Изобретение относится к диагностике состояния действующих подземных магистральных трубопроводов и может быть использовано для ведения разведки замаскированных малоразмерных целей на подстилающей поверхности в оптическом диапазоне волн.
Известен способ дистанционного обнаружения утечек нефти из магистрального трубопровода [Пат. 2073816 РФ, МПК F17D 5/02. Способ дистанционного обнаружения утечек нефти из магистрального трубопровода [Текст] / Алеев P.M., Алешко Е.Н., Чепурский В.Н.]. Согласно способу проводят аэросъемку теплового поля трассы трубопровода, определяют локальные участки с аномальной температурой, дополнительно проводят лазерное зондирование подстилающей поверхности трассы трубопровода на длинах волн поглощения излучения компонентами газовой фракции нефти и место утечки определяют по местоположению участка с аномальной температурой и повышенному поглощению отраженного лазерного излучения газовыми фракциями.
Недостатком этого способа является ограниченный набор обнаруживаемых предвестников чрезвычайных ситуаций (ЧС). Кроме того, характер флуктуации теплового поля трассы трубопровода непрерывно изменяется во времени и появление конкретной аномалии на тепловом изображении в момент проведения диагностики состояния исследуемого объекта обусловлено многочисленными причинами, одной из которых может быть утечка нефти. Поэтому надежность обнаружения данного вида ЧС не может быть высокой.
Известен способ обнаружения несанкционированных врезок в магистральные трубопроводы [Широбоков A.M. и др. Использование многоспектрального тепловизора «Терма-2» для контроля магистральных нефтепроводов // Изв. вузов. Приборостроение, 2002, т.45, №2, С.12-21]. Предложено использовать два диапазона оптического спектра излучений: 8-13,5 мкм для обнаружения замаскированных отводов («раскопов») похищаемого продукта и 1-1,2 мкм для выявления разливов нефти и почв, пропитанных нефтью. В связи с соизмеримостью сигналов от объектов обнаружения со среднеквадратичным отклонением флуктуации интенсивности излучения фонов и случайным изменением отношения сигнал/помеха во времени обеспечить приемлемый риск принятия решений в указанном способе не представляется возможным.
Известен способ поиска объекта в видимом диапазоне излучений, основанный на запоминании данных о разведываемой области земной поверхности и сравнении этих данных с регистрируемыми при последующем полете беспилотного летательного аппарата [Заявка на пат. 2002114606 РФ. Телевизионный способ и система поиска и видеонаблюдения [Текст] / Прокофьев Е.В.]. Недостатком способа является нестабильность полученных результатов из-за изменения маскирующих характеристик подстилающей поверхности во времени, обусловленных погодными условиями и временем суток.
Известен способ контроля состояния магистральных трубопроводов нефти и газа, основанный на получении видимых и тепловых снимков разведываемой трассы, их обработке для построения модели плотности потока теплового излучения и модели блоково-разломных структур, последующей интерпретации расчетных данных и составлении карт [Пат. 2428722 РФ, МПК G01V 8/00. Способ дистанционной диагностики магистральных трубопроводов [Текст] / Каримов К.М. и др.]. Способ ориентирован на выявление крупномасштабных изменений в зоне прокладки трубопроводов и не является эффективным для обнаружения малоразмерных целей в его охранной зоне.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому является способ диагностики состояния продуктопроводов [Заявка на пат. 2005110234/28 РФ. МПК G01V 8/00. Способ диагностики состояния продуктопроводов [Текст] / Байков Ю.П. и др.].
Согласно способу проводят съемку охранной зоны трубопровода в видимом и тепловом диапазонах излучения с летательного аппарата, осуществляют позиционирование летательного аппарата пилотажно-навигационными средствами и проводят интерпретацию полученных изображений. Недостатком способа является неучет при проведении операции интерпретации снимков фактора динамичности параметров подстилающей поверхности и отношения сигнал/помеха, обусловленного погодными условиями и временем съемки. В результате надежность обнаружения малоразмерных целей в известном способе оказывается невысокой.
Целью изобретения является повышение надежности принимаемых решений при интерпретации тепловых и видимых изображений охранной зоны трубопровода на наличие замаскированных врезок, подкопов, утечек перекачиваемого продукта в любое время суток и при любых погодных условиях.
Указанная цель достигается тем, что по трассе пролегания трубопровода до проведения работ по получению изображений формируют имитаторы предвестников чрезвычайных ситуаций, координаты которых заносят в пилотажно-навигационные средства, полученные изображения трансформируют в пространство решений путем проведения согласованной с изображениями имитаторов фильтрации и использования в качестве порогов принятия решений выходных сигналов фильтров от изображений соответствующих имитаторов, одновременно определяют корреляционные функции полученных изображений с последующим вычислением по их параметрам и указанным выше порогам принятия решений потенциального числа ложных решений, наносят на полученные изображения отметки о принятых решениях и потенциальном числе ложных решений, передают по радиоканалу на диспетчерский пункт те из этих изображений, на которых были приняты решения о наличии на них проявлений предвестников чрезвычайных ситуаций и которые предоставляются для интерпретации человеку или автомату. Кроме того, при превышении на очередном фрагменте изображения трассы числа принятых решений о наличии предвестников чрезвычайных ситуаций допустимых границ на диспетчерский пункт передают только координаты этих фрагментов и число принятых на них решений, причем при превышении верхней границы результат интерпретации переданных данных сводится к решению о повторной диагностике данного участка трассы, нижней границы - о необходимости устранения обнаруженных предвестников чрезвычайных ситуаций.
