Изобретение относится к малогабаритным авиационным системам с дистанционно пилотируемыми летательными микроаппаратами для локального мониторинга урбоэкосистемы, в частности к области винтокрылых летательных аппаратов, и предназначено для фото- и видео разведки в режиме реального времени, а также биологической, химической и ядерной разведки местности и т.п.
Известны малогабаритные авиационные системы, содержащие беспилотные летательные аппараты с автономным электроприводом, передвижной контейнер и систему дистанционного управления (см., например, патент РФ №2015067, МКИ В 64 С 39/02, 1992).
Известен авиационный разведывательный комплекс, содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортововой приемопередающей аппаратурой и видеокамерой с передатчиком изображений, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображения и радионавигационной системой управления летательным аппаратом (см. патент РФ №2067952, МКИ В 64 С 39/02, 1992).
Дистанционно пилотируемый летательный аппарат (ЛА) указанного авиационного разведывательного комплекса содержит фюзеляж, на котором размещены винтовой движитель, а также рулевое управление по курсу и тангажу.
Недостатками известных комплексов являются значительные габариты и вес, что не позволяет сделать их переносными и визуально скрытными, необходимость постоянного контроля и корректировки полета ЛА оператором с поверхности Земли, что требует обучения специальным навыкам вождения; элементы управления размещены на громоздком шасси, в связи с чем невысока проходимость комплексов на местности и неудовлетворительны шумовые характеристики; низкая дальность разведки в режиме радиоуправления. Кроме того, в самом ЛА комплексов не полностью скомпенсирован реактивный момент, под действием которого аппарат вращается вокруг оси курса, следствием чего является потеря мощности. Другой недостаток ЛА связан с незащищенностью винта от механических воздействий, которые зачастую неизбежны при приземлении аппарата.
Техническим результатом настоящего изобретения является устранение или существенное уменьшение указанных недостатков, а именно существенное уменьшение габаритов и веса комплекса, что обеспечивает возможность сделать его переносными и визуально скрытным, автоматизация управления и корректировки полета ЛА, размещение элементов управления в портативном контейнере, в связи с чем обеспечивается высокая проходимость комплексов на местности и практически исключается фактор влияния шумовых характеристик, существенное увеличение дальности разведки. В самом ЛА комплекса полностью скомпенсирован реактивный момент и исключена соответствующая потеря мощности, а также винт защищен от механических воздействий при приземлении аппарата.
Основой для технологической выполнимости портативного комплекса авианаблюдений и автономно пилотируемого летательного микроаппарата для него являются успехи в нескольких микротехнологиях, в особенности технологиях микроэлектромеханических систем. Эти системы объединяют планарные электронные микрокомпоненты с сопоставимыми по размерам пространственными электромеханическими структурами различной сложности, что обеспечивает уникальные функциональные возможности. В настоящее время такие устройства (например, самарий-кобальтовый мотор Firefly, микромеханический акселерометр ADXL105, микромеханический гироскоп ADXSR300) производятся промышленным способом. Другим направлением развития микроэлектронных систем является разработка крошечных видеокамер (например, Eyecam), мининиатюрных инфракрасных датчиков и датчиков биологического и химического анализа для обнаружения опасных объектов. Размер этих устройств не превышает габаритов обычных микросхем и является определяющим в выборе размеров автономно пилотируемого летательного микроаппарата.
Указанный выше технический результат настоящего изобретения достигается тем, что в комплексе авианаблюдений, содержащем дистанционно пилотируемый летательный микроаппарат с автономной бортовой системой обеспечения полета летательного аппарата, бортововой приемопередающей аппаратурой и видеокамерой с передатчиком изображений, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом, для обеспечения этого технического результата радиоуправляемая бортовая система обеспечения полета летательного аппарата и автономная радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными чувствительными элементами, такими как гироскопы-акселерометры, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем портативном контейнере.
Кроме того, радиоуправляемая бортовая система обеспечения полета летательного аппарата может быть выполнена в виде микромеханической бесплатформенной инерциальной навигационной системы, своим выходом связанной с бортовой приемопередающей аппаратурой и через, по меньшей мере, одну рулевую машинку с электродвигателем, по меньшей мере, одного движителя автономно пилотируемого летательного микроаппарата.
