ПРИОРИТЕТЫ
Заявка на патент США серийный № предварительной заявки на патент 61/386094, подана 24.09.2010, озаглавлена «Шарнирный хирургический инструмент», информация о котором включена посредством ссылки в этот документ.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Ряд хирургических инструментов включает в себя режущий ткани элемент и один или несколько элементов, которые проводят в ткани радиочастотную (ВЧ) энергию (например, для коагуляции или лигации). Примером такого устройства является ENSEAL® легирующее устройство от Ethicon Endo-Surgery, Inc, Цинциннати, штат Огайо. Дополнительные примеры таких устройств и смежные области раскрыты в патенте США № 6500176, озаглавленном «Электрохирургические системы и оборудование для лигации», выданном 31 декабря 2002 г., информация о котором включена посредством ссылки в этот документ; патент США № 7112201 озаглавлен «Электрохирургическое оборудование и методы использования», выдан 26.09.2006, информация о котором включена посредством ссылки в этот документ; патент США № 7125409 озаглавлен «Электрохирургический рабочий конец с контролируемой подачей энергии», выдан 24.10.2006, информация о котором включена посредством ссылки в этот документ; патент США № 7169146 озаглавлен «Электрохирургический зонд и способ его использования», выдан 30.01.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7186253 озаглавлен «Структура электрохирургического захвата c контролируемой подачей энергии», выдан 6.03.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7189233 озаглавлен «Электрохирургический инструмент», выдан 13.03.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7220951 озаглавлен «Поверхности для хирургической сварки и методы их использования», выдан 22.05.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7309849 озаглавлен «Полимерные композиции, выказывающие свойства ПТК и способы производства», выдан 18.12.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7311709 озаглавлен «Электрохирургический инструмент и способы применения», выдан 25.12.2007, информация о котором включена посредством ссылки в этот документ; патент США № 7354440 озаглавлен «Электрохирургический инструмент и способы применения», выдан 8.04.2008, информация о котором включена посредством ссылки в этот документ; патент США № 7381209 озаглавлен «Электрохирургический инструмент», выдан 3.06.2008, информация о котором включена посредством ссылки в этот документ; патент США № 2011/0087218 озаглавлен «Хирургический инструмент, содержащий первую и вторую системы привода, включающиеся общим триггером», опубликован 14.04.2011, информация о котором включена посредством ссылки в этот документ; и приложение к патенту США № 13/151181 озаглавлено «Электрохирургическое оборудование с механическим приводом, механической и электрической обратной связью», подано 2.06.2011, информация о котором включена посредством ссылки в этот документ.
В дополнение к этому ряд хирургических инструментов включает в себя ствол, имеющий шарнирное сочленение частей, что предусматривает расширенные возможности позиционирования для концевого зажима, который расположен дистально по отношению к шарнирной части ствола. Примеры таких устройств включают в себя различные модели ENDOPATH® endocutters от Ethicon Endo-Surgery, Inc., Цинциннати, штат Огайо. Дополнительные примеры таких устройств и связанных с ними понятий раскрыты в патенте США № 7380696, который озаглавлен «Шарнирные хирургические сшивающие аппараты с режуще-сшивающим E-образным механизмом из двух частей» 3.06.2008, информация о котором включена посредством ссылки в этот документ; патент США № 7404508, озаглавлен «Сшивающее и режущее хирургическое оборудование», выдан 29.07.2008, информация о котором включена посредством ссылки в этот документ; патент США № 7455208, озаглавлен «Хирургический инструмент с шарнирным стволом с жесткими опорами режуще-сшивающего механизма», выдан 25 ноября 2008 г., информация о котором включена посредством ссылки в этот документ; патент США № 7506790, озаглавлен «Хирургический инструмент, включающий шарнирный механизм с электроприводом», выдан 24 марта 2009 г., информация о котором включена посредством ссылки в этот документ; патент США № 7549564, озаглавлен «Хирургический сшивающий аппарат с шарнирным концевым захватом», выдан 23 июня 2009 г., информация о котором включена посредством ссылки в этот документ; патент США № 7559450, озаглавлен «Хирургический инструмент с шарнирным механизмом, управляемый переносом жидкости», выдан 14 июля 2009 г., информация о котором включена посредством ссылки в этот документ; патент США № 7654431 озаглавлен «Хирургический инструмент с управляемым латерально скользящим шарнирным элементом», выдан 2 февраля 2010 г., информация о котором включена посредством ссылки в этот документ; патент США № 7780054, озаглавлен «Хирургический инструмент с движущимся горизонтально приводом ствола, соединенным с поворотным шарнирным сочленением», выдан 24 августа 2010 г., информация о котором включена посредством ссылки в этот документ; патент США № 7784662, озаглавлен «Хирургический инструмент с шарнирным стволом с затвором с одним стержнем и заземлением корпуса с двумя стержнями», выдан 31 августа 2010 г., информация о котором включена посредством ссылки в этот документ; и патент США № 7798386, озаглавлен «Крышка шарнирного сочленения хирургического инструмента», выдан 21 сентября 2010 г., информация о котором включена посредством ссылки в этот документ.
В то время как многие медицинские приборы были произведены и использованы, считается, что никто из предыдущих изобретателей не производил и не использовал изобретение, описанное в прилагаемой формуле.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В то время как описание содержит формулу изобретения, которая подробно показывает и, несомненно, заявляет эту технологию, считается, что эта технология будет лучше понятна из последующего описания конкретных примеров, взятых в сочетании с фигурами, в которых номер ссылки соответствует номеру фигуры:
фиг.1 изображает вид сбоку типового электрохирургического медицинского оборудования;
фиг.2 изображает перспективу концевого зажима устройства на фиг.1, в открытой конфигурации;
фиг.3 изображает другую перспективу концевого зажима устройства на фиг.1, в открытой конфигурации;
фиг.4 изображает поперечное сечение вида сзади концевого зажима на фиг.2, в закрытой конфигурации и с лезвием в дистанцированном положении;
фиг.5 изображает перспективу еще одного типового электрохирургического медицинского оборудования с шарнирной рукояткой управления;
фиг.6 изображает поперечное сечение вида сзади ствола в сборе устройства на фиг.5, разрез по линии 6-6 фиг.5;
фиг.7 изображает перспективу компонентов ствола в сборе и концевого зажима устройства на фиг.5;
фиг.8 изображает перспективу неподвижного звена ствола в сборе устройства на фиг.5;
фиг.9 изображает частичную перспективу шарнирного сочленения элемента системы управления устройства на фиг.5, вдоль одной стороны неподвижного звена;
фиг.10 изображает частичную перспективу шарнирного сочленения элемента системы управления устройства на фиг.5, вдоль другой стороны неподвижного звена;
фиг.11 изображает вид сверху шарнирного сочленения элемента системы управления на фиг.9-10;
фиг.12 изображает частичную перспективу шарнирного сочленения элемента системы управления на фиг.9, заключенного в корпус;
фиг.13 изображает вид сбоку рукоятки в сборе устройства на фиг.5, с полусмещенным корпусом;
фиг.14 изображает вид сбоку шарнирного сочленения элемента системы управления рукоятки в сборе на фиг.13, с полуснятым корпусом рукоятки управления шарнирного сочленения;
фиг.15 изображает перспективу шарнирного элемента системы управления рукоятки в сборе на фиг.13, соединенного с системой управления шарнирного сочленения на фиг.9-10;
фиг.16 изображает боковое поперечное сечение шарнирного элемента системы управления на фиг.15, разрез по линии 16-16 фиг.15;
фиг.17A изображает частичное поперечное сечение шарнирного сочленения элемента системы управления и шарнирного сочленения частей ствола устройства на фиг.5, с шарнирным соединением частей, в основном линейной конфигурации;
фиг.17B изображает частичное поперечное сечение элементов на фиг.17A, с шарнирным сочленением частей на первом этапе шарнирного соединения;
фиг.17C изображает частичное поперечное сечение элементов на фиг.17A, с шарнирным сочленением частей на втором этапе шарнирного соединения;
фиг.18 изображает боковое сечение другого типового электрохирургического медицинского оборудования, с помещенным под углом шарниром рукоятки управления;
фиг.19 изображает поперечное сечение шарнирного сочленения элементов системы управления в рукоятке в сборе устройства на фиг.18;
фиг.20 изображает развернутый вид в перспективе одного из элементов системы управления шарнирного сочленения на фиг.19;
фиг.21 изображает перспективу альтернативного примера шарнирного сочленения элементов системы управления;
фиг.22 изображает перспективу еще одного электрохирургического медицинского оборудования, с полусферически вращающейся рукояткой управления шарнирного сочленения;
фиг.23 изображает поперечное сечение шарнирного сочленения элементов системы управления устройства на фиг.22, разрез по линии 23-23 на фиг.22;
фиг.24 изображает перспективу шарнирного сочленения элементов системы управления на фиг.23;
фиг.25 изображает развернутый вид в перспективе корпусных компонентов устройства на фиг.22;
фиг.26 демонстрирует изображение перспективы другого типового электрохирургического оборудования, с вращающимся контрольным рулем шарнирного сочленения;
фиг.27 изображает перспективу шарнирного сочленения элементов системы управления устройства на фиг.26;
фиг.28 изображает другую перспективу шарнирного сочленения элементов системы управления устройства на фиг.26;
фиг.29 изображает вид сверху некоторых элементов системы управления шарнирного сочленения фиг.27-28;
фиг.30 изображает перспективу внешней части рукоятки в сборе устройства на фиг.5 с полусмещенным корпусом рукоятки в сборе;
фиг.31 изображает внешнюю часть типового электропривода фиг.30;
фиг.32 изображает альтернативный типовой электропривод;
фиг.33 изображает частичное поперечное сечение электропривода фиг.32, установленного на внешней части фиг.30;
фиг.34 изображает другой альтернативный типовой электропривод;
фиг.35 изображает вид сбоку проксимальной части рукоятки в сборе устройства на фиг.5 с полусмещенным корпусом рукоятки в сборе;
фиг.36 изображает перспективу проксимальной части типового электропривода фиг.35;
фиг.37A изображает вид сбоку части рукоятки в сборе, включающей типовой вспомогательный возвратный механизм возврата камеры функционально в первоначальное положение;
фиг.37B изображает вид сбоку компонентов на фиг.37А, возвратный вспомогательный механизм возврата камеры функционально во второе положение; и
фиг.37C изображает вид сбоку компонентов на фиг.37А, возвратный вспомогательный механизм возврата камеры функционально в третье положение.
Чертежи не предназначены для ограничения каким-либо образом, предполагается, что различные модификации устройства могут быть реализованы множеством способов, в том числе необязательно изображенные на чертежах. Прилагаемые фигуры - составляющая часть детального изображения некоторых компонентов данного устройства, и вместе с описанием помогают объяснить принцип устройства изобретения; это станет понятным, не смотря на то, что это устройство не ограничено показанной конструкцией.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Следующее описание отдельных примеров устройства не должно быть использовано с целью ограничения его возможностей. Другие примеры, параметры, особенности, модификации и преимущества устройства станут очевидными для специалистов в данной области из последующих описаний, в виде иллюстрации, одной из лучших предполагаемых моделей реализации устройства. Как будет реализовано описанное здесь устройство - функция различных и наглядных аспектов, без отклонения от устройства. Соответственно, чертежи и описания должны быть рассмотрены как оригинальные, а не для ограничения каким-либо образом.
Также понятно, что любые виды идей, выражений, модификаций, примеров и т.д., описанных в данном документе, могут быть соединены с любыми видами идей, выражений, модификаций, примеров и т.д., которые описаны в данном документе. Поэтому последовательно описанные идеи, выражения, модификации, примеры и т.д. не могут рассматриваться отдельно друг от друга. Идеи в данном документе могут быть объединены различными удобными способами, что будет очевидно специалистам в данной области. Такие модификации и изменения предполагают включение в пункт формулы изобретения.
I. Типовое электрохирургическое оборудование с шарнирной частью
Фиг.1-4 показывают типовой электрохирургический инструмент (10), который создан и функционирует в соответствии, по меньшей мере, с некоторыми из идей из патента США № 6500176; патент США № 7112201; патент США № 7125409; патент США № 7169146; патент США № 7186253; патент США № 7189233; патент США № 7220951; патент США № 7309849; патент США № 7311709; патент США № 7354440; патент США № 7381209; патент США № 2011/0087218 и/или дополнение к патенту США № 13/151181. Как описано в данном документе и будет более детально описано ниже, электрохирургический инструмент (10) выполнен с возможностью резать ткань и легировать или спаивать ткань (например, кровеносных сосудов и т.д.) практически одновременно. Другими словами, электрохирургический инструмент (10) действует аналогично сшивающему аппарату, типа эндоскопический режущий аппарат, кроме того, электрохирургический инструмент (10) обеспечивает спайку тканей путем применения биополярной высокочастотной энергии вместо обеспечения соединения ткани сшивающими скобами. Также должно быть понятно, что электрохирургический инструмент (10) может иметь различные структурные и функциональные сходства с легирующим устройством ENSEAL® компании Ethicon Endo-Surgery, Inc., Цинциннати, штат Огайо. К тому же электрохирургический инструмент (10) может иметь различное структурное и функциональное сходство с устройствами, указанными в различных ссылках, включенных в данный документ. При условии, что есть некоторая степень сходства между идеями в ссылках, приведенных в данном документе, легирующее устройство ENSEAL® от Ethicon Endo-Surgery, Inc., Цинциннати, штат Огайо, и последующими идеями, относящимися к электрохирургическому инструменту (10), нет смысла считать прототипом какие-либо описания в данном документе. Несколько нижеприведенных идей будут фактически выходить за рамки идей в ссылках, прилагаемых к данному документу и легирующего устройства ENSEAL® от Ethicon Endo-Surgery, Inc., Цинциннати, штат Огайо.
A. Типовые ручка и ствол
Данный пример электрохирургического инструмента (10) включает рукоятку (20), ствол (30), выступающий из ручки (20), и концевой зажим (40), расположенный на конце ствола (30). Ручка (20) в данном примере пистолетного типа (22) включает вращающийся триггер (24), пусковую кнопку (26) и шарнирное управление (28). Триггер (24) вращается в сторону пистолетной рукоятки и обратно (22) для выборочного включения концевого зажима (40); более детальное описание приводится ниже. Пусковая кнопка (26) предназначена для выборочной активации высокочастотной схемы, которая связана с концевым зажимом (40), что также будет описана ниже более детально. В некоторых вариантах пусковая кнопка (26) также служит механической блокировкой триггера (24), таким образом триггер (24) не может быть полностью приведен в действие, пока кнопка (26) будет зажата. Примеры задействования такой блокировки приведены в одной или более ссылках, приложенных к данному документу. Должно быть понятно, что рукоятка пистолетного типа (22), триггер (24) и кнопка (26) могут быть модифицированы, заменены, дополнены и т.д. любым подходящим способом, и что описания таких компонентов в данном документе носят чисто иллюстративный характер. Шарнирное сочленение управления (28) в данном примере предназначено для выборочного контроля за шарнирной частью (36) ствола (30), которые ниже будут описаны более детально. Различные примеры образцов шарнирного управления (28) также могут быть взяты из приведенных ниже более детальных описаний, вместе с тем дополнительные примеры будут видимы тем специалистам в данной области, чьи идеи показаны в данном документе.
Ствол (30) в данном примере включает внешнюю оболочку (32) и шарнирную часть (36). Шарнирная часть (36) предназначена для выборочного позиционирования концевого зажима (40) под различными относительными углами к продольной оси, заданной оболочкой (32). Ряд примеров образцов шарнирной части (36) и других компонентов ствола (30) можно будет найти в приведенном ниже более детальном описании, вместе с тем дополнительные примеры будут видимы тем специалистам в данной области, чьи идеи показаны в данном документе. К примеру, должно быть понятно, что различные компоненты, которые предназначены приводить в движение шарнирную часть (36), могут проходить под оболочкой (32). В нескольких вариантах ствол (30) может поворачиваться вокруг продольной оси ограниченной оболочкой (32), связан с ручным блоком (20), при помощи ручки (34). Такое вращение должно обеспечить вращение концевого зажима (40) и ствола (30) как единого целого. В других вариантах ручка (34) предназначена вращать концевой зажим (40) без вращения какой-либо части ствола (30), проксимальной к шарнирному сочленению (36). Как другой, носящий иллюстративный характер, пример, электрохирургический инструмент (10) может включать управление вращением, которое обеспечит вращаемость ствола (30) и концевого зажима (40) как единого целого; и также другое управление вращением, которое обеспечит вращаемость концевого зажима (40) без вращения какой-либо части ствола (30), проксимальной к шарнирной части (36). Другие подходящие схемы вращения будут видны тем специалистам в данной области, чьи идеи представлены в данном документе. Конечно, вращающиеся компоненты при желании просто могут быть исключены.
B. Типовой концевой зажим
Концевой зажим (40) в данном примере включает в себя первую браншу (42) и вторую браншу (44). В данном примере вторая бранша (44) по существу закреплена как продолжение ствола (30), в то время как первая бранша (42) вращается относительно ствола (30) по направлению и обратно от второй бранши (44). В некоторых вариантах различные приводы, такие как стержни, тросы могут проходить сквозь оболочку (32) и соединяться с первой браншей (42) при поворотном соединении (43), так что продольное движение привода через ствол (30) обеспечивает вращение первой бранши (42) относительно ствола (30) и относительно второй бранши (44). Конечно, бранши (42, 44) могут иметь любой другой подходящий вид движения и могут быть приведены в действие любым другим подходящим способом. Только в качестве примера и как будет описано ниже более детально, бранши (42, 44) могут быть приведены в действие и таким же образом закрыты продольным перемещением режуще-сшивающего элемента (60), так что привод в некоторых версиях может быть просто устранен.