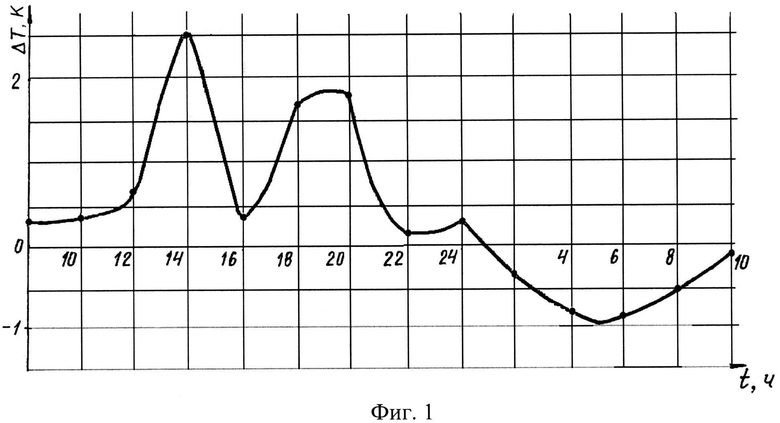
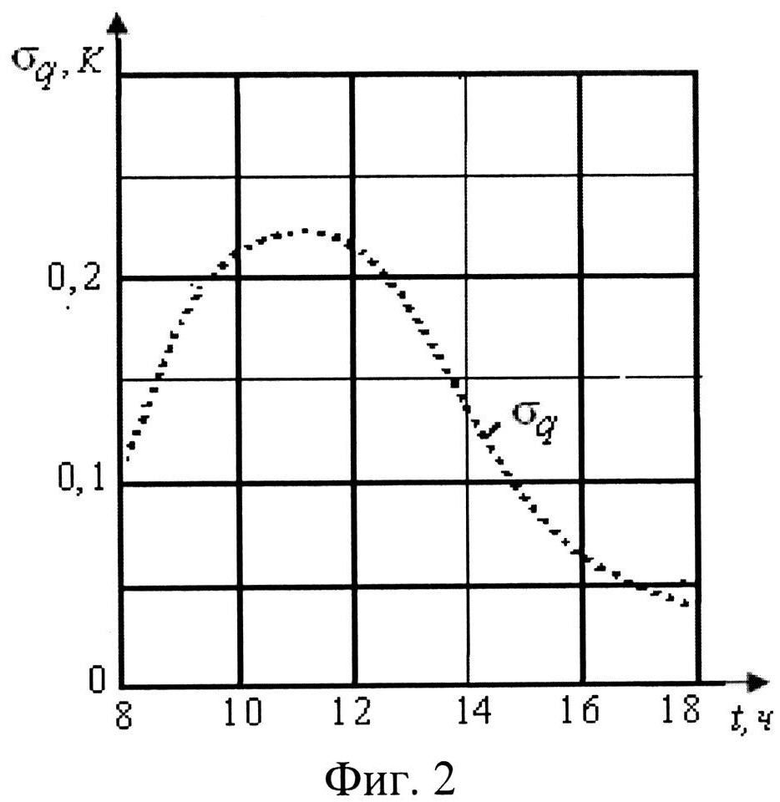
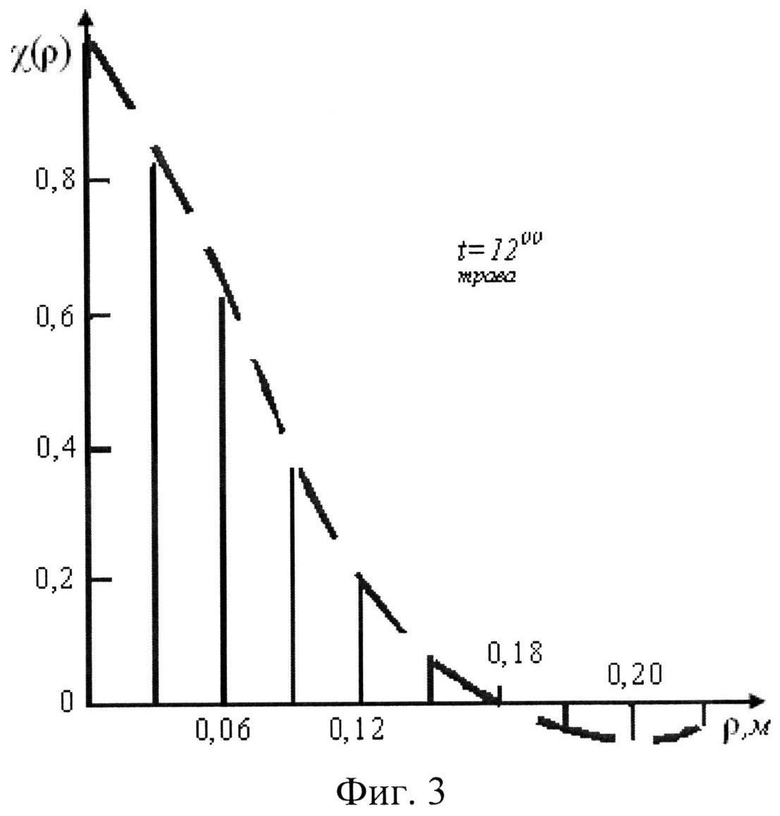
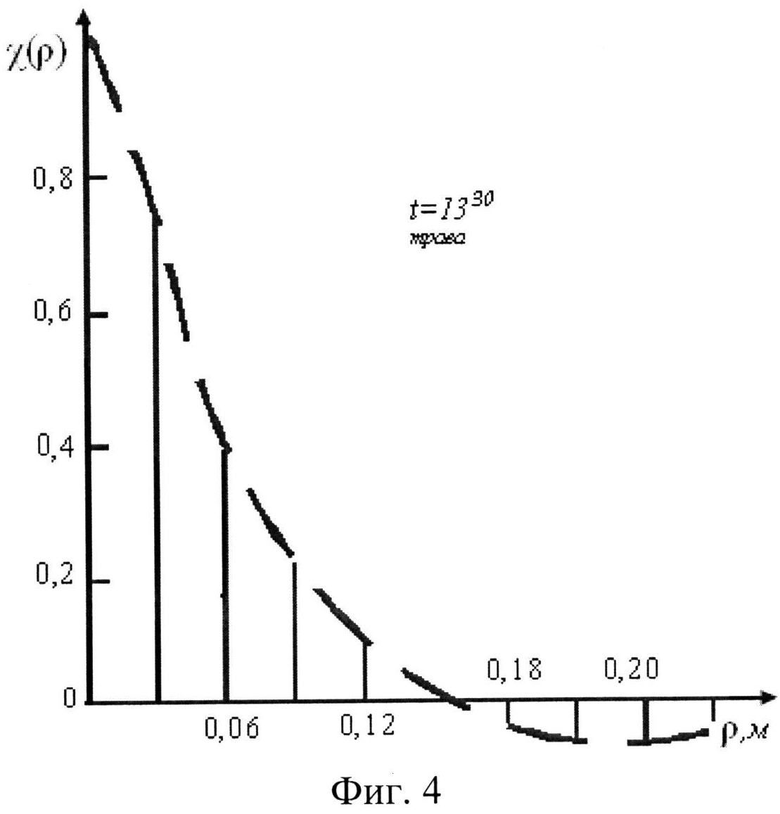
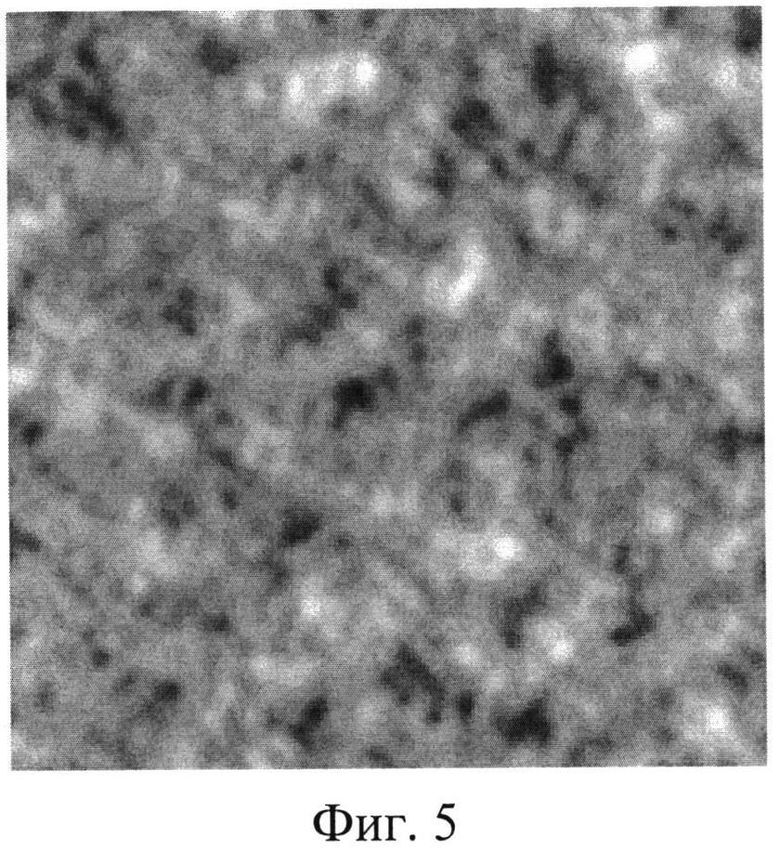
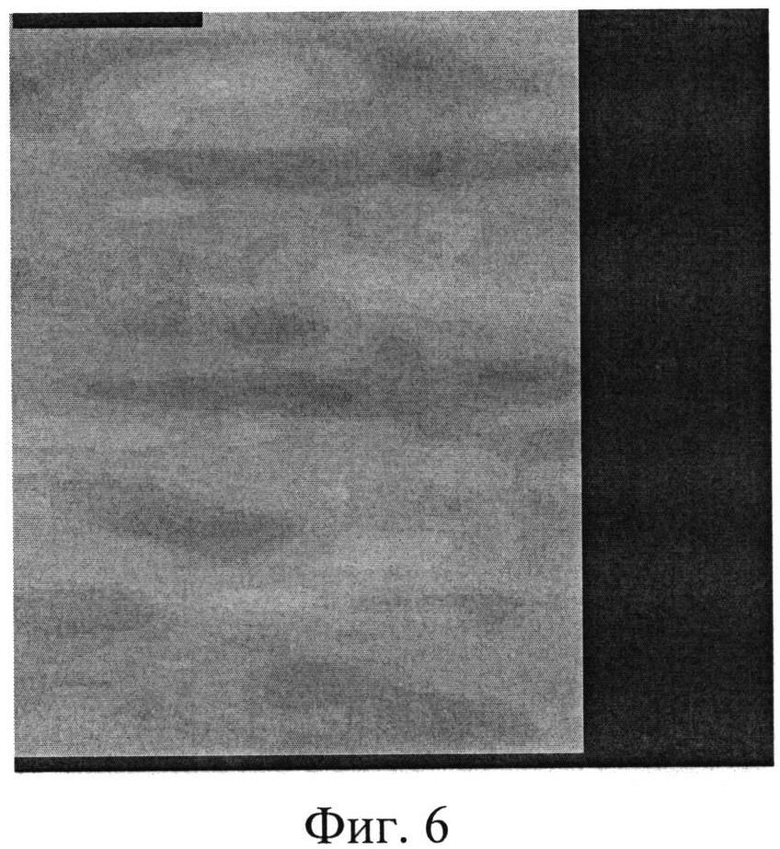
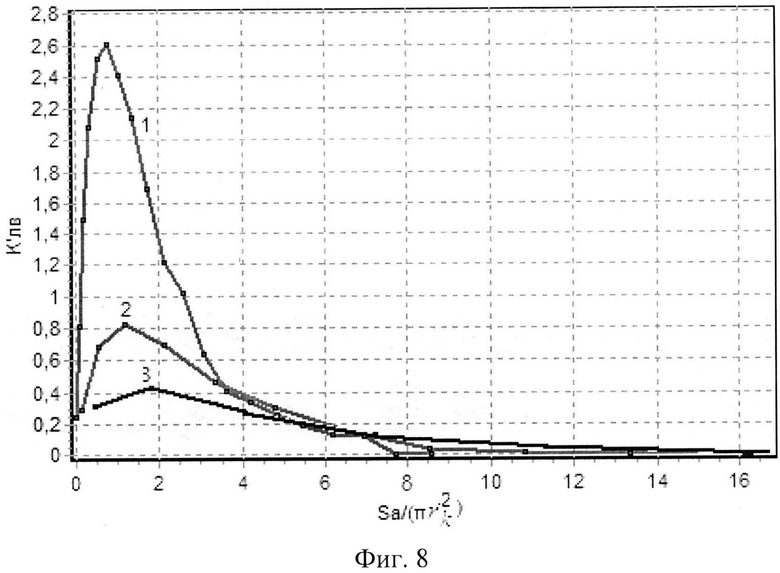
Сущность изобретения поясняется нижеследующим описанием и прилагаемыми к нему чертежами. На фиг.1 приведен график изменения разности температур над местом отвода продукта и в отдалении от него на расстоянии 1 м, на фиг.2 показана кривая изменения во времени среднеквадратического отклонения флуктуации излучения подстилающей поверхности в диапазоне 8-14 мкм в солнечный день, на фиг.3, 4 проиллюстрировано изменение корреляционной функции тепловых изображений травяных покровов в течение полутора часов, на фиг.5 представлено изображение участка подстилающей поверхности, на фиг.6 - результат его преобразования апертурой типа «стенка, параллельная оси абсцисс». Фиг.7 отражает вид обнаруживаемых объектов, фиг.8 - распределения ложных выбросов для преобразованного поля с корреляционной функцией 
