Настоящее изобретение относится к приводному механизму для устройства доставки лекарственного вещества, в частности для устройства, разработанного для доставки фиксированных доз.
Портативные устройства доставки лекарственного вещества используются для введения лекарственного вещества, пригодного для самостоятельного введения пациентом. Устройство доставки лекарственного вещества особенно удобно в форме ручки, которой можно легко манипулировать и хранить наготове повсеместно. Лекарственное вещество доставляется с помощью приводного механизма, который также может служить для установки доставляемой дозы. Один тип устройства доставки лекарственного вещества выполнен с возможностью повторного заполнения, а значит, многократного использования.
В документе DE 102 37 258 B4 описано устройство доставки лекарственного вещества в форме шприца-ручки, имеющей приводной механизм, элементы которого вращаются относительно друг друга вокруг общей оси.
Задача настоящего изобретения заключается в раскрытии нового приводного механизма для устройства доставки лекарственного вещества, а также устройства доставки лекарственного вещества, содержащего новый приводной механизм.
Данная задача решается с помощью приводного механизма по п.1 формулы изобретения и устройства доставки лекарственного вещества по п.10 формулы изобретения. Дополнительные задачи решаются с помощью вариантов осуществления согласно зависимым пунктам формулы изобретения.
Приводной механизм для устройства доставки лекарственного вещества содержит ходовой винт, гайку ходового винта, а также ведущее звено, расположенные по оси, определяющей аксиальное направление и противоположное аксиальное направление. Соединение между ходовым винтом и гайкой ходового винта позволяет ходовому винту совершать винтовое перемещение относительно гайки ходового винта, по меньшей мере, в аксиальном направлении. Ходовой винт соединен с ведущим звеном, при этом соединение создает винтовое перемещение ходового винта относительно ведущего звена, когда ведущее звено перемещается в аксиальном направлении относительно ходового винта. Соединение отключается для предотвращения винтового перемещения ходового винта относительно ведущего звена, когда ведущее звено перемещается в противоположном аксиальном направлении относительно ходового винта. Стопорный элемент выдачи гайки ходового винта и стопорный элемент выдачи ведущего звена взаимодействуют и тем самым предотвращают создание винтового перемещения ходового винта при приближении к заданному концевому положению ведущего звена.
В одном варианте осуществления приводного механизма стопорные элементы выдачи имеют соответствующие контактные поверхности, наклоненные по отношению к оси.
Предпочтительно создание винтового перемещения ходового винта предотвращается путем взаимодействия наклонных контактных поверхностей. Например, взаимодействие содержит скользящее перемещение, по меньшей мере, одной из наклонных контактных поверхностей по другой наклонной контактной поверхности. В частности, приводной механизм может быть выполнен так, что наклонная контактная поверхность стопорного элемента выдачи ведущего звена выполнена с возможностью скольжения вдоль наклонной контактной поверхности стопорного элемента выдачи гайки ходового винта. Тем самым можно вызвать вращение ведущего звена, в частности вращение ведущего звена относительно гайки ходового винта. Угол наклона, по меньшей мере, одной из наклонных контактных поверхностей может соответствовать шагу резьбы ведущего звена, входящего в зацепление с ходовым винтом.
В дополнительном варианте осуществления приводного механизма стопорные элементы выдачи имеют соответствующие контактные поверхности, созданные в качестве концевых поверхностей и препятствующие вращению ведущего звена относительно гайки ходового винта, по меньшей мере, в одном направлении.
В дополнительном варианте осуществления приводного механизма стопорный элемент выдачи гайки ходового винта имеет форму призмы или усеченной призмы.
В дополнительном варианте осуществления приводного механизма стопорные элементы выдачи направляют ведущее звено относительно гайки ходового винта при совершении винтового перемещения, имеющего тот же шаг, что и винтовое перемещение ходового винта относительно ведущего звена.
Например, такое перемещение может создаваться путем взаимодействия наклонных контактных поверхностей стопорных элементов выдачи, в частности путем взаимодействия наклонных контактных поверхностей, имеющих угол наклона, соответствующий шагу резьбы ведущего звена, входящего в зацепление с ходовым винтом.
Дополнительный вариант осуществления приводного механизма содержит гибкий направляющий элемент ходового винта и винтовую резьбу ведущего звена. Соединение ходового винта с ведущим звеном обеспечивается гибким направляющим элементом, входящим в зацепление с винтовой резьбой. Винтовая резьба имеет тот же шаг, что и винтовое перемещение ходового винта относительно ведущего звена.
Дополнительный вариант осуществления приводного механизма содержит стопорные элементы ходового винта, препятствующие винтовому перемещению ходового винта, когда ведущее звено перемещается в противоположном аксиальном направлении относительно ходового винта.
В дополнительном варианте осуществления приводного механизма стопорный элемент выдачи гайки ходового винта выполнен как нераздельная часть гайки ходового винта, а стопорный элемент выдачи ведущего звена выполнен как одно целое с ведущим звеном.