Как лучше всего видно на фиг.2-4, первая бранша (42) образует продольно вытянутый удлиненный сегмент (46), в то время как вторая бранша (44) также образует продольно вытянутый удлиненный сегмент (48). В дополнение верхняя сторона первой бранши (42) представляет собой первый поверхностный электрод (50), в то время как нижняя часть второй бранши (44) представляет собой второй поверхностный электрод (52). Поверхностные электроды (50, 52) соединены с источником электрического напряжения (80) посредством одного или более проводников (не показано), которые тянутся вдоль длины ствола (30). Источник электрического напряжения (80) способен передавать радиочастотную энергию к первому поверхностному электроду (50) первой полярности и ко второму поверхностному электроду (52) второй (противоположной) полярности, так что ток высокой частоты проходит между поверхностными электродами (50, 52) и посредством этого через ткани, захваченные браншами (42, 44). В некоторых вариантах режуще-сшивающий элемент (60) служит электрическим проводником, который взаимодействует с поверхностными электродами (50, 52) (например, как возврат тока через землю) для доставки биполярной ВЧ энергии, заключенной между браншами (42, 44). Источник электрического напряжения (80) может быть отделен от электрохирургического инструмента (10) или может быть встроен в электрохирургический инструмент (10) (например, в ручку (20) и т.д.), как описано в одной или более ссылках, включенных в данный документ, или другим способом. Контроллер (82) регулирует подачу энергии от источника электрического напряжения (80) к поверхностным электродам (50, 52). Контроллер (82) также может быть отделен от электрохирургического инструмента (10) или может быть встроен в электрохирургический инструмент (10) (например, в ручку (20) и т.д.), как описано в одной или более ссылках, включенных в данный документ, или другим способом. Должно быть понятно, что поверхностные электроды (50, 52) могут быть представлены в различных вариантах альтернативных мест положений, конфигураций и отношений.
Как лучше видно на фиг.4, нижняя сторона первой бранши (42) включает продольно вытянутую канавку (58), примыкающую к пазу (46), в то время как верхняя сторона второй бранши (44) включает продольно вытянутую канавку (58), примыкающую к пазу (48). Фиг.2 показывает верхнюю часть первой бранши (42), включающую множество мелкомодульных зубчатых соединений (46). Должно быть понятно, что нижняя сторона второй бранши (44) может включать дополнительные мелкомодульные зубчатые соединения, ячейки с мелкомодульным зубчатым соединением (46), чтобы повысить сжатие ткани, захваченной браншами (42, 44) без необходимости разрывать ткань. Фиг.3 показывает пример мелкомодульного зубчатого соединения (46) в первой бранше (42) преимущественно углубления с мелкомодульными зубчатыми соединениями (48), во второй бранше (44) преимущественно выступы. Конечно, мелкомодульные зубчатые соединения (46, 48) можно взять в любой удобной форме, или они могут быть полностью исключены. Также должно быть понятно, что мелкомодульные зубчатые соединения (46, 48) могут быть изготовлены из не проводящих электричество, или изоляционных, материалов, таких как, например, пластик, стекло и/или керамика, и могут включать в себя обработку политетрафторэтиленом, скользящим веществом или другими веществами, главным образом для предохранения ткани от приклеивания к браншам (42, 44).
С браншами (42, 44) в закрытой позиции ствол (30) и концевой зажим (40) откалиброваны и настроены соответственно троакарам, имеющим различный внутренний диаметр, так как такой электрохирургический инструмент (10) используется в малоинвазивной хирургии, конечно же электрохирургический инструмент (10) также может быть использован в открытой операции, если необходимо. Только в качестве примера с браншами (42, 44) в закрытой позиции ствол (30) и концевой зажим (40) могут иметь внешний диаметр приблизительно 5 мм. Как вариант, ствол (30) и концевой зажим (40) могут иметь любой другой внешний диаметр (например, от 2 до 20 мм и т.д.).
Как другой вариант, носящий чисто иллюстративный характер, каждая бранша (42, 44) или обе бранши (42, 44) могут включать в себя, по меньшей мере, один порт, перепускной канал, трубку и/или другое устройство, пригодное для отвода пара, дыма и/или других газов/паров и т.д. из операционного поля. Такие элементы могут быть соединены с источником всасывания, таким как источник энергии, или источником без рукоятки (20) и т.д. К тому же концевой зажим (40) может включать одно или более охлаждающих ткань устройств (не показано), что уменьшает степень или распространение термального расширения под воздействием концевого зажима (40) на прилегающую ткань, когда поверхностные электроды (50, 52) включены. Различные подходящие формы, которые могут принять такие охлаждающие устройства, будут доступны специалистам в данной области с учетом идей в данном документе.
В некоторых вариантах концевой зажим (40) включает один или несколько датчиков (не показано), которые настроены определять различные параметры концевого зажима (40), учитывающие, но не ограничивая, температуру прилегающей ткани, электрическое сопротивление или сопротивление прилегающей ткани, перепад напряжения прилегающей ткани, оказываемое воздействие на бранши (42, 44) прилегающей тканью и т.д. Только в качестве примера концевой зажим (40) может включать один или более термисторов с положительным температурным коэффициентом (ПТК) корпуса (54, 56) (например, ПТК полимер и т.д.), расположенных смежно к электродам (50, 52) и/или в другом месте. Данные с датчиков могут быть переданы контроллеру (82). Контроллер (82) может обрабатывать такие данные различными способами. Только в качестве примера контроллер (82) может модулировать или иным образом изменять радиочастотную энергию, поставляемую к поверхностным электродам (50, 52), на основе, по меньшей мере, части данных, полученных от одного или более датчиков концевого зажима (40). В дополнение или в качестве альтернативы, контроллер (82) может предупредить пользователя одним или несколькими режимами, с помощью аудио- и/или визуальных устройств обратной связи (например, динамик, подсветка, экран и т.д.), основываясь на, по меньшей мере, части данных, полученных от одного или более датчиков концевого зажима (40). Следует также иметь в виду, что некоторые виды датчиков не обязательно должны быть связаны с контроллером (82) и могут просто оказывать сугубо ограниченное воздействие концевым зажимом (40). Например, корпуса термистора ПТК (54, 56) концевого зажима (40) могут автоматически снизить поток энергии к поверхностным электродам (50, 52), так как температура ткани и/или концевого зажима (40) увеличивается, тем самым снижая вероятность перегрева. В некоторых таких вариантах ПТК элемент термистора последовательно подсоединен к источнику питания (80) и поверхностному электроду (50, 52); ПТК термистор обеспечивает повышенное сопротивление (сокращение потока тока) в ответ на повышение температурного порога. Кроме того, следует понимать, что поверхностные электроды (50, 52) могут быть использованы в качестве датчиков (например, измерять сопротивление тканей и т.д.). Различные виды датчиков, которые могут быть включены в электрохирургический инструмент (10), будут доступны специалистам в данной области в связи с идеями приведенными здесь. Точно так же различные действия, которые могут быть совершены контроллером (82) с данными датчиков или другим путем, будут доступны специалистам в данной области в связи с идеями, приведенными здесь. Другие подходящие варианты для концевого зажима (40) будут доступны специалистам в данной области с учетом приведенных здесь идей.
C. Типовой режуще-сшивающий элемент
Кроме того, как видно на фиг.2-4, электрохирургический инструмент (10) данного примера включает в себя режуще-сшивающий элемент (60), который продольно перемещается вдоль части длины концевого зажима (40). Режуще-сшивающий элемент (60) соосно расположен внутри ствола (30), вытянут по всей длине ствола (30) и продольно двигается внутри ствола (30) (в том числе в шарнирной части (36) в данном примере), хотя следует понимать, что режуще-сшивающий элемент (60) и ствол (30) могут иметь любое другое подходящее соотношение. Режуще-сшивающий элемент (60) включает в себя острое внешнее лезвие (64), верхний фланец (62) и нижний фланец (66). Как хорошо видно на фиг.4, внешнее лезвие (64) протянуто сквозь пазы (46, 48) браншей (42, 44) с верхнего фланца (62), расположенного над браншей (44) в углублении (59), и нижнего фланца (66), расположенного под браншей (42) в углублении (58). Конфигурация внешнего лезвия (64) и фланцев (62, 66) основана на «I-образном» типе поперечного сечения дистального конца режуще-сшивающего элемента (60). В то время как фланцы (62, 66) продольно вытянуты только по небольшой части длины режуще-сшивающего элемента (60) в данном примере следует понимать, что фланцы (62, 66) могут быть продольно вытянуты на любую удобную длину режуще-сшивающего элемента (60). Кроме того, в то время как фланцы (62, 66) расположены вдоль внешней части браншей (42, 44), фланцы (62, 66) могут быть альтернативно расположены в соответствующих пазах внутри браншей (42, 44). Например, каждая бранша (42, 44) может включать «Т»-образный паз, с частями внешнего лезвия (64), которые расположены в одной вертикальной части каждого «Т»-образного паза, и с фланцами (62, 66), расположенными в горизонтальной части "Т"-образных пазов. Различные другие подходящие конфигурации и соотношения будут доступны специалистам в данной области с учетом представленных здесь идей.
Внешнее лезвие (64) в значительной степени острое настолько, что внешнее лезвие будет легко резать ткань, захваченную браншами (42, 44). Внешнее лезвие (64) так же заземлено в данном примере обеспечивающее путь возврата для ВЧ энергии, как описано в другом месте данного документа. В некоторых других версиях внешнее лезвие (64) служит в качестве активного электрода. В дополнение или в качестве альтернативы внешнее лезвие (64) может быть выборочно подключено к источнику питания ультразвуковой энергии (например, гармонические колебания примерно в 55,5 кГц и т.д.).
«I-образный» тип конфигурации дистального конца режуще-сшивающего элемента (60) обеспечивает закрытие браншей (42, 44), так как режуще-сшивающий элемент (60) выдвинут внешне. В частности, фланец (62) принуждает браншу (44) поворачиваться к бранше (42), так как режуще-сшивающий элемент (60) выдвинут из проксимального положения (фиг.1-3) в дистальное положение (фиг.4) опоры вплотную к выемке (59), образованной в бранше (44). Это смыкающее бранши действие (42, 44) режуще-сшивающего элемента (60) может произойти до того, как внешнее лезвие (64) достигнет тканей, захваченных браншами (42, 44). Такое проведение столкновений режуще-сшивающего элемента (60) позволяет уменьшить усилие, необходимое для сжатия рукоятки (24), чтобы привести в движение режуще-сшивающий элемент (60) на полный рабочий такт. Иными словами, в некоторых версиях режуще-сшивающий элемент (60), возможно, уже преодолел первоначальное сопротивление, необходимое для закрытия браншей (42, 44) на ткани, из-за прежде возникшего сопротивления от ткани, захваченной между зажимами. Конечно, предусмотрена любая другая конструктивная возможность.
В данном примере фланец (62) конфигурирован поднимать отклоняемую браншу (44), чтобы открыть браншу (42), когда режуще-сшивающий элемент (60) оттянут в проксимальное положение и держит браншу (42), т.е. открытие происходит, когда режуще-сшивающий элемент (60) остается в проксимальном положении. Эта отводящая возможность может облегчить использование концевого зажима (40) для разделения слоев ткани, выполнения тупого вскрытия и т.д., сжимая бранши (42, 44), несмотря на закрытое положение. В некоторых других версиях бранши (42, 44) односторонне смещены в открытое положение с помощью пружины или упругого устройства другого типа. В то время как бранши (42, 44) закрываются или открываются по мере поступательного перемещения режуще-сшивающего элемента (60), следует понимать так, что другие версии могут обеспечить независимое движение браншей (42, 44) и режуще-сшивающего элемента (60). В качестве примера только один или несколько кабелей, стержней, штырей и других устройств может проходить через ствол (30) для выборочного включения браншей (42, 44) независимо от режуще-сшивающего элемента (60). Такая активация устройства браншей (42, 44) может отдельно управляться специально предназначенной рукояткой (20). Кроме того, таким устройством активации бранши можно управлять с помощью триггера (24) в дополнение к имеющейся функции триггера (24) для управления режуще-сшивающим элементом (60). Следует также понимать, что режуще-сшивающий элемент (60) может быть односторонне смещен в начальное положение так, что режуще-сшивающий элемент (60) втягивается проксимально, когда пользователь ослабляет ручку управления (24).
D. Типовая операция
В типовом использовании концевой зажим (40) вставляется в тело пациента через троакар. Шарнирная часть (36), по существу, прямая, когда концевой зажим (40) и часть ствола (30) вставляются через троакар. Шарнирное управление (28) может быть отрегулировано для поворота или сгиба шарнирных частей (36) ствола (30) в зависимости от расположения концевого зажима (40) в необходимое положение и взаимно ориентировано по отношению к анатомической структуре пациента. Два слоя ткани анатомической структуры затем захват браншами (42, 44), прижимая триггер (24) к пистолетной рукоятке (22). Такие слои ткани могут быть частью одной и той же природной полости, определенной анатомическим строением (например, кровеносный сосуд, часть желудочно-кишечного тракта, часть репродуктивной системы и др.) пациента. Например, один слой ткани может содержать верхнюю часть кровеносного сосуда, а другой слой ткани может включать в себя нижнюю часть кровеносного сосуда, на том же участке длины кровеносного сосуда (например, такой, что система циркуляции кровеносного сосуда перед использованием электрохирургического инструмента (10), перпендикулярна продольной оси крепления концевого зажима (40) и т.д.). Другими словами, длины браншей (42, 44) могут быть ориентированы перпендикулярно (или по меньшей мере, как правило, поперечно) к длине кровеносных сосудов. Как отмечалось выше, фланцы (62, 66) управляют действием поворота бранши (44) к бранше (42), где режуще-сшивающий элемент (60) приводится в действие отдельно, прижиманием триггера (24) к пистолетной рукоятке (22).
Со слоями ткани, захваченными браншами (42, 44), режуще-сшивающий элемент (60) продолжает продвигаться дистально, пользователь прижимает триггер (24) к пистолетной рукоятке (22). По мере того как режуще-сшивающий элемент (60) продвигается дистально, дистальное лезвие (64) одновременно разрезает зажатые слои ткани, в результате чего отделяется верхняя часть слоя, соединенного с соответствующей отделенной нижней частью слоя. В некоторых версиях это приводит к разрезанию кровеносных сосудов в направлении, которое, как правило, поперечно длине кровеносных сосудов. Следует иметь в виду, что наличие фланцев (62, 66) непосредственно сверху или снизу браншей (42, 44), соответственно, может помочь удержать бранши (42, 44) в закрытом положении и плотно сжатыми моментально. В частности, фланцы (62, 66) могут помочь сохранить значительную силу сжатия между браншами (42, 44). С разрезанной частью слоя ткани, сжатой браншами (42, 44), поверхностные электроды (50, 52) приводятся в действие биполярной ВЧ энергией, пользователь нажимает кнопку активации (26). По некоторым данным электроды (50, 52), выборочно соединенные с источником питания (80) (например, пользователь нажимает кнопку (26) и т.д.), как и поверхностные электроды (50, 52) браншей (42, 44), активируются общей первой полярностью, при этом режуще-сшивающий элемент (60) активируется второй полярностью, противоположной первой полярности. Таким образом, биполярный ВЧ поток тока между режуще-сшивающим элементом (60) и поверхностными электродами (50, 52) браншей (42, 44) протекает по сжатым участкам отрезанных частей слоев ткани. В некоторых других версиях поверхностный электрод (50) имеет одну полярность, в то время как поверхностный электрод (52) и режуще-сшивающий элемент (60) вместе имеют другую полярность. В иной версии (в том числе, по меньшей мере, нескольких других) биполярная радиочастотная энергия, поставляемая по источнику питания (80), в конечном счете, термически спаивает вместе части слоев ткани с одной стороны режуще-сшивающего элемента (60) с частями слоев ткани с другой стороны режуще-сшивающего элемента (60) вместе.
При определенных обстоятельствах теплом, генерируемым включенным поверхностным электродом (50, 52), можно разрушить коллаген в части слоя ткани и с помощью давления зажима, обеспеченного браншами (42, 44); разрушенный коллаген может образовать уплотнение в части слоя ткани. Таким образом, отрезанные концы природной полости, определяющейся анатомической структурой, закрыты гемостатическим уплотнением, так что из разрезанных концов не будут течь телесные жидкости. В некоторых версиях поверхностные электроды (50, 52) могут быть активированы биполярной ВЧ энергией для режуще-сшивающего элемента (60), даже сначала проводимой отдельно и, таким образом, даже прежде чем ткань разрезана. Например, такие сроки могут быть представлены в версиях, где кнопка (26) служит механической блокировкой по отношению к триггеру (24) в дополнение к действующей в качестве переключателя между источником питания (80) и поверхностными электродами (50, 52).
Некоторые из нижеописанных идей вариантов электрохирургического инструмента (10) следует понимать так, что различные идеи, представленные ниже, могут быть также включены в различные другие типы устройств. В качестве примера в дополнение к тому, что уже включено в электрохирургический инструмент (10), различные идеи, приведенные ниже, могут быть легко включены в устройства, указанные в любой ссылке, включенной в этот документ, другие виды электрохирургических устройств, хирургические скобы, хирургические клипсонакладыватели и тканевые зажимы могут быть включены среди различных вариантов других устройств.
II. Типовые конфигурации шарнирных соединений
Шарнирная часть (36) ствола (30) может иметь различные варианты формы. В качестве примера шарнирная часть (36) может быть конфигурирована в соответствии с одной или более идеями из дополнения к патенту США № [Адвокатский реестр № END6889USNP], озаглавленному «Элементы шарнирного соединения для шарнирного хирургического устройства», внесенному в реестр с информацией, раскрытие которой включено посредством ссылки в данный документ. Как другой, чисто иллюстративный пример, шарнирная часть (36) может быть конфигурирована с одной или более идеями из дополнения к патенту США № [Адвокатский реестр № END6889USNP1], озаглавленному «Элементы шарнирного соединения для шарнирного хирургического устройства», внесенному в реестр с информацией, раскрытие которой включено посредством ссылки в данный документ. Кроме того, шарнирная часть может быть конфигурирована по меньшей мере в соответствии с одной из приводимых здесь идей. Другие различные подходящие формы шарнирной части (36) будут понятны специалистам в данной области в соответствии с идеями, представленными здесь.
III. Типовая конфигурация шарнирного управления
Как отмечалось выше, некоторые версии ручки (20) включают шарнирное управление (28), которое предназначено для управления шарнирной частью (36) ствола (30), чтобы таким образом произвольно располагать концевой зажим (40) под различными углами относительно продольной оси, определяемой оболочкой (32). Несколько примеров форм шарнирного управления (28) и другие компоненты ручки (20) будут описаны более подробно ниже, в то время как другие примеры будут понятны специалистам в данной области согласно с приведенными здесь идеями. В качестве примера несколько альтернативных, сугубо иллюстрационных примеров шарнирного управления (28) раскрыты в дополнение к патенту США № [Адвокатский реестр № END6888USNP1], озаглавленному «Элементы управления для шарнирного хирургического устройства», внесенному в реестр с информацией, раскрытие которой включено посредством ссылки в данный документ.