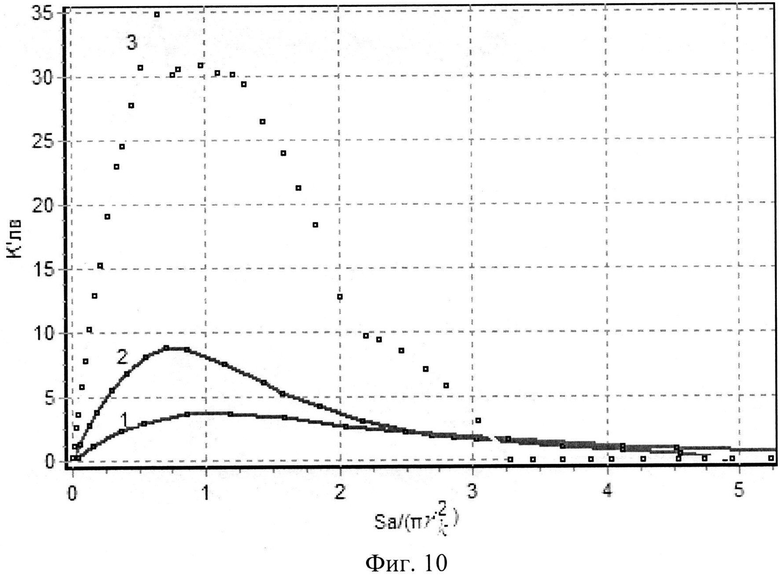
На фиг.10 показано изменение плотности ложных решений на поле с корреляционной функцией 
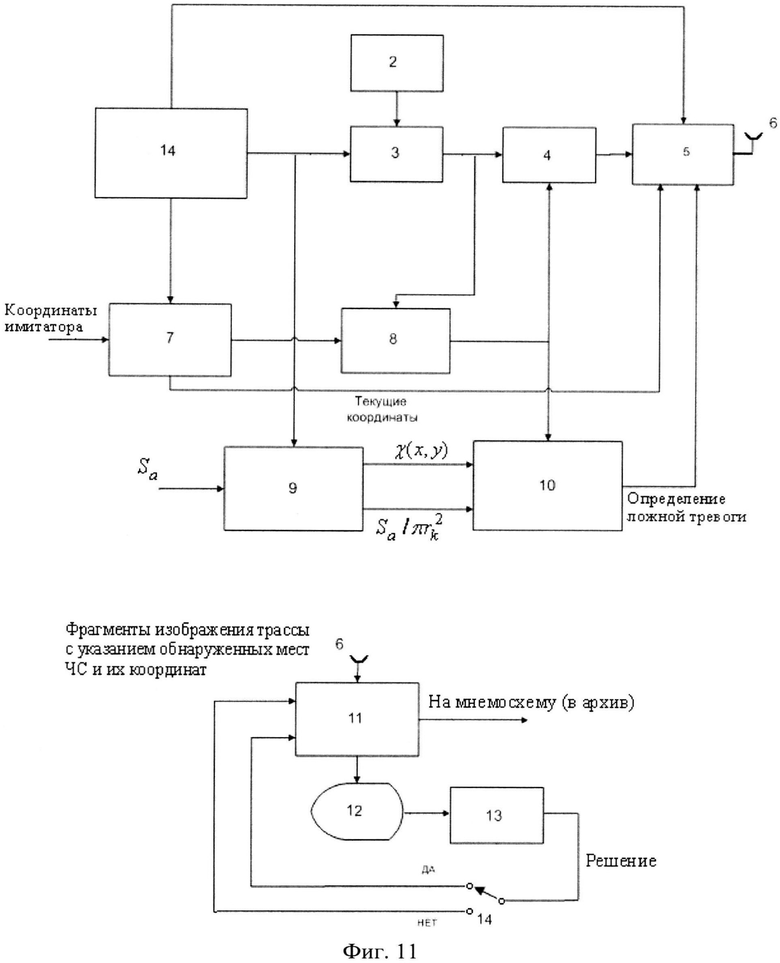
На фиг.11 представлена структурная схема, реализующая предлагаемый способ: 1 - наблюдаемый оптико-электронным прибором участок изображения трассы, 2 - база изображений обнаруживаемых предвестников ЧС, 3 - блок согласованных фильтров, 4 - блок пороговых устройств, 5 - блок формирования передаваемой информации, 6 - антенны, 7 - пилотно-навигационные средства, 8 - формирователь порогов принятия решений, 9 - блок вычисления корреляционной функции и параметра 
Охранная зона магистрального трубопровода ограничена «параллельными вертикальными плоскостями, расположенными по обе стороны от оси его линейной части на расстоянии 25 метров» [Технический регламент «О безопасности магистральных трубопроводов для транспортировки жидких и газообразных углеводородов» / Проект №408228-5, внесен Правительством РФ]. Объекты обнаружения: шурфы, врезки, утечки перекачиваемого продукта. Для установки боеприпасов или врезки формируется шурф над трубопроводом. Диаметр шурфа приблизительно равен 1 м. По окончании этой работы производится раскоп траншеи для отвода продукта за границу охранной зоны (до 500 м). Ширина траншеи - около 30-40 см. В нее укладывается металлическая или пластмассовая труба диаметром 50-60 мм. После этого места раскопов засыпаются почвой и маскируются снятым дерном. По данным [Широбоков A.M. и др. Использование многоспектрального тепловизора «Терма-2» для контроля магистральных нефтепроводов // Изв. вузов. Приборостроение, 2002, т.45, №2, с.12-21] «места несанкционированных врезок не видны глазом ни с земли, ни с патрульного вертолета и могут быть выявлены последовательным протыканием почв металлическим прутом». В тепловом диапазоне оптических излучений регистрируется сигнал при наличии замаскированных шурфа или врезки.
