо (фиг. 5с).
Выше описаны некоторые варианты осуществления изобретения, однако, разумеется, они могут претерпеть дополнительные модификации и изменения, не выходящие за пределы объема изобретения.
Изобретение относится к системам управления полетом силового профиля крыла или буксировочного воздушного змея для преобразования энергии ветра в электрическую или механическую энергию. Исполнительная система для управления полетом силового профиля крыла или буксировочного воздушного змея, управляемого посредством, по меньшей мере, двух тросов (8) для преобразования энергии ветра в электрическую или механическую энергию, содержащая первый модуль (11, 12) для оказания воздействия путем разматывания-наматывания тросов на одинаковую величину, а также второй модуль (2a, 2b, 4a, 4b), установленный между буксировочным воздушным змеем (7) и первым модулем (11, 12), для оказания воздействия путем управления разностью длин тросов (8). В системе применяется одиночный двигатель (3) или двигатель/генератор (15). Изобретение направлено на управление этапами взлета с земли и возврата на землю буксировочных воздушных змеев. 18 з.п. ф-лы, 5 ил.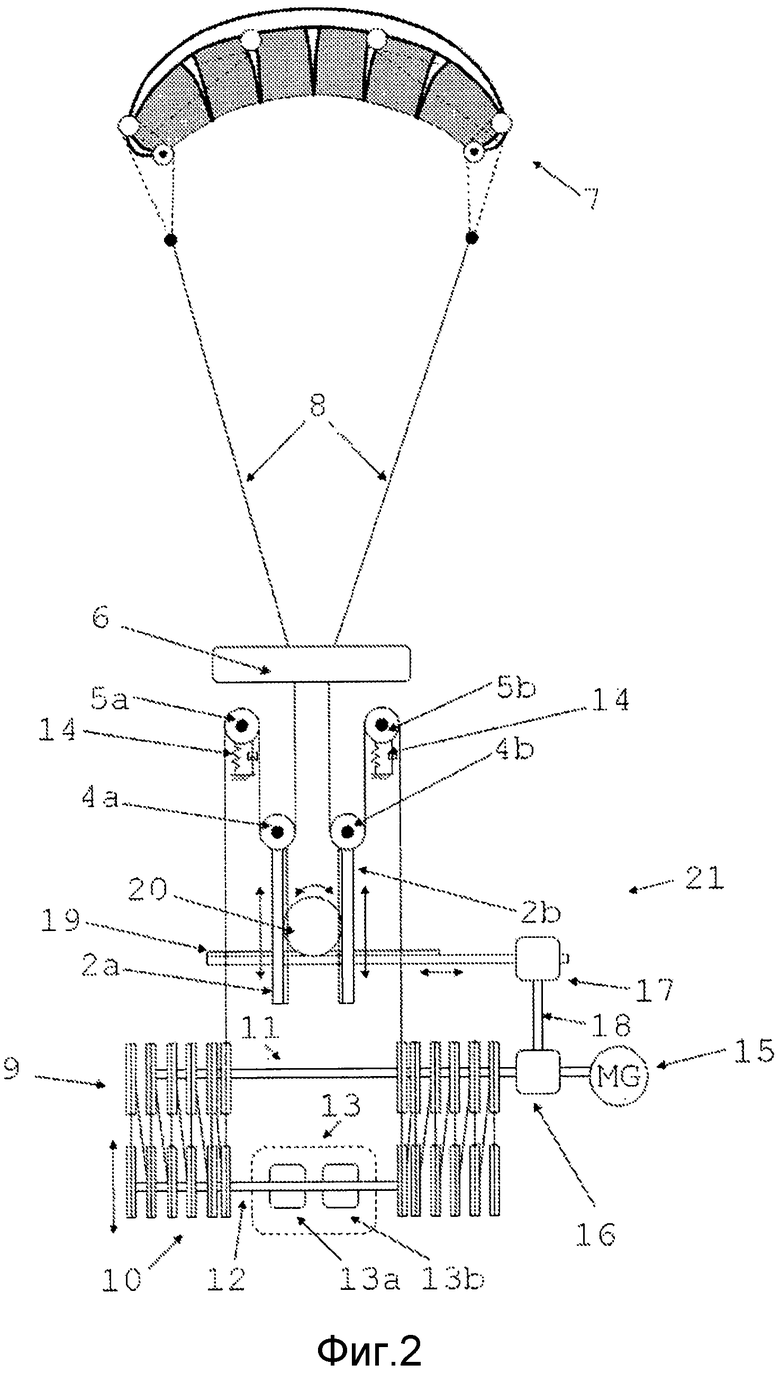
1. Исполнительная система для управления полетом силового профиля крыла или буксировочного воздушного змея (7), управляемого посредством, по меньшей мере, двух тросов (8) для преобразования энергии ветра в электрическую или механическую энергию, содержащая первый модуль (11, 12) для оказания воздействия путем равного разматывания/наматывания упомянутых тросов, а также второй модуль (2а, 2b, 4а, 4b), установленный между упомянутым буксировочным воздушным змеем (7) и упомянутым первым модулем (11, 12), для оказания воздействия путем управления разностью длин упомянутых тросов (8), при этом упомянутая система отличается тем, что содержит одиночный двигатель (3, 15).
2. Система по п. 1, отличающаяся тем, что упомянутый одиночный двигатель (3) управляет только упомянутым вторым модулем (2а, 2b) управления разностью длин в отношении упомянутых тросов (8), а также тем, что упомянутый первый модуль содержит для каждого троса (8) два набора шкивов (9, 10) для наматывания троса без наложения, установленных на соответствующих общих горизонтальных валах (11, 12), расположенных один над другим, при этом вал (12) нижнего набора намоточных шкивов (10) имеет возможность вертикального перемещения относительно вала (11) верхнего набора намоточных шкивов (9) и функционально связан с системой (13) тормоза и противовеса.
