Заявление об установлении приоритета
Эта заявка является продолжением части заявки на патент США 12/236, 277, озаглавленной «Доступ к данным, хранящимся в памяти хирургического инструмента», поданной Шелтоном и соавторами 23 сентября 2008 года и испрашивает приоритет заявки на патент США № 11/343, 803 озаглавленной «Хирургический инструмент с возможностью записи данных», поданной Шелтоном и соавторами 31 января 2006 г., которая включена в настоящее описание посредством ссылки во всей своей полноте.
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНЫЕ ИЗОБРЕТЕНИЯ
Настоящая заявка связана со следующими заявками на патенты США, поданными одновременно с заявкой на патент США № 11/343, 803, которые включены в настоящую заявку путем отсылки во всей своей полноте:
(1) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ С ПОЛЬЗОВАТЕЛЕМ, изобретатели: Фредерик Э. Шелтон, IV, Джон Оуверкерк и Джером Р. Морган (Серийный № 11/343,498);
(2) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С ОБРАТНОЙ СВЯЗЬЮ ПО ПАРАМЕТРУ СИЛЫ НАГРУЗКИ, изобретатели: Фредерик Э. Шелтон, IV, Джон Оуверкерк, Джером Р. Морган и Джефри С. Суэйз (Серийный № 11/343,573);
(3) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ, изобретатели: Фредерик Э. Шелтон, IV, Джон Оуверкерк, Джером Р. Морган и Джефри С. Суэйз (Серийный № 11/344,035);
(4) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С АДАПТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ С ПОЛЬЗОВАТЕЛЕМ, изобретатели: Фредерик Э. Шелтон, IV, Джон Оуверкерк и Джером Р. Морган (Серийный № 11/343,447);
(5) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С ШАРНИРНО-ПРИКРЕПЛЕННЫМ КОНЦЕВЫМ ЗАЖИМОМ, изобретатели: Фредерик Э. Шелтон, IV и Кристоф Л. Гиллум (Серийный № 11/343,562);
(6) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С МЕХАНИЧЕСКОЙ ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ, изобретатели: Фредерик Э. Шелтон, IV и Кристоф Л. Гиллум (Серийный № 11/344,024);
(7) РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОТОРЫЙ ПРИВОДИТСЯ В ДЕЙСТВИЕ С ПОМОЩЬЮ ДВИГАТЕЛЯ, С БЛОКИРУЮЩИМ МЕХАНИЗМОМ ЗАКРЫВАЮЩЕГО СПУСКОВОГО УСТРОЙСТВА, изобретатели: Фредерик Э. Шелтон, IV и Кевин Р. Долл (Серийный № 11/343,321);
(8) БЛОК АВТОВЫБОРА ЗУБЧАТОЙ ПЕРЕДАЧИ ДЛЯ РЕЖУЩЕГО И СШИВАЮЩЕГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА С ЭЛЕКТРОПИТАНИЕМ, изобретатели: Фредерик Э. Шелтон, IV, Джефри С. Суэйз, Юджин Л. Тимпермэн, (Серийный № 11/343,563);
(9) ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СО СЪЕМНОЙ БАТАРЕЙКОЙ, изобретатели: Фредерик Э. Шелтон, IV, Кевин Р. Долл, Джефри С. Суэйз и Юджин Тимпермэн (Серийный № 11/344,020);
(10) УСТРОЙСТВА ЭЛЕКТРОННОЙ БЛОКИРОВКИ И ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, СОДЕРЖАЩИЕ УКАЗАННЫЕ УСТРОЙСТВА, изобретатели: Джефри С. Суэйз, Фредерик Э. Шелтон, IV, Кевин Р. Долл (Серийный № 11/343,439);
(11) ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С РУКОЯТКОЙ, КОТОРАЯ МОЖЕТ ШАРНИРНО ПОВОРАЧИВАТЬСЯ ОТНОСИТЕЛЬНО ВАЛА, изобретатели: Фредерик Э. Шелтон, IV, Джефри С. Суэйз, Марк С. Ортиз и Лесли M. Фуджикава (Серийный № 11/343,547);
(12) ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕЖУЩИЙ И СШИВАЮЩИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ПОВОРОТНОЙ СИСТЕМОЙ РЕЗАНИЯ/СШИВАНИЯ И ЗАКРЫТИЯ С ПАРАЛЛЕЛЬНЫМ ВЫРАВНИВАНИЕМ ЗАКРЫВАЮЩЕГО И УПОРНОГО ЭЛЕМЕНТОВ, изобретатели: Фредерик Э. Шелтон, IV, Стефен Дж. Балек и Юджин Л. Тимпермэн (Серийный № 11/344,021);
(13) ОДНОРАЗОВЫЙ КАРТРИДЖ С ШОВНЫМИ СКОБКАМИ, ИМЕЮЩИЙ УПОРНЫЙ ЭЛЕМЕНТ С УСТРОЙСТВОМ РАСПОЛОЖЕНИЯ ТКАНИ, ДЛЯ ИСПОЛЬЗОВАНИЯ С РЕЖУЩИМ И СШИВАЮЩИМ ХИРУРГИЧЕСКИМ ИНСТРУМЕНТ ОМ И СИСТЕМА БЛОЧНО-МОДУЛЬНОГО КОНЦЕВОГО ЗАЖИМА ДЛЯ НЕГО, изобретатели: Фредерик Э. Шелтон, IV, Майкл С Кроппер, Джошуа М. Броэль, Райан С. Крисп, Джемисон Дж. Флоут, Юджин Л. Тимпермэн ( Серийный № 11/343,546); и
(14) ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ, изобретатели: Фредерик Э. Шелтон, IV, Джером Р. Морган, Кевин Р. Долл, Джефри С. Суэйз и Юджин Л. Тимпермэн (Серийный № 11/343,545).
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится в общем к хирургическим инструментам, а более конкретно к наименее инвазивным хирургическим инструментам, способным записывать различные условия инструмента.
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными устройствами открытого хирургического доступа, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Следовательно, была проведена значительная работа по разработке набора эндоскопических хирургических инструментов, которые допускают точное введение дистального рабочего инструмента в желаемое операционное поле через канюлю или троакар. Такие дистальные рабочие инструменты зацепляют ткань множеством способов для достижения диагностического или терапевтического эффекта (такие инструменты, как, например, эндокатер, зажим, рассекатель, сшивающие инструменты, клипсонакладыватель, устройство доступа, устройство для введения медикаментов/генной терапии и устройство подачи энергии для проведения ультразвуковых, РЧ- или лазерных процедур и т.д.).
Известные хирургические сшивающие инструменты содержат концевой зажим, который одновременно выполняет продольное рассечение в ткани и накладывает ряды скобок на противоположные стороны рассечения. Концевой зажим содержит пару согласованно действующих браншей, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, способны проходить по проходному каналу канюли. Одна бранша вмещает картридж для скобок, содержащий, по меньшей мере, два латерально разнесенных ряда скобок. Другая бранша представляет собой упорный элемент с формирующими скобу углублениями, расположенными соответственно рядам скобок в картридже. Инструмент содержит множество возвратно-поступательно перемещающихся клиньев, которые при приведении в движение наружу проходят сквозь отверстия в картридже для скобок и входят в контакт с направляющими, служащими опорой для скобок, для выполнения выталкивания скобок в сторону упорного элемента.
Пример хирургического сшивающего инструмента, подходящего для эндоскопического применения, описан в патенте США 5,465,895, озаглавленном «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», изобретатели: Нодель и соавторы, который содержит описание эндоскопического рассекателя с раздельными смыкающим и сшивающим/режущим действиями. Врач, использующий данное устройство, может смыкать бранши на ткани для позиционирования ткани перед сшиванием/резанием. После того как хирург убедится в том, что бранши надежно удерживают ткань, он может запустить хирургический сшивающий инструмент с одним или несколькими ходами, в зависимости от модификации устройства. Сшивание/резание хирургическим сшивающим инструментом приводит к рассечению и сшиванию тканей. Одновременное рассечение и сшивание тканей исключает осложнения, которые могут возникать при поочередном выполнении этих операций разными хирургическими инструментами, например, только режущими или только сшивающими.
Особое преимущество возможности фиксирования ткани перед пуском инструмента состоит в том, что хирург имеет возможность убедиться (с помощью эндоскопа) в достижении места, в котором предполагается выполнить рассечение, а также в том, что бранши удерживают достаточное количество ткани. В противном случае противолежащие бранши зажима могут быть сведены слишком близко, особенно на дистальных концах, неэффективно фиксируя скобы в рассеченной ткани. С другой стороны, избыточное количество зажатой ткани может приводить к заклиниванию и незавершенности процесса сшивания.
Если эндоскопические хирургические инструменты выходят из строя, их часто возвращают производителю или в другую организацию для проведения анализа неисправности. Если неисправность привела к дефекту в инструменте критического класса, производителю необходимо определить причину неисправности и определить, требуется ли изменение конструкции. В этом случае производитель может потратить сотни человеко-часов, анализируя вышедший из строя инструмент и пытаясь воссоздать условия, при которых он вышел из строя, основываясь только на повреждении прибора. Такой способ анализа инструмента может быть дорогостоящим и очень сложным. Кроме того, заключением многих таких анализов является утверждение, что сбой произошел в результате неправильного использования инструмента.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
По одному общему аспекту настоящее изобретение направлено на процесс и систему загрузки данных датчика, хранимых в памяти устройства режущего и сшивающего хирургического инструмента, на внешний или удаленный компьютер. В соответствии с различными вариантами осуществления процесс включает хранение данных от одного или более датчиков режущего и сшивающего хирургического инструмента в запоминающем устройстве блока управления режущего и сшивающего хирургического инструмента на протяжение хирургической операции с использованием режущего и сшивающего хирургического инструмента. Далее, после хирургической операции устанавливается канал передачи данных между блоком управления и удаленным компьютером. После этого данные от датчика могут быть загружены с блока управления на удаленный компьютер. Датчиками могут являться, например: датчик закрывающего спускового устройства, который определяет приведение в действие закрывающего спускового устройства; датчик закрытия упорного элемента для определения закрытия упорного элемента; тензодатчик закрытия упорного элемента, который определяет нагрузку на картридж со скобками, на который надавливает упорный элемент, когда он закрыт; датчик пускового устройства для определения приведения в действие пускового устройства; датчик положения скальпеля для определения положения скальпеля в концевом зажиме; датчик наличия картриджа для определения наличия картриджа в концевом зажиме; датчик состояния картриджа для определения состояния картриджа; и датчик шарнира для определения сочленения концевого зажима.
Согласно изобретению предложен режущий и сшивающий хирургический инструмент, содержащий:
a. концевой зажим, содержащий упорный элемент с функцией формирования шовных скобок, на нем корпус в общем расположенный напротив упорного элемента, предназначенный для размещения картриджа, и сменный картридж, содержащий шовные скобки, которые могут быть вытолкнуты из картриджа движением наружу клина введения, и по меньшей мере один датчик;
b. удлиненный вал, имеющий в нем двигатель, функционально связанный с механизмом приведения в действие, указанный вал, имеет по меньшей мере одно шарнирное соединение для размещения
картриджа под углом, а не параллельно, продольной оси указанного вала;
c. электрически связанную консоль приведения в действие на дистанционном управлении;
d. линейный преобразователь движения привода для преобразования вращательного движения упомянутого двигателя в линейное движение.
ФИГУРЫ
В настоящем документе приводится описание различных вариантов осуществления настоящего изобретения на примерах, иллюстрируемых следующими изображениями:
На ФИГ. 1 и 2 представлены виды в перспективе режущего и сшивающего хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 3-5 представлены виды с пространственным разделением деталей концевого зажима и ствола инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 6 представлен вид сбоку концевого зажима в
соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 7 представлен вид с пространственным разделением деталей рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 8 и 9 представлены местные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 10 представлен вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 10A и 10B представлено изображение пропорционального датчика, который может использоваться в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 11 представлено схематическое изображение электрической схемы, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 12-13 представлены виды сбоку рукоятки в соответствии с другими вариантами осуществления настоящего изобретения;
На ФИГ. 14-22 представлено изображения различных механизмов для фиксации закрывающего пускового устройства в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 23A-B представлено изображение универсального шарнира (u-образного шарнира), который можно использовать в точке сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 24A-B представлено изображение торсионного троса, который можно использовать в точке сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 25-31 представлено изображение режущего и сшивающего хирургического инструмента с усилением в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 32-36 представлено изображение режущего и сшивающего хирургического инструмента с усилением в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 37-40 представлен хирургический режущий и сшивающий инструмент с тактильной обратной связью в рамках вариантов осуществления настоящего изобретения;
На ФИГ. 41 представлен вид с пространственным разделением деталей концевого зажима и ствола инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 42 представлен вид сбоку рукоятки инструмента, который приводится в действие механическим путем, в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 43 представлено перспективное изображение в разобранном виде рукоятки инструмента, изображенного на ФИГ. 42, который приводится в действие механическим путем;
На ФИГ. 44 представлена функциональная схема системы записи для записи различных условий инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 45-46 представлен вид сбоку с вырезом рукоятки инструмента, иллюстрирующий различные датчики в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 47 представлен концевой зажим инструмента, иллюстрирующий различные датчики в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 48 представлен стержень пускового механизма инструмента, содержащий датчик, в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 49 представлен вид сбоку рукоятки, концевого зажима и стержня пускового механизма инструмента, иллюстрирующий датчик, в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 50 представлено перспективное изображение в разобранном виде желоба для скоб и части картриджа со скобками инструмента с датчиками, в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 51 показано иерархически организованное представление желоба шовных скобок инструмента, иллюстрирующее различные датчики, в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 52A и 52B представлена блок-схема, показывающая способ работы инструмента в соответствии с различными вариантами осуществления;
На ФИГ. 53 представлена схема запоминания, показывающая возможный вариант записанных условий инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 54 показана функциональная схема записывающей системы для записи различных условий инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
На ФИГ. 55 представлено изображение, иллюстрирующее хирургический инструмент, обменивающийся данными с удаленным компьютером; и
На ФИГ. 56 показана блок-схема, описывающая процесс в соответствии с различными вариантами осуществления настоящего изобретения;
ПОДРОБНОЕ ОПИСАНИЕ
На ФИГ. 1 и 2 изображен режущий и сшивающий хирургический инструмент 10 в соответствии с различными вариантами осуществления настоящего изобретения. Представленный на фигурах вариант осуществления предусматривает эндоскопический хирургический инструмент 10 и в целом отражает варианты осуществления инструмента 10, описанные в настоящем документе, а также режущие и сшивающие эндохирургические инструменты. Следует отметить, однако, что в соответствии с другими вариантами осуществления настоящего изобретения инструмент может быть неэндоскопическим режущим хирургическим инструментом, например лапароскопическим инструментом.
Хирургический инструмент 10, изображенный на ФИГ. 1 и 2, содержит рукоятку 6, ствол 8 и шарнирный концевой зажим 12, соединенный со стволом 8 шарнирным сочленением 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. Необходимо принять во внимание, что различные варианты осуществления могут включать неповоротный концевой зажим и, следовательно, могут не иметь шарнирного сочленения 14 или устройства управления шарнирным сочленением 16. Также в представленном варианте осуществления концевой зажим 12 выполнен в виде эндокатера для фиксации, рассечения и сшивания тканей, однако в других вариантах осуществления могут использоваться иные типы концевых зажимов, предназначенные для других типов хирургических устройств, такие как зажимы, рассекатели, сшивающие инструменты, устройства для наложения скобок, устройства доступа, устройства для введения медикаментов/генной терапии, проведения ультразвуковых, РЧ- или лазерных процедур и т.д.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и спусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы спусковых устройств или иных соответствующих средств управления концевым зажимом 12. Концевой зажим 12 показан отдельно от рукоятки 6, рядом с предпочтительно удлиненным стволом 8. В одном варианте осуществления врач или оператор инструмента 12 может шарнирно поворачивать концевой зажим 12 относительно стержня 8 с помощью устройства 16 управления, шарнирным поворотом, как более подробно описано в находящейся на рассмотрении заявке на патент США 11/329,020, поданной 10 января 2006 г., «Хирургический инструмент с шарнирно поворачивающимся концевым зажимом», изобретателей Джефри C. Хюэйл и соавторов, которая включена в настоящее описание путем отсылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет канал для скобок 22 и шарнирно перемещаемый зажимной элемент, например, упорный элемент 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание скобками, а также рассечение ткани, захваченной концевым зажимом 12. Рукоятка 6 содержит пистолетную рукоятку 26, к которой врач прижимает закрывающее пусковое устройство 18 для сжатия или закрывания упорного элемента 24 к каналу для скобок 22 концевого зажима 12, чтобы зажать ткань, находящуюся между упорной пластиной 24 и каналом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего пускового устройства 18. Как только закрывающее пусковое устройство 18 фиксируется в закрытом положении, как дополнительно описано ниже, пусковое устройство 20 может без усилий прижаться к пистолетной рукоятке 26, поэтому оператор может осуществлять такую манипуляцию одной рукой. Затем оператор может прижать спусковое устройство 20 к пистолетной рукоятке 26, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. В других вариантах осуществления помимо упорного элемента 24 могут использоваться другие зажимные элементы, например, вторая бранша и т.д.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему браншу 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к фигурам. Однако хирургические инструменты используются во множестве ориентаций и положений, поэтому данные термины не являются абсолютными и не ограничивают настоящее изобретение.
При пользовании инструментом сначала можно активизировать закрывающее пусковое устройство 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого может быть нажат спусковой крючок 20. Пусковое устройство 20 возвращается в открытое положение (как показано на ФИГ. 1 и 2), когда хирург устраняет давление, как более подробно описано ниже. Для того чтобы разблокировать закрывающее пусковое устройство 18, необходимо нажать кнопку фиксации на бранше 6. Кнопка фиксации может быть выполнена в разных видах, например, в виде кнопки фиксации 30, представленной на ФИГ. 42-43, скользящей кнопки фиксации 160, представленной на ФИГ. 14, и (или) кнопки 172, представленной на ФИГ. 16.
На ФИГ. 3-6 показаны варианты осуществления вращающегося концевого зажима 12 и ствола 8 согласно различным вариантам осуществления изобретения. На ФИГ. 3 представлен разобранный вид концевого зажима 12 в соответствии с различными вариантами осуществления. Как показано на фигуре, концевой зажим 12, помимо ранее указанного желоба 22 и упорного элемента 24, может включать режущий инструмент 32, салазки 33, съемный картридж со скобками 34, установленный в желобе 22, и винтовой вал 36. Режущий инструмент 32 может, например, являться скальпелем. Упорная пластина 24 может открываться и закрываться на оси шарнира 25, соединенной с проксимальным концом желоба 22. Упорная пластина 24 также на проксимальном конце может иметь петлю 27, вставленную в часть механизма закрытия (описан ниже) для открывания и закрывания упорного элемента 24. Когда закрывающее пусковое устройство 18 приводится в действие, то есть отводится пользователем инструмента 10, упорная пластина 24 может поворачиваться вокруг оси шарнира 25 в фиксированное, или закрытое, положение. Если фиксация концевого зажима 12 является удовлетворительной, оператор может привести в действие пусковое устройство 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются вдоль желоба 22, рассекая ткани, зафиксированные концевым зажимом 12. В результате движения салазок 33 вдоль желоба 22 скобы (не показаны) из картриджа 34 прошивают рассеченные ткани, упираясь в прижатый упорный элемент 24, которая сгибает их, фиксируя рассеченные ткани. В некоторых вариантах осуществления салазки 33 могут являться составным компонентом картриджа 34. Патент США 6,978,921, озаглавленный «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОННО-ЛУЧЕВЫМ МЕХАНИЗМОМ РЕЗАНИЯ/СШИВАНИЯ», изобретателей Шелтона, IV и соавторов, который включен в настоящее описание путем отсылки, обеспечивает дополнительные сведения о такого рода двух-ходовых режущих и сшивающих инструментах. Салазки 33 могут являться частью картриджа 34, при этом, когда скальпель 32 втягивается после рассечения ткани, салазки 33 не втягиваются.
Необходимо отметить, что, несмотря на то, что в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой зажим 12, сшивающий скобками рассеченную ткань, в других вариантах осуществления могут использоваться другие способы стягивания или сшивания рассеченной ткани. Например, могут также применяться концевые зажимы, использующие для стягивания рассеченной ткани энергию радиоволн или клеящие вещества. Патент США № 5,709,680, озаглавленный «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО» изобретателей Ятеса и соавторов., и Патент США № 5,688,270, озаглавленный «ЭЛЕКТРОХИРУРГИЧЕСКОЕ ГЕМОСТАТИЧЕСКОЕ УСТРОЙСТВО С УСТАНОВЛЕННЫМИ ЗАПОДЛИЦО И/ИЛИ ВЫНЕСЕННЫМИ ЭЛЕКТРОДАМИ» изобретателей Ятеса и соавторов, которые включены в настоящее описание путем отсылки, описывают эндоскопический режущий инструмент, использующий РЧ энергию для спаивания рассеченных тканей. Патент США № 11/267,811 изобретателей Джерома Р. Моргана, и соавторов и Патент США № 11/267,383 изобретателей Фредерика Э. Шелтона, IV, и соавторов, которые также включены в настоящее описание путем отсылки, описывают режущие инструменты, которые используют клеящие вещества для склеивания рассеченных тканей. В соответствии с изложенным выше, несмотря на то что приведенное в настоящем документе описание относится к манипуляциям по рассечению/сшиванию и аналогичным операциям, описанным ниже, необходимо понимать, что данный вариант осуществления является примером и не ограничивает настоящее изобретение. Могут также использоваться другие способы сшивания тканей.
