Изобретение относится к преобразователям энергии, работающим на основе применения пьезокерамических материалов, и может быть использовано в любой области техники в качестве источника тока. Сущность: генератор содержит ротор с диском или барабаном, который приводится во вращательное движение, и статор, на котором закреплены пьезоэлементы большой электрической емкости. При вращении ротора с помощью металлических пластин, закрепленных на диске или барабане и пьезоэлементах, осуществляется периодическая деформация последних за счет эффекта Казимира. Вследствие прямого пьезоэффекта на электродах пьезоэлементов генерируется переменное напряжение. Количество металлических пластин на поверхности пьезоэлементов и диска или барабана, а также частота вращения последних подбираются таким образом, чтобы сила Казимира действовала на пьезоэлементы с их резонансной частотой. Эта особенность совместно с большой емкостью пьезоэлементов приводит к значительному повышению выходной мощности генератора по сравнению с любыми нерезонансными пьезоэлектрическими преобразователями.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к электромеханическим преобразователям энергии, а именно к преобразователям, работающим на основе применения резонансных свойств пьезоэлектрических материалов.
Изобретение может быть использовано в качестве источника переменного или постоянного тока в устройствах с любым приводом, обеспечивающим вращение ротора, и найти применение в быту, промышленности и на транспорте.
В настоящее время в мире существует множество предложений, патентов и действующих моделей устройств, преобразующих энергию разнообразных механических деформаций, сопутствующих природным явлениям, работе машин или движений человека в электрическую посредством пьезоэлементов (например, Mitcheson, P., «Energy Harvesting from Human and Machine Motion for Wireless Electronic Devices», Proceedings of IEEE, vol. 96, p. 1457, 2008; патенты US 6767161B1, US 4739179A, RU 2470452). Исследования в области создания подобных устройств ведутся рядом университетов и компаний. В англоязычной литературе появился специальный термин, обозначающий сущность таких преобразователей: Energy Harvesting. Все системы подобного типа являются открытыми, поскольку источники механических деформаций являются внешними по отношению к пьезоэлементам и связанным с ними электротехническими схемами. Поэтому в таких устройствах возможна генерация полезной электроэнергии, превышающей затраты энергии, необходимой для обеспечения работы самого устройства.
Общим недостатком всех подобных устройств является потребность в более-менее постоянном источнике сопутствующих механических деформаций для обеспечения постоянства напряжения или тока на выходе пьезоэлементов. Это требование выполнить довольно сложно ввиду нерегулярности, присущей многим подобным источникам деформации. Примером могут служить деформации дорожного полотна, вызываемые движением человека или транспорта. В этом случае для обеспечения постоянства электрических характеристик на выходе пьезоэлементов нужно покрывать ими значительные площади, что связано с большими затратами и сложностью эксплуатации. К тому же такой подход не решает проблему, например в ночное время. В ряде коммерческих устройств, преобразующих сопутствующие механические деформации в электроэнергию посредством пьезоэффекта, последняя используется для зарядки конденсатора большой емкости (например, продукция компаний «Mide»: www.mide.com, или «Linear Technology*: www.linear.com/products/energy_harvesting). Разряжаясь, конденсатор обеспечивает на выходе почти постоянный ток, даже если деформации на входе системы временно отсутствуют. Однако именно из-за желания поддерживать постоянство тока, его величина, а значит, и выходная мощность подобных преобразователей оказывается очень малой и пригодной для питания весьма ограниченного круга устройств. Низкая выходная мощность вообще является принципиальным недостатком всех подобных преобразователей. Это связано как с большим выходным импедансом пьезоэлементов при низких частотах возбуждения, так и с их малой чувствительностью - несколько милливольт на ньютон внешней нагрузки (например, патенты RU 2470452, RU 2499350). Уменьшение выходного импеданса в таких устройствах возможно лишь экстенсивным путем: увеличением площади и/или уменьшением толщины пьезоэлементов, что связано с отмеченными выше проблемами больших покрываемых площадей. Оба недостатка в значительной мере уменьшаются, если внешняя сила действует на пьезоэлемент с его резонансной частотой - обычно в пределах от десятков до сотен кГц. Однако природные или сопутствующие техногенным процессам явления, способные вызывать деформации с такими частотами, встречаются крайне редко. Тем более, что для устойчивой работы генератора частота возбуждающей силы не должна выходить за пределы полосы резонансного приема пьезоэлемента - порядка сотни Гц.