В дополнительном варианте осуществления приводного механизма ведущее звено и гайка ходового винта вращательно зафиксированы.
Устройство доставки лекарственного вещества, оборудованное приводным механизмом, может содержать корпус, имеющий дистальный конец и проксимальный конец, разнесенные в направлении оси приводного механизма.
Корпус может представлять собой, например, какой-либо кожух или любой компонент, образующий часть кожуха. Корпус может также представлять собой какую-либо вставку, соединенную с наружным кожухом. Корпус может быть выполнен с возможностью обеспечения безопасного, корректного и/или легко осуществимого манипулирования устройством и/или его зашиты от вредных жидкостей, пыли или грязи. Корпус может представлять собой цельный или составной компонент трубчатой или нетрубчатой формы. В корпусе может располагаться картридж, из которого могут выдаваться дозы лекарственного вещества. В частности, корпус может иметь форму шприца-ручки.
Термин «дистальный конец» относится к той части корпуса или кожуха, которая должна располагаться на участке устройства доставки лекарственного вещества, из которого выдается лекарственное вещество. Термин «проксимальный конец» относится к той части корпуса или кожуха, которая находится на удалении от дистального конца. Термин «дистальное направление» относится к перемещению в том же направлении, в котором осуществляется перемещение от проксимального конца к дистальному концу, не выделяя ни исходной точки, ни конечной точки, так что перемещение может выполняться за дистальный конец. Термин «проксимальное направление» относится к перемещению в направлении, противоположном дистальному направлению.
Термин «ходовой винт» охватывает любой элемент цельной или составной конструкции, предназначенный для передачи движения поршню, работающий, таким образом, в качестве штока поршня, в частности, с целью выдачи лекарственного вещества. Ходовой винт может быть гибким или негибким.
Приводной механизм может использоваться для выведения лекарственного вещества из резервуара или картриджа, вставленного в корпус устройства доставки лекарственного вещества. Устройство доставки лекарственного вещества может представлять собой устройство одноразового или многоразового применения, выполненное с возможностью выдачи дозы лекарственного вещества, в особенности жидкости, например, инсулина, гормона роста, гепарина или их аналога и/или их производной. Лекарственное вещество может вводиться иглой, либо устройство может не иметь иглы. Кроме того, устройство может быть выполнено с возможностью контроля физиологических характеристик, например, уровня содержания глюкозы в крови. При всяком смещении ходового винта в дистальном направлении относительно корпуса из устройства доставки лекарственного вещества выводится определенное количество лекарственного вещества.
Термин «лекарственное вещество» в настоящем описании предпочтительно означает фармацевтическую композицию, содержащую, по меньшей мере, одно фармацевтически активное соединение,
при этом в одном варианте осуществления фармацевтически активное соединение имеет молекулярный вес до 1500 Da и/или представляет собой пептид, протеин, полисахарид, вакцину, ДНК, РНК, антитело, энзим, гормон или олигонуклеотид либо смесь вышеупомянутых фармацевтически активных соединений,
при этом в следующем варианте осуществления фармацевтически активное соединение является полезным для лечения и/или профилактики сахарного диабета или осложнений, связанных с сахарным диабетом, таких как диабетическая ретинопатия, тромбоэмболийные осложнения, такие как тромбоз глубоких вен или легочная тромбоэмболия, острый коронарный синдром (ACS), ангина, инфаркт миокарда, злокачественные новообразования, дегенерация макулы, воспалительные заболевания, поллиноз, атеросклероз и/или ревматоидный артрит,
при этом в следующем варианте осуществления фармацевтически активное соединение содержит, по меньшей мере, один пептид для лечения и/или профилактики сахарного диабета или осложнений, связанных с сахарным диабетом, таких как диабетическая ретинопатия,
при этом в следующем варианте осуществления фармацевтически активное соединение содержит, по меньшей мере, один инсулин человека или аналог инсулина человека или производную, глюкагоноподобный пептид (GLP-1) либо аналог или его производную, или экседин-3, или экседин-4, либо аналог или производную экседина-3 или экседина-4.
Аналоги инсулина могут представлять собой, например, Gly(A21), Arg(B31), Arg(B32) человеческий инсулин; Lys(B3), Glu(B29) человеческий инсулин; Lys(B28), Pro(B29) человеческий инсулин; Asp(B28) человеческий инсулин; человеческий инсулин, при этом пролин в позиции B28 замещается на Asp, Lys, Leu, VaL или Ala, а в позиции B29 Lys может быть замещен на Pro; Ala(B26) человеческий инсулин; Des(B28-B30) человеческий инсулин; Des(B27) человеческий инсулин и Des(B30) человеческий инсулин.
