Настоящее изобретение относится к способу производства электрической энергии при помощи ветряной системы для преобразования энергии посредством турбины с вертикальной осью, приводимой в действие посредством служащих источником движущей силы крыловидных профилей (в общем определяемых как "змейковые аэростаты").
В прошлом проблема производства энергии с низкими затратами с использованием возобновляемых источников энергии уже рассматривалась, в частности, в некоторых предшествующих патентах, упомянутых ниже, были предложены способы преобразования энергии ветра при помощи нескольких устройств, которые используют энергию ветра при помощи змейковых аэростатов.
В частности, патент США №4124182 описывает устройство, снабженное "пара-змейковыми аэростатами" (или "модифицированными парашютами") для отбора энергии ветра и преобразования ее во вращательное движение вала, который приводит в действие генератор. Это устройство отличается парой "групп пара-змейковых аэростатов", в которых все змейковые аэростаты расположены последовательно. Каждая группа снабжена силовым тросом. Такие тросы имеют длину, недостаточную для достижения группами пара-змейковых аэростатов высот, на которых дуют более сильные и более стабильные ветры относительно тех, которые дуют на уровне земной поверхности. Каждая группа соединена соответствующим силовым тросом с барабаном или лебедкой, направление вращения которой может изменяться для наматывания тросов или сматывания их благодаря эффекту тяги ветровым течением. Каждая группа пара-змейковых аэростатов снабжена вторым тросом, называемым "купольным тросом", соединенным с каждым змейковым аэростатом группы и при помощи которого можно выборочно свертывать пара-змейковые аэростаты для облегчения процесса наматывания. Через редуктор вращательное движение каждой лебедки передается генератору, который, когда он приводится в действие, производит электроэнергию. Применена единая система шкивов, которая через муфты и вращательные зубчатые передачи обеспечивает притягивание одной группы пара-змейковых аэростатов, в то время как другая поднимается. Энергия ветра в таком случае преобразуется в механическую энергию, которая частично сразу расходуется на притягивание группы пара-змейковых аэростатов, куполы которых были свернуты, и частично преобразуется в электрическую энергию. При помощи воздушного шара, соединенного с каждой группой и накачиваемого и спускаемого при каждом рабочем цикле, пара-змейковые аэростаты удерживаются на желательной высоте, и куполы сохраняют установленную ориентацию.
Патент Китая 1052723 описывает ветряной генератор тока, снабженный парой змейковых аэростатов, при помощи которых тяга, создаваемая ветровыми течениями, преобразуется при помощи высокопрочных тросов во вращение барабана, расположенного на уровне земли. Лебедка приводит в действие гидравлический двигатель, при помощи которого осуществляется производство электроэнергии.
Патент Великобритании 2317422 описывает устройство, снабженное множеством змейковых аэростатов, которые, благодаря эффекту действия ветра, вращают вертикальный вал, соединенный с генератором, для производства электроэнергии. Змейковые аэростаты движутся ветром по круговой траектории в горизонтальной плоскости. Каждый змейковый аэростат снабжен устройством, способным модифицировать угол встречи с ветром для обеспечения непрерывности полета.
Патент США 6072245 описывает устройство для использования энергии ветра, составленное множеством змейковых аэростатов, соединенных с тросами, формирующими петлю. Змейковые аэростаты приводятся в действие для чередования восходящего движения и нисходящего движения, определяющего вращательное круговое движение всегда в одном направлении. Каждый змейковый аэростат соединен с силовым тросом для передачи механической энергии и с системой привода тросов для регулирования начального угла ветра для каждого змейкового аэростата. Силовой трос производит вращение шкивов, при помощи которых осуществляется выработка электроэнергии. Используются приводные тросы для придания каждому змейковому аэростату положения на его восходящей траектории, обеспечивающего подъем змейкового аэростата вверх ветром, и второго положения на его нисходящей траектории, в котором змейковый аэростат подвергается меньшей тяге ветром.
Патент США №6254034 описывает устройство, снабженное змейковым аэростатом ("привязным летательным аппаратом"), толкаемым ветровыми течениями с управляемой скоростью, для использования энергии ветра. Змейковый аэростат соединен при помощи троса с лебедкой, которая приводит в действие генератор для производства электрической энергии. На борту змейкового аэростата смонтирована приводная система, которая определяет и модифицирует угол встречи с ветром и модифицирует площадь захваченного фронта ветра. Такая система управляется с земли оператором, который считывает с дисплея данные, переданные соответствующими датчиками, или автоматически при помощи системы дистанционного управления. Змейковый аэростат приводится в действие для подъема по ветру с большим углом встречи. После окончания подъема начальный угол уменьшают, и змейковый аэростат планирует против ветра. Змейковый аэростат возвращается, планирует вновь по ветру, и цикл повторяется.
Патент Нидерландов 1017171С описывает устройство, подобное описанному выше устройству, в котором, однако, ручное управление не предусмотрено и в котором возвращение змейкового аэростата происходит посредством наклона змейкового аэростата подобно флагу для минимизации тяги ветра при сматывании тросов.
Патент США №6523781 описывает устройство, составленное змейковым аэростатом ("змейковым аэростатом с профилем крыла"), при помощи которого может отбираться энергия ветра, имеющим переднюю кромку, заднюю кромку и две боковые кромки. Такой змейковый аэростат приводится в действие при помощи механизма, несомого самим змейковым аэростатом. Это устройство снабжено тросами, соединенными с кромками змейкового аэростата, и змейковый аэростат приводится в действие посредством изменения, при помощи этих тросов, угла тангажа. Привод питается по электрическим кабелям, расположенным в силовом тросе, который соединяет змейковый аэростат с лебедкой, которая приводит в действие генератор для производства электроэнергии. Змейковый аэростат поднимается, толкаемый ветром, с использованием подъемной силы и движется по траектории, которая является почти перпендикулярной направлению скорости ветра. После завершения подъема змейковый аэростат возвращается и впоследствии приводится в действие для захвата ветра снова.
Патент США №2005046197 описывает устройство, снабженное змейковым аэростатом для использования энергии ветра, которая производит электроэнергию посредством приведения в действие при помощи тросов лебедки, соединенной с генератором. Змейковый аэростат приводится в действие при помощи дополнительных тросов, при помощи которых угол встречи с ветром может быть изменен. Змейковый аэростат поднимается с большим углом встречи. После завершения подъема начальный угол минимизируется, и змейковый аэростат возвращается таким образом, что цикл начинается снова.
Как можно отметить, анализируя предшествующий уровень техники, известные ветряные системы, снабженные змейковыми аэростатами, имеют следующие общие признаки:
Змейковые аэростаты снабжены и силовыми тросами, и приводными тросами, что означает, что нагрузка от тросов, которая производит электроэнергию, не передается к механизмам управления змейковым аэростатом, а передается другим компонентам ветряной системы при помощи тросов, соответственно используемых для выполнения такой функции. Неиспользование силовых тросов для управления змейковыми аэростатами делает сложной конструкцию ветряной системы со следующими недостатками.
Змейковые аэростаты приводятся в действие при помощи механизмов, которые непосредственно установлены на змейковых аэростатах, или при помощи, по меньшей мере, четырех вспомогательных (приводных) тросов. Разматывание и сматывание этих тросов осуществляются при помощи лебедок, используемых только для такой цели, расположенных на уровне земли или подвешенных над землей (а именно, несомых самими змейковыми аэростатами). В случае использования приводных тросов размещение лебедок на уровне земли позволяет не тратить часть энергии, отбираемой из ветровых течений, для компенсации веса самих приводных механизмов.
Змейковые аэростаты приводятся в действие для производства электроэнергии благодаря подъему посредством использования силы тяги (а именно, компонента тяги ветра, параллельного скорости ветра). За этим этапом следует возвращение змейковых аэростатов посредством расположения змейкового аэростата как флага для минимизации тормозящего действия. В ограниченном количестве ветряных систем предполагалось использование подъемной силы (а именно, компонента тяги ветра, перпендикулярного скорости ветра) в дополнение к силе лобового сопротивления для подъема змейковых аэростатов. Преимущество, исходящее от использования этого последнего способа приведения в действие относительно предыдущего, состоит в том, что для производства электроэнергии используется не только сопротивление змейкового аэростата, но также и подъемная сила змейкового аэростата. Так или иначе, в обоих случаях, прерывистый рабочий цикл (чередование этапа подъема и этапа возвращения) подразумевает, что эффект лобового сопротивления змейковых аэростатов, при помощи которого происходит производство электроэнергии, присутствует только в ходе половины траектории, проходимой змейковыми аэростатами (оно фактически отсутствует в ходе возвращения).
Преобразование энергии происходит посредством сообщения, при помощи силовых тросов, вращения лебедкам, соединенным с генераторами, возможно, с применением редукторов. Это не позволяет производить энергию непрерывно в ходе рабочего цикла, так как возвращение змейкового аэростата происходит благодаря приведению в действие таких лебедок при помощи электродвигателей. Таким образом, генерирование электроэнергии прерывается при потреблении части предварительно произведенной энергии. Непрерывная подача тока внешним пользователям возможна с использованием аккумуляторов.
Внимание было сфокусировано исключительно на производстве электроэнергии при помощи циклического процесса. Выбором траектории, по которой движутся летающие змейковые аэростаты, для максимизации коэффициента преобразования энергии почти полностью пренебрегали.
Проблемы, относящиеся к системе управления змейковым аэростатом или группой, составленной из многих последовательно соединенных змейковых аэростатов, затронуты подробно в чрезвычайно ограниченном количестве проектов и исследований. Это связано также с тем фактом, что текущие исследования главным образом сфокусированы на увеличении производительности уже существующих систем вместо разработки новых систем производства энергии.
Для частичного решения вышеупомянутых проблем, Европейский патент 1672214, принадлежащий Sequoia Automatisation S.R.L., описывает систему для преобразования кинетической энергии ветровых течений в электрическую энергию при помощи прогнозирующей и адаптивной системы управления полетом змейковых аэростатов, соединенных с системой "карусельного" типа с использованием турбины с вертикальной осью.
Целью настоящего изобретения является решение вышеупомянутых проблем предшествующего уровня техники посредством создания ветряной системы для преобразования энергии посредством змейковых аэростатов, в которой преобразование энергии происходит при помощи, по меньшей мере, одного генератора, приводимого вращением стрел турбины с вертикальной осью, и в котором каждая стрела соединена при помощи одной пары тросов, по меньшей мере, с одним змейковым аэростатом, который, будучи толкаемым ветром и, соответственно, приводимым в действие, производит на уровне турбины крутящий момент, посредством которого стрелы вращаются.
Другой целью настоящего изобретения является создание ветряной системы, в которой змейковые аэростаты, которые составляют ветряную систему, приводятся в действие при помощи тех же тросов, при помощи которых энергия передается стрелами турбины с вертикальной осью.
Еще одной целью настоящего изобретения является создание ветряной системы, в которой змейковые аэростаты приводятся в действие системой управления с искусственным интеллектом, которая приводит в действие электродвигатели, соединенные с лебедками, возможно, с промежуточными редукторами, расположенными на уровне земли, причем их функция состоит и в управлении змейковыми аэростатами посредством сматывания и наматывания тросов, намотанных вокруг них, и в удерживании нагрузки тросов для преобразования энергии.
Еще одной целью настоящего изобретения является создание ветряной системы, в которой змейковые аэростаты приводятся в действие системой управления с искусственным интеллектом, которая в каждом рабочем цикле обеспечивает прохождение змейковыми аэростатами оптимальной траектории для оптимизации отбора энергии ветра.
Еще одной целью настоящего изобретения, кроме того, является создание ветряной системы, в которой змейковые аэростаты приводятся в действие для получения возможности преобразования энергии ветра главным образом с использованием подъемной силы и для получения траектории, на протяжении которой эффект тяги присутствует почти на всем протяжении рабочего цикла.
Кроме того, целью настоящего изобретения является создание способа производства электрической энергии при помощи ветряной системы, соответствующей настоящему изобретению, которая может приводиться в действие более эффективно относительно того, что предложено предшествующим уровнем техники.
Согласно изобретению создан способ производства электроэнергии при помощи ветряной системы, содержащей, по меньшей мере, один змейковый аэростат, управляемый с земли и погруженный в, по меньшей мере, одно ветровое течение, ветряную турбину с вертикальной осью, расположенную на уровне земли и снабженную, по меньшей мере, одной стрелой, соединенной при помощи двух тросов с змейковым аэростатом, приспособленным для приведения в действие при помощи турбины для вращения стрелы и осуществления преобразования энергии ветра в электрическую энергию при помощи, по меньшей мере, одной системы генератора/электродвигателя, работающей как генератор и взаимодействующей с турбиной, причем тросы приспособлены и для передачи механической энергии от змейковых аэростатов и к ним и для управления траекторией полета змейковых аэростатов, и систему управления с искусственным интеллектом, приспособленную для автоматического управления змейковыми аэростатами на траектории полета и снабженную набором датчиков, расположенных на змейковых аэростатах, и набором наземных датчиков, при этом способ содержит следующие этапы:
а) управление траекторией полета змейкового аэростата таким образом, что змейковый аэростат перемещается поперек относительно направления ветрового течения, натягивая тросы, соединенные со стрелой ветряной турбины, и вращая стрелу благодаря эффекту тяги, и отходит от стрелы, поднимая противовес системы накопления энергии;
б) управление траекторией полета змейкового аэростата таким образом, что змейковый аэростат перемещается в направлении ветрового течения, натягивая тросы, соединенные со стрелой, и вращая стрелу благодаря эффекту тяги, и приближается к стреле змейкового аэростата благодаря наматыванию тросов на первые лебедки при помощи первых электродвигателей без снижения противовеса системы накопления энергии;
в) управление траекторией полета змейкового аэростата таким образом, что змейковый аэростат перемещается поперечно относительно направления ветрового течения, натягивая тросы, соединенные со стрелой, и вращая стрелу благодаря к эффекту тяги, и отходит от стрелы посредством разматывания тросов через первые лебедки при помощи первых электродвигателей без снижения противовеса системы накопления энергии;
г) управление траекторией полета змейкового аэростата таким образом, что змейковый аэростат перемещается в противоположном направлении относительно направления ветрового течения, не создавая какого-либо тормозящего эффекта для вращения стрелы ветряной турбины, и приближается к стреле посредством снижения противовеса системы накопления энергии для приема змейкового аэростата в положении, начиная с которого он продолжает перемещение поперечно относительно направления ветрового течения;
д) повторение указанных этапов.
Ветряная система может содержать систему энергоснабжения, взаимодействующую с системой управления с искусственным интеллектом для управления аккумулированием или подачей энергии.
Набор датчиков, расположенных на змейковых аэростатах, может посылать информацию в беспроводном режиме системе управления с искусственным интеллектом.
Каждая стрела ветряной турбины может поддерживаться при помощи, по меньшей мере, одной опорной системы, при этом опорная система предпочтительно содержит стяжки, соединенные одним концом со стрелой и другим концом с единой вертикальной конструкцией, расположенной в центре турбины, и вращающиеся со стрелой, причем опорная система, предпочтительно, содержит стяжки, расположенные в плоскости вращения ветряной турбины, соединенные одним концом со стрелами и другим концом с центральным вращающимся валом турбины, при этом опорная система, предпочтительно, также содержит, по меньшей мере, одну демпфирующую тележку, посредством которой стрела может упруго опираться на землю, при этом опорная система, предпочтительно, снабжена упругим средством, соединенным параллельно, по меньшей мере, с одним демпфером, и демпфирующая тележка снабжена, по меньшей мере, одной парой колес, совмещенных с осями вращения, проходящими через центр вращения турбины.