Другой класс устройств, преобразующих механическую энергию в электрическую, включает в себя сам источник деформаций пьезоэлементов. Например, устройство согласно патенту RU 2113757, в котором деформация биморфного пьезоэлемента осуществляется при качении роликов по его поверхности. Такие устройства обеспечивают постоянство электрических параметров на выходе.
Недостаток этого класса устройств состоит в том, что они являются системами замкнутого типа. А значит, в них возможно лишь преобразование энергии из одного вида в другой. Коэффициент такого преобразования энергии всегда меньше единицы.
Все перечисленные недостатки отсутствуют в заявленном устройстве резонансного пьезоэлектрического генератора тока на основе эффекта Казимира, в котором периодические деформации пьезоэлементов вызываются механической силой (притяжения), возникающей между металлическими пластинами на поверхности стационарных пьезоэлементов и вращающегося диска или барабана при их перекрытии. Величина этой силы обратно пропорциональна четвертой степени расстояния между пластинами и пропорциональна их площади. Эксперименты последних лет подтверждают эту зависимость с точностью 10-15%. Существенно, что деформации пьезоэлементов происходят с резонансной частотой, что приводит к значительному повышению их чувствительности пропорционально добротности материала пьезоэлемента. Для распространенных марок российских и зарубежных пьезокерамик добротность лежит в диапазоне от 50 до 1200. Помимо повышения чувствительности, т.е. выходного напряжения генератора, выходной импеданс пьезоэлементов уменьшается пропорционально резонансной частоте: в десятки тысяч раз по сравнению с низкочастотными деформациями. Это ведет к пропорциональному росту тока во внешней цепи, т.е. выходной мощности.
Источником механической силы является поляризация вакуума квантовых полей вследствие изменения спектра вакуумных колебаний при изменении расстояния между пластинами. Это и есть эффект Казимира.
Уникальной особенностью эффекта Казимира является отсутствие составляющей силы, направленной параллельно поверхности плоских притягивающихся пластин, т.е. сила Казимира не тормозит вращение диска или барабана и, значит, не требуется дополнительная мощность на ее преодоление.
Эти обстоятельства весьма существенны для обеспечения генерации полезной электроэнергии, поскольку при постоянстве мощности, необходимой для вращения диска или барабана, генерируемое пьезоэлементами напряжение зависит только от их пьезоэлектрических характеристик, площади и расстояния между металлическими пластинами. Таким образом, выходные электрические характеристики устройства связаны с его геометрическими параметрами, но не с потребляемой мощностью. Важной особенностью конструкции генератора является невысокая частота вращения ротора 50-100 Гц. Необходимая резонансная частота возбуждения пьезоэлементов достигается количеством металлических пластин на их поверхности и диске ротора. Так, если число пластин на диске и пьезоэлементе одинаково и каждое равно n, то за один оборот диска сила Казимира действует на пьезоэлемент n раз. Если частота вращения диска равна ƒ, то частота возбуждений пьезоэлемента станет nƒ. Таким образом, подбирая число пластин и частоту вращения ротора, можно сделать nƒ равной резонансной частоте пьезоэлемента. Таким образом, пьезоэлемент совершает вынужденные колебания под действием силы Казимира, действующей с частотой nƒ. При совпадении частоты nƒ с собственной (резонансной) частотой пьезоэлемента, создается условие резонанса и амплитуда деформации пьезоэлемента достигает максимальной величины. Поскольку величина генерируемого пьезоэлементом электрического напряжения пропорциональна величине его деформации, то в резонансе оно также достигает максимального значения. Далее, поскольку для данной активной нагрузки, подключенной к выходу генератора, мощность пропорциональна квадрату напряжения, то и она достигает максимума в резонансе.