Незначительные утечки перекачиваемого продукта (до 50 л/ч) не регистрируются традиционными методами контроля, основанными на измерении давления и расхода продукта в трубопроводах. Различают выбросы продукта в атмосферу, грунт, воду, снег. По отраженным излучениям регистрируются выбросы нефтепродуктов в атмосферу. Выбросы в другие среды регистрируются по тепловым аномалиям, которые отличаются от радиационной температуры фона на 0,6-6,8 К (в грунт), 0,5-2 К (под снежный покров). Изображения тепловых аномалий от утечек выглядят преимущественно в виде кругов с «рваными» краями [Алеев P.M., Овсянников В.А., Чепурский В.Н. Воздушная тепловизионная аппаратура для контроля нефтепродуктопроводов. - М.: Недра, 1995. - 160 с.]. При существующей чувствительности тепловизионных систем (~0,05 К) решить проблему воздушной диагностики состояния магистральных трубопроводов на первый взгляд представляется не сложной задачей.
Результаты анализа изменения амплитуды тепловых аномалий указанных видов во времени позволили сделать вывод о ее зависимости от погодных условий и физических параметров подстилающей поверхности [Егоров В.И. и др. Влияние локальной неоднородности грунта на температурное поле его поверхности / Научно-технический вестник СПбГУ ИТМО, вып.31, 2006. - С.104-107.]. На фиг.1 приведены экспериментальные результаты измерений разности температур подстилающей поверхности над местом созданного отвода продукта и в отдалении от него, полученные нами в июне месяце. В течение значительного времени суток место отвода оказывается невидимым в тепловом диапазоне оптических излучений.
Наряду с амплитудой сигнала существенно изменяются во времени и маскировочные характеристики подстилающей поверхности (структура корреляционной функции флуктуации излучения). В рамках проведенных авторами исследований замечено, что в полуденные часы радиус корреляции rk(t) этих флуктуации минимален, а среднеквадратичное отклонение σq максимально. С течением времени rk(t) растет, σq уменьшается (тепловые контрасты «расплываются»). Регрессионная зависимость обозначенных факторов для травяных покровов по результатам проведенных экспериментов имеет вид
rk(σq)=rk[σq(t0)]-0,11σq+0,1,
где 0,11 - нормирующий множитель размерности, м3/Вт, t0 - время наступления режима изотермии, определенное в [Епифанцев Б.Н. О расчетной оценке дисперсии пространственных флуктуации теплового излучения земной поверхности // Исследование Земли из космоса, 1985, №3, с.40-45]. О характере изменения дисперсии 
В условиях, когда амплитуда сигнала и маскирующие характеристики фона изменяются по неизвестному закону во времени, формализованная постановка задачи обнаружения предвестников ЧС, обозначенного выше вида, не представляется возможной. Задачи такого сорта поручается решать человеку, вероятность обнаружения цели на фоне помех которого (эмпирический результат) описывается формулой [Гущин А.Б., Епифанцев Б.Н. Алгоритм обнаружения врезок в подземные трубопроводы на видеоизображениях // Вестник СибАДИ, вып.2 (20), 2011, с.35-39]:

{1-exp[-0,15(ОСП-1)2]}·РМ
где РТ - вероятность обнаружения одиночного объекта на идеальном фоне (без помех), РΛ - вероятность обнаружения объектов значительных размеров в зависимости от отношения сигнал/помехи (ОСП), РМ - составляющая вероятности обнаружения объектов в зависимости от маскирующих особенностей подстилающей поверхности (вида корреляционной функции фона), характеризующих формы «пятнистости» выбросов помех, Сб=16 град2·(кд/м2)-0,3·(угл. мин.)-3·с-1, К=ΔВ/Вф - яркостный контраст объекта на фоне яркостью Вф, γ - угловой размер объекта, τц=(LЭ/υP) - время поиска объекта, LЭ - размер наблюдаемого на экране монитора изображения местности в направлении полета, υP - скорость разведки, 2β - угловой диаметр поля обзора. Связь составляющей РM с характеристиками флуктуации фона, насколько нам известно, не установлена. Не известен и принцип формирования порога принятия решений субъектом при решении задач обозначенного вида.