На ФИГ. 4 и 5 представлено перспективное изображение в разобранном виде, а на ФИГ. 6 представлен вид сбоку концевого зажима 12 и ствола 8 в соответствии с различными вариантами осуществления изобретения. Как показано в проиллюстрированном варианте осуществления, ствол 8 может включать проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упорной пластине 24, чтобы открывать и закрывать упорный элемент 24, как более подробно описано ниже. Непосредственно внутри закрывающих трубок 40 и 42 может быть расположена сердцевинная трубка 46. Непосредственно внутри сердцевинной трубки 46 может быть расположен основной вращательный (или проксимальный) приводной вал 48, который соединяется со вспомогательным (или дистальным) приводным валом 50 с помощью комплекта конических зубчатых колес 52. Вспомогательный приводной вал 50 соединен с приводным механизмом 54, который приводит в действие проксимальный приводной механизм 56 винтового вала 36. Вертикальная коническая шестерня 52 b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. В дистальную сердцевинную трубку 58 могут быть вставлены вспомогательный приводной вал 50 и приводные механизмы 54 и 56. В совокупности основной приводной вал 48, вспомогательный приводной вал 50 и блок сочленения (например, блок конических зубчатых колес 52a-c) в настоящем документе в некоторых случаях упоминаются как «блок основного приводного вала».
Приводной винт 36 посажен в подшипник 38, расположенный на дистальном конце желоба для скоб 22, что позволяет приводному винту 36 свободно вращаться относительно желоба 22. Винтовой вал 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 таким образом, что при вращении вала 36 скальпель 32 перемещается дистально или проксимально (в зависимости от направления вращения) в желобе для скоб 22. Соответственно, когда основной приводной вал 48 при приведении в действие пускового устройства 20 (как более подробно описано ниже) вращается, блок конических зубчатых колес 52a-c инициирует вращение вспомогательного приводного вала 50, который, в свою очередь, вследствие соединения приводных механизмов 54 и 56, инициирует вращение винтового стержня 36, что принуждает продвигающий скальпель элемент 32 перемещаться вдоль канала 22 и рассекать ткань, захваченную концевым зажимом 12. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Когда салазки 33 проходят желоб 22, наклоненная вперед поверхность может протолкнуть вверх или переместить скобы из картриджа для скоб через зажатую ткань, уперев их в упорный элемент 24. Упорная пластина 24 сгибает скобы, скрепляя таким образом рассеченные ткани. Когда скальпель 32 втянут, скальпель 32 и салазки 33 могут разъединяться, при этом салазки 33 остаются на дистальном конце желоба 22.
Как описано выше, из-за отсутствия обратной связи от операции резания/сшивания среди врачей вообще не существует признания эндоскопических рассекателей с электроприводом, с помощью которых рассечение/сшивание производится всего лишь нажатием кнопки. В противоположность этому, варианты осуществления настоящего изобретения предоставляют эндоскопический рассекатель с электроприводом и обратной связью с пользователем, которая предоставляет информацию о расположении, силе и/или размещении режущего инструмента 32 и концевого зажима 12.
На ФИГ. 7-10 представлен пример варианта осуществления автоматического эндокатера, и в частности его рукоятки, который предоставляет пользователю обратную связь о приведении в рабочее положение и силе нагрузки на режущий инструмент 32 в концевом зажиме 12. Кроме того, данный вариант осуществления может использовать силу, приложенную пользователем во время нажатия спускового устройства 20, для увеличения производительности устройства (так называемый «усиленный режим»). Данный вариант осуществления может использоваться с вращающимся концевым зажимом 12 и стволом 8 в вариантах осуществления изобретения, описанных выше. Как показано в проиллюстрированном варианте осуществления, рукоятка 6 включает детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. Часть пистолетной рукоятки 26 рукоятки 6 может быть оснащена батареей 64, например, литий-ионной батареей. Батарея 64 обеспечивает энергией электродвигатель 65, расположенный в верхней части пистолетной рукоятки 26 рукоятки 6. Согласно различным вариантам осуществления, двигатель 65 может быть приводным щеточным двигателем постоянного тока с максимальной скоростью вращения приблизительно 25 000 оборотов в минуту. Могут также использоваться другие подходящие типы электродвигателей. Двигатель 65 может приводить в движение блок 90° конических зубчатых колес 66, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Блок конических зубчатых колес 66 может приводить в действие блок планетарных шестерен 72. Блок планетарных шестерен 72 может включать ведущую шестерню 74, соединенную с приводным валом 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной вал 82 приводит в действие барабан с винтовым зубчатым колесом 80. Кольцо 84 может быть навинчено на барабан с винтовым зубчатым колесом 80. Таким образом, при вращении двигателя 65 кольцо 84 двигается вдоль барабана с винтовым зубчатым колесом 80 с помощью установленного блока конических зубчатых колес 66, блока планетарных шестерней 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать датчик запуска двигателя 110 (см. ФИГ. 10), связанный с пусковым устройством 20, для определения того, что пусковое устройство 20 притянуто (или закрыто) оператором к пистолетной рукоятке 26 рукоятки 6, и тем самым инициировать рассечение/сшивание ткани концевым зажимом 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда спусковое устройство 20 находится в прижатом состоянии, датчик 110 определяет движение и направляет электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к двигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, вращение двигателя 65 может быть, как правило, пропорционально величине смещения спускового устройства 20. Таким образом, когда оператор слегка прижимает или закрывает спусковое устройство 20, двигатель 65 вращается сравнительно медленно. Когда пусковое устройство 20 полностью прижато (или находится в полностью закрытом положении), вращение двигателя 65 максимально. То есть, чем сильнее пользователь прижимает пусковое устройство 20, тем большее напряжение подается на двигатель 65, обеспечивая большую скорость вращения.
Рукоятка 6 может включать срединную часть рукоятки 104, примыкающую к верхней части спускового устройства 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и спусковом устройстве 20. Смещающая пружина 112 может смещать спусковое устройство 20 в полностью открытое положение. Таким образом, когда оператор разблокирует спусковое устройство 20, смещающая пружина 112 переводит спусковое устройство 20 в открытое положение, тем самым предупреждая срабатывание датчика 110, что приводит к остановке двигателя 65. Кроме того, благодаря наличию смещающей пружины 112, каждый раз, когда пользователь закрывает спусковое устройство 20, он чувствует сопротивление, что позволяет контролировать скорость вращения двигателя 65. Также оператор может прекратить воздействие на спусковое устройство 20 и тем самым прекратить воздействие на датчик 100 и остановить двигатель 65. Таким образом, пользователь может остановить работу концевого зажима 12, что позволяет обеспечить возможность управления оператором операции по рассечению/сшиванию.
Дистальный конец барабана с винтовым зубчатым колесом 80 включает дистальный приводной вал 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединяется с основным приводным валом 48 блока основного приводного вала. Таким образом, вращение двигателя 65 вызывает вращение группы основного приводного вала, что приводит в действие концевой зажим 12, как описано выше.
Кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, может включать опору 86, которая установлена в прорезь 88 кулисы 90. В кулисе 90 имеется отверстие 92 на противоположном конце 94, в которое вставляется шарнирный штифт 96, расположенный между деталями внешних сторон рукоятки 59 и 60. Шарнирный штифт 96 также проходит через отверстие 100 в спусковом устройстве 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может включать датчик обратного действия (или датчик окончания хода) 130 и датчик останова двигателя (или начала хода) 142. В различных вариантах осуществления датчик обратного действия 130 может являться концевым переключателем, расположенным на дистальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, контактирует с датчиком обратного действия 130 и включает его, когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80. При активации датчик обратного действия 130 направляет сигнал на двигатель 65 об изменении направления его вращения и, после рассечения, втягивании скальпеля 32 концевого зажима 12.
Датчик останова двигателя 142 может являться, например, нормально замкнутым концевым выключателем. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовым зубчатым колесом 80, при этом кольцо 84 переключает выключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80.
Когда во время работы оператор инструмента 10 оттягивает назад пусковое устройство 20, датчик 110 определяет введение в действие пускового устройства 20 и направляет сигнал к двигателю 65, активируя его вращение вправо, например, со скоростью, пропорциональной силе, с которой оператор оттягивает пусковое устройство 20. Вращение двигателя вправо 65, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце блока планетарных шестерней 72, тем самым активируя вращение барабана с винтовым зубчатым колесом 80 и продвижение в дистальном направлении кольца 84, навинченного на барабан с винтовым зубчатым колесом 80, вдоль барабана с винтовым зубчатым колесом 80. Вращение барабана с винтовым зубчатым колесом 80 также приводит в действие блок основного приводного вала, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом зажиме 12, то есть скальпель 32 и салазки 33 проходят вдоль канала 22, при этом рассекается ткань, захваченная концевым зажимом 12. Кроме того, в вариантах осуществления, где используется сшивающий концевой зажим 12, происходит сшивание ткани.
К тому моменту, как манипуляция концевого зажима 12 по рассечению/сшиванию ткани завершена, кольцо 84 на барабане с винтовым зубчатым колесом 80 достигает дистального конца барабана 80, вызывая включение обратного датчика двигателя 130, который направляет сигнал двигателю 65 об изменении направления вращения. Это, в свою очередь, вызывает втягивание скальпеля 32 и вынуждает кольцо 84 на барабане с винтовым зубчатым колесом 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовым зубчатым колесом 80.
Срединная часть рукоятки 104 включает тыльное плечо 106, которое зацепляется за кулису 90, что наилучшим образом показано на ФИГ. 8 и 9. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный со спусковым устройством 20. Движение кулисы 90 управляется вращением двигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки, в то время как кольцо 84 продвигается от проксимального кольца барабана с винтовым зубчатым колесом 80 к его дистальному кольцу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь притягивает пусковое устройство 20, оно сцепляется с ограничителем хода вперед 107 срединной части бранши 104, вызывая вращение серединной части бранши 104 против часовой стрелки. Однако вследствие сцепления тыльного плеча 106 с кулисой 90 срединная часть бранши 104 может вращаться против часовой стрелки настолько, насколько позволяет кулиса 90. Таким образом, если по каким-либо причинам необходимо остановить вращение двигателя 65, кулиса 90 остановит вращение и пользователь не сможет притягивать пусковое устройство 20 дальше, так как срединная часть бранши 104 не сможет вращаться против часовой стрелки вследствие удержания ее кулисой 90.
На ФИГ. 10A и 10B представлены два состояния параметрического датчика, который может использоваться в качестве датчика 110 работы двигателя в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может содержать лицевой участок 280, первый электрод (А) 282, второй электрод (В) 284 и сжимаемый диэлектрический материал 286 между электродами 282, 284, такой как, например, электроактивный полимер (ЭАП). Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала с пусковым устройством 20, когда он притянут. Соответственно, когда пусковое устройство 20 притянуто, диэлектрический материал 286 сжимается, как показано на ФИГ. 10 B, так, что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую соотносится с полным сопротивлением между электродами 282 и 284, то очевидно, что чем больше расстояние, тем больше полное сопротивление, и чем меньше расстояние, тем меньше полное сопротивление. Таким образом, величина, на которую сжимается диэлектрик 286 во время прижимания пускового устройства 20 (обозначена как сила F на ФИГ. 42), пропорциональна полному сопротивлению между электродами 282 и 284, что можно использовать для пропорционального управления двигателем 65.
Компоненты примера системы закрытия (или фиксации) упорного элемента 24 концевого зажима 12 путем притягивания закрывающего пускового устройства 18 также показаны на ФИГ. 7-10. В проиллюстрированном варианте осуществления система закрытия включает вилку сцепления 250, соединенную с закрывающим пусковым устройством 18 шарнирным штифтом 251, проходящим через ориентированные отверстия в закрывающем пусковом устройстве 18 и вилке сцепления 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающее спусковое устройство 18, проходит через другое отверстие в закрывающем спусковом устройстве 18, которое смещено относительно места, в котором штифт 251 проходит через закрывающее спусковое устройство 18. Таким образом, притягивание закрывающего пускового устройства 18 вызывает вращение против часовой стрелки верхней части закрывающего пускового устройства 18, к которому с помощью штифта 251 прикреплена вилка сцепления 250. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. ФИГ. 4), при этом продольное движение закрывающих кронштейнов 256 и 258 вызывает продольное перемещение проксимальной закрывающей трубки 40. Инструмент 10 также включает закрывающий стержень 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий стержень 260 может включать окно 261, в которое вставляется опора 263 на одной из деталей внешних сторон рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий стержень 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему стержню 260. Закрывающий стержень 260 может также включать дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. ФИГ. 4).
Во время работы, когда зажим 250 поворачивается вследствие притягивания закрывающего пускового устройства 18, закрывающие кронштейны 256 и 258 принуждают проксимальную закрывающую трубку 40 двигаться в дистальном направлении (т.е. в направлении от бранши инструмента 10), что вызывает движение в дистальном направлении дистальной закрывающей трубки 42 и вращение упорного элемента 24 вокруг оси шарнира 25 до фиксированного, или закрытого, положения. Когда закрывающее пусковое устройство 18 разблокировано, проксимальная закрывающая трубка 40 плавно передвигается в проксимальном направлении, что вызывает движение дистальной закрывающей трубки 42 в проксимальном направлении, и вследствие того, что петля 27 вставлена в отверстие 45 дистальной закрывающей трубки 42, вызывает поворот упорного элемента 24 вокруг оси шарнира 25 до открытого, или разблокированного, положения. Таким образом, притягивая и блокируя закрывающее пусковое устройство 18, оператор может зажимать ткань между упорной пластиной 24 и желобом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающее пусковое устройство 20 из закрытого положения.
На ФИГ. 11 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оператор начинает прижимать пусковое устройство 20 после фиксации закрывающего пускового устройства 18, активируется датчик 110, позволяя току проходить по цепи. Если в обычном состоянии открытый переключатель датчика обратного действия 130 открыт (что означает, что конец хода концевого зажима не был достигнут), ток будет протекать по направлению к однополюсному реле на два направления 132. Так как переключатель датчика обратного действия 130 не закрыт, индуктор 134 реле 132 не будет находиться под напряжением, то есть реле 132 будет оставаться в невозбужденном состоянии. В цепи также установлен датчик блокировки картриджа 136. Если в концевой зажим 12 вставлен картридж со скобками 34, датчик 136 будет находиться в закрытом состоянии, пропуская ток. И наоборот, если в концевой зажим 12 не вставлен картридж со скобками 34, датчик 136 будет открытым, тем самым препятствуя питанию двигателя 65 от батареи 64.
При вставленном картридже со скобками 34 датчик 136 закрыт, что позволяет подавать напряжение на однополюсное реле на одно направление 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через датчик 136 и датчик резистора переменного сопротивления 110 к двигателю 65 через двухполюсное реле на два направления 140, таким образом питая двигатель 65 и позволяя ему вращаться в прямом направлении.
Когда концевой зажим 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 134. Это приводит к тому, что реле 134 переходит в возбужденное состояние (не показано на ФИГ. 13), при этом ток течет не через датчик блокировки картриджа 136 и резистор переменного сопротивления 110, а проходит как к закрытому в обычном состоянии двухполюсному реле на два направления 142, так и к двигателю 65, но через реле 140, что вынуждает двигатель 65 поменять направление вращения.
Поскольку переключатель датчика останова двигателя 142 в обычном состоянии закрыт, ток пойдет назад к реле 134, обеспечивая его замыкание до тех пор, пока не откроется переключатель 142. Когда скальпель 32 полностью втянут, переключатель датчика останова двигателя 142 активируется и открывается, прекращая тем самым подачу питания на двигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 может использоваться двухпозиционный датчик. В таких вариантах осуществления скорость вращения двигателя 65 может не быть пропорциональной силе, приложенной оператором. Как правило, двигатель 65 может вращаться в целом с постоянной скоростью. Тем не менее оператор получает обратную связь относительно усилия, так как пусковое устройство 20 включено в цепь зубчатых передач привода.
На ФИГ. 12 представлен вид сбоку рукоятки 6 хирургического инструмента с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на ФИГ. 12, аналогичен варианту осуществления, представленному на ФИГ. 7-10, за исключением того, что вариант осуществления, представленный на ФИГ. 12, не имеет кулисы, соединенной с кольцом 84, навинченным на барабан с винтовым зубчатым колесом 80. Вместо этого в варианте осуществления, представленном на ФИГ. 12, кольцо 84 включает часть с датчиком 114, которая перемещается с кольцом 84, когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80. Часть с датчиком 114 включает выемку 116. Датчик обратного действия 130 может быть расположен на дистальном конце выемки 116, и датчик останова двигателя 142 может быть расположен на проксимальном конце выемки 116. Когда кольцо 84 продвигается вперед (и назад) по барабану с винтовым зубчатым колесом 80, часть с датчиком 114 продвигается вместе с ним. Кроме того, как показано на ФИГ. 12, срединная часть 104 может иметь плечо 118, которое входит в выемку 12.
Во время работы, когда оператор инструмента 10 прижимает пусковое устройство 20 к пистолетной рукоятке 26, датчик пуска двигателя 110 определяет движение и направляет сигнал к началу работы двигателю 65, что вызывает, помимо прочего, вращение барабана с винтовым зубчатым колесом 80. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Кроме того, при прижимании пускового устройства 20 срединная часть 104 вращается против часовой стрелки вместе с пусковым устройством 20 за счет ограничителя рабочего хода 107, который сцеплен с пусковым устройством 20. При вращении против часовой стрелки срединной части 104 плечо 118 вращается против часовой стрелки вместе с частью с датчиком 114 на кольце 84 таким образом, чтобы плечо 118 оставалось в выемке 116. Когда кольцо 84 достигает дистального конца барабана с винтовым зубчатым колесом 80, плечо 118 контактирует с датчиком обратного действия 130 и тем самым активирует его. Аналогичным образом, когда кольцо 84 достигает проксимального конца барабана с винтовым зубчатым колесом 80, плечо контактирует с датчиком останова двигателя 142 и активирует его. Такими действиями можно изменить направление движения двигателя 65 и остановить его, в соответствии с описанием выше.
На ФИГ. 13 представлен вид сбоку бранши 6 с усиленным автоматическим эндокатером согласно другому варианту осуществления. Вариант осуществления, представленный на ФИГ. 13, аналогичен варианту осуществления, представленному на ФИГ. 7-10, за исключением того, что в варианте осуществления, представленном на ФИГ. 13, кулиса 90 не имеет прорези. Вместо этого кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, имеет вертикальный канал 126. Вместо прорези кулиса 90 имеет опору 128, которая расположена в канале 126. Когда барабан с винтовым зубчатым колесом 80 вращается, кольцо 84, навинченное на барабан с винтовым зубчатым колесом 80, продвигается в прямом направлении (или в обратном, в зависимости от направления вращения). Когда кольцо 84 продвигается, кулиса 90, вследствие наличия опоры 128, расположенной в желобе 126, вращается против часовой стрелки, как показано на ФИГ. 13.
Как было указано выше, при использовании двухтактного автоматического инструмента оператор сначала притягивает и блокирует закрывающее спусковое устройство 18. На ФИГ. 14 и 15 показан один вариант осуществления способа блокировки закрывающего пускового устройства 18 на пистолетной рукоятке 26 рукоятки 6. В данном варианте осуществления пистолетная рукоятка 26 имеет крюк 150, выполненный с возможностью вращения против часовой стрелки вокруг шарнира 151 под действием торсионной пружины 152. Закрывающее спусковое устройство 18 также включает запирающую пластину 154. Когда оператор притягивает закрывающее пусковое устройство 18, запирающая пластина 154 зацепляется за скошенную часть 156 крюка 150, поворачивая тем самым крюк 150 вверх (или по часовой стрелке, как показано на ФИГ. 14-15) до тех пор, пока запирающая пластина 154 полностью не пройдет скошенную часть 156 и не встанет в утопленную выемку 158 крюка 150, фиксируя положение закрывающего пускового устройства 18. Оператор может разблокировать закрывающее спусковое устройство 18, сдвигая вниз скользящую спусковую кнопку 160 на задней или противоположной стороне пистолетной рукоятки 26. При сдвигании вниз скользящей пусковой кнопки 160 крюк 150 поворачивается по часовой стрелке, высвобождая запирающую пластину 154 из утопленной выемки 158.
На ФИГ. 16 показан другой механизм фиксации закрывающего пускового устройства в соответствии с различными вариантами осуществления. В варианте осуществления, представленном на ФИГ. 16, закрывающее пусковое устройство 18 включает клин 160, имеющий стреловидную часть 161, которая выполнена с возможностью опускания вниз (или в направлении по часовой стрелке) под действием пластинчатой пружины 162. Клин 160 и пластинчатая пружина 162 могут быть выполнены, например, из формованного пластика. Когда закрывающее спусковое устройство 18 притянуто, стреловидная часть 161 вставлена в отверстие 164 в пистолетной рукоятке 26 рукоятки 6. Нижняя скошенная поверхность 166 стреловидной части 161 зацепляется за нижнюю боковую стенку 168 отверстия 164, принуждая стреловидную часть 161 поворачиваться против часовой стрелки. В результате этого нижняя скошенная поверхность 166 полностью заходит за нижнюю боковую стенку 168, сила, поворачивающая стреловидную часть 161 против часовой стрелки, прекращает воздействие на нее, при этом нижняя боковая стенка 168 фиксирует стреловидную часть 161 в закрытом положении, зацепляясь за выемку 170.
Для разблокирования закрывающего пускового устройства 18 пользователю нужно надавить на кнопку 172 на противоположной стороне закрывающего пускового устройства 18, вынуждая стреловидную часть 161 повернуться против часовой стрелки и позволяя стреловидной части 161 выйти из отверстия 164.
На ФИГ. 17-22 показан механизм фиксации закрывающего пускового устройства в соответствии с другим вариантом осуществления. Как показано в этом варианте осуществления, закрывающее пусковое устройство 18 включает гибкое продольное плечо 176, имеющее выступающий боковой шип 178. Плечо 176 и шип 178 могут быть выполнены, например, из формованного пластика. Пистолетная рукоятка 26 ручки 6 имеет отверстие 180 с расположенным внутри него латерально расширяющимся клином 182. Когда закрывающее пусковое устройство 18 втянуто, штифт 178 зацепляется за клин 182, затем штифт 178 продвигается нижней поверхностью 184 клина 182 вниз (то есть плечо 176 поворачивается по часовой стрелке), как показано на ФИГ. 17 и 18. Когда штифт 178 полностью заходит за нижнюю поверхность 184, воздействие, вынуждающее плечо 176 двигаться по часовой стрелке, прекращается, и штифт 178 поворачивается против часовой стрелки, при этом штифт 178 останавливается в выемке 186 за клином 182, как показано на ФИГ. 19, фиксируя закрывающее пусковое устройство 18. Штифт 178 удерживается на месте в закрытом положении гибким ограничителем 188, выступающим из клина 184.
