Изобретение относится к контролю безопасности подземных трубопроводов и может быть использовано для предотвращения установки врезок в трубу, боеприпасов для ее подрыва, имитаторов утечек перекачиваемого продукта для дезинформации службы безопасности, обнаружения утечек продукта.
Известен способ обнаружения изменения параметров среды в окружении заглубленного магистрального трубопровода [1]. Согласно способу в выбранном сечении трубы возбуждают прозванивающие импульсы, регистрируют их на удалении от сечения возбуждения, проводят накопление зарегистрированных импульсов в очередном цикле последовательно принимаемых решений, формируют эталоны сигналов при проведении земляных работ и принимают решение по результатам сравнения накопленных сигналов с эталонами.
Недостатком способа является высокая трудоемкость создания ситуаций для построения эталонов на действующем трубопроводе. Построенные эталоны не отражают действительное состояние трубопровода при изменении погодных условий, режима перекачки продукта и необходимо их часто корректировать.
Известен способ охраны подземных трубопроводов, реализованный в системе «PipeGuard» израильской компании «Magal» [2]. Согласно способу формируется база данных сейсмических сигналов (эталонов), характерных при проведении земляных работ по доступу к подземному трубопроводу, и по степени сходства регистрируемых сигналов с эталонными принимается решение о ведущихся работах (или их отсутствии) на объекте охраны. Сигналы от движения людей, транспорта, атмосферных осадков относят к классу помех.
Недостатками способа являются повышенный уровень ложных решений, обусловленный не использованием информации о наличии людей в охранной зоне, применением не адаптированных порогов принятия решений.
Известен способ, реализованный в системе «Secure Pipe» австралийской компании «Future Fibre Technologies», основанный на обнаружении микронапряжений в паре параллельных одномодовых волокон оптического кабеля. При вибрациях потоки излучений в волокнах проходят разные пути до регистратора и по формирующейся интерференционной картине судят о наличии источника вибраций в полосе прокладки этого кабеля. Недостатком способа является невысокая надежность обнаружения (Введенский Б. Системы охраны периметров - новинки сезона 2006 г. // Системы безопасности, 2006, №4), обусловленная регистрацией любых вибраций, включая и сигналов от корней деревьев и опорных вышек высоковольтных линий. Принципы фильтрации сигналов и принятия решений реализуются на процессоре стоимостью 100 тыс. долл. и являются «ноу-хау» компании.
Известен способ, реализованный в системе «FP6100-Х» американской фирмы Optellios, основанный на обнаружении действий, связанных с попытками доступа к заглубленному трубопроводу, таких как работа экскаваторов, вскрытие грунта ручными инструментами и т.д. В качестве сенсора используют отдельные жилы одномодового кабеля [3]. В силу отсутствия алгоритмов фильтрации полезных сигналов на фоне сопутствующих шумов надежность обнаружения земляных работ в зоне трубопровода по способу не может быть приемлемой для потребителя. По данным [4] «… вопрос эффективности подземного применения волоконных охранных систем еще требует своего решения».
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому является способ, предложенный в патенте на полезную модель №73992 «Маскируемая система мониторинга состояния подземных магистральных трубопроводов», МПК G08B 13/22, опубл. 10.06.2008. Согласно использованному в системе способу регистрируют сигналы от движущихся людей и проводимых земляных работ на обе стороны от трубопровода, проводят их анализ и принимают решение по результатам анализа. Недостатком способа является недостаточная надежность обнаружения проводимых работ ввиду отсутствия механизма адаптации порогов принятия решений к непрерывно меняющимся физическим характеристикам контролируемого пространства.
Задачей изобретения является повышение надежности обнаружения несанкционированных работ по доступу к подземному трубопроводу независимо от изменения физических параметров, характеризующих охранную зону, по которой он проложен.
Поставленная задача достигается тем, что в способе обнаружения несанкционированных работ по доступу к подземному трубопроводу, включающем регистрацию упругих колебаний в почвогрунтах по обе стороны от трубопровода и их сравнение с эталонными уровнями, согласно изобретению регистрируемые колебания суммируют, в суммарном сигнале определяют составляющие от шагов нарушителей с определением численности нарушителей и определяют минимально возможное время доступа к подземному трубопроводу группой нарушителей установленной численности, формируют огибающие энергии и плотности переходов через нуль суммарного сигнала и при превышении ими эталонных уровней в течение упомянутого минимально возможного времени доступа к подземному трубопроводу формируют сигнал на контролируемом участке и передают его по телекоммуникационным каналам в службу безопасности.