Предлагаемое устройство является открытой системой, в которой возможно извлечение энергии, поскольку физический вакуум, как наинизшее состояние квантовых полей, присутствует везде и всегда, являясь неограниченным источником деформаций указанного типа. Таким образом, устройство обеспечивает непрерывную выработку электроэнергии, а его эффективность определяется соотношением между потребляемой мощностью, параметрами пьезоэлементов, расстоянием между металлическими пластинами и их размерами. Источником механических деформаций пьезоэлементов является эффект Казимира.
Предлагаемое устройство допускает масштабирование как в радиальном направлении (увеличение радиуса диска и пьезоэлементов), так и в продольном (увеличение числа дисков на валу ротора и элементов статора с пьезоэлементами). Пропорционально увеличивается суммарное выходное напряжение всего устройства. При этом нужно соблюдать положительный баланс с мощностью, потребляемой электромотором или иным устройством, обеспечивающим вращение вала.
Сущность изобретения поясняется чертежами, на которых изображено:
На фиг. 1 продольный разрез общей компоновки генератора на примере двух вращающихся дисков на валу и двух пар пьезоэлементов. Вакуумный объем, в который помещается устройство на чертеже не показан.
На фиг. 2 общая схема устройства вращающегося диска и электрическая схема отбора выходной мощности генератора с контуром управления, поддерживающим постоянство зазора между диском и пьезоэлементом.
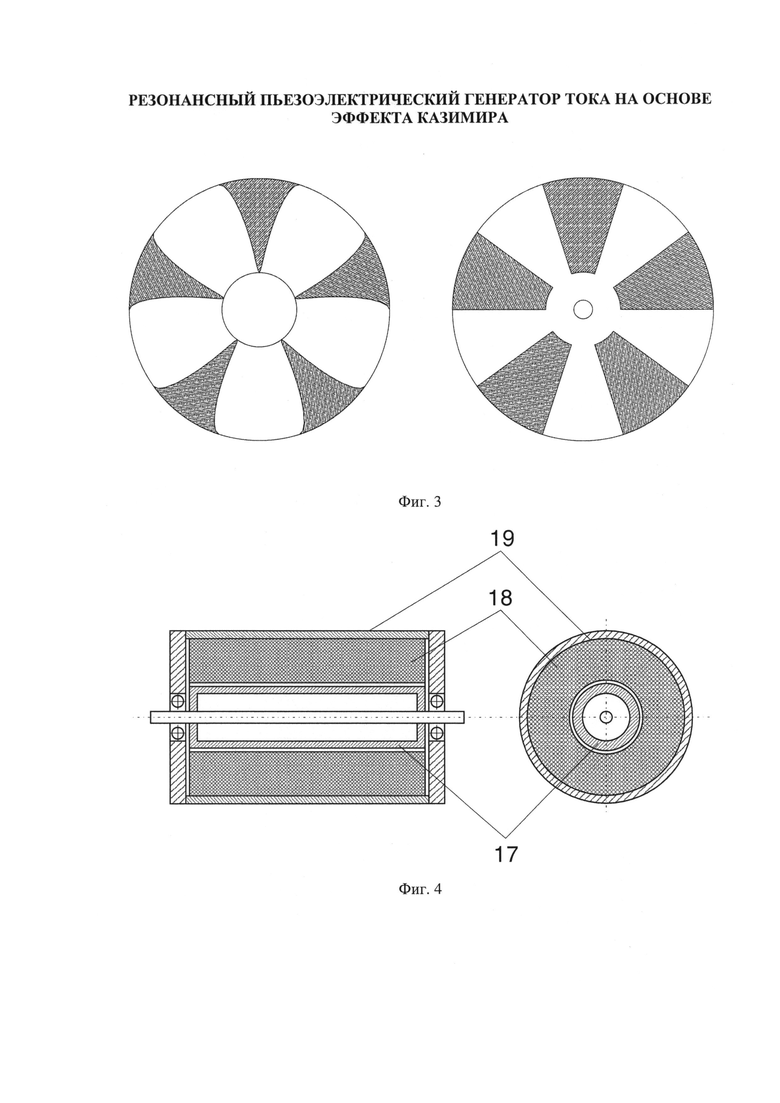
На фиг. 3 пример расположения металлических слоев (пластин) на поверхности пьезоэлемента (слева) и диска (справа). Для большей иллюстративности формы показаны только 5 металлических секторов (заштрихованы).