Стрела ветряной турбины может содержать, по меньшей мере, одно возвращающее устройство, приспособленное для возвращения змейкового аэростата в состоянии покоя и предпочтительно содержащее, по меньшей мере, одну цилиндрическую трубу, предпочтительно снабженную закругленной выходной кромкой, причем возвращающее устройство предпочтительно наклонено относительно стрелы.
Стрела ветряной турбины может содержать, по меньшей мере, одну систему возвращения и запуска змейкового аэростата, предпочтительно расположенную внутри возвращающего устройства и предпочтительно содержащую, по меньшей мере, одну тележку, перемещающуюся по, по меньшей мере, двум направляющим внутри цилиндрической трубы возвращающего устройства и предпочтительно приводимую в действие, по меньшей мере, одним ремнем, приводимым редукторным электродвигателем, при этом система возвращения и запуска предпочтительно снабжена устройством создания искусственной тяги ветра, приспособленным для создания искусственного воздушного потока при запуске змейкового аэростата из устройства возвращения.
Стрела ветряной турбины может содержать систему натяжения и демпфирования тросов, предпочтительно снабженную, по меньшей мере, одним демпфируемым противовесом, поднятым от земли вследствие натяжения тросов и способным совершать поступательное вертикальное движение, при этом система натяжения и демпфирования предпочтительно снабжена, по меньшей мере, одним устройством, содержащим тягу, шарнирно подсоединенную вблизи конца стрелы и взаимодействующую со стрелой с расположением между ними упругого средства, предпочтительно представляющего собой, по меньшей мере, одну демпфирующую пружину.
Система натяжения и демпфирования тросов может представлять собой гидравлический аккумулятор.
Стрела ветряной турбины может содержать систему накопления потенциальной гравитационной энергии, предпочтительно содержащую, по меньшей мере, два понижающих скорость шкива и, по меньшей мере, один противовес, поднятый от земли вследствие натяжения тросов и способный совершать поступательное вертикальное движение, при этом тросы намотаны вокруг понижающих скорость шкивов, уменьшающие скорость шкивы предпочтительно расположены, соответственно, на нижнем уровне и на верхнем уровне и предпочтительно на верхнем уровне соединены со стрелой и на нижнем уровне соединены с противовесом.
Каждый трос может быть с чередованием обернут вокруг одного из понижающих скорость шкивов на верхнем уровне и одним из понижающих скорость шкивов на нижнем уровне.
Стрела ветряной турбины может содержать систему наматывания и разматывания тросов, предпочтительно содержащую, по меньшей мере, две первые лебедки, на каждой из которых соответствующий трос наматывается и разматывается, причем каждая из первых лебедок соединена с первым электродвигателем, управляемым системой управления с искусственным интеллектом, при этом первый электродвигатель предпочтительно представляет собой электрический генератор, причем вокруг каждой из первых лебедок соответствующий трос намотан посредством выполнения ограниченного количества витков таким образом, что получают один слой витков.
Система наматывания и разматывания тросов содержит, по меньшей мере, две пары обращенных друг к другу гусениц, выдвигаемых поршнями, причем между каждыми двумя из них вставлен один трос.
Стрела ветряной турбины может содержать, по меньшей мере, одну систему хранения тросов, предпочтительно содержащую, по меньшей мере, две вторые лебедки, на каждой из которых соответствующий один трос наматывается или разматывается, причем каждая из вторых лебедок соединена со вторым электродвигателем, управляемым системой управления с искусственным интеллектом, при этом вторая лебедка предпочтительно соединена со вторым электродвигателем с расположением между ними, по меньшей мере, одного планетарного редуктора и предпочтительно снабжена направляющим модулем, приспособленным для направления троса для упорядоченного наматывания на вторую лебедку, причем вторая лебедка предпочтительно установлена на тележке, скользящей по направляющей параллельно оси вращения второй лебедки, при этом скольжение тележки по направляющей предпочтительно управляется скользящим механизмом вместе с вращением второй лебедки, предпочтительно приводимым в действие электродвигателем, управляемым системой управления с искусственным интеллектом, при этом скользящий механизм предпочтительно соединен с электродвигателем с расположением между ними, по меньшей мере, одного планетарного редуктора.
Стрела дополнительно содержит систему передачи, приспособленную для направления тросов к змейковому аэростату и предпочтительно содержащую, по меньшей мере, одну пару первых шкивов, установленных на тележке системы возвращения и запуска змейковых аэростатов, вторые неподвижные шкивы, установленные стреле, по меньшей мере, одну пару третьих шкивов для каждой системы натяжения и демпфирования тросов, по меньшей мере, одну пару четвертых шкивов, установленных на ползунах направляющих модулей для тросов, при этом ползун предпочтительно приспособлен для скольжения по направляющей параллельно оси вращения второй лебедки системы хранения, причем скольжение ползуна по направляющей предпочтительно управляется скользящим механизмом вместе с вращением второй лебедки, при этом скользящий механизм предпочтительно приводится в действие третьим электродвигателем, управляемым системой управления с искусственным интеллектом и предпочтительно представляет собой механизм с винтовым приводом или с ременным приводом.
Система генератора/электродвигателя приводится в действие вращением стрел ветряной турбины, когда она работает как генератор, и управляется системой управления с искусственным интеллектом, когда она работает как электродвигатель, причем система генератора/электродвигателя предпочтительно содержит систему зубчатых передач, отличающуюся шестернями, приспособленными для умножения и тяги множества генераторов.
Система генератора/электродвигателя расположена на демпфирующих тележках и приводится в действие вращением колес, причем система генератора/электродвигателя предпочтительно соединена с колесами с расположением между ними, по меньшей мере, одного планетарного редуктора, при этом передача электрической энергии от системы генератора/электродвигателя к неподвижной части ветряной турбины предпочтительно осуществляется при помощи коллектора, расположенного в центре или вблизи направляющих.
Система управления с искусственным интеллектом может быть приспособлена для управления первыми и вторыми лебедками системы наматывания и разматывания тросов и системой хранения тросов для управления змейковым аэростатом на траектории полета при помощи обрабатывающего средства, выполняя, по меньшей мере, один прогнозирующий алгоритм, определяющий в каждый момент оптимальное положение, которое змейковые аэростаты должны занять, по меньшей мере, в один следующий момент в зависимости от параметров полета и управления, информации, посланной от набора датчиков, расположенных на змейковых аэростатах, и от набора наземных датчиков, отдавая приоритет подъемной силе, производимой ветровым течением.
Система управления с искусственным интеллектом может содержать подсистему безопасности, вмешивающуюся в управление змейковыми аэростатами для предотвращения столкновений в полете и предпочтительно приспособленную для взаимодействия с системой искусственного видения, представляющей собой систему оптического типа или микроволнового типа, при этом система обеспечения безопасности предпочтительно приспособлена для взаимодействия с системой срезания тросов, предпочтительно приспособленной для управления при помощи "сторожевого устройства".
При осуществлении способа этапы а) и/или б), и/или в), и/или г) и/или д) могут выполняться автоматически при помощи системы управления с искусственным интеллектом.
Настоящее изобретение будет лучше описано на основе некоторых предпочтительных вариантов его осуществления, данных как не вносящие ограничений примеры со ссылками на включенные сюда чертежи, на которых изображено следующее:
фиг.1 изображает вид в перспективе предпочтительного варианта выполнения ветряной системы согласно настоящему изобретению;
фиг.2 - увеличенный вид в перспективе ветряной системы, показанной на фиг.1;
фиг.3 - вид в перспективе предпочтительного варианта выполнения ветряной системы согласно настоящему изобретению;
фиг.4 - увеличенный вид в перспективе компонента ветряной системы, показанной на фиг.3;
фиг.5 - вид сбоку компонента, показанного на фиг.4;
фиг.6 - вид в плане компонента, показанного на фиг.3 и 4;
фиг.7 - вид в перспективе предпочтительного варианта выполнения другого компонента ветряной системы согласно настоящему изобретению;
фиг.8 - вид в перспективе предпочтительного варианта выполнения другого компонента ветряной системы согласно настоящему изобретению;
фиг.9 - схематический вид сбоку предпочтительного варианта выполнения компонента, показанного на фиг.8;
фиг.10 - увеличенный вид в перспективе компонента ветряной системы, показанной на фиг.3;
фиг.11 - увеличенный вид в перспективе компонента, показанного на фиг.10;
фиг.12 - увеличенный вид в перспективе другого компонента, показанного на фиг.10;
фиг.13 - схематический вид другого предпочтительного варианта выполнения компонента, показанного на фиг.12;
фиг.14 - схематический вид другого предпочтительного варианта выполнения компонента, показанного на фиг.12;
фиг.15 - схематический вид другого предпочтительного варианта выполнения компонента, показанного на фиг.12;
фиг.16 - схематический вид системы, соответствующей настоящему изобретению, в ходе некоторых этапов ее работы;
фиг.17 - схематический вид неподвижной аэродинамической поверхности, окруженной ветровым течением, и генерируемых связанных с ним сил;
фиг.18 - схематический вид аэродинамической поверхности, не проходящей в перпендикулярном направлении относительно направления скорости ветра, и генерируемых в связи с этим сил.
Как можно видеть более подробно в нижеследующем описании, в целом ветряная система, соответствующая настоящему изобретению, состоит из турбины с вертикальной осью, приспособленной для преобразования в электрическую энергию энергии ветра, захваченной в ветровом течении, предпочтительно, на уровне тропосферы (которая простирается приблизительно до 15 км от земной поверхности), при помощи змейковых аэростатов, погруженных в такое течение и соединенных со стрелами таких турбин, причем каждый из таких змейковых аэростатов приводится в действие при помощи лебедок с сервоусилителем, которые автономно приводятся в действие системой управления с искусственным интеллектом, отличающейся от существующего уровня техники прежде всего режимами, в которых змейковые аэростаты приводятся в действие для движения по траектории, когда такие змейковые аэростаты максимизируют коэффициент преобразования энергии, и архитектурой турбины с вертикальной осью.
Как показано на фигурах, ветряная система для преобразования энергии согласно настоящему изобретению содержит, по меньшей мере, один змейковый аэростат 1, погруженный в ветровое течение W и соединенный при помощи двух тросов 4, по меньшей мере, с одной стрелой 3 ветряной турбины 2 с вертикальной осью, расположенной на уровне земли, причем такой змейковый аэростат 1 приспособлен для приведения в действие при помощи такой турбины 2 для вращения стрелы 3, с которой он соединен, и выполнения преобразования энергии ветра в электрическую энергию при помощи, по меньшей мере, одной системы 15а или 15b генератора/электродвигателя, работающей как генератор и взаимодействующей с турбиной 2. Тросы 4 приспособлены также для передачи механической энергии от змейкового аэростата 1 и к нему для приведения в действие турбины 2 и управления траекторией полета самого змейкового аэростата 1.
Можно отметить, что типичный вариант выполнения ветряной системы согласно настоящему изобретению, показанный на фигурах, предусматривает использование ветряной турбины 2 с вертикальной осью, снабженной двумя стрелами 3, причем с концом каждой из них соединен соответствующий змейковый аэростат 1; однако совершенно ясно, что можно использовать турбины 2 с другим количеством стрел 3 и змейковых аэростатов 1, соединенных с ними, не отступая от объема настоящего изобретения. В частности, можно предусматривать соединение с каждой стрелой 3 турбины 2 множества змейковых аэростатов 1, расположенных последовательно (группа змейковых аэростатов 1), для суммирования их тяги, воздействующей на тросы 4. Каждая группа змейковых аэростатов 1 соединена с турбиной 2 при помощи одной системы тросов 4, и, таким образом, принцип действия устройства не зависит от количества последовательно соединенных змейковых аэростатов 1. Преимущество, обеспеченное использованием змейковых аэростатов 1, состоит в увеличении поверхности встречи с ветром, перехватываемым такими змейковыми аэростатами, и, следовательно, в увеличении момента, приводящего в действие турбину 2, и электрической энергии, которая может быть произведена при каждом рабочем цикле, как будет описано ниже более подробно.
Змейковые аэростаты 1 погружаются в захватываемые ветровые течения, и их выполняют посредством тканья волокон, обычно используемых при производстве специальных парусов для некоторых спортивных занятий, таких как, например, серфинг и картинг. Змейковые аэростаты 1 могут быть полностью гибкими или полужесткими, и их полужесткость получают благодаря использованию очень легкой рамы, посредством чего змейковый аэростат может принимать форму, например, подобную форме жестких крыльев. Обращение к полужесткости обеспечивает большое улучшение характеристик благодаря облегчению управления. Базовым техническим требованием, которое характеризует змейковые аэростаты, является общая площадь поверхности. Благодаря последним аэродинамическим исследованиям на рынке доступны змейковые аэростаты, которые способны удовлетворить некоторые потребности в отношении контроля и управляемости. Посредством пригодного управления змейковым аэростатом можно изменять передачу энергии ветра. Это существенно, так как змейковые аэростаты 1 должны управляться таким образом, чтобы тяга, прилагаемая ветровыми течениями, была максимальной и в то же время не ослабляла вращение стрел 3 турбины 2. Для каждой стрелы 3 змейковые аэростаты 1 должны именно приводиться в действие для получения момента на уровне турбины 2, который всегда сохраняется в одном направлении вращения или, возможно, устраняется, таким образом, не будучи противоположным направлению генерирования тока. Такой результат достигнут посредством надлежащего модулирования передачи энергии ветра, как будет видно более подробно далее.
Ветряная система, соответствующая настоящему изобретению, также содержит систему управления с искусственным интеллектом, работающую на турбине 2, при помощи которой осуществляется автоматическое управление полетом змейковых аэростатов 1, и систему энергоснабжения, взаимодействующую с такой системой управления с искусственным интеллектом для управления накоплением и подачей электроэнергии.
Система управления с искусственным интеллектом взаимодействует с набором датчиков с автономным питанием, расположенных на змейковых аэростатах 1, которые посылают информацию, предпочтительно, в беспроводном режиме наземным компонентам самой системы с искусственным интеллектом. Система управления с искусственным интеллектом объединяет эти элементы информации с другой информацией, поступающей от набора наземных датчиков (например, о величине нагрузки на тросы, определенной посредством считывания крутящих моментов электродвигателя, как указано ниже), и выполняет обработки для автоматического управления змейковыми аэростатами 1 в ходе работы ветряной системы.
Как показано на фиг.2-6, каждая стрела 3 ветряной турбины 2 с вертикальной осью удерживается опорной системой 5а или 5b. В конце каждой стрелы 3 также расположено возвращающее устройство 6 змейкового аэростата 1, объединенное системой 7 для возвращения и запуска змейкового аэростата 1, подобной показанной на фиг.7. Тросы 4 проходят вдоль каждой стрелы 3 к центру турбины 2, будучи приводимыми системой передачи, снабженной, по меньшей мере, одной системой 8 натяжения тросов 4. Вблизи с центром турбины 2 каждая стрела 3 снабжена системой 9 накопления энергии для компенсации внезапных изменений нагрузки системой 10 наматывания и разматывания тросов 4, отличающейся парой первых лебедок 11 для привода змейковых аэростатов 1, и системой 12 хранения для тросов, составленной парой вторых лебедок 13. Каждая вторая лебедка 13 системы хранения снабжена направляющим модулем 14, который направляет трос 4 для упорядоченного наматывания на соответствующую вторую лебедку 13. Вращение стрел 3 турбины 2 приводит в действие при помощи промежуточных редукторов генераторы/электродвигатели 15а или 15b в зависимости от генераторов преобразования энергии.
