Устройство для обнаружения человека и группы людей по сейсмическим сигналам относится к области технических средств охраны и может быть использовано для обнаружения движущихся нарушителей по их сейсмическим сигналам при охране территорий и подступов к различным объектам.
Известно "Устройство для обнаружения вторжения" [1], содержащее (фиг.1): 1 - сейсмический приемник (СП), 2 - полосовой фильтр (ПФ), 3 - детектор огибающей (ДО), 4 - блок вычисления признаков (БВП), 5 - пороговое устройство (ПУ) и 6 - решающий орган (РО).
В рассмотренном устройстве обнаружение человека и группы людей основано на вычислении признаков: длительность импульса воздействия, период следования импульсов, средний уровень огибающей.
Недостаток заключается в том, что вероятность правильного обнаружения зависит от величины периода шагов и от значений порогов U1, U2, U3, которые не адаптированы к условиям применения.
Из известных наиболее близким по технической сущности является "Устройство обработки сейсмических сигналов для систем охранной сигнализации" [2], содержащее (фиг.2): 1 - сейсмический приемник (СП), полосовой фильтр (ПФ), 3 - пороговое устройство (ПУ), 4 - коррелятор, 5 - формирователь интервала наблюдения (ФИН), 6 - таймер, 7 и 9 - схема "И", 8 - схема "ИЛИ", 10 - компаратор нулевого уровня (КНУ), 11 - частотный компаратор (ЧК).
При превышении входным сейсмическим сигналом порога U1, значение которого устанавливается с учетом сейсмического фона окружающей среды, в корреляторе определяется периодический характер следования входных импульсов, т.е. соответствие периода следования коррелированных импульсов выбранному интервалу корреляции Δt. При наличии последовательности коррелированных импульсов происходит запуск формирователя интервала наблюдения. Если сформированный интервал наблюдения будет больше, чем заданный интервал усреднения (порог U2), и количество коррелированных импульсов в принятом сигнале за интервал усреднения окажется больше порога U3, то в частотном компараторе вычисляется число пересечений сигналом нулевого уровня за сформированный интервал усреднения. Полученное значение признака сравнивается с пороговым значением (U4). При превышении порога (при высокочастотных помехах) за интервал наблюдения в схеме "И" принимается решение об отсутствии полезного сигнала, в противном случае принимается решение о наличии нарушителя. В зависимости от значения признака возможно также принятие решение о типе объекта.
Недостаток заключается в том, что эффективность работы и помехоустойчивость работы устройства зависит от нескольких пороговых значений: уровень сейсмического шума окружающей среды, интервал корреляции, длина интервала усреднения и количество коррелированных импульсов за его длительность. Заранее заданный интервал корреляции приведет к снижению эффективности устройства, так как период следования импульсов в сейсмическом сигнале нарушителя меняется в зависимости от характера и скорости движения нарушителя и их количества.
Предлагаемое изобретение направлено на повышение эффективности обнаружения нарушителя или группы нарушителей.
Это достигается тем, что в устройство обработки сейсмических сигналов для систем охранной сигнализации, содержащее полосовой фильтр, подключенный к выходу сейсмического приемника, формирователь интервала наблюдения, коррелятор, пороговое устройство и схему "И", согласно предлагаемому изобретению дополнительно введены детектор огибающей сигнала, блок вычисления признаков, матрица эталонов, детектор максимального значения вектора и регистр кода эталонов, причем вход детектора огибающей сигнала подключен к выходу полосового фильтра, а выход - к первому входу блока вычисления признаков, ко второму входу которого подключен формирователь интервала наблюдения, а выход блока вычисления признаков соединен с первым входом коррелятора, второй вход которого соединен с матрицей эталонов, выход коррелятора подключен ко входу детектора максимального значения вектора, первый выход которого подключен ко входу порогового устройства, а второй выход - ко входу регистра кода эталонов, выход порогового устройства соединен с первым входом схемы "И", второй вход которой соединен с выходом регистра кода эталонов.
Вычисление 200 признаков в блоке вычисления признаков по формулам 1 и 2 позволяет повысить эффективность устройства за счет выделения полезной информации о свойствах и характере сейсмического сигнала. При частоте дискретизации 60 Гц 200 признаков вычисляются за время, равное примерно 3.33 с.
Введение матрицы эталонов, содержащей значения 200 признаков, полученных по различным сейсмическим сигналам движущегося нарушителя или группы нарушителей, а также сигналам помех как искусственного, так и естественного происхождения, позволяет отнести входной сигнал к сигналу нарушителя, сейсмического фона или помехи, не используя фиксированных пороговых значений периода и количества коррелированных импульсов, а также обеспечивает возможность адаптации устройства к изменениям условий эксплуатации путем процедуры "дообучения" матрицы эталонов.