На фиг. 4 вариант генератора с ротором и статором барабанного типа.
На фиг. 5 схема электромеханического аналога генератора в резонансном режиме.
На фиг. 6 таблица со значениями параметров электромеханической схемы для различных марок российских пьезокерамик и расчетная величина выходной мощности каждого пьезоэлемента генератора. В скобках приведены марки аналогов производства США.
Заметим, что чертежи и схемы не охватывают все возможные технические решения данного устройства, а являются лишь иллюстрирующими материалами частного случая.
Устройство на фиг. 1 включает диски 6, жестко посаженные на ведущий вал 2, ось которого фиксирована в подшипниковых узлах 1 и 8 статора. Статор состоит из пластин 9, 10, 11 с одинаковыми пьезоэлементами 13, обращенными к дискам 6. На фиг. 1 изображены пьезоэлементы в форме колец, соответствующие наибольшим стандартным размерам коммерческих марок пьезокерамики российской компании «ЭЛПА» с внешним диаметром 70 мм, внутренним 20 мм и толщиной 4 мм. Большая площадь и малая толщина пьезоэлементов обеспечивают большую их электрическую емкость и высокий коэффициент упругости, т.е. малую деформацию поверхности пьезоэлементов при заданной внешней силе. Вал генератора вращается посредством привода, состоящего из сплошного диска 3, жестко насаженного на вал 2, и синхронного двигателя, полюса которого схематически показаны в позиции 4. На обе стороны вращающихся дисков 6 наносятся тонкие пленки электроактивных диэлектриков на основе силиконов, акрилатных или натуральных каучуков с электродами. Поверх пленок на жесткую основу наносится симметричный «рисунок» из металлических слоев (пластин). Аналогичные металлические слои наносятся на поверхности пьезоэлементов, обращенные к диску. Проводящая шина на поверхности вала 2, схематически показанная в позиции 7, служит для подачи потенциала смещения и управляющего напряжения на электроды электроактивных диэлектриков через контактный узел 5. Шина 7 электрически изолирована от вала 2, имеющего заземление. Пластина 12 служит для крепления подшипникового узла 1. Жесткое крепление генератора внутри вакуумного объема осуществляется металлическими пластинами 9, 10, 11, 12. При работе генератора радиальное и осевое смещения вала 2 не допускается, поэтому подшипниковые узлы 1 и 8 должны осуществлять соответствующее силовое замыкание. На фиг. 1 показан один из вариантов их конструкции на основе насыпных подшипников качения. Подобная конструкция используется в прецизионных приборах и гироскопах, обеспечивая хорошее осевое и радиальное центрирование вала, в т.ч. и при высоких оборотах. Помимо насыпных, возможно применение стандартных прецизионных подшипников качения легких серий. Постоянство частоты вращения вала 2 в резонансном режиме работы генератора поддерживается стабилизацией частоты возбуждения обмотки синхронного двигателя с помощью опорного кварцевого генератора. Показанный на фиг. 1 привод вращения вала на основе простейшего синхронного двигателя, находящегося в вакуумном объеме, не является единственно возможным. Может применяться любой экономичный вид двигателя, расположенный как внутри вакуумного объема, так и снаружи, а передача вращающего момента валу генератора осуществлятся с помощью муфты подходящего типа, например магнитной.
На фиг. 2 схематически показана структура одной из поверхностей вращающегося диска 6 и обращенной к ней поверхности пьезоэлемента 13. Электроактивный диэлектрик 14 наносится на поверхность диска. Поверх диэлектрика и на обращенной к диску поверхности пьезоэлемента располагаются жесткие подложки 15 с металлическими слоями (пластинами) 16. На верхних и нижних поверхностях электроактивного диэлектрика и пьезоэлемента нанесены электроды с указанной электрической схемой подключения. Металлические слои 16 заземлены для исключения электростатического взаимодействия диска и пьезоэлемента. Резистор RH обозначает основную внешнюю нагрузку, на которую работает генератор. Резистор RД и фазосдвигающая RC - цепочка из резистора R и емкости С, формируют управляющий контур, назначение которого - сохранять постоянство зазора между пьезоэлементом и диском посредством изменения толщины электроактивного диэлектрика при подаче на его электроды переменного управляющего напряжения UУПР, величина и фаза которого определяется номиналами RД, R и С. Постоянное напряжение смещения UСМ служит для подстройки начальной величины зазора между пьезоэлементом и диском. Емкость CR изолирует выход генератора от UСМ.