Змейковые аэростаты 1 приводятся в действие посредством сматывания и наматывания тросов 4 на их соответствующих первых лебедках 11. Тросы 4 в этом случае являются соединительными и передаточными элементами для силы между змейковыми аэростатами 1 и стрелами 3 турбины 2. Когда змейковые аэростаты 1 подняты ветром, они определяют вращение стрел 3 турбины 2 и, следовательно, преобразование энергии при помощи генераторов/электродвигателей 15а или 15b в зависимости от генераторов. Очевидно, что длина и диаметр каждого троса 4 зависят от ветра и условий безопасности, в которых следует работать. Стрелы 3 также используются при запуске ветряной системы для облегчения подъема змейковых аэростатов 1. В конце каждой стрелы 3, фактически, расположено устройство 6 возвращения, которое возвращает змейковый аэростат 1, когда ветряная система не работает. Запуск змейкового аэростата 1 требует, по меньшей мере, наличия легкого бриза на уровне земли. Если ветер недостаточен на малых высотах, генераторы/электродвигатели 15а или 15b приводятся в действие в зависимости от электродвигателей для вращения стрел 3, которые преобразуют движущий вращающий момент в бриз, который позволяет змейковым аэростатам 1 подняться.
Конструкция каждой стрелы 3 может быть, например, решетчатой подобно обычным подъемным установкам ("кранам"), используемым в строительной отрасли. Такая конструкция фактически удовлетворяет необходимому требованию легкости для оптимизации преобразования энергии.
Вблизи центра турбины 2 стрелы 3 прикреплены к вращающемуся валу 16 относительно неподвижной части турбины 2 и соединяются с последней вблизи вращающихся элементов.
Количество стрел 3, которыми ветряная турбина 2 должна быть снабжена, зависит от мощности, которую необходимо выдавать.
Опорная система 5а или 5b стрел 3 представляет собой компонент турбины 2, который содействует удерживанию веса каждой стрелы 3 и тяги тросов 4, для исключения деформаций, производимых усилиями в конструкции, которые нарушат работу ветряной системы.
Для выполнения опорной системы 5а или 5b, предпочтительно, могут быть приняты два устройства. Первое устройство 5а, показанное на фиг.2, состоит в удерживании стрел 3 турбины 2 с использованием первой и второй систем стяжек. Первая система составлена из первых стяжек 17, соединенных одним из их концов со стрелами и другим их концом с одной вертикальной конструкцией 18, расположенной в центре турбины 2 и вращающейся вместе со стрелами 3. Вторая система расположена в плоскости вращения турбины 2 и составлена из вторых стяжек 19, соединенных одним концом со стрелами 3, а другим концом с центральным вращающимся валом 16, с которым соединены стрелы 3. В то время как первая система стяжек поддерживает вес стрел 3, вторая система содействует противодействию тяге тросов 4 в ходе действия ветряной системы. Технические знания, необходимые для выполнения такого устройства, аналогичны используемым для выполнения обычных стягивающих конструкций.
Второе устройство 5b, подобное показанному на фиг.3 и 4, состоит в упоре стрел 3 турбины 2 в основание при помощи демпфирующих тележек 20, которые работают как упругая опора. Каждая опорная система 5b, соответствующая второму устройству, таким образом, снабжена, например, парой выровненных относительно друг друга колес 21 с осями вращения, проходящими через центр вращения турбины 2, для генерирования исключительно тангенциальных сил в ходе действия ветряной системы. Сопряжение между тележкой 20 и стрелой 3 турбины 2 выполнено при помощи упругого средства, выполненного, например, как пружина, соединенная параллельно с демпфером 22. Если принято второе устройство, турбина 2 должна быть снабжена опорной системой 5b вблизи каждой стрелы 3.
Возвращающее устройство 6, вместо этого, представляет собой компонент ветряной турбины 2, используемый для возвращения змейковых аэростатов 1 в исходное состояние. Каждое устройство 6 возвращения содержит, по меньшей мере, одну цилиндрическую трубу 6а, расположенную на конце соответствующей стрелы 3 и надлежащим образом наклоненную для минимизации сопротивления тросам 4 в ходе действия ветряной системы. В частности, если направление вращения турбины 2 всегда неизменно, каждое возвращающее устройство 6 отклонено вверх относительно горизонтальной плоскости (как показано, например, на фиг.5) и относительно вертикальной плоскости таким образом, чтобы сопровождать тросы 4 к змейковым аэростатам 1 (как показано, например, на фиг.6). Выходная кромка цилиндрической трубы 6а устройства 6, предпочтительно, закруглена для облегчения прохождения змейкового аэростата 1 в ходе его возвращения и запуска. Предпочтительно, расположенная в каждой цилиндрической трубе 6а стрела 3 снабжена системой 7 для возвращения и запуска змейкового аэростата 1 и сопровождения тросов 4. Очевидно, что ветряная турбина 2 может быть снабжена устройством 6 возвращения вблизи каждой стрелы 3.
Система 7 возвращения и запуска змейковых аэростатов 1 является компонентом ветряной турбины 2, при помощи которого возвращение и запуск змейкового аэростата 1 осуществляются, соответственно, после остановки и запуска ветряной системы. Каждая система 7 возвращения и запуска снабжена, например, по меньшей мере, одной тележкой 23, соединенной с двумя направляющими 24, которые направляют ее для скольжения внутри соответствующей цилиндрической трубы 6а устройства 6 и параллельно оси такого устройства. На тележке 23 установлена пара шкивов 25 для выпуска тросов 4. Как в ходе работы ветряной системы, так и в состоянии покоя, тележка 23 находится в конце ее хода. В частности, в рабочих условиях тележка 23 находится на внешнем конце устройства 6, в условиях состояния покоя тележка 23 находится на дальнем конце этого же элемента. Тележка 23 приводится в действие, например, по меньшей мере, одним ремнем, предпочтительно, зубчатого типа, который приводится редукторным электродвигателем (не показан). Такая тяга происходит при запуске и остановке ветряной системы для возвращения и запуска змейкового аэростата 1. При возвращении змейкового аэростата 1, когда змейковый аэростат 1 находится вблизи стрелы 3 турбины 2, один из двух тросов 4 натягивается для наклонения змейкового аэростата 1 и расположения его параллельно оси устройства 6 возвращения и содействия его вхождению в такой элемент. Редукторный электродвигатель, соединенный с предполагаемыми зубчатыми ремнями, приводится в действие, и тележка 23 опускается в устройство 6, допуская поступательное возвращение змейкового аэростата 1.
При запуске змейкового аэростата 1 или группы змейковых аэростатов 1 можно применять устройство создания искусственного ветра (не показано), которое, например, создает искусственный воздушный поток, который толкает змейковый аэростат 1 наружу. Также, в таком случае, тележка 23, приводимая в движение ремнями, следует за змейковым аэростатом 1 при его движении внутрь устройства 6. Ветряная турбина 2 может быть снабжена системой 7 возвращения и запуска змейкового аэростата 1, расположенной вблизи каждого устройства 6.
Система передачи представляет собой компонент турбины 2, который направляет тросы 4 между устройством 6 змейковых аэростатов 1 и системой 9 аккумулирования энергии. В предпочтительном варианте ее выполнения, который показан на фиг.8, система передачи содержит шкивы, установленные на стрелах 3 турбины 2. Шкивы вращаются вокруг осей и вставлены между двумя поверхностями, соединенными вблизи осей и головки. Каждая стрела 3 турбины 1 снабжена системой передачи, в которой применены два комплекта шкивов, по одному для каждого из двух тросов 4, которыми приводится в действие змейковый аэростат 1. Такие шкивы с чередованием расположены с их головкой, ориентированной вверх и вниз. Это приводит к тому, что трос 4 имеет вид ломаной линии вдоль стрел 3 турбины 2. Шкивы в каждой системе передачи могут быть подразделены на четыре категории:
первые шкивы 25, установленные на тележке системы возвращения и запуска змейкового аэростата 1;
вторые шкивы 26, прикрепленные и установленные прямо на стрелах 3 турбины 2;
третьи шкивы 27, составляющие часть систем 8 натяжения тросов 4;
четвертые шкивы 28, установленные на ползунах направляющих модулей 14 для тросов 4 (по одному для каждого ползуна).
Ветряная турбина 2 может быть снабжена системой передачи для каждой стрелы 3, и общее количество шкивов, которые составляют систему передачи, очевидно, зависит от длины стрел 3.
Система 8 натяжения и демпфирования тросов 4 является компонентом ветряной турбины 2, который удерживает тросы 4 в натянутом состоянии вдоль стрел 3 турбины 2 также в условиях состояния покоя и содействует смягчению внезапных изменений нагрузки, которые тросы 4 не способны поглотить. В возможном варианте ее выполнения, который показан, в частности, на фиг.8, система 8 натяжения составлена, по меньшей мере, из одной пары третьих шкивов 27, соединенных, по меньшей мере, с одним демпфирующим противовесом 29, подвешенным над землей и способным вертикально перемещаться, будучи направляемым соответствующей направляющей. На каждом из двух третьих шкивов 27 намотан один из двух тросов 4, которые управляют одним змейковым аэростатом 1, в результате чего натяжение тросов 4 держит противовес 29 в поднятом состоянии. Благодаря действию силы тяжести противовес 29 имеет тенденцию тянуть к земле пару тросов 4, создавая дополнительную нагрузку на них. Эффект является двойным, поскольку, во-первых, тросы 4 всегда поддерживаются натянутыми, также когда ветряная система находится в состоянии покоя; во-вторых, такие системы 8 натяжения содействуют демпфированию внезапных изменений нагрузки определенной величины.
Когда происходит порыв ветра, внезапное увеличение нагрузки частично поглощается удлинением тросов 4 и частично подъемом противовесов систем 8 натяжения. Наоборот, если нагрузка уменьшается, тросы 4 сокращаются, и противовесы 29 опускаются, частично компенсируя возможную задержку, с которой система управления с искусственным интеллектом вмешивается в процесс для устранения проблемы уменьшения натяжения. Важно то, что пара третьих шкивов 27 каждой системы 8 натяжения соединена с одним противовесом 29. Если бы каждый шкив 27 был соединен с отдельным противовесом, управляемость змейковых аэростатов 1 системой управления с искусственным интеллектом была бы ухудшена. Для управления группой змейковых аэростатов 1 система управления фактически оперирует относительной разностью длин пары тросов 4. Если бы шкивы 27 каждой системы 8 натяжения были соединены с различными противовесами, такая относительная разность больше не зависела бы исключительно от системы управления с искусственным интеллектом, но также зависела и от снижения противовеса, взаимодействующего с тросом 4, относительно другого противовеса, взаимодействующего с другим тросом 4 из одной пары тросов 4.
В альтернативном варианте ее конструкции, который показан, в частности, на фиг.9, система 8 натяжения и демпфирования снабжена, по меньшей мере, одним устройством 30, содержащим пару пятых шкивов 31, соединенных на конце тяги 32, шарнирно соединенной другим ее концом со стрелой 3 ветряной турбины 2. Такая тяга 32 взаимодействует со стрелой 3 турбины 2 посредством промежуточного упругого средства, предпочтительно, выполненного как, по меньшей мере, одна демпфирующая пружина 33, сжимается эффектом натяжения тросов 4. Подобно тому, что описано для системы 8, снабженной противовесом 29, этот вариант системы 8 удерживает тросы 4 в натянутом состоянии и компенсирует внезапные изменения нагрузки посредством удлинения сжатой пружины 33. Ветряная турбина 2 может быть снабжена множеством систем 8 натяжения для каждой стрелы 3, что зависит от ее длины.
Как можно видеть на фиг.10, возможная система 9 аккумулирования гравитационной энергии представляет собой компонент турбины 2, расположенный перед стрелами 3 и после системы 10 наматывания и разматывания тросов 4. Турбина может быть снабжена системой 9 аккумулирования вблизи каждой стрелы 3. Функции, выполняемые системами 9 аккумулирования энергии, состоят в получении запаса энергии для последующей компенсации высоких изменений нагрузки, для которой недостаточна компенсация при помощи эластичности тросов 4 и систем 8 натяжения. Со ссылками, в частности, на фиг.11, можно отметить, что в предпочтительном варианте ее выполнения система 9 составлена, по меньшей мере, из двух понижающих скорость шкивов 34а и 34b и, по меньшей мере, одного противовеса 35, поднятого от земли и способного перемещаться вертикально, предпочтительно, будучи соединенным с соответствующими направляющими. Тросы 4, которыми змейковый аэростат 1 приводится в действие, намотаны на такие шкивы 34а и 34b таким образом, что именно натяжение таких тросов 4 удерживает противовес 35 в поднятом состоянии. В ходе работы ветряной системы противовес 35 может находиться в положении между двумя предельными высотами. В частности, противовес 35 находится на минимальной высоте (как показано, например, на фиг.10, 11 и 12), если тяга пары тросов 4 меньше, чем предельное значение, в зависимости от веса противовеса 35 и количества шкивов, составляющих систему 9 аккумулирования энергии. Наоборот, противовес 35 находится на максимальной высоте, если тяга тросов 4 больше, чем такое предельное значение. Система 9 аккумулирования энергии, таким образом, имеет только два устойчивых состояния: на минимальной высоте и на максимальной высоте. Все другие промежуточные положения представляют собой переход между одним состоянием и другим, отдавая энергию, если противовес 35 опускается, и накапливая энергию, если противовес 35 поднимается. Шкивы 34а и 34b системы аккумулирования расположены на двух уровнях, то есть верхнем и нижнем. Вблизи каждого уровня шкивы 34а и 34b расположены рядом друг с другом, и их оси вращения перпендикулярны стреле 3 турбины 2. Шкивы 34а на верхнем уровне соединены со стрелой 3 турбины 2; шкивы 34b на нижнем уровне, вместо этого, соединены с противовесом 35. Так как каждый змейковый аэростат 1 приводится в действие посредством пары тросов 4, с функциональной точки зрения можно разделить систему шкивов 34а и 34b каждой системы 9 аккумулирования на две подсистемы. Каждый из двух тросов 4 поочередно намотан вокруг шкива на верхнем уровне 34а и шкива на нижнем уровне 34b. После некоторого количества витков, которое зависит от количества шкивов 34а и 34b, которыми снабжена система 9 аккумулирования, каждый из двух тросов 4 выходит из этой системы, переходя в систему 10 наматывания и разматывания тросов. В ходе работы ветряной турбины 2 каждый противовес 35 удерживается на его максимальной высоте благодаря нагрузке соответствующей пары тросов 4. В ходе рабочего цикла, когда змейковые аэростаты приводятся в действие так, чтобы они не противодействовали вращению стрелы, с которой они соединены, нагрузка троса намного ниже, чем та, которая удерживается в ходе предыдущих этапов, отличающихся высоким эффектом тяги. Уменьшение нагрузки троса 4 вызывает снижение противовеса 35 для компенсации такого уменьшения и удерживает тросы 4 в натянутом состоянии. Когда она возвращается к этапам, отличающимся высоким эффектом тяги, система управления с искусственным интеллектом блокирует, на некоторый период времени, первые лебедки 11 системы 10 разматывания и наматывания таким образом, что противовес 35 снова поднимается благодаря нагрузке тросов, таким образом, накапливая потенциальную гравитационную энергию. Система должна иметь такие размеры, чтобы снижение натяжения, которое происходит в ходе этапа недостаточного эффекта тяги при рабочем цикле, полностью компенсировалось посредством снижения противовеса 35 без потребности во вмешательстве системы 10 наматывания и разматывания тросов 4. Подобно тому, что было указано для систем 8 натяжения, важно, что две подсистемы шкивов 34а и 34b каждой системы 9 аккумулирования энергии соединены с одним противовесом 35. Если бы фактически каждая подсистема шкивов 34а и 34b была присоединена к другому противовесу, управляемость змейковых аэростатов 1 системой управления с искусственным интеллектом могла бы нарушаться.