A. Типовое шарнирное управление с перпендикулярно вращающейся ручкой
Фиг.5 изображает типовой электрохирургический инструмент (100), включающий ручку (120), ствол (130), расположенный отдельно от рукоятки (120), и концевой зажим (140), расположенный на конце ствола (130). Рукоятка (120) в данном примере включает пистолетный тип (122), вращающийся триггер (124), пусковую кнопку (126) и вращаемую шарнирную ручку (128). Триггер (124) поворачивается к и от пистолетной рукоятки (122), чтобы выборочно двигать концевой зажим (140), как уже было описано в одной или более ссылках, прилагаемых к данному документу. Активирующая кнопка (126) выполнена с возможностью выборочно активировать радиочастотные цепи, которые связаны с концевым зажимом (140), так же, как и описано выше и как описано в одной или нескольких ссылках, приведенных здесь. Примеры задействования такой блокировки приведены в одной или более ссылках, приложенных к данному документу. Примеры того, как такая блокировка может быть реализована, представлены в одной или нескольких ссылках в настоящем документе. Следует иметь в виду, что пистолетная рукоятка (122), триггер (124) и кнопка (126) могут быть изменены, замещены, дополнены и т.д. любым подходящим способом, и что описание таких компонентов в настоящем документе является лишь иллюстративным. Шарнирная ручка (128) в данном примере выполнена с возможностью выборочного управления шарнирной частью (136) ствола (130), как будет описано более подробно ниже.
Ствол (130) настоящего примера включает внешнюю оболочку (132), шарнирную часть (136) на дистальном конце оболочки (132) и режущие детали направляющей трубки, подвижно и коаксиально расположенной внутри оболочки (132). Режущие части направляющей трубки (138) крепятся к управляющему блоку (139), который в дальнейшем закреплен на режущий элемент (146) концевого зажима (140). Режущий элемент направляющей трубки (138) продольно подвижен к управляющему блоку (139) в продольном направлении, тем самым продольно перемещая режущий элемент (146). Режущий элемент (146) по существу эквивалентен режуще-сшивающему элементу (60) описанному выше. Проксимальная часть (148) концевого зажима (140) включает в себя вставку (не показано), которая представляет канал, содержащий часть режущего элемента (146), который проходит через проксимальную часть (148). Этот канал выполнен с возможностью режущего элемента (146) легко перемещаться относительно вставки, а также предохранять режущий элемент (146) от изгиба внутри вставки, когда режущий элемент (146) сталкивается с нагрузкой во время внешнего продвижения режущего элемента (146).
В данном примере направляющая трубка (138) отводится далеко прижатием триггера (124) к пистолетной рукоятке (122), в то время как направляющая трубка (138) проксимально втягивается отпусканием триггера (124) и/или активным движением триггера (124) от пистолетной рукоятки (122). Как показано на фиг.13, соединение (125) соединяет сдвоенный триггер (124) с направляющей трубкой (138). Конечно, режущий элемент (146) может быть перемещен в любой другой подходящей форме. Шарнирная часть (136) настоящего примера выполнена с возможностью выбора положения концевого зажима (140) под различными углами относительно продольной оси, заданной оболочкой (132). Различные примеры форм шарнирной части (136) и других компонентов ствола (130) могут быть описаны в различных приводимых здесь ссылках, в то время как другие примеры будут очевидны специалистам в данной области соответственно с приведенными здесь идеями. Точно также концевой зажим (140) может быть конфигурирован в соответствии с концевым зажимом (40), описанным выше, в соответствии с идеями из различных ссылок в настоящем документе, и/или в любой другой подходящей конфигурации, как будет очевидно специалисту в данной области согласно идеям данного документа.
В некоторых версиях ствол (130) также поворачивается вокруг продольной оси определенной оболочкой (132) относительно рукоятки (120), с помощью ручки (134). Такое вращение может обеспечить вращение концевого зажима (140) и ствола (130) как единого целого. В некоторых других версиях ручка (134) выполнена с возможностью вращать концевой зажим (140), не поворачивая другую часть ствола (130), ближайшую к шарнирной части (136). В качестве еще одного исключительно иллюстративного примера электрохирургический инструмент (100) может включать в себя единое управление вращением, которое обеспечивает вращаемость ствола (130) и концевого зажима (140) как единого целого. Другие подходящие схемы вращения будут видны тем специалистам в данной области, чьи идеи представлены в данном документе. Конечно, вращающиеся компоненты при желании просто могут быть исключены. Конечно, вращающиеся элементы могут быть просто исключены по необходимости. В любом варианте устройства, которое обеспечивает вращение ствола (130) и/или концевого зажима (140), вращение ручки (134) и/или ствола (130) и/или концевого зажима (140) может включать в себя один или несколько маркеров, облегчающих визуальную идентификацию углового положения. Например, пользователь может соотносить маркеры ручки вращения (134) с соответствующим маркером на стволе (130) и/или концевом зажиме (140), чтобы лучше понять положение этих компонентов относительно пациента и инструмента (100).
Фиг.6-12 показывают различные компоненты ствола (130), которые обеспечивают шарнирное управление шарнирной частью (136). В частности, эти компоненты включают в себя сепаратор (150), первую шарнирную связку (160) с соответствующим ведущим элементом (162) и вторую шарнирную связку (170) с соответствующим ведущим элементом (172). Как лучше всего видно на фиг.6, сепаратор (150) включает в себя верхнюю полость (151), среднюю полость (152) и нижнюю полость (153). Сепаратор (150) также включает в себя боковые выемки (154), внешнюю выступающую часть (156) и разрыв (158). Сепаратор (150) расположен внутри режущего элемента направляющей трубки (138) и поддерживает фиксированное продольное положение во время работы инструмента (100). Таким образом, сепаратор (150) и дистальная оболочка (132) остаются неподвижными относительно друг друга и относительно ручки (120); при этом режущий элемент направляющей трубки (138) совершает возвратно-поступательное движение относительно сепаратора (150), внешней оболочки (132) и ручки (120). Дистальная выступающая часть (156) конфигурирована так, чтобы разрешить преобразование контроллера (139) по существу свободным от вмешательства со стороны внешней выступающей части (156) или любой другой части сепаратора (150).
В данном примере сепаратор (150) выполнен в виде двух частей, расположенных встык, внешнюю выступающую часть от ближайших частей помогает отделить зазор (158). Конечно, сепаратор (150) альтернативно может быть сформирован как единое целое из любого другого подходящего количества частей. В качестве примера зазор (158) может быть выполнен как вырез из одного куска материала.
Как будет описано более подробно ниже, проводка (900) проходит через сепаратор (150) для обеспечения электрической связи с концевым зажимом (140). В частности, проводка (900) проходит через среднюю полость (152) от проксимального конца сепаратора (150) до того, как проводка (900) достигает зазора (158). В зазоре (158) проводка (900) переходит к нижней полости (153) и проходит через нижнюю полость (153), пока не достигнет дальнего конца сепаратора. Затем проводка (900) проходит через шарнирную часть (136) к концевому зажиму (140). Таким образом, проводка (900) выполнена с возможностью передачи энергии от источника питания к концевому зажиму (140) в соответствии с идеями, приведенными здесь, и в соответствии с идеями из различных ссылок в данном документе. Дистальная выступающая часть (156) защищает проводку (900) от контроллера (139), таким образом, контроллер (139) не может контактировать с проводкой (900), несмотря на продольное положение контроллера (139) вдоль дистальной части (156).
Первая шарнирная связка (160) подвижно расположена с одной стороны выемки (154) сепаратора (150), в то время как вторая шарнирная связка (170) расположена с возможностью скольжения с другой стороны выемки (154) сепаратора (150). Возвращаясь к фиг.6: боковые выемки (154) включают продольные пазы (155), которые конфигурированы для уменьшения контакта площади поверхности с шарнирными связками (160, 170), тем самым уменьшая трение между сепаратором (150) и шарнирными связками (160, 170). Сепаратор (150) также может быть выполнен из материала с низким трением и/или включать обработку поверхности для уменьшения трения. Шарнирные связки (160, 170) равномерно расположены вдоль всей длины ствола (130), в том числе посредством шарнирных частей (136). Как показано на фиг.7, дальний конец (166) первой шарнирной связки (160) крепится к одной стороне проксимальной части (148) концевого зажима (140) в точке крепления. Дальний конец (176) второй шарнирной связки (170) крепится к другой стороне проксимальной части (148) концевого зажима (140) в точке крепления. Как будет описано более подробно ниже, шарнирное сочленение вращательной ручки (128) выполнено с возможностью выборочного перехода с одного шарнирного сочленения связки (160, 170) дистально, в то время как другое шарнирное сочленение связки (160, 170) одновременно втягивается проксимально и наоборот. Следует понимать, что эти противоположные перемещения приведут шарнирную часть (136) в изгиб, таким же образом и шарнирный концевой зажим (140). В частности, концевой зажим (140) будет отклоняться в сторону любой связки шарнирного сочленения (160, 170), втягиваясь проксимально, и от любой связки шарнирного сочленения (160, 170), выдвинутой дистально.
Как лучше всего видно на фиг.9, управляющий элемент (162) как единое целое крепится к шарнирной связке (160) и включает в себя выемку (164), расширяющуюся вовнутрь. Как лучше всего видно на фиг.10, управляющий элемент (172) как единое целое крепится к шарнирной связке (170) и включает в себя выемку (174), расширяющуюся вовнутрь. Как лучше всего видно на фиг.11, управляющие элементы (162, 164) расположены и настроены так, что пазы (164, 174) отдельно расположены вдоль всей длины сепаратора (150). Как лучше всего видно на фиг.12, проксимальная часть режущего элемента направляющей трубки (138) включает в себя продольные слоты (137). Управляющие элементы (162, 172) подвижно расположены в слотах (137) и пазах (164, 174) и радиально расположены за пределами внешней окружности режущих элементов направляющей трубки (138). Слоты (137) настроены для обеспечения свободного доступа режущего элемента направляющей трубки (138) относительно управляющих элементов (162, 172), чтобы тем самым обеспечить свободное воздействие режущего элемента (164) независимо от положения шарнирного сочленения шарнирной части (136). Иными словами, слоты (137) настроены для обеспечения свободного доступа управляющих элементов (162, 172) по отношению к режущему элементу направляющей трубки (138), чтобы тем самым обеспечить свободное шарнирное сочленение шарнирной части (136) независимо от продольного положения режущего элемента (164).
Как показано на фиг.13-14, подвижное шарнирное сочленение ручки (128) соосно расположено около проксимальной части направляющей трубки (138) и включает в себя управляющие элементы (162, 172). Шарнирное сочленение ручки (128) ориентировано перпендикулярно продольной оси, определяемой стволом (130), и может поворачиваться вокруг продольной оси, определяемой стволом (130). Как будет описано более подробно ниже, такой поворот шарнирного сочленения ручки (128) вызовет противоположные перемещения управляющих элементов (162, 172) с направлениями противоположных перемещений, зависимых от направления, в котором вращается шарнирное сочленение ручки (128), так, что вращение шарнирного сочленения ручки (128) будет поворачивать концевой зажим (140). Как показано на фиг.14, шарнирное соединение ручки (128) включает в себя первую внутреннюю резьбу (180) и вторую внутреннюю резьбу (182). Резьбы (181, 182) имеют противоположные шаговые углы или направленность в этом примере.
Как лучше всего видно на фиг.14-15, первый направляющий винт (183) и второй направляющий винт (184) подвижно расположены вдоль пары контактов (123), которые крепятся к корпусу (121). Таким образом, направляющие винты (183, 184) обеспечивают доступ в корпус (121), но не имеют возможности вращаться внутри корпуса (121). Первый направляющий винт (183) включает в себя внешнюю резьбу (185), которая контактирует с резьбой (181) шарнирного сочленения ручки (128), в то время как второй направляющий винт (184) включает в себя внешнюю резьбу (186), которая контактирует с резьбой (182) шарнирной ручки (128). Угол наклона резьбы (185) дополняет угол наклона резьбы (181), в то же время угол наклона резьбы (186) дополняет угол наклона резьбы (182). Поэтому следует понимать, что, несмотря на противоположность углов наклона, вращением ручки (128) в первом направлении будет дистально управлять направляющий винт (183) с одновременным управлением направляющего винта (184) проксимально, и вращением ручки во втором направлении будет проксимально управлять направляющий винт (183) с одновременным управлением направляющего винта (184) дистально.
Углы резьбы (181, 182, 185, 186) также конфигурированы так, что шарнирная часть (136) будет эффективно заблокирована в любом положении шарнирного сочленения, несмотря на поперечные нагрузки на концевой зажим (140), как правило, не гнущейся части шарнирного сочленения (136), за счет трения между резьбами (181, 182, 185, 186). Иными словами, части шарнирного сочленения (136) могут изменить свою конфигурацию, только когда ручка (128) вращается. В то время как углы резьбы могут существенно предотвратить изгиб шарнирной части (136) в ответ на поперечные нагрузки на концевой зажим (140), углы могут по-прежнему обеспечить вращение шарнирного сочленения ручки (128), чтобы переместить направляющие винты (183, 184). В качестве примера углы резьб (181, 182, 185, 186) могут быть приблизительно ±2 градуса или ±3 градуса. Другие подходящие углы будут очевидны специалистам в данной области на основе идей, представленных здесь. Следует также понимать, что резьба (181, 182, 185, 186) может иметь квадратное или прямоугольное сечение или любую другую подходящую конфигурацию.
Как лучше всего видно на фиг.15-16, первый натяжной механизм (191) имеет резьбовое зацепление с первым направляющим винтом (183), в это время второй натяжной механизм (192) имеет резьбовое зацепление со вторым направляющим винтом (184). Таким образом, продольное положение первого натяжного механизма (191) относительно первого направляющего винта (183) можно регулировать, вращая первый механизм натяжения (191) относительно первого направляющего винта (183), в то время как продольное положение второго натяжного механизма (192) относительно второго направляющего винта (184) можно регулировать, вращая второй механизм натяжения (192) относительно второго направляющего винта (184). В противном случае, первый механизм натяжения (191) будет двигаться как единое целое с первым направляющим винтом (183), в то же время второй механизм натяжения (192) будет двигаться как единое целое со вторым направляющим винтом (184).
Первый механизм натяжения (191) также зацепляется с шайбой (193), которая далее зацепляется с выемкой (174) направляющего элемента (172). Взаимодействие между шайбой (193) и направляющим элементом (172) таково, что шайба (193) и направляющий элемент (172) будут двигаться вместе. В некоторых версиях шайба (193) крепится к механизму натяжения (191) таким образом, что механизм натяжения (191) и тянет шайбу (193) дистально, и толкает шайбу (193) проксимально. Таким образом, в некоторых таких примерах первый направляющий винт (183) способен как толкать шарнирные связки (170) дистально, так и тянуть шарнирные связки (170) проксимально, в зависимости от направления вращения ручки (128). Однако в данном примере механизм натяжения (191) соединен впритык с шайбой (193) таким образом, что механизм натяжения (191) работает, чтобы толкать шайбу (193) проксимально, но не может тянуть шайбу (193) дистально. Таким образом, в данном примере первый направляющий винт (183) работает, чтобы тянуть шарнирные связки (170) проксимально, но не может толкать шарнирные связки (170) дистально. Вместо этого первый направляющий винт (183) может просто тянуть механизм натяжения (191) дистально, чтобы позволить шарнирной связке (170), направляющему элементу (172) и шайбе (193) совершать возвратно-поступательные движения в ответ на проксимальный отвод шарнирной связки (160), взаимодействуя через шарнирную часть (136). Другие подходящие соотношения будут очевидны специалистам в данной области соответственно представленным здесь идеям. Следует также понимать, что направляющий элемент (172) и/или шайба (193) может вращаться относительно механизма натяжения (191), который может обеспечить вращения ствола (130) от ручки (134). Как описано более подробно ниже, механизм натяжения (191) может быть использован, чтобы устранить любой допуск на зазор между направляющим элементом (172) и направляющим винтом (183).
Кроме того, второй механизм натяжения (192) зацепляется с шайбой (194), которая далее взаимодействует с выемкой (164) направляющего элемента (162). Взаимодействие между шайбой (194) и направляющим элементом (162) таково, что шайба (194) и направляющий элемент (162) будут перемещаться вместе. В некоторых вариантах шайба (194) крепится к механизму натяжения (192) таким образом, что механизм натяжения (192) и тянет шайбу (194) дистально, и толкает шайбу (194) проксимально. Таким образом, в некоторых таких примерах, второй направляющий винт (184) способен как толкать шарнирную связку (160) дистально, так и тянуть шарнирную связку (160) проксимально, в зависимости от направления вращения ручки (128). Однако в данном примере механизм натяжения (192) соединен с шайбой (194) впритык так, что механизм натяжения (192) работает так, чтобы толкать шайбу (194) проксимально, но не может тянуть шайбу (194) дистально. Таким образом, в данном примере второй направляющий винт (184) работает, чтобы тянуть шарнирно-сочлененные связки (160) проксимально, но не может толкать шарнирные связки (160) дистально. Другие подходящие соотношения будут очевидны специалистам в данной области соответственно представленным здесь идеям. Другие подходящие соотношения будут очевидны специалистам в данной области, учитывая приведенные здесь идеи. Следует также понимать, что направляющий элемент (162) и/или шайба (194) могут вращаться относительно механизма натяжения (192), который может обеспечить вращения ствола (130) от ручки (134). Как описано более подробно ниже, механизм натяжения (192) может быть использован, чтобы устранить любой допуск на зазор между направляющим элементом (162) и направляющим винтом (184).