Кроме того, микромеханическая бесплатформенная инерциальная навигационная система может состоять из микропроцессора и связанных с его входами радиоприемника глобальной навигационной системы, блока датчиковой аппаратуры, микромеханического бесплатформенного измерительного блока, а с выходом - проблесковых маячков, причем свободный выход микропроцессора может быть выходом микромеханической бесплатформенной инерциальной навигационной системы.
Кроме того, мобильный комплекс управления и обработки информации может быть снабжен портативным персональным компьютером, одометром, связанными между собой радиоприемником глобальной навигационной системы и инерциальным измерительным блоком, а также компасом, причем одометр, инерциальный измерительный блок и наземная приемопередающая аппаратура могут быть подключены к входам портативного персонального компьютера.
В автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений, содержащий фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура, для обеспечения достижения этого технического результата введена антенная система, закрепленная на фюзеляже, выполненном с приборным отсеком, в корпусе которого установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры, причем винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока, редуктором и электродвигателем, подключенным к общей аккумуляторной батарее.
Кроме того, приборный отсек может быть расположен в средней части фюзеляжа.
Кроме того, антенная система может быть выполнена в виде закрепленных в средней части фюзеляжа и расходящихся от нее штанг, представляющих собой антенну радиоприемника глобальной навигационной системы, антенну передатчика видеоизображения и антенну бортовой приемопередающей аппаратуры.
Кроме того, винтовой блок и приборный отсек могут быть установлены в корпусе фюзеляжа вдоль общей оси симметрии, относительно которой могут быть последовательно закреплены винт, редуктор и электродвигатель, аккумуляторная батарея, платы приборов радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры, а также видеокамера с передатчиком видеоизображения.
Кроме того, к свободным концам штанг может быть прикреплен, по меньшей мере, один дефлектор для защиты лопастей винта.
Кроме того, по меньшей мере, два винтовых блока могут быть размещены на свободных концах штанг по разные стороны от средней части фюзеляжа.
Кроме того, свободные концы штанг могут быть снабжены проблесковыми маячками.
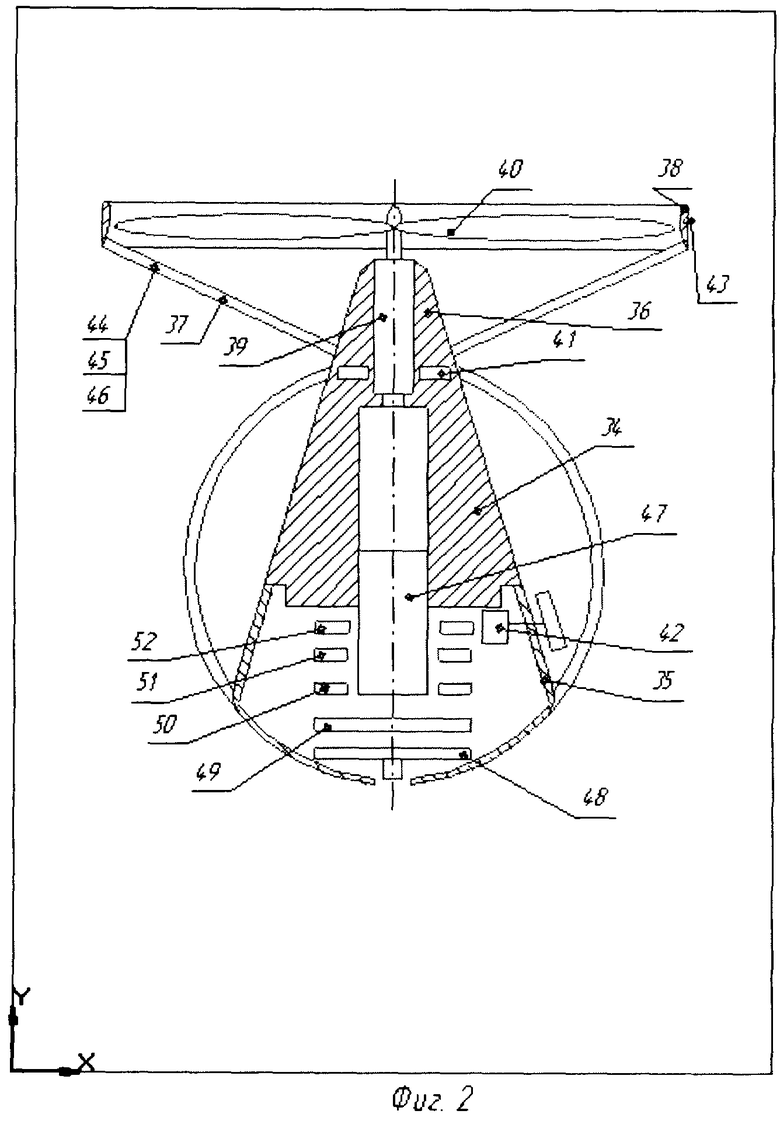
На фиг.1 представлена блок-схема портативного комплекса авианаблюдений;
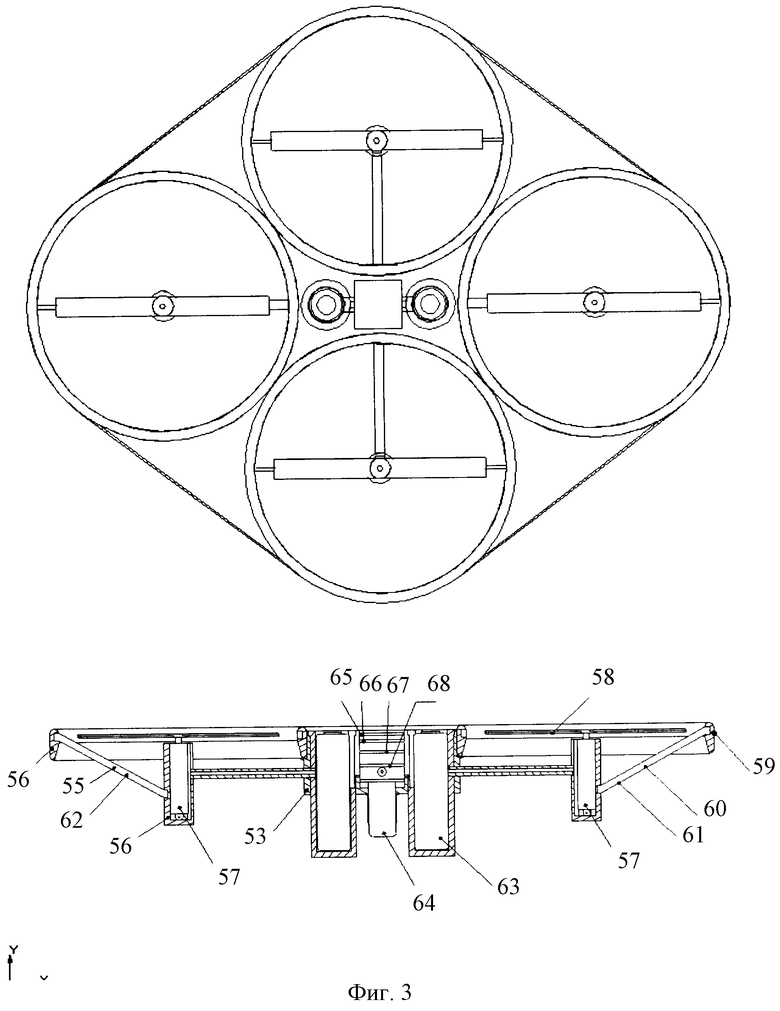
на фиг.2 представлена конструктивная схема автономно пилотируемого летательного микроаппарата с одним винтовым блоком;
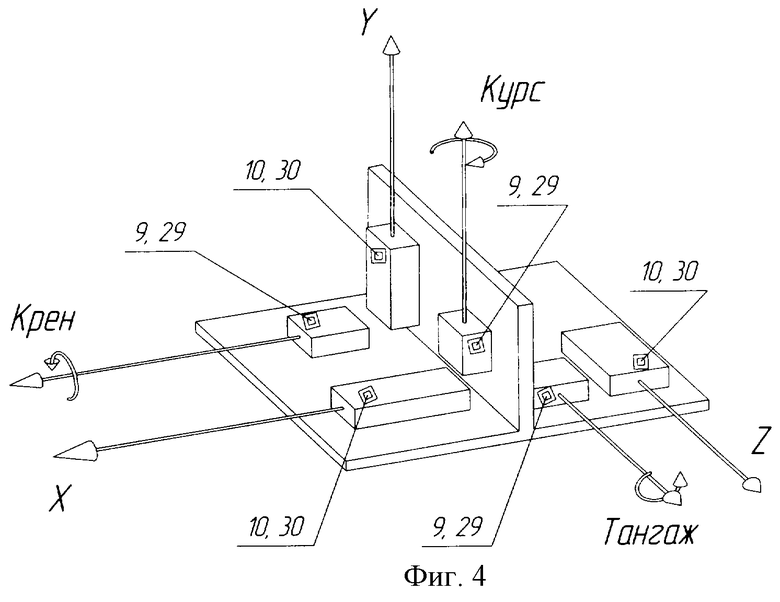