3. Система по п. 1, отличающаяся тем, что упомянутый одиночный двигатель представляет собой двигатель/генератор (15), управляющий как упомянутым первым модулем (11, 12) с помощью соединительного средства (16), которое может быть избирательно введено в зацепление и выведено из зацепления, так и вторым модулем (4а, 4b) посредством энергоаккумулирующей системы (17).
4. Система по п. 3, отличающаяся тем, что первый модуль содержит для каждого троса (8) два набора шкивов (9, 10) для наматывания троса без наложения, установленных на соответствующих общих горизонтальных валах (11, 12), расположенных один над другим, при этом расстояние между общими валами (11, 12) упомянутых двух наборов шкивов (9, 10) может быть изменено в результате отхода нижнего вала (12) относительно верхнего вала (11) с помощью противовеса (13b) с возможностью избирательного изменения.
5. Система по п. 2, отличающаяся тем, что смещение упомянутого нижнего вала (12) может избирательно быть заблокировано с помощью тормоза (13а).
6. Система по п. 2, отличающаяся тем, что упомянутый одиночный двигатель (3) управляет первым и вторым направляющими блоками (4а, 4b) для упомянутых тросов (8), которые могут быть смещены во взаимно противоположных направлениях и перемещаются соответственно с помощью первого ползуна (2а) и с помощью второго ползуна (2b), способных поступательно перемещаться во взаимно противоположных направлениях и несущих соответствующие зубчатые рейки, входящие в зацепление с зубчатым колесом, непосредственно приводимым во вращение упомянутым одиночным двигателем (3).
7. Система по п. 3, отличающаяся тем, что упомянутый одиночный двигатель (15) управляет первым направляющим блоком (4а) и вторым направляющим блоком (4b) для упомянутых тросов (8), которые могут быть смещены во взаимно противоположных направлениях и перемещаются соответственно с помощью первого ползуна (2а) и с помощью второго ползуна (2b), способных поступательно перемещаться во взаимно противоположных направлениях и несущих соответствующие зубчатые рейки, входящие в зацепление с зубчатым колесом (20), приводимым во вращение опосредованно упомянутым одиночным двигателем (15) с помощью упомянутой энергоаккумулирующей системы (17) с рабочей текучей средой.