Фиг.17A-17C показывают несколько из описанных выше компонентов, взаимодействующих с согнутой шарнирной частью (136), чтобы поворачивать концевой зажим (140). На фиг.17А шарнирное сочленение (136) имеет, по существу, прямую конфигурацию. Потом ручка (128) вращается, что заставляет направляющий винт (183) перемещаться проксимально, а направляющий винт (184) дистально. Это проксимальное перемещение направляющего винта (183) тянет шарнирную связку (170) проксимально, что заставляет шарнирную часть (136) начать гнуться, как показано на фиг.17B. Этот изгиб шарнирной части (136) тянет шарнирную связку (160) дистально. Дистальное движение направляющего винта (184) в ответ на вращение ручки (128) управляет шарнирной связкой (160) и направляющим элементом (162) двигаться дистально. В некоторых других вариантах дистальное движение направляющего винта (184) управляет направляющим элементом (162) и шарнирной связкой (160) дистально. Если пользователь продолжает вращение ручки (128), описанные выше взаимодействия продолжаются таким же образом, что приводит к дальнейшему изгибу шарнирной части (136), как показано на фиг.17C. Следует понимать, что ручка, вращающаяся (128) в противоположном направлении приведет, шарнирную часть (136) в прямое положение, а дальнейшее вращение в противоположном направлении согнет шарнирную часть (136) в обратном направлении.
В некоторых вариантах ручка (128) включает в себя визуальный индикатор, который связан с шарнирной частью (136), находящейся в основном в прямой конфигурации. Такой визуальный индикатор может согласовываться с соответствующим визуальным индикатором на корпусе (121) рукоятки (120). Таким образом, когда пользователь повернул ручку (128), чтобы шарнирная часть (136) приблизилась к практически прямой конфигурации, пользователь может наблюдать за показателями для подтверждения того, что шарнирно-сочлененная часть (136), по сути, приблизилась к прямой конфигурации. В качестве примера это может быть сделано прямо перед инструментом (100), изъятым из троакара, чтобы уменьшить вероятность зацепления шарнирной части (136) дистального края троакара. Конечно, такие индикаторы являются лишь дополнительными.
В некоторых случаях, производственное несоответствие может привести к шарнирным связкам (160, 170) с различной длиной. В дополнение или в качестве альтернативы могут быть присущи производственные несоответствия начального позиционирования направляющего винта (183, 184) по отношению к шарнирному сочленению ручки (128), несоответствия в начальном позиционировании механизма натяжения (191, 192) относительно направляющих винтов (183, 184) и/или другие несоответствия, которые могут привести к нежелательному позиционированию/соотношению шарнирных связок (160, 170). Такие несоответствия могут привести к потере движения или сбою в работе шарнирных устройств инструмента (100). Для решения таких проблем механизм натяжения (191, 192) может быть повернут относительно направляющего винта (183, 184) для регулировки продольного положения направляющих элементов (162, 172) относительно направляющих винтов (183, 184). Например, если имеется недостаточное напряжение в шарнирной связке (170), механизм натяжения (191) может быть повернут к направляющей шайбе (193) и направляющему элементу (172) проксимально до тех пор, пока шарнирная связка (170) достигает достаточной степени напряженности. Точно так же, если есть недостача напряжения в шарнирной связке (160), механизм натяжения (192) может быть повернут к направляющей шайбе (195) и направляющему элементу (162) проксимально до тех пор, пока шарнирная связка (160) достигнет достаточной степени напряженности. Направляющие винты (183, 184) могут оставаться относительно неподвижными во время таких корректировок. Шарнирная часть (136) может оставаться относительно прямой во время таких изменений и даже может оставаться относительно прямой во время таких корректировок.
В некоторых вариантах механизмы натяжения (191, 192) вращаются вручную. В некоторых других версиях механизмы натяжения (191, 192) поворачиваются автоматически с помощью стойки или другого оборудования. В некоторых таких автоматизированных системах калибровки логическое управление может контролировать нагрузку на двигатель, который используется для управления калибровкой стойки или механизма, который входит в механизм натяжения (191, 192), и может автоматически остановить движение такой стойки или механизма, когда нагрузка достигает порога, связанного со свойственным связке (160, 170) натяжением. Например, в тех случаях, когда производственные несоответствия или допустимость начального зазора между механизмом натяжения (191, 192) и шайбой (193, 194) или между шайбами (193, 194) и направляющими элементами (162, 172), механизмами натяжения (191, 192) может быть изменена до тех пор, пока такие зазоры не будут закрыты и не будет достаточного контакта со сделанными заранее с зазорами деталей. В качестве еще одного сугубо иллюстративного варианта механизмы натяжения (191, 192) могут быть автоматически остановлены, когда проксимальные концы связок (160, 170) и/или направляющих элементов (162, 172) достигают определенной точки. Различные подходящие способы, в которых механизмы натяжения (191, 192) могут быть скорректированы, будут очевидны специалистам в данной области согласно с представленными здесь идеями. Следует также понимать, что механизмы натяжения (191, 192) могут быть спаены, склеены, сварены или иным образом соединены с соответствующими направляющими винтами (183, 184), если промежутки между направляющими элементами (162, 172) и их шайбами (193, 194) будут нулевые. Такая связь может предотвратить последующее движение механизма натяжения (191, 192) относительно соответствующих направляющих винтов (183, 184).
В качестве еще одного исключительно иллюстративного примера приведем производственное несоответствие, которое может быть решено на дистальных концах связок (160, 170). Например, дистальные концы связок (160, 170) крепятся к проксимальной части (148) концевого зажима (140), шарнирная часть (136) может удерживаться в прямой конфигурации, а связки (160, 170) могут быть вытянуты дистально, чтобы устранить провисание в связках (160, 170). С обеими связками (160, 170), находящимися в напряжении, связки (160, 170) могут быть приварены или иначе прикреплены к проксимальной части (148) концевого зажима (140). Следует иметь в виду, что эта форма калибровки не ограничивается инструментом (100), так что эта форма калибровки может быть легко применена к различным другим инструментам, описанным здесь, среди прочего. Другие подходящие структуры и методы для калибровки будут очевидны специалистам в данной области на основе представленных здесь идей.
B. Типовое шарнирное управление угловой поворотной ручкой
Фиг.18 изображает типовой электрохирургический инструмент (200), который включает рукоятку (220), ствол (230), вытянутый дистально к рукоятке (220), и концевой зажим (240), расположенный на дистальном конце ствола (230). Рукоятка (220) данного примера включает в себя пистолетную рукоятку (222), поворотный триггер (224), кнопку активации (226) и шарнирную поворотную ручку (228). Триггер (224) может поворачиваться в сторону пистолетной рукоятки и от нее (222) для выборочного включения концевого зажима (240), как описано выше и как описано в одной или нескольких приведенных здесь ссылках. Кнопка активации (226) выполнена с возможностью выборочно активировать радиочастотные цепи, которые сообщаются с концевым зажимом (240), так же как и описано выше и как описано в одной или нескольких приведенных здесь ссылках. Примеры задействования такой блокировки приведены в одной или более ссылках, приложенных к данному документу. Примеры такой блокировки представлены в одной или нескольких приводимых здесь ссылках. Следует понимать, что пистолетная рукоятка (222), триггер (224) и кнопка (226) могут быть изменены, заменены, дополнены и т.д. любым подходящим способом, и что описание таких компонентов в настоящем документе является сугубо иллюстративным. Шарнирная ручка (228) в настоящем примере выполнена с возможностью выборочного управления шарнирной частью (236) ствола (230), как будет более подробно описано ниже.
Ствол (230) настоящего примера включает внешнюю оболочку (232), шарнирную часть (236) на дистальном конце оболочки (232) и режущий элемент направляющей трубки (238), что подвижно и коаксиально расположены внутри оболочки (232). Режущий элемент направляющей трубки (238) крепится к режуще-сшивающему элементу (не показан), который является по существу эквивалентным режуще-сшивающему элементу (60), описанному выше. Режущий элемент направляющей трубки (238) продольно подвижен к продольному движению элемента. В данном примере направляющая трубка (238) продвигается дистально, прижатием триггера (224) к пистолетной рукоятке (222), в то время как направляющая трубка (238) отводится проксимально, отпуская триггер (224) и/или активно двигая триггер (224) от пистолетной рукоятки (222). Как показано на фиг.19, скоба (225) соединяет триггер (224) с направляющей трубкой (238). Конечно, режуще-сшивающему элементу может быть придана и любая другая подходящая форма. Шарнирная часть (236) настоящего примера выполнена с возможностью выбора положения концевого зажима (240) под различными углами относительно продольной оси, определяемой оболочкой (232). Различные примеры форм шарнирной части (236) и других компонентов ствола (230) описаны в различных ссылках, приведенных здесь, в то время как другие примеры будут очевидны специалистам в данной области в соответствии с изложенными здесь идеями. Точно так же концевой зажим (240) может быть конфигурирован в соответствии с концевым зажимом (40), описанным выше, в соответствии с идеями, изложенными в различных ссылках данного документа, и/или любым другим подходящим способом, как будет очевидно специалисту в данной области согласно изложенным здесь идеям.
В некоторых вариантах ствол (230) также поворачивается вокруг продольной оси, определяемой оболочкой (232), относительно рукоятки (220), с помощью ручки (234). Такое вращение может обеспечить вращение концевого зажима (240) и ствола (230) как единого целого. В некоторых других версиях ручка (234) выполнена с возможностью вращать концевой зажим (240), не вращая другую часть ствола (230), проксимально к шарнирной части (236). В качестве еще одного исключительно иллюстративного примера электрохирургический инструмент (200) может включать в себя управление вращением, которое обеспечивает вращаемость ствола (230) и концевого зажима (240) как единого целого; другие подходящие схемы вращения будут видны тем специалистам в данной области, чьи идеи представлены в данном документе. Конечно, вращающиеся компоненты при желании просто могут быть исключены. Конечно, вращающие устройства могут быть просто опущены, если необходимо. В любой версии устройства, которое обеспечивает вращение ствола (230) и/или концевого зажима (240), вращение ручки (234) и/или ствола (230) и/или концевого зажима (240) может включать в себя один или несколько маркеров, облегчающих визуальную идентификацию углового положения. Например, пользователь может соотносить маркеры на поворотной ручке (234) с соответствующими маркерами на стволе (230) и/или в концевом зажиме (240), чтобы лучше понять направленность этих элементов по отношению к пациенту и инструменту (200).
Следует иметь в виду, что элементы ствола (230), которые обеспечивают управление шарнирной частью (236), могут быть такими же, как описано выше со ссылкой на фиг.6-12 в контексте инструмента (100). Другими словами, устройства на фиг.19-20 могут быть легко объединены с устройствами на фиг.6-12. В данном примере шарнирная связка (276) является функциональным эквивалентом шарнирной связки (160), описанной выше; шарнирная связка (270) является функциональным эквивалентом шарнирной связки (170), описанной выше. В частности, шарнирные связки (270, 276) можно перевести в противоположные положения, чтобы выборочно согнуть шарнирную связку (236) в любом направлении.
Фиг.19-20 показывают различные компоненты рукоятки (220), которые обеспечивают контроль за шарнирной частью (236). В частности, эти компоненты включают в себя проксимальную направляющую гайку (260), дистальную направляющую гайку (261), проксимальный направляющий винт (284), дистальный направляющий винт (283), направляющее карданное кольцо (250) и регулятор (228). Направляющие винты (283, 284) расположены вдоль контактов (223), которые закреплены на корпусе (221) рукоятки (220) так, что направляющие винты (283, 284) перемещаются внутри рукоятки (220), но не вращаются внутри рукоятки (220). Шарнирная связка (270) закреплена на дистальном направляющем винте (283), в то время как шарнирная связка (276) крепится к проксимальному направляющему винту (284). Эти соотношения могут быть аналогичны описанным выше по отношению к инструменту (100). Поэтому следует понимать, что шарнирно сочлененная связка (270) может двигаться одновременно с дистальным направляющим винтом (283) в любом направлении, в то время как шарнирная связка (276) может двигаться одновременно с проксимальным направляющим винтом (284) в любом направлении.
Дистальный направляющий винт (283) зацеплен резьбой с дистальной направляющей гайкой (261). В частности, дистальный направляющий винт (283) включает в себя внешнюю резьбу (285), которая зацепляется с внутренней резьбой (281) дистальной направляющей гайки (261). Точно также проксимальный направляющий винт (284) зацеплен резьбой с проксимальной направляющей гайкой (260). В частности, проксимальный направляющий винт (284) включает в себя внешнюю резьбу (286), которая зацепляется с внутренней резьбой (282) проксимальной направляющей гайки (260). Резьбы (281, 285) ориентированы/нарезаны в одном направлении, в то время как резьбы (282, 286) ориентированы/нарезаны в противоположном направлении. Таким образом, резьбы (281, 282, 285, 286) аналогичны резьбам (181, 182, 185, 186), описанным выше. Направляющие гайки (260, 261) скреплены вместе в данном примере, так что направляющие гайки (260, 261) вращаются вместе. Таким образом, когда направляющие гайки (260, 261) вращаются, шарнирно-сочлененная связка (270) движется в одном направлении, в то время как шарнирная связка (276) движется в другом направлении, в зависимости от направления вращения направляющих гаек (260, 261).
Направляющая гайка (261) содержит верхний паз (263) и противоположный нижний паз (не показано). Одновременно направляющая гайка (260) содержит верхний паз (262) и противоположный нижний паз (не показано). Эти пазы (262, 263) выровнены и взаимодействуют так, чтобы вставить стволы (264), тогда направляющие гайки (260, 261) соединены вместе. Эти стволы (264) используются для вращения направляющих гаек (260, 261). В частности, стволы (264) расположены в соответствующих гнездах (266) карданного кольца (250). Таким образом, направляющие гайки (260, 261) будут вращаться в ответ на вращение карданного кольца (250). Карданное кольцо (250) также включает в себя еще одну пару противоположных пазов (252), для которой также имеется набор стволов (254). Стволы (254) используются для вращения карданного кольца (250). В частности, стволы (254) расположены в соответствующих отверстиях (256) ручки (228). Таким образом, карданное кольцо (250) и направляющие гайки (260, 261) будут вращаться в ответ на вращение ручки (228). В отличие от ручки (128), описанной выше, ручка (228) из этого примера ориентирована с углом наклона относительно продольной оси, определяемой стволом (230). Тем не менее, ручка (228) по-прежнему вращается вокруг продольной оси, определяемой стволом (230). Такие конфигурация и функциональность позволяют поворотное соединение стволами (254, 264) в карданном кольце (250). Иными словами, карданное кольцо (250) обеспечивает передачу вращательного движения ручки (228) направляющим гайкам (260, 261), этим оно похоже на универсальный шарнир с одновременными поворотом и вращением.
В некоторых вариантах края, обеспечивающие контакт направляющих гаек (260, 261) друг с другом, включают зубцы или другие сцепляющие устройства, которые обеспечивают возможности вращения направляющих гаек (260, 261) относительно друг друга, чтобы иметь возможность скорректировать направляющие гайки (260, 261), зафиксированные вместе. В качестве примера это может обеспечить возможности вращения направляющих гаек (260, 261) для того, чтобы выбрать слабину в шарнирных связках (270, 276) и/или компенсировать другие производственные несоответствия.
Кроме того, как показано на фиг.19, рукоятка (220) включает в себя стопор (290) с шарниром (292). Шарнир (292) входит в зацепление с одним из ряда углублений (294), расположенных вокруг проксимального края рукоятки (228). Зажим (290) упруго смещается, чтобы толкать шарнир (292) в углубление (294), так, что шарнир (292) и углубление (294) одной формы фиксирующего устройства. Такая функция может предотвратить случайное вращение ручки (228), тем самым существенно защищая шарнирную связку (236) от случайного выпрямления или наклона. Конечно, инструмент (100) также может включать в себя такое фиксирующее устройство. Кроме того, такое устройство может быть просто полностью изъято.
Фиг.21 показывает типовые альтернативные компоненты, которые могут быть использованы для управления направляющими винтами (283, 284). В частности, на фиг.21 показана типовая альтернативная ручка (229), расположенная вокруг направляющего шарнира (296). Направляющий шарнир (296) включает в себя внешние ребра (297) и внутренний канал ствола (298). Ручка (229), подвижно соединенная с ребрами (297), которые, как и ручка (229), могут быть использованы для свободного вращения направляющего шарнира (296) вокруг продольной оси канала ствола (298), несмотря на ручку (229), ориентированную вдоль плоскости, наклонной к продольной оси канала ствола (298). Канал ствола (298) может включать в себя два набора противоположных резьб (не показано), которые по существу такие же, как резьбы (281, 282). Таким образом, направляющие винты (283, 284) вращением ручки (229) будут одновременно двигать направляющие винты (283, 284) в противоположных направлениях. Другие подходящие вариации компонентов для инструмента (200) будут очевидны специалистам в данной области сообразно с приведенными здесь идеями.
C. Типовое шарнирное управление с полусферически вращающейся ручкой
Фиг.22 изображает типовой электрохирургический инструмент (300), который включает рукоятку (320), ствол (330), расположенный дистально от рукоятки (320), и концевой зажим (340), расположенный на дистальном конце ствола (330). Рукоятка (320) настоящего примера включает в себя пистолетную рукоятку (322), поворотный триггер (324), кнопку активации (326) и вращающуюся шарнирную ручку (328). Триггер (324) может поворачиваться в сторону и обратно к пистолетной рукоятке (322) для выборочной активации концевого зажима (340), как описано выше и как описано в одной или нескольких ссылках, приведенных здесь. Пусковая кнопка (326) выполнена с возможностью выборочной активации радиочастотных цепей, которые сообщаются с концевым зажимом (340), так же, как описано выше и как описано в одной или нескольких ссылках приводимых здесь. Примеры задействования такой блокировки приведены в одной или более ссылках, приложенных к данному документу. Примеры того, как такая блокировка может быть осуществлена, представлены в одной или нескольких приводимых здесь ссылках. Следует понимать, что пистолетная рукоятка (322), триггер (324) и кнопка (326) могут быть изменены, заменены, дополнены и т.д. любым подходящим способом, и описания элементов в настоящем документе являются только иллюстративными. Шарнирное сочленение ручки (328) в данном примере выполнено с возможностью выборочного управления шарнирной частью (336) ствола (330), как будет описано ниже более подробно.