При этом в качестве эталонных уровней огибающих энергии и плотности переходов через нуль суммарного сигнала принимают значения огибающих энергии и плотности, регистрируемых при появлении в суммарном сигнале составляющих от шагов нарушителей. Наличие в суммарном сигнале составляющих от шагов нарушителей устанавливают по превышению нормированной взаимокорреляционной функцией этого сигнала с эталонными сигналами тех ее значений, которые наблюдались в момент включения имитатора сигналов шагов нарушителей при разных скоростях их передвижения.
Численность нарушителей определяют по числу почти периодических последовательностей импульсов в суммарном сигнале, а минимально возможное время доступа нарушителей к подземному трубопроводу определяют в зависимости от числа обнаруженных нарушителей, состояния грунта и метеоусловий. При этом в способе формируют оценки текущей плотности распределения вероятностей упомянутой взаимокорреляционной функции и по очередным ее значениям после включения имитатора сигналов шагов нарушителей определяют вероятность ложных решений по обнаружению проведения несанкционированных работ по доступу к подземному трубопроводу в ближайшем цикле обнаружения, значение которой по телекоммуникационным каналам передают в службу безопасности, а также проводят сравнение количества сгенерированных в суммарном сигнале импульсных последовательностей с обнаруженными, результат сравнения по телекоммуникационным каналам передают в службу безопасности и по нему судят о состоянии помехоустойчивости обнаружения проведения несанкционированных работ по доступу к подземному трубопроводу в текущей обстановке у контролируемого подземного трубопровода. Кроме того, формируют имитатором упругие колебания, отражающие процесс ведения земляных работ, а за эталонные уровни огибающих энергии и плотности переходов через нуль суммарного сигнала принимают текущие значения этих функций в момент установления минимально возможного времени доступа к подземному трубопроводу до включения упомянутого имитатора. Для регистрации упругих колебаний используют точечные детекторы упругих колебаний, при этом в почвогрунтах их прикрепляют к металлическим полоскам, устанавливаемым параллельно подземному трубопроводу.