Производные инсулина могут представлять собой, например, B29-N-миристоил-дез(B30) человеческий инсулин; B29-N-палмитоил - дез(B30) человеческий инсулин; B29-N-миристоил человеческий инсулин; B29-N-палмитоил человеческий инсулин; B28-N-миристоил LysB28ProB29 человеческий инсулин; B28-N-палмитоил - LysB28ProB29 человеческий инсулин; B30-N-миристоил -ThrB29LysB30 человеческий инсулин; B30-N-палмитоил - ThrB29LysB30 человеческий инсулин; B29-N-(N-палмитоил-Y-глутамил)-дез(B30) человеческий инсулин; B29-N-(N-литохолил-Y-глутамил)-дез(B30) человеческий инсулин; B29-N-(ω-карбоксигептадеканоил)-дез(B30) человеческий инсулин и B29-N-(ω-карбоксигептадеканоил) человеческий инсулин.
Эксендин-4, например, означает Экседин-4(1-39), последовательность пептидов H-His-Gly-Glu-Gly-Thr-Phe-Thr-Ser-Asp-Leu-Ser-Lys-GIn-Met-Glu-Glu-Glu-Ala-Val-Arg-Leu-Phe-Ile-Glu-Trp-Leu-Lys-Asn-Gly-Gly-Pro-Ser-Ser-Gly-Ala-Pro-Pro-Pro-Ser-NH2.
Производные Экседина-4, например, выбираются из следующего списка соединений:
H-(Lys)4-дез Pro36, дез Pro37 Эксендин-4(1-39)-NH2,
H-(Lys)5-дез Pro36, дез Pro37 Эксендин-4(1-39)-NH2, дез Pro36 [Asp28] Эксендин-4(1-39), дез Pro36 [lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] Эксендин-4(1-39); или
дез Pro36 [Asp28] Эксендин-4(1-39), дез Pro36 [lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1 -39), дез Pro36 [Trp(O2)25, lsoAsp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, Asp28] Эксендин-4(1-39), дез Pro36 [Met(O)14 Trp(O2)25, lsoAsp28] Эксендин-4(1-39), где группа -Lys6-NH2 может быть связана с C-концом производной Эксендина-4;
либо производная Эксендина-4 последовательности H-(Lys)6- дез Pro36 [Asp28] Эксендин-4(1-39)-Lys6-NH2, дез Asp28 Pro36, Pro37, Pro38 Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro38 [Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36 [Trp(O2)25, Asp28] Эксендин-4(1-39)-Lys6-NH2, H-дез Asp28 Pro36, Pro37, Pro38 [Trp(O2)25] Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-дез Pro36 [Met(O)14, Asp28] Эксендин-4(1-39)-Lys6-NH2, дез Met(O)14 Asp28 Pro36, Pro37, Pro38 Эксендин-4(1-39)-NH2, H-(Lys)6-дезPro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2,
H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2, H-Asn-(Glu)5 дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-(Lys)6-NH2,
H-Lys6-дез Pro36 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-Lys6-NH2, H-дез Asp28 Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25] Эксендин-4(1-39)-NH2, H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Asp28] Эксендин-4(1-39)-NH2, H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-NH2, дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2,
H-(Lys)6-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(S1-39)-(Lys)6-NH2,
H-Asn-(Glu)5-дез Pro36, Pro37, Pro38 [Met(O)14, Trp(O2)25, Asp28] Эксендин-4(1-39)-(Lys)6-NH2;
либо фармацевтически приемлемые соль или сольват любой из вышеупомянутых производных Эксендина-4.
Гормоны представляют собой, например, гормоны гипофиза или гормоны гипоталамуса, или регуляторные активные пептиды и их антагонисты согласно списку в Rote Liste, ed. 2008, Chapter 50, такие как гонадотропин (фоллитропин, лютропин, хорионгонадотропин, менотропин), соматропин (соматропин), десмопрессин, терлипрессин, гонадорелин, трипторелин, леупрорелин, бусерилин, нафарелин, гозерелин.
Полисахарид может представлять собой, например, глюкозаминогликан, гиалуроновую кислоту, гепарин, низкомолекулярный гепарин или сверхнизкомолекулярный гепарин, либо их производные, либо сульфатированная, например, полисульфатированная форма вышеупомянутых полисахаридов, и/или фармацевтически приемлемые их соли. Примером фармацевтически приемлемой соли полисульфатированного низкомолекулярного гепарина служит эноксапарин натрий.
Фармацевтически приемлемые соли представляют собой, например, соли присоединения кислоты и основные соли. Солями присоединения кислоты являются, например, соли HCl или HBr. Основными солями являются, например, соли, имеющие катион, выбранный из alkali или alkaline, например Na+ или K+, или Ca2+, ион аммония N+(R1)(R2)(R3)(R4), где R1-R4 независимо друг от друга означают водород, замененную C1-C6-алкильную группу, замененную C2-C6-алкенильную группу, замененную C6-C10-арильную группу или замененную C6-C10-гетероарильную группу. Дополнительные примеры фармацевтически приемлемых солей описаны в "Remington's Pharmaceutical Sciences" 17. ed. Alfonso R. Gennaro (Ed.), Mark Publishing Company, Easton, Pa., U.S.A., 1985 и в Энциклопедии фармацевтических технологий (Encyclopedia of Pharmaceutical Technology).