Ствол (330) в данном примере включает внешнюю оболочку (332), шарнирную часть (336) на дистальном конце оболочки (332) и режущий элемент, направляющей трубки (338), что подвижно и коаксиально расположены внутри оболочки (332). Режущий элемент направляющей трубки (338) крепится к режуще-сшивающему элементу (не показан), который является по существу эквивалентным режуще-сшивающему элементу (60), описанному выше. Режущий элемент направляющей трубки (338) продольно подвижен продольно движущемуся режуще-сшивающему элементу. В данном примере направляющая трубка (338) двигается дистально прижатием триггера (324) к пистолетной рукоятке (322), в то время как направляющая трубка (338) отводится проксимально отпусканием триггера (324) и/или движением триггера (324) от пистолетной рукоятки (322). Как показано на фиг.24, скоба (395) связывает триггер (324) с направляющей трубкой (338). Конечно, режуще-сшивающий элемент может быть перемещен в любое другое подходящее положение. Шарнирно-сочлененная часть (336) в данном примере выполнена с возможностью выборочного положения концевого зажима (340) под различными углами относительно продольной оси, определяемой оболочкой (332). Различные примеры форм шарнирной части (336) и других компонентов ствола (330) описаны в различных приводимых здесь ссылках, в то время как другие примеры будут очевидны специалистам в данной области сообразно с представленными здесь идеями. Точно также концевой зажим (340) может быть конфигурирован в соответствии с концевым зажимом (40), описанным выше, в соответствии с идеями из различных ссылок в настоящем документе, и/или любым другим подходящим способом, как будет очевидно специалисту в данной области в свете представленных здесь идей.
В некоторых примерах, ствол (330) также может поворачиваться вокруг продольной оси, определяемой оболочкой (332), относительно рукоятки (320), с помощью ручки (334). Это вращение может обеспечить вращение концевого зажима (340) и ствола (330) как единого целого. В других версиях ручка (334) выполнена с возможностью вращения концевого зажима (340), не вращая другую проксимальную шарнирную часть (336) ствола (330). В качестве еще одного исключительно иллюстративного примера электрохирургический инструмент (300) может включать в себя управление вращением, которое обеспечивает вращаемость ствола (330) и концевого зажима (340) как единого целого; другие подходящие схемы вращения будут видны тем специалистам в данной области, чьи идеи представлены в данном документе. Конечно, вращающиеся компоненты при желании просто могут быть исключены. Конечно, вращающие устройства могут быть просто изъяты, если необходимо. В любой версии устройства, которое обеспечивает вращение ствола (330) и/или концевого зажима (340), ручка (334) и/или ствол (330) и/или концевой зажим (340) могут включать в себя один или несколько маркеров, облегчающих визуальную идентификацию позиции вращения. Например, пользователь может соотносить маркеры на ручке вращения (334) с соответствующим маркером на стволе (330) и/или концевом зажиме (340), чтобы лучше понять направленность этих компонентов по отношению к пациенту и инструменту (300).
Следует понимать, что компоненты ствола (330), которые обеспечивают управление шарнирной частью (336), могут быть теми же, какие описаны выше в ссылке на фиг.6-12 в контексте инструмента (100). Другими словами, устройства на фиг.22-24 могут быть легко объединены с устройствами на фиг.6-12. В данном примере шарнирная связка (376) является функциональным эквивалентом шарнирной связки (160), описанной выше, в то же время шарнирная связка (370) является функциональным эквивалентом шарнирной связки (170), описанной выше. В частности, шарнирно-сочлененные связки (370, 376) могут двигаться в противоположных направлениях и выборочно гнуть шарнирную часть (336) в любом направлении.
Фиг.22-24 показывают различные компоненты рукоятки (320), которые обеспечивают управление вращением шарнирной части (336). В частности, эти компоненты включают в себя ручку вращения (328), которая соединена с зажимом (371), имеющим шестерни (374) на своем дистальном конце. Ствол (372) крепится между двумя частями корпуса (323, 325) и проходит через зажим (371) так, что зажим (371) поворачивается вокруг ствола (372). Как показано на фиг.25, части корпуса (323, 325) включают дополнительные пазы (327, 329), которые обеспечивают желоб для прохода сквозь зажим (371), когда части корпуса (323, 325) скреплены вместе.
Зубчатая шестерня (374) с парой противоположных направляющих (350, 356), вращающийся зажим (371) вокруг ствола (372) двигают направляющие (350, 356) одновременно в противоположных направлениях. Направляющая (350) как единое целое крепится к шарнирной связке (370). Направляющая (356) как единое целое крепится к шарнирной связке (376). Таким образом, вращаясь в одном направлении, зажим (371) и шестерня (374) будут двигать шарнирную связку (370) дистально, одновременно двигая шарнирную связку (376) проксимально, а зажим (371) и шестерня (374), вращающиеся в обратном направлении, будут двигать шарнирную связку (370) проксимально, одновременно двигая шарнирную связку (376) дистально. Следует понимать, что зажим (371) и шестерня (374) могут быть повернуты зацепляющей ручкой (328). Кроме того, следует понимать, что такое вращение будет сгибать шарнирную часть (336) в направлении, зависящем от направления, в котором вращаются ручка (328), зажим (371) и шестерня (374) поворачиваются. В некоторых вариантах пользователь может зацепить ручку (328) большим пальцем руки, держащей пистолетную рукоятку (322), так, что все устройства инструмента (300) могут быть полностью управляемы одной рукой.
Как отмечалось выше, ствол (330) в данном примере может вращаться относительно основного корпуса (321) рукоятки (320). В некоторых вариантах шарнирные связки (370, 376), направляющие (350, 356), ствол (372), зажим (371), ручка (328) и части корпуса (323, 325) - все вращаются вместе со стволом (330) по отношению к основному корпусу (321) рукоятки (320). Таким образом, пользователь может вращать всю эту сборку либо с помощью ручки (334), либо ручки (328) и/или частей корпуса (323, 325). В таких вариантах в плоскости, в которой вращается ручка (328), также будет вращаться ствол (330), тем самым предоставляя пользователю более удобную возможность угла разворота концевого зажима (340) и плоскость управления шарнирной частью (336). В некоторых других вариантах шарнирные связки (370, 376), направляющие (350, 356), ствол (372), зажим (371), ручка (328) и части корпуса (323, 325) остаются неподвижными по отношению к основному корпусу (321) рукоятки (320), в то время как ствол (330) вращается относительно основного корпуса (321) рукоятки (320). Другие подходящие возможности конфигурации для инструмента (300) будут очевидны специалистам в данной области в соответствии с приведенными здесь идеями.
D. Типовое шарнирное управление с вращающейся лопастью
Фиг.26 изображает типовой электрохирургический инструмент (400), который включает рукоятку (420), ствол (430) расширяющийся дистально от рукоятки (420), и концевой зажим (440), расположенный на дистальном конце ствола (430). Рукоятка (420) данного примера включает в себя пистолетную рукоятку (422), вращающийся триггер (424), кнопку активации (426), а также вращающуюся шарнирную лопасть (428). Триггер (424) движется в сторону к пистолетной рукоятке (422) и противоположную, выборочно приводя в действие концевой зажим (440), как описано выше и как описано в одной или нескольких ссылках, приведенных здесь. Кнопка активации (426) выполнена с возможностью выборочно активировать радиочастотные цепи, которые сообщаются с концевым зажимом (440), так же, как и описано выше и как описано в одной или нескольких приведенных здесь ссылках. Примеры задействования такой блокировки приведены в одной или более ссылках, приложенных к данному документу. Примеры того, как такая блокировка может быть осуществлена, представлены в одной или нескольких приведенных здесь ссылках. Следует понимать, что пистолетная рукоятка (422), триггер (424) и кнопка (426) могут быть изменены, заменены, дополнены и т.д. любым подходящим способом, и что описание этих элементов в настоящем документе носит сугубо наглядный характер. Шарнирная лопасть (428) в данном примере выполнена с возможностью выборочного управления шарнирной частью (436) ствола (430), как будет описано более подробно ниже.
Ствол (430) в данном примере включает внешнюю оболочку (432), шарнирную часть (436) на дистальном конце оболочки (432) и режущие элементы направляющей трубки (438), что подвижно и коаксиально расположены внутри оболочки (432). Режущий элемент направляющей трубки (438) крепится к режуще-сшивающему элементу (не показан), который является по существу эквивалентным режуще-сшивающему элементу (60), описанному выше. Режущий элемент направляющей трубки (438) продольно подвижен продольному движению кронштейна. В данном примере направляющая трубка (438) продвигается дистально прижатием триггера (424) к пистолетной рукоятке (422), в то время как направляющую трубку (438) отводят проксимально, отпустив триггер (424) и/или активно двигая триггер (424) от пистолетной рукоятки (422). Как показано на фиг.24, скоба (495) объединяет триггер (424) с направляющей трубкой (438). Конечно, кронштейн может быть перемещен в любую другую подходящую позицию. Шарнирная часть (436) в данном примере выполнена с возможностью выборочного положения концевого зажима (440) под различными углами относительно продольной оси, определяемой оболочкой (432). Различные примеры форм, которые могут принять шарнирная часть (436) и другие элементы ствола (430), описаны в различных, приводимых здесь ссылках, в то время как другие примеры будут очевидны специалистам в данной области наряду с приведенными здесь идеями. Точно так же концевой зажим (440) может быть конфигурирован в соответствии с концевым зажимом (40), описанным выше, в соответствии с идеями в различных ссылках, приведенных в настоящем документе, и/или любым другим подходящим образом, как будет очевидно специалисту в данной области в связи с приведенными здесь идеями.
По некоторым версиям ствол (430) также вращается вокруг продольной оси определенной оболочкой (432) относительно рукоятки (420), с помощью ручки (434). Такое вращение может обеспечить вращение концевого зажима (440) и ствола (430) как единого целого. В некоторых других вариантах ручка (434) выполнена с возможностью вращения концевого зажима (440), не поворачивая другую проксимальную шарнирную часть (436) ствола (430). В качестве еще одного исключительно иллюстративного примера электрохирургического инструмента (400) - наличие возможности включать в себя управление вращением, которое обеспечивает вращаемость ствола (430) и концевого зажима (440) как единого целого. Другие подходящие схемы вращения будут видны тем специалистам в данной области, чьи идеи представлены в данном документе. Конечно, вращающиеся компоненты при желании просто могут быть исключены. Конечно, вращающие устройства могут быть просто изъяты, если необходимо. В любом варианте устройства, которое обеспечивает вращение ствола (430) и/или концевого зажима (440), ручки вращения (434) и/или ствола (430) и/или концевого зажима (440) могут включать в себя один или несколько маркеров, облегчающих визуальную идентификацию углового положения. Например, пользователь может соотносить маркер на ручке вращения (434) с соответствующим маркером на стволе (430) и/или концевом зажиме (440), чтобы лучше понять направленность этих элементов по отношению к пациенту и инструменту (400).
Следует иметь в виду, что элементы ствола (430), которые обеспечивают управление шарнирной частью (436), могут быть такими же, как описано в ссылке выше на фиг.6-12 в контексте инструмента (100). Другими словами, устройства на фиг.26-29 можно легко объединить с устройствами на фиг.6-12. В данном примере шарнирная связка (476) является функциональным эквивалентом шарнирной связки (160), описанной выше, в то же время шарнирная связка (470) является функциональным эквивалентом шарнирной связки (170), описанной выше. В частности, шарнирные связки (470, 476) могут двигаться в противоположных направлениях, выборочно сгибая шарнирную часть (436) в любом направлении.
На фиг.26-29 показаны различные элементы рукоятки (420), которые обеспечивают управление шарнирным сочленением шарнирной части (436). В частности, эти элементы включают в себя вращающуюся лопасть (428), которая соединена с зажимом (471), имеющим пару скоб (474, 478) на своем дистальном конце. Ствол (472) крепится к корпусу (421) рукоятки (420) и проходит через зажим (471) так, что зажим (471) вращается вокруг ствола (472). Следует отметить, что зажим (471) и вращающаяся лопасть (428) отсутствуют на фиг.29 для наглядности. Первое шарнирное плечо (480) включает в себя дистальный конец (482), который подвижно сочленен со скобой (474) с помощью ствола (484). Второе шарнирное плечо (490) включает в себя дистальный конец (492), который подвижно сочленен со скобой (478) с помощью ствола (494). Проксимальный конец (486) первого шарнирного плеча (480) включает в себя связь (488), которая жестко закреплена на проксимальном конце приведенным в действие кронштейном (476). Проксимальный конец (496) шарнирного плеча (490) включает муфту (498), которая жестко закреплена на проксимальном конце приведенным в действие кронштейном (470). Как лучше всего видно на фиг.29, приведенный в действие активирующий элемент (476) проходит через муфту (498). Тем не менее, приведенный в действие активирующий элемент (476) не крепится к муфте (498), так что приведенный в действие активирующий элемент (476) и муфта (498) могут свободно перемещаться относительно друг друга.
Приведенные в действие плечи (480, 490) служат для передачи вращательного движения лопасти (428) и зажиму (471) и поступательного движения приведенных в действие кронштейнов (470, 476). В частности, вращательное движение лопасти (428) в одном направлении передается плечами (480, 490), чтобы дистально двигать шарнирный кронштейн (470), одновременно двигая шарнирный активирующий элемент (476) проксимально. Вращательное движение лопасти (428) в обратном направлении передается с помощью плеч (480, 490), чтобы проксимально двигать шарнирный кронштейн (470), одновременно двигая шарнирный элемент (476) дистально. Кроме того, следует понимать, что такое вращение будет сгибать шарнирную часть (436) в направлении, зависящем от направления, в котором будут вращаться лопасть (428) и зажим (471). В некоторых вариантах пользователь может удерживать лопасть (428) большим пальцем руки, держащей пистолетную рукоятку (422), чтобы всеми устройствами инструмента (400) можно было полностью управлять одной рукой.
В некоторых вариантах положение вращения лопасти (428) может быть избирательно зафиксировано. Например, инструмент (400) может быть конфигурирован использовать лопасть (428) для перемещения по вертикали (вверх или вниз), чтобы разблокировать и/или повернуть лопасть (428). В качестве примера корпус (421) может содержать множество пазов, конфигурированных выборочно получать зажим (471) в зависимости от позиции вращения зажима (471) вокруг ствола (472). Упругий элемент может смещать зажим (471) в зацепление с пазами, так что пользователь должен отклонять зажим (471) от пазов этого упругого смещения для того, чтобы отрегулировать положение лопасти (428). В качестве еще одного наглядного примера инструмент (400) может потребовать толкнуть лопасть (428) дистально или проксимально оттянуть, чтобы разблокировать лопасть (428) для вращательного движения. Опять же, такие функции могут упруго смещать лопасть (428) для блокировки. Другие подходящие способы, в которых позиция вращения лопасти (428) может быть выборочно заблокирована, будут очевидны специалистам в данной области на основании представленных здесь идей. Кроме того, инструменту (400), возможно, просто необходима такая блокировка.
IV. Другие типовые устройства
Следует понимать, что любая из описанных здесь версий электрохирургического инструмента (10) может включать в себя варианты других устройств в дополнение к или вместо тех, которые описаны выше. Несколько примеров таких устройств описаны ниже, в то время как другие устройства будут очевидны специалистам в данной области на основе представленных здесь идей.
A. Типовая электрическая связь
Как отмечалось выше, один или несколько компонентов концевого зажима (40, 140, 240, 340, 440) могут быть связаны с источником питания. Такой источник питания может быть внутренним или внешним по отношению к инструменту (10, 100, 200, 300, 400). Фиг.30-36 показывают несколько типовых элементов, которые могут быть использованы для обеспечения электрического соединения между источником питания и одним или несколькими элементами концевого зажима (40, 140, 240, 340, 440). Хотя примеры на фиг.30-36 показаны в контексте инструмента (100), следует понимать, что эти примеры могут быть легко применены к любой другой версии инструмента (10, 200, 300, 400), описанного здесь. Кроме того, эти примеры могут быть легко применены к различным инструментам, описанным в приводимых здесь ссылках, среди инструментов других типов, как будет очевидно специалисту в данной области на основе идей, приведенных в данном документе.
Как показано на фиг.30, связь (500) крепится к режущему элементу направляющей трубки (138). Связь (500) формируется из электропроводного материала, такого как сталь или другой металл. Связь (500) включает в себя пару плеч (510, 512), которые имеют внешне расширенные свободные концы. Плечи (510, 512), которые конфигурированы вмещать направляющую трубку (138), упруго смещены, чтобы поддерживать контакт с направляющей трубкой (138), так как направляющая трубка (138) способна двигаться и вращаться относительно связи (500). Направляющая трубка (138) также состоит из электропроводного материала, такого как сталь или другой металл. Направляющая трубка (138) также электрически связана с режущим элементом (146) в дополнение к механической связи с режущим элементом (146). Таким образом, направляющая трубка (138) обеспечивает проводящий канал между связью (500) и режущим элементом (146). Плечи (510, 512) отходят от основания (520), которое крепится к корпусу (121) рукоятки (120). Проводка (не показана) соединена с базой (520). Такая проводка может быть дополнительно соединена с источником питания. В данном примере проводка заземлена. В частности, один или несколько электродов концевого зажима (140) служат в качестве активных электродов, в то время как режущий элемент (146) служит в качестве обратного пути заземления. Направляющая трубка (138) и связь (500) также обеспечивают обратный путь заземления от режущего элемента (146) к проводу заземления. Конечно, в некоторых других вариантах эти элементы вместо активных электрических элементов могут служить в качестве заземляющих элементов.
Фиг.32 показывает типовую альтернативную связь (600), которая может быть использована вместо связи (500). Связь в этом примере включает в себя три плеча (610, 612, 630). Плечи (610, 612), по существу, сходны с плечами (510, 512), описанными выше, и включают в себя соответствующие точки касания (614, 616), в которых они соединяются с направляющей трубкой (138). Плечи (610, 612) расположены в одной плоскости и обеспечивают контакт с направляющей трубкой (138) вдоль общей оси (например, вдоль линии, проходящей между точками (614, 616). Плечо (630) расположено вдоль плоскости, перпендикулярной плоскости плеч (610, 612). Плечо (630) упруго смещено (например, как плоская пружина и т.д.), чтобы подогнать точки касания (632) в контакт с направляющей трубкой (138). Таким образом, как показано на фиг.33, связь (600) конфигурирована соприкасаться с направляющей трубкой (138) в трех отдельных точках контакта (614, 616, 632) и в двух перпендикулярных плоскостях/осях. Это может обеспечить более надежную электрическую цепь между связью (600) и направляющей трубкой (138), в том числе когда направляющая трубка (138) перемещается и/или вращается относительно связи (600). Плечи (610, 612, 630) отходят от основания (620), которое может крепиться к корпусу (121) рукоятки (120). Как и с основанием (520), провод (не показано) может быть соединен с основанием (620), указывая обратный путь заземления, или источник питания соединен со связью (600) и далее с режущим элементом (146).