на фиг.3 представлена конструктивная схема автономно пилотируемого летательного микроаппарата с четырьмя винтовыми блоками;
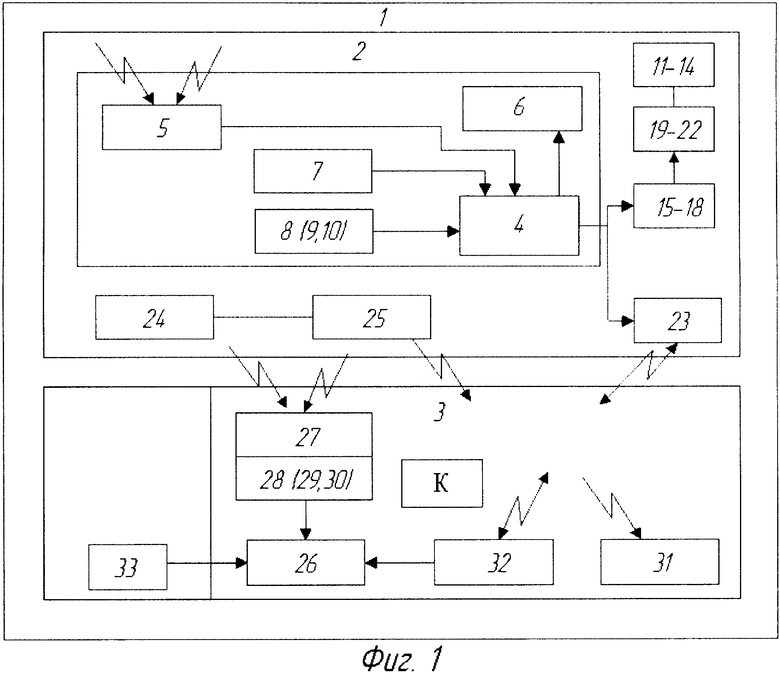
на фиг.4 представлена блок-схема микромеханического бесплатформенного инерциального блока 8 и 28.
Портативный комплекс авианаблюдений содержит портативный контейнер 1 с автономно пилотируемым летательным микроаппаратом 2 и мобильным комплексом управления и обработки информации 3. При этом автономно пилотируемый летательный микроаппарат 2 содержит микропроцессор 4, связанный с радиоприемником глобальной навигационной системы 5, блоком проблесковых маячков 6, блоком датчиковой аппаратуры 7, микромеханическим бесплатформенным инерциальным блоком 8, с блоками микромеханических вибрационных гироскопов 9 и акселерометров 10, четырьмя винтами 11-14 через рулевые машинки 15-18 и электродвигатели 19-22, бортовой приемопередающей аппаратурой 23; видеокамеру 24, связанную с передатчиком видеоизображения 25, а мобильный комплекс управления и обработки информации 3 содержит портативный персональный компьютер 26, связанный с радиоприемником глобальной навигационной системы 27, микромеханическим инерциальным блоком 28, с блоками микромеханических вибрационных гироскопов 29 и акселерометров 30, приемником видеоизображения 31, наземной приемопередающей аппаратурой 32 и одометром 33.