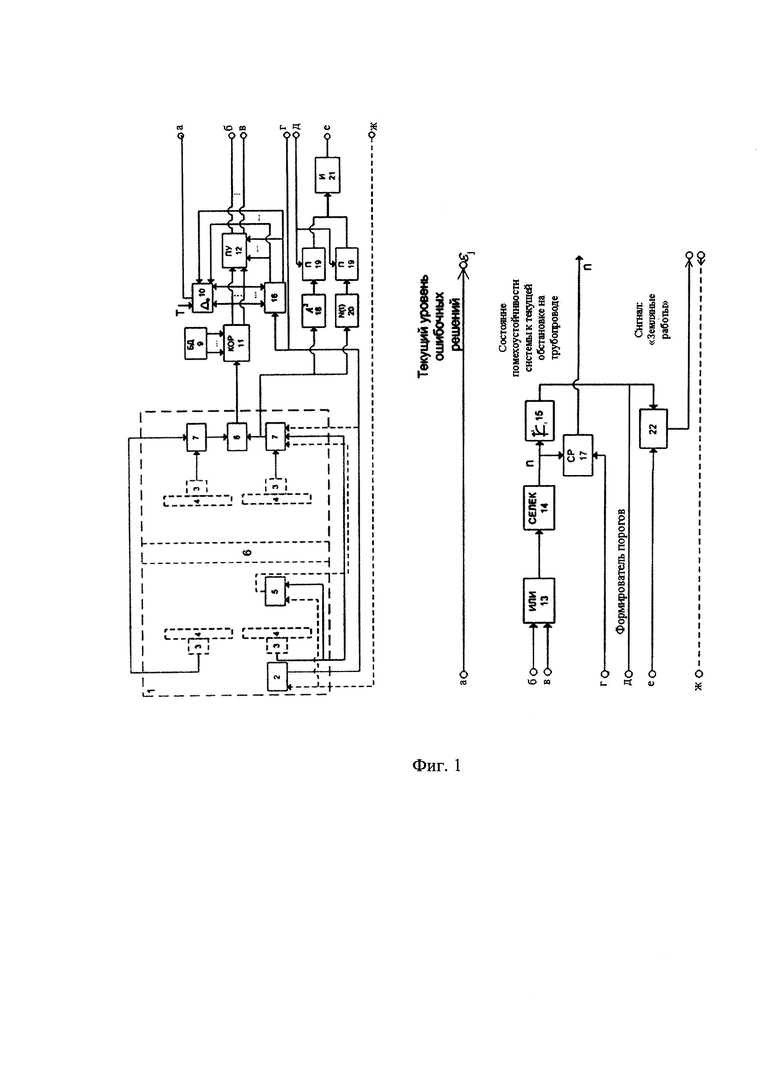
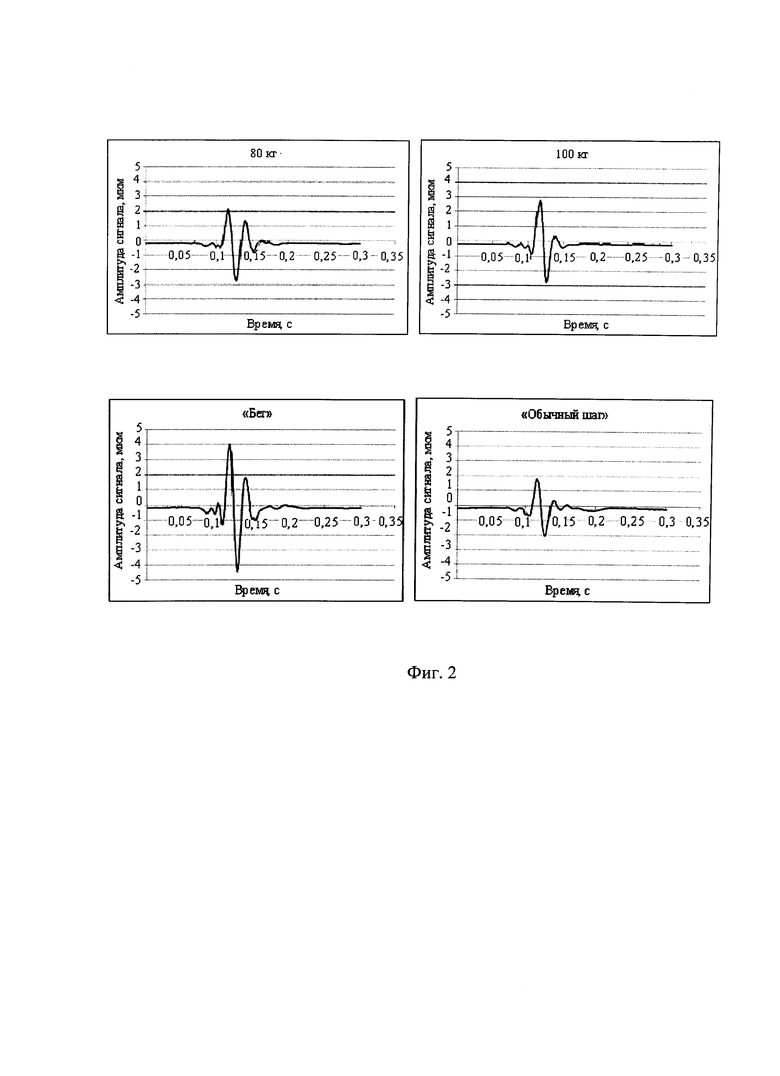
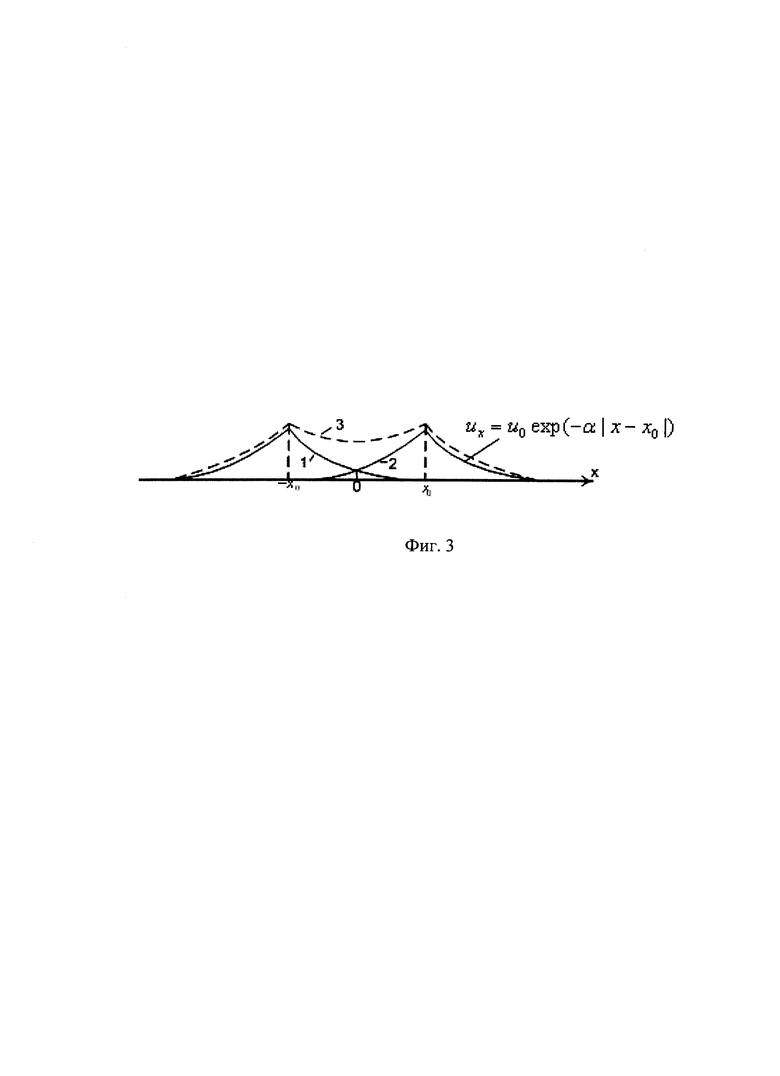
Сущность изобретения поясняется нижеследующим описанием и прилагаемыми к нему чертежами. На фиг. 1 приведена структурная схема, реализующая предлагаемый способ. На фиг. 2 показаны экспериментально полученные сигналы, регистрируемые геофоном при взаимодействии стопы субъекта с подстилающей поверхностью. Фиг. 3 поясняет алгоритм разнесения детекторов упругих колебаний от контролируемого трубопровода. Обозначения на фигурах: 1 - охранная зона, 2 - имитатор (генератор) упругих колебаний, формирующий импульсы давления на окружающий грунт, подобные импульсам давления от идущего человека, 3 - детектор упругих колебаний, 4 - металлическая полоса, на которую крепится детектор 3, 5 - имитатор (генератор) упругих колебаний, формирующий колебания давления на окружающий грунт, подобные колебаниям при проведении земляных работ, 6 - подземный трубопровод, 7 - сумматор, 8 - коммутатор, 9 - база данных сигналов от шагов субъектов, 10 - блок формирования текущей плотности распределения вероятностей нормированной взаимокорреляционной функции сигналов в базе данных с суммарным сигналом на выходе коммутатора 8, сформированной на интервале T, 11 - коррелятор, 12 - пороговые устройства, генерирующие стандартный импульс при превышении входного сигнала порогового уровня, 13 - схема дизъюнкции, 14 - селектор почти-периодических последовательностей импульсов, 15 - преобразователь «число последовательностей - длительность работ», 16 - формирователь пороговых уровней для схемы 12, 17 - схема сравнения, 18 - схема формирования огибающей энергии суммарного сигнала, 19 - решающее устройство, срабатывающее при