Фиг.34 показывает еще одну типовую альтернативную связь (700), которая может быть использована вместо связи (700). Связь в этом примере включает в себя пару плеч (710, 712). Плечи (710, 712), по существу, сходны с плечами (510, 512), описанными выше, и включают в себя соответствующие точки касания (714, 716), которыми они связаны с направляющей трубкой (138). Плечи (710, 712) расположены вдоль одной плоскости и обеспечивают контакт с направляющей трубкой (138) вдоль общей оси (например, вдоль линии, определяемой между точками (714, 716)). Связь (700) также включает в себя проводящий ствол (732) и проводящий цилиндр (730), которые расположены вдоль плоскости, перпендикулярной плоскости плеч (710, 712). Пружина (не показано) внутри цилиндра (730) упруго смещает ствол (732) от цилиндра (730), вынуждая связь (732) контактировать с направляющей трубкой (138). Таким образом, муфта (700) конфигурирована соприкасаться с направляющей трубкой (138) в трех отдельных точках касания (714, 716, 732) и в двух перпендикулярных плоскостях/осях. Это может обеспечить более надежную электрическую цепь между связью (700) и направляющей трубкой (138), в том числе когда направляющая трубка (138) двигается и/или вращается относительно связи (700). Плечи (710, 712) и цилиндр (730) отходят от основания (720), которое может быть закреплено на корпусе (121) рукоятки (120). Как и с основанием (520), провод (не показано) может быть соединен с основанием (720), указывая обратный путь заземления, или источник питания соединен со связью (700) и далее с режущим элементом (146). Другие подходящие структуры и методы для электрической связи направляющей трубки (138) будут очевидны специалистам в данной области в связи с представленными здесь идеями.
Как отмечалось выше, провод (900) проходит через сепаратор (150) для обеспечения электричеством концевого зажима (140). Например, провод (900) может обеспечивать электричеством один или несколько электродов концевого зажима (140). Таким образом, провод (900) может обеспечивать обратный путь заземления для концевого зажима (140) или может соединять источник питания с концевым зажимом (140). В некоторых версиях провод (900) соединяет источник энергии с одним или более электродами концевого зажима (140), в то время как направляющая трубка (138) служит в качестве обратного пути земли. Фиг.35-36 показывают типовую кондуктивную связь (800), которая может быть использована для электрической связи провода (900) с источником питания или с электрическим заземлением. Связь (800) включает три плеча (810, 820, 830), отходящих от основания (840). Свободные концы (812, 832) плеч (810, 830) ориентированы в одном направлении, а свободный конец (822) плеча (820) ориентирован в противоположном направлении так, что плечи (810, 820, 830) имеют переменную направленность. Как лучше всего видно на фиг.36, каждое плечо (810, 820, 830) включает в себя соответствующую выемку (814, 824, 834). Углубления (814, 824, 834) конфигурированы на наличие провода (900). Плечи (810, 820, 830) упруго смещают, представляя конфигурацию, показанную на фиг.36, такой, что плечи (810, 820, 830) упруго смещены против провода (900), когда провод (900) расположен в углублениях (814, 824, 834). Таким образом, плечи (810, 820, 830) поддерживают непрерывность электрической цепи с проводом (900), даже если провод (900) вращается относительно связи (800). Провод (900) также имеет достаточный предел прочности на кручение, чтобы избежать скручивания или обмотки, когда провод (900) вращается относительно связи (800), так как провод (900) будет вращаться в углублениях (814, 824, 834).
Как показано на фиг.35, связь (800) расположена как раз проксимальнее проксимального конца направляющей трубки (138) и сепаратора (150). Таким образом, провод (900) выходит из среднего полости (152) сепаратора (150) и входит в углубления (814, 824, 834) по существу по прямой линии. В некоторых вариантах провод (900) продолжает прошлую связь (800) и внутри провода оболочки (920), который соединен с корпусом (121). В данном примере, однако, провод (900) заканчивается на уровне или чуть проксимальнее плеча (834). Основание (840) закреплено на корпусе (121) и далее в сочетании с другим проводом (не показан), который соединяет источник питания со связью (800) через основание (840). Этот дополнительный провод может быть соединен с кнопкой (126), может быть связан с модулем управления (не показан), может проходить через оболочку проводов (920) или может быть чем-то непредусмотренным. Другие подходящие структуры и методы для электрической связи провода (900) и/или концевого зажима (140) будут очевидны специалистам в данной области, основываясь на представленных здесь идеях.
B. Типовой вспомогательный обратный ход
Как отмечалось выше, триггер (24, 124, 224, 324, 424) может быть прижат к пистолетной рукоятке (22, 124, 224, 324, 424) для приведения в действие концевого зажима (40, 140, 240, 340, 440). В приведенных выше примерах, пружина (не показана) упруго смещает триггер (24, 124, 224, 324, 424) от пистолетной рукоятки (22, 124, 224, 324, 424). Таким образом, после того как пользователь полностью прижал триггер (24, 124, 224, 324, 424) к пистолетной рукоятке (22, 124, 224, 324, 424) для приведения в действие концевого зажима (40, 140, 240, 340, 440), пользователь может просто отпустить триггер (24, 124, 224, 324, 424), а пружина затем вернет триггеру (24, 124, 224, 324, 424) начальное положение, отведенное от пистолетной рукоятки (22, 124, 224, 324, 424). В некоторых вариантах трение из-за шарнирной части (36, 136, 236, 336, 436) может обеспечить существенное сопротивление возвращению триггера (24, 124, 224, 324, 424) в исходное положение, особенно когда шарнирная часть (36, 136, 236, 336, 436) находится в изогнутой конфигурации. Это сопротивление может быть наиболее выраженным, когда триггер (24, 124, 224, 324, 424) находится в конце своего обратного хода. Поэтому обеспечение дополнительной механической помощи триггеру (24, 124, 224, 324, 424) по мере приближения к концу своего обратного хода может оказаться желательным в некоторых случаях.
Фиг.37A-37C показывают типовые элементы, которые могут быть использованы для оказания помощи обратному ходу триггера (24, 124, 224, 324, 424) из позиции приведенного в действие (например, когда триггер (24, 124, 224, 324, 424) прижат к пистолетной рукоятке (22, 124, 224, 324, 424)) к исходному положению (например, когда триггер (24, 124, 224, 324, 424) повернут от пистолетной рукоятки (22, 124, 224, 324, 424)). В данном примере триггер (1024) подвижно закреплен на корпусе (1021) рукоятки подвижным плечом (1100). Спиральная пружина (1102) расположена между подвижным плечом (1100) и корпусом (1021) и настроена на упругое смещение триггера (1024) в исходное положение, показанное на фиг.37А. Триггер (1024) также включает в себя проксимальное расширение кулачка (1110), которое зацепляет кулачковый рычаг (1200), как будет описано более подробно ниже. Кулачок (1110) включает в себя нижнюю часть (1112) и паз (1114).
Кулачковый рычаг (1200) подвижно закреплен на корпусе (1021) с помощью ствола (1202). Торсионная пружина (1210) соосно расположена вокруг ствола (1202) и упруго смещает кулачковый рычаг (1200) к положению вращения, показанному на фиг.37А. Кулачковый рычаг (1200) включает в себя свободный конец (1220), который расширяется либо к нижней части (1112) кулачка (1110), либо выемки (1114) кулачка (1110), в зависимости от вращательного положения триггера (1024). В частности, свободный конец (1220) остается, по существу, расположенным в пазе (1114), когда триггер (1024) движется из исходного положения (фиг.37A) через угловой диапазон примерно от 15° до частично рабочего положения (фиг.37B). Затем свободный конец (1220) переходит в нижнюю часть (1112) кулачка (1110) и в качестве триггера (1024) продолжает двигаться до полностью рабочего положения (фиг.37С), что составляет примерно 33° от исходного положения в данном примере.
Коэффициент жесткости торсионной пружины (1210) выбран так, что она незначительно увеличивает сопротивление при возвращении триггера (1024) из исходного положения в приведенное в движение положение пользователем. Тем не менее, торсионная пружина (1210) предусматривает значительную помощь спиральной пружине (1102) во возвращении триггера (1024), приведенного в движение, в исходное положение, особенно когда триггер (1024) достигает положения, показанного на фиг.37B. Когда триггер (1024) переходит с полностью рабочего положения, показанного на фиг.37C, в частично рабочее положение, показанное на фиг.37B во время обратного хода, свободный конец (1220) просто едет от нижней стороны (1112) кулачка (1110) и не оказывает существенной помощи спиральной пружине (1102), для возвращения триггера (1024) в исходное положение. Однако как только свободный конец (1220) достигает выемки (1114) во время обратного хода триггера (1024), кулачковый рычаг (1200) находится в лучшем положении по отношению к механическому направляющему кулачку (1100) и торсионной пружине (1210), таким образом обеспечивая существенную помощь спиральной пружине (1102), чтобы вернуть триггер (1024) из положения, показанного на фиг.37B, в исходное положение, показанное на фиг.37А. Конечно, любые другие подходящие элементы, функции и конфигурации могут быть использованы, чтобы помочь возвращению триггера (1024) в исходное положение. Кроме того, такие элементы могут быть просто опущены, если необходимо.
Следует понимать, что любое из устройств, представленных в этом документе, также может включать в себя одну или несколько различных функций, описанных в приложении к патенту США № [Адвокатский реестр № END6888USNP1], озаглавленному "Элементы управления шарнирным хирургическим устройством", зарегистрированному на ту же дату, информация о котором включена посредством ссылки в этот документ; дополнение к патенту США № [Адвокатский реестр № END6889USNP], озаглавлено «Шарнирные элементы шарнирного хирургического устройства», зарегистрировано на ту же дату, информация о котором включена посредством ссылки в этот документ; и/или дополнение к патенту США № [Адвокатский реестр № END6889USNP1], озаглавлен «Элементы шарнирного соединения частей для шарнирного хирургического устройства», внесен в реестр с информацией, раскрытие которой включено посредством ссылки в данный документ.
Кроме того, следует понимать, что любое из устройств, описанных здесь, может быть изменено, чтобы включить электромотор или другое устройство с электрическим приводом для управления элементами с ручным управлением. Различные примеры таких модификаций описаны в приложении к патенту США № 13/151481, озаглавленному «Электрохирургический инструмент с электроприводом и механической и электрической обратной связью», зарегистрированному 2 июня 2011 года, информация о котором включена посредством ссылки в этот документ. Другие подходящие способы, которыми мотор или другие электрически управляемые устройства могут быть включены в любое из устройств, представленных здесь, будут очевидны специалистам в данной области на основе представленных здесь идей.
Кроме того, следует понимать, что любое из устройств, описанных здесь, может быть модифицировано, чтобы содержать большинство, если не все, необходимые компоненты для медицинских устройств. В частности, устройства, описанные здесь, могут быть адаптированы для использования внутреннего или прикрепляемого источника питания вместо подключения к внешнему источнику питания с помощью кабеля. Различные примеры того, как медицинские приборы могут быть адаптированы для включения в них портативного источника питания, представлены в предварительной заявке на патент США, серийный № 61/410603, поданной 5 ноября 2010 года, озаглавленной «Электропотребляющие хирургические инструменты», информация о котором включена посредством ссылки в этот документ.
VI. Прочее
Хотя примеры в настоящем документе описаны в основном в контексте электрохирургических инструментов, следует понимать, что идеи, описанные здесь, могут быть легко применены к целому ряду других видов медицинских инструментов. В качестве примера идеи, представленные здесь, могут быть легко применены к тканевым зажимам, тканевым мешочкам при поиске развертываемых инструментов, хирургическим сшивателям, ультразвуковым хирургическим инструментам и т.д. Следует также понимать, что идеи, приведенные здесь, могут быть легко применены к любому из инструментов, описанных в любой из представленных здесь ссылок, что идеи, представленные здесь, могут легко сочетаться с идеями из любой из цитируемых здесь ссылок множеством вариантов. Другие виды инструментов, в которых могут быть использованы представленные здесь идеи, будут очевидны специалистам в данной области.
В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям настоящего документа, которая была включена в указанный документ посредством ссылки. В связи с этим описание, представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей положениям данного документа, которая была включена в указанный документ посредством ссылки. Любой материал или его часть, которая включена в настоящий документ посредством ссылки и которая противоречит указанным определениям, положениям или другой информации, представленной в настоящем документе, включается в данный документ в той мере, в которой между включенным посредством ссылки материалом и настоящим документом не возникает противоречий.
Варианты данного изобретения применяются в обычных эндоскопических и открытых хирургических приборах, а также в роботизированной хирургии. Например, специалистам в данной области техники будет понятно, что различные, представленные здесь идеи могут легко сочетается с различными идеями из патента США № 6783524, озаглавленного "Роботизированный хирургический инструмент с ультразвуковым прижигающим и режущим инструментом», опубликованного 31 августа 2004 года, информация о котором включена посредством ссылки в данный документ.
Варианты описанных здесь устройств могут быть одноразового и многоразового использования. В одном или обоих случаях варианты устройства могут быть подготовлены к повторному использованию, по меньшей мере после одного использования. Подготовка к повторному использованию может включать в себя любую комбинацию пошаговой разборки, чистки, замены частей и последующей сборки устройства. В частности, варианты устройства могут быть разобраны, и любое количество конкретных деталей или частей устройства может быть выборочно заменено или удалено в любой комбинации. После очистки и/или замены отдельных частей варианты устройства могут быть собраны для последующего использования или в специализированном отделении или персоналом операционного блока непосредственно перед хирургической процедурой. Использование таких методов и полученное в результате их использования устройство входят в сферу действия настоящей заявки.
Использование таких методов и полученное в результате их использования устройство входят в сферу действия настоящей заявки.
Только в качестве примера описанные здесь варианты могут быть обработаны перед операцией. Впервые новый или подержанный инструмент может быть применен и при необходимости очищен. В данном способе стерилизации инструмент помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет Тайвек (TYVEK). В данном способе стерилизации инструмент помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет Тайвек (TYVEK). Контейнер и прибор могут быть помещены в поле облучения, которое может проникнуть в контейнер, например, гамма-излучение, рентгеновские лучи или электроны высокой энергии. Излучение может убить бактерии на инструменте и в контейнере. Стерильный инструмент может быть сохранен в стерильном контейнере. Герметичный контейнер может хранить инструмент стерильным, пока не будет открыт в медицинском учреждении. Устройство также может быть стерилизовано любым другим способом, известным в данной области, включая, но не ограничиваясь бета- или гамма-излучением, окисью этилена или паром.