8. Система по п. 6, отличающаяся тем, что дополнительно включает в себя третий направляющий блок (5а) и четвертый направляющий блок (5b) для упомянутых тросов (8), отдельные от упомянутого первого ползуна (2а) и упомянутого второго ползуна (2b), установленные между упомянутым первым направляющим блоком (4а), а также упомянутым вторым направляющим блоком (4b) и упомянутыми шкивами (9, 10) для намотки тросов (8) без наложения.
9. Система по п. 2, отличающаяся тем, что между буксировочным воздушным змеем (7) и вторым модулем (2а, 2b, 4а, 4b) управления разностью длин тросов (8) установлено устройство (б) для натяжения и демпфирования колебаний тросов (8).
10. Система по п. 9, отличающаяся тем, что устройство (6) для натяжения и демпфирования дополнительно выполнено с возможностью обнаружения усилий, воздействующих на тросы (8).
11. Система по п. 8, отличающаяся тем, что имеется средство (14) демпфирования, функционально связанное с упомянутыми третьим и четвертым направляющими блоками (5а, 5b).
12. Система по п. 1, отличающаяся тем, что каждый из упомянутых тросов (8) соединен с концами упомянутого буксировочного воздушного змея (7) посредством, по меньшей мере, одной пары строп (23), намотанных на соответствующие блоки (24), а также тем, что предусмотрено исполнительное средство (25) с приводом от двигателя, установленное на упомянутом буксировочном воздушном змее (7) для избирательного изменения длины упомянутых строп (23).
13. Система по п. 12, отличающаяся тем, что упомянутое исполнительное средство (25) с приводом от двигателя выполнено с возможностью изменения длины упомянутых строп (23), так чтобы изменять угол атаки упомянутого буксировочного воздушного змея (7).
14. Система по п. 1, отличающаяся тем, что упомянутый буксировочный воздушный змей (7) образован взаимно сочлененными секторами (27), а также тем, что предусмотрено исполнительное средство (28) с приводом от двигателя, установленное на упомянутом буксировочном воздушном змее (7) для избирательного изменения положения упомянутых секторов (27) относительно друг друга, а значит, изменения геометрии упомянутого буксировочного воздушного змея (7).
15. Система по п. 14, отличающаяся тем, что упомянутые секторы (27) взаимно соединены тросами (26), длина которых может изменяться с помощью упомянутого исполнительного средства (28) с приводом от двигателя.
16. Система по п. 12, отличающаяся тем, что упомянутые исполнительные средства (25, 28) с приводом от двигателя приводятся в действие фотоэлектрической или ветровой энергией, сгенерированной на борту упомянутого буксировочного воздушного змея (7).
17. Система по п. 1, отличающаяся тем, что упомянутый буксировочный воздушный змей (7) имеет жесткую или полужесткую конструкцию.
18. Система по п. 1, отличающаяся тем, что буксировочный воздушный змей (7) оснащен ходовой частью (31) для взлета/посадки, а также тем, что взлет с земли и возврат на землю упомянутого буксировочного воздушного змея (7) выполняются посредством упомянутой исполнительной системы.
19. Система по п. 17 или 18, отличающаяся тем, что упомянутый буксировочный воздушный змей (7) оснащен, по меньшей мере, одним вспомогательным двигателем для взлета.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Устройство для измерения расстояния до поверхности | 1988 |
|
SU1672214A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ОХЛАДИТЕЛЬНЫМ ДОЖДЕВАНИЕМ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 1993 |
|
RU2098946C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Высотная ветросиловая электроустановка | 1927 |
|
SU8970A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВЕТРА В ЭЛЕКТРИЧЕСКУЮ ЭНЕРГИЮ | 2008 |
|
RU2380569C1 |