Чтобы разблокировать закрывающее спусковое устройство 18, оператор может дополнительно надавить на закрывающее спусковое устройство 18, чтобы штифт 178 продвинулся до наклонной задней стенки 190 отверстия 180, при этом штифт 178 вынужденно продвигается по направлению вверх мимо гибкого ограничителя 188, как показано на ФИГ. 20 и 21. Затем штифт 178 свободно выходит через верхний канал 192 отверстия 180, при этом закрывающее спусковое устройство 18 перестает фиксироваться на пистолетной рукоятке 26, как показано на ФИГ. 22.
На ФИГ. 23A-B показан универсальный шарнир (u-образный шарнир) 195. Вторая деталь 195-2 u-образного шарнира 195 вращается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На ФИГ. 23A показан u-образный шарнир 195 в линейном (180°) расположении, на ФИГ. 23B показан u-образный шарнир 195 в расположении приблизительно на 150°. U-образный шарнир 195 может быть использован вместо конических зубчатых колес 52 a-c (см. для примера ФИГ. 4) в шарнирном сочленении 14 блока основного приводного вала для подвижного присоединения концевого зажима 12. На ФИГ. 24A-B показан кабель кручения 197, который может быть использован как вместо конических зубчатых колес 52a-c, так и вместо u-образного шарнира 195 для подвижного присоединения концевого зажима 12.
На ФИГ. 25-31 представлен другой вариант осуществления двухходового режущего и сшивающего хирургического инструмента 10, приводимого в действие с помощью электродвигателя, с усилением в соответствии с другим вариантом осуществления настоящего изобретения. Вариант осуществления, представленный на ФИГ. 25-31, аналогичен варианту, представленному на ФИГ. 6-10, за исключением того, что вместо барабана с винтовым зубчатым колесом 80 вариант осуществления, представленный на ФИГ. 23-28, включает альтернативную группу зубчатой передачи. Вариант осуществления, представленный на ФИГ. 25-31, включает блок редуктора 200, включающий несколько зубчатых передач, расположенных в рамке 201, при этом зубчатые передачи располагаются между планетарной шестерней 72 и ведущей шестерней 124 на проксимальном конце приводного вала 48. Как описано ниже, блок редуктора 200 обеспечивает обратную связь с пользователем через спусковое устройство 20, информируя о приведении в рабочее положение и силе нагрузки концевого зажима 12. Также пользователь может приложить силу к системе через блок редуктора 200, обеспечивая приведение концевого зажима 12 в рабочее положение. В этом отношении, аналогично описанным выше вариантам осуществления, вариант осуществления, представленный на ФИГ. 23-32, описывает другой автоматический инструмент с усилителем 10, который дает обратную связь пользователю относительно силы нагрузки, приложенной к инструменту.
В показанном на иллюстрации варианте осуществления изобретения спусковое устройство 20 включает две части: основную часть корпуса 202 и жесткую часть 204. Основная часть 202 может быть выполнена, например, из пластика, а жесткая часть 204 может быть выполнена из более твердого материала, например, металла. В описанном варианте осуществления жесткая часть 204 примыкает к основной части 202, однако в соответствии с другими вариантами осуществления жесткая часть 204 может быть помещена внутрь основной части 202. Шарнирный штифт 207 может проходить через отверстия в частях 202 и 204 спускового устройства и являться точкой, вокруг которой вращается спусковое устройство 20. Кроме того, пружина 222 может оказывать давление на пусковое устройство 20, вынуждая его вращаться в направлении против часовой стрелки. Дистальный конец пружины 222 может быть связан с штифтом 224, который связан с частями 202 и 204 спускового устройства 20. Проксимальный конец пружины 222 может быть связан с одной из деталей внешней нижней стороны 59 и 60 рукоятки.
В показанном на фигуре варианте осуществления и главная часть корпуса 202, и жесткая часть 204 включают передающие части 206, 208 (соответственно) в верхней концевой части. Передающие части 206 и 208 зацепляют передачу редуктора в сборе 200, как описано ниже, приводя в движение группу основного приводного вала и обеспечивая пользователям обратную связь относительно приведения концевого зажима 12 в рабочее положение.
Редуктор в сборе 200 может включать, как показано в представленном варианте осуществления, 6 (шесть) зубчатых колес. Первое зубчатое колесо 210 блока редуктора 200 зацепляет передающие части 206 и 208 спускового устройства 20. Кроме того, первое зубчатое колесо 210 сцепляется с меньшим по размеру вторым зубчатым колесом 212, меньшее второе зубчатое колесо 212 расположено соосно с большим третьим зубчатым колесом 214. Третье зубчатое колесо 214 сцепляется с меньшим четвертым зубчатым колесом 216, которое расположено соосно с пятым зубчатым колесом 218. Пятое зубчатое колесо 218 является коническим зубчатым колесом, расположенным под 90°, которое сцепляется с сопряженным коническим зубчатым колесом 220, расположенным под 90° (наиболее точно показано на ФИГ. 31), связанным с ведущей шестерней 124, приводящей в действие основной приводной вал 48.
В процессе работы, когда пользователь прижимает пусковое устройство 20, датчик запуска двигателя (не показан) активируется, направляя сигнал двигателю 65 к вращению со скоростью, пропорциональной усилию или силе, с которой оператор притягивает пусковое устройство 20, что заставляет двигатель 65 вращаться со скоростью, пропорциональной сигналу от датчика. В данном варианте осуществления датчик не показан, однако он может быть подобен датчику пуска двигателя 110, описанному выше. Датчик может быть расположен в бранше 6 таким образом, чтобы он подвергался нажатию при притягивании пускового устройства 20. Также вместо пропорционального датчика может использоваться двухпозиционный датчик.
Вращение двигателя 65 вызывает вращение конических зубчатых колес 68 и 70, что, в свою очередь, вызывает вращение планетарной шестерни 72 и - через приводной вал 76 - вращение кольцевого зубчатого колеса 122. Кольцевое зубчатое колесо 122 зацепляет ведущую шестерню 124, которая соединена с основным приводным валом 48. Таким образом, вращение ведущей шестерни 124 приводит в действие основной приводной вал 48, что инициирует операцию по рассечению/сшиванию концевым зажимом 12.
Вращение ведущей шестерни 124 в прямом направлении, в свою очередь, вызывает вращение конического зубчатого колеса 220, что при неподвижных зубчатых передачах редуктора в сборе 200 вызывает вращение первого зубчатого колеса 210. Первая передача 210 зацепляет передающие части 206 и 208 пускового устройства 20, вызывая вращение пускового механизма 20 против часовой стрелки, когда двигатель 65 продвигает концевой зажим 12 вперед (и вращение против часовой стрелки, когда двигатель 65 вращается в обратном направлении, втягивая концевой зажим 12). Таким образом, пользователь получает обратную связь относительно силы нагрузки и приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, связанное с силой нагрузки, приложенной к концевому зажиму 12. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после выполнения манипуляции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит вращение пускового устройства 20 по часовой стрелке и которая, как правило, пропорциональна скорости вращения двигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. То есть при притягивании пускового устройства 20 передающие части 206 и 208 вращаются против часовой стрелки, что заставляет зубчатые передачи блока редуктора 200 вращаться, тем самым вызывая вращение ведущей шестерни 124 и основного приводного вала 48.
На ФИГ. 25-31 это не показано, однако инструмент 10 может дополнительно включать датчик обратного движения двигателя и датчик останова двигателя. Как описано выше, датчик обратного действия двигателя и датчик остановки двигателя могут определять, соответственно, завершение режущего хода (полное введение скальпеля 32) и завершение действия втягивания (полное втягивание скальпеля 32). Схема, аналогичная описанной выше и приведенной на ФИГ. 11, может использоваться для соответствующего питания двигателя 65.
На ФИГ. 32-36 изображен автоматический двухтактный режущий и сшивающий хирургический инструмент 10 с усилителем в соответствии с еще одним вариантом осуществления. Вариант осуществления, представленный на ФИГ. 32-36, аналогичен варианту, представленному на ФИГ. 25-31, за исключением того, что в варианте осуществления, представленном на ФИГ. 32-36, спусковое устройство 20 включает нижнюю часть 228 и верхнюю часть 230. Обе части 228 и 230 связаны между собой и вращаются вокруг шарнирного штифта 207, который проходит через каждую часть 228 и 230. Верхняя часть 230 включает передающую часть 232, которая зацепляется за первое зубчатое колесо 210 блока редуктора 200. Пружина 222 связана с верхней частью 230 и воздействует на нее таким образом, чтобы верхняя часть поворачивалась по часовой стрелке. Верхняя часть 230 может также включать в себя нижнее плечо 234, которое связано с верхней поверхностью нижней части 228 пускового устройства 20, при этом, когда верхняя часть 230 вращается по часовой стрелке, нижняя часть 228 также вращается по часовой стрелке, и когда нижняя часть 228 вращается против часовой стрелки, верхняя часть 230 также вращается против часовой стрелки. Кроме того, нижняя часть 228 включает в себя ограничитель вращения 238, который зацепляется за плечо верхней части 230. Таким образом, когда верхняя часть 230 начинает вращаться против часовой стрелки, нижняя часть 228 также вращается против часовой стрелки, и когда нижняя часть 228 вращается по часовой стрелке, верхняя часть 230 также вращается по часовой стрелке.
Данный вариант осуществления также включает датчик запуска двигателя 110, который направляет сигнал к двигателю 65, что в различных вариантах осуществления может вызывать вращение двигателя 65 со скоростью, пропорциональной силе, приложенной оператором при притягивании спускового устройства 20. Датчик 110 может являться, например, реостатом или иным датчиком переменного сопротивления, как описано в настоящем документе. Кроме того, инструмент 10 может включать в себя датчик обратного действия 130, который задействуется или переключается в случае контакта с фронтальной поверхностью 242 верхней части 230 пускового устройства 20. После приведения в действие датчик обратного действия 130 направляет сигнал двигателю 65 об изменении направления вращения. Кроме того, инструмент 10 может включать датчик останова двигателя 142, который задействуется или срабатывает в случае контакта с нижней частью 228 спускового устройства 20. После приведения в действие датчик останова двигателя 142 направляет сигнал двигателю 65 о прекращении вращения в обратном направлении.
Во время операции, когда оператор втягивает закрывающее спусковое устройство 18 в зафиксированное положение, пусковой механизм 20 немного втягивается (с помощью механизмов, общеизвестных в отрасли, в том числе описанных в Патенте США № 6,978,921 изобретателей Фредерика Шелтона, IV и соавторов и в Патенте США № 6,905,057 изобретателей Джефри С. Суэйза и соавторов, которые включены) так, что пользователь может захватить пусковой механизм 20 и начать операцию по рассечению/сшиванию, как показано на ФИГ. 32 и 33. В этот момент, как показано на ФИГ. 33, передаточная часть 232 верхней части 230 спускового устройства 20 приходит в зацепление с первым зубчатым колесом 210 блока редуктора 200. Когда оператор притягивает спусковое устройство 20, в соответствии с различными вариантами осуществления, спусковое устройство 20 может немного повернуться, например, на пять градусов, прежде чем сдвинуть датчик запуска двигателя 110, как показано на ФИГ. 34. Активация датчика 110 вызывает вращение двигателя 65 в прямом направлении со скоростью, пропорциональной силе, которую прикладывает оператор. Вращение двигателя 65 в прямом направлении вызывает, как описано выше, вращение основного приводного вала 48, что, в свою очередь, инициирует процесс приведения в рабочее положение скальпеля 32 в концевом зажиме 12 (то есть скальпель начинает проходить в желоб 22). Вращение ведущей шестерни 124, которая связана с основным приводным валом 48, вызывает вращение зубчатых колес 210 и 220 в редукторе в сборе 200. Так как первое зубчатое колесо 210 сцепляется с частью зубчатого колеса 232 в верхней части 230 пускового устройства 20, верхняя часть 232 вращается против часовой стрелки, что вызывает вращение против часовой стрелки нижней части 228.
Когда скальпель 32 находится в полностью рабочем положении (то есть находится в конце хода рассечения), фронтальная поверхность 242 верхней части 230 активирует датчик обратного движения двигателя 130, который направляет сигнал двигателю 65 об изменении направления движения на противоположное. Это вызывает изменение направления вращения блока основного приводного вала и втягивание скальпеля 32. Вращение блока основного приводного вала в обратном направлении вызывает изменение направления вращения зубчатых колес 210 и 220 в блоке редуктора, что вызывает вращение по часовой стрелке верхней части 230 пускового устройства 20 и вращение по часовой стрелке нижней части 228 пускового устройства 20 до тех пор, пока нижняя часть 228 не сдвинет или активирует датчик останова двигателя 142, когда скальпель 32 полностью втянут, что вызывает остановку двигателя 65. Таким образом, пользователь получает обратную связь относительно приведения концевого зажима 12 в рабочее положение при нажатии на спусковое устройство 20. Так, когда пользователь притягивает спусковое устройство 20, он испытывает сопротивление, соотносимое с приведением концевого зажима 12 в рабочее положение и в частности с силой нагрузки, приложенной к скальпелю 32. Аналогичным образом, когда оператор отпускает пусковое устройство 20 после выполнения манипуляции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит вращение пускового устройства 20 по часовой стрелке и которая, как правило, пропорциональна скорости вращения двигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе двигателя 65), чтобы привести в действие блок основного приводного вала (и, следовательно, концевой зажим 12 во время операции по рассечению/сшиванию), притягивая спусковое устройство 20. То есть при притягивании пускового устройства 20 передающая часть 232 в верхней части 230 вращается против часовой стрелки, что заставляет зубчатые передачи блока редуктора 200 вращаться, тем самым вызывая вращение ведущей шестерни 124 и блока основного приводного вала.
В описанных выше вариантах осуществления используются системы обратной связи с усилением с или без адаптивного управления (например, использование датчиков 110, 130 и 142 за пределами замкнутой системы двигателя 65, цепи зубчатых передач привода и концевого зажима 12) для автоматического двухтактного режущего и сшивающего хирургического инструмента. То есть сила, приложенная пользователем для притягивания спускового устройства 20, может являться дополнением к силе, приложенной двигателем 65, вследствие того, что спусковое устройство 20 включено (напрямую или опосредованно) в цепь зубчатых передач привода между двигателем 65 и основным приводным валом 48. В других вариантах осуществления настоящего изобретения пользователю может быть предоставлена тактильная обратная связь относительно положения скальпеля 32 в концевом зажиме, но при этом пусковой механизм 20 в цепи зубчатых передач привода будет отсутствовать. На ФИГ. 37-40 показан автоматический режущий и сшивающий хирургический инструмент с такой системой тактильной позиционной обратной связи.
В показанном на ФИГ. 37-40 варианте осуществления спусковое устройство 20 может иметь нижнюю часть 228 и верхнюю часть 230, по аналогии с инструментом 10, показанным на ФИГ. 32-36. Однако в отличие от варианта осуществления, изображенного на ФИГ. 32-36, верхняя часть 230 не имеет передаточной части, которая сопрягается с частью цепи зубчатых передач привода. Вместо этого инструмент включает второй двигатель 265 с ввинченным в него резьбовым стержнем 266. В то время как двигатель 265 вращается, резьбовой стержень 266 совершает продольные возвратно-поступательные движения в или из двигателя 265, в зависимости от направления вращения. Инструмент 10 также имеет датчик положения 268, который реагирует на вращение основного приводного вала 48, преобразовывая инкрементное вращательное движение основного приводного вала 48 (или другого компонента основной приводной группы), например, в соответствующие серии цифровых сигналов. В изображенном варианте осуществления ведущая шестерня 124 включает проксимальный приводной вал 270, который соединен с датчиком положения 268.
Инструмент 10 также включает систему управления (не показана), которая может быть реализована с помощью микроконтроллера или иной интегральной схемы, принимающей цифровые сигналы от датчика положения 268. На базе сигналов от датчика положения 268 схема управления может определять степень наложения скальпеля 32 в концевом зажиме 12. То есть схема управления может определять, находится ли скальпель 32 в полностью рабочем, полностью втянутом или промежуточном положении. Определив рабочее положение концевого зажима 12, система управления может направить сигнал второму двигателю 265, управляя его вращением и, таким образом, возвратно-поступательными движениями резьбового стержня 266.
В процессе работы, как показано на ФИГ. 37, когда закрывающее спусковое устройство 18 не заблокировано в прижатом положении, спусковое устройство 20 поворачивается от пистолетной рукоятки 26 рукоятки 6, при этом фронтальная поверхность 242 верхней части 230 спускового устройства 20 не соприкасается с проксимальным концом резьбового стержня 266. Когда оператор притягивает закрывающее пусковое устройство 18 и блокирует его в закрытом положении, пусковое устройство 20 несколько поворачивается в направлении закрывающего пускового устройства 20, при этом оператор может зажать пусковое устройство 20, как показано на ФИГ. 38. В этом положении фронтальная поверхность 242 верхней части 230 контактирует с проксимальным концом резьбового стержня 266.
Как только пользователь далее втягивает пусковой механизм после исходной величины вращения (например, поворот на 5 градусов), датчик 110 работы двигателя может быть активирован таким образом, что, как объяснено выше, датчик 110 посылает сигнал двигателю 65, чтобы вызвать его вращение со скоростью движения вперед, пропорциональной величине силы втягивания, прилагаемой оператором к пусковому механизму 20. Вращение двигателя 65 в прямом направлении через цепь зубчатых передач привода вызывает вращение основного приводного вала 48, что вынуждает скальпель 32 и салазки 33 спускаться вниз по каналу 22 и рассекать ткань, захваченную концевым зажимом 12. Система управления получает выходные сигналы с датчика положения 268 относительно инкрементного вращения блока основного приводного вала и направляет сигнал второму двигателю 265, вызывая его вращение, в результате чего резьбовой стержень 266 втягивается в двигатель 265. Это вызывает вращение против часовой стрелки верхней части 230 пускового устройства 20, что вызывает вращение также против часовой стрелки нижней части 228 пускового механизма. Таким образом, поскольку возвратно-поступательное движение резьбового стержня 266 связано с вращением блока основного приводного вала, оператор инструмента 10, прижимая спусковое устройство 20, получает тактильную обратную связь о положении концевого зажима 12. Однако сила притягивания, которую прикладывает оператор, не влияет напрямую на движение блока основного приводного вала, так как в данном варианте осуществления спусковое устройство 20 не является частью цепи зубчатых передач привода.
Контролируя инкрементное вращение группы основного приводного вала по выходным сигналам датчика положения 268, система управления может определять, когда скальпель 32 находится в полностью рабочем положении (то есть полностью выдвинут). В этот момент система управления может направить сигнал двигателю 65 об изменении направления для втягивания скальпеля 32. Вращения двигателя 65 в обратном направлении вызывает изменение направления вращения блока основного приводного вала, что определяется датчиком положения 268. На базе сигнала датчика положения 268 о вращении в обратном направлении система управления направляет сигнал второму двигателю 265, вынуждая его изменить направление вращения на противоположное, при этом резьбовой стержень 266 начинает выдвигаться в продольном направлении из двигателя 265. Это движение вынуждает верхнюю часть 230 пускового устройства 20 поворачиваться по часовой стрелке, что вызывает вращение по часовой стрелке нижней части 228. Таким образом, оператор может почувствовать силу движения по часовой стрелке пускового устройства 20, что обеспечивает оператору обратную связь о том, в каком состоянии находится скальпель 32 в концевом зажиме 12. Система управления может определить, когда скальпель 32 находится в полностью втянутом положении. В этот момент система управления может направить сигнал двигателю 65 для остановки вращения.
В соответствии с другими вариантами осуществления, вместо системы управления, определяющей положение скальпеля 32, могут быть использованы датчик обратного движения двигателя и датчик останова двигателя, как описано выше. Кроме того, вместо пропорционального датчика 110 для управления вращением двигателя 65 может использоваться двухпозиционный датчик. В таком варианте осуществления оператор не может контролировать скорость вращения двигателя 65, однако двигатель может вращаться с предварительно определенной скоростью.
На ФИГ. 41-43 представлен возможный вариант осуществления эндоскопического рассекателя, приводимого в действие механическим путем, а в частности, его рукоятка 6, ствол 8 и концевой зажим. Более подробную информацию об эндоскопическом рассекателе, приводимом в действие механическим путем, можно найти в Патенте США № 11/052,632, озаглавленном «Хирургический сшивающий инструмент с много-ходовым механизмом сшивания/резания с автоматическим завершением пути втягивания сшивания/резания», который включен в настоящую заявку путем отсылки. Как показано на ФИГ. 41, концевой зажим 12 отвечает на закрывающее движение рукоятки 6 (на ФИГ. 41 не показана) сначала путем включения торцевой поверхности упорного элемента 1002, связанной с проксимальным концом упорного элемента 1004, имеющим латерально выступающие шарнирные штифты упорного элемента 25, которые расположены проксимально по отношению к вертикально выступающему язычку упорного элемента 27. Шарнирные штифты упорного элемента 25 сдвигаются внутри серпообразных отверстий 1006 в канале для скобок 22, открывая и закрывая упорный элемент 24 относительно канала 22. Язычок 27 сцепляется с изогнутой петлей 1007, выступающей вовнутрь в отверстии петли 45 на дистальном конце 1008 закрывающей трубки 1005, которая заканчивается дистальным краем 1008, накладывающимся на торцевую поверхность 1002. Таким образом, когда закрывающая трубка 1005 двигается в проксимальном направлении из открытого положения, изогнутая петля 1007 закрывающей трубки 1005 тянет язычок упорного элемента 27 в проксимальном направлении. Шарнирные штифты упорного элемента 25 продвигаются по серпообразным отверстиям 1006 канала для скобок 22, одновременно сдвигая упорный элемент 24 в проксимальном направлении и поворачивая вверх в открытое положение. Когда закрывающая трубка 1005 двигается в дистальном направлении, изогнутая петля 1007 в отверстии петли 45 высвобождает петлю 27 упорного элемента, и дистальный конец 1008 толкает торцевую поверхность 1002, закрывая упорный элемент 24.