Введение детектора максимального значения вектора позволяет определить максимальное значение произведения матрицы эталонов и вектора признаков входного сигнала, величина которого будет различна для сейсмических сигналов нарушителя, сейсмического фона и помех.
Введение регистра кода эталонов позволяет повысить помехозащищенность устройства за счет определения кода эталона, произведение которого (эталона) с вектором признаков входного сигнала дало максимальный результат. Код эталона установлен равным "1" для сейсмических сигналов нарушителя или группы людей и "0" для сейсмического фона и помех. При формировании матрицы эталонов параллельно формируется вектор, состоящий из кодов соответствующих эталонов, который затем хранится в регистре кода эталонов.
На фиг.3 представлена блок-схема предлагаемого устройства для обнаружения движущегося человека и группы людей по сейсмическим сигналам.
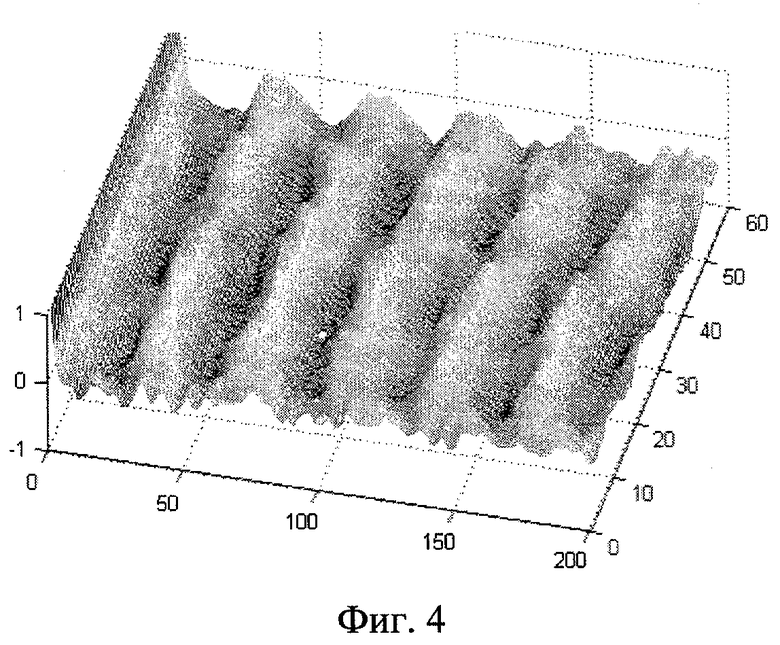
На фиг.4 графически изображена матрица признаков.
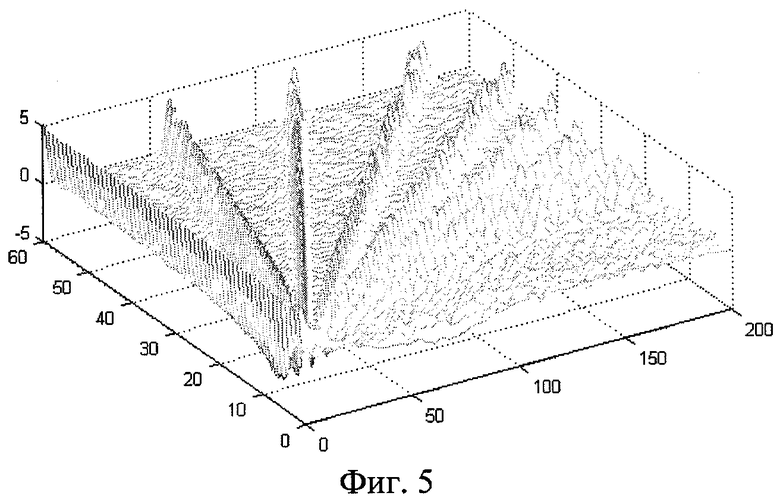
На фиг.5 графически изображена матрица эталонов.