превышении входного сигнала его значения в момент появления сигнала на выходе схемы 15, 20 - схема формирования огибающей плотности переходов через нуль суммарного сигнала, 21 - схема конъюнкции, 22 - схема принятия решений. На фиг. 2 индексами 1, 2 обозначены кривые чувствительности детекторов, установленных на удалении - x0 и x0 соответственно от трубопровода, индексом 3 пронумеровано - кривая чувствительности детекторов, измеренная по суммарному сигналу.
Представленная на фиг. 1 схема функционирует по следующему алгоритму. Упругие колебания в охранной зоне 1 регистрируются детекторами 3, установленными с каждой стороны от трубопровода 6. При использовании точечных детекторов (геофонов) увеличение зоны контроля реализуется с помощью металлических полосок 4, к которым они (детекторы) крепятся. Амплитуда упругих колебаний от точечного источника при распространении в грунте уменьшается в соответствии с выражением
U(x)=U0exp(jωt)·ехр(-γx)/хв,
где U0 - амплитуда волны источника, γ=σ+jk - комплексная постоянная распространения, k=(ω/c)=2Tλ - волновое число, ω=2πf - угловая частота колебаний, σ - коэффициент затухания, в - показатель фронта волны. Если на пути волны установить пространственный накопитель (металлическую полоску) и жестко скрепить ее с детектором, то за счет стягивания боковых лучей к детектору регистрируемая амплитуда колебания на его входе
 ,
,
где R0 - минимальное расстояние источника до детектора,  - путь, проходимый волной до произвольной точки металлической полосы и равный
- путь, проходимый волной до произвольной точки металлической полосы и равный  и от этой точки до детектора L. Очевидно,
и от этой точки до детектора L. Очевидно,  , где 2Lmax - длина полоски. Результаты расчетов: при R0=20 м, Lmax=3,5 м, (UΣ/U0)=6,2; при R0=20 м, Lmax=3 м, (UΣ/U0)=11. Таким образом, при использовании точечных детекторов для охраны периметра их число можно существенно сократить применением описанной операции пространственного интегрирования.