Однако использование человека в качестве решающего звена в системе «Система получения изображений, установленная на летательном аппарате - канал передачи изображений в пункт управления - оператор (дешифровщик)» ограничено. Прежде всего, допустимая скорость движения дешифрируемого изображения, представляемого оператору для обнаружения малоразмерных целей, не приемлема. Действительно, примем диаметр разрешаемого над подстилающей поверхностью пикселя равным 0,1 м (при худшем разрешении отличить неподвижного человека от булыжника становится проблематичным). Тогда при разложении изображения на 600 строк, представляемого на экране монитора, получим LЭ=60 м. Принимая ОСШ=5, Вф=50 кд/м2, размер экрана 0,3×0,3 м, Pоб=0,99, расстояние «глаз-экран» - 1 м, получим следующие оценки. Если К=0,05, то υP=30 км/ч, при К=0,1, υP<100 км/ч/. Это неприемлемые ограничения по скорости полета, и использование системы «преобразователь излучения - монитор - оператор» продуктивно при введении запоминающего устройства получаемых изображений и воспроизведении их со скоростью, регулируемой оператором.
Такая технология имеет существенный недостаток. Так, спутниковая система «Лэнд Сат» дает каждые 18 дней точнейшую фотографию каждого квадратного дюйма земной поверхности. Однако из-за ограничения скорости дешифрирования операторами 95% принимаемого на пункте управления материала «никто и никогда не видел, несмотря на крайнюю необходимость знать, что творится с поверхностью Земли» [Гор. Эл. Земля на чаше весов. Экология и человеческий дух. - М.: ППП, 1993. - 432 с.]. Необходимость разработки новой технологии воздушной разведки протяженных трасс, основанной на автоматизации операции обнаружения ненормативных отклонений на объекте контроля с передачей результатов расшифровки в пункт управления (диспетчерский пункт), очевидна.
На сегодняшний день отсутствуют эффективные алгоритмы обнаружения на видеоизображениях трассы пролегания подземных магистральных трубопроводов замаскированных врезок и мест будущего выхода вытекающих продуктов на подстилающую поверхность.
Предлагается следующее решение поставленной задачи.
По трассе трубопровода формируются имитаторы предвестников ЧС:
замаскированные шурфы и отводы перекачиваемого продукта, а также имитатор утечки продукта заданной интенсивности. Формирование первых двух имитаторов не имеет особенностей, они реализуют известный подход по созданию реальных отводов. Что касается последнего варианта создания имитатора, следует использовать эффект локального охлаждения подстилающей поверхности за счет более быстрого выхода на поверхность газообразной составляющей продукта [Алеев P.M., Овсянников В.А., Чепурский В.Н. Воздушная тепловизионная аппаратура для контроля нефтепродуктопроводов. - М.: Недра, 1995. - 160 с.]. В соответствии с законом Джоуля-Томсона при выходе на поверхность (включая и вытесненные из пор газовые составляющие почвогрунтов) за счет перепада давления температура ее понижается. Сымитировать этот эффект можно несколькими способами. Наиболее простой основан на создании в локальной области почвы избыточного давления за счет генерации нейтрального газа химическим или физическим способами.
Со временем ввиду нарушения процесса тепломассопереноса в системе почва-растение-воздух в местах формирования шурфов и отводов продукта формируется оптический контраст в отраженном излучении [Нерпин С.В., Чудновский А.Ф. Энерго- и массообмен в системе растение-почва-воздух. - Л.: Гидрометеоиздат, 1975. - 360 с.]. Меняется и тепловой контраст. Например, для диапазона 8-14 мкм радиационный контраст можно представить в виде [Епифанцев Б.Н. и др. Трубопроводный транспорт: нейтрализация новых угроз безопасности. - Омск, Изд-во СибАДИ, 2006. - 295 с.]
где Δε и ΔT - разности степеней черноты и температуры подстилающей поверхности в зоне объекта и в отдалении от него, 8 - используемый диапазон излучений 8-14 мкм. Для хорошо замаскированных траншей отведения продукта радиационный контраст может отсутствовать: (Δε/εф)=0. Только температурная составляющая µТ=ΔТ/(Т-230) демаскирует объект. По истечении определенного времени растет составляющая контраста (Δε/εф) и появляется оптический контраст в отраженном излучении практически во всех окнах прозрачности атмосферы.
Разведка трассы проводится с использованием летательного аппарата.
В соответствии с [ФЗ Технический регламент «О безопасности магистральных трубопроводов для транспортировки жидких и газообразных углеводородов» / Проект №408228-5, внесен Правительством РФ] трассы магистральных трубопроводов на местности должны быть обозначены столбиками, установленными с интервалами 1000 м и привязанными к трассе (координаты).
Можно воспользоваться этим обстоятельством и формировать имитаторы, привязав их установку к координатам столбиков. Тогда при пролете имитаторов пилотно-навигационные средства формируют сигнал, по которому устанавливаются уровни принятия решений для обозначенных выше предвестников ЧС по амплитуде откликов от сформированных изображений имитаторов. По предварительной оценке количество мест на контролируемой трассе протяженностью в 250 км, где требуется установка имитаторов, не превышает 2-х.
Установка имитаторов позволяет получить информацию об уровнях сигналов от интересующих предвестниках ЧС в текущий момент времени. При невысоком темпе их изменения эти уровни будут соответствовать действительным в течение цикла ведения разведки (~1 ч). Информация подобного рода - основа избежать пропуска цели (ошибки 1 рода). Однако остается неясным вопрос о ложных тревогах. При незнании плотности ложных решений знание только пороговых уровней полезных сигналов не позволяет считать разведывательную систему описанного назначения эффективной.
Действительно, сравнение экспериментальной кривой среднеквадратичного отклонения флуктуации излучения подстилающей поверхности в диапазоне 8-14 мкм (фиг.2) с изменениями полезного сигнала (фиг.1) приводит к выводу о необходимости поиска способов борьбы с помехами в этом фрагменте приложения теории обнаружения сигналов.
