Изобретение относится к области вооружений и может быть использовано для создания высокоточных боевых комплексов.
Известен самоприцеливающийся боевой элемент (СПБЭ), содержащий корпус с боевым элементом, вращающий парашют с полюсным отверстием, выдвижные тормозные щитки, установленные перпендикулярно продольной оси корпуса.
Указанный СПБЭ работает следующим образом. При сбросе СПБЭ в заданной точке траектории полета реактивного снаряда вращающийся парашют вводится в набегающий воздушный поток. СПБЭ переходит в устойчивый полет благодаря стабилизирующему моменту вращающегося парашюта. Далее происходит выдвижение тормозных щитков в рабочее положение. За счет совместного действия щитков и парашюта происходит уменьшение скорости движения элемента до заданной величины. Одновременно с этим происходит вращение боевого элемента, датчик которого совершает обзор местности в поиске цели. При детектировании цели происходит срабатывание боевого элемента (Патент РФ №2451262, опубл. 20.05.2012, МПК: F42B 15/00, F42B 10/50).
Основным недостатком указанного СПБЭ является невозможность проведения развернутого автономного поиска цели. Возможное значительное отклонение от заданной точки сброса при доставке боевых элементов неуправляемыми реактивными снарядами существенно снижает вероятность обнаружения цели. Также недостатками описанного выше СПБЭ являются: низкая адаптивность процесса выбора цели, в том числе отсутствие возможности расширения зоны поиска цели, существенное снижение эффективности боевого применения за счет недостаточной точности
нанесения ударного воздействия в заданную точку наиболее уязвимой зоны цели.
Известен боеприпас для осуществления способа поражения легкобронированной техники и живой силы. Боеприпас выполнен в виде контейнера с крышкой. В нем размещены полетный модуль с твердотопливным реактивным двигателем, снабженным воспламенителем с пороховыми навесками, а также разрывные заряды, связанные системой подрыва, суббоеприпасы и датчик обнаружения цели. Реактивный двигатель размещен на вершине полетного модуля, а его периферийные сопла расположены наклонно к продольной оси боеприпаса. Суббоеприпасы со стабилизаторами размещены, по меньшей мере, в двух расположенных друг за другом за реактивным двигателем кассетных контейнерах с центральными разрывными зарядами. Часть боеприпасов в каждом контейнере помещена в дополнительную металлическую оболочку, на которой размещена система крепления суббоеприпасов. Описанное устройство работает следующим образом. Боеприпас с датчиком обнаружения цели устанавливают в землю, при обнаружении цели запускают реактивный двигатель со ступенчатым понижением силы тяги и выводят полетный модуль боеприпаса из земли. Подрывом разделяют его на суббоеприпасы и разбрасывают их под действием реактивных струй с разными горизонтальными составляющими скорости. Полет суббоеприпасов к целям стабилизируют отстрелом части их массы. (Патент РФ №2121652, опубл. 10.11.1998, МПК: F42B 23/00).
Основным недостатком указанного боеприпаса является невозможность проведения развернутого автономного поиска цели. Возможное значительное отклонение от заданной точки сброса при доставке боевых элементов неуправляемыми реактивными снарядами существенно снижает вероятность обнаружения цели. Также недостатками является существенное снижение эффективности боевого применения за счет недостаточной точности нанесения ударного воздействия в заданную точку наиболее уязвимой зоны цели.
Задачей предлагаемого изобретения является создание переносного тактического комплекса, предназначенного для поиска и поражения различного типа наземных, надводных, воздушных низколетящих целей на значительном удалении, в том числе за пределами прямой видимости, характеризующегося высокой вероятностью обнаружения цели и ее поражения за счет высокой точности прицеливания, возможности нанесения боевого воздействия в наиболее уязвимую зону цели.
