(54) СИНХРОННЫЙ ЭЛЕКТРИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1128292A1 |
| Пьезоэлектромагнитный шаговый двигатель для перемещения носителя информации | 1988 |
|
SU1583996A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| РЕЗОНАНСНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2014 |
|
RU2577767C2 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| Вибрационный электропривод | 1986 |
|
SU1410263A1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
1
Изобретение относится к синхронным электрическим проводам на базе пьезоэлектрических микродвигателей и может быть использовано в часовых механизмах, системах автоматики и т.д.
известен электрический привод на базе пьезоэлектрического двигателя, содержащего статор с пьезоэлектрическим осциллятором, опирающимся на гладкую поверхность ротора, и источник возбуждения осциллятора. С использованием системы авторегулирования может быть обеспечена стабильность скорости такого привода 0,01%
синхронным, поэтому при использовании его в следящих системах неизбежно накопление ошибки.
Известен синхронный электрический привод, содержащий статор с пьезоэлектрическим осциллятором, ротор, на цилиндрическую поверхность которого опирается осциллятор, и источник возбуждения осциллятора,
В известном приводе осциллятор выполнен из нескольких пьезоэлементов с отдельными для каждого электродами, подключенными к многофазному
ИСТОЧНИКУ возбуждения. На конце-осциллятора укреплен шток с ведущим копесом, которое сопряжено с поверхностью ротора, выполненного в виде стакана. При подключении многофазного источника возбуждения конец осциллятора совершает движение по круговой траектории, а вместе с ним, не вращаясь, так же движется и ведуtoщее колесо. В результате взаимодействия ведущего колеса и ротора.последний приводится в синхронное вращение 2 .
Однако конструкция известного
15 двигателя HR позволяет получить достаточно больших мощностей на его валу. Известно, что максимальная мощность Р двигателя пропорциональна прои 3 в.еде н и ю
20
,
где F - предельная сила, развиваемая пьезоэлементом I - максимальное удлинение (или
изгиб) пьезоэлемента;
25 f - рабочая частота.
Предельная сила F и максимальное 1 длинение 1 определяются пределом прочности пьезоматериала. Следовательно, для увеличения мощности на 30 валу необходимо увеличивать рабочую
частоту двигателя. Предельная рабочая частота определяется конструкцией двигателя и лежит в диапазоне 500-1000 Гц. При этом мощность на валу двигателя достигает 0,05 Вт. Дальнейшее увеличение рабочей частоты не дает увеличения мощности, так как значительно уменьшаются габариты осциллятора, а следовательно, и объем пьезокерамики, что в свою очередь приводит к уменьшению мощности двигателя.
: Кроме.малой мощности известный двигатель обладает низким значением cos f , так как на частотах 60-1000 Гц практически невозможно компенсировать, емкостную составляющую входного сопротивления пьезоэлементов.Кроме того, он имеет большие габариты, сложную конструкцию, большие частоты вращения ротора (3000-60000 мин) что неудобно для практических применений
Цель изобретения - увеличение мощности привода, а также увеличение cosf, уменьшение габаритов, упт рощение конструкции, уменьшение частоты вращения ротора.
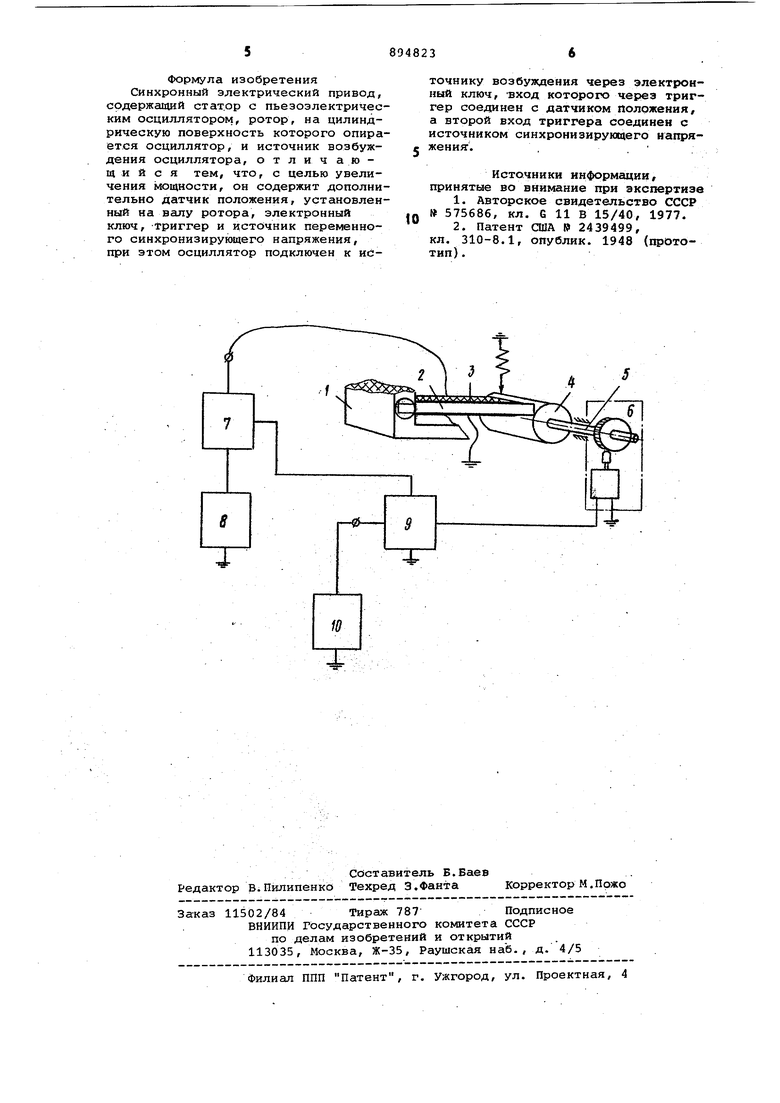
Поставленная цель достигается тем, что синхронный электрический привод, содержащий статор с пьезоэлектрическим осциллятором, ротор, на цилиндрическую поверхность которого опирается осциллятор, и источник возбуждения осциллятора, дополнительно содержит датчик положения, установленный на валу ротора, электронный ключ, триггер и источник переменного синхронизирующего напряжения, при этом осциллятор подключен к источнику возбуждения через электронный ключ, вход которого через триггер соединен с датчиком п.оложения, а второй вход триггера соединен с ИСТОЧНИКОМ синхронизирующего напряжения. . . На чертеже представлена блок-схема синхронного электрического привода.