Представленные на ФИГ. 41 ствол 8 и концевой зажим 12 также включают компоненты, реагирующие на приводное движение выталкивающего стержня 1010. В частности, выталкивающий стержень 1010 зацепляет с возможностью вращения выталкивающий кюветообразный элемент 1012 с продольной выемкой 1014. Выталкивающий кюветообразный элемент 1012 перемещается в продольном направлении в пределах рамки 1016 в ответ на продольное движение выталкивающего стержня 1010. Продольная прорезь 1018 в закрывающей трубке 1005 выполнена с возможностью соединения с правой или левой деталями внешней стороны 61 и 62 рукоятки 6 (на ФИГ. 41 не показана). Длина продольной прорези 1018 в закрывающей трубке 1005 достаточна, чтобы допустить относительное продольное движение частей бранши 61 и 62 для выполнения выталкивающего и закрывающего движений, соответственно, с присоединением частей бранши 61 и 62, проходящих через продольную прорезь 1020 в корпус 1016, чтобы плавно зацепить продольное углубление 1014 в кюветообразной детали корпуса 1012.
Дистальный конец корпуса посредством элемента 1012 присоединяется к проксимальному концу стержня пускового механизма 1022, который перемещается внутри корпуса 1016, а точнее в пределах его направляющей 1024, чтобы дистально проецировать скальпель 32 в концевой зажим 12. Концевой зажим 12 включает в себя картридж со скобками 34, который приводится в действие скальпелем 32. Картридж со скобками 34 имеет каретку 1028, которая удерживает корпус 1030 картриджа со скобками, a клинообразный направляющий привод 33, направляющие скобок 1034 и скобки 1036. Необходимо понимать, что клиновидный движущий механизм салазок 33 перемещается в продольном направлении в пределах выталкивающей выемки (не показана), расположенной между лотком картриджа 1028 и корпусом картриджа 1030. Клиновидный движущий механизм салазок 33 имеет кулачковые поверхности, контактирующие и поднимающие движущие механизмы скобок 1034 вверх, продвигая скобки 1036. Корпус картриджа со скобками 1030 дополнительно включает проксимально открытый вертикальный паз 1031 для прохождения скальпеля 32. В частности, вдоль дистального конца скальпеля 32 предусмотрена режущая поверхность 1027 для рассечения ткани после скрепления скобками.
Необходимо отметить, что ствол 8, показанный на ФИГ. 4, не предусматривает возможности шарнирного сочленения. Тем не менее, применения настоящего изобретения могут включать инструменты, способные к шарнирному направлению, например, такие, как показаны выше со ссылкой на ФИГ. 1-4 и описанные в следующих Патентах США и заявках на патент, которые включены в настоящее описание путем отсылки: (1) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ШАРНИРНЫМ МЕХАНИЗМОМ, ВРАЩАЮЩИМСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ», опубликованная патентная заявка США № 2005/0006434, изобретатели: Фредерик Э. Шелтон IV, Брайан Дж. Хеммелгарн, Джефри С. Суэйз, Кеннет С. Уэйлс, от 9 июля. 2003; (2) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ШАРНИРНЫМ СОЕДИНЕНИЕМ ДЛЯ НАПРАВЛЯЮЩЕЙ СТЕРЖНЯ СШИВАНИЯ/РЕЗАНИЯ», Патент США № 6,786,382, изобретатель: Брайана Дж. Хеммелгарна; (3) «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С КОНТРОЛЕМ ШАРНИРНОГО ДВИЖЕНИЯ В БОКОВОМ НАПРАВЛЕНИИ», Патент США № 6,981,628, изобретатель: Джефри С. Суэйз; (4) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С КОНИЧЕСКИМ СТЕРЖНЕМ СШИВАНИЯ/РЕЗАНИЯ ДЛЯ ПОВЕШЕННОЙ ГИБКОСТЬЮ ВОКРУГ ШАРНИРНОГО СОЕДИНЕНИЯ», Патент США № 6,964,363, изобретатели: Фредерик Э. Шелтон IV, Майкл Сетсер, Брюс Уайзенбург II; и (5) «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ОПОРНЫМИ ПЛАСТИНАМИ ШАРНИРНОГО СОЕДИНЕНИЯ ДЛЯ ПОДДЕРЖКИ СТЕРЖНЯ СШИВАНИЯ/РЕЗАНИЯ», опубликованная патентная заявка США № 2005/0006431, изобретатели: Джефри С. Суэйз, Джозеф Чарлз Хьюэйл, от 9 июля 2003 г.
На ФИГ. 42-43 представлен вариант осуществления рукоятки 6, выполненной с возможностью использования в эндокатере с механическим приводом, совместно с вариантом осуществления ствола 8 и концевого зажима 12, как показано на ФИГ. 41. Очевидно, что для механического закрывания и приведения в действие концевого зажима 12 можно использовать рукоятку любой подходящей конструкции. На ФИГ. 42-43 показано, что рукоятка 6 сшивающего и рассекающего хирургического инструмента 10 включает в себя сочлененный пусковой механизм со сцепленной передачей 1060, обеспечивающий такие характеристики, как повышенная прочность, уменьшенный размер рукоятки, минимальная компоновка и т.д.
Притяжение закрывающего пускового устройства 18 к пистолетной рукоятке 26 рукоятки 6 инициирует закрытие концевого зажима 12 (не показан на ФИГ. 42-43). Закрывающий спусковой механизм 18 поворачивается вокруг оси поворота 252 закрывания, которая соединена с правой и левой внешними нижними боковыми частями 59, 60 рукоятки 6, что вызывает движение верхней части 1094 закрывающего спускового устройства 18 вперед. Импульс закрытия передается на закрывающую трубку 1005 через замыкающую вилку сцепления 250, которая соединяется с закрывающим соединительным элементом 1042 и верхней частью 1094 закрывающего пускового устройства 18 при помощи штифта замыкающей вилки сцепления 1044 и штифта закрывающего соединительного элемента 1046, соответственно.
В полностью открытом положении, как показано на ФИГ. 42, верхняя часть 1094 закрывающего пускового устройства 18 захватывает и удерживает запорный рычаг 1048 шарнирной пусковой кнопки закрытия 30 в показанном положении. Когда закрывающее пусковое устройство 18 оказывается полностью нажатым, закрывающее пусковое устройство 18 освобождает запорный рычаг 1048, и прилегающая поверхность 1050 поворачивается и сцепляется с дистальной выемкой справа 1052 шарнирного запорного рычага 1048, удерживая закрывающее пусковое устройство 18 в зажатом, или закрытом, положении. Проксимальный конец запорного рычага 1048 вращается вокруг бокового шарнирного соединения 1054 с деталями 59 и 60, воздействуя на пусковую кнопку закрытия 30. Промежуточная дистальная сторона 1056 пусковой кнопки закрытия 30 прижимается в проксимальном направлении под действием пружины 1058, зажатой между корпусом 1040 и пусковой кнопкой закрытия 30. В результате этого пусковая кнопка закрытия 30 воздействует на запорный рычаг 1048, смещая его против часовой стрелки (если смотреть слева), при этом он сцепляется с прилегающей поверхностью 1050 закрывающего пускового устройства 18, что, в свою очередь, препятствует освобождению закрывающего пускового устройства 18, когда пусковой механизм со сцепленной передачей 1040 находится в выдвинутом положении.
Когда закрывающее пусковое устройство 18 находится в полностью втянутом и нажатом положении, пусковое устройство 20 разблокируется и в настоящем варианте осуществления может многократно прижиматься к пистолетной рукоятке 26, приводя в действие концевой зажим 12. Как показано на фигуре, пусковой механизм со сцепленной передачей 1060 изначально находится во втянутом положении, в котором он удерживается при помощи комбинированной пружины натяжения/сжатия 1062, сжимаемой пистолетной рукояткой 26 рукоятки 6, неподвижный конец 1063 которой прикреплен к деталям 59 и 60, а ее подвижный конец 1064 прикреплен к загнутому вниз проксимальному втянутому концу 1067 стальной ленты 1066.
Дистально расположенный конец 1068 стальной ленты 1066 прикреплен к шарнирной муфте 1070, выдерживающей конструкционную нагрузку. Муфта, в свою очередь, соединяется с передним соединительным элементом 1072а из множества соединительных элементов 1072a-1072d, образующих соединительную рейку 1074. Соединительная рейка 1074 является гибкой, однако имеет дистальные соединительные элементы, образующие блок прямой жесткой рейки, которая способна передавать значительное ударное усилие посредством выталкивающего стержня 1010 в стволе 6, втянутого в пистолетную рукоятку 26, что позволяет уменьшить осевую длину рукоятки 6. Очевидно, что наличие комбинированной пружины натяжения/сжатия 1062 по сравнению с одиночной пружиной позволяет усилить ударное движение и при этом по существу вдвое сократить минимальную длину.
Пусковое устройство 20 вращается вокруг штифта пускового устройства 96, соединенного с деталями рукоятки 59 и 60. По мере того как пусковое устройство 20 прижимается к пистолетной рукоятке 26, растягивая проксимально расположенную пружину натяжения пускового механизма 222, сцепленную проксимально между верхней частью 228 пускового устройства 20 и деталями 59 и 60, верхняя часть 228 пускового устройства 20 перемещается в дистальном направлении вокруг штифта пускового устройства 96. Верхняя часть 228 пускового устройства 20 сцепляется с соединительной рейкой 1074 во время каждого нажатия на рукоятку пускового устройства при помощи тягового смещающего механизма 1078, который расцепляется при отпускании пускового устройства 20. Пружина натяжения пускового устройства 222 при отпускании толкает пусковое устройство 20 в дистальном направлении и расцепляет тяговый смещающий механизм 1078.
При приведении в действие пускового механизма со сцепленной передачей 1040 промежуточное зубчатое колесо 1080 поворачивается по часовой стрелке (если смотреть слева), сцепляясь с зубчатой передней поверхностью 1082 соединительной рейки 1074. Вращение сообщается механизму передачи к индикатору 1084, который таким образом поворачивается против часовой стрелки в ответ на движение промежуточного зубчатого колеса 1080. Как промежуточное зубчатое колесо 1080, так и механизм передачи к индикатору 1084 соединены с возможностью вращения с деталями 59 и 60 рукоятки 6. Передаточное отношение между соединительной рейкой 1074, ведомой шестерней 1800 и механизмом передачи к индикатору 1084 может быть предпочтительно выбрано таким, чтобы верхняя поверхность 1082 с зубцами имела размеры зубца, которые подходят по прочности, и чтобы механизм передачи к индикатору 1084 совершал не более одного оборота на протяжении всего цикла разреза/сшивания сочлененной передачи пускового механизма 1060.
Механизм передачи к индикатору 1084 выполняет по меньшей мере четыре функции, каждая из которых подробно рассмотрена ниже. Во-первых, когда соединительная рейка 1074 полностью втянута, а оба пусковых устройства 18 и 20 находятся в открытом положении, как показано на ФИГ. 42, отверстие 1086 в круговом гребне 1088 с левой стороны механизма передачи к индикатору 1084 приведено к передней поверхности 1090 запорного рычага 1048. Запорный рычаг 1048 перемещается в отверстие 1086 под действием закрывающего пускового устройства 18, которое, в свою очередь, переводится в открытое положение под действием пружины натяжения закрывающего пускового устройства 1092. Пружина натяжения закрывающего пускового устройства 1092 проксимально присоединяется к верхней части 1094 закрывающего пускового устройства 18 и деталям рукоятки 59 и 60 и, таким образом, получает энергию, аккумулированную во время закрывания закрывающего пускового устройства 18. Энергия толкает закрывающее пусковое устройство 18 в дистальном направлении, перемещая его в открытое положение.
Вторая функция механизма передачи к индикатору 1084 состоит в том, что он сообщается с роликом индикации втягивания 1096, размещенным снаружи на рукоятке 6. Таким образом, механизм передачи к индикатору 1084 сообщает относительное положение пускового механизма 1060 ролику индикации втягивания 1096, благодаря чему хирург получает визуальную информацию о количестве ходов пускового устройства 20, которая необходима для завершения манипуляции.
Третья функция механизма передачи к индикатору 1084 состоит в продольном и угловом перемещении пускового рычага с блокировкой обратного хода 1098 механизма блокировки обратного хода (механизм одностороннего вращения) 1097 во время работы сшивающего и рассекающего хирургического инструмента 10. Во время работы проксимальное перемещение пускового рычага с блокировкой обратного хода 1098 с помощью механизма передачи к индикатору 1084 приводит в действие механизм блокировки обратного хода 1097, который обеспечивает перемещение стержня пускового механизма 1010 в дистальном направлении и препятствует движению стержня пускового механизма 1010 в проксимальном направлении. В результате этого движения пусковая кнопка блокировки обратного хода 1100 выдвигается на проксимальном конце деталей рукоятки 59 и 60, и оператор может воспользоваться кнопкой, если во время работы необходимо втянуть пусковой механизм со сцепленной передачей 1060. По завершении работы механизм передачи к индикатору 1084 изменяет направление вращения по мере притягивания пускового механизма 1060. Вращение в обратном направлении приводит к деактивации механизма блокировки обратного хода 1097, инициирует втягивание пусковой кнопки блокировки обратного хода 1100 в рукоятку 6 и поворот пускового рычага с блокировкой обратного хода 1098 вправо, позволяя механизму передачи к индикатору 1084 непрерывно вращаться в обратном направлении.
Четвертая функция механизма передачи к индикатору 1084 состоит в том, что он получает момент от вращения ролика индикации втягивания 1096 вручную (по часовой стрелке, как показано на ФИГ. 42), обеспечивающий втягивание пускового механизма 1060 с разблокированным механизмом блокировки обратного хода 1097. Это позволяет преодолеть застревание пускового механизма 1060, которое нельзя преодолеть при помощи комбинированной пружины натяжения/сжатия 1062. Ручное втягивание может применяться после частичного срабатывания пускового механизма 1060, в противном случае срабатывает механизм блокировки обратного хода 1097, который заставляет пусковую кнопку блокировки обратного хода 1100 втягиваться так, что она не позволяет перемещать пусковой рычаг с блокировкой обратного хода 1098 в сторону.
Как показано на ФИГ. 42-43, механизм блокировки обратного хода 1097 состоит из доступного для оператора пускового рычага с блокировкой обратного хода 1098, проксимальный конец которого функционально соединен с пусковой кнопкой блокировки обратного хода 1100, а дистальный конец соединен с вилкой блокировки обратного хода 1102. Более конкретно, дистальный конец 1099 пускового рычага с блокировкой обратного хода 1098 сцепляется с вилкой блокировки обратного хода 1102 при помощи штифта для вилки блокировки обратного хода 1104. Вилка блокировки обратного хода 1102 перемещается в осевом направлении, сообщая вращение гильзе с криволинейным пазом для блокировки обратного хода 1106, которая фиксируется в осевом направлении с помощью деталей рукоятки 59 и 90 и охватывает выталкивающий стержень 1010 в дистальном направлении относительно места соединения выталкивающего стержня 1010 и шарнирной муфты 1070 соединительной рейки 1074. Вилка блокировки обратного хода 1102 сообщает продольное движение от пускового рычага с блокировкой обратного хода 1098 через ниппель гильзы с криволинейным пазом 1108 гильзе с криволинейным пазом для блокировки обратного хода 1106. Таким образом, продольное перемещение ниппеля гильзы с криволинейным пазом 1108 в скошенном пазу гильзы с криволинейным пазом для блокировки обратного хода 1106 заставляет вращаться гильзу с криволинейным пазом для блокировки обратного хода 1106.
Между проксимальным концом рамки 1016 и гильзой с криволинейным пазом для блокировки обратного хода 1106 зажаты, соответственно, пружина сжатия механизма блокировки обратного хода 1110, пластина механизма блокировки обратного хода 1112 и кулачковый патрон механизма блокировки обратного хода 1114. Как показано на фигуре, проксимальное перемещение выталкивающего стержня 1010 заставляет пластину механизма блокировки обратного хода 1112 перевернуться, что обеспечивает более плотный фрикционный контакт с выталкивающим стержнем 1010 и препятствует дальнейшему перемещению выталкивающего стержня 1010 в проксимальном направлении.
Поворот пластины механизма блокировки обратного хода 1112 осуществляется аналогично повороту фиксатора дверцы решетки, который удерживает дверцу решетки в открытом положении, когда гильза с криволинейным пазом для блокировки обратного хода 1106 подходит близко к кулачковому патрону механизма блокировки обратного хода 1114. Более конкретно, пружина сжатия механизма блокировки обратного хода 1110, воздействуя на верхнюю поверхность пластины 1112, переворачивает пластину механизма блокировки обратного хода 1112, переводя ее в закрытое положение. Вращение гильзы с криволинейным пазом для блокировки обратного хода 1106 инициирует криволинейное перемещение кулачкового патрона механизма блокировки обратного хода 1114 в дистальном направлении, в результате чего верхняя часть пластины механизма блокировки обратного хода 1112 прижимается в дистальном направлении, преодолевая силу воздействия пружины сжатия механизма блокировки обратного хода 1110. Таким образом пластина механизма блокировки обратного хода 1112 встает в перпендикулярное, разблокированное положение, позволяющее втягивать выталкивающей стержень 1010 в проксимальном направлении.
Как показано на ФИГ. 43, тяговый смещающий механизм 1078 включает предохранитель 1116, на котором есть выступающий в дистальном направлении узкий кончик 1118 и выступающий справа боковой штифт 1120, размещенный на проксимальном конце предохранителя и вставленный с возможностью вращения в отверстие 1076 в верхней части 230 пускового устройства 20. С правой стороны пускового устройства 20 боковой штифт 1120 принимает смещающий элемент, представленный в виде смещающего колеса 1122. По мере того как пусковое устройство 20 перемещается вперед и назад, смещающее колесо 1122 проходит по дуге проксимально правой половине детали 59 рукоятки 6, в дистальной части выходя за пределы смещающей направляющей 1124, встроенной в правую половину детали 59. Смещающее колесо 1122 предпочтительно может быть выполнено из упругого фрикционного материала, который позволит осуществлять вращение против часовой стрелки (если смотреть слева) на боковом штифте 1120 предохранителя 1116, смещая таким образом дистально выступающий узкий кончик 1118 в направлении вниз, на центральную направляющую дорожку 1075 ближайшего соединительного элемента 1072a-d, обеспечивая таким образом сцепление с соединительной рейкой 1074.
При отпускании пускового устройства 20 смещающее колесо 1122 обеспечивает тяговое смещение предохранителя 1116 в противоположном направлении, вынимая узкий кончик 1118 из центральной направляющей дорожки 1075 соединительной рейки 1074. Чтобы обеспечить незацепление наконечника 1118 в условиях высокой нагрузки и при практически полном выдвижении наружу предохранителя 1116, правая сторона предохранителя 1116 наезжает на проксимально ориентированную и направленную вверх коническую поверхность 1126 с правой стороны закрывающей вилки сцепления 250, чтобы отцепить узкий наконечник 1118 от центральной направляющей дорожки 1075. При отпускании пускового устройства 20 в любой момент до или после завершения полного хода, смещающее колесо 1122 позволяет поднимать и извлекать узкий кончик 1118 из центральной направляющей дорожки 1075. Несмотря на то, что на фигуре показано смещающее колесо 1122, необходимо понимать, что форма смещающего элемента или колеса 1122 представлена в иллюстративных целях и может варьироваться, а смещающий элемент может иметь любую форму, позволяющую использовать силу трения или тяги для работы концевого зажима 12.
Различные варианты осуществления хирургического инструмента 10 оснащены средствами регистрации условий работы инструмента в один или несколько моментов времени. На ФИГ. 44 представлена блок-схема системы 2000 регистрации параметров работы инструмента 10. Необходимо понимать, что такая система 2000 может использоваться в вариантах осуществления инструмента 10, оснащенных электроприводом, например, в вариантах осуществления, описанных выше и показанных на ФИГ. 1-40, а также в вариантах осуществления инструмента 10 с механическим приводом, например, в вариантах осуществления, описанных выше и показанных на ФИГ. 41-43.
Система 2000 может включать различные датчики 2002, 2004, 2006, 2008, 2010 и 2012 для регистрации параметров работы инструмента. Датчики могут быть установлены, например, на инструменте 10 или внутри него. В различных вариантах осуществления датчики могут быть специальными, предоставляющими выходные данные только для системы 2000, или могут быть двойного действия и выполнять другие функции внутри инструмента 10. Например, датчики 110, 130 и 142, как описано выше, также могут передавать данные в систему 2000.
Каждый датчик напрямую или опосредованно передает сигнал в запоминающее устройство 2001, которое регистрирует сигналы, как подробно описано ниже. В качестве запоминающего устройства 2001 может использоваться любое устройство с возможностью хранения или регистрации сигналов датчиков. Например, в качестве запоминающего устройства 2001 может использоваться микропроцессор, электрически программируемое ПЗУ (EEPROM) или любое другое допустимое устройство хранения данных. Запоминающее устройство 2001 может регистрировать сигналы, передаваемые датчиками, любым допустимым для этого способом. Например, в одном варианте осуществления запоминающее устройство 2001 регистрирует сигнал, поступающий от конкретного датчика, при изменении состояния сигнала. В другом варианте осуществления запоминающее устройство 2001 регистрирует состояние системы 2000, то есть сигналы всех датчиков, входящих в состав системы 2000, когда изменяется состояние сигнала одного из датчиков. Таким образом, возможно выполнение моментального снимка состояния инструмента 10. В различных вариантах осуществления запоминающее устройство 2001 и (или) датчики могут использовать продукты с использованием однопроводной шины 1-WIRE производства компании DALLAS SEMICONDUCTOR, например, 1-WIRE EEPROM.