В предпочтительном варианте ее выполнения, который не показан, система 9 аккумулирования энергии, вместо этого, может быть выполнена как гидравлический аккумулятор. В таком случае, таким образом накопленная энергия больше не представляет собой потенциальную гравитационную энергию, а представляет собой энергию сжатия и декомпрессии газа. Ветряная турбина 2 снабжена системой 9 аккумулирования перед каждой стрелой 3. Очевидно, что такие системы являются неотъемлемой частью стрел 3.
Как можно видеть, в частности, на фиг.12, система 10 наматывания и разматывания тросов 4 представляет собой компонент турбины 2, расположенный между системой 9 накопления энергии и системой 12 хранения тросов. Каждая стрела 3 ветряной турбины 2 снабжена одной из этих систем 10, каждая из которых содержит, в предпочтительном варианте ее выполнения, пару первых лебедок 11, на которые намотана пара тросов 4 соответствующего змейкового аэростата 1. Эти первые лебедки 11 соединены при помощи пары редукторов с парой первых электродвигателей 36, приведение в действие которых осуществляется системой управления с искусственным интеллектом. При помощи этих первых лебедок 11 осуществляется приведение в действие змейкового аэростата 1.
Каждый трос 4, выходя от понижающих скорость шкивов 34а системы 9 аккумулирования энергии, наматывается вокруг первой соответствующей лебедки 11 системы 10 наматывания и разматывания, предпочтительно, выполняя только ограниченное число витков (например, пару или, так или иначе, такое количество, что образуется один слой витков), после чего он продолжает движение к системе 12 хранения. Фактически, системы 10 наматывания и разматывания представляют собой системы, которые поддерживают всю тягу троса.
Различие между системой 10 наматывания и разматывания и системой 12 хранения тросов 4 делается необходимым большой длиной секций тросов 4, соединенных с группами змейковых аэростатов 1. Если бы, фактически, была одна лебедка для каждого троса 4, трос был бы полностью намотан вокруг барабана лебедки, формируя много слоев и в то же время удерживая большие нагрузки. Такая ситуация должна быть исключена, так как трение, которое может возникать из-за скольжения между разными витками, будет вызывать износ троса 4 в этой точке, ухудшающий его механические свойства.
В альтернативном варианте система 10 наматывания и разматывания тросов может содержать, например, адекватное количество устройств 37, подобных показанным на фиг.13, каждое из которых снабжено парой обращенных друг к другу гусениц 38, между которыми вставлен трос 4. Односторонние элементы, составляющие гусеницы, прижимаются друг к другу поршнями 39, например, пневматического типа, и на каждом из них установлена фасонная резиновая подушка. В устройствах этого типа тросы 4 сопровождаются к змейковым аэростатам 1 вращением гусениц 38. Хранение тросов 4 осуществляется, например, перед парой гусениц при помощи лебедок, на которых, однако, натяжение тросов минимально.
В другом ее альтернативном варианте, который показан, в частности, на фиг.14, система 10 наматывания и разматывания может быть составлена из четырех лебедок 40 для каждого троса 4. Такие лебедки 40 расположены на двух уровнях (две на верхнем уровне и две на нижнем уровне) и имеют параллельные оси вращения. Каждый трос 4 в среднем обернут на каждой из этих лебедок 40 примерно на протяжении трех четвертых окружности. Так как применены четыре лебедки 40 для каждого троса 4, суммарная намотка троса 4 на лебедках 40 в представленной системе эквивалентна трем полным виткам троса 4 на одной лебедке 40. Система с четырьмя лебедками 40, таким образом, способна удерживать нагрузку троса 4 подобно первому из двух описанных выше вариантов. Трение между каждой лебедкой 40 и тросом 4 может дополнительно увеличиваться из-за соответственного конфигурирования поверхности лебедок 40 для расположения троса 4, увеличивая контактную поверхность между тросом 4 и лебедкой 40.
Можно обеспечить разную шероховатость поверхности четырех лебедок для прогрессивного увеличения трения между тросом 4 и лебедкой 40 при прохождении к системам 12 хранения. Преимущество использования четырех лебедок 40 вместо одной состоит в том, что таким образом нет риска наложения витков троса. В системе 10, снабженной одной первой лебедкой 11 для каждого троса 4, когда барабан лебедки вращается, трос 4 имеет тенденцию продвигаться к верхней поверхности первой лебедки 11 (в зависимости от направления вращения). Необходимо, чтобы трос 4 скользил на поверхности барабана, в противном случае, за счет продвижения, он мог бы сходить с первой лебедки 11. Однако благодаря эффекту такого скольжения существует риск того, что последовательные витки троса 4 будут перекрываться. Такое не может происходить в системах, снабженных четырьмя лебедками 40 для каждого троса 4, поскольку практически на каждой лебедке 40 трос 4 не делает даже одного полного витка.
Ветряная турбина 2 может быть снабжена системой 10 наматывания и разматывания тросов 4 перед каждой стрелой 3. Очевидно, что такие системы являются неотъемлемой частью стрел 3.
Система 12 хранения тросов 4 является компонентом ветряной турбины 2, который содержит запас тросов 4 для змейковых аэростатов 1.
Подобно системам 10 наматывания и разматывания тросов 4, каждая стрела 3 ветряной турбины 2 снабжена одной из этих систем 12, каждая из которых содержит, в предпочтительном варианте ее выполнения, который показан на фиг.12, по меньшей мере, одну пару вторых лебедок 13, вокруг которых намотана пара тросов 4 соответствующего змейкового аэростата 1. Эти вторые лебедки 13 соединены при помощи пары редукторов с соответствующей парой вторых электродвигателей 41, приведение в действие которых управляется системой управления с искусственным интеллектом.
Как указано выше, системы 12 хранения также не участвуют в управлении змейковыми аэростатами 1. Таким образом, натяжение тросов 4, намотанных вокруг вторых лебедок 13 системы 12 хранения, значительно меньше, чем натяжение, которое может существовать в секциях троса 4, обернутых на первых лебедках 11 системы 10 наматывания и разматывания. Таким образом, где нагрузка тросов 4 наибольшая, количество витков на барабанах первых лебедок 11 таково, что тросы 4 никогда не располагаются двумя или более слоями. Наоборот, на вторых лебедках 13 систем 12 хранения тросы 4 намотаны многими слоями, но их натяжение минимально. Диаметр барабанов вторых лебедок 13, составляющих систему 12 хранения, больше диаметра барабанов первых лебедок 11 системы 10 наматывания и разматывания для, таким образом, минимизирования количества слоев намотки.
Очевидно, что целью системы с искусственным интеллектом управления является синхронизация вращения первых лебедок 11 системы 10 наматывания и разматывания тросов 4 и вторых лебедок 13 системы 12 хранения, вокруг которых намотан один трос 4. Фундаментальным является регулирование нагрузки на секцию троса 4, включенную между первой и второй лебедками 11 и 13, соответственно, прежде всего, в ходе этапов запуска и остановки ветряной турбины.
Поскольку на вторых лебедках 13 системы 12 хранения тросов 4 витки уложены многими слоями, вблизи каждой второй лебедки 13 необходимо располагать направляющий модуль 14, который направляет трос 4 для упорядоченного наматывания на вторую лебедку 13 и предотвращает скольжение между тросом 4 и поверхностями второй лебедки 13 и между самими витками. Ветряная турбина 2 снабжена системой 12 хранения перед каждой стрелой 3. Очевидно, что такие системы являются единым целым со стрелами 3.
Направляющий модуль 14 для тросов 4 является компонентом ветряной турбины 2, который направляет тросы 4 для упорядоченной намотки на вторую лебедку 13 соответствующей системы 12 хранения, что предотвращает скольжение между тросами 4 и поверхностями вторых лебедок 13 и между самими тросами 4.
В предпочтительном варианте его выполнения, который показан на фиг.10, направляющий модуль 14 снабжен ползуном 42, соединенным с направляющей, расположенной параллельно оси вращения второй лебедки 13. Ползун 42 способен поступательно перемещаться в двух направлениях, и на нем установлен четвертый шкив 28. В частности, такой ползун 42 движется при каждом этапе вращения второй лебедки 13. Согласно скользящему механизму, который определяет перемещение направляющей 42, можно, например, различать два типа линейных модулей, приспособленных для такой цели: приводимый винтом и приводимый ремнем. В приводимых винтом модулях поступательное перемещение ползуна 42 приводится в действие вращением шариковой винтовой передачи. В линейных приводимых ремнем модулях ползун 42 соединен с зубчатым ремнем.
В направляющих модулях 14 для тросов поступательное перемещение ползуна осуществляются вместе с вращением второй лебедки 13 посредством третьего электродвигателя 43, работой которого управляет система управления с искусственным интеллектом, которая приводит в действие змейковые аэростаты 1.
В ветряной турбине 2 применяют пару направляющих модулей 14 для тросов вблизи каждой стрелы 3, по одному для каждой второй лебедки 13 систем 12 хранения.
В качестве альтернативы использованию направляющих модулей 14 для тросов можно, например, размещать каждую вторую лебедку 13 систем 12 хранения для тросов 4 на каретке 44, которая поступательно перемещается по направляющей 45, расположенной параллельно оси вращения соответствующей второй лебедки 13, как показано, например, в альтернативном варианте конструкции на фиг.15. Скольжение каретки 44 приводится в действие скользящим механизмом вместе с вращением второй лебедки 13, приводимой в действие, возможно, с применением, по меньшей мере, одного промежуточного планетарного редуктора при помощи электродвигателя, действие которого управляется системой управления с искусственным интеллектом. Благодаря этому устройству направляющий модуль 14 для тросов больше не требуется, так как теперь вторая лебедка 13 совершает возвратно-поступательное движение для обеспечения упорядоченной намотки троса 4.
Ветряная турбина 2 также снабжена электродвигателями, которые также работают как генераторы, и генераторами, которые также работают как электродвигатели.
Электродвигатели представляют собой компоненты турбины, при помощи которых происходит приведение в действие первых и вторых лебедок 11 и 13 и направляющих модулей 14 для тросов. В частности, для каждого троса 4 турбина 2 снабжена тремя электродвигателями:
первый электродвигатель 36, осуществляющий вращение первой лебедки 11 системы 10 наматывания и разматывания троса 4;
второй электродвигатель 41, осуществляющий вращение второй лебедки 13 системы 12 хранения троса 4;
третий электродвигатель 43, осуществляющий поступательное перемещение ползуна 42 направляющего модуля 14 для троса 4 или каретки 44, на которой установлена вторая лебедка 13 системы 12 хранения тросов 4.
Каждый из электродвигателей 36, 41, 43 может быть соединен с соответствующей лебедкой или направляющим модулем для тросов при помощи редуктора, например, планетарного типа.
Поскольку электродвигатели 36, 41, 43 могут работать также как генераторы, можно производить электроэнергию при помощи первых электродвигателей 36 с использованием тяги, создаваемой змейковыми аэростатами 1 на первых лебедках 11 системы 10 наматывания и разматывания тросов 4. Такая сила тяги, фактически, вместо того, чтобы противодействовать ей, может использоваться для приведения в действие первых электродвигателей 36, работающих как генераторы, при помощи вращения первых лебедок 11. Способ, при помощи которого производится энергия согласно этому режиму работы, например, подобен тому, который описан в Европейском патенте 1672214, принадлежащем Sequoia Automation S.R.L., указанном выше.
Электродвигатели приводятся в действие системой управления с искусственным интеллектом, и те, которые соответствуют одному тросу 4 змейковых аэростатов 1, безусловно, должны работать синхронно.
Генераторы/электродвигатели 15а или 15b представляют собой компоненты турбины 2, при помощи которых происходит выработка электроэнергии. Их приведение в действие происходит благодаря вращению стрел 3 в ходе работы турбины 2. Относительно генерирования электроэнергии можно принять два устройства, которые отличаются тем, что генераторы расположены в турбине.
Более простое устройство состоит в размещении генераторов 15а в центре турбины 2. В частности, можно использовать три варианта:
выполнение единой системы генерирования с использованием в качестве ротора центрального вала 16, к которому прикреплены стрелы 3 турбины 2, и в качестве статора части, прикрепленной к центру турбины 2; можно предполагать размещение постоянных магнитов на роторе (так как они не требуют какого-либо питания) и снабжения статора обмотками генерирующей цепи;
использование одного генератора, ротор которого приводится в действие вращением центрального вала 16 посредством сопряжения с пригодным мультипликатором для увеличения входной скорости вращения;
приведение в действие многих генераторов при помощи системы зубчатых передач, отличающихся зубчатым колесом, которое зацепляется со многими шестернями, по одной для каждого генератора, с функцией умножения и тяги для многих систем генерирования.
Конструкция, альтернативная размещению генератора 15а в центре ветряной турбины 2, может применяться, только если стрелы 3 турбины 2 опираются на основание при помощи демпфирующих тележек 20, которые действуют как упругая опора. В таком случае, генераторы 15b могут быть расположены непосредственно вблизи демпфирующих тележек 20 и могут приводиться в действие вращением колес 21. Например, можно предусматривать снабжение каждой тележки 20 четырьмя генераторами 15b, по два для каждого колеса 21, расположенного на каждой части. Если это устройство принято, необходимо снабдить конструкцию коллектором для передачи электрической энергии от вращательной части ветряной турбины 2 к неподвижной части.
Эта конструкция обеспечивает следующие преимущества относительно предыдущих:
посредством надлежащего задания размеров диаметра колес 21 тележек 20 и расстояния от колес 21 до центра ветряной турбины 2 угловая скорость вращения колес становится больше, чем скорость турбины 2; это очевидно представляет собой преимущество относительно определения размеров генераторов 15b для генерирования электроэнергии;
если генераторы 15b установлены на демпфирующих тележках 20, жесткость, требуемая для стрел 3 турбины 2, уменьшается, так как движущий вращающий момент разгружается вблизи точки, где он произведен, и, таким образом, изгибающийся вращающий момент на стрелах 3 уменьшается, при этом меньшая жесткость позволяет получать меньший вес стрел 3 и, таким образом, меньшее рассеивание энергии из-за инерции (при запуске) и, прежде всего, более низкие производственные затраты для получения конструкции.
В ветряной турбине 2, к которой относится настоящее изобретение, генераторы/электродвигатели 15а или 15b также работают как электродвигатели, так как они задают вращение стрел 3 при запуске для облегчения подъема змейковых аэростатов 1.
Кроме того, генераторы/электродвигатели 15а или 15b приводятся в действие системой управления с искусственным интеллектом, и ветряная турбина 2 может быть снабжена разным количеством генераторов/электродвигателей 15а или 15b, также согласно тому факту, что они установлены на опорной системе стрел 5b или помещены в центре турбины 2.
Система управления с искусственным интеллектом представляет собой систему, при помощи которой змейковые аэростаты 1 автоматически приводятся в действие. Главная задача этого компонента состоит, среди прочего, в автоматическом контроле и управлении полетом каждого змейкового аэростата 1 посредством управления работой электродвигателей, от которых зависит вращение первых и вторых лебедок 11 и 13 соответственно систем 10 наматывания и разматывания тросов 4 и систем 12 хранения. Очевидно, что каждый змейковый аэростат 1 приводится в действие независимо от других, но, так или иначе, исключая возможность возникновения взаимных помех в ходе полета.