Примером фармацевтически приемлемых сольватов служат гидраты.
Далее приводится более подробное описание примеров и вариантов осуществления приводного механизма со ссылкой на прилагаемые чертежи.
На фигуре 1 показан вид в перспективе сечения шприца-ручки, содержащей вариант осуществления приводного механизма.
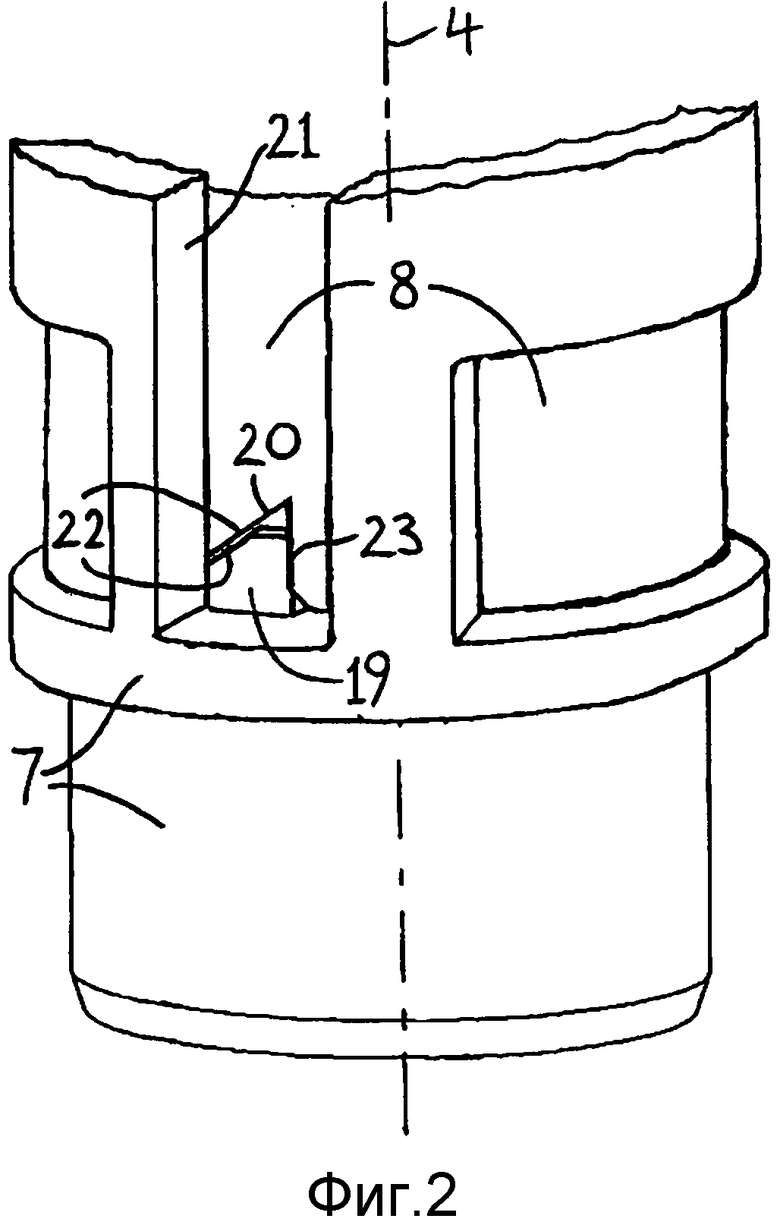
На фигуре 2 показан детальный вид стопорных элементов выдачи ведущего звена и гайки ходового винта.
На фигуре 3 показан увеличенный вид дистального конца ходового винта.
На фигуре 1 показан вид в разрезе шприца-ручки, содержащей приводной механизм. Приводной механизм расположен в корпусе 1, имеющем дистальный конец 2 и проксимальный конец 3. Ходовой винт 5 расположен вдоль оси 4 устройства. Винтовая резьба 6 ходового винта 5 соединена с приводным элементом гайки 7 ходового винта, находящимся в зацеплении с винтовой резьбой 6, чтобы направлять винтовое перемещение ходового винта 5 относительно гайки 7 ходового винта. В дополнительных вариантах осуществления винтовая резьба и приводной элемент могут «поменяться местами», так что ходовой винт оборудован дискретными приводными элементами, а гайка ходового винта оснащена винтовой резьбой. Гайка 7 ходового винта вращательно зафиксирована относительно корпуса 1.