, где 2Lmax - длина полоски. Результаты расчетов: при R0=20 м, Lmax=3,5 м, (UΣ/U0)=6,2; при R0=20 м, Lmax=3 м, (UΣ/U0)=11. Таким образом, при использовании точечных детекторов для охраны периметра их число можно существенно сократить применением описанной операции пространственного интегрирования.
Сложение сигналов от смежных детекторов позволяет регистрировать вторжение нарушителей с обеих сторон от трубопровода с помощью одной регистрирующей схемы. Эту функцию выполняют сумматоры 7, каждая пара которых предназначена для контроля выделенного участка трассы.
Через коммутатор 8 суммарный сигнал поступает на согласованный фильтр (по принятой терминологии), включающий коррелятор 11 и базу данных сигналов, подлежащих обнаружению. Экспериментально полученные виды сигналов от шагов человека приведены на фиг. 2. По форме они идентичны и незначительно отличаются по длительности. В то же время в литературе приводятся данные, согласно которым длительность регистрируемого импульса от шаговых воздействий на грунт подчиняется эмпирическому соотношению  , где υ - скорость пешехода [6].
, где υ - скорость пешехода [6].
В соответствии с приведенным соотношением в диапазоне реальных скоростей движения нарушителя υ∈3; 9 км/ч будем иметь τш∈0,23; 0,4 с. Сигнал на выходе согласованного фильтра зависит от интервала интегрирования τш
 ,
,
где fэ(t) - эталонный сигнал, fc(f) - исследуемый сигнал; σfэ, σс - среднеквадратичные отклонения этих сигналов. Чтобы обеспечить максимум отношения сигнал/шум во всем диапазоне встречающихся длительностей обнаруживаемых сигналов, следует анализировать суммарный сигнал несколькими согласованными фильтрами, охватывающими диапазон возможных длительностей сигналов τш.. Для определения числа таких фильтров предложено много соотношений в последние тридцать лет прошлого века. Одно из них
 ,
,
где N - число фильтров; τmax, τmin - максимальная и минимальная длительности возможных сигналов, G - снижение отношения сигнал/шум на выходе фильтра при фильтрации сигнала, отличающегося по длительности от «проектного». Принимая (τmax/τmin)=2, G=1,1, получим а=1,13 и N=5,5. Таким образом, при допустимом снижении отношении сигнал/шум относительно предельно возможного на 10% для решения поставленной задачи потребуется 6 фильтров.
Принятый способ принятия решений относительно сигналов на выходе коррелятора - по их превышению заданного порога. Ясно, что установка постоянного порога в условиях изменяющихся во времени шумов (ветер, дождь и др.) не продуктивна в связи с непредсказуемыми изменениями вероятностей ложной тревоги и пропуска цели. В рамках особенностей решаемой задачи представляется целесообразным избежать пропуска факта ведения несанкционированных работ, зная при этом уровень возможной вероятности ложной тревоги.
Реализовать такую технологию удается введением специфических генераторов 2, 5. Первый из них по сигналам извне (штриховая линия управления) формирует упругие колебания, эквивалентные воздействию шагов субъектов на подстилающую поверхность в охранной зоне 1. Формирующиеся при этом выходные сигналы коррелятора 11 с помощью схемы 16, синхронизированной генератором 2, трансформируются в пороги принятия решений порогового устройства 12, корректировка которых может быть произведена с изменением обстановки в контролируемом участке охранной зоны.
Найденные пороги принятия решений используются также для оценки вероятности ошибочных решений при отнесении текущего значения суммарного сигнала к сигналу «шаг человека». С этой целью в течение заданного интервала времени Т формируются эмпирические плотности распределения вероятностей функций взаимной корреляции в схеме 10 и по поступлении на ее входы значений порогов принятия решений со схемы 16 вычисляются указанные оценки вероятностей, передаваемые по каналам связи в службу безопасности. Служба безопасности должна быть информирована об особенности шумовой обстановки в контролируемой зоне 1.
Схема 9 (база данных - сигналов взаимодействия стопы человека с подстилающей поверхностью) хранит совокупность сигналов, которые подлежат обнаружению в текущем суммарном сигнале.
Поток принятых решений (импульсов) о наличии в регистрируемом сигнале сигналов от шагов человека при различных скоростях его движения через схему дизъюнкции 13 поступает на селектор почти периодических последовательностей импульсов 14. Алгоритмы работы таких селекторов и схемы их реализации неоднократно описывались в литературе. С теорией таких селекторов можно ознакомиться в [7]. Следует здесь лишь подчеркнуть, что термин «почти-периодическая последовательность» допускает определенную модуляцию временного интервала между импульсами и ограничение их количества. Результаты работы селектора - определение числа указанных последовательностей в поступающем потоке решений. Каждая такая последовательность характеризует идущего нарушителя, их число - количество нарушителей в приближающейся к трубопроводу группе.