На фиг. 3 показаны профили металлических слоев на поверхности пьезоэлемента (слева) и диска (справа). Диски должны иметь высокую чистоту поверхности и однородность по толщине. Можно использовать диски, аналогичные используемым в производстве жестких дисков компьютеров. Такие диски выполняются на стеклянной или керамической основе и отличаются очень высокой чистотой поверхности, отсутствием волнистости, постоянством толщины и сбалансированностью. Поверхность металлических слоев толщиной 2-3 мкм также должна иметь высокую чистоту. В качестве жестких подложек, на которые наносятся слои, могут использоваться тонкие пластины из пирекса или кварцевого стекла. Такие стекла обладают малым коэффициентом теплового расширения, высокими электроизоляционными свойствами и хорошо отработанной технологией обработки поверхности, поскольку применяются в прецизионной оптике. Металлические слои могут наноситься литографическим способом или электролитическим осаждением с последующим электрохимическим фрезерованием и электрохимической полировкой, способной обеспечить чистоту поверхности вплоть до 12-13 классов. Дополнительные способы полировки могут обеспечить чистоту 14 класса.
Тонкие слои электроактивных диэлектриков изготавливаются растворением подходящих коммерческих видов каучуков или силиконов с последующей формовкой субстрата и удалением растворителя вместе с примесями. В качестве эластичных электродов могут использоваться, например, токопроводящие краски.
В процессе работы должен сохраняться очень малый зазор между пьезоэлементами 13 и дисками 6. Его можно обеспечить при сборке устройства за счет теплового расширения ведущего вала, материалов статора и дисков. Статор и диски жестко фиксируются на валу в положении полного прилегания поверхностей пьезоэлементов и дисков при пониженной (или повышенной) температуре. Затем вся сборка доводится до температуры, соответствующей установившемуся режиму работы в резонансном режиме, помещается в герметичный объем и откачивается. За счет теплового удлинения (сокращения) вала и других материалов между диском и статором появляются необходимые зазоры. Величину их можно контролировать подбором материала отдельных деталей устройства, их продольными (вдоль оси вала) размерами, а также температурой, при которой производится сборка. Кроме того, регулирование зазора может проводиться подстройкой напряжения смещения UСМ на электродах электроактивных диэлектриков, которое приводит к расширению или сжатию последних.
Основной узел генератора может быть выполнен в виде двух соосных барабанов (фиг. 4). В такой конструкции металлические слои наносятся на внешнюю поверхность барабана 17 и обращенную к ней поверхность пьезоэлемента 18, который закреплен на внутренней поверхности статора 19. Электроактивный диэлектрик наносится на поверхность барабана 17 по схеме, подобной фиг. 2. Установка необходимого зазора также достигается за счет теплового расширения в радиальном направлении и напряжения смещения UСМ.
Откачка объема генератора до сверхглубокого вакуума, как в прецизионных экспериментах, не требуется. В точных экспериментах глубокий вакуум нужен в основном для предотвращения влияния внешних акустических возмущений, тепловых потоков и окисления рабочих поверхностей исследуемых материалов. В рассматриваемом устройстве слои на поверхности дисков и пьезоэлементов предполагается делать из неокисляемых металлов. Роль акустических вибраций неважна, если она не приводит к непосредственному касанию дисков и пьезоэлементов.
Поскольку предлагаемый пьезоэлектрический генератор является многоэлементным, в нем могут быть получены различные уровни напряжений и токов путем соединения электродов пьезоэлементов в электрическую цепь последовательно или параллельно, либо использовать различные схемы суммирования напряжения или тока.
При работе устройства не происходит механического износа пьезоэлементов, поскольку отсутствует непосредственный механический контакт между ними и объектом, вызывающим их деформацию.