Вариант осуществления, показанный на фигуре 1, содержит ведущее звено 8, которым может управлять пользователь посредством кнопки 9, расположенной на проксимальном конце 3 и выступающей из корпуса 1. Ведущее звено 8 соединено или находится в зацеплении с ходовым винтом 5. В данном варианте осуществления это достигается посредством винтовой резьбы 18 ведущего звена 8 и гибкого направляющего элемента 15 ходового винта 5. Ведущее звено 8, в частности, может представлять собой ведущую муфту, по существу, цилиндрической формы, при этом ось ведущей муфты расположена параллельно оси 4 устройства. Ходовой винт 5 может быть выполнен с возможностью захода в ведущее звено 8.
В качестве держателя картриджа может быть предусмотрена съемная и присоединяемая часть 11 корпуса 1. Когда эта часть 11 удалена из остальной части корпуса 1, можно ввести картридж 12. Когда часть 11 присоединена к корпусу 1, ходовой винт 5 приходит в соприкосновение с поршнем 13, выполненным с возможностью выведения лекарственного вещества из картриджа 12. Между ходовым винтом 5 и поршнем 13 может быть установлена опора 14, чтобы не допустить какого-либо повреждения, вызванного относительным перемещением между ходовым винтом 5 и поршнем 13. Ходовой винт 5 функционирует в качестве штока поршня для продвижения поршня 13 в дистальном направлении.
В процессе доставочной операции ходовой винт 5 совершает винтовое перемещение в дистальном направлении относительно корпуса 1. Ходовой винт 5 направляется гайкой 7 ходового винта, находящейся в зацеплении с винтовой резьбой 6 ходового винта 5. Стопорные элементы 17 (показанные на фигуре 3, описанной ниже) предусмотрены в винтовой резьбе 6 ходового винта 5 для обеспечения установочной операции, с помощью которой может быть предварительно установлена выдаваемая фиксированная доза. С этой целью ведущее звено 8 оттягивается в проксимальном направлении относительно корпуса 1 и ходового винта 5. Ведущее звено 8 соединено с ходовым винтом 5. В варианте осуществления, показанном на фигуре 1, соединение достигается с помощью винтовой резьбы 18 ведущего звена 8 и гибкого направляющего элемента 15 ходового винта 5. В процессе установочной операции ходовой винт 5 не должен перемещаться. Следовательно, зацепление между ведущим звеном 8 и ходовым винтом 5 в ходе установочной операции временно разблокируется. Это может достигаться путем деформирования гибкого направляющего элемента 15, чтобы заблокировать управляющее действие винтовой резьбы 18 ведущего звена 8. Несмотря на зацепление между ведущим звеном 8 и ходовым винтом 5, ведущее звено 8, таким образом, может перемещаться, не совершая вращения, в то время как ходовой винт 5 остается неподвижным относительно корпуса. Устранение зацепления между ведущим звеном 8 и ходовым винтом 5 реализуется с помощью гибкого направляющего элемента 15, который может быть изогнут в направлении центральной оси 4. Вращение ведущего звена 8 относительно корпуса 1 можно предотвратить с помощью направляющих элементов 10, которые, например, могут представлять собой выступающие элементы корпуса 1, входящие в зацепление с аксиальной канавкой в наружной поверхности ведущего звена 8.
После того как ведущее звено 8 переместилось на расстояние, соответствующее шагу винтовой резьбы 18 ведущего звена 8, гибкий направляющий элемент 15 ходового винта 5 повторно зацепляется с винтовой резьбой 18 ведущего звена 8, после чего пользователь может продвинуть ходовой винт 5 путем проталкивания ведущего звена 8 обратно в дистальном направлении. Данный способ работы путем расцепления и повторного зацепления ходового винта 5 с ведущим звеном 8 всецело основан на том, что ходовой винт 5 остается, по существу, неподвижным в ходе установочной операции. Если бы ходовой винт 5 совершал вращение или перемещался аксиально в процессе установки дозы, ведущее звено 8 с большой вероятностью могло войти в повторное зацепление с ходовым винтом 5 неверно, что привело бы к неточной дозировке. Следовательно, гайка 7 ходового винта, направляющая винтовое перемещение ходового винта 5 относительно корпуса 1, вращательно зафиксирована относительно корпуса 1, по меньшей мере, в процессе операции выдачи, а кроме того, ходовой винт 5 оснащен стопорными элементами, препятствующими вращению ходового винта 5 так, что вращение подавляется в тех положениях ходового винта 5, которые он принимает после доставки дозы и перед установкой новой дозы. Вращение ходового винта 5, таким образом, блокируется относительно гайки 7 ходового винта, при этом вращение гайки 7 ходового винта относительно корпуса 1 не допускается. Следовательно, когда ведущее звено 8 оттягивается в проксимальном направлении, относительное линейное перемещение между ведущим звеном 8 и ходовым винтом 5 приводит к устранению зацепления ведущего звена и неподвижного ходового винта 5, а значит к устранению зацепления между ведущим звеном 8 и ходовым винтом 5. Стопорные элементы, таким образом, предпочтительно расположены, по меньшей мере, на дистальной боковой стенке винтовой резьбы 6 ходового винта 5, в то время как на своей проксимальной боковой стенке винтовая резьба 6 может быть гладкой, образуя спираль. При проталкивании ведущего звена 8 в дистальном направлении направляющее средство гайки 7 ходового винта, входящей в зацепление с винтовой резьбой 6 ходового винта 5, продолжает соприкасаться с гладкой проксимальной боковой стенкой винтовой резьбы 6, тем самым обеспечивая плавное винтовое перемещение ходового винта 5, совершающего скольжение через отверстие гайки 7 ходового винта. Таким образом, стопорные элементы не препятствуют относительному перемещению ходового винта 5 относительно гайки 7 ходового винта в ходе операции по выдаче дозы.