Теория нацеливает на использование согласованных с формой и геометрическими характеристиками объекта пространственных фильтров, призванных обеспечить повышение отношения сигнал/помеха и тем самым снизить вероятность ложной тревоги [Левшин В.Л. Пространственная фильтрация в оптических системах пеленгации. - М.: Советское радио, 1971. 200 с.]. Однако практика выдвигает столь высокие требования к частоте ложных решений (нормальным считается одно ложное срабатывание в течение 350 часов работы охранной системы) [Звежинский С.С. Проблема выбора периметровых средств обнаружения // М.: Специальная Техника. - 2002. - №4. - С.36-41], что применение такого преобразования оказывается недостаточным для их обеспечения.
В поисках более эффективного решения проведен ряд вычислительных экспериментов. Фрагменты изображений трассы были преобразованы в другие изображения путем интегрирования в границах апертур (согласованных с искомым объектом пространственных фильтров) значений изображения подстилающей поверхности в каждой его точке (в порядке стандартной телевизионной развертки). В качестве примера на фиг.5, 6 приведены изображения исходного и преобразованного полей.
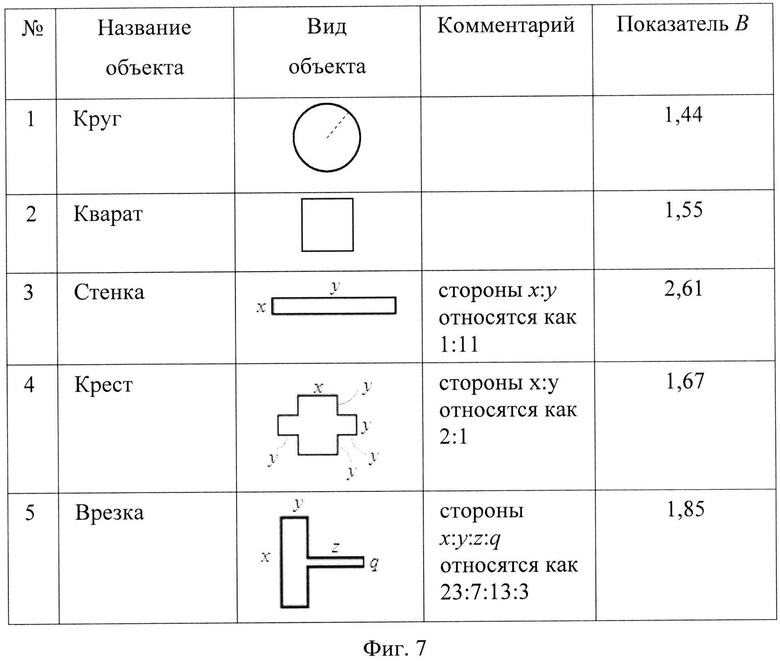
На фиг.7 показаны объекты, которые необходимо было обнаружить на изображении. Приведенный показатель формы объекта В описан в [Живичин А.Н. Дешифрирование фотографических изображений. - М.: Недра, 1980. - 253 с.]
где Р - периметр по контуру объекта, 
Введем показатель плотность ложных решений

где Sa и SП соответственно площади апертуры и анализируемого поля, KΛB -
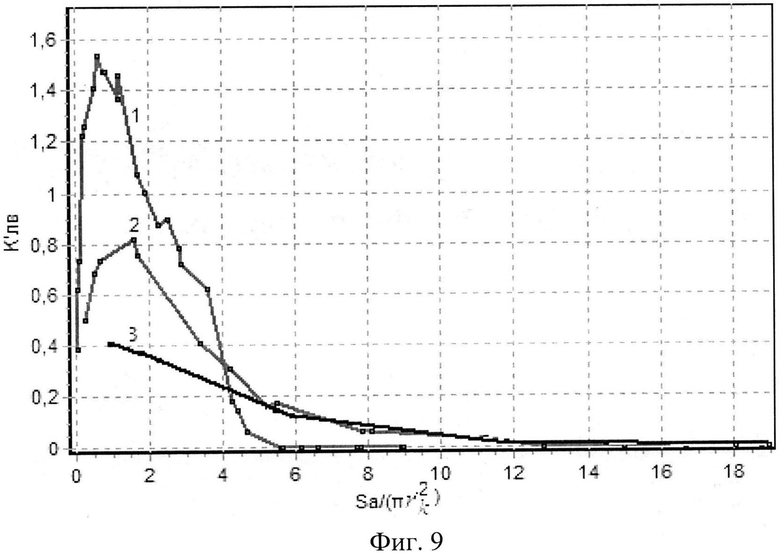
число выбросов, превышающих уровень среднеквадратического отклонения флуктуации поля. Фрагменты вычислительного эксперимента, отражающие зависимость 
Обращает на себя внимание сильная зависимость числа ложных решений от вида корреляционной функции случайного поля, ее параметров и формы обнаруживаемого объекта. Без учета этой информации снизить частоту ложных решений на выходе с использованием согласованной фильтрации даже с введением адаптивного порога принятия решений невозможно.
Основываясь на приведенных выше результатах, предлагается следующий способ решения задачи обнаружения предвестников ЧС на трассе пролегания подземных магистральных трубопроводов.
Изображение трассы 1 на фиг.2 в процессе полета преобразуется согласованными пространственными фильтрами (последовательная свертка изображений искомого объекта с фрагментом наблюдаемого поля в каждой точке в порядке телевизионной развертки). Эту функцию выполняют блоки 2 и 3 (фиг.11). При появлении в поле зрения оптико-электронного преобразователя изображений имитаторов, координаты которых заранее введены в пилотажно-навигационную систему 7, вырабатывает сигнал, по которому блок 8 запоминает текущие уровни от преобразованных изображений имитаторов (выход блока 3) и которые используются в качестве порогов принятия решений до появления другой группы изображений имитаторов предвестников ЧС.