В различных вариантах осуществления запоминающее устройство 2001 имеет внешний доступ, что позволяет использовать внешнее устройство, например, компьютер, для доступа к параметрам работы инструмента, хранящимся в запоминающем устройстве 2001. Например, запоминающее устройство 2001 может иметь порт передачи данных 2020. Порт передачи данных 2020 обеспечивает передачу сохраненных параметров работы инструмента в соответствии с любым протоколом проводной или беспроводной связи в последовательном или параллельном формате. Запоминающее устройство 2001 также может включать сменный носитель 2021 в дополнение или вместо внешнего порта 2020. В качестве сменного носителя 2021 может использоваться любое допустимое для этих целей устройство хранения данных, которое может быть извлечено из инструмента 10. Например, съемный носитель 2021 может содержать любой тип флэш-накопителя, такой как карта памяти «Международной ассоциации по картам памяти персональных компьютеров» (PCMCIA), карта COMPACTFLASH, карта MULTIMEDIA, карта FLASHMEDIA и др. Съемный носитель 2021 может также содержать любой вид устройства хранения на основе диска, включая, например, съемный жесткий диск, компакт-диск (CD), цифровой видео-диск (DVD), и др.
Датчик закрывающего пускового устройства 2002 контролирует состояние закрывающего пускового устройства 18. На ФИГ. 45 и 46 представлен пример варианта осуществления датчика закрывающего пускового устройства 2002. На ФИГ. 45 и 46 датчик закрывающего пускового устройства 2002 размещен между закрывающим пусковым устройством 18 и шарнирным штифтом 252. Необходимо понимать, что во время прижимания закрывающего пускового устройства 18 к пистолетной рукоятке 26 закрывающее пусковое устройство 18 воздействует с определенным усилием на шарнирный штифт 252. Датчик 2002 может регистрировать усилие и в ответ на него генерировать сигнал, например, как описано выше в отношении датчика 110 и показано на ФИГ. 10A и 10B. В различных вариантах осуществления в качестве датчика закрывающего пускового устройства 2002 может использоваться цифровой датчик, который показывает только то, приведено ли закрывающее пусковое устройство 18 в действие или нет. В различных вариантах осуществления в качестве датчика закрывающего пускового устройства 2002 может использоваться аналоговый датчик, который показывает усилие, воздействующее на закрывающее пусковое устройство 18 и (или) положение закрывающего пускового устройства 18. Если в качестве датчика закрывающего пускового устройства 2002 используется аналоговый датчик, по логике между датчиком 2002 и запоминающим устройством 2001 нужно разместить аналого-цифровой преобразователь. Однако необходимо понимать, что датчик закрывающего пускового устройства 2002 может быть выполнен в любой допустимой для этих целей форме и может быть размещен в любом допустимом месте, позволяющем регистрировать параметры работы закрывающего пускового устройства.
Датчик закрытия упорного элемента 2004 может контролировать закрытие упорного элемента 24. На ФИГ. 47 представлен пример варианта осуществления датчика закрытия упорного элемента 2004. Датчик 2004 установлен рядом или внутри серповидных отверстий 1006 канала для скобок 22, как показано на фигуре. При закрытии упорного элемента 24 шарнирные штифты упорного элемента 25 скользят в серповидных отверстиях 1006, контактируя с датчиком 2004 и заставляя датчик 2004 генерировать сигнал о том, что упорная пластина 24 находится в закрытом положении. В качестве датчика 2004 может использоваться цифровой или аналоговый датчик любого типа, подходящего для этих целей, в том числе датчик обнаружения и т.д. Необходимо понимать, что если в качестве датчика закрытия упорного элемента 2004 используется аналоговый датчик, по логике между датчиком 2004 и запоминающим устройством 2001 нужно разместить аналого-цифровой преобразователь.
Как показано на фигуре, тензодатчик закрытия упорного элемента 2006 размещается на внутренней нижней поверхности канала для скобок 22. На практике датчик 2006 может контактировать с нижней стороной картриджа со скобками 34 (не показан на ФИГ. 46). Когда упорная пластина закрывается, она прикладывает силу к картриджу 34 с шовными скобками, значение которой передается датчику 2006. В ответ на это датчик 2006 генерирует сигнал. Сигнал может быть аналоговым и пропорциональным усилию, с которым картридж со скобками 34 воздействует на датчик 2006 при закрытии упорного элемента 24. Как показано на ФИГ. 44, аналоговый сигнал подается в аналого-цифровой преобразователь 2014, который в свою очередь перед подачей сигнала в запоминающее устройство 2001 преобразует его из аналоговой в цифровую форму. Необходимо понимать, что варианты осуществления изобретения, в которых в качестве датчика 2006 используется цифровой или бинарный датчик, могут не предусматривать в составе аналого-цифрового преобразователя 2014.
Датчик пускового устройства 110 контролирует положение и (или) состояние пускового устройства 20. В вариантах осуществления хирургического инструмента с механическим двигателем датчик пускового устройства может попутно функционировать в качестве датчика запуска двигателя 110, описанного выше. Кроме того, датчик пускового устройства 110 может быть выполнен в любой из описанных выше форм. Он также может быть цифровым или аналоговым. На ФИГ. 45 и 46 представлен дополнительный вариант осуществления датчика пускового устройства 110. На ФИГ. 45 и 46 датчик пускового устройства размещен между пусковым устройством 20 и шарнирным штифтом пускового устройства 96. При натяжении пусковое устройство 20 воздействует на шарнирный штифт пускового механизма 96 с определенным усилием, регистрируемым датчиком 110. Как показано на ФИГ. 44, в таких вариантах осуществления, в которых передача данных датчиком пускового устройства 110 осуществляется в аналоговой форме, по логике между датчиком пускового устройства 110 и запоминающим устройством 2001 установлен аналого-цифровой преобразователь 2016.
Датчик положения скальпеля 2008 контролирует положение скальпеля 32 или режущей поверхности 1027 в канале для скобок 22. На ФИГ. 47 и 48 представлены варианты осуществления датчика положения скальпеля 2008, которые могут использоваться совместно со стволом с механическим приводом 8 и концевым зажимом 12, показанными на ФИГ. 41. Датчик 2008 включает магнит 2009, соединенный с выталкивающим стержнем 1022 инструмента 10. Пружина 2011 располагается вокруг стержня пускового механизма 1022 и может быть установлена, например, вдоль продольной выемки 1014 выталкивающего кюветообразного элемента 1012 (см. ФИГ. 41). По мере перемещения скальпеля 32 и режущей поверхности 1027 по каналу для скобок 22 выталкивающий стержень 1022 и магнит 2009 могут совершать возвратно-поступательное движение в спиральной пружине 2011. Такое движение относительно спиральной пружины создает в спиральной пружине напряжение, пропорциональное положению выталкивающего стержня внутри спиральной пружины и режущей кромки 1027 в канале для скобок 22. Напряжение передается в запоминающее устройство 2001, например, через аналого-цифровой преобразователь 2018.
В различных вариантах осуществления датчик положения скальпеля 2008 может быть заменен серией цифровых датчиков (не показаны), размещенных в различных точках на стволе 8 или внутри него. Цифровые датчики могут контролировать элементы выталкивающего стержня 1022, например, магнит 2009, при прохождении этого элемента по стволу 8. Положение выталкивающего стержня 1022 внутри ствола 8 и при выдвижении, а также положение скальпеля 32 в канале для скобок 22 может приблизительно соответствовать положению последнего сработавшего датчика.
Необходимо понимать, что положение скальпеля регистрируется в вариантах осуществления инструмента 10 с концевым зажимом 12 и стволом 8 с поворотным приводом, например, как описано выше и показано на ФИГ. 3-6. Датчик положения, например, датчик положения 268, может быть выполнен с возможностью генерировать сигнал, пропорциональный вращению винтового стержня 36 или любого другого приводного вала или передаточного устройства. Так как вращение стержня 36 или любого другого приводного вала или передаточного устройства пропорционально движению скальпеля 32 по каналу 22, сигнал, генерируемый датчиком положения 268, также пропорционален перемещению скальпеля 32. Таким образом, данные датчика положения 268 могут передаваться в запоминающее устройство 2001.
Датчик наличия картриджа 2010 контролирует наличие картриджа со скобками 34 в канале для скобок 22. В инструментах с механическим приводом датчик наличия картриджа 2010 также может функционировать в качестве датчика блокировки картриджа 136, описанного выше и показанного на ФИГ. 11. На ФИГ. 50 и 51 представлен вариант осуществления датчика наличия картриджа 2010. В представленном варианте осуществления изобретения датчик наличия картриджа 2010 имеет два контакта - 2011 и 2013. В случае отсутствия картриджа 34 контакты 2011 и 2013 образуют разомкнутую цепь. При наличии картриджа 34 лоток 1028 картриджа со скобками 34 взаимодействует с контактами 2011 и 2013, образуя замкнутую цепь. При разомкнутой цепи датчик 2010 может передавать логический ноль. При замкнутой цепи датчик 2010 может передавать логическую единицу. Данные с датчика 2010 передаются в запоминающее устройство 2001, как показано на ФИГ. 44.
Датчик состояния картриджа 2012 контролирует расход скобок в картридже 34, вставленном в канал для скобок 22. При продвижении по концевому зажиму 12 скальпель 32 толкает салазки 33, которые приводят в действие картридж со скобками. Затем скальпель 32 возвращается в исходное положение, оставляя салазки 33 на дистальном конце картриджа. Без направляющих салазок 33 скальпель 32 может падать в блокировочный карман 2022. Датчик 2012 может контролировать наличие скальпеля 32 в блокировочном кармане 2022, что косвенно свидетельствует о недостатке скобок в картридже 34. Следует понимать, что в различных вариантах осуществления датчик 2011 может прямо определять наличие салазок на проксимальном конце картриджа 34, устраняя необходимость скальпелю попадать в блокировочный карман 2022.
На ФИГ. 52A и 52B представлена последовательность операций 2200 для вариантов осуществления хирургического инструмента 10, используемого в качестве эндокатера с возможностью регистрации параметров работы инструмента в соответствии с различными вариантами осуществления. Как показано в блоке 2202, упорная пластина 24 инструмента 10 может быть закрыта. Это приводит к изменению состояния датчика закрывающего пускового устройства 2002 и (или) датчика закрытия упорного элемента 2006. В ответ запоминающее устройство 2001 может регистрировать состояние всех датчиков в системе 2000, как показано в блоке 2203. Как показано в блоке 2204, инструмент 10 может быть введен в организм пациента. После введения инструмента в организм пациента упорная пластина 24 может быть открыта и закрыта, как показано в блоке 2206, например, для выполнения манипуляций с тканью на операционном поле. Каждое открытие и закрытие упорного элемента 24 вызывает изменение состояния датчика закрывающего пускового устройства 2002 и (или) датчика закрытия упорного элемента 2004. В ответ запоминающее устройство 2001 регистрирует состояние системы 2000, как показано в блоке 2205.
Как показано в блоке 2208, ткань фиксируется для последующего рассечения и сшивания скобками. Если упорная пластина 24 не закрыта, в соответствии с блоком принятия решений 2210 требуется дальнейшая фиксация. Если упорный элемент 24 закрыт, тогда датчики 2002, 2004 и/или 2006 могут изменить состояние, побуждая запоминающее устройство 2001 записать состояние системы в ячейку 2213. Регистрация данных может включать в себя регистрацию данных давления при закрытии, полученных от датчика 2006. Как показано в блоке 2212, далее может выполняться рассечение и сшивание скобками. Датчик пускового устройства 110 может изменить состояние по мере натяжения пускового устройства 20 в направлении пистолетной рукоятки 26. Кроме того, при перемещении скальпеля 32 по каналу для скобок 22 датчик положения скальпеля 2008 изменяет состояние. В ответ запоминающее устройство 2001 может регистрировать состояние системы 2000 в соответствии с блоком 2013.
По завершении операции рассечения и сшивания скобками скальпель 32 возвращается в исходное положение. Так как скобки в картридже 34 закончились, скальпель 32 может провалиться в блокировочный карман 2022, в результате чего изменяется состояние датчика состояния картриджа 2012, побуждая запоминающее устройство 2001 регистрировать состояние системы 2000, как показано в блоке 2015. После этого упорная пластина 24 может быть разблокирована, освобождая ткань. Данное действие может вызвать изменения состояния одного или нескольких из датчика закрывающего пускового устройства 2002, датчика закрытия упорного элемента 2004 и тензодатчика закрытия упорного элемента 2006, в результате чего происходит регистрация состояния системы 2000, как показано в блоке 2017. После освобождения ткани упорная пластина 24 снова может быть закрыта, как показано в блоке 2220. Это вызывает другое изменение состояние у по меньшей мере датчиков 2002 и 2004, что, в свою очередь, побуждает запоминающее устройство 2001 регистрировать состояние системы, как показано в блоке 2019. Затем, инструмент 10 может быть извлечен из полости организма пациента, как показано в блоке 2222.
Если во время операции возникает необходимость повторного использования инструмента 10, как показано в блоке 2224, можно открыть упорный элемент, инициируя следующую регистрацию состояния системы, как показано в блоке 2223. Использованный картридж 34 может быть извлечен из концевого зажима 12, как показано в блоке 2226. Это вызывает изменение состояния датчика наличия картриджа 2010, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2225. В соответствии с блоком 2228, можно вставить другой картридж 34. Это вызывает изменение состояния датчика наличия картриджа 2010, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2227. Если другой картридж 34 является новым, то, согласно блоку принятия решений 2230, его установка также может вызвать изменение состояния датчика состояния картриджа 2012. В таком случае может регистрироваться состояние системы, как показано в блоке 2231.
На ФИГ. 53 представлен пример распределения памяти 2300 запоминающего устройства 2001 в соответствии с различными вариантами осуществления. Схема распределения памяти 2300 состоит из ряда столбцов 2302, 2304, 2306, 2308, 2310, 2312, 2314, 2316 и строк (не обозначены). В столбце 2302 указан номер события для каждой строки. В других столбцах представлены выходные данные одного из датчиков системы 2000. Данные от всех датчиков, сохраненные в определенный момент времени, могут быть записаны в одной строке под одним и тем же номером события. Таким образом, каждая строка отражает событие, в котором зарегистрированы один или несколько сигналов датчиков системы 2000.
В столбце 2304 приведены данные нагрузки закрытия, зарегистрированные при каждом событии. Они отражают выходные данные тензодатчика закрытия упорного элемента 2006. В столбце 2306 отражено положение рабочего хода. Эти данные могут быть получены от датчика положения скальпеля 2008. Например, совокупное перемещение скальпеля 32 можно разделить на части. Указанное в столбце 2306 число может отражать ту часть, в которой в настоящий момент находится скальпель 32. Нагрузка при рабочем ходе представлена в столбце 2308. Эти данные могут быть получены от датчика пускового устройства 110. Положение скальпеля представлено в столбце 2310. Данные о положении скальпеля могут быть получены от датчика положения скальпеля 2008, как и данные по рабочему ходу. В столбце 2312 представлены данные о том, в каком положении находится упорный элемент 24 - в открытом или закрытом. Эти данные могут быть получены на основе сигналов датчика закрытия упорного элемента 2004 и (или) тензодатчика закрытия упорного элемента 2006. Данные о наличии салазок 33 и состоянии картриджа 34 могут быть приведены в столбце 2314. Эти данные могут быть получены от датчика состояния картриджа 2012. Наконец, данные о наличии картриджа 34 могут быть представлены в столбце 2316. Эти данные могут быть получены от датчика наличия картриджа 2010. Необходимо понимать, что в запоминающем устройстве 2001 могут храниться и другие данные, отличные от тех, которые были использованы в примере, например, данные о начале и конце рабочего хода, например, полученные на основе сигналов датчиков 130 и 142.
На ФИГ. 54 и 55 показан другой вариант осуществления системы 2000. Проиллюстрированный вариант осуществления аналогичен показанному на ФИГ. 44, за исключением того, что на ФИГ. 54 датчики 2002-2010 обмениваются данными с блоком управления 2400, который предпочтительно располагается в рукоятке 6 инструмента, а более предпочтительно в пистолетной рукоятке 26 рукоятки 6. Блок управления 2400 может содержать процессор 2402 и запоминающее устройство 2001. Запоминающее устройство 2001 может содержать постоянное запоминающее устройство 2404 и оперативное запоминающее устройство 2406. Устройство управления 2400 также может включать аналого-цифровые преобразователи (АЦП) и цифро-аналоговые преобразователи (ЦАП) (не показаны) для обеспечения связи с датчиками 2002-2010. ПЗУ 2404 может включать устройства памяти EPROM и (или) Flash EEPROM. ОЗУ 2406 может включать кратковременную память, например, RAM (оперативную память). Различные компоненты устройства управления 2400 могут быть раздельными или могут быть объединены в один или несколько компонентов. Например, в одном из вариантов осуществления частью системы микроконтроллера или компьютерного чипа может являться процессор 2402, ПЗУ 2404, ОЗУ 2406, ЦАП и АЦП.
Устройство управления 2400 может питаться как от источника 2408, так и от батарейки. Для инструментов 10 с электродвигателем постоянного тока для подачи энергии на концевой зажим, источник энергии 2408, который подает энергию на устройство управления 2400, может быть тем же источником питания, который подает энергию на двигатель, или для устройства управления 2400 и двигателя 65 могут применяться разные источники энергии.
Данные с различных датчиков могут сохраняться в цифровой форме в одном или обоих устройствах памяти 2404 и 2406. Опубликованная патентная заявка США № 2007/0175964 A1, которая включена в настоящее описание путем отсылки, описывает эндоскопический рассекатель, который имеет запоминающее устройство для хранения и записи данных от датчика. Некоторые датчики могут передавать данные в аналоговой форме. Для преобразования сигналов от таких датчиков и их сохранения в устройствах памяти 2404 и 2406 могут использоваться АЦП. Кроме того, датчики могут подключаться к устройству управления 2400 посредством проводной и (или) беспроводной связи. Например, датчики и устройство управления 2400 могут обмениваться данными через шину 1-WIRE или I2C. В тех вариантах осуществления, в которых датчики подключаются к устройству управления 2400 по беспроводному каналу, они могут оснащаться транспондерами, сообщающимися с трансиверами (не показаны) устройства управления 2400.
Хотя это и не показано на ФИГ. 44, инструмент 10 может также содержать один или более датчик шарнира, который определяет состояние шарнирного направления концевого зажима. Например, датчики шарнира могут быть расположены в или около шарнира сочленения и определять относительное шарнирное направление между концевым зажимом 12 и стволом 8. Шарнирные датчики могут также обмениваться данными с устройством управления 2400, а данные от шарнирных датчиков могут храниться в запоминающем устройстве 2001 устройства управления 2400. Заявка на патент США № 12/124,655, озаглавленная «Хирургический инструмент с автоматически перестраиваемым шарнирным концевым зажимом», от 21 мая 2008 года, которая включена в настоящее описание посредством отсылки, предоставляет более подробную информацию относительно таких датчиков шарнира. Кроме того, среди датчиков могут быть различные датчики, связанные с двигателем, которые определяют условия двигателя 65, такие как количество оборотов в минуту и др.
В соответствии с различными вариантами осуществления данные, хранимые в запоминающем устройстве 2001, могут быть зашифрованы. Например, одно из запоминающих устройств 2404, 2406, такое как ПЗУ 2404, может содержать код шифрования или программу, которая при выполнении процессором 2402 приводит к тому, что процессор 2402 зашифровывает данные датчика, полученные от датчиков и хранимые в запоминающем устройстве 2001.
Устройство управления 2400 может также иметь порт вывода 2020, который внешне доступен компьютеру 2420 по каналу обмена данными 2422, подключенному к порту выхода 2020. Канал обмена данными 2422 может быть проводным или беспроводным каналом обмена данными. Например, порт вывода 2020 может включать порт серийных данных, такой как USB-порт (включая USB-порты типа A, типа B, Mini-A, или Mini-B), интерфейсный порт IEEE 1394 (включая IEEE 1394a, 1394b или 1394c), RS-232 порт, RS-423 порт, RS-485 порт, оптический порт, такой как SONET или SDH-порт или любой другой подходящий порт серийных данных для проводного порта обмена серийными данными 2422. Также канал обмена данными 2422 может быть портом обмена параллельно поступающими данными, таким как ISA, ATA, SCSI или PCI. Порт вывода 2020 может являться соответствующим портом выхода данных, поступающих параллельно, при таких условиях. К тому же канал обмена данными 2422 может быть беспроводным каналом данных, таким как канал, использующий один из стандартов IEEE 802.11.
Удаленный компьютер 2420 может являться любым устройством с процессором и запоминающим устройством, способным обмениваться данными с устройством управления 2400 и загружать данные датчика, хранимые в запоминающем устройстве 2001. Например, удаленный компьютер 2420 может являться настольным компьютером, сервером, ноутбуком, рабочей станцией, портативным компьютером, миникомпьютером, миниатюрным носимым компьютером и т.п. Такой компьютер 2420 может быть внешним по отношению к инструменту 10 (т.е. не являться частью инструмента 10), а может располагаться относительно близко от инструмента 10, когда данные загружаются на компьютер 2420, или компьютер 2420 может располагаться более удаленно от инструмента 10, например, в соседней комнате или еще дальше.