Показанные и описанные различные варианты осуществления настоящего изобретения, дальнейшая адаптация методов и систем, описанных здесь, могут быть достигнуты путем соответствующих изменений любым специалистом в данной области без отхода от объема настоящего изобретения. Некоторые из таких потенциальных изменений были упомянуты, а другие будут очевидны для специалистов в данной области. Например, примеры, варианты, геометрические параметры, материалы, размеры, пропорции, шаги и тому подобное, описанное выше, являются иллюстративными и не обязательны. Соответственно, объем настоящего изобретения следует рассматривать в условиях данной заявки и понимать, не ограничиваясь деталями структуры и функционирования, показанными и описанными в спецификации и чертежах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕМЕНТЫ ШАРНИРНОГО СОЧЛЕНЕНИЯ ШАРНИРНОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2011 |
|
RU2577811C2 |
| ЭЛЕМЕНТЫ ШАРНИРНОГО СОЧЛЕНЕНИЯ ДЛЯ ШАРНИРНОГО ХИРУРГИЧЕСКОГО УСТРОЙСТВА | 2011 |
|
RU2581713C2 |
| ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ДЛЯ ШАРНИРНОГО ХИРУРГИЧЕСКОГО УСТРОЙСТВА | 2011 |
|
RU2571602C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С АВТОМАТИЧЕСКИ ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ ШАРНИРНОГО КОНЦЕВОГО ЗАХВАТА | 2009 |
|
RU2497468C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ СО СТУПЕНЧАТЫМ СТЕРЖНЕМ | 2014 |
|
RU2661729C2 |
| ПРИВОД ШАРНИРА КОНЦЕВОГО ЭФФЕКТОРА ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА С ШЕСТЕРНЕЙ И ПРОТИВОСТОЯЩИМИ РЕЙКАМИ | 2014 |
|
RU2659019C2 |
| СТЕРИЛИЗУЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2524114C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЛОКИРОВКОЙ ШАРНИРА, ИМЕЮЩЕЙ ДВОЙНУЮ СТОПОРНУЮ ПРУЖИНУ | 2014 |
|
RU2676516C2 |
| ДОСТУП К ДАННЫМ, ХРАНИМЫМ В ПАМЯТИ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2594070C2 |
| КОНФИГУРАЦИЯ ПЕРЕКЛЮЧАТЕЛЯ ПОВОРОТНОЙ РУЧКИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2690595C2 |
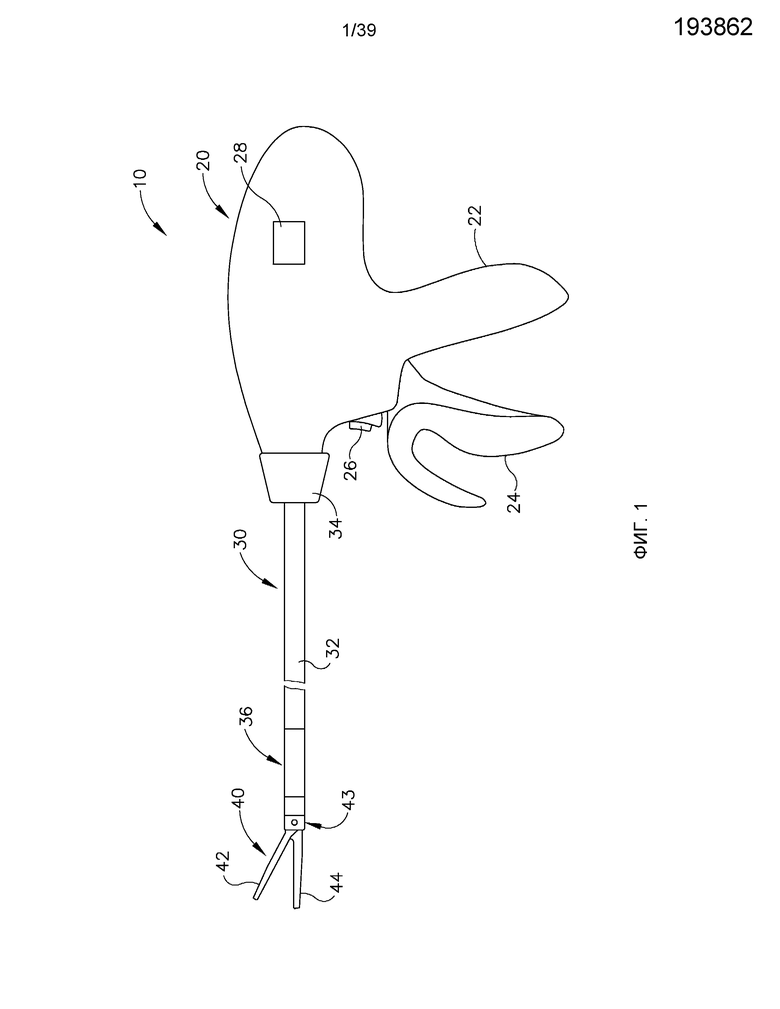



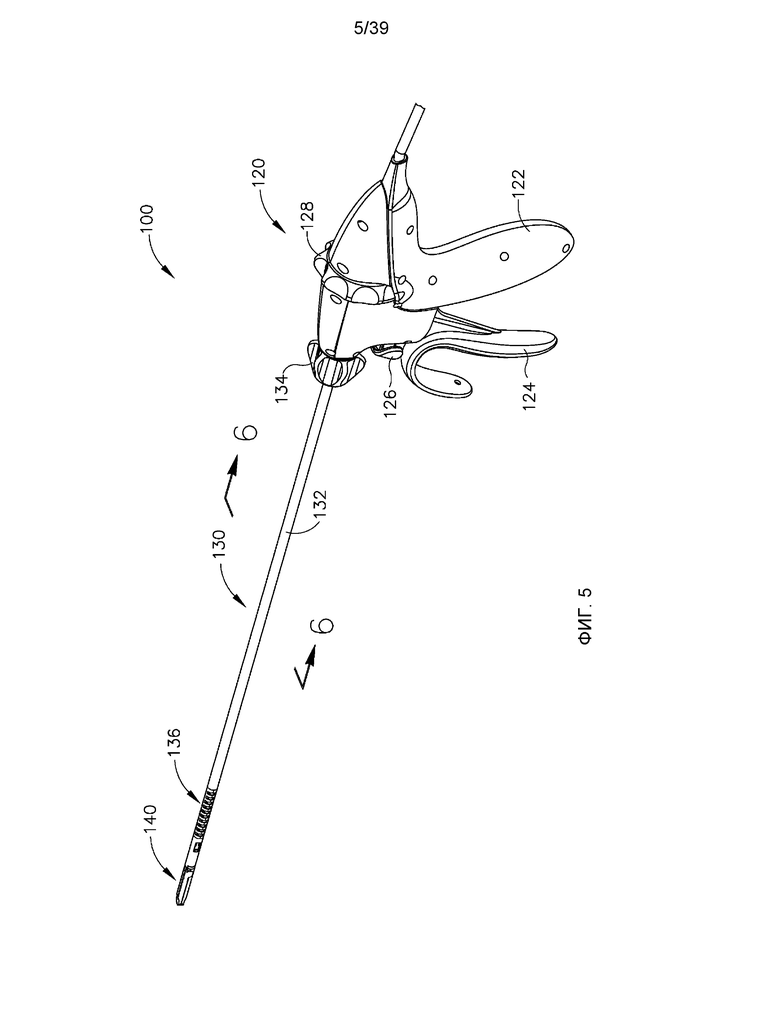


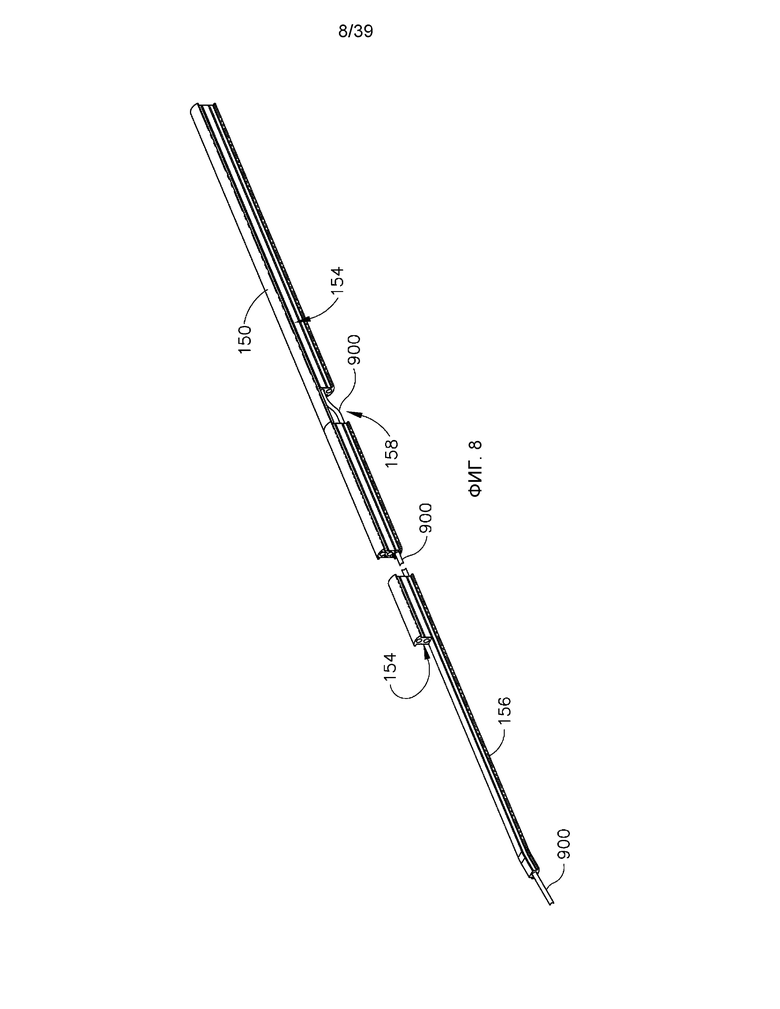

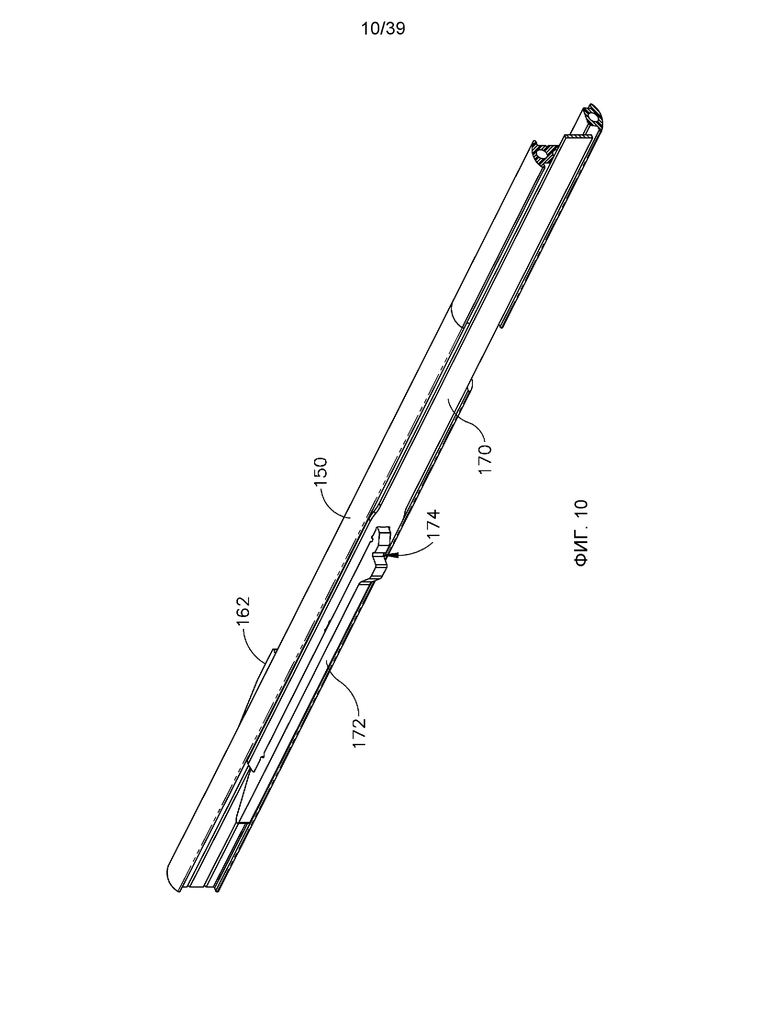


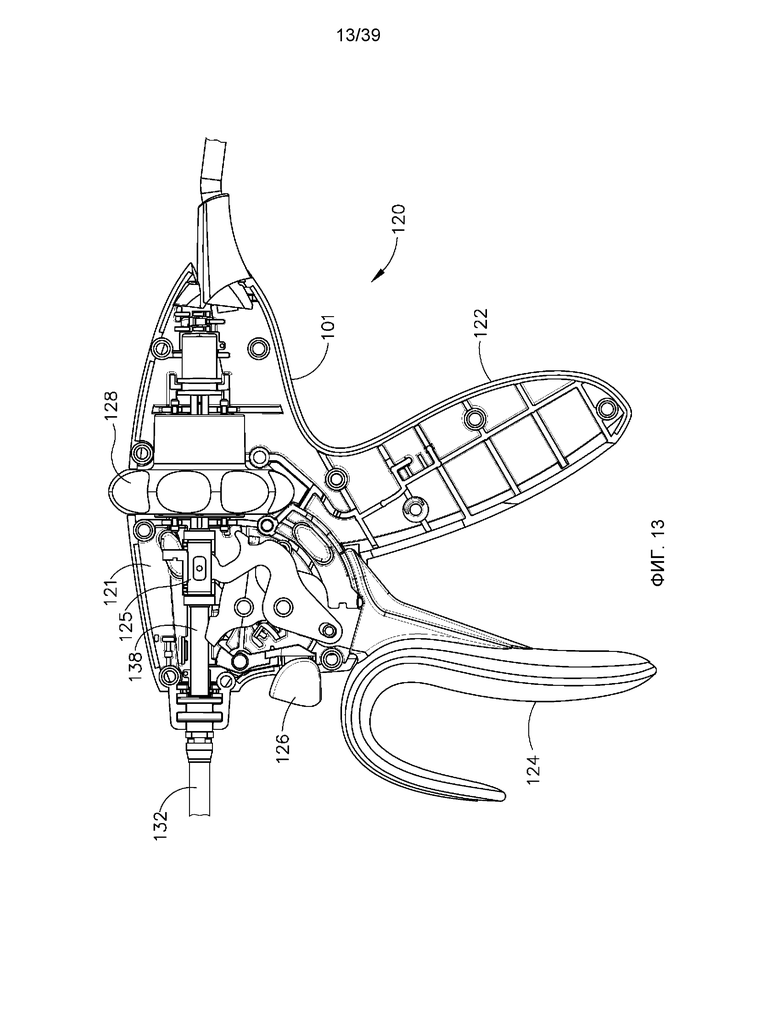
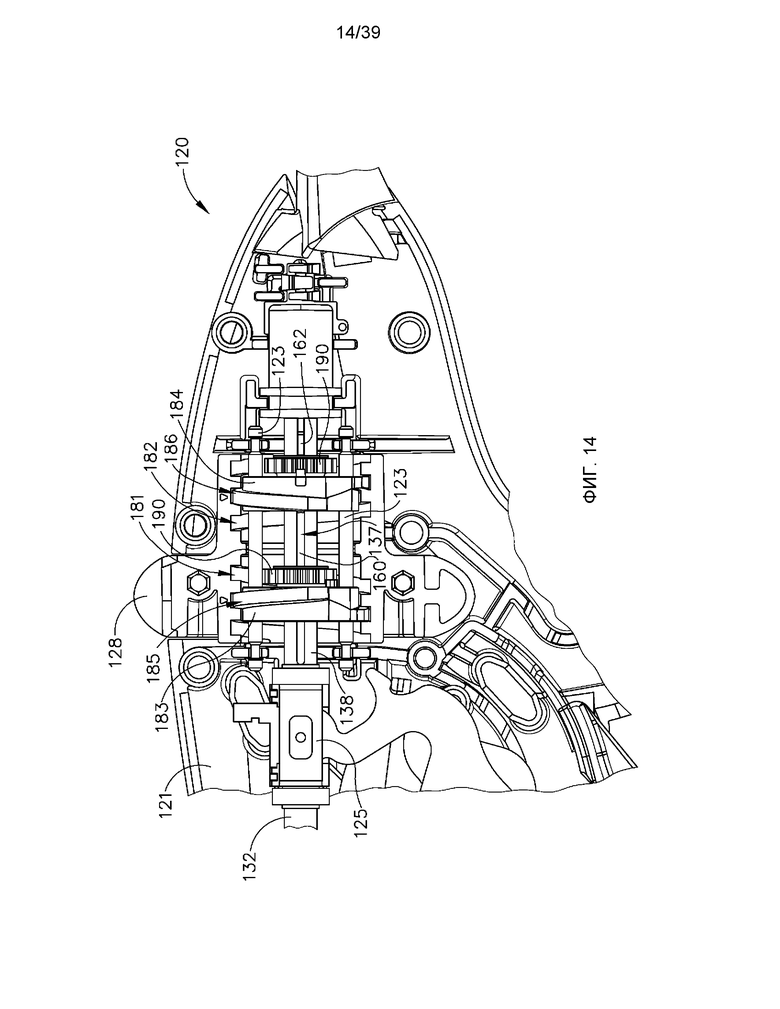
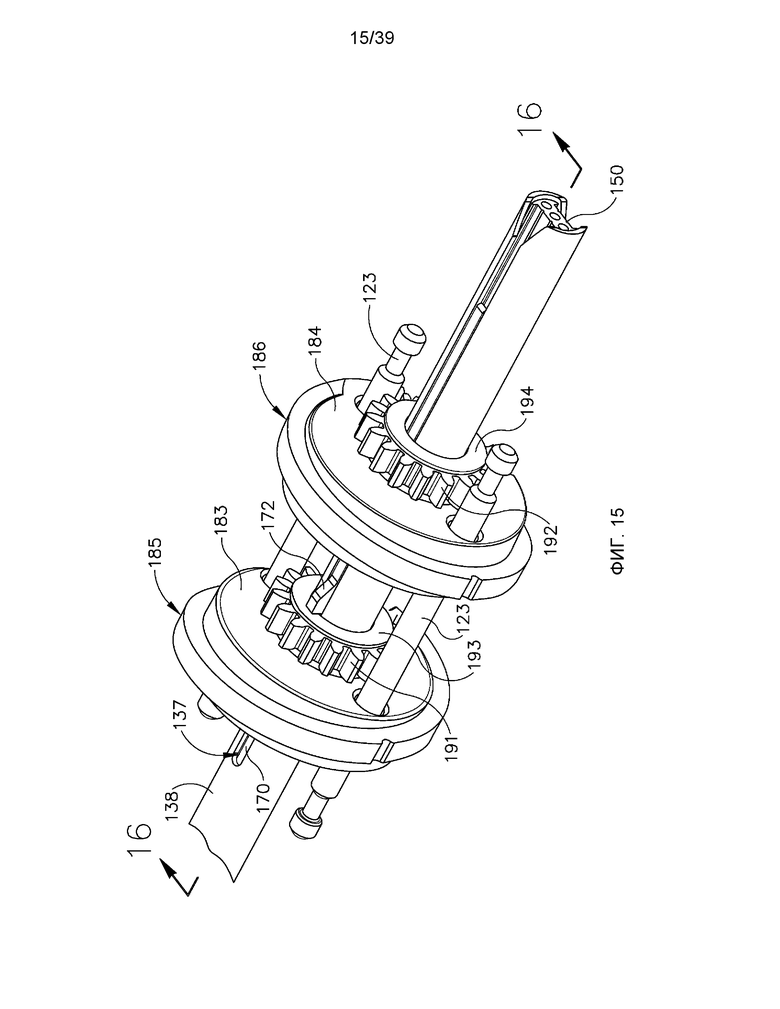



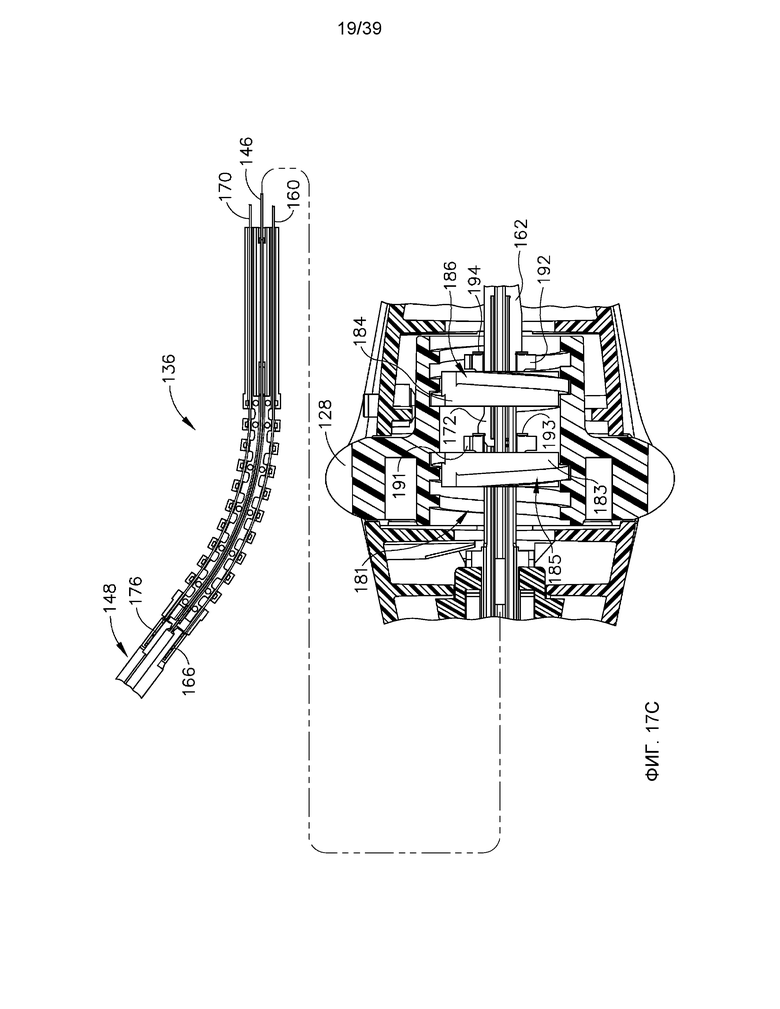
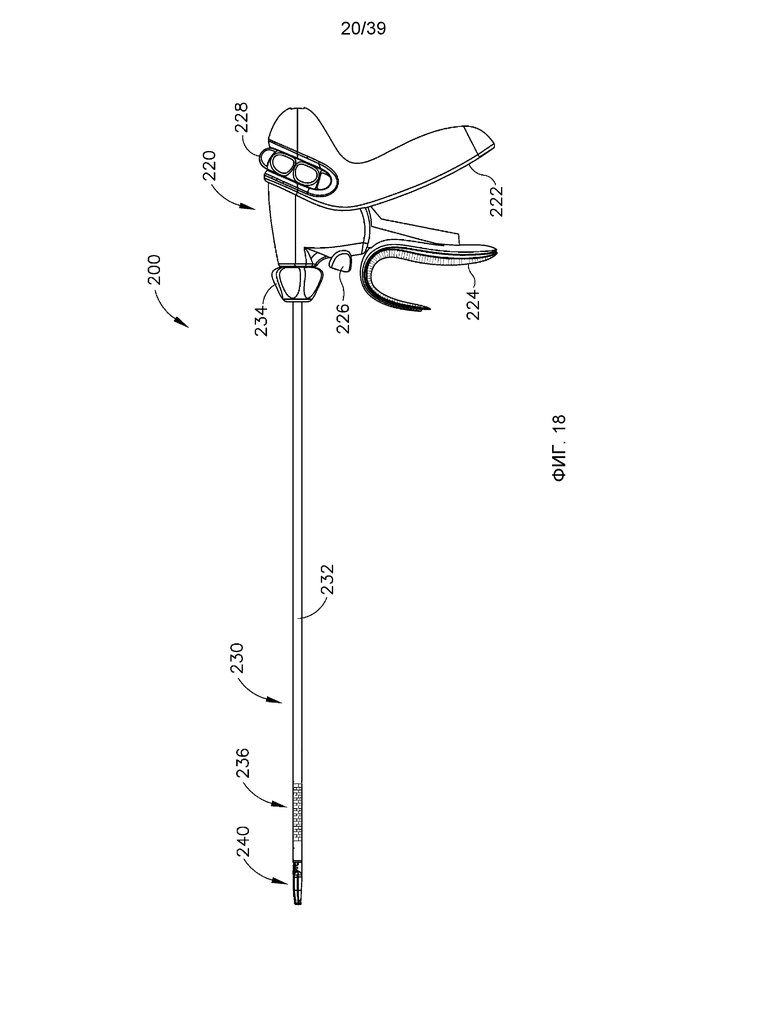



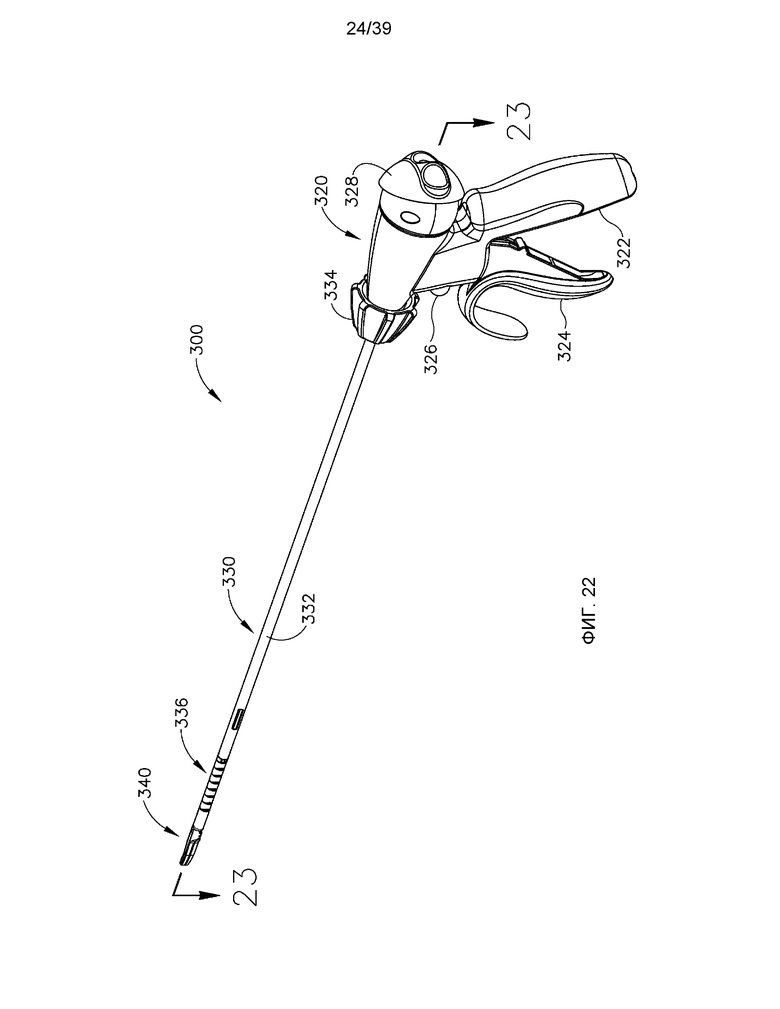





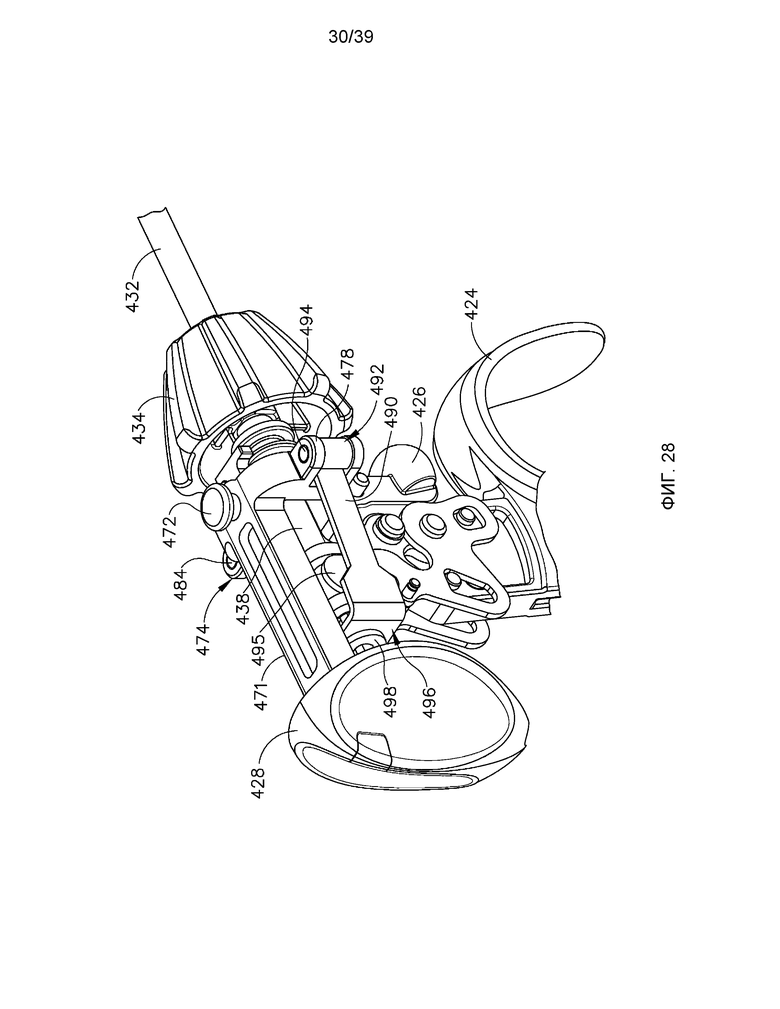




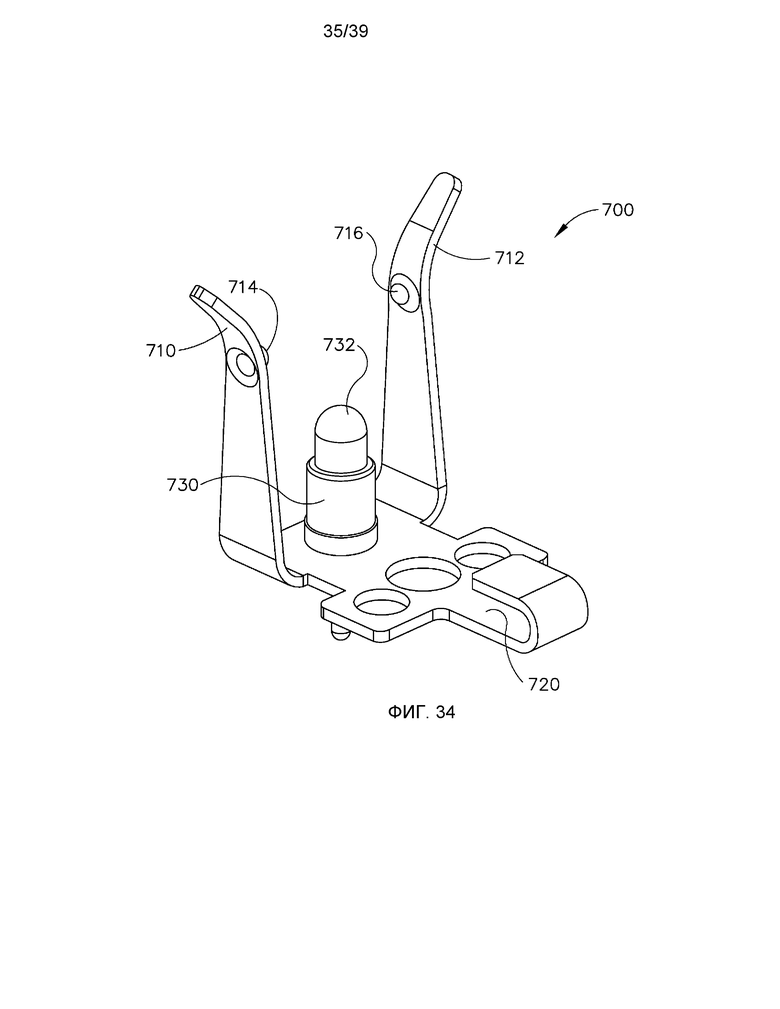


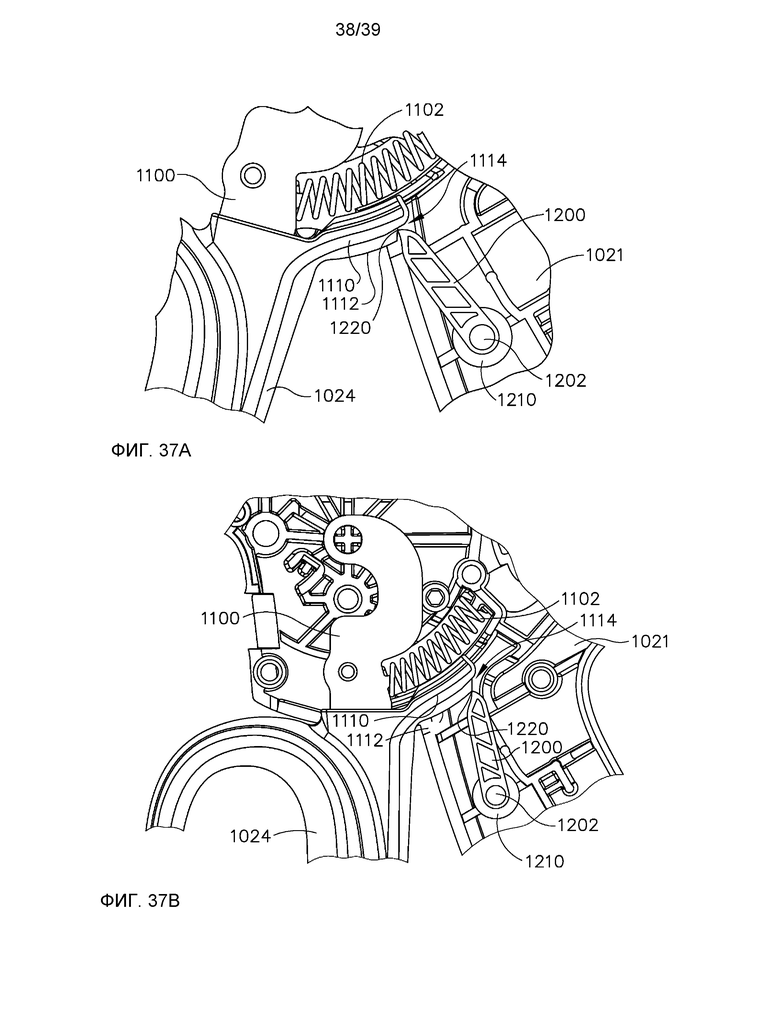

Изобретение относится к медицине. Электрохирургический инструмент содержит корпус, концевой зажим, режущий элемент и ствол. Концевой зажим содержит пару браншей и, по меньшей мере, один электрод, который выполнен для доставки ВЧ энергии в ткани между браншами. Режущий элемент выполнен с возможностью резать ткань между браншами. Ствол содержит шарнирную часть, которая выполнена с возможностью выборочно располагать концевой зажим в непараллельных позициях по отношению к продольной оси ствола. Корпус содержит контроллер, выполненный с возможностью выборочно задействовать шарнирную часть. Контроллер может включать в себя поворотную ручку, вращающуюся ручку или вращающуюся лопасть. Упруго смещаемый рычаг способствует возвращению триггера из рабочего положения в исходное положение. Инструмент имеет удобное управление. 2 н. и 6 з.п. ф-лы, 37 ил.
1. Электрохирургический инструмент, содержащий:
(a) корпус;
(b) концевой зажим, содержащий:
(i) первую браншу, и
(ii) вторую браншу,
где первая бранша способна перемещаться ко второй бранше для зажима ткани между первой и второй браншами,
где по меньшей мере одна из браншей содержит по меньшей мере один электрод,
где указанный по меньшей мере один электрод выполнен с возможностью доставки высокочастотной энергии в ткань, зажатую между первой и второй браншами;
(c) режущий элемент, выполненный с возможностью резать ткань, зажатую между первой и второй браншами; и