ГЕНЕРАТОР РАБОТАЕТ СЛЕДУЮЩИМ ОБРАЗОМ
При вращении дисков 6 металлические пластины 16 на их поверхности периодически перекрывают аналогичные пластины на пьезоэлементах 13. В области перекрытия пластин действует сила Казимира, вызывающая растяжение пьезоэлементов. Вследствие прямого пьезоэффекта на их электродах генерируется разность потенциалов. Краткая сводка расчетных формул приведена в приложении 1.
Для оценки величины генерируемой энергии с учетом внешней нагрузки применен электромеханический аналог пьезоэлемента по схеме сила - напряжение. Эквивалентная электрическая схема генератора показана на фиг. 5. Левая часть схемы, включающая первичную обмотку трансформатора, представляет механическую часть пьезоэлемента, правая - электрическую. В электрическом аналоге давление Казимира заменяется эквивалентным источником переменного напряжения UBX. Обозначения на схеме соответствуют: λ - коэффициенту трансформации, Lm - динамической индуктивности пьезоэлемента, Rm - его механическому сопротивлению, RН - внешней нагрузке. Сопротивление Rp определяется материалом пьезоэлемента и составляет обычно десятки МОм, Ср и Сm - электрическая и динамическая емкость пьезоэлемента, соответственно.
Поскольку сила Казимира пропорциональна площади перекрытия пластин, то напряжение на электродах пьезоэлементов имеет форму, близкую к пилообразной, если металлические слои имеют форму простых кольцевых секторов, как на правой части фиг. 3. Однако в резонансном режиме пьезоэлемент является по сути узкополосным фильтром с полосой пропускания порядка ƒa/Qa, где ƒa - резонансная частота и Qa - электромеханическая добротность пьезоматериала. Значит, на выход его пройдут только гармонические компоненты с частотами в пределах этой полосы. Интенсивность каждой прошедшей компоненты определяется ее коэффициентом разложения в ряд Фурье входного сигнала. Если входной сигнал имеет пилообразную форму с частотой повторения ƒa, то коэффициент разложения Фурье гармонической компоненты с частотой ƒа равен 0.4. Поскольку выходная мощность пропорциональна квадрату напряжения, то при пилообразной форме входного сигнала она снижается до 0.16 от максимально возможной. Если входной сигнал меняется по гармоническому закону с частотой ƒa, то коэффициент разложения равен 1 и потери мощности не происходит. Именно поэтому форма металлических слоев на поверхности пьезоэлементов выбрана такой, как показана на фиг. 3 слева. Она представляет собой отображение синусоидальной кривой с постоянной составляющей на угловой сектор диска. Постоянная составляющая не сказывается на работе устройства в резонансном режиме. Таким образом, при указанных на фиг. 3 формах металлических слоев на пьезоэлементе и диске, входной сигнал каждого пьезоэлемента меняется по гармоническому закону с частотой ƒa. Однако, поскольку площадь слоя синусоидальной формы составляет примерно 57% площади кругового сектора (эта доля не зависит от числа секторов), то действующая на пьезоэлемент сила и генерируемое им напряжение уменьшаются на столько же. Поэтому выходная мощность составляет примерно 0.33 от мощности идеальной конфигурации (когда площади секторов диска и пьезоэлемента равны, а сигнал гармонический).
В таблице на фиг. 6 приведены значения параметров электромеханический схемы для различных марок пьезокерамики и расчетная величина выходной мощности W каждого пьезоэлемента генератора. Расчеты выполнены для пьезоэлементов в виде колец, указанных выше размеров с внешним диаметром 70 мм, внутренним 20 мм и толщиной 4 мм. Расстояние между металлическими пластинами диска и пьезоэлемента принято 0.01 мкм, что соответствует давлению Казимира, равному 3208 Па. Расчеты выполнены для частоты ƒa, равной 271.558 кГц, соответствующей первому максимуму импеданса пьезокерамики PZT-5A (аналог ЦТС-36) указанного размера. Для других марок пьезокерамики частоты отличаются незначительно. В таблице на фиг. 6 мощность приведена с учетом описанного в предыдущем абзаце фактора уменьшения 0.33. Чтобы получить полную выходную мощность генератора, нужно значения в последней колонке таблицы умножить на число пьезоэлементов, входящих в его состав. Значительная выходная мощность достигается за счет электромеханической добротности пьезокерамик, снижения их выходного электрического импеданса в резонансном режиме и малого полагаемого зазора между диском и пьезоэлементом.