Решение указанной задачи достигается тем, что предложенный переносной тактический комплекс включает выполненные каждый в отдельном корпусе функциональные модули: боевой полетный модуль, модуль управления, обеспечивающий дистанционное управление полетом по радиоканалу, полетный модуль связи, обеспечивающий устойчивый обмен данными между боевым полетным модулем и модулем дистанционного управления по радиоканалу, при этом боевой полетный модуль содержит корпус, кумулятивный боевой элемент, источник питания, устройство перемещения, обеспечивающие управляемое перемещение боевого полетного модуля в горизонтальной и вертикальной плоскостях, в том числе режим зависания, контроллер управления перемещением, навигационную систему, видеокамеру, блок приема-передачи по радиоканалу, при этом модуль управления содержит корпус, в котором размещены соединенные между собой электронный блок управления полетом боевого полетного модуля и полетного модуля связи, блок приема-передачи по радиоканалу, устройство видеоконтроля, при этом полетный модуль связи содержит корпус, источник питания, устройство перемещения, обеспечивающие управляемое перемещение модуля связи в горизонтальной и вертикальной плоскостях, в том числе режим зависания, контроллер управления перемещением, навигационную систему, блок приема-передачи сигналов по радиоканалу.
В варианте исполнения боевой полетный модуль содержит видеокамеру инфракрасного диапазона.
В варианте исполнения боевой полетный модуль содержит механизм наведения, обеспечивающий возможность качания боевого элемента во взаимно перпендикулярных вертикальных плоскостях.
В варианте исполнения боевой полетный модуль содержит механизм наведения, обеспечивающий возможность качания боевого элемента в вертикальной плоскости и поворота в горизонтальной плоскости.
В варианте исполнения устройство перемещения боевого полетного модуля и полетного модуля связи включает два электропривода, предпочтительно более двух, при этом на вал каждого электропривода установлен воздушный винт, причем на вал привода установлена втулка, с которой шарнирно соединены лопасти воздушного винта, таким образом, что обеспечивается установка лопастей винта в рабочее положение под действием центробежных сил при вращении вала привода.
В варианте исполнения в боевом полетном модуле и полетном модуле связи электроприводы с установленными винтами размещены на консолях, предпочтительно равномерно вокруг вертикальной оси соответствующего модуля.
В варианте исполнения консоли выполнены трансформируемыми, при этом один конец каждой консоли закреплен на корпусе полетного модуля, а на другом конце консоли размещен электропривод, при этом узел крепления консоли к корпусу модуля выполнен таким образом, что обеспечивается трансформация положения консоли из транспортного, при котором консоль предпочтительно расположена вдоль продольной оси полетного модуля, в боевое положение, при котором плоскость вращения воздушного винта расположена предпочтительно под углом <90° в вертикальной плоскости к продольной оси полетного модуля.
В варианте исполнения боевой полетный модуль и модуль связи содержат стопорные элементы, обеспечивающие фиксацию лопастей винта в транспортном положении консоли, при этом лопасти в фиксированном положении расположены предпочтительно вдоль консоли.
В варианте исполнения стопорные элементы, обеспечивающие фиксацию лопастей воздушного винта, размещены на консолях.
В варианте исполнения переносной тактический комплекс включает два или более носимых транспортных контейнера, в которых размещены, при транспортировке, боевой полетный модуль, полетный модуль связи, модуль управления, при этом каждый транспортный контейнер содержит элементы крепления функциональных модулей во внутреннем объеме контейнера, обеспечивающие фиксацию функциональных модулей при транспортировании, при этом кожух контейнера выполнен таким образом, что обеспечивает защиту носимого объекта от внешних повреждений в служебном обращении.
В варианте исполнения боевой полетный модуль содержи, соединенный с контроллером управления перемещением координатор цели, включающий электронный блок, соединенный с оптическим инфракрасным датчиком цели.