На ФИГ. 56 показана блок-схема, иллюстрирующая процесс в соответствии с различными вариантами осуществления настоящего изобретения. Процесс начинается на этапе 2500, когда врач проводит хирургическую процедуру с использованием инструмента 10. На этапе 2502 различные датчики инструмента улавливают данные и передают их к устройству управления 2400. На этапе 2504 данные могут быть зашифрованы устройством управления 2400, а на этапе 2506 зашифрованные данные сохраняются в запоминающем устройстве 2001. В других вариантах осуществления данные не нуждаются в шифровании, или зашифровывается лишь часть полученных от датчиков данных. Далее на этапе 2508 устанавливается канал передачи данных между компьютером 2420 и устройством управления 2400, такой как канал передачи данных через порт выхода 2020. Затем на этапе 2510 некоторые или все данные от датчиков, хранимые в запоминающем устройстве, загружаются на удаленный компьютер 2420. Для вариантов осуществления, в которых данные хранятся в зашифрованном виде, удаленный компьютер 2420 может расшифровывать данные до или после их загрузки в запоминающее устройство удаленного компьютера 2420. На этапе 2512, можно проводить операции с данными, уже хранящимися на удаленном компьютере 2420. Например, можно проводить расчеты или анализ данных, или данные могут быть загружены или переданы на другой носитель информации.
Описанные в настоящем документе устройства могут быть предназначены для одноразового применения (каждая процедура может включать несколько сшиваний) или для многоразового использования. В любом случае, устройство может быть переделано для использования после по меньшей мере одной процедуры. Восстановление может включать в себя любую комбинацию стадий разборки устройства, затем чистки или замены отдельных элементов и последующей повторной сборки. В частности, можно разобрать устройство и избирательно заменить или удалить в любой комбинации любое количество отдельных элементов или частей устройства. После чистки и/или замены отдельных частей устройство можно снова собрать в центрах по ремонту или в операционном блоке непосредственно перед хирургической операцией для последующего использования. Специалистам в данной области будет очевидно, что при восстановлении устройства можно использовать различные способы разборки, чистки/замены и повторной сборки. Использование таких способов, а также полученное в результате восстановленное устройство входят в сферу действия настоящей заявки.
Предпочтительно, чтобы описанные в настоящем документе различные варианты осуществления были обработаны перед началом операции. Сначала новый или использованный инструмент получают и при необходимости чистят. Затем инструмент можно стерилизовать. В одном способе стерилизации инструмент помещается в закрытый и герметичный контейнер, такой как термоформируемый пластиковый пакет с верхним слоем из материала Тайвек (TYVEK). Затем контейнер и инструмент помещают в поле воздействия излучения, которое может проникать в контейнер, такого как гамма-излучение, рентгеновские лучи или электроны высокой энергии. Излучение убивает бактерии на поверхности инструмента и в контейнере. Затем стерилизованный инструмент можно хранить в стерильном контейнере. Герметичный контейнер сохраняет инструмент в стерильном состоянии до его открытия в медицинском учреждении.
Предпочтительно проводить стерилизацию устройства. Это может осуществляться различными путями, известными специалистами в данной области, включая бета- или гамма-излучение, оксид этилена, пар и прочие методы.