Стопорные элементы, в частности, могут обеспечиваться выемками винтовой канавки, образующей винтовую резьбу 6 ходового винта 5. Выемки могут иметь контактные поверхности, расположенные поперечно оси 4 и прерывающие гладкую спираль соответствующей боковой стенки канавки, образующей винтовую резьбу 6. Контактные поверхности, в частности, могут представлять собой плоские участки, по существу перпендикулярные оси 4 или, по меньшей мере, имеющие нулевой угол спирали, однако могут содержать угол наклона в радиальном направлении. Приводной элемент гайки 7 ходового винта может быть выполнен так, что он заходит в выемки и стопорится на контактной поверхности. Когда приводной элемент гайки 7 ходового винта приходит в соприкосновение с одним из плоских участков, в целом перпендикулярное расположение плоского участка относительно оси 4 приводит к тому, что управление винтовым перемещением ходового винта 5 относительно корпуса 1 завершается. Может оказаться предпочтительным, чтобы приводной элемент гайки 7 ходового винта, входящий в зацепление с винтовой резьбой 6 ходового винта 5 и застопоренный в выемках, содержал один или более индивидуальных приводных элементов, а не был образован полностью непрерывной спиралью. Стопорные элементы расположены таким образом, что после того как доза лекарственного вещества полностью выдана и устройство готово для установки следующей дозы, один из стопорных элементов находится в положении, в котором он готов остановить вращение ходового винта 5, когда ведущее звено 8 оттягивается в проксимальном направлении. Аксиальная нагрузка, прикладываемая к ходовому винту 5, далее компенсируется приводным элементом гайки 7 ходового винта, входящим в зацепление с соответствующим стопорным элементом, в частности соприкасаясь, по существу, с плоским участком соответствующей выемки. Это приводит к блокированию вращения ходового винта 5, а не к его вращению, поскольку гайка 7 ходового винта вращательно зафиксирована относительно корпуса 1, по меньшей мере, в ходе операций по установке и выдаче дозы. По существу, плоские поверхности на винтовой резьбе 6 выполнены с возможностью предотвращения обратного хода ходового винта 5 в процессе операции по установке дозы. Движение ходового винта 5, таким образом, можно ограничить перемещением лишь в дистальном направлении.
На фигуре 2 показан увеличенный детальный вид расположения гайки 7 ходового винта и ведущего звена 8. В варианте осуществления, показанном на фигуре 2, стопорный элемент 19 выдачи гайки 7 ходового винта имеет форму усеченной призмы. Поверхность элемента 19 выдачи наклонена к оси 4 и обращена к соответствующему стопорному элементу 20 выдачи ведущего звена 8, оснащенного треугольной выемкой, согласующейся со стопорным элементом 19 выдачи гайки 7 ходового винта. Такая форма стопорных элементов 19, 20 выдачи в особенности предпочтительна, поскольку подавляются как вращательное, так и чисто аксиальное перемещение ведущего звена 8. Стопорные элементы 19, 20 выдачи, таким образом, способствуют гарантии того, что при каждом срабатывании устройства выдаются точные дозы лекарственного вещества. Для достижения точности доз принципиально важно, чтобы аксиальное и поворотное положения ведущего звена 8 относительно гайки 7 ходового винта были одинаковыми в конце каждой выдачи дозы. Геометрия стопорных элементов 19, 20 выдачи выполнена с возможностью достижения этого.