Ясно, чем больше численность нарушителей, тем меньше времени им потребуется, чтобы достичь заглубленного трубопровода. Такая зависимость носит нелинейный характер вида ТН=[1-ехр(-αn)], где α - коэффициент, характеризующий состояние грунта, метеоусловия, n - число нарушителей, ТН - минимально возможное время доступа к трубопроводу. Схема 15 формирует импульс длительностью ТН, появление которого означает: «в охраняемой зоне появились нарушители вида «homo sapiens», их число - n.
Схема сравнения 17 в режиме формирования порогов для схемы 12 проводит сравнение числа сгенерированных имитатором 2 последовательностей с обнаруженным селектором 14. Результат сравнения, отражающий состояние помехоустойчивости описываемой системы обнаружения к текущей обстановке в зоне трубопровода, передается в службу безопасности.
Одновременно с описанной частью схемы функционирует другая ее часть, обозначенная индексами 18-22. Ее функции - принять решение о проводящихся на трубопроводе земляных работах.
Необходимость введения такой генерации очевидна. Группа грибников может пересечь охранную зону или отдохнуть в ее границах. Требуется сигнал подтверждения, что, проникнув в охранную зону, они приступили к выполнению земляных работ, и эти работы продолжаются в течение времени, необходимом для доступа к трубопроводу.
Формирование шурфа приводит к приращению энергии регистрируемых колебаний детекторами 3. Кроме того, наблюдается приращение плотности переходов суммарного сигнала через нуль. Эти признаки земляных работ наиболее устойчивы (форма кривой спектральной плотности сильно зависит от используемого инструмента: лопата, мотыга и индивидуальных особенностей нарушителя, выполняющего раскопки).
Схемы 18 и 20 реализуют алгоритмы выделения из суммарного сигнала огибающих энергии и плотности переходов функции через нуль
 ,
,
где A(t) - амплитуда регистрируемого сигнала, n(t) - плотность переходов регистрируемого сигнала через нуль, τ - интервал интегрирования. Указанные функции f(t,τ), φ(t,τ) поступают на вход решающих устройств 19, которые включаются в работу в момент появления сигнала на выходе схемы 15, извещающего о появлении нарушителей в охранной зоне. Алгоритм работы этих схем: зафиксировать текущие значения f(t,τ) и φ(t,τ), принять их за пороги и формировать стандартный выходной сигнал при превышении последующими входными сигналами этих порогов. Если эти превышения произойдут на обоих каналах (что подтверждает схема конъюнкции 21) и в течение времени, превышающим найденное минимальное время доступа к трубопроводу (выход схемы 15), то принимается решение (схема 22): «ведутся земляные работы». Это решение передается в службу безопасности и трансформируется в звуковой сигнал тревоги на контролируемом участке охранной зоны с целью замедлить, а может быть прекратить ведущиеся без разрешения работы.
Как уже указывалось, включение в работу имитатора 2 позволяет установить пороги принятия решений по обнаружению сигналов от шагов человека в регистрируемом суммарном сигнале, исключающие пропуск нарушителя в текущей шумовой обстановке, а также обеспечивающие минимальный уровень ложной тревоги. После проведения такой операции включается генератор упругих колебаний 5, имитирующий сигналы земляных работ на продуктопроводе. Эти сигналы являются испытательными, т.е. схема 22 должна выработать сигнал «земляные работы», что свидетельствует о работоспособности всей системы в целом.
Генераторы (имитаторы) 2, 5 могут быть представлены физическими моделями (с вариантами исполнения таких имитаторов можно познакомиться в [8]). В другом варианте исполнения изложенного решения они могут представлять электронные имитаторы, подмешивающие испытательные сигналы в сумматоры 7 (штриховые линии управления).
При удалении детекторов от трубопровода чувствительность схемы 3 к земляным работам уменьшается (что следует из графиков на фиг. 3). Избежать этого можно таким размещением детекторов, чтобы уровень сигналов, сгенерированных в точках с координатами ±х0 и 0 на выходе сумматора, был одинаков, т.е. 2 А0 exp(-µx0)=A0 (1+ехр(-µ·2·х0)), где А0 - чувствительность детектора в точках ±x0, µ - коэффициент затухания упругих колебаний при распространении в почвогрунтах. Решение проведенного уравнения позволяет определить искомое разнесение детекторов х0.
Предварительная оценка (экспериментальная) эффективности предлагаемого технического решения оказалась достаточно высокой (см. табл.).