Первое пороговое устройство 4 выдает на выход все выбросы согласованного фильтра, превышающие установленные уровни по каждому имитатору. Блок 5 присваивает им текущие координаты и передает наблюдаемый фрагмент изображения трассы с указанием (рамка, стрелка) обнаруженных мест предвестников ЧС и их координат.
Одновременно с указанными выше операциями в блоке 9 определяется вид функции корреляции наблюдаемого поля излучения (отражения) и показатель 
Приемная часть системы (антенный блок - запоминающее устройство - монитор) работает по следующему алгоритму. Поступающая информация запоминается в блоке 11 (окончание фиг.11). Оператор 13 может вывести фрагменты запомненных изображений на экран монитора 12 и принять решение, согласующееся с решением автомата (стрелка, рамки) или нет. С помощью кнопок 14 он транслирует свое решение блоку 11. В первом случае проанализированное изображение перебрасывается в архив, во втором - сообщается наземной службе безопасности о подозрительных местах на трассе и их координатах.
В отличие от известных решений оператору для интерпретации предоставляется во много раз меньше информации о состоянии трассы для принятия решения, появляется время более детально рассмотреть подозрительный фрагмент изображения трассы, растет надежность обнаружения.
Решение принимается с учетом решений автомата, работающего с предельно возможным объемом информации о характеристиках искомых объектов и фонов в заданный момент времени с учетом динамики их параметров в прошлом. Подобный подход исключает возможность пропуска цели и информирует оператора о числе ложных решений, сопутствующих правильному решению. Если их число велико (выбросы фона сходны с выбросами от искомых объектов) и превышает принятый граничный уровень, избежать непродуктивных решений следует переносом срока проведения разведки на другое время.
При снижении числа ложных решений вероятность правильных решений быстро увеличивается и при достижении ее установленного уровня доверия оператор без колебаний извещает службу безопасности о необходимости устранения обнаруженного предвестника чрезвычайной ситуации.
Поскольку сигналы от имитаторов, полученные по отраженным и собственным излучениям, могут отсутствовать на одном канале и быть представленными на другом, использование 2-х каналов получения информации ведет к повышению надежности обнаружения искомых объектов. Кроме того, двухканальная система позволяет решать вопрос об установлении времени появления предвестников чрезвычайных ситуаций на эксплуатируемом подземном трубопроводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ЛИНЕЙНОЙ ЧАСТИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616736C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕДВЕСТНИКОВ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ НА ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ПРОДУКТОПРОВОДА | 2013 |
|
RU2523043C1 |
| Способ обнаружения несанкционированных воздействий на трубопровод | 2018 |
|
RU2676386C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННЫХ РАБОТ ПО ДОСТУПУ К ПОДЗЕМНЫМ ТРУБОПРОВОДАМ | 2013 |
|
RU2576730C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| Автономный имитатор демаскирующих признаков подвижных наземных военных объектов | 2024 |
|
RU2832146C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| УНИВЕРСАЛЬНЫЙ ИМИТАТОР ПОДВИЖНОГО НАЗЕМНОГО ВОЕННОГО ОБЪЕКТА | 2023 |
|
RU2805098C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 1992 |
|
RU2036372C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПРОДУКТОПРОВОДОВ | 2005 |
|
RU2281534C1 |
Способ предназначен для решения задачи дистанционного обнаружения предвестников чрезвычайных ситуаций на подземных магистральных трубопроводах. Способ осуществляют получением и анализом изображений по отраженным и собственным излучениям подстилающей поверхности трассы пролегания трубопровода. До начала съемки трассы формируют имитаторы обозначенных предвестников с запоминанием их координат в пилотажно-навигационном средстве воздушного носителя. Получаемые в процессе полета изображения трансформируют в пространство решений посредством согласованных фильтров и использования в качестве порогов принятия решений выходных сигналов фильтров от изображений соответствующих имитаторов. Одновременно определяют корреляционные функции полученных изображений для подсчета числа ложных решений и по этому числу и сформированному пространству решений судят о наличии на исследуемой трассе предвестников чрезвычайных ситуаций соответствующего вида. Технический результат: повышение надежности обнаружения, сокращение объема передаваемой по каналу связи информации. 1 з.п. ф-лы, 11 ил.
1. Способ дистанционной диагностики состояния линейной части подземных магистральных трубопроводов, основанный на получении изображений по отраженным и собственным излучениям подстилающей поверхности охранной зоны трубопровода с летательного аппарата, его текущем позиционировании пилотажно-навигационными средствами, интерпретации изображений, отличающийся тем, что по трассе пролегания трубопровода до проведения работ по получению изображений формируют имитаторы предвестников чрезвычайных ситуаций, координаты которых заносят в пилотажно-навигационные средства, полученные изображения трансформируют в пространство решений путем согласованной с изображениями имитаторов фильтрации и использования в качестве порогов принятия решений выходных сигналов фильтров от изображений соответствующих имитаторов, одновременно определяют корреляционные функции полученных изображений с последующим вычислением по их параметрам и указанным выше порогам принятия решений потенциального числа ложных решений, наносят на полученные изображения отметки о принятых решениях и потенциальном числе ложных решений, передают по радиоканалу на диспетчерский пункт те из этих изображений, на которых были приняты решения о наличии на них проявлений предвестников чрезвычайных ситуаций и которые предоставляются для интерпретации.
2. Способ по п.1, отличающийся тем, что при превышении на очередном фрагменте изображения трассы числа принятых решений о наличии предвестников чрезвычайных ситуаций допустимой границы на диспетчерский пункт передают только координаты этого изображения и число принятых на нем решений, причем результат интерпретации переданных данных сводится к решению о повторной диагностике данного участка трассы.
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ УТЕЧЕК НЕФТИ ИЗ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1994 |
|
RU2073816C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ПРОДУКТОПРОВОДОВ | 2005 |
|
RU2281534C1 |
| US 6766226 B2, 20.07.2004 | |||
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2012 |
|
RU2509002C2 |