Автоматическое управление полетом одного змейкового аэростата 1, осуществляемое системой управления с искусственным интеллектом, выполняется при помощи прогнозирующих алгоритмов управления, осуществляемых обрабатывающим средством самой системы управления с искусственным интеллектом, при помощи которой змейковый аэростат 1 управляется с целью исключения колебаний, неустойчивости управления и локальных предельных значений тяги. Траектория, проходимая змейковыми аэростатами 1, прогнозируется для оптимизации энергии, производимой в ходе рабочего цикла, с максимальной безопасностью, с максимальным соблюдением динамических технических требований и уменьшением времени, необходимого для перехода от текущего положения к прогнозируемому.
Автоматическое управление одним змейковым аэростатом 1 происходит посредством процесса в реальном масштабе времени, который получает и обрабатывает информацию, поступающую от набора наземных датчиков и на борт змейкового аэростата 1. На борту змейкового аэростата 1 предварительная обработка данных, полученных набором датчиков, может быть необходимой для того, чтобы не перегружать радиосвязь. Входные данные относятся к пространственному положению змейкового аэростата 1, к ускорениям, к силам (например, нагрузке троса, определенной путем считывания крутящих моментов электродвигателя) и к геометрически определенным величинам. Процесс обрабатывает такие входные данные при помощи прогнозирующих алгоритмов и производит выходной сигнал, который приводит в действие электродвигатели 36 и 41, соединенные с первыми лебедками 11 и 13.
Обработка входных данных требует временного интервала, который является пропорциональным длительности анализа данных. Благодаря минимизации продолжительности такого интервала задержка, с которой змейковый аэростат 1 приводится в действие, уменьшается. По этой причине существует тенденция приоритета краткосрочного анализа. Однако краткосрочный анализ может не обеспечивать осуществление прогноза траектории с оптимальным вертикальным годографом. Таким образом, важно отдать приоритет оптимальному компромиссному решению, таким образом, чтобы обработка данных происходила в короткое время, но достаточное для прогнозирования оптимальной длины траектории. Так или иначе, следует предположить, что прогнозирование более длинной траектории, описываемой в ходе рабочего цикла, бесполезно.
Прогнозирующий алгоритм определяет в каждый момент оптимальное положение, в котором должен находиться змейковый аэростат 1 в последующие моменты, при помощи надлежащих параметров полета и управления (высоты полета, динамики противовеса, данных тяги, вычислений для безопасности относительно запрещенных областей (ситуация со структурным натяжением, неустойчивостью или чрезмерными силами), момента, когда должен осуществляться привод). В каждый момент времени координаты оптимального положения (называемого параметром), в котором должен находиться змейковый аэростат 1 в такой определенный момент, соответствуют каждому параметру. Каждый параметр также назначен относительно веса, установка которого происходит в каждый момент посредством системы обратной связи, которая корректирует веса самых критических параметров для того, чтобы делать решения о таких параметрах более важными. После отбора лучших координат для каждого параметра получают векторную сумму для каждого момента времени, который рассматривается при прогнозе. Наконец, после введения результатов временного взвешивания, которые дают приоритет краткосрочным стратегиям, вычисляются оптимальные координаты для каждого момента времени.
После прогнозирования координат идеальных положений, которые змейковый аэростат 1 должен занять в последующие моменты времени, процесс в реальном масштабе времени определяет лучшую траекторию, по которой должен двигаться змейковый аэростат 1 для достижения этих положений. Алгоритм, используемый для такой цели, использует уравнения для полета, инерции змейкового аэростата и процентного соотношения реакции, которую он может иметь в зависимости от дифференциала тяги на тросах 4, для определения принципа управления змейковым аэростатом. При помощи соответствующих способов управления привод регулируется для контроля колебаний и рисков чрезмерных усилий вследствие инерции, эластичности кинематической цепи и задержек измерения.
Управление вращением первых и вторых лебедок 11 и 13, соответственно, не представляет собой единственную функцию, выполняемую системой управления с искусственным интеллектом. Такая система фактически содержит также подсистему самокалибровки, которая выполняет процедуру самокалибровки набора датчиков на борту змейковых аэростатов 1.
Датчики, установленные на змейковых аэростатах 1, фактически имеют фабричную предварительную калибровку, и потребность в самокалибровке происходит от восприимчивости таких датчиков к действию некоторых внешних переменных, которые суммируются для изменения соответствия измеренных величин относительно реальности. Среди внешних переменных существуют следующие:
точность установки датчиков на змейковом аэростате 1 (который является гибким основанием);
ухудшение калибровки со временем;
изменения температур (которые могут смещать коррекцию датчика).
Изменения положения в пространстве не могут быть отнесены к внешним переменным, действие которых должно компенсироваться, так как они относятся к выходным точно измеренным переменным.
Изменения магнитных и электромагнитных полей и временные прерывания привязки к земле считаются временными возмущениями.
Способы выполнения самокалибровки датчика по существу базируются на уровне избыточности, который датчики прямого действия способны обеспечить для системы. Кроме того, система управления с искусственным интеллектом имеет всю доступную информацию, которая поступает от ветряной системы в целом, например, об углах, формируемых тросами, и конфигурации сил, измеренных в конструкциях.
В дополнение к мгновенной избыточности, выдаваемой датчиками прямого действия во взаимодействии с располагаемыми средствами измерения, можно использовать периодическую избыточность на основе проверки калибровки при работе этой же ветряной системы. Когда система работает, датчики перемещаются вместе со змейковым аэростатом 1 в пространстве. Относительно декартовской системы отсчета каждого датчика вектор ускорения силы тяжести и вектор магнитного поля Земли изменяют направление и значение, но сохраняют их абсолютную величину. Так как векторный модуль задается векторной суммой трех компонентов, измеренных каждым датчиком, можно создать системы уравнений, из которых можно получить относительную ошибку, которая зависит от положения. При помощи соответствующих математических методов погрешность можно вводить в контур обратной связи и воздействовать на параметры приращения и смещения для каждой оси.
Также можно предусматривать взаимодействия между по существу известными датчиками ускорения и магнитометрическими датчиками благодаря тому факту, что благодаря его природе и в зависимости от выбранного местонахождения для установки ветряной системы магнитное поле Земли имеет постоянный наклон относительно направления ускорения силы тяжести. Угол, включенный между двумя векторами, тогда можно считать управляющей переменной относительно самокалибровки системы в целом.
Что касается использования магнитометров, необходимо помнить, что фабричная калибровка таких инструментов, конечно, неадекватна для действия в местонахождении назначения, так как магнитное поле Земли имеет изменяющийся угол падения в зависимости от географического места и морфологии территории, связанной с ее геологией. Перекалибровка магнитометра, таким образом, становится обязательной на первом этапе запуска системы.
Посредством поддержания процедуры самокалибровки всегда в активном состоянии можно использовать ее также как диагностическую систему. В таком случае, однако, необходимо обязательно предусмотреть ловушки, которые в случае временных возмущений предотвращают принятие прошлой калибровки как недействительной.
Процедура самокалибровки должна быть способна приводить как можно быстрее к хорошей калибровке, однако исключая повреждение предварительно достигнутых результатов. С этой целью могут использоваться методы оценки статистики, накопления и дисперсии ошибок, при помощи которых также может создаваться база данных калибровки, к которой можно обращаться для снижения вероятности погрешности подсистемы самокалибровки.
Описанная система должна быть способна работать без взаимных помех с нормальным действием ветряной системы. Такой принцип, однако, не может быть соблюден относительно первоначального запуска системы, так как еще не существует доступных баз данных, которые достаточны для обеспечения адекватной надежности самокалибровки. Это начальное ограничение можно преодолеть, задавая для змейковых аэростатов 1 ограниченных геометрических траекторий и исключая использование всех степеней свободы системы. Такие траектории по сути более безопасны, так как они выбраны с расчетом на датчики абсолютного отсчета, такие как акселерометры, фабричная предварительная калибровка которых считается достоверной для запуска системы. Степени свободы при перемещении в воздушном пространстве ограничены, пока алгоритм самокалибровки не сойдется. Этот этап требует относительно короткого периода времени в пределах секунд. Каждый полный рабочий цикл ветряной системы содействует уточнению калибровки. После некоторого количества циклов систему можно рассматривать как находящуюся в установившемся состоянии с точки зрения оптимизации самокалибровки, но в ходе действия ветряной системы самокалибровка так или иначе сохраняется активной как фоновая функция.
Система управления с искусственным интеллектом также содержит подсистему безопасности, которая также вмешивается в управление змейковыми аэростатами 1, предотвращая столкновения между такими змейковыми аэростатами 1 и, возможно, самолетами или летающими объектами, которые находятся в воздушном пространстве для ветряной системы, соответствующей изобретению.
Ветряная система фактически занимает воздушное пространство, которое может пересекаться другими объектами, которые способны лететь в небе, такими как самолеты и птицы. Прежде всего, подобно тому, как это происходит для других типов промышленных установок, например таких, как атомные станции, таким образом, предусматривается резервирование воздушного пространства для ветряной системы, а именно, площади соответствующих размеров, где полеты запрещаются.
Такая предосторожность, однако, недостаточна для предотвращения столкновения между змейковыми аэростатами 1 и летящими объектами, так как необходимо также принимать во внимание непредвиденные или аварийные ситуации. В частности, среди летающих объектов, которые могут "вторгаться" в район запрещения полетов, могут быть следующие:
самолеты, которые сбились с маршрута, но снабжены средствами идентификации, которые могут быть дистанционно запрошены;
самолеты, которые вследствие их устройства не имеют возможности связываться или быть идентифицированными, или знать, где может быть встречено препятствие при полете, представленное змейковыми аэростатами 1 системы;
стаи или отдельные птицы.
Змейковые аэростаты 1 летят, будучи соединенными с ветряной турбиной 2, с тремя степенями свободы: два направляющих косинуса биссектрисы тросов 4 относительно плоскости вращения ветряной турбины 2 и длина самих тросов 4. Эти три степени свободы допускают достаточную автономию управления для принятия процедуры исключения столкновений с возможными самолетами, которые должны пересечь воздушное пространство ветряной системы.
Действие этой подсистемы основано на искусственном видении воздушного пространства ветряной системы и смежного воздушного пространства, которое является достаточно широким для обеспечения своевременной реакции на самолеты, приближающиеся с высокой скоростью. Ветряная система, соответствующая настоящему изобретению, таким образом, может содержать систему искусственного видения, например, оптического или микроволнового типа, взаимодействующую с подсистемой безопасности. Как правило, классический радар представляет собой сканирующий луч, в то время как микроволновое видение производит изображения подобно устройствам, которые предусматривают использование оптических камер.
От системы искусственного видения вся полезная информация для определения траектории пересечения между самолетом и воздушным пространством, зарезервированным для ветряной системы, может быть получена или выведена при помощи соответствующего математического процесса. Очевидно, что такая траектория может быть однозначно определена и также является переменной во времени (самолет может быть полностью управляемым, в свою очередь, в попытке избежать столкновения). По этой причине невозможно назначить каждому приближающемуся самолету четко определенный коридор, но можно назначить непрерывно обновляемый гиперболический конус вероятности траектории. Для построения такого конуса, в случае с большими, быстролетящими и идентифицируемыми самолетами, необходимо знать их динамические характеристики и иметь доступность для системы управления к базе данных, с которой можно взаимодействовать после запроса приближающегося самолета. Гиперболический конус строят в пространстве и времени таким образом, чтобы ввести змейковые аэростаты 1 в назначенное запретное пространство, которое может быть занято ими, с целью избегания змейковыми аэростатами 1 области, идентифицированной тем же конусом, если бы они летали вокруг него.
Гиперболический конус имеет очень переменные характеристики, формы и размеры в зависимости от типа самолета, скорости подлета и его управляемости. Чем больше самолет способен управляться резко, тем шире выходная кромка конуса; чем более скоростными и менее управляемыми являются самолеты, тем более узкой, более обозримой и описанной является кромка.
Подсистема безопасности, которая осуществляет создание гиперболического конуса, передает каждому блоку управления змейковыми аэростатами 1 координаты, которые указывают запретную область с максимальным приоритетом относительно всех параметров оптимизации траектории полета змейкового аэростата 1. В зависимости от текущих положений каждый блок управления имеет различные элементы информации, в зависимости от текущего положения и времени, вычисленных при прохождении каждого змейкового аэростата 1 в районе пересечения между воздушным пространством ветряной системы и гиперболическим конусом. Подсистема вычисляет скорость подлета самолета и отмечает положение, которое ветряная система примет в этот момент. Запрещенный район, таким образом, формируется пересечением, и его геометрия непрерывно обновляется, так же как информация, выдаваемая для каждого блока управления. Запрещенный район может наблюдаться с переменным коэффициентом безопасности. Если змейковый аэростат должен использоваться в запрещенном районе с оптимальным расположением относительно такого района и относительно прогнозированного момента столкновения, система позволяет его прохождение. На уровне управления для получения возможности организации алгоритмом безопасного места необходимо восстановить место с большим упреждением относительно реального возникновения событий таким образом, чтобы иметь способность достаточного предвидения поведения в будущем и достаточно заранее программировать безопасные маневры.
Система искусственного видения, задача которой состоит в управлении предотвращением столкновения, имеет тот же отвес, предназначенный для исполнения функций избыточности измерения положения змейковых аэростатов 1 в воздушном пространстве для генерирования энергии. Выходной сигнал оптической системы становится, таким образом, от растрового до геометрического, обеспечивая, при помощи пригодных математических методов, полностью известные векторы (направления, знака, вращения). Радары сканируют с достаточной скоростью для получения точных прогнозов. С использованием искусственного видения существует преимущество способности распознавания некоторых параметров при одном сканировании. Другие полезные элементы информации для алгоритма обработки гиперболического конуса вероятности траектории и маршрута самолета представляют собой положения змейковых аэростатов 1 и идентификатор типа самолета, который может быть получен в цифровой форме для заданных самолетов или быть эвристическим для птиц и самолетов, которые не могут быть каталогизированы.
В аварийном случае основное назначение ветряной системы, а именно, производство электрической энергии, получает приоритет второй или третьей очереди. Во-первых, подсистема безопасности будет пытаться избегать столкновения; во-вторых, она будет вынуждена исключать создание критических условий для самой ветряной системы, таким образом, предохраняя и самолет, и ветряную турбину, и допуская запуск снова процесса преобразования энергии после аварийной ситуации.
В случае со стаями птиц или самолетами, полет которых не может быть прогнозируемым, подсистема безопасности увеличивает запасы управления змейковыми аэростатами 1, достигая характеристик фигурного полета, или создает для змейковых аэростатов 1 условия ограниченной навигационной скорости. Такие маневры становятся возможными благодаря очень малой инерции змейковых аэростатов 1, которые являются по существу сверхлегкими и снабжены очень большими силами управления. Сверхлегкое транспортное средство, снабженное очень большими силами управления, фактически может развивать ускорения, которые стремятся к бесконечности. Змейковые аэростаты 1 благодаря их высокой управляемости могут поддерживать скорость для простого удерживания в воздухе, таким образом, представляя более предсказуемое, менее быстрое препятствие, которое не производит нежелательных реакций пилотов или птиц.
Стая или одна птица, фактически, может, в свою очередь, реагировать при наблюдении змейковых аэростатов 1, так же как и пилот самолета. В таком случае целесообразна оценка для определения гиперболического конуса вероятности траектории и маршрута самолета вне зоны видимости. Ветряная система не должна создавать неудобств или дополнительных рисков.