Предлагаемый автономно пилотируемый летательный микроаппарат в случае выполнения его одновинтовым состоит из фюзеляжа 34, который включает в себя корпус приборного отсека 35, гондолу двигателя 36, на которой с помощью штанг 37 укреплен дефлектор 38. В гондоле установлен электродвигатель 39 с редуктором и винтом 40, рулевыми машинками 41, расположенными в кардановом подвесе, и с одной или несколькими рулевыми машинками 42. В дефлекторе по периферии размещены проблесковые маячки 43, а на штангах - антенна 44 радиоприемника глобальной навигационной системы, антенна 45 передатчика видеоизображения и антенна 46 бортовой приемопередающей аппаратуры. В корпусе приборного отсека установлены аккумуляторная батарея 47, видеокамера 48 с передатчиком видеоизображения, плата 49 приемника глобальной навигационной системы, плата 50 датчиковой аппаратуры и плата 51 микромеханического бесплатформенного инерциального блока с микропроцессором 52.
Предлагаемый автономно пилотируемый летательный микроаппарат в случае выполнения его, например, четырехвинтовым, что значительно повышает его управляемость, маневренность и грузоподъемность, состоит из фюзеляжа, который включает в себя корпус приборного отсека 53, гондолу двигателя 54, на которой с помощью штанг 55 укреплен дефлектор 56. В гондоле установлен электродвигатель 57 с редуктором и винтом 58. В дефлекторе по периферии размещены проблесковые маячки 59, а на штангах - антенна 60 радиоприемника глобальной навигационной системы, антенна 61 передатчика видеоизображения и антенна 62 бортовой приемопередающей аппаратуры. В корпусе приборного отсека установлены аккумуляторная батарея 63, видеокамера 64 с передатчиком видеоизображения, плата 65 приемника глобальной навигационной системы, плата 66 датчиковой аппаратуры и плата 67 микромеханического бесплатформенного инерциального блока с микропроцессором 68.
Работа портативного комплекса авианаблюдений осуществляется следующим образом.
На экран портативного персонального компьютера выводится карта района патрулирования и по сигналу наземной интегрированной бесплатформенной инерциальной навигационной системы (ИБИНС) координаты оператора.
Полетное задание, включающее в себя траекторию, скорость, высоту полета, а также координаты пунктов назначения, задается на земле оператором с помощью клавиатуры портативного персонального компьютера. После этого управление аппаратом возложено на систему управления, состоящую из бесплатформенной инерциальной навигационной системы и модуля спутниковой навигации.
Взлет аппарат совершает автоматически, стартуя с портативного контейнера или с руки оператора. Совершив набор высоты, летательный аппарат следует по заданному маршруту с заданной траекторией (прямолинейная, змейка и т.д.), с указанной скоростью и высотой полета и совершает автоматическую посадку в заданной точке.
Стабилизация ЛМА по траектории его движения осуществляется автоматически с помощью автопилота. В автопилоте имеется три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловой скорости используются микромеханические вибрационные гироскопы. В качестве датчиков высоты используются микромеханический акселерометр и барометрический высотомер.
Законы управления формируются с помощью микропроцессора и позволяют осуществлять стабилизацию курса, крена и тангажа в прямолинейном полете (стабилизация углов относительно центра масс) и координированных разворотов. Навигация в процессе полета осуществляется с помощью интегрированной бесплатформенной инерциальной навигационной системы (ИБИНС) и приемника глобальной навигационной системы. Для кратковременных участков полета навигация осуществляется в системе координатной сетки для данной проекции карты.
Винтовой блок автономно пилотируемого летательного микроаппарата представляет собой устройство с одним несущим винтом. Фюзеляж винтового блока автономно пилотируемого летательного микроаппара в случае выполнения его одновинтовым изготовлен по симметричной схеме из композиционного материала и вписывается в сферу обметания диаметром 150 мм. Для управления по крену и тангажу используются две рулевые машинки, которые изменяют вектор тяги винта с двигателем относительно корпуса автономно пилотируемого летательного микроаппарата. Управление по курсу осуществляется аэродинамическими рулями.