х=1 м, и υв=0-0,2 м/с
x=1 М, υв=3-6 м/с
В таблице приняты следующие обозначения: x - расстояние от источника шума до детектора, υ - скорость ветра, N - среднее число проезжающих автомобилей в минуту.
Источники информации
1. Пат. 2463590 РФ, G01N 29/04, опубл. 10.10.2012.
2. «Технологии охраны периметров: новые применения» // Мир и безопасность, 2004, №6.
3. Проспект выставки IFSEC 2012, прошедшей в мае 2012 г. в Международном выставочном центре NEC в Бирмингеме (Великобритания).
4. Введенский Б. Системы охраны периметров - новинки сезона 2006 г. // Системы безопасности, 2006, №4.
5. Патент на полезную модель №73992, G08B 13/22, опубл. 10.06.2008.
6. Звежинский С.С. Периметровые маскируемые сейсмические средства обнаружения // Специальная техника, 2004, №3.
7. Седякин Н.М. Элементы теории случайных импульсных потоков. - М.: Сов. радио, 1965.
8. Седякин Н.М. Элементы теории случайных импульсных потоков. - М.: Сов. радио, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКОВ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ НА ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ПРОДУКТОПРОВОДА | 2013 |
|
RU2523043C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА И ГРУППЫ ЛЮДЕЙ ПО СЕЙСМИЧЕСКИМ СИГНАЛАМ | 2007 |
|
RU2337405C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЙ ПАРАМЕТРОВ СРЕДЫ В ОКРУЖЕНИИ ЗАГЛУБЛЕННОГО МАГИСТРАЛЬНОГО ПРОДУКТОПРОВОДА | 2011 |
|
RU2463590C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ СВЕРХШИРОКОПОЛОСНОГО СИГНАЛА (ВАРИАНТЫ) | 2015 |
|
RU2595979C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ИЗМЕНЕНИЙ ПАРАМЕТРОВ ОБОЛОЧКИ ТРУБОПРОВОДА И ОКРУЖАЮЩЕЙ ЕГО СРЕДЫ | 2016 |
|
RU2626583C1 |
| Способ обнаружения несанкционированных воздействий на трубопровод | 2018 |
|
RU2676386C1 |
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2013 |
|
RU2553843C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ С НОРМИРУЕМОЙ ВЕРОЯТНОСТЬЮ ЛОЖНЫХ СРАБАТЫВАНИЙ | 2014 |
|
RU2570230C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ НА ОСНОВЕ ИЗЛУЧАЮЩЕГО КАБЕЛЯ | 2007 |
|
RU2338260C1 |
Изобретение относится к обеспечению безопасности эксплуатируемых подземных трубопроводов и предназначено для предотвращения врезок в трубу, установке боеприпасов для ее подрыва, имитаторов утечек перекачиваемого продукта для дезинформации службы безопасности, а также для обнаружения утечек перекачиваемого продукта. Технический результат позволяет повысить надежность обнаружения. В способе анализируется суммарный сигнал от детекторов упругих колебаний, установленных по обе стороны трубопровода на наличие в нем составляющих от шагов нарушителей с определением их численности. При обнаружении такой информации оценивают минимально возможное время доступа к трубопроводу группой нарушителей установленной численности. Одновременно формируют огибающие энергии и плотности переходов через нуль суммарного сигнала и решение принимают при превышении ими эталонных уровней в течение указанного минимально возможного времени доступа к трубопроводу. 8 з.п. ф-лы, 3 ил., 1 табл.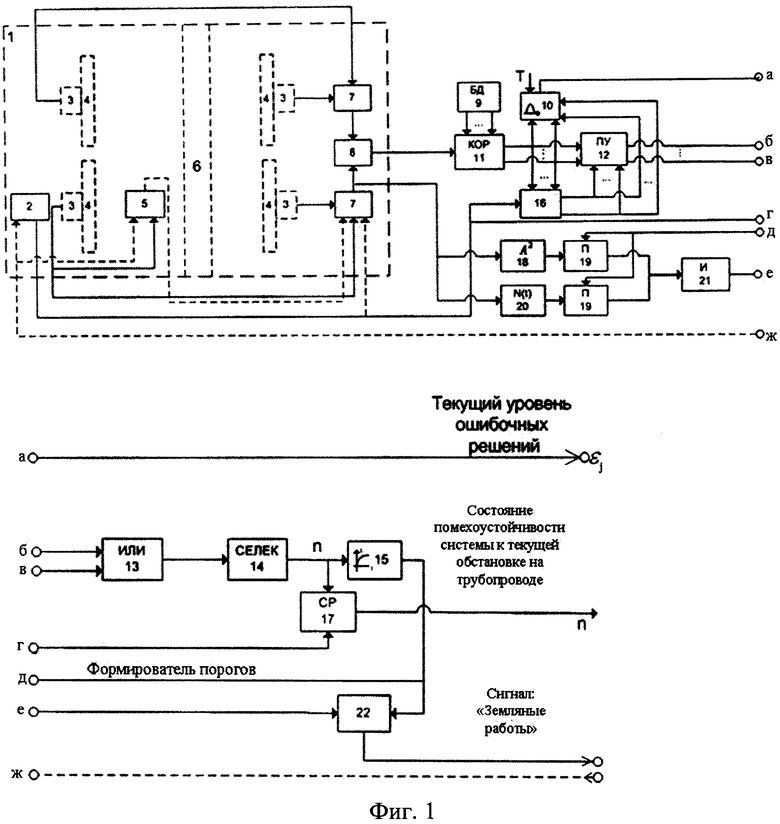