Последний и крайний уровень аварийной ситуации приводит к высокоскоростному возвращению змейковых аэростатов 1 в стрелы 3 ветряной турбины 2. Системы быстрого возвращения могут быть осуществлены при помощи процедуры разматывания троса змейкового аэростата с использованием большой разности длины тросов, после чего следует быстрое наматывание. Змейковый аэростат 1 с размотанным тросом будет следовать осевой линии без подъемной силы, а именно, биссектрисе управляющих тросов 4.
В крайней ситуации ветряная система, соответствующая настоящему изобретению, может содержать систему (не показана) срезания тросов 4, которая, взаимодействуя с подсистемой безопасности, отвечает за прерывание линии тяги змейкового аэростата. Такое устройство может приводить к ликвидации и потере змейковых аэростатов 1, которые без осевого усилия становятся инертными телами. Эта ситуация управляется так называемым "сторожевым устройством", чье вмешательство следует при потере управляемости системой управления с искусственным интеллектом.
Как указано выше, система управления с искусственным интеллектом также отвечает за приведение в действие направляющих модулей 14 для тросов 4. Третьи электродвигатели 43, которые приводят в действие такие модули 14, приводятся в действие для соответственного соединения вращения барабанов вторых лебедок 13 с поступательным перемещением ползунов 42 направляющих модулей 14. Подобным образом, если ветряная система не снабжена направляющими модулями 14 для тросов 4, но снабжена тележками 44, на которых установлены вторые лебедки 13 системы 12 хранения тросов 4, электродвигатели, посредством которых эти каретки поступательно перемещаются, приводятся в действие системой управления с искусственным интеллектом.
Таким образом, посредством системы управления с искусственным интеллектом скорость и направление поступательного перемещения ползунов 42 или вторых лебедок 13 регулируются для обеспечения упорядоченного наматывания тросов 4 на вторые лебедки 13 и предотвращения скольжения между тросами 13 и поверхностями вторых лебедок 13 и между самими тросами 4.
Система управления с искусственным интеллектом также управляет действием генераторов/электродвигателей 15а или 15b. В частности, система вмешивается в работу после запуска ветряной турбины 2, приводя в действие электродвигатели для вращения стрел 3 и облегчения подъема змейковых аэростатов 1.
Система управления с искусственным интеллектом должна, наконец, распознавать и своевременно реагировать на непредвиденные события, такие как порывы ветра и потери нагрузки. В случае порывов ветра, если увеличение нагрузки полностью не компенсируется системами 8 натяжения и демпфирования тех же тросов 4, система управления вмешивается посредством уменьшения натяжения тросов 4 для исключения повреждения ветряной системы чрезмерной грузкой. Это происходит посредством приведения в действие первых лебедок 11 для получения возможности быстрого разматывания тросов 4. Внезапные уменьшения нагрузки должны исключаться, так как недостаточное натяжение тросов 4 вызывает падение змейкового аэростата 1 без возможности управления. В ходе стандартного рабочего цикла уменьшение нагрузки происходит вслед за этапом, когда эффект тяги недостаточен. Такое снижение натяжения, однако, предсказуемо, и, таким образом, системы 9 аккумулирования энергии приспособлены для обеспечения соответствующего натяжения тросов 4 в ходе этого этапа, не требуя вмешательства систем 10 наматывания и разматывания тросов 4. Если происходит внезапное уменьшение нагрузки, не связанное с этапом недостаточного эффекта тяги, если натяжные системы 8 не способны компенсировать падение нагрузки, система управления с искусственным интеллектом вмешивается в работу посредством быстрого наматывания тросов 4. Таким образом, управление группой змейковых аэростатов 1 восстанавливается.
Система энергоснабжения содержит все необходимые компоненты для накопления и подачи электрической энергии. В частности, ветряная турбина 2 снабжена источниками питания, трансформаторами и аккумуляторами, при помощи которых произведенная электроэнергия может храниться, ток может подаваться к электродвигателям в ходе этапа запуска турбины 2 и для возвращения змейковых аэростатов 1 посредством питания всех электронных компонентов, и электроэнергия может поставляться внешним пользователям. Действие всех электронных компонентов ветряной системы управляется системой управления с искусственным интеллектом.
Из вышеописанного ясно, что ветряная система, соответствующая настоящему изобретению, является ветряной турбиной с вертикальной осью, приводимой в действие посредством змейковых аэростатов, автоматически управляемых системой управления с искусственным интеллектом. Относительно того, что было предложено текущим уровнем техники, такая ветряная система предусматривает инновационный способ управления змейковыми аэростатами, поскольку нет никакого различия между приводными тросами и силовыми тросами, и обе такие функциональные возможности выполняются одной парой тросов 4 для каждого змейкового аэростата 1. В то время, как в существующих конструкциях существуют лебедки, которыми могут управляться змейковые аэростаты, и лебедки для возвращения змейкового аэростата и производства электроэнергии, в ветряной системе согласно настоящему изобретению первые лебедки 11 используются исключительно для управления змейковым аэростатом 1, и те же приводные тросы 4 намотаны на такие первые лебедки 11, обеспечивая преобразование энергии, обеспечивающей вращение стрел 3 турбины 2. Угол встречи с ветром и площадь фронта ветрового течения, пересекаемого змейковыми аэростатами 1, в этом случае регулируются посредством регулирования длины размотанных секций троса 4 для получения максимального отбора энергии.
Настоящее изобретение также относится к способу генерирования электрической энергии при помощи ветряной системы, подобной описанной выше.
В целом, способ, соответствующий настоящему изобретению, который содержит процесс преобразования энергии ветра в электрическую энергию при помощи ветряной системы, соответствующей настоящему изобретению, содержит четыре этапа, которые циклически повторяются в ходе действия ветряной системы. Со ссылками, как пример, на одну стрелу 3 турбины 2 в ходе первых трех этапов способа согласно настоящему изобретению вращение стрелы 3 происходит благодаря энергии ветра, отбираемой посредством змейковых аэростатов 1, соединенных с такой стрелой 3. Система управления с искусственным интеллектом, таким образом, управляет змейковым аэростатом 1, соединенным со стрелой 3, таким образом, чтобы энергия ветра, которую можно отбирать, была максимально совместима с необходимостью удерживания двух тросов 4 в максимально возможной степени перпендикулярно стреле 3 в ходе всего этапа. Фактически, чем более тангенциальны тросы 4 к дуге окружности, описываемой внешним концом стрелы 3, тем больше полезный компонент силы тяги для генерирования момента, который заставляет стрелу 3 вращаться. Тот факт, что тросы 4 удерживаются перпендикулярно стреле 3 турбины 2, подразумевает, что система управления приводит в действие змейковый аэростат 1 для, главным образом, использования подъемной силы, а именно, компонента силы, который перпендикулярен скорости ветра. Таким образом, змейковый аэростат 1 продвигается, скользя по поверхности фронта ветра. Ветер продвигает змейковый аэростат 1, натягивая тросы 4, соединенные со стрелой 3 турбины 2: это действие лобового сопротивления заставляет стрелу 3 вращаться и производит электрическую энергию посредством генераторов/электродвигателей 15а или 15b в зависимости от генераторов, приводимых таким вращением, при помощи возможного сопряжения с редукторами. Следует помнить, что стрелы 3 турбины 2 должны рассматриваться как составляющие часть одного жесткого тела, так как они соединены с единым вращающимся центральным валом 16. Это означает, что энергия ветра, располагаемая для преобразования в электроэнергию в данный момент рабочего цикла, образована суммой действия всех стрел 3.
Четвертый этап способа согласно настоящему изобретению вместо этого происходит в наветренном районе. Система управления с искусственным интеллектом приводит в действие змейковый аэростат 1 для быстрого пересечения такого района, не производя какого-либо тормозящего эффекта на стрелы 3 турбины 2. В частности, не только система управления с искусственным интеллектом направляет змейковый аэростат 1 для вращения стрелы 3, но в ходе такого этапа эффект тяги змейковыми аэростатами 1 все еще существует (даже если едва эффективно). Вращение рассматриваемой стрелы 3 в ходе такого этапа, таким образом, происходит, прежде всего, благодаря эффекту вращения стрел 3 турбины 2, которые находятся в других трех этапах, и, таким образом, благодаря энергии ветра, отбираемой посредством змейковых аэростатов 1, соединенных с другими стрелами 3.
Фиг.16 показывает потенциальную траекторию, описываемую в ходе стандартного рабочего цикла ветряной системы согласно настоящему изобретению, и предполагая, что направление W скорости ветра и направление вращения, обозначенное стрелкой R, турбины 2 сохраняются постоянными, сосредотачивая внимание на одной стреле 3 турбины, четыре этапа, составляющие способ согласно настоящему изобретению, соответственно, обозначенные при помощи заштрихованных блоков а, b, с, d, разграничивающих различные районы пространства, в которых находится змейковый аэростат 1 в зависимости от направления W ветрового течения, в которое он погружен, представляют собой следующие.
На этапе а змейковые аэростаты 1 проходят поперек относительно направления W ветра. Ветер, таким образом, дует поперек относительно направления продвижения змейкового аэростата. Длина размотанных секций тросов увеличивается, поскольку змейковые аэростаты 1 отходят от стрелы 3 турбины 2. В начале данного этапа эффект тяги змейкового аэростата 1 используется для подъема противовеса соответствующей системы 9 аккумулирования энергии, что происходит благодаря использованию самой нагрузки тросов 4 и предотвращает вращение вторых лебедок 13 системы 12 хранения тросов 4. Таким образом, накапливается потенциальная гравитационная энергия, которая будет возвращена в ходе следующего четвертого подветренного этапа, когда произойдет переворот азимута, для компенсации внезапного уменьшения нагрузки троса. В ходе этого этапа, таким образом, необходимо управлять траекторией полета змейкового аэростата 1, предпочтительно, при помощи системы управления с искусственным интеллектом, таким образом, чтобы змейковый аэростат 1 продолжал движение поперек относительно направления W ветра, при этом змейковый аэростат 1, таким образом, натягивает тросы 4, соединенные со стрелой 3 ветряной турбины 2, следовательно, вращая саму стрелу 3 благодаря эффекту тяги и уходя от стрелы 3 ветряной турбины 1, заставляя противовес 35 соответствующей системы 9 аккумулирования энергии подниматься.
На этапе b змейковый аэростат 1 проходит в том же направлении W, в котором дует ветер. В ходе данного этапа использование сопротивления змейкового аэростата 1 суммируется с использованием подъемной силы змейкового аэростата 1. Это делает скорость змейкового аэростата 1 большей, чем скорость ветра, и, для использования эффекта тяги необходимо частично наматывать тросы 4. Несмотря на такое возвращение, даже в ходе этого этапа, энергетический баланс положителен. В ходе такого этапа, таким образом, необходимо управлять траекторией полета змейкового аэростата так, чтобы он продолжал движение в том же направлении, в котором дует ветер, при этом змейковый аэростат 1, таким образом, натягивает тросы 4, соединенные со стрелой 3 ветряной турбины 2, вращая саму стрелу 3 благодаря его эффекту тяги, и так, чтобы змейковый аэростат 1 приближался к стреле 3 ветряной турбины 2 благодаря наматыванию тросов 4 при помощи первых лебедок 11 первых электродвигателей 36 без снижения противовеса 35 соответствующей системы 9 аккумулирования энергии.
На этапе с подобно тому, что происходит в ходе этапа а с поперечным ветром, змейковый аэростат 1 продолжает движение поперек относительно направления W ветра, и длина размотанных секций тросов 4 увеличивается, так как змейковый аэростат 1 уходит от стрелы 3 турбины 2. Разматывание в ходе такого этапа управляется системой управления с искусственным интеллектом для того, чтобы не допускать снижение противовеса 35 системы хранения тросов 4. Это позволяет сохранять потенциальную энергию для следующего этапа рабочего цикла. В ходе этого этапа, таким образом, необходимо управлять траекторией полета змейкового аэростата 1 так, чтобы он продолжал движение поперек относительно направления W ветра, натягивая тросы 4, соединенные со стрелой 3 ветряной турбины 2, и вращая саму стрелу 3 благодаря его эффекту тяги, и посредством отхода змейкового аэростата 1 от стрелы 3 ветряной турбины 2 благодаря разматыванию тросов 4 при помощи первых лебедок 11 посредством первых электродвигателей 36 без снижения противовеса 35 соответствующей системы 9 аккумулирования энергии.
На этапе d змейковый аэростат 1 продолжает движение в направлении, противоположном направлению ветра. Система управления с искусственным интеллектом управляет змейковым аэростатом 1 так, чтобы не создавать какого-либо тормозящего действия, так как осуществляется внезапный маневр, названный "переворотом азимута", который состоит в быстром переходе между этими двумя поперечными элементами, в ходе которого змейковый аэростат 1 проходит в воздухе расстояние, которое больше, по меньшей мере, в три раза нарушенной дуги окружности во время, когда турбина 2 движется по такой дуге. Змейковый аэростат 1 снижает его высоту, не противодействуя каким-либо образом вращению стрел 3 турбины 2. В ходе данного этапа необходимо возвращение, в относительно короткое время, длинной секции размотанного троса 4. Благодаря пригодным масштабам системы 9 аккумулирования энергии можно предусматривать компенсацию падения нагрузки тросов 4 и одновременное приведение в действие их возвращения, опуская противовес такой системы для того, чтобы не требовалось вмешательство системы управления с искусственным интеллектом, которая может содействовать возвращению, приводя в действие первые и вторые лебедки 11 и 13 соответственно системы 10 наматывания и разматывания тросов 4 и системы 12 хранения тросов 4.
В конце переворота азимута змейковый аэростат 1 располагается так, чтобы он был захвачен ветром и продолжал движение поперек относительно последнего. В ходе этого этапа, таким образом, необходимо управлять траекторией полета змейкового аэростата 1 так, чтобы он продолжал движение в противоположном направлении относительно направления ветра, не генерируя какого-либо тормозящего эффекта в отношении вращения стрелы 3 ветряной турбины 2, и чтобы змейковый аэростат 1 приближался к стреле 3 ветряной турбины 2, опуская противовес 35 соответствующей системы 9 аккумулирования энергии таким образом, чтобы змейковый аэростат 1 возвращался к положению, от которого он может продолжать движение поперек относительно направления W ветра.
На этапе е осуществляется повторение предыдущих этапов циклически для каждого полного оборота стрелы 3 ветряной турбины 2.
Согласно способу, соответствующему настоящему изобретению, таким образом, в ходе этапов с поперечным ветром змейковый аэростат 1 отходит от стрелы 3 турбины 2, наоборот, в ходе наветренного и подветренного этапов змейковые аэростаты 1 приближаются к стрелам 3 турбины 2, так как необходимо возвращение тросов 4. Так или иначе, следует отметить, что в ходе целого рабочего цикла, согласно настоящему способу, змейковые аэростаты 1 приводятся в действие для попеременного набора и снижения высоты. Этот выбор, прежде всего, вызван технической потребностью, поскольку стрелы 3 турбины 2 вращаются более медленно, чем змейковые аэростаты 1. Во-вторых, непрерывное чередование между набором и снижением высоты также чрезвычайно выгодно относительно оптимизации отбора энергии ветра. Фактически, благодаря скольжению по поверхности фронта ветра мощность, которую змейковые аэростаты способны развить, больше, как будет описано ниже более подробно.