Подъемная сила создается воздушным винтом, приводимым в движение электродвигателем, питанием для которого служит аккумуляторная батарея. Для создания горизонтальной составляющей тяги винта двигатель, установленный в карданов подвес, наклоняется в нужном направлении при помощи двух рулевых машинок. Компенсация возникающего при работе двигателя реактивного момента обеспечивается двумя парами аэродинамических рулей, угловое положение которых изменяется рулевыми машинками.
Компенсация реактивного момента обеспечивается двумя парами аэродинамических рулей. Аэродинамические рули выставляются в нужное положение четырьмя рулевыми машинками, расположенными в корпусе летательного аппарата.
Система компенсации реактивного момента действует по следующему принципу. Блок микро БИНС определяет наличие и значение угловой скорости вокруг оси симметрии (курса) автономно пилотируемого летательного микроаппарата. Информация об угловой скорости обрабатывается бортовым микропроцессором, который синтезирует сигнал, посылаемый на рулевые машинки. Рулевые машинки поворачивают аэродинамические рули в новое угловое положение. Поток воздуха, идущий от винта, оказывая давление на поверхность аэродинамических рулей, создает момент вокруг оси симметрии автономно пилотируемого летательного микроаппарата, равный текущему реактивному моменту двигателя, в случае выполнения его четырехвинтовым, что обеспечивает его большую управляемость, маневренность, грузоподъемность с помощью алгоритма управления (соотношения тяг винтов) от микропроцессора.
Таким образом, система компенсации реактивного момента непрерывно обеспечивает стабильное угловое положение автономно пилотируемого летательного микроаппарата относительно оси симметрии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
Группа изобретений относится к малогабаритным авиационным системам с дистанционно пилотируемыми летательными микроаппаратами и предназначена для фото и видео разведки в режиме реального времени, а также биологической, химической и ядерной разведки местности и т.п. Портативный комплекс авианаблюдений содержит дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображения, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображений и радионавигационной системой управления летательным аппаратом. Радиоуправляемая бортовая система обеспечения полета летательного аппарата и радионавигационная система управления летательным аппаратом снабжены корректируемыми по глобальной навигационной системе инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами, а сам дистанционно пилотируемый летательный аппарат выполнен в виде автономно пилотируемого летательного микроаппарата и размещен вместе с мобильным комплексом управления и обработки информации в общем, портативном контейнере. Автономно пилотируемый летательный микроаппарат для портативного комплекса авианаблюдений содержит фюзеляж, на котором размещены винтовой движитель, рулевое управление по курсу и тангажу, видеокамера с передатчиком видеоизображения, радиоуправляемая бортовая система обеспечения полета летательного аппарата и бортовая приемопередающая аппаратура. Кроме того, в него введена антенная система, закрепленная на фюзеляже, выполненным с приборным отсеком. В корпусе отсека установлены видеокамера с передатчиком видеоизображения, рулевые машинки, аккумуляторная батарея, приборы радиоуправляемой бортовой системы обеспечения полета летательного аппарата и бортовой приемопередающей аппаратуры. Винтовой движитель выполнен в виде, по меньшей мере, одного винтового блока с редуктором и электродвигателем, подключенным к общей аккумуляторной батарее. Техническим результатом группы изобретений является существенное уменьшение габаритов и веса комплекса, автоматизация управления и корректировки полета летательного аппарата и размещение элементов управления в портативном контейнере. Это обеспечивает высокую проходимость комплекса на местности, исключение фактора влияния шумовых характеристик, увеличение дальности разведки. В самом летательном аппарате комплекса полностью скомпенсирован реактивный момент и исключена соответствующая потеря мощности. При этом винт защищен от механических воздействий при приземлении аппарата. 2 с. и 7 з.п. ф-лы, 4 ил.
| АВИАЦИОННЫЙ РАЗВЕДОВАТЕЛЬНЫЙ КОМПЛЕКС | 1992 |
|
RU2067952C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ АВИАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2015067C1 |
| US 5054713 A, 08.10.1991 | |||
| US 4955962 A, 11.09.1990 | |||
| ТРЕХФАЗНАЯ ОДНО-ДВУХСЛОЙНАЯ ЭЛЕКТРОМАШИННАЯ ОБМОТКА ПРИ 2p=2c ПОЛЮСАХ В z=27c ПАЗАХ (q=4,5) | 2004 |
|
RU2270510C2 |