1. Способ обнаружения несанкционированных работ по доступу к подземному трубопроводу, включающий регистрацию упругих колебаний в почвогрунтах по обе стороны от трубопровода и их сравнение с эталонными уровнями, отличающийся тем, что регистрируемые колебания суммируют, в суммарном сигнале определяют составляющие от шагов нарушителей с определением численности нарушителей и определяют минимально возможное время доступа к подземному трубопроводу группой нарушителей установленной численности, формируют огибающие энергии и плотности переходов через нуль суммарного сигнала и при превышении ими эталонных уровней в течение упомянутого минимально возможного времени доступа к подземному трубопроводу формируют сигнал на контролируемом участке и передают его по телекоммуникационным каналам в службу безопасности.
2. Способ по п. 1, отличающийся тем, что в качестве эталонных уровней огибающих энергии и плотности переходов через нуль суммарного сигнала принимают значения огибающих энергии и плотности, регистрируемых при появлении в суммарном сигнале составляющих от шагов нарушителей.
3. Способ по п. 1, отличающийся тем, что наличие в суммарном сигнале составляющих от шагов нарушителей устанавливают по превышению нормированной взаимокорреляционной функцией этого сигнала с эталонными сигналами тех ее значений, которые наблюдались в момент включения имитатора сигналов шагов нарушителей при разных скоростях их передвижения.
4. Способ по п. 1, отличающийся тем, что численность нарушителей определяют по числу почти периодических последовательностей импульсов в суммарном сигнале.
5. Способ по п. 1, отличающийся тем, что минимально возможное время доступа нарушителей к подземному трубопроводу определяют в зависимости от числа обнаруженных нарушителей, состояния грунта и метеоусловий.
6. Способ по п. 3, отличающийся тем, что формируют оценки текущей плотности распределения вероятностей упомянутой взаимокорреляционной функции и по очередным ее значениям после включения имитатора сигналов шагов нарушителей определяют вероятность ложных решений по обнаружению проведения несанкционированных работ по доступу к подземному трубопроводу в ближайшем цикле обнаружения, значение которой по телекоммуникационным каналам передают в службу безопасности.
7. Способ по п. 3, отличающийся тем, что проводят сравнение количества сгенерированных в суммарном сигнале импульсных последовательностей с обнаруженными, результат сравнения по телекоммуникационным каналам передают в службу безопасности и по нему судят о состоянии помехоустойчивости обнаружения проведения несанкционированных работ по доступу к подземному трубопроводу в текущей обстановке у контролируемого подземного трубопровода.
8. Способ по п. 3, отличающийся тем, что формируют имитатором упругие колебания, отражающие процесс ведения земляных работ, а за эталонные уровни огибающих энергии и плотности переходов через нуль суммарного сигнала принимают текущие значения этих функций в момент установления минимально возможного времени доступа к подземному трубопроводу до включения упомянутого имитатора.
9. Способ по п. 1, отличающийся тем, что для регистрации упругих колебаний используют точечные детекторы упругих колебаний, при этом в почвогрунтах их прикрепляют к металлическим полоскам, устанавливаемым параллельно подземному трубопроводу.
| Соединение элементов деревянных конструкций | 1945 |
|
SU73992A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЙ ПАРАМЕТРОВ СРЕДЫ В ОКРУЖЕНИИ ЗАГЛУБЛЕННОГО МАГИСТРАЛЬНОГО ПРОДУКТОПРОВОДА | 2011 |
|
RU2463590C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ВИБРОАКУСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ПРОТЯЖЕННОГО ОБЪЕКТА | 2004 |
|
RU2271446C1 |
| US 5416724 A, 16.05.1995 | |||
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ТРУБОПРОВОДА | 2008 |
|
RU2350833C1 |