Энергия, произведенная при разматывании тросов 4, больше, чем энергия, расходуемая для их наматывания. Энергетический баланс, таким образом, положителен. Благодаря использованию способа, соответствующего настоящему изобретению, и благодаря системе управления с искусственным интеллектом, которая, обрабатывая в реальном масштабе времени информацию, поступающую от набора датчиков, установленных на змейковых аэростатах 1, и набора наземных датчиков, может управлять змейковыми аэростатами 1 таким образом, чтобы они поднимались, главным образом, с использованием подъемной силы. Таким образом, траектория, которой следует каждый змейковый аэростат 1 в ходе каждого цикла способа, оптимальна в отношении энергии ветра, которая может быть отобрана, следуя траекториям для пересечения максимального объема воздуха. Способ, соответствующий настоящему изобретению, таким образом, обеспечивает не только непрерывность производства электроэнергии, но также и оптимизацию энергии, которая может быть получена в ходе каждого цикла с таким же размером змейкового аэростата, как в известных системах.
Как доказательство высокой эффективности, демонстрируемой ветряной системой и способом, соответствующим настоящему изобретению, можно привести некоторые замечания, относящиеся к энергии, которую единственный змейковый аэростат 1 способен извлечь из ветра.
С этой целью, с конкретными ссылками на фиг.17, ниже описана аэродинамика системы. Известно, что когда ветровое течение встречает неподвижную аэродинамическую поверхность (профиль крыла), такое течение производит две силы: силу D лобового сопротивления, параллельную направлению W, вдоль которого дует ветер, и подъемную силу L, перпендикулярную такому направлению. В случае с ламинарным потоком ветра ветровые течения AF1, проходящие над профилем AS, быстрее, чем течения AF2, проходящие под ним, так как они должны пройти большее расстояние. Это уменьшает давление на верхней части змейкового аэростата и, таким образом, градиент давления, который вызывает подъемную силу L.
Как показано на фиг.18, предположим, что змейковый аэростат AM может двигаться вдоль направления DT подъемной силы. Благодаря эффекту такого движения нижняя поверхность аэродинамического змейкового аэростата AM наклоняется относительно скорости ветра. В таком случае, подъемная сила и сила лобового сопротивления соответственно перпендикулярна и параллельна скорости набегающего потока относительно змейкового аэростата.
При обозначении ссылочной позицией S1 силы, параллельной направлению движения, и ссылочной позицией S2 силы, перпендикулярной такому направлению, компонент подъемной силы L, параллельный направлению движения, имеет такое же направление, как и поступательное перемещение аэродинамического змейкового аэростата AM, в то время как параллельный компонент силы D тяги имеет противоположное направление.
По этой причине для поддержания движения в перпендикулярном направлении относительно ветровых течений можно предусматривать наклон змейкового аэростата AM для получения высокого отношения между компонентом подъемной силы L в направлении DT движения змейкового аэростата AM относительно компонента силы D тяги.
Эти замечания также действительны для каждого одного змейкового аэростата 1 ветряной системы.
Система управления с искусственным интеллектом фактически приводит в действие каждый змейковый аэростат 1 для поддержания отношения между подъемной силой и силой лобового сопротивления на высоком уровне в ходе этапов, отличающихся высоким эффектом тяги змейковыми аэростатами 1. Таким образом, змейковые аэростаты 1 колеблются по фронту ветра и генерируют энергию благодаря тяге тросов 4.
Мощность, произведенная одним змейковым аэростатом 1, вычисляется посредством умножения удельной силы Р ветра на площадь А фронта ветра, пересекаемого змейковым аэростатом (а именно, площадь змейкового аэростата), и на коэффициент KPF мощности змейкового аэростата, коэффициент полезного действия в зависимости от отношения Vk/Vw между скоростью Vk змейкового аэростата и скоростью Vw ветра и два коэффициента Kd и Кl.
Коэффициент Kd относится к лобовому сопротивлению, а именно, когда змейковый аэростат натягивает связь с землей с силами и скоростью по направлению ветра, в то время как коэффициент Kl относится к подъемной силе, а именно, когда змейковый аэростат натягивает связь с землей, колеблясь и скользя по поверхности фронта ветра. Благодаря подъемной силе скорость змейкового аэростата существенно выше, чем скорость ветра. Мощность змейкового аэростата тем больше, чем больше подъемная сила относительно лобового сопротивления.
В качестве примера, предположим, что Vk/Vw=10, К1=1,2 и Кd=0,1. Таким образом, может быть получен KPF=20.
Предполагая, что плотность р воздуха постоянна и равна 1,225 кг/м3, удельная мощность, произведенная удельной энергией ветра, может определяться следующим образом:

Мощность, которая может быть произведена при помощи змейкового аэростата, выражена следующей формулой:
Мощность змейкового аэростата = Коэффициент мощности змейкового аэростата × Удельная энергия ветра × А
Если, например, использовался змейковый аэростат с поверхностью 18 м2, толкаемый со скоростью 60 м/сек ветром, дующим со скоростью 6 м/сек, мощность, которую можно будет произвести на уровне тросов, может составлять 47628 Вт. Такая мощность соответствовала бы, таким образом, максимальной мощности, которую змейковый аэростат способен произвести.
Величина, принятая коэффициентом мощности змейкового аэростата, так или иначе, зависит от эффективности змейкового аэростата. Можно создавать коэффициент мощности змейкового аэростата, принимающий величины больше 20. Если, например, коэффициент мощности змейкового аэростата принимает величину, равную 40, максимальная мощность, которая может быть достигнута змейковым аэростатом с площадью 18 м2, может составлять 95256 Вт.
Ветряная система, к которой относится настоящее изобретение, позволяет преобразовывать энергию ветра в электрическую энергию, поставляя мощность в порядке нескольких мегаватт. Однако благодаря высокой масштабируемости описанной системы можно легко выполнять некоторые модификации варианта конструкции для получения ветряной системы, которая способна производить мощности более высокого порядка, например, 1 гигаватт.
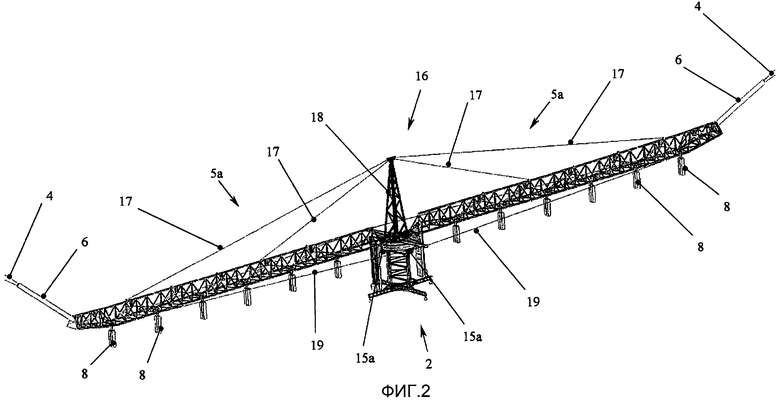





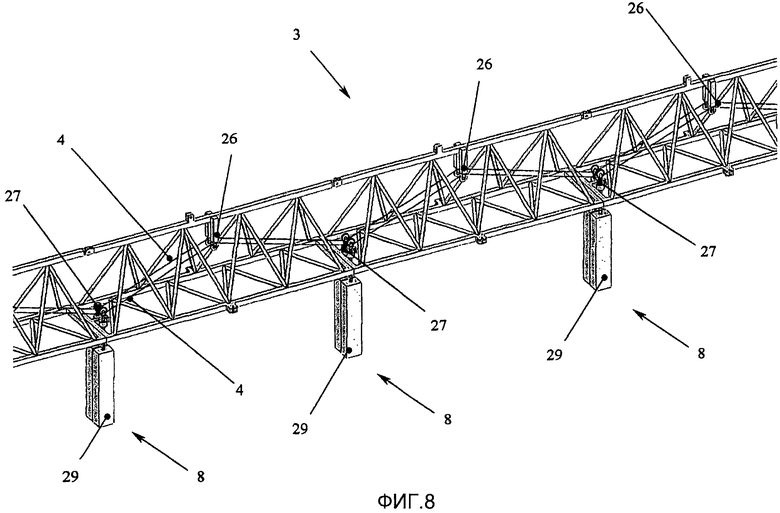

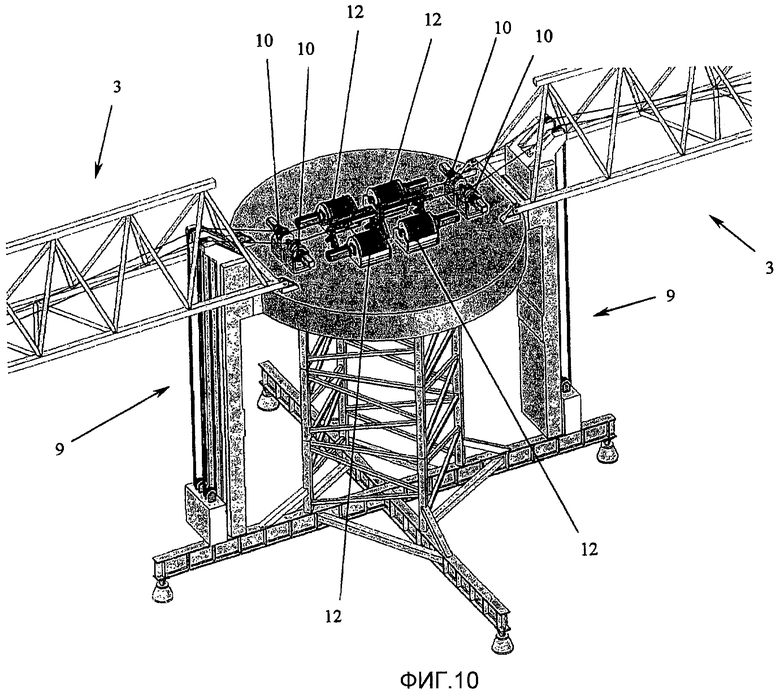
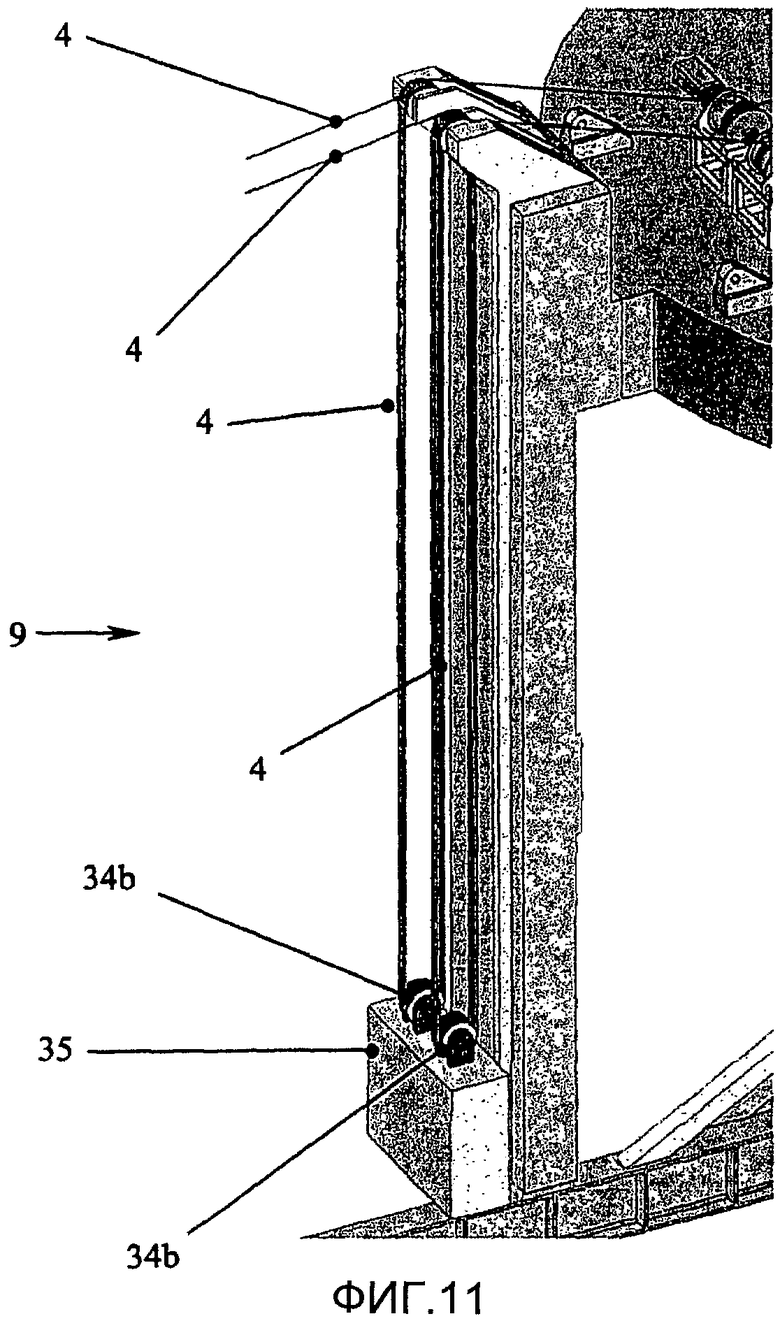


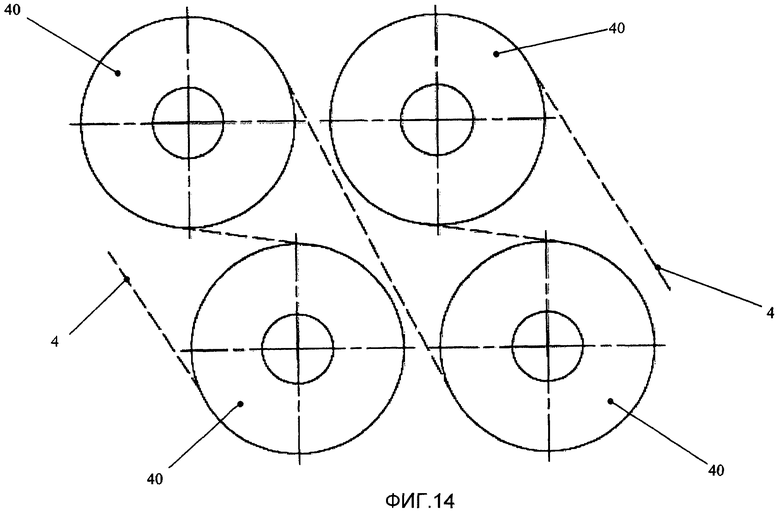



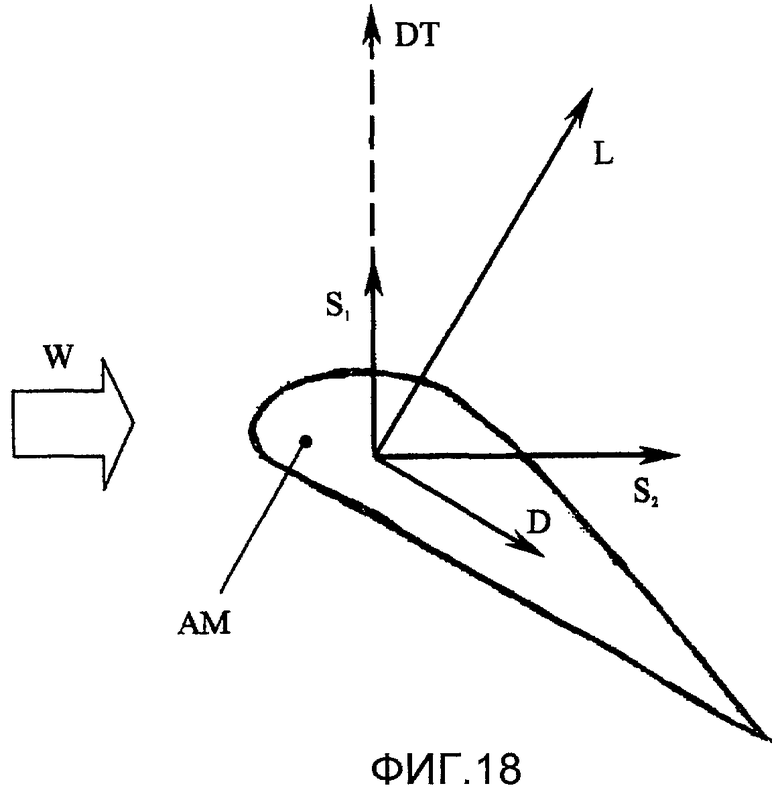
Изобретение относится к области ветроэнергетики. Способ производства электроэнергии при помощи ветряной системы, содержащей, по меньшей мере, один змейковый аэростат, управляемый с земли, расположенную на уровне земли ветряную турбину с вертикальной осью с, по меньшей мере, одной стрелой, соединенной при помощи двух тросов с змейковым аэростатом, приспособленным для приведения в действие при помощи турбины для вращения стрелы и преобразования энергии ветра в электрическую энергию при помощи, по меньшей мере, одной системы генератора/электродвигателя, работающей как генератор, который взаимодействует с турбиной, причем тросы приспособлены и для передачи механической энергии от змейковых аэростатов и к ним, и для управления траекторией полета змейковых аэростатов, содержит следующие этапы: а) управление траекторией полета аэростата путем его перемещения поперечно направлению ветрового потока, натягивая тросы, вращая стрелу, отводя его от стрелы и поднимая противовес системы накопления энергии; б) управление траекторией полета аэростата путем его перемещения в направлении ветрового потока, натягивая тросы, вращая стрелу, приближая к стреле аэростат благодаря наматыванию тросов, без снижения противовеса системы накопления энергии; в) управление траекторией полета аэростата путем его перемещения поперечно направлению ветрового потока, натягивая тросы, вращая стрелу, и отводя его от стрелы посредством разматывания тросов без снижения противовеса системы накопления энергии; г) управление траекторией полета аэростата путем его перемещения в противоположном ветровому потоку направлении, не создавая какого-либо тормозящего эффекта для вращения стрелы ветряной турбины, и приближения к стреле посредством снижения противовеса системы накопления энергии для приема аэростата в положении, начиная с которого он продолжает перемещение поперек относительно направления ветрового потока; д) повторение указанных этапов. Изобретение обеспечивает повышение мощности ветряной системы. 18 з.п. ф-лы, 18 ил.