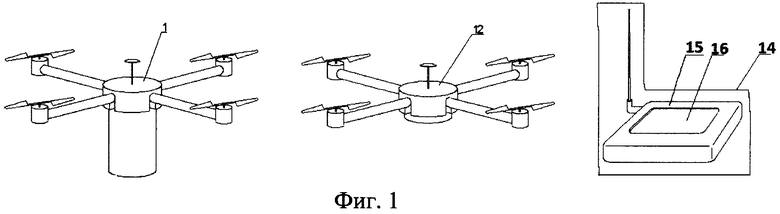
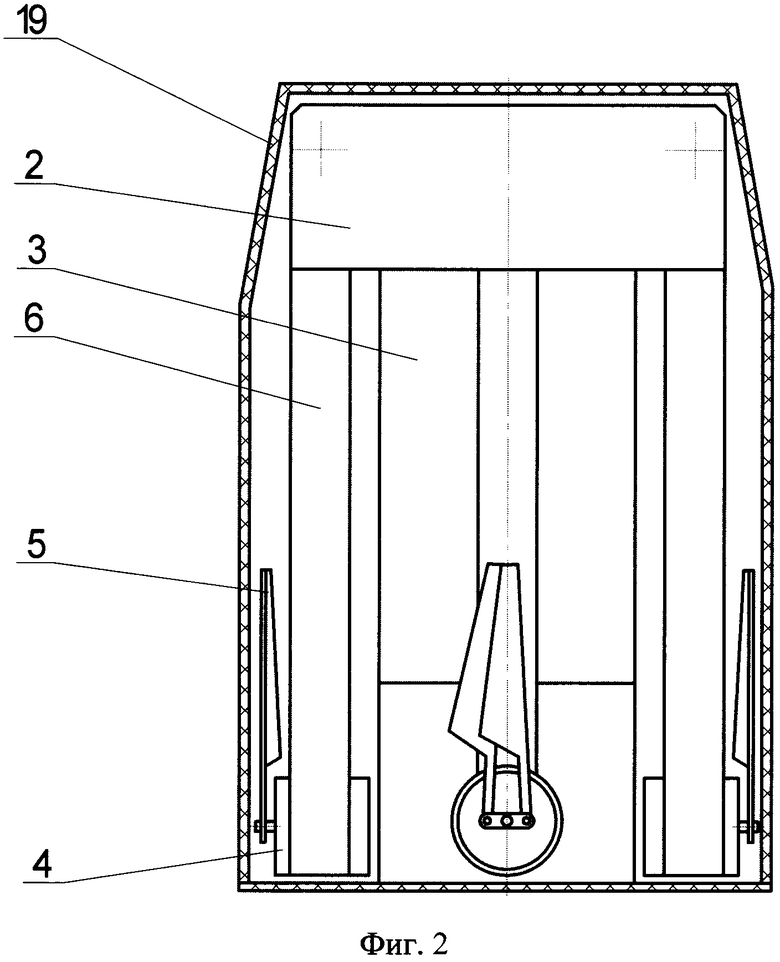
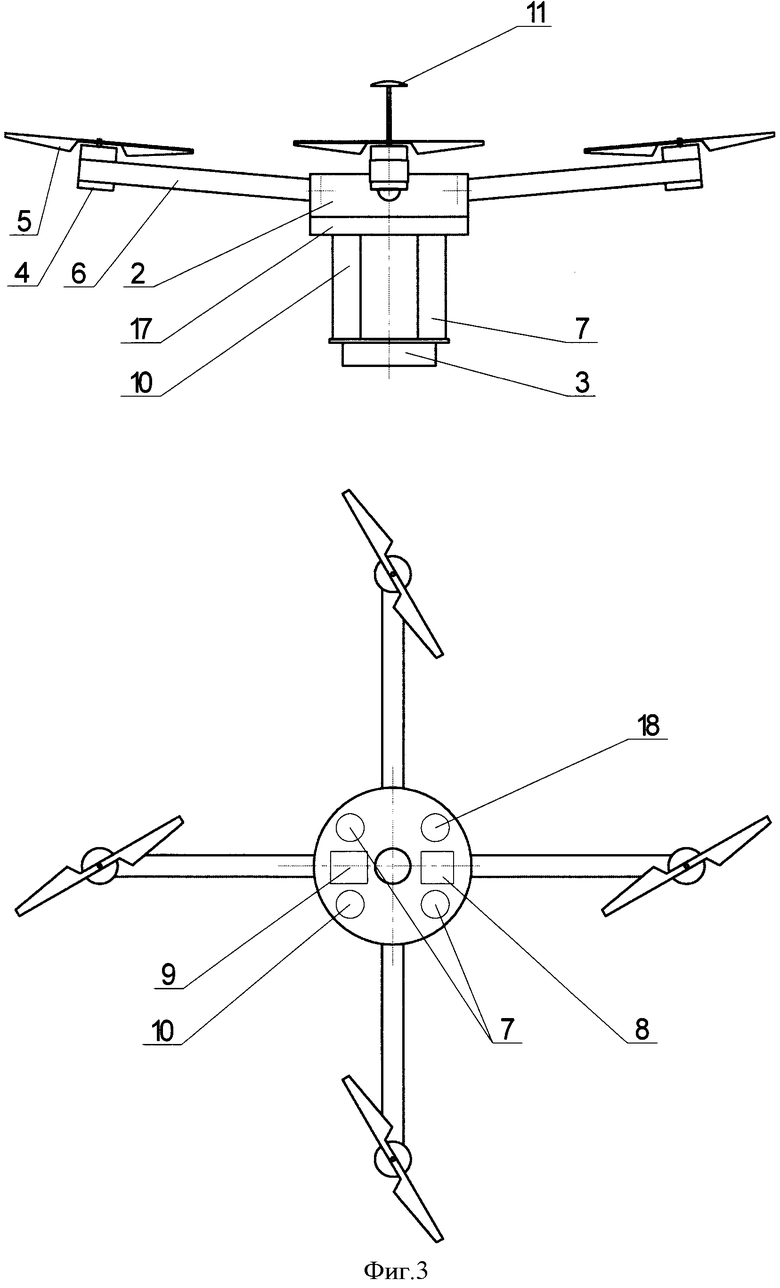
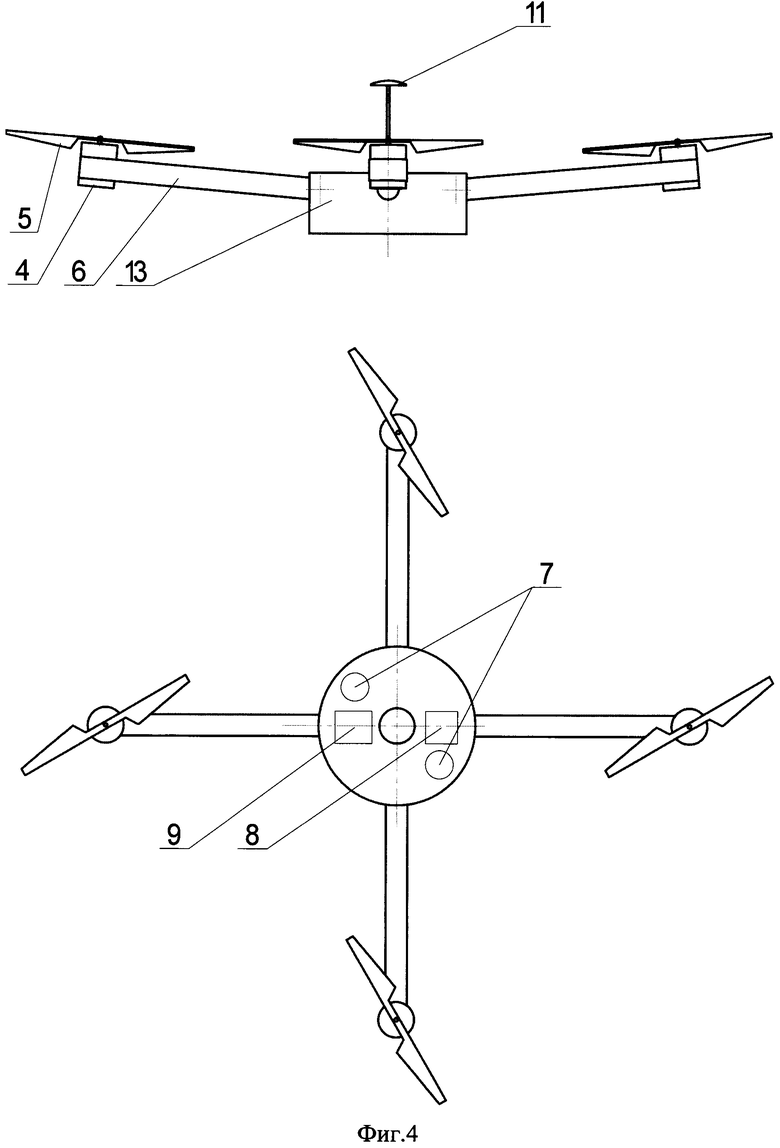
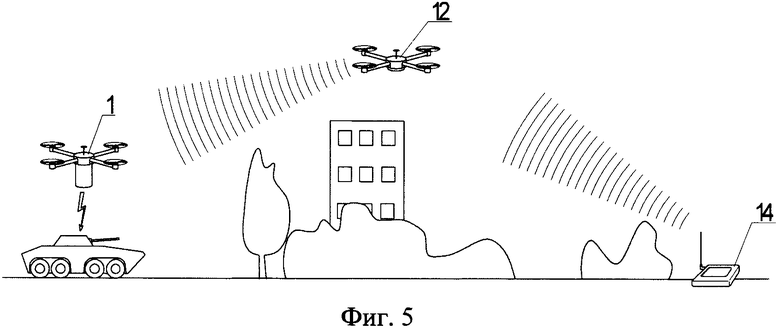
Сущность изобретения иллюстрируется чертежами, где на фиг. 1 показан общий вид переносного тактического комплекса; на фиг. 2 показан боевой полетный модуль в транспортном положении; на фиг. 3 показана конструктивная схема боевого полетного модуля; на фиг. 4 показана конструктивная схема полетного модуля связи; на фиг. 5 показана схема функционального применения переносного тактического комплекса.
В состав переносного тактического комплекса входят: боевой полетный модуль 1, который включает корпус 2, кумулятивный боевой элемент 3, устройство перемещения, включающее предпочтительно более двух винтомоторных групп, состоящих из электропривода 4 с воздушным винтом 5, размещенных на консолях 6, источник питания 7, контроллер управления перемещением 8, навигационную систему 9, видеокамеру 10, блок приема-передачи 11 радиоканала;