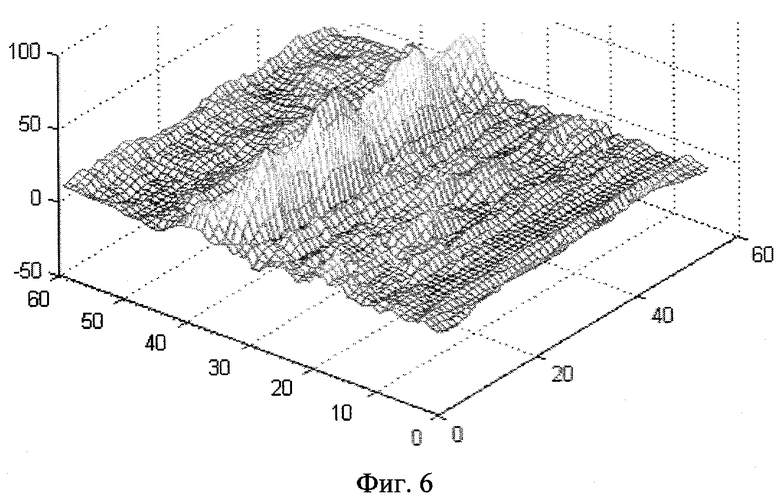
На фиг.6 графически представлен результат произведения матрицы признаков входного сигнала с матрицей эталонов.
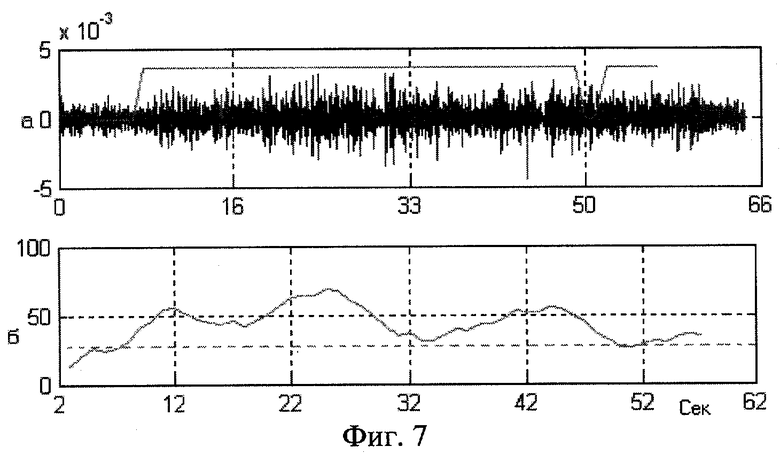
На фиг.7 представлен результат тестирования обнаружителя на сейсмическом сигнале идущего человека.
На фиг.8 представлен результат тестирования устройства на сейсмическом сигнале группы идущих людей.
На фиг.9 приведена оценка помехоустойчивости работы устройства на сигнале сейсмического фона в условиях леса.
Устройство (фиг.3) содержит:
1 - сейсмический приемник;
2 - полосовой фильтр, работающий в диапазоне 1...30 Гц;
3 - детектор огибающей сигнала;
4 - блок вычисления 200 признаков;
5 - формирователь интервала наблюдения, значение которого фиксировано и равно 1 с;
6 - коррелятор;
7 - матрица эталонов;
8 - детектор максимального значения вектора;
9 - регистр кода эталонов;
10 - пороговое устройство;
11 - схема "И".
При этом сейсмический приемник 1 соединен с полосовым фильтром 2, выход которого подключен ко входу детектора огибающей сигнала 3; блок вычисления признаков 4 первым входом подключен к выходу детектора огибающей сигнала 3, а вторым входом подключен к выходу формирователя интервала наблюдения 5; коррелятор 6 первым входом соединен с выходом блока вычисления признаков 4, а вторым входом соединен с матрицей эталонов 7; выход коррелятора 6 подключен ко входу детектора максимального значения вектора 8, первый выход которого подключен ко входу порогового устройства 10, а второй выход - ко входу регистра кода эталонов 9; выход порогового устройства 10 соединен с первым входом схемы "И" 11, второй вход которой соединен с выходом регистра кода эталонов 9.
Работает устройство для обнаружения человека и группы людей по сейсмическим сигналам следующим образом.
На вход полосового фильтра 2 поступает сейсмический сигнал с выхода сейсмического приемника 1, который фильтруется в диапазоне 1...30 Гц.
На первый вход блока вычисления признаков 4 поступает сглаженная огибающая сейсмического сигнала после детектора огибающей сигнала 3. В блоке вычисления признаков 4 вычисляется вектор признаков за интервал наблюдения, который поступает на второй вход блока вычисления признаков 4 с выхода формирователя интервала наблюдения 5. Его значение фиксировано и выбрано равным 1 с, так как за это время, при наличии движущегося нарушителя, в сейсмическом сигнале будет присутствовать как минимум один импульс.
При вычислении матрицы признаков M1 используются зависимости (1, 2).

где 
n - время усреднения признаков, равное 6 с; х - вектор дискретных отсчетов значений огибающей сигнала; N - длинна вектора в отсчетах (N=200), j=0, 1,...N. Индекс i=0, 1, 2... задает сдвиг временного окна анализа текущего вектора с дискретностью 1 с, что обеспечивает принятие решения об обнаружении каждую секунду. Вычисление признаков основано на нахождении нормированных корреляционных моментов и их усреднении.