Привод содеришт статор 1, в котором закреплен пье.зоэлектрический осциллятор 2, выполненный, например в виде пьезоэлектрической пластины (диска или цилиндра) с нанесенными на ее сторонах электродами 3, поляризованной по толщине (поляризация показана стрелкой). Осциллятор опирается на гладкую поверхность цилиндрического ротора 4, который закреплен йа в-алу 5. Последний-установлен в подшипниках (не показаны). На валу 5 установлен датчик 6 положения вала, конструкция которого может быть любой, например, электромагнитный датчик, растровый оптический датчик, пьезоэлектрический датчик или др.
Пьезоэлектрический осциллятор 2 подключен через управляемый ключ 7
к источнику 8 возбуждения осциллятора. Управляющий вход электронного ключа 7 соединен с выходом триггера 9 , один вход которого соединен с выходом датчика 6 положения, а другой его вход подключен к источнику 10 переменного (синхронизирующего) напряжения.
Синхронный электрический привод работает следующим образом.
0 От источника 10 переменного напряжения на вход триггера 9 подается управляющий импульс.. Триггер 9 опрокидывается и открывает электронный ключ 7. При этом.от источника
5 8 возбуждения осциллятора через электронный ключ 7 на электроды, 3 осциллятора 2 подается электрическое напряжение. Осциллятор 2 начинает вращать ротор 4 и вал 5. При по0 аороте вала 5 на определенный угол (заданный конструкцией датчика 6 положения) датчик положения вырабатывает сигнал остановки двигателя, который подается с выхода датчика 6
5 на второй вход триггера 9. Триггер 9 переключается в исходное состояние и закрывает электронный ключ 7. С электродов 3 осциллятора 2 снимается возбуждающее его напряжение и ротор 4 прекращает вращаться. Через
некоторое время источник 10 переменного напряжения вырабатывает следующий управляющий импульс и процесс повторяется в том же порядке.
5 в конструкции синхронного электрического привода функции источника синхронизирующего переменного напряжения и источника возбуждения осциллятора выполняют два различных устройства. Источник возбуждения осциллятора возбуждает осциллятор на его рабочей частоте. Источник переменного синхронизирующего напряжения через триггер и управляемый электронный ключ подключает источник возбуждения осциллятора к осциллятору. Отключение осциллятора происходит с помощью датчика положения ротора, который через триггер-и электронный ключ отключает осциллятор. Рабочая частота осциллятора выбирается достаточно высокой (50-500 кГц). Это позволяет максимально увеличить мощность двигателя (до 50-100 Вт). Частота синхронизирующего напряжения может быть предельно низкой и не влияет на максимальную мощность, развиваемую двигателем. Высокая частота возбуждения осциллятора позволяет простым включением компенсирующей индуктивности компенсировать ёмкостную составляющую входного сопротивления двигателя и таким образом получить . Кроме того, увеличение частоты возбуждения позволяет
5 уменьшить габариты устройства.
формула изобретения Синхронный электрический привод, содержащий стат.ор с пьезоэлектрическим осциллятором, ротор, на цилиндрическую поверхность которого опирается осциллятор, и источник возбуждения осциллятора, о т л и ч а ю щ и и с я тем, что, с целью увеличения мощности, он содержит дополнительно датчик положения, установленный на валу ротора, электронный ключ, триггер и источник переменного синхронизирующего напряжения, при этом осциллятор подключен к источнику возбуждения через электронный ключ, ВХОД которого через триггер соединен с датчиком положения, а второй вход триггера соединен с источником синхронизирующего напряжения. , .
Источники информации, принятые во внимание при экспертизе
кл. 310-8.1, опублик. 1948 (прототип).
5