Поскольку напряжение, генерируемое пьезоэлементом, однозначно связано с его деформацией, то в резонансном режиме работы амплитуда смещения поверхности пьезоэлемента значительно больше, чем в нерезонансной области частот и может превышать зазор между пьезоэлементом и диском. Однако, согласно общей теории колебаний, в резонансе деформация и действующая гармоническая сила смещены по фазе на π/2, т.е. когда сила максимальна (полное перекрытие металлических слоев), деформация поверхности и выходное напряжение равны нулю и достигают максимума при отсутствии перекрытия слоев. Чтобы избежать касания пьезоэлемента и диска применяется дополнительный пьезоэлемент на основе электроактивного диэлектрика, прикрепленного к вращающемуся диску. К электроактивному диэлектрику прикладывается напряжение, величина и фаза которого подбирается так, что при максимальной деформации основного пьезоэлемента, дополнительный сжимается за счет обратного пьезоэффекта, отводя от основного поверхность диска с металлическим слоем. Пьезомодули электроактивных диэлектриков на один-два порядка больше, чем у пьезокерамики. К сожалению, использовать их в качестве основных пьезоэлементов затруднительно из-за того, что большая величина их пьезомодуля связана с малым модулем Юнга: на 4 порядка меньше, чем у пьезокерамики, т.е. они сильно деформируются. Однако именно это обстоятельство позволяет использовать очень тонкие пленки электроактивных диэлектриков для контроля деформации основного пьезоэлемента. В качестве такого дополнительного пьезоэлемента можно использовать, например, акриловую ленту VHB-4910 компании ЗМ, силикон Nusil CF19-2186 и др. Если принять толщину такого электроактивного диэлектрика равной 0.1 мм, площадь равной площади основного пьезоэлемента, и типичный для силиконов модуль Юнга 0.15 МПа, то при амплитуде смещения поверхности основного пьезоэлемента 0.145 мкм, мощность, необходимая для контроля его деформации, составит 15 мВт. Такая малая величина связана с малой величиной модуля Юнга силиконов. Амплитуда управляющего напряжения UУПР в этом случае равна 27.5 В. Постоянное напряжение UСМ на фиг. 2 должно быть порядка 190 В. Его можно обеспечить с помощью электрета, подобно тому, как это делается в электретных микрофонах и наушниках.
Управление электроактивным диэлектриком осуществляется за счет доли выходной мощности основного пьезоэлемента посредством резистора RД и фазосдвигающей RC-цепочки на фиг. 2. Поскольку деформация пьезоэлемента и его выходное напряжение совпадают по фазе, то для отвода поверхности диска от пьезоэлемента достаточно подавать на электроактивный диэлектрик часть выходного гармонического напряжения, необходимого для сжатия диэлектрика амплитуды. В идеальном случае, без учета инерционных и переходных электрических свойств материала электроактивного диэлектрика, RC-цепочка не нужна. На практике, для согласованного перемещения поверхностей пьезоэлемента и диска, может понадобиться небольшой сдвиг фазы управляющего напряжения UУПР относительно выходного напряжения генератора на нагрузке RН. Этот сдвиг и производится RC - цепочкой на фиг. 2. При правильном подборе номиналов RД, R и С, можно обеспечить необходимый сдвиг фазы между выходным и управляющим напряжением UУПР, а также необходимую величину амплитуды последнего. При этом зазор между основным пьезоэлементом и диском все время остается постоянным, т.е. ни один из элементов генератора не совершает работы против силы Казимира.
При работе генератора в пьезоэлементах выделяется тепло из-за диэлектрических потерь, пропорциональных 1/Qa. Отвод тепла осуществляется за счет теплопроводности пластин 9, 10, 11 на фиг. 1, которые через элементы корпуса генератора связаны со внешней средой. Поскольку энергоотдача генератора тем выше, а диэлектрические потери тем ниже, чем выше добротность пьезоэлемента, то применение пьезоматериалов с высокой добротностью позволяет уменьшить их нагрев и тепловое расширение.