В варианте осуществления согласно фигуре 2 стопорные элементы 19, 20 выдачи имеют форму прямоугольных треугольников, при этом гипотенуза каждого треугольника расположена наклонно к оси 4 и соответствует углу спирали внутренней резьбы 18 ведущего звена 8, образуя, таким образом, соответствующие контактные поверхности 22, имеющие наклон к оси 4. Поверхности, соответствующие стороне треугольника, расположены вдоль оси 4 и созданы в качестве концевых поверхностей 23 для подавления вращения ведущего звена 8 относительно гайки 7 ходового винта в направлении вращения ходового винта 5 в процессе доставки лекарственного вещества. Это означает, что когда ведущее звено 8 аксиально зацеплено с гайкой 7 ходового винта посредством стопорных элементов 19, 20 выдачи, оно направляется вдоль винтовой траектории, пока концевые поверхности 23 треугольных стопорных элементов 19, 20 выдачи не войдут в зацепление, тем самым гарантируя, что конечное положение ведущего звена 8 точно контролируется как аксиально, так и вращательно. Поскольку угол расположения гипотенузы 22 треугольных стопорных элементов 19, 20 выдачи согласуется с углом спирали резьбы 18 ведущего звена 8, это также гарантирует, что ходовой винт 5 не будет приведен в движение ведущим звеном 8, когда стопорные элементы 19, 20 выдачи находятся в соприкосновении. Когда ведущее звено 8 приближается к своему заданному конечному положению, стопорные элементы 19, 20 выдачи принудительно перемещают ведущее звено 8 в спираль, соответствующую спирали резьбы 18, так что перемещение ведущего звена 8 не изменяет положения ходового винта 5. Таким образом, конец доставки лекарственного вещества определяется с весьма высокой точностью.
На фигуре 2 показано аксиальное отверстие гайки 7 ходового винта. Это отверстие или зазор может использоваться в качестве направляющего элемента 21, обеспечивающего, например, блокировку вращения гайки 7 ходового винта относительно корпуса 1. Могут обеспечиваться и другие средства блокировки.
На фигуре 3 показан увеличенный подробный вид дистального конца ходового винта 5. В данном варианте осуществления ходовой винт 5 содержит винтовую резьбу 6, а также дополнительную винтовую резьбу 16, которые переплетены и снабжены отдельными заходами («двухзаходная» резьба). Гайка 7 ходового винта входит в зацепление с винтовыми резьбами 6, 16 ходового винта 5. Стопорные элементы 17 могут быть созданы на одной винтовой резьбе 6 или на обеих винтовых резьбах 6, 16. Шаг винтовых резьб 6, 16 может быть адаптирован к шагу резьбы 18 ведущего звена 8, чтобы обеспечить требуемое соотношение скоростей продвижения ходового винта 5 и ведущего звена 8.
Стопорные элементы 19, 20 выдачи гайки 7 ходового винта и ведущего звена 8 повышают точность дозирования и не допускают некорректной дозировки, которая может иметь место вследствие механических люфтов компонентов устройства. Поскольку стопорные элементы 19, 20 выдачи могут быть образованы в виде деталей, составляющих одно целое с гайкой 7 ходового винта и ведущим звеном 8, изготовление упрощается и дополнительных компонентов не требуется.
ССЫЛОЧНЫЕ ПОЗИЦИИ
1 - корпус
2 - дистальный конец
3 - проксимальный конец
4 - ось
5 - ходовой винт
6 - винтовая резьба
7 - гайка ходового винта
8 - ведущее звено
9 - кнопка
10 - направляющий элемент
11 - съемная и присоединяемая часть корпуса
12 - картридж
13 - поршень
14 - опора
15 - гибкий направляющий элемент
16 - стопорный элемент выдачи
17 - стопорный элемент
18 - винтовая резьба
19 - стопорный элемент выдачи
20 - стопорный элемент выдачи
21 - направляющий элемент
22 - контактная поверхность
23 - концевая поверхность

Группа изобретений относится к медицинской технике. В приводном механизме ходовой винт, гайка ходового винта, а также ведущее звено выровнены по оси, определяющей аксиальное направление и противоположное аксиальное направление. Соединение между ходовым винтом и гайкой ходового винта позволяет ходовому винту совершать винтовое перемещение относительно гайки ходового винта, по меньшей мере, в аксиальном направлении. Ходовой винт соединен с ведущим звеном, при этом соединение создает винтовое перемещение ходового винта относительно ведущего звена, когда ведущее звено перемещается в аксиальном направлении относительно ходового винта. Стопорный элемент выдачи гайки ходового винта и стопорный элемент выдачи ведущего звена предотвращают создание винтового перемещения ходового винта при приближении к заданному концевому положению ведущего звена. 2 н. и 7 з.п. ф-лы, 3 ил.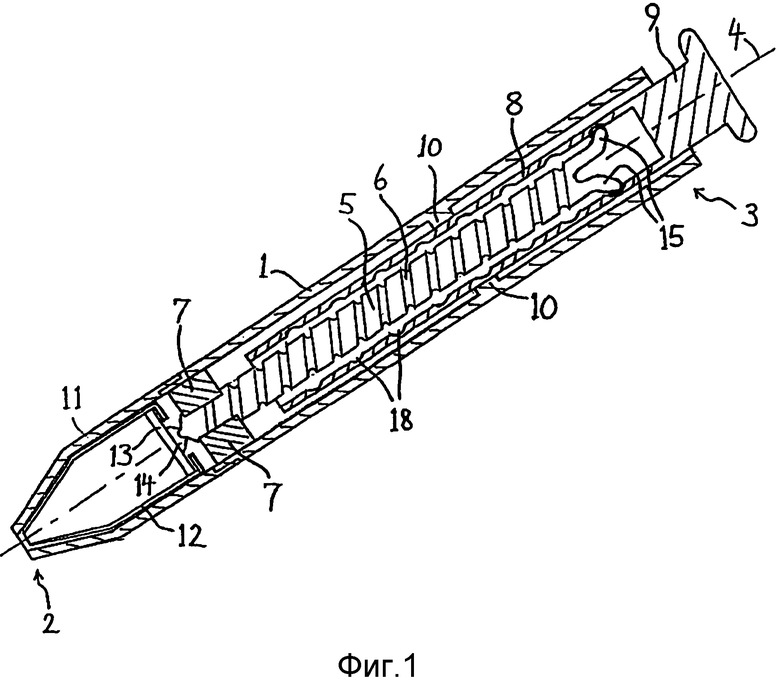