полетный модуль связи 12, который включает корпус 13, источник питания 7, устройство перемещения, включающее предпочтительно более двух винтомоторных групп, состоящих из электропривода 4 с воздушным винтом 5, размещенных на консолях 6, контроллер управления перемещением 8, навигационную систему 9, блок приема-передачи 11 радиоканала;
модуль управления 14, который содержит корпус 15, в котором размещен электронный блок управления полетом (на чертеже не показан), включающий обособленные каналы управления боевым полетным модулем 1 и полетным модулем связи 12, блок приема-передачи (на чертеже не показан), устройство видеоконтроля 16.
В варианте исполнения боевой полетный модуль 1 содержит координатор 17, электронный блок (на чертеже не показан), соединенный с оптическим инфракрасным датчиком цели 18.
В варианте исполнения функциональные модули размещены в транспортном контейнере 19.
Функционирование переносного тактического комплекса осуществляется следующим образом. Комплекс доставляется в точку пуска. Перед применением боевой полетный модуль 1 и полетный модуль связи 12 переводятся из транспортного положения в боевое, для чего консоли 6 устанавливаются в требуемое положение, от источника питания 7 подается напряжение на электронные блоки и электрические устройства модулей. С модуля дистанционного управления полетом 14 осуществляется запуск и управление полетом боевого полетного модуля 1, затем запускается полетный модуль связи 12, осуществляющий ретрансляцию радиосигнала между боевым полетным модулем 1 и модулем дистанционного управления 14, для чего полетный модуль связи 12 размещается, преимущественно в режиме зависания, на определенной высоте и удалении от модуля дистанционного управления 14. Оператор, отслеживая перемещение боевого полетного модуля 1 на устройстве видеоконтроля 16 модуля управления 14, по сигналам, поступающим с видеокамеры 10, осуществляет поиск и идентификацию цели, осуществляет наведение на цель и инициирование кумулятивного боевого элемента 3.