Конструкция генератора допускает работу не только в резонансном, но и высокочастотном режиме, когда частота nƒ намного выше ƒa, например, при значительном увеличении числа металлических пластин n. В высокочастотном режиме не нужно стабилизировать частоту вращения диска и управлять смещением его поверхности. Однако создание очень большого числа проводящих пластин на поверхностях диска и пьезоэлемента технически сложнее, а выходная мощность в целом меньше, чем в резонансном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2012 |
|
RU2499350C1 |
| Пьезоэлектрический реверсивный двигатель | 1977 |
|
SU642802A1 |
| Пьезоэлектрический реверсивный двигатель | 1977 |
|
SU661661A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1998 |
|
RU2138115C1 |
| Пьезоэлектрический трансформатор напряжения | 1978 |
|
SU771907A1 |
| ВСТРОЕННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ИСТОЧНИК ПЕРЕМЕННОГО ТОКА ДЛЯ СВОБОДНОВРАЩАЮЩИХСЯ ИНЕРЦИОННЫХ ОСЕСИММЕТРИЧНЫХ ТЕЛ | 2013 |
|
RU2537971C1 |
| Генератор постоянного тока | 1977 |
|
SU699590A1 |
| ГАЗОРАЗРЯДНЫЙ МОДИФИКАТОР УГЛЕРОДНЫХ НАНОМАТЕРИАЛОВ БАРАБАННОГО ТИПА | 2016 |
|
RU2648273C2 |
| Синхронный электрический привод | 1980 |
|
SU894823A1 |


Изобретение относится к электротехнике, к преобразователям энергии на основе материалов с пьезоэлектрическими свойствами. Технический результат состоит в упрощении конструкции за счет использования стандартных материалов, деталей и компонентов. Резонансный пьезоэлектрический генератор тока содержит помещенные в вакуумный объем статор с закрепленными на нем пьезоэлементами с металлическими пластинами и ротор с ответными металлическими пластинам, подбором соотношения между числом металлических пластин на статоре и роторе и частотой вращения последнего. При вращении ротора, приводящем к периодическому перекрытию пластин статора и ротора, пьезоэлементы статора совершают вынужденные колебания, вызываемые эффектом Казимира между металлическими пластинами статора и ротора, происходящие на резонансной частоте пьезоэлементов. 6 ил.
Резонансный пьезоэлектрический генератор тока, содержащий помещенные в вакуумный объем статор, на котором закреплены пьезоэлементы с металлическими пластинами, и ротор, выполненный в виде вала, на котором закреплен диск или барабан с ответными металлическими пластинами, характеризующийся тем, что подбором определенного соотношения между числом металлических пластин на статоре и роторе и частотой вращения последнего, при вращении ротора, приводящем к периодическому перекрытию пластин статора и ротора, пьезоэлементы статора совершают вынужденные колебания, вызываемые эффектом Казимира между металлическими пластинами статора и ротора, происходящие на резонансной частоте пьезоэлементов, что приводит к генерации пропорционального электрического напряжения на их электродах вследствие прямого пьезоэлектрического эффекта.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2012 |
|
RU2499350C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1993 |
|
RU2113757C1 |
| DE 3541084 A1, 06.08.1987 | |||
| Генератор постоянного тока | 1977 |
|
SU699590A1 |
| US 2007241470 A1, 18.10.2007 | |||
| JP 2004197727 A, 17.07.2004 | |||
| US 2003090752 A1, 15.05.2003 | |||
| JP 2001178164 A, 29.06.2001 | |||
| СИСТЕМА ДОМАШНЕЙ СИГНАЛИЗАЦИИ С ДВУХПРОВОДНЫМ ПОДКЛЮЧЕНИЕМ ПОТРЕБИТЕЛЯ | 2003 |
|
RU2325778C2 |
| WO 2008039176 A2, 03.04.2008 | |||
| US 7411772 B1, 12.08.2008 | |||
| US 2008396437 A1, 04.12.2008. | |||