На фиг.4 изображена матрица признаков M1, рассчитанная за время 60 с для сейсмического сигнала одного человека, идущего по прямолинейной траектории в зоне чувствительности сейсмического приемника 70...100 м.
В корреляторе 6 находится произведение матрицы признаков M1, поступающего на первый вход коррелятора 6 и матрицы эталонов 7 (фиг.5), поступающей на второй вход коррелятора 6.
Матрица эталонных сигналов 7, содержащая значения 200 признаков сейсмических сигналов нарушителя или группы нарушителей, сейсмического фона и помех, формируется в процессе "обучения" устройства. Причем в процессе ее формирования сохраняется информация о принадлежности каждого эталона к полезному сигналу, сейсмическому фону или помехе в регистре кода эталонов 9. Каждому эталону в регистре кода эталонов 9 соответственно присваивается код "1" для полезного сигнала или "0" для сигналов сейсмического фона или помехи.
Матрица из 60-ти эталонов M1, используемая в реальном обнаружителе человека или группы людей, показана на фиг.5.
Для реального сейсмического сигнала движущегося одного человека на фиг.6 показан результат перемножения матрицы признаков M1 с матрицей эталонов M2.
Использование матрицы эталонов 7 дает широкие возможности для оперативной коррекции алгоритма обнаружения. При разработке алгоритма невозможно учесть все особенности сигналообразования, присущие конкретным условиям его применения. Поэтому алгоритм предусматривает возможность "дообучения" для исключения ложного срабатывания алгоритма, например, от неучтенного ранее вида помехи или при неучтенных ранее условиях работы. Процедура "дообучения" обеспечивает быструю настройку алгоритма и позволяет тем самым отстроиться от влияния различного рода внешних факторов как естественного, так и искусственного происхождения, характерных для той местности, где используется сейсмическая система обнаружения.
Вектор, полученный в корреляторе 6, поступает на вход детектора максимального значения вектора 8, в котором определяется максимальное значение вектора и индекс эталона, при перемножении с которым этот максимум был получен.
В пороговом устройстве 10 происходит сравнение максимального значения произведения матрицы эталонов и вектора признаков входного сигнала, поступающего на первый вход, с порогом U1. При превышении входного значения порога на выходе порогового устройства 10 формируется "1". В результате предварительных исследований для сейсмических сигналов одного человека или группы людей значение порога U1 выбрано равным 30 единицам.
В регистре кода эталонов 9 определяется код эталона, индекс которого поступает на вход со второго выхода детектора максимального значения вектора 8. В результате на выходе регистра кода эталонов 9 будет присутствовать "1" ("разрешение") или "0" ("запрет") соответственно для сейсмического сигнала нарушителя и сейсмического фона или помехи.
В схеме "И" 11 принимается решение об обнаружении нарушителя или его отсутствии. Если на второй вход схемы "И" 11 поступает "0", то происходит "запрет" на обнаружение полезного сигнала, что повышает помехозащищенность устройства.
Для реального сейсмического сигнала одного человека, по которому были построены матрицы M1, M1×M2 (фиг.4, 6), на фиг.7 показан результат работы обнаружителя. На фиг.7а приведен исходный сигнал и сигнал обнаружения, на фиг.7б - порог принятия решения и график изменения максимального значения произведения матриц M1 и M2.
На фиг.8а показан результат работы обнаружителя на примере сейсмического сигнала 3-х человек, идущих по окружности с радиусом 50 м относительно СП, а график изменения максимального значения произведения матриц M1×M2 изображен на фиг.8б. Из чертежа видно, что обнаружение нарушителей производится достаточно уверенно.
Показательным свойством любого устройства является помехоустойчивость его работы. Для оценки помехоустойчивости предлагаемого устройства были произведены записи сигналов сейсмического фона в условиях леса при порывах ветра до 18 м/с. Результаты тестирования обнаружителя показаны на фиг.9.
Результат показывает, что на протяжении 13 минут воздействия большой сейсмической помехи, обусловленной движением корней деревьев под влиянием ветра, алгоритм не дал ложного срабатывания.
Предлагаемое устройство позволяет обеспечивать вероятность обнаружения движущегося человека или группы людей не ниже 0.97 в радиусе до 70 м от СП при вероятности ложных срабатываний не более 0.001 (при наличии помех естественного и искусственного происхождения). В условиях леса дальность обнаружения человека или группы людей уменьшается до 30 м. Предлагаемое устройство позволяет решить задачу обнаружения для нарушителей, передвигающихся шагом, бегом, на лыжах, по-пластунски.