Описанное выше изобретение также находит применение в робототехнических хирургических системах. Такие системы хорошо известны в данной области и включают выпускаемые компанией Intuitive Surgical, Inc., Саннивейл, штат Калифорния. Примеры также раскрыты в Патентах США 6,783,524; 7,524,320; и 7,824,401. Все из них включены в настоящее описание посредством отсылки. Вообще, робототехнические хирургические системы имеют дистанционно управляемый пользовательский интерфейс и удаленный управляемый манипулятор, который настроен для взаимодействия и для функционирования хирургических инструментов и систем. Манипуляторы управляются электронной(ыми) системой(ами) управления, которые, как правило, адаптированы к локализованной консоли для взаимодействия с пользователем. Инструменты могут получать питание либо локально от хирургической системы, или они могут иметь изолированные системы электропитания от общей робототехнической системы управления.
Робототехническая хирургическая система содержит управляющий узел, монитор, робот, и по меньшей мере один надежно прикрепленный узел нагружения, прикрепленный к манипулятору, имеющий по меньшей мере один хирургический инструмент для выполнения по меньшей мере одной хирургической задачи и выполненный с возможностью отсоединения от дистального конца манипулятора.
В еще одном варианте осуществления робототехническая хирургическая система включала в себя процессор, по меньшей мере, один датчик для определения расположения по меньшей мере одного соединения привода электродвигателя, приемник для приема электрических сигналов, переданных из блока сшивания и контролирующих его движения.
Пример одноразового узла нагружения для использования с роботом описан в Патенте США № 6231565 Тови и соавторов. Пример хирургического робота с пропорциональным управлением хирурга описан в патенте США № 5624398 Смита и соавторов.
Другой аспект настоящего изобретения состоит в том, что робототехническая система имеет корпус, манипулятор, который может перемещаться относительно корпуса и имеет узел сшивания с удлиненной трубкой, соединяющей узел сшивания с манипулятором. И удлиненная трубка с узлом сшивания, и узел сшивания сам по себе присоединен с возможностью отсоединения и функционально связан с роботом-манипулятором. Одна конфигурация узла сшивания может быть снята, а другая конфигурация прикреплена и использована.
Что касается ФИГ. 4-5, робототехническая система содержит соединительный элемент, который прикреплен с возможностью отсоединения к проксимальному концу стержня привода вращения 48. Соединение далее настраивается на блокировку внутри проксимального конца держателя желоба 46, помещенного между внутренней частью крышки 271, которая также с держателем желоба 46.
Хотя настоящее изобретение было проиллюстрировано с помощью нескольких вариантов осуществления и указанные варианты осуществления были описаны достаточно подробно, заявитель не имеет намерения сократить или иным образом ограничить объем прилагаемой формулы изобретения до данных вариантов осуществления. Дополнительные преимущества и модификации сразу станут очевидны для специалистов в данной области. В различных вариантах осуществления настоящего изобретения представлен обширный спектр улучшений по сравнению с прежними методами сшивания, требующими применения скобок различных типоразмеров, имеющих различные сформированные (конечные) значения высот, в одной кассете.