В варианте применения комплекса после обнаружения и идентификации цели оператором сближение боевого полетного модуля 1 с целью, наведение на цель кумулятивного боевого элемента 3 осуществляется автономно на основании управляющих команд координатора цели.
Предложенное техническое решение позволяет расширить зону и возможности боевого применения переносного комплекса с кумулятивным боевым элементом, обеспечить высокую вероятность обнаружения цели, повысить эффективность боевого применения кумулятивного заряда за счет точности прицеливания. При этом предложенное техническое решение за счет минимизации габаритных размеров составных частей комплекса, в частности за счет возможности трансформации положения частей конструкции полетных модулей комплекса из «транспортного» в «боевое», позволяет повысить мобильность комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНЫЙ БОЕПРИПАС С КООРДИНАТОРОМ ЦЕЛИ | 2014 |
|
RU2576825C1 |
| АВТОНОМНЫЙ ТАКТИЧЕСКИЙ БОЕПРИПАС | 2014 |
|
RU2577587C1 |
| ПЕРЕНОСНОЙ ТАКТИЧЕСКИЙ БОЕПРИПАС | 2014 |
|
RU2577831C1 |
| ПРОТИВОТАНКОВАЯ МИНА | 2014 |
|
RU2576214C1 |
| КАССЕТНАЯ БОЕВАЯ ЧАСТЬ | 2014 |
|
RU2576196C1 |
| БОЕВАЯ ЧАСТЬ С КООРДИНАТОРОМ ЦЕЛИ | 2014 |
|
RU2577731C1 |
| ИНЖЕНЕРНЫЙ БОЕПРИПАС | 2014 |
|
RU2577590C1 |
| ИНЖЕНЕРНЫЙ БОЕПРИПАС С КУМУЛЯТИВНЫМ БОЕВЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2578431C1 |
| АВТОНОМНАЯ БОЕВАЯ ЧАСТЬ С КООРДИНАТОРОМ ЦЕЛИ | 2014 |
|
RU2576106C1 |
| Противотанковая мина "Стрекоза-М" с возможностью пространственного перемещения с зависанием и переворачиванием в воздухе, разведки, нейтрализации и поражения мобильных бронированных целей | 2016 |
|
RU2628351C1 |
Изобретение относится к военной технике и может быть использовано в высокоточном вооружении. Переносной тактический комплекс содержит носимые транспортные контейнеры с элементами крепления, кожухом, боевым полетным модулем (БПМ), содержащим корпус, кумулятивный боевой элемент, источник питания, устройство перемещения, контроллер управления перемещением, навигационную систему, видеокамеру инфракрасного диапазона, приемопередающий модуль радиоканала, координатор цели с электронным блоком, соединённым с оптическим инфракрасным датчиком цели, механизм наведения, модулем управления (МУ), содержащим корпус, блок приема-передачи сигналов по радиоканалу, электронный блок с независимыми каналами управления полетом БПМ и полетного модуля связи (ПМС), устройство видеоконтроля. ПМС содержит корпус, источник питания, устройство перемещения, контроллер управления перемещением, навигационную систему, блок приема-передачи сигналов по радиоканалу. Устройство перемещения БПМ и ПМС содержит электроприводы с валами со втулками и воздушными винтами, стопорные элементы, трансформируемые консоли для размещения электроприводов и стопорных элементов. Изобретение позволяет повысить боевую эффективность и мобильность комплекса. 10 з.п. ф-лы, 5 ил.