1. Приводной механизм для устройства доставки лекарственного вещества, содержащий:
- ходовой винт (5), гайку (7) ходового винта, а также ведущее звено (8), выровненные по оси (4), определяющей аксиальное направление и противоположное аксиальное направление,
- соединение между ходовым винтом (5) и гайкой (7) ходового винта, обеспечивающее винтовое перемещение ходового винта (5) относительно гайки (7) ходового винта, по меньшей мере, в аксиальном направлении,
- при этом ходовой винт (5) соединен с ведущим звеном (8), причем соединение создает винтовое перемещение ходового винта (5) относительно ведущего звена (8), когда ведущее звено (8) перемещается в аксиальном направлении относительно ходового винта (5), при этом данное соединение отключается для предотвращения винтового перемещения ходового винта (5) относительно ведущего звена (8), когда ведущее звено (8) перемещается в противоположном аксиальном направлении относительно ходового винта (5),
- стопорный элемент (19) выдачи гайки (7) ходового винта, а также
- стопорный элемент (20) выдачи ведущего звена (8),
причем стопорные элементы (19, 20) предназначены для выдачи точной дозы лекарства в рамках одного приведения в действие приводного механизма путем взаимодействия и предотвращения, тем самым, винтового перемещения ходового винта (5) при приближении ведущего звена (8) к заданному концевому положению, причем
стопорные элементы (19, 20) выдачи имеют контактные поверхности (22), наклонные по отношению к оси (4).
2. Приводной механизм по п. 1, в котором
стопорные элементы (19, 20) выдачи имеют концевые поверхности (23), препятствующие вращению ведущего звена (8) относительно гайки (7) ходового винта по меньшей мере в одном направлении.
3. Приводной механизм по п. 1, в котором
стопорный элемент (19) выдачи гайки (7) ходового винта имеет форму призмы или усеченной призмы.
4. Приводной механизм по п. 1, в котором
стопорные элементы (19, 20) выдачи направляют ведущее звено (8) относительно гайки (7) ходового винта при совершении винтового перемещения, имеющего тот же шаг, что и винтовое перемещение ходового винта (5) относительно ведущего звена (8).
5. Приводной механизм по п. 1, дополнительно содержащий:
гибкий направляющий элемент (15) ходового винта (5), а также
винтовую резьбу (18) ведущего звена (8), при этом
соединение ходового винта (5) с ведущим звеном (8) обеспечивается гибким направляющим элементом (15), входящим в зацепление с винтовой резьбой (18), при этом
винтовая резьба (18) имеет тот же шаг, что и винтовое перемещение ходового винта (5) относительно ведущего звена (8).
6. Приводной механизм по п. 1, дополнительно содержащий:
стопорные элементы (17) ходового винта (5),
при этом стопорные элементы (17) препятствуют винтовому
перемещению ходового винта (5), когда ведущее звено (8) перемещается в противоположном аксиальном направлении относительно ходового винта (5).
7. Приводной механизм по п. 1, в котором
ведущее звено (8) и гайка (7) ходового винта заблокированы от вращательного движения относительно друг друга.
8. Приводной механизм по п. 1, в котором
стопорный элемент (19) выдачи гайки (7) ходового винта выполнен как одно целое с гайкой (7) ходового винта, при этом
стопорный элемент (20) выдачи ведущего звена (8) выполнен как одно целое с ведущим звеном (8).
9. Устройство доставки лекарственного вещества, содержащее:
- приводной механизм по одному из пп. 1-8, а также
- корпус (1), имеющий дистальный конец (2) и проксимальный конец (3), разнесенные в направлении оси (4).
| EP1923085A1, 21.05.2008 | |||
| WO2008058665A1, 22.05.2008 | |||
| СПОСОБ ПРОИЗВОДСТВА ШТРИПСОВ ИЗ НИЗКОЛЕГИРОВАННОЙ СТАЛИ | 2001 |
|
RU2201972C2 |
| US2009275914A1, 05.11.2009 | |||
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО С РЕДУКТОРОМ | 2001 |
|
RU2270698C2 |