Соответственно, настоящее изобретение описано в контексте эндоскопических процедур и эндоскопического устройства. Тем не менее, термин «эндоскопический» в настоящем документе не может считаться ограничивающим настоящее изобретение рамками рассекающих и сшивающих хирургических инструментов, использующихся только в сочетании с эндоскопическим каналом (т.е. канюлей или троакаром). Наоборот, предполагается, что настоящее изобретение может найти применение в любых процедурах с ограниченным доступом, в частности, в лапароскопии, а также в операциях из открытого доступа. Более того, уникальные и вновь выявленные аспекты разных вариантов осуществления с использованием кассет со скобками в рамках настоящего изобретения могут находить применение в сочетании с другими видами сшивающих инструментов, не отходя от сути и области действия настоящего изобретения.
Любой патент, публикация или информация в полном объеме или частично, которая упомянута, как включенная посредством отсылки в настоящее описание, включена в него до той степени, что включенный материал не противоречит с существующими определениями, утверждениями или другим раскрываемым материалом, указанном в настоящем документе. Таким образом, описание, как ясно указано в настоящем документе, заменяет любой противоречащий материал, включенный в настоящий документ посредством отсылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОСТУП К ДАННЫМ, ХРАНЯЩИМСЯ В ЗАПОМИНАЮЩЕМ УСТРОЙСТВЕ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2623305C2 |
| ПРЕДОСТАВЛЕНИЕ ОПЕРАТИВНОЙ ОБРАТНОЙ СВЯЗИ ДЛЯ ПОЛЬЗОВАТЕЛЯ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2690397C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С БЕСПРОВОДНОЙ СВЯЗЬЮ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ И УДАЛЕННЫМ ДАТЧИКОМ | 2012 |
|
RU2621125C2 |
| СТЕРИЛИЗУЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2524114C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ, АНАЛИЗИРУЮЩИЙ ТОЛЩИНУ ТКАНИ | 2010 |
|
RU2566079C2 |
| УСОВЕРШЕНСТВОВАНИЕ ПРИВОДНОГО ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА | 2010 |
|
RU2525225C2 |
| УСОВЕРШЕНСТВОВАНИЕ ПРИВОДНОГО ХИРУРГИЧЕСКОГО СШИВАЮЩЕГО ИНСТРУМЕНТА | 2010 |
|
RU2546958C2 |
| КОМПОНЕНТЫ ДЛЯ ИСПОЛЬЗОВАНИЯ В СТЕРИЛЬНОМ ОКРУЖЕНИИ | 2010 |
|
RU2554224C2 |
| МЕХАНИЗМЫ РЕГУЛИРОВКИ МОЩНОСТИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ И АККУМУЛЯТОРОВ | 2011 |
|
RU2573584C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ И БАТАРЕИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2011 |
|
RU2569712C2 |
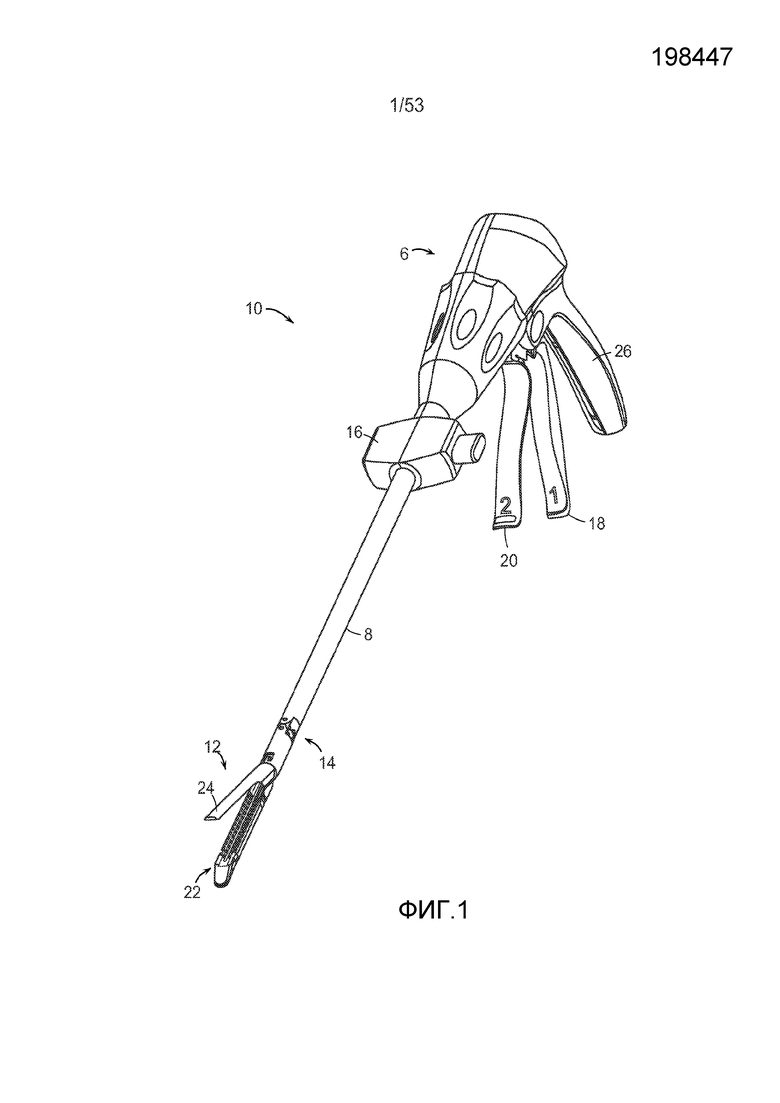
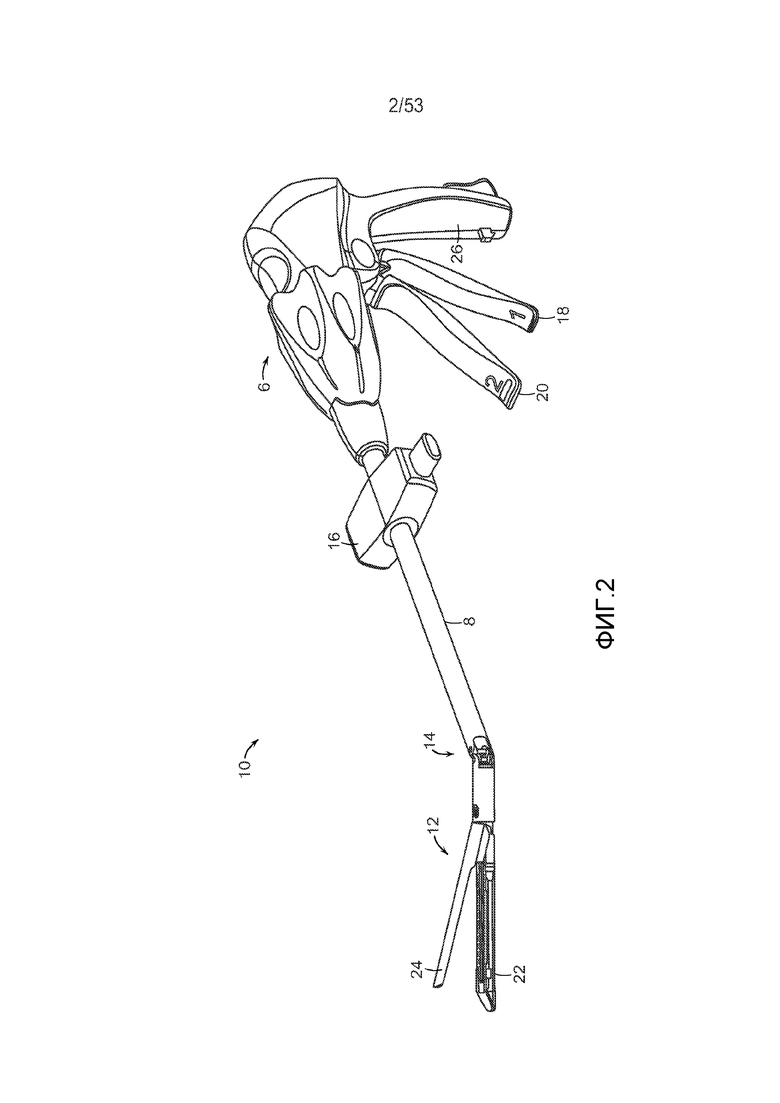
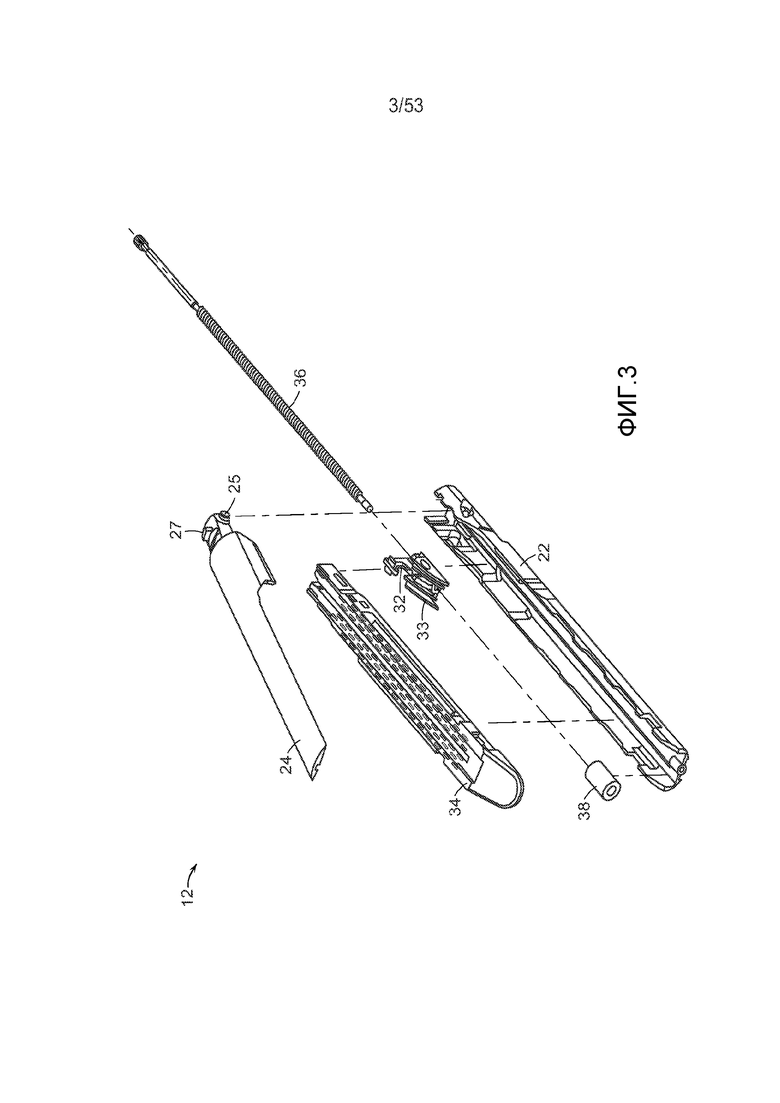
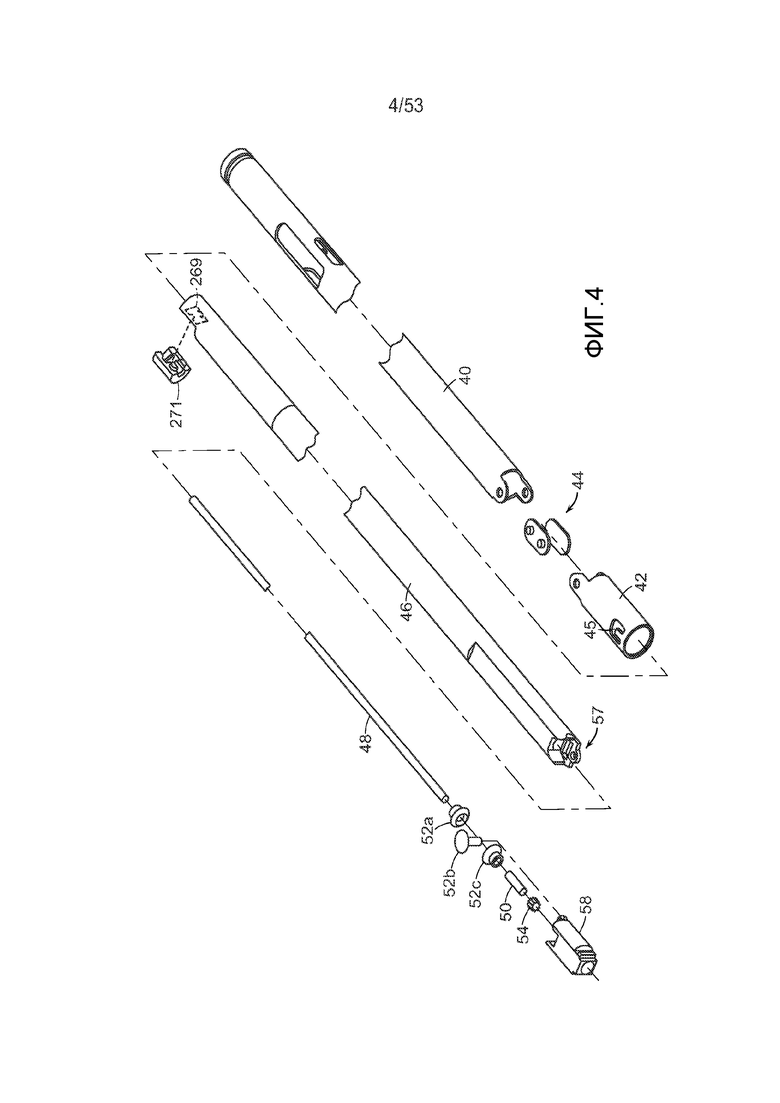
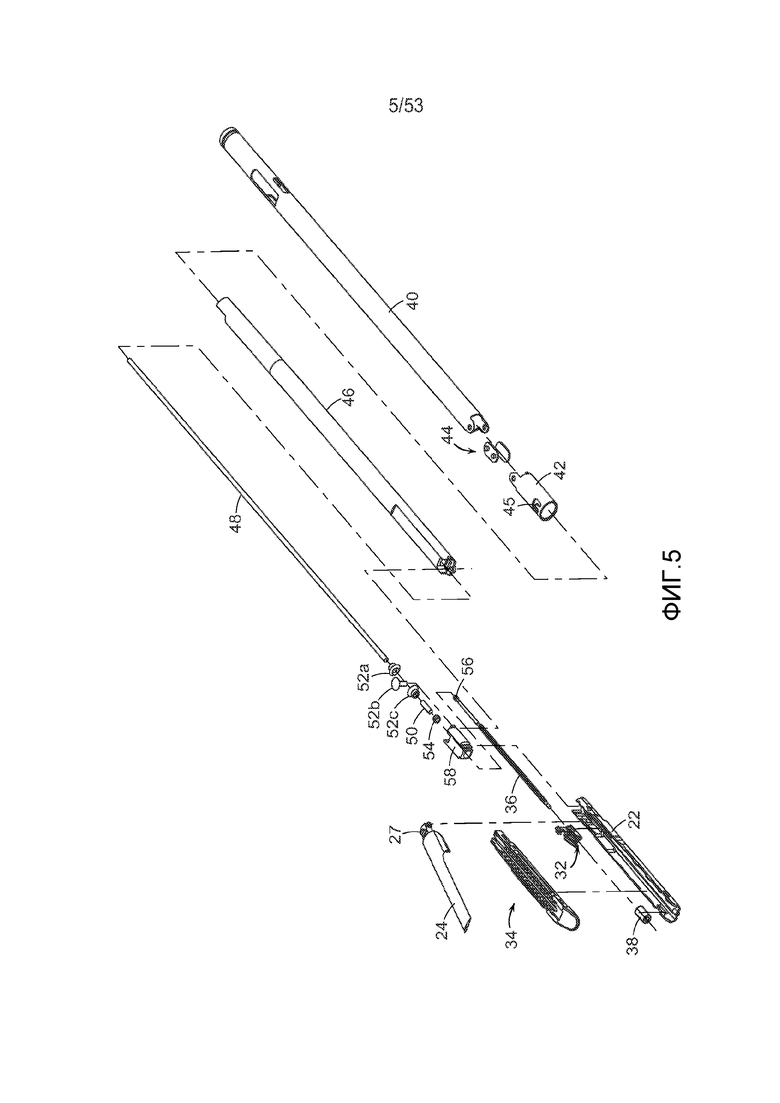
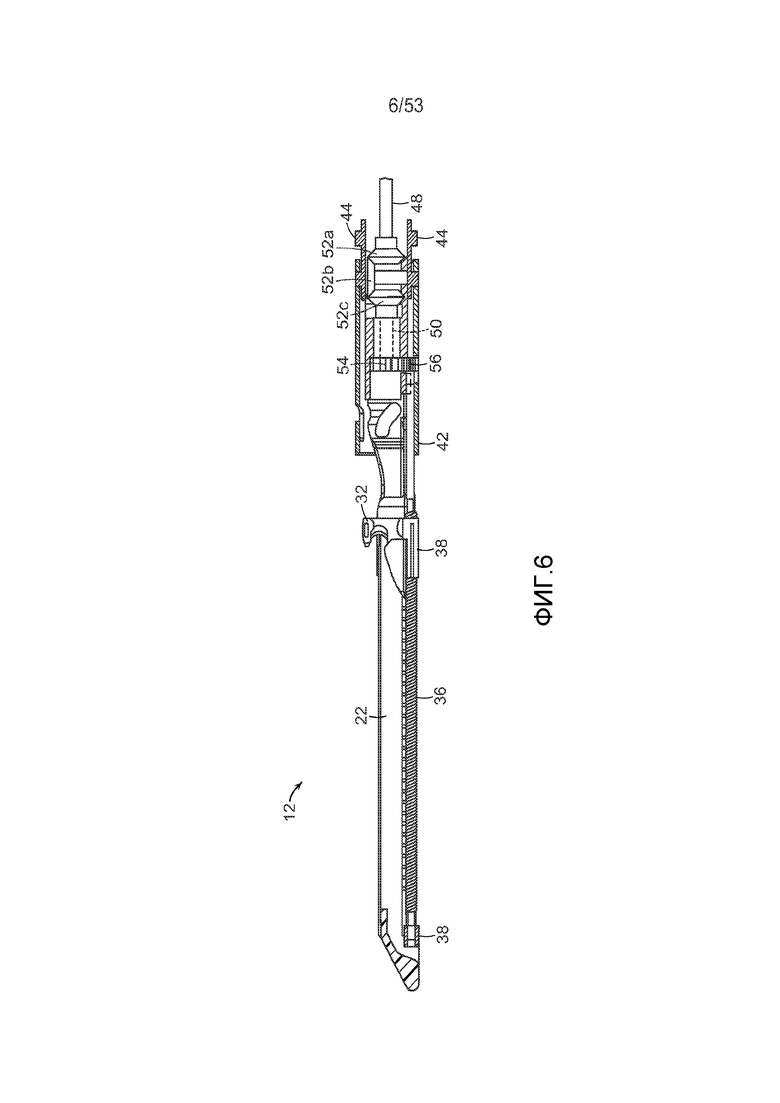
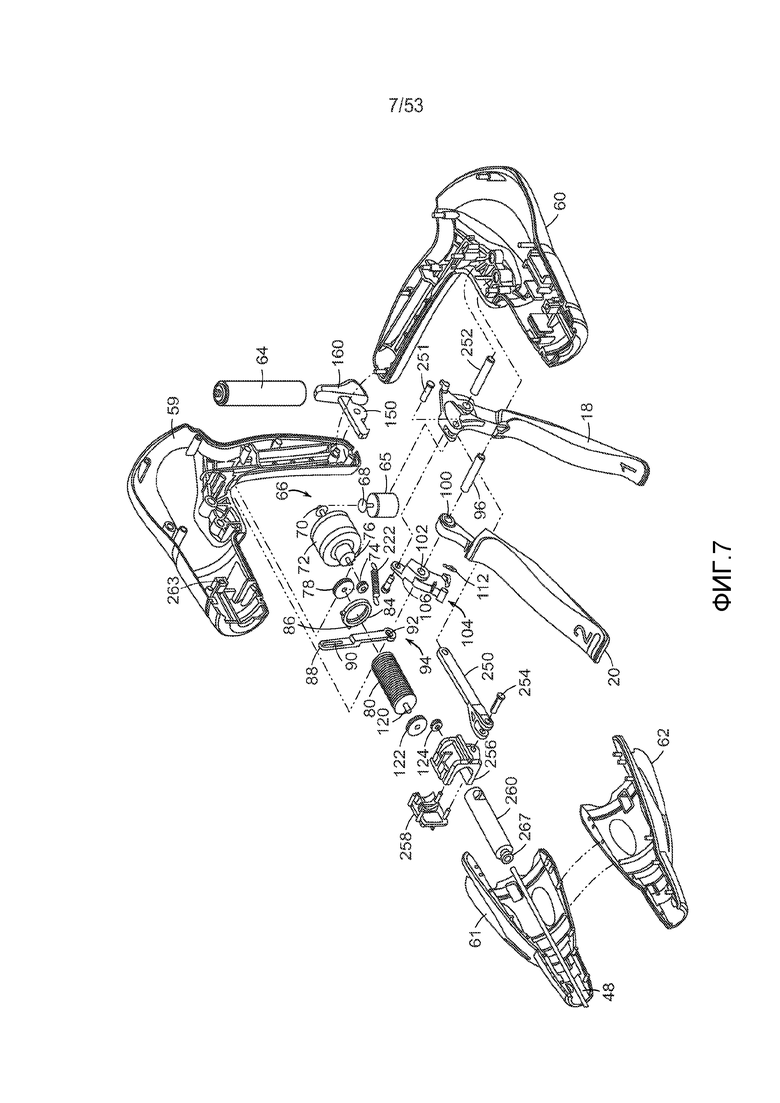
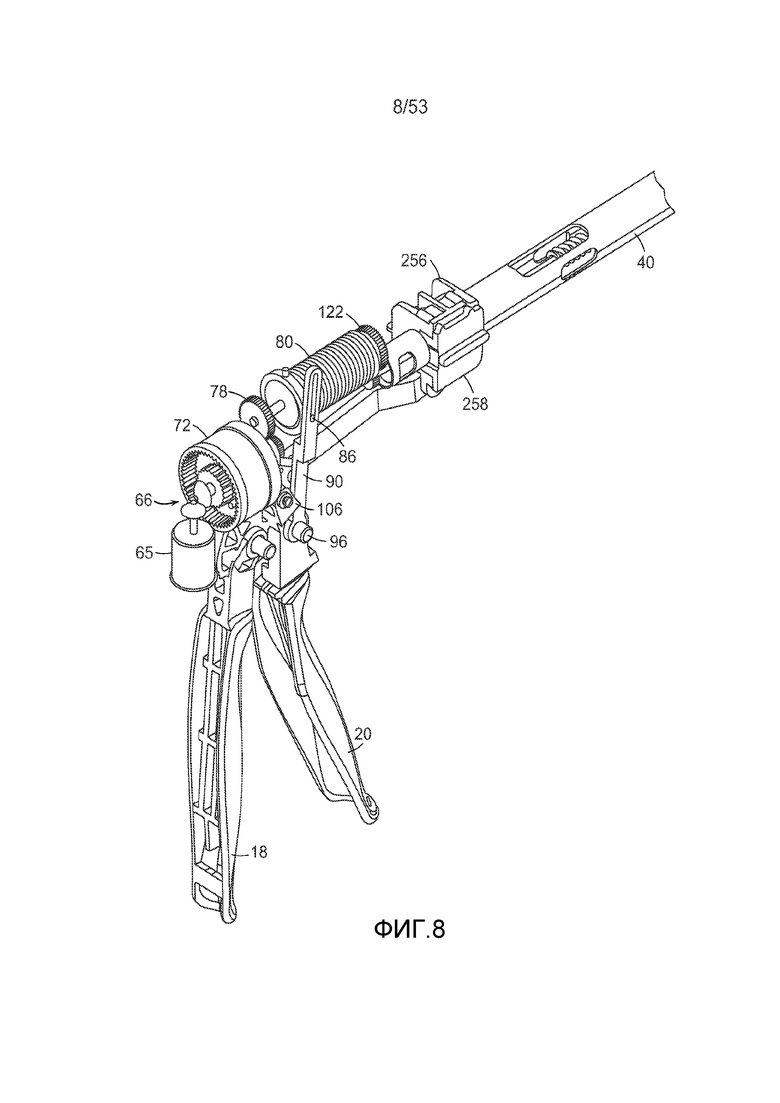
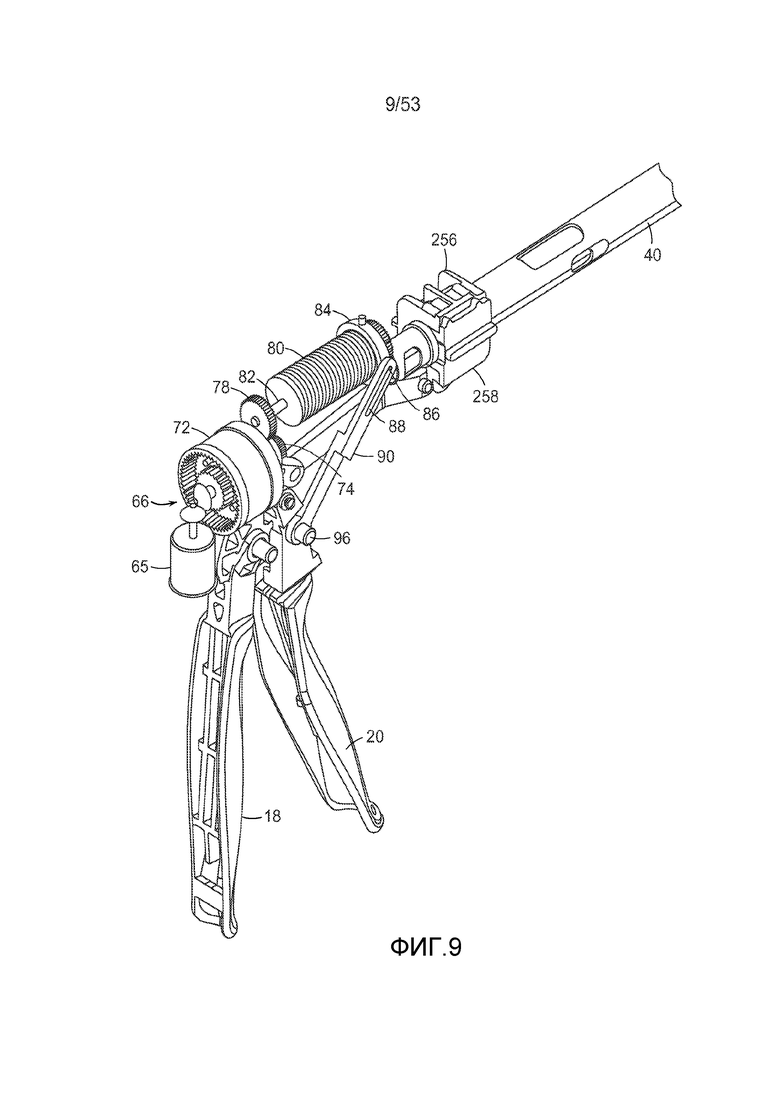
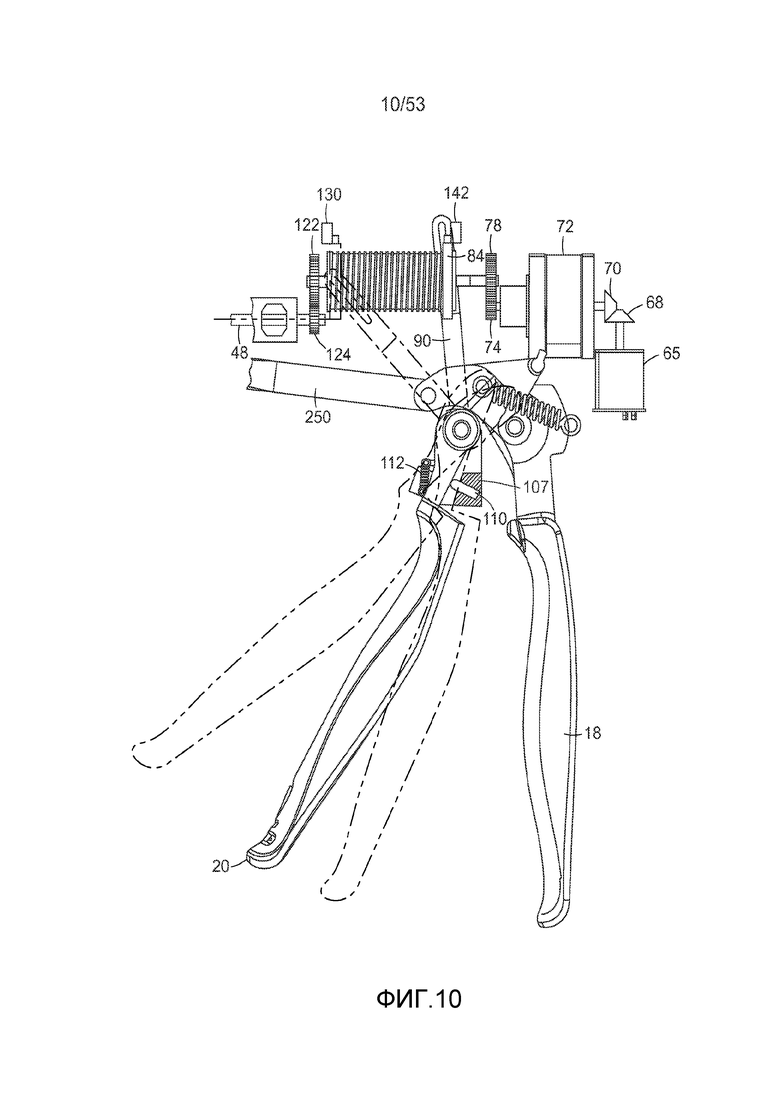
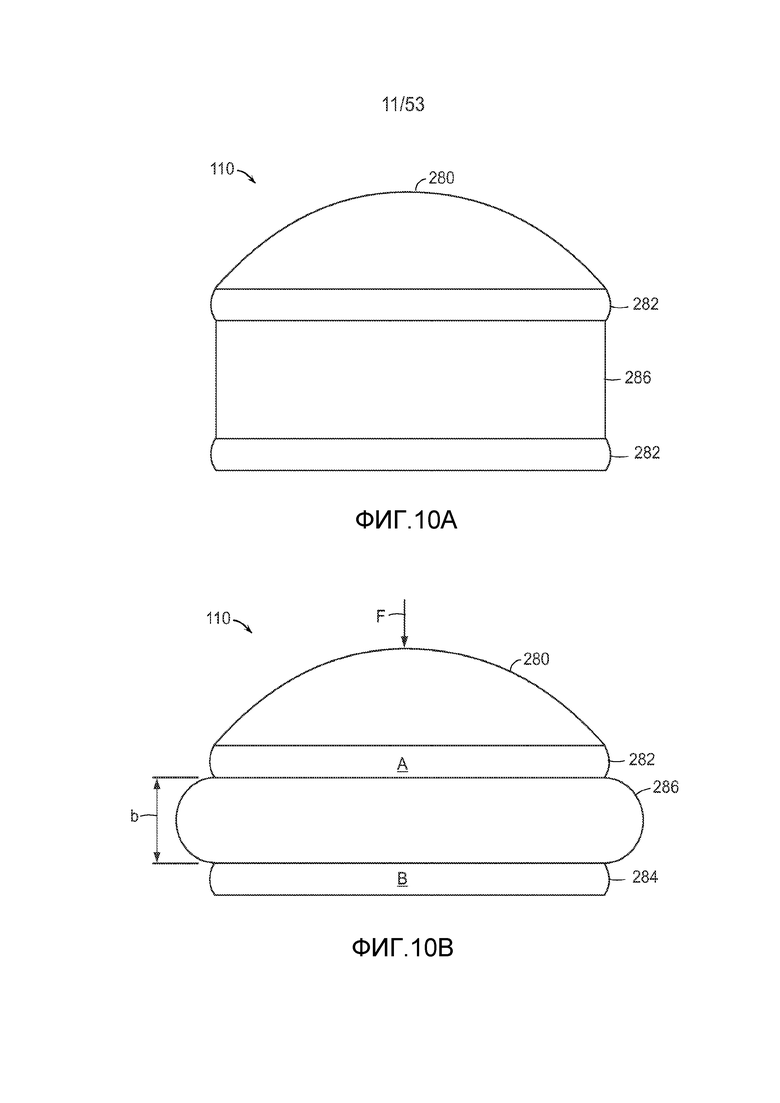

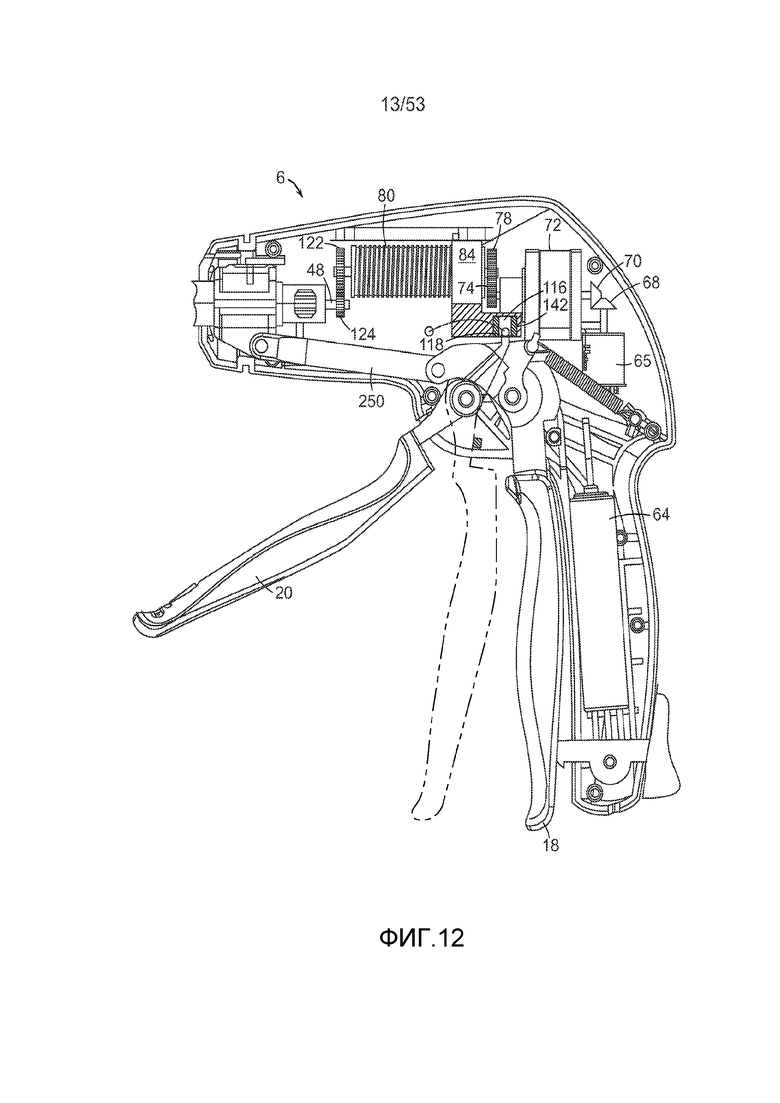
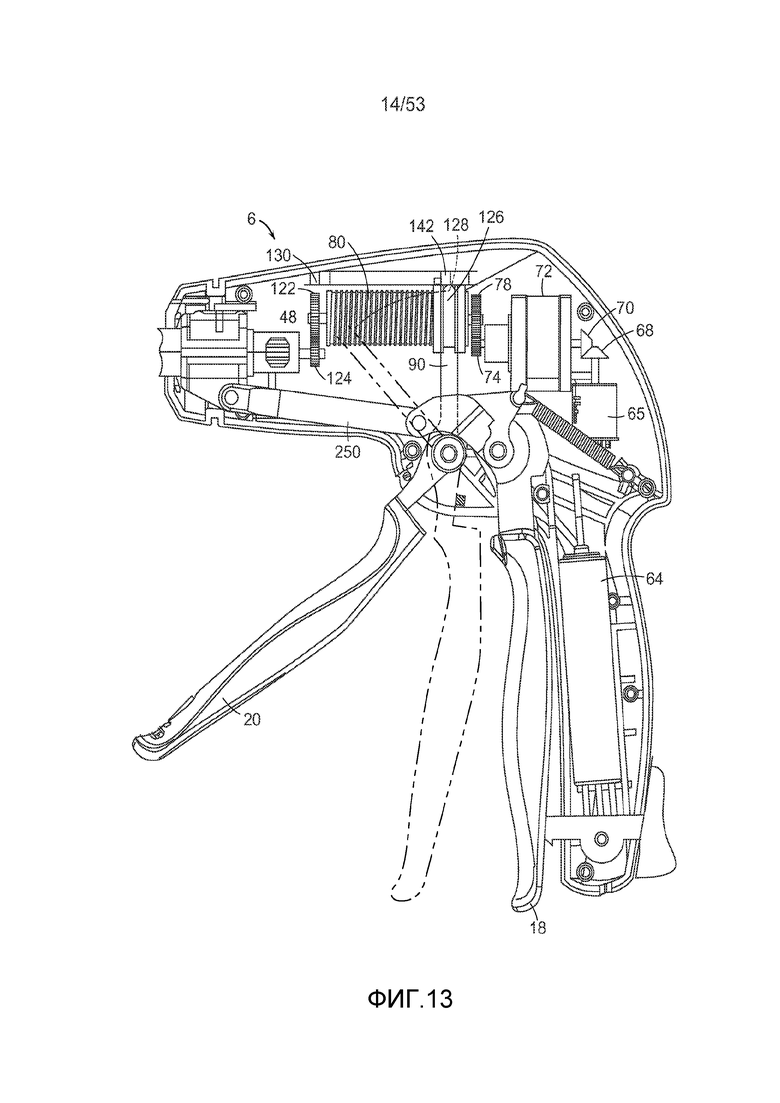
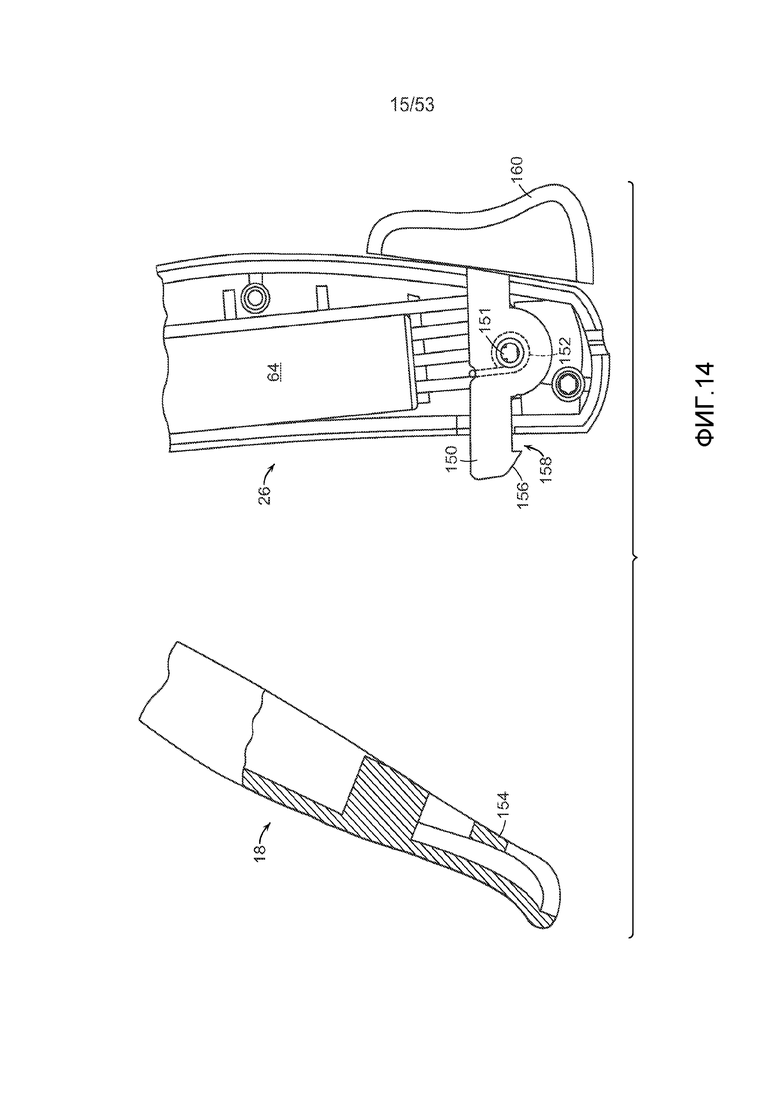
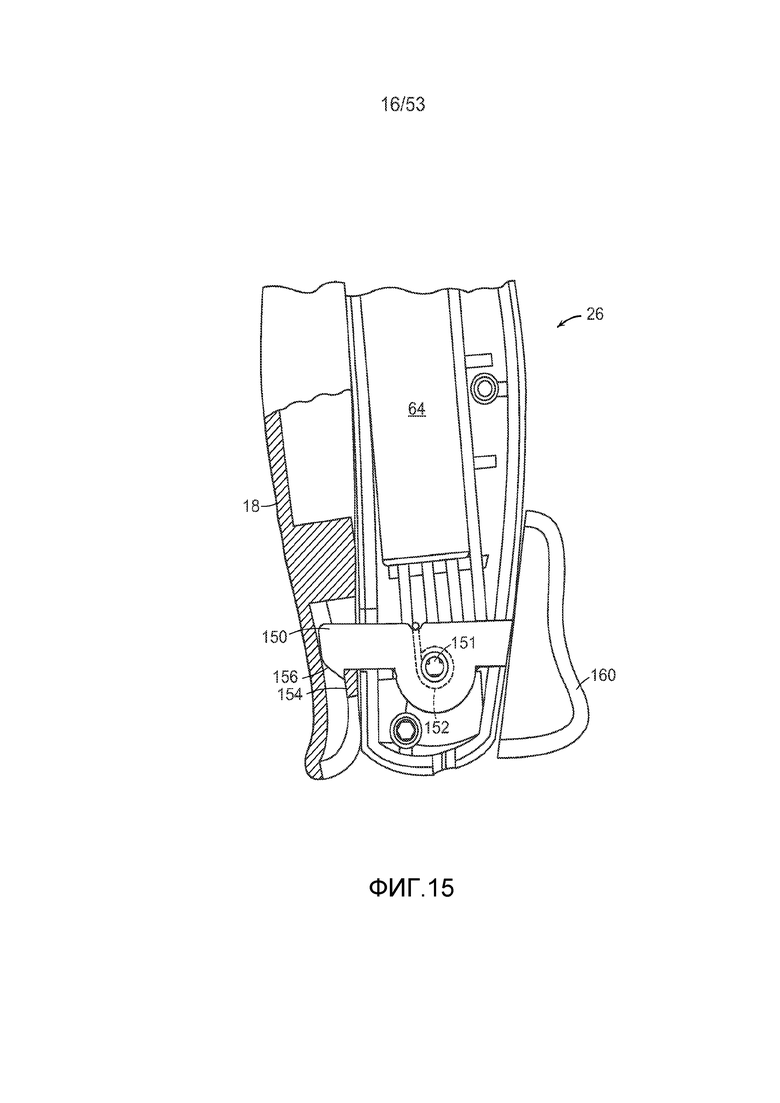
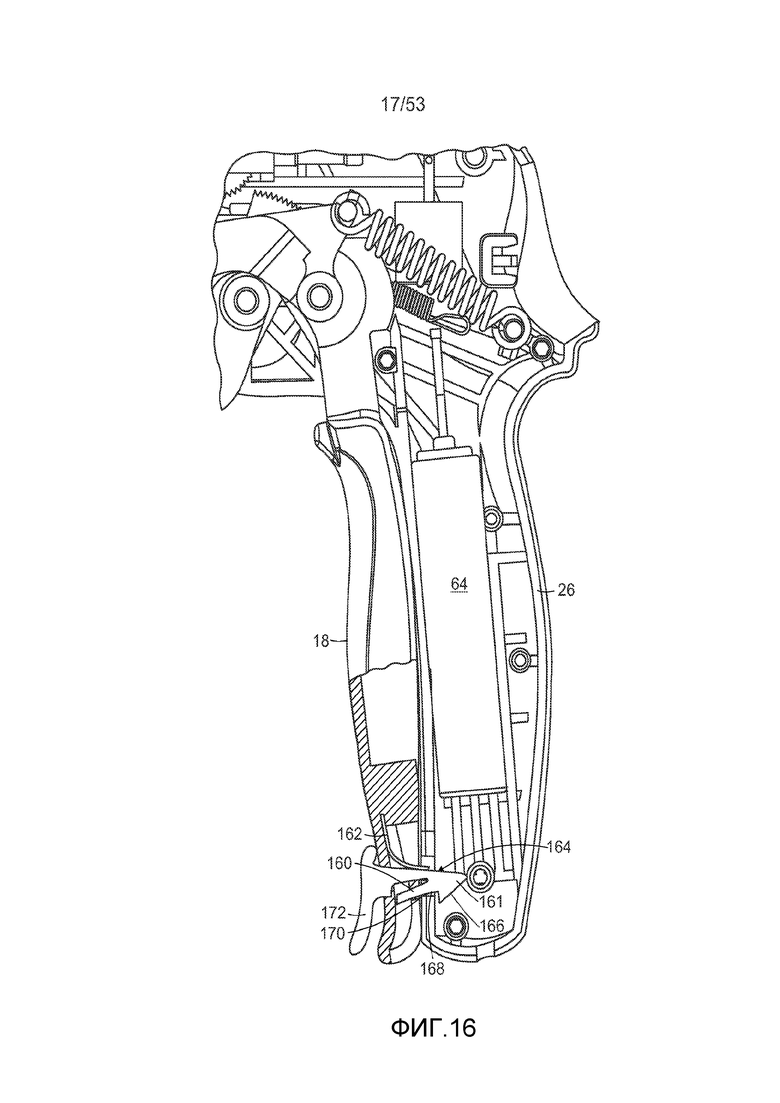
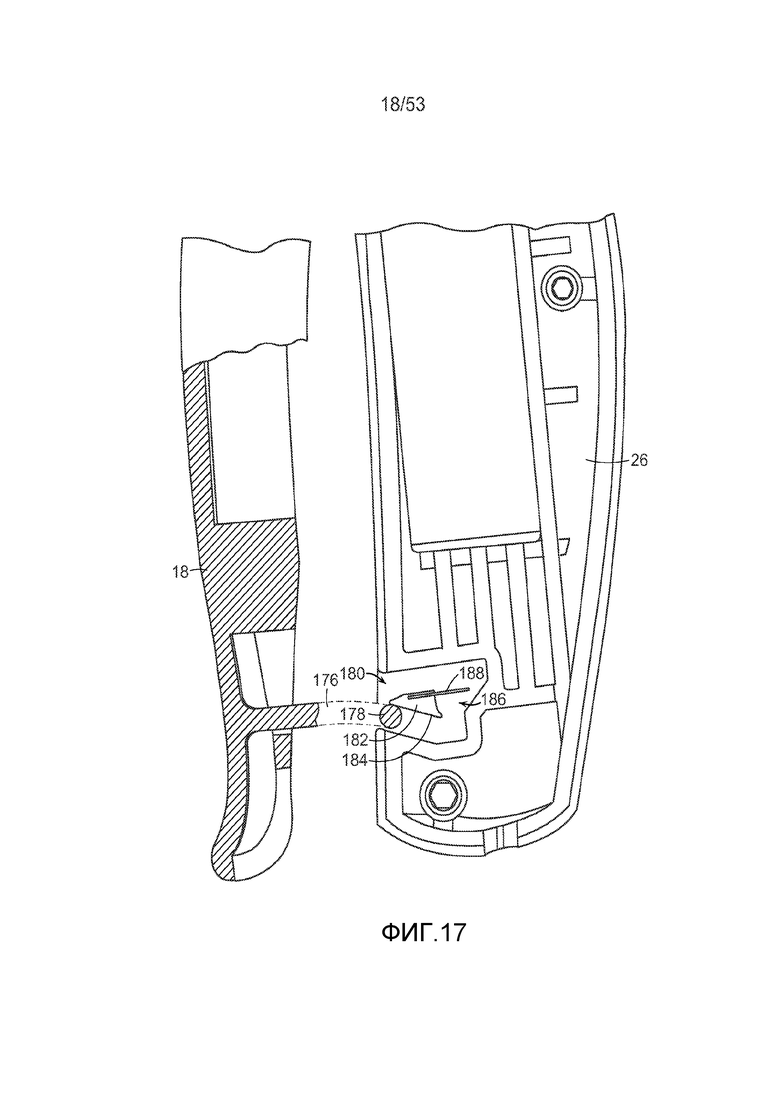
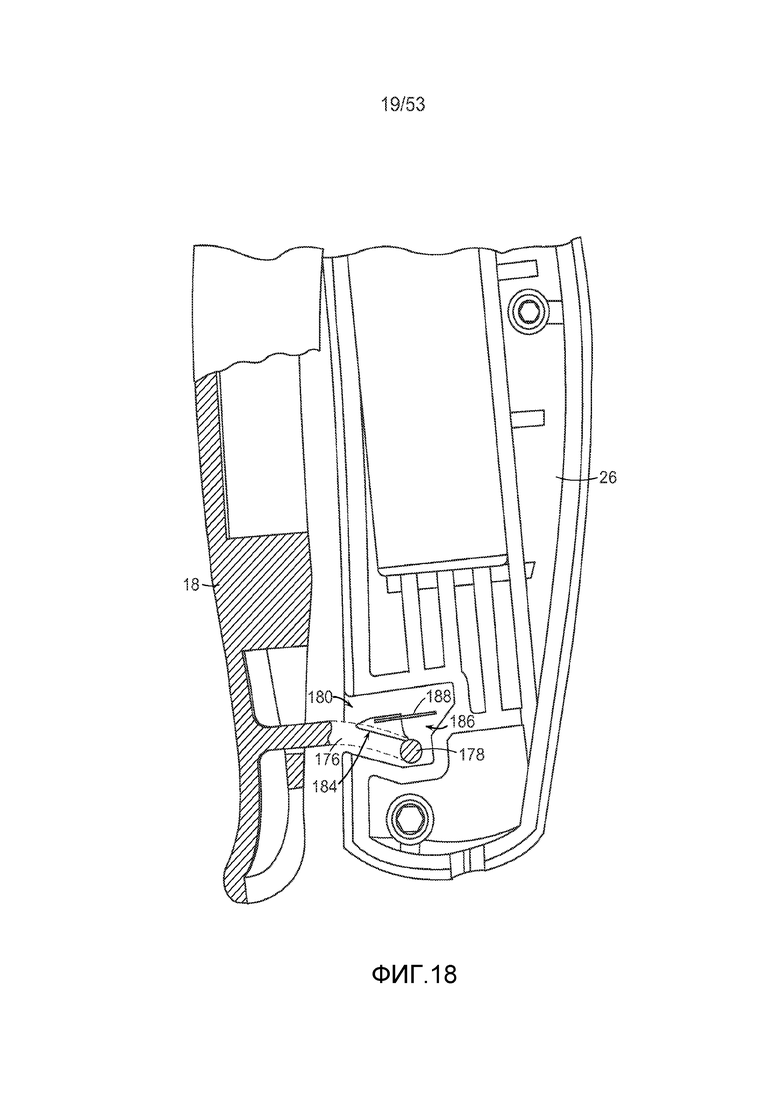
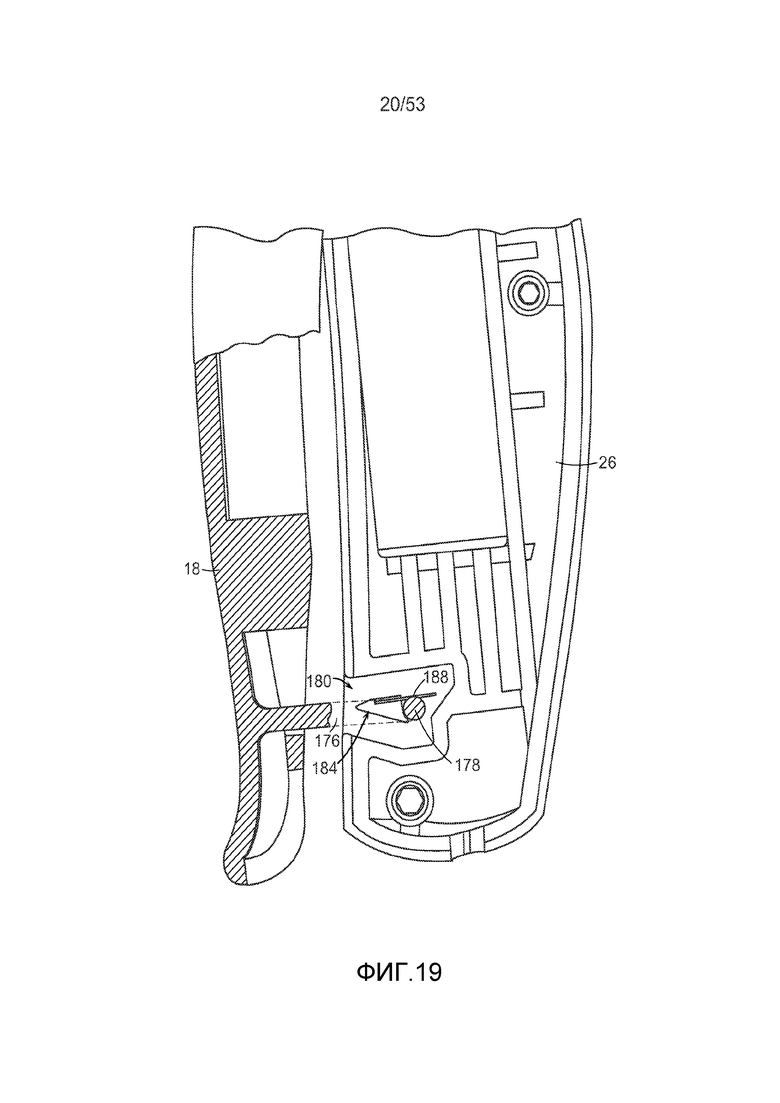
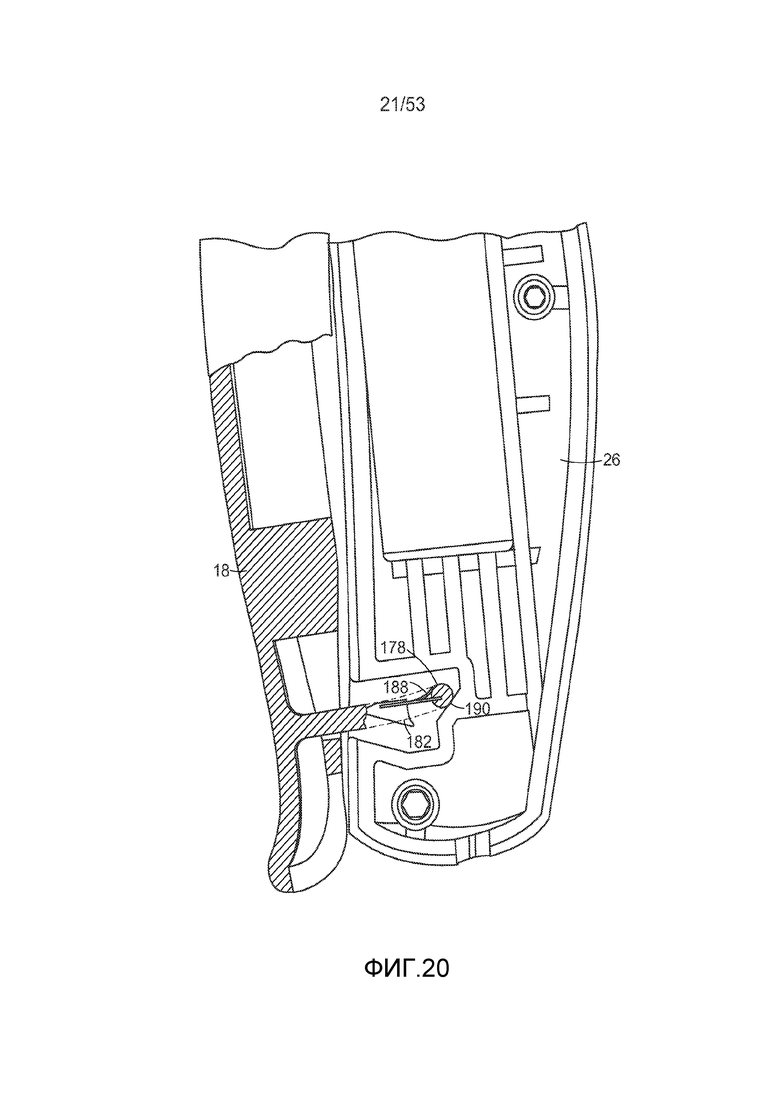
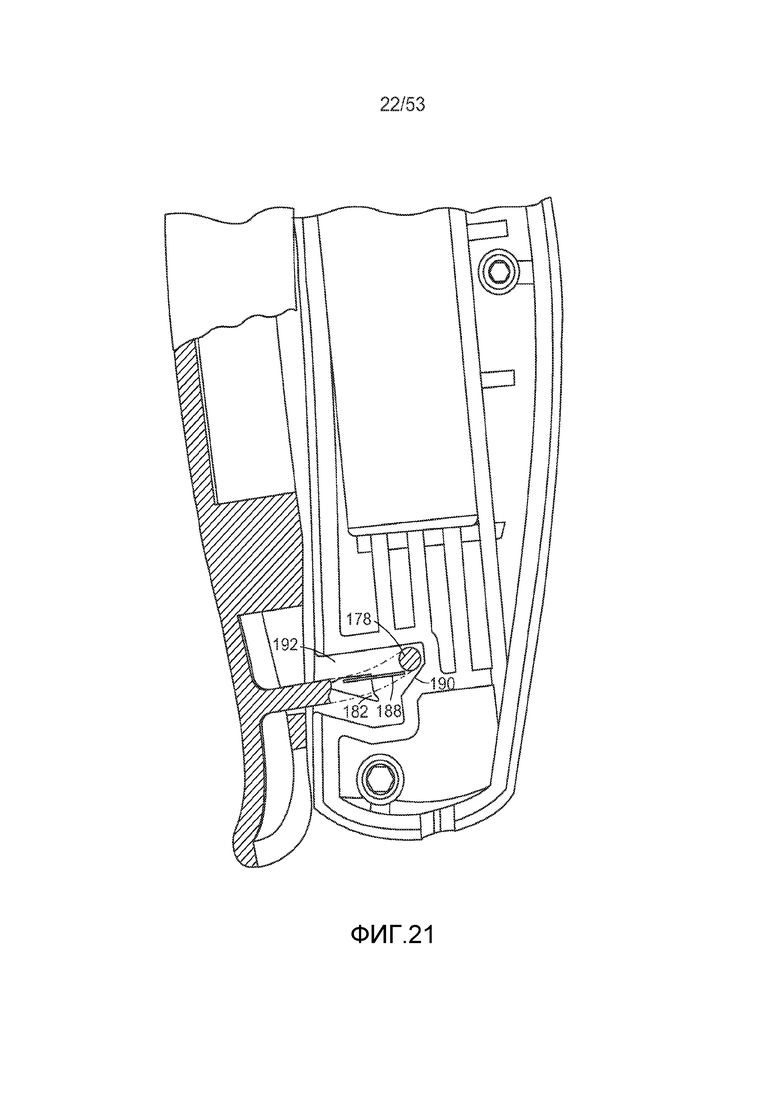