1. Переносной тактический комплекс, характеризующийся тем, что включает боевой полетный модуль, модуль управления, обеспечивающий дистанционное управление полетом, полетный модуль связи, обеспечивающий ретрансляцию сигнала между боевым полетным модулем и модулем управления, выполненные каждый в отдельном корпусе, при этом боевой полетный модуль содержит корпус, кумулятивный боевой элемент, источник питания, устройство перемещения, обеспечивающие управляемое перемещение боевого полетного модуля в горизонтальной и вертикальной плоскостях, в том числе режим зависания, контроллер управления перемещением, навигационную систему, видеокамеру, приемопередающий модуль радиоканала, причем кумулятивный боевой элемент установлен таким образом, что его продольная ось расположена предпочтительно вертикально при горизонтальном полете боевого полетного модуля, при этом модуль управления содержит корпус, в котором размещены соединенные между собой электронный блок, включающий независимые каналы управления полетом боевого полетного модуля и полетного модуля связи, блок приема-передачи сигналов по радиоканалу, устройство видеоконтроля, при этом полетный модуль связи содержит корпус, источник питания, устройство перемещения, обеспечивающие управляемое перемещение модуля связи в горизонтальной и вертикальной плоскостях, в том числе режим зависания, контроллер управления перемещением, навигационную систему, блок приема-передачи сигналов по радиоканалу.
2. Переносной тактический комплекс по п. 1, отличающийся тем, что боевой полетный модуль содержит видеокамеру инфракрасного диапазона.
3. Переносной тактический комплекс по п. 1, отличающийся тем, что боевой полетный модуль содержит механизм наведения, обеспечивающий возможность качания боевого элемента во взаимно перпендикулярных вертикальных плоскостях.
4. Переносной тактический комплекс по п. 1, отличающийся тем, что боевой полетный модуль содержит механизм наведения, обеспечивающий возможность качания боевого элемента в вертикальной плоскости и поворота в горизонтальной плоскости.
5. Переносной тактический комплекс по п. 1, отличающийся тем, что устройства перемещения боевого полетного модуля и полетного модуля связи включают по два электропривода, предпочтительно более двух, при этом на вал каждого электропривода установлен воздушный винт, причем на вал привода установлена втулка, с которой шарнирно соединены лопасти воздушного винта, таким образом, что обеспечивается установка лопастей винта в рабочее положение под действием центробежных сил при вращении вала привода.
6. Переносной тактический комплекс по п. 5, отличающийся тем, что электроприводы с установленными винтами размещены на консолях, предпочтительно равномерно вокруг вертикальной оси модуля.
7. Переносной тактический комплекс по п. 6, отличающийся тем, что консоли выполнены трансформируемыми, при этом один конец каждой консоли закреплен на корпусе полетного модуля, а на другом конце консоли размещен электропривод, при этом узел крепления консоли к корпусу модуля выполнен таким образом, что обеспечивается трансформация положения консоли из транспортного положения, при котором консоль предпочтительно расположена вдоль продольной оси полетного модуля, в боевое положение, при котором плоскость вращения воздушного винта расположена предпочтительно под углом <90°, в вертикальной плоскости, к продольной оси полетного модуля.
8. Переносной тактический комплекс по любому из пп. 6 или 7, отличающийся тем, что боевой полетный модуль и полетный модуль связи содержат стопорные элементы, обеспечивающие фиксацию лопастей винта в транспортном положении консоли, при этом лопасти в фиксированном положении расположены предпочтительно вдоль консоли.
9. Переносной тактический комплекс по п. 8, отличающийся тем, что стопорные элементы, обеспечивающие фиксацию лопастей воздушного винта, размещены на консолях.
10. Переносной тактический комплекс по п. 1, отличающийся тем, что переносной тактический комплекс включает два или более носимых транспортных контейнера, в которых размещены при транспортировке боевой полетный модуль, полетный модуль связи, модуль управления, при этом каждый транспортный контейнер содержит элементы крепления функциональных модулей во внутреннем объеме контейнера, обеспечивающие фиксацию функциональных модулей при транспортировании, причем кожух контейнера выполнен таким образом, что обеспечивает защиту носимого объекта от внешних повреждений в служебном обращении.
11. Переносной тактический комплекс по п. 1, отличающийся тем, что боевой полетный модуль содержит соединенный с контроллером управления перемещением координатор цели, включающий электронный блок, соединенный с оптическим инфракрасным датчиком цели.
| Корообдирный станок | 1927 |
|
SU6183A1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| WO 2003059735 A2, 24.07.2003 | |||
| EP 1901153 A1, 19.03.2008. | |||