Представленное устройство хорошо работает на любом типе грунта и, как правило, не требует индивидуальной настройки для него.
Источники информации
1. Патент США 3879720 G08B 13/00, George James Dusheck. Energy peak/time averaging seismic intrusion detec (Устройство для обнаружения вторжения).
2. Патент RU 2242799, G08B 13/16. Бурмистров Е.C., Глазунов Б.П., Груздов В.А., Окулов С.А., Ольховская И.В., Фролов С.Б. Устройство обработки сейсмических сигналов для систем охранной сигнализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2306611C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2004 |
|
RU2262744C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННЫХ РАБОТ ПО ДОСТУПУ К ПОДЗЕМНЫМ ТРУБОПРОВОДАМ | 2013 |
|
RU2576730C2 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| СЕЙСМИЧЕСКИЙ НЕКОНТАКТНЫЙ ДАТЧИК ОБНАРУЖЕНИЯ ЧЕЛОВЕКА | 2017 |
|
RU2671885C1 |
| СЕЙСМИЧЕСКИЙ КОМПЕНСАТОР ПОМЕХ БЛОКА УВЧ РЫБОПОИСКОВОГО ЭХОЛОТА | 2006 |
|
RU2321023C1 |
| ПРОТИВОПЕХОТНОЕ НЕКОНТАКТНОЕ ВЗРЫВАТЕЛЬНОЕ УСТРОЙСТВО | 2015 |
|
RU2623403C2 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов | 2017 |
|
RU2650703C1 |




Изобретение относится к области технических средств охраны и может быть использовано для обнаружения движущихся нарушителей по их сейсмическим сигналам при охране территорий и подступов к различным объектам. Сущность: устройство содержит сейсмический приемник, полосовой фильтр, детектор огибающей, блок вычисления признаков и формирователь интервала наблюдения, коррелятор и матрицу эталонных сигналов, детектор максимального значения вектора и регистр кода эталонов, пороговое устройство и схему "И". Для обеспечения высокой эффективности обнаружения и помехозащищенности в устройстве вычисляется 200 признаков, используется матрица эталонных сигналов и регистр кода эталонов. Решение об обнаружении полезного сигнала нарушителя или группы нарушителей принимается по величине максимального произведения вектора признаков входного сигнала с матрицей эталонов, а помехозащищенность устройства достигается за счет определения кода эталона, на котором это максимальное произведение было достигнуто, и подачи сигнала "запрета" или "разрешения" на схему "И". 9 ил.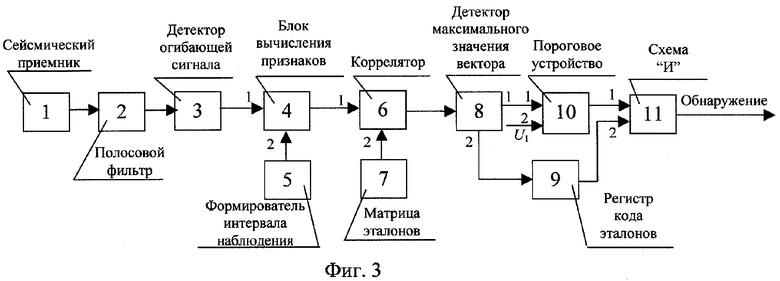
Устройство для обнаружения человека и группы людей по сейсмическим сигналам, содержащее полосовой фильтр, подключенный к выходу сейсмического приемника, формирователь интервала наблюдения, коррелятор, пороговое устройство и схему "И", отличающееся тем, что в устройство дополнительно введены детектор огибающей сигнала, блок вычисления признаков, матрица эталонов, детектор максимального значения вектора и регистр кода эталонов, причем вход детектора огибающей сигнала подключен к выходу полосового фильтра, а выход - к первому входу блока вычисления признаков, ко второму входу которого подключен формирователь интервала наблюдения, а выход блока вычисления признаков соединен с первым входом коррелятора, второй вход которого соединен с матрицей эталонов, выход коррелятора подключен ко входу детектора максимального значения вектора, первый выход которого подключен ко входу порогового устройства, а второй выход - ко входу регистра кода эталонов, выход порогового устройства соединен с первым входом схемы "И", второй вход которой соединен с выходом регистра кода эталонов.
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| RU 2004131048 А, 10.04.2006 | |||
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| US 5545858 А, 13.08.1996 | |||
| US 4458341 А, 03.07.1984 | |||
| US 4528559 А, 09.07.1985. | |||