1. Способ производства электроэнергии при помощи ветряной системы, содержащей, по меньшей мере, один змейковый аэростат (1), управляемый с земли, и погруженный в, по меньшей мере, одно ветровое течение W, ветряную турбину (2) с вертикальной осью, расположенную на уровне земли и снабженную, по меньшей мере, одной стрелой (3), соединенной при помощи двух тросов (4) с змейковым аэростатом (1), приспособленным для приведения в действие при помощи турбины (2) для вращения стрелы (3) и осуществления преобразования энергии ветра в электрическую энергию при помощи, по меньшей мере, одной системы (15а, 15b) генератора/электродвигателя, работающей как генератор и взаимодействующей с турбиной (2), причем тросы (4) приспособлены и для передачи механической энергии от змейковых аэростатов (1) и к ним, и для управления траекторией полета змейковых аэростатов (1), и систему управления с искусственным интеллектом, приспособленную для автоматического управления змейковыми аэростатами (1) на траектории полета и снабженную набором датчиков, расположенных на змейковых аэростатах (1) и набором наземных датчиков, при этом способ содержит следующие этапы:
а) управление траекторией полета змейкового аэростата (1) таким образом, что змейковый аэростат (1) перемещается поперечно относительно направления ветрового течения W, натягивая тросы (4), соединенные со стрелой (3) ветряной турбины (2), и вращая стрелу (3) благодаря эффекту тяги, и отходит от стрелы (3), поднимая противовес (35) системы (9) накопления энергии;
б) управление траекторией полета змейкового аэростата (1) таким образом, что змейковый аэростат (1) перемещается в направлении ветрового течения W, натягивая тросы (4), соединенные со стрелой (3), и вращая стрелу (3) благодаря эффекту тяги, и приближается к стреле (3) благодаря наматыванию тросов (4) на первые лебедки (11) при помощи первых электродвигателей (36) без снижения противовеса (35) системы (9) накопления энергии;
в) управление траекторией полета змейкового аэростата (1) таким образом, что змейковый аэростат (1) перемещается поперечно относительно направления ветрового течения W, натягивая тросы (4), соединенные со стрелой (3), и вращая стрелу (3) благодаря эффекту тяги, и отходит от стрелы (3) посредством разматывания тросов (4) через первые лебедки (11) при помощи первых электродвигателей (36) без снижения противовеса (35) системы (9) накопления энергии;
г) управление траекторией полета змейкового аэростата (1) таким образом, что змейковый аэростат (1) перемещается в противоположном направлении относительно направления ветрового течения W, не создавая какого-либо тормозящего эффекта для вращения стрелы (3) ветряной турбины (2), и приближается к стреле (3) посредством снижения противовеса (35) системы (9) накопления энергии для приема змейкового аэростата (1) в положении, начиная с которого он продолжает перемещение поперечно относительно направления ветрового течения;
д) повторение указанных этапов.
2. Способ по п.1, в котором ветряная система содержит систему энергоснабжения, взаимодействующую с системой управления с искусственным интеллектом для управления аккумулированием или подачей энергии.
3. Способ по п.1, в котором набор датчиков, расположенных на змейковых аэростатах (1), посылает информацию в беспроводном режиме системе управления с искусственным интеллектом.
4. Способ по п.1, в котором каждая стрела (3) ветряной турбины (2) поддерживается при помощи, по меньшей мере, одной опорной системы (5а, 5b), при этом опорная система (5а) предпочтительно содержит стяжки (17), соединенные одним концом со стрелой (3) и другим концом - с единой вертикальной конструкцией (18), расположенной в центре турбины (2), и вращающиеся со стрелой (3), причем опорная система (5а) предпочтительно содержит стяжки (19), расположенные в плоскости вращения ветряной турбины (2), соединенные одним концом со стрелами (3) и другим концом - с центральным вращающимся валом (16) турбины (2), при этом опорная система (5b) предпочтительно также содержит, по меньшей мере, одну демпфирующую тележку (20), посредством которой стрела (3) может упруго опираться на землю, при этом опорная система (5b) предпочтительно снабжена упругим средством, соединенным параллельно, по меньшей мере, с одним демпфером (22), и демпфирующая тележка (20) снабжена, по меньшей мере, одной парой колес (21), совмещенных с осями вращения, проходящими через центр вращения турбины (2).
5. Способ по п.1, в котором стрела (3) ветряной турбины (2) содержит, по меньшей мере, одно возвращающее устройство (6), приспособленное для возвращения змейкового аэростата (1) в состоянии покоя и предпочтительно содержащее, по меньшей мере, одну цилиндрическую трубу (6а), предпочтительно снабженную закругленной выходной кромкой, причем возвращающее устройство (6) предпочтительно наклонено относительно стрелы (3).
6. Способ по п.5, в котором стрела (3) ветряной турбины (2) содержит, по меньшей мере, одну систему (7) возвращения и запуска змейкового аэростата (1), предпочтительно расположенную внутри возвращающего устройства (6) и предпочтительно содержащую, по меньшей мере, одну тележку (23), скользящую по, по меньшей мере, двум направляющим (24) внутри цилиндрической трубы (6а) возвращающего устройства (6) и предпочтительно, приводящую в действие, по меньшей мере, приводимым редукторным электродвигателем, при этом система (7) возвращения и запуска предпочтительно снабжена устройством создания искусственной тяги ветра, приспособленным для создания искусственного воздушного потока при запуске змейкового аэростата (1) из устройства (6) возвращения.
7. Способ по п.1, в котором стрела (3) ветряной турбины (2) содержит систему (8) натяжения и демпфирования тросов (4), предпочтительно снабженную, по меньшей мере, одним демпфируемым противовесом (29), поднятым от земли вследствие натяжения тросов (4) и способным совершать поступательное вертикальное движение, при этом система (8) натяжения и демпфирования предпочтительно снабжена, по меньшей мере, одним устройством (30), содержащим тягу (32), шарнирно подсоединенную вблизи конца стрелы (3) и взаимодействующую со стрелой (3) с расположением между ними упругого средства, предпочтительно представляющего собой, по меньшей мере, одну демпфирующую пружину (33).
8. Способ по п.7, в котором система (8) натяжения и демпфирования тросов (4) представляет собой гидравлический аккумулятор.
9. Способ по п.1, в котором стрела (3) ветряной турбины (2) содержит систему (9) накопления потенциальной гравитационной энергии, предпочтительно содержащую, по меньшей мере, два понижающих скорость шкива (34а, 34b) и, по меньшей мере, один противовес (35), поднятый от земли вследствие натяжения тросов и способный совершать поступательное вертикальное движение, при этом тросы (4) намотаны вокруг понижающих скорость шкивов (34а, 34b), уменьшающие скорость шкивы (34а, 34b) предпочтительно расположены соответственно на нижнем уровне и на верхнем уровне и предпочтительно соединены на верхнем уровне со стрелой (3) и на нижнем уровне соединены с противовесом (35).
10. Способ по п.9, в котором каждый трос (4) с чередованием обернут вокруг одного из понижающих скорость шкивов (34а) на верхнем уровне и одним из понижающих скорость шкивов (34b) на нижнем уровне.
11. Способ по п.1, в котором стрела (3) ветряной турбины (2) содержит систему (10) наматывания и разматывания тросов (4), предпочтительно содержащую, по меньшей мере, две первые лебедки (11), на каждой из которых соответствующий трос (4) наматывается и разматывается, причем каждая из первых лебедок (11) соединена с первым электродвигателем (36), управляемым системой управления с искусственным интеллектом, при этом первый электродвигатель (36) предпочтительно представляет собой электрический генератор, причем вокруг каждой из первых лебедок (11) соответствующий трос (4) намотан посредством выполнения ограниченного количества витков таким образом, что получают один слой витков.
12. Способ по п.11, в котором система (10) наматывания и разматывания тросов (4) содержит, по меньшей мере, две пары обращенных друг к другу гусениц (38), выдвигаемых поршнями (39), причем между каждыми двумя из них вставлен один трос (4).
13. Способ по п.11, в котором стрела (3) ветряной турбины (2) содержит, по меньшей мере, одну систему (12) хранения тросов (4), предпочтительно содержащую, по меньшей мере, две вторые лебедки (13), на каждой из которых соответствующий один трос (4) наматывается или разматывается, причем каждая из вторых лебедок (13) соединена со вторым электродвигателем (41), управляемым системой управления с искусственным интеллектом, при этом вторая лебедка (13) предпочтительно соединена со вторым электродвигателем (41) с расположением между ними, по меньшей мере, одного планетарного редуктора и предпочтительно снабжена направляющим модулем (14), приспособленным для направления троса (4) для упорядоченного наматывания на вторую лебедку (13), причем вторая лебедка (13) предпочтительно установлена на тележке (44), скользящей по направляющей (45) параллельно оси вращения второй лебедки (13), при этом скольжение тележки (44) по направляющей (45) предпочтительно управляется скользящим механизмом вместе с вращением второй лебедки (13), предпочтительно приводимым в действие электродвигателем, управляемым системой управления с искусственным интеллектом, при этом скользящий механизм предпочтительно соединен с электродвигателем с расположением между ними, по меньшей мере, одного планетарного редуктора.
14. Способ по п.13, в котором стрела (3) ветряной турбины (2) дополнительно содержит систему передачи, приспособленную для направления тросов (4) к змейковому аэростату (1) и предпочтительно содержащую, по меньшей мере, одну пару первых шкивов (25), установленных на тележке (23) системы (7) возвращения и запуска змейковых аэростатов (1), вторые неподвижные шкивы (26), установленные на стреле (3), по меньшей мере, одну пару третьих шкивов (27) для каждой системы (8) натяжения и демпфирования тросов (4), по меньшей мере, одну пару четвертых шкивов (28), установленных на ползунах (42) направляющих модулей (14) для тросов (4), при этом ползун (42) предпочтительно приспособлен для скольжения по направляющей параллельно оси вращения второй лебедки (13) системы (12) хранения, причем скольжение ползуна (42) по направляющей предпочтительно управляется скользящим механизмом вместе с вращением второй лебедки (13), при этом скользящий механизм предпочтительно приводится в действие третьим электродвигателем (43), управляемым системой управления с искусственным интеллектом, и предпочтительно представляет собой механизм с винтовым приводом или с ременным приводом.
15. Способ по п.1, в котором система (15а, 15b) генератора/электродвигателя приводится в действие вращением стрел (3) ветряной турбины (2), когда она работает как генератор, и управляется системой управления с искусственным интеллектом, когда она работает как электродвигатель, причем система (15а) генератора/электродвигателя предпочтительно содержит систему зубчатых передач, отличающуюся шестернями, приспособленными для умножения и тяги множества генераторов.
16. Способ по п.4, в котором система (15b) генератора/электродвигателя расположена на демпфирующих тележках (20) и приводится в действие вращением указанных колес (21), причем система (15b) генератора/электродвигателя предпочтительно соединена с колесами (21) с расположением между ними, по меньшей мере, одного планетарного редуктора, при этом передача электрической энергии от системы (15b) генератора/электродвигателя к неподвижной части ветряной турбины (2) предпочтительно осуществляется при помощи коллектора, расположенного в центре или вблизи направляющих.
17. Способ по п.13, в котором система управления с искусственным интеллектом приспособлена для управления первыми и вторыми лебедками (11, 13) системы (10) наматывания и разматывания тросов (4) и системой (12) хранения тросов (4) для управления змейковым аэростатом (1) на траектории полета при помощи обрабатывающего средства, выполняя, по меньшей мере, один прогнозирующий алгоритм, определяющий в каждый момент оптимальное положение, которое змейковые аэростаты (1) должны занять, по меньшей мере, в один следующий момент в зависимости от параметров полета и управления, информации, посланной от набора датчиков, расположенных на змейковых аэростатах (1), и от набора наземных датчиков, отдавая приоритет подъемной силе L, производимой ветровым течением.
18. Способ по п.1, в котором система управления с искусственным интеллектом содержит подсистему безопасности, вмешивающуюся в управление змейковыми аэростатами (1) для предотвращения столкновений в полете и предпочтительно приспособленную для взаимодействия с системой искусственного видения, представляющей собой систему оптического типа или микроволнового типа, при этом система обеспечения безопасности предпочтительно приспособлена для взаимодействия с системой срезания тросов, предпочтительно приспособленную для управления при помощи "сторожевого устройства".
19. Способ по п.1, в котором этапы а) и/или б), и/или в), и/или г), и/или д) выполняются автоматически при помощи системы управления с искусственным интеллектом.
| Устройство для измерения расстояния до поверхности | 1988 |
|
SU1672214A1 |
| Ветроэлектрическая установка | 1981 |
|
SU1275114A1 |
| Ветроустановка | 1984 |
|
SU1225913A1 |
| US 6254034 B1, 03.07.2001. | |||