(d) ствол, проходящий между корпусом и концевым зажимом, где ствол определяет продольную ось, при этом ствол включает в себя шарнирную часть, где шарнирная часть выполнена с возможностью выборочного положения концевого зажима в непараллельной позиции по отношению к продольной оси ствола, в котором корпус включает в себя контроллер, содержащий ручку и выполненный с возможностью выборочно приводить в движение шарнирную часть, при этом ручка выполнена с возможностью вращения вокруг продольной оси ствола вдоль плоскости, которая расположена под углом к продольной оси ствола.
2. Электрохирургическое устройство п. 1, в котором контроллер дополнительно содержит направляющий шарнир, причем ручка расположена вокруг направляющего шарнира.
3. Электрохирургическое устройство п. 1, в котором контроллер включает в себя первый участок резьбы и второй участок резьбы, где первый участок резьбы включает в себя резьбу, нарезанную в одном направлении, а второй участок резьбы включает в себя резьбу, нарезанную в другом направлении, причем второе направление противоположно первому направлению, где контроллер выполнен с возможностью вращать первый и второй участки резьбы одновременно в одном направлении.
4. Электрохирургическое устройство п. 3, в котором контроллер дополнительно содержит первый направляющий винт, зацепленный с первым участком резьбы, и второй направляющий винт, зацепленный со вторым участком резьбы, где направляющие винты конфигурированы на движение в противоположном направлении в ответ на первый и второй участки резьбы, вращающиеся в одном направлении.
5. Электрохирургическое устройство п. 4, дополнительно содержащее первый шарнирный элемент в сочетании с первым направляющим винтом и второй шарнирный элемент в сочетании со вторым направляющим винтом, в котором первый и второй шарнирные элементы перемещаются в продольном направлении посредством ствола в ответ на перемещение направляющих винтов, чтобы таким образом воздействовать на шарнирную часть.
6. Электрохирургическое устройство п. 5, дополнительно содержащее первый вращающийся элемент, выборочно установленный между первым направляющим винтом и первым шарнирным элементом, позволяющий связывать первый направляющий винт с первым шарнирным элементом.
7. Электрохирургическое устройство п. 1, дополнительно содержащее первую шарнирную связку, продольно расположенную к стволу, и вторую шарнирную связку, продольно расположенную к стволу, где первая и вторая шарнирные связки далее соединены с шарнирной частью для выборочного сгибания или вращения шарнирной части, в котором контроллер выполнен с возможностью двигать шарнирные связки в противоположных направлениях.
8. Хирургический инструмент, содержащий:
(a) корпус;
(b) концевой зажим, где концевой зажим выполнен с возможностью захватывать ткани;
(c) ствол, проходящий между корпусом и концевым зажимом, где ствол определяет продольную ось, при этом ствол включает в себя шарнирную часть, где шарнирная часть выполнена с возможностью выборочного положения концевого зажима в непараллельной позиции по отношению к продольной оси ствола; и
(d) контроллер, выполненный с возможностью выборочного приведения в действие шарнирной части, где контроллер включает в себя:
(i) поворотный элемент, где поворотный элемент способен поворачиваться относительно корпуса,
(ii) первый участок резьбы, где первый участок резьбы включает в себя резьбу, нарезанную в одном направлении,
(iii) второй участок резьбы, где второй участок резьбы включает в себя резьбу, нарезанную в другом направлении, где вращающий элемент выполнен с возможностью вращать первый и второй участки резьбы одновременно в одном направлении,
(iv) первый направляющий винт, зацепленный с первым участком резьбы, а
(v) второй направляющий винт, зацепленный со вторым участком резьбы, где направляющие винты выполнены с возможностью двигаться в противоположных направлениях; в ответ первый и второй участки резьбы вращаются в одном направлении.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 5582617 A, 10.12.1996 | |||
| US 5704534 A, 10.12.1996 | |||
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |
| Хирургический инструмент | 1977 |
|
SU733670A1 |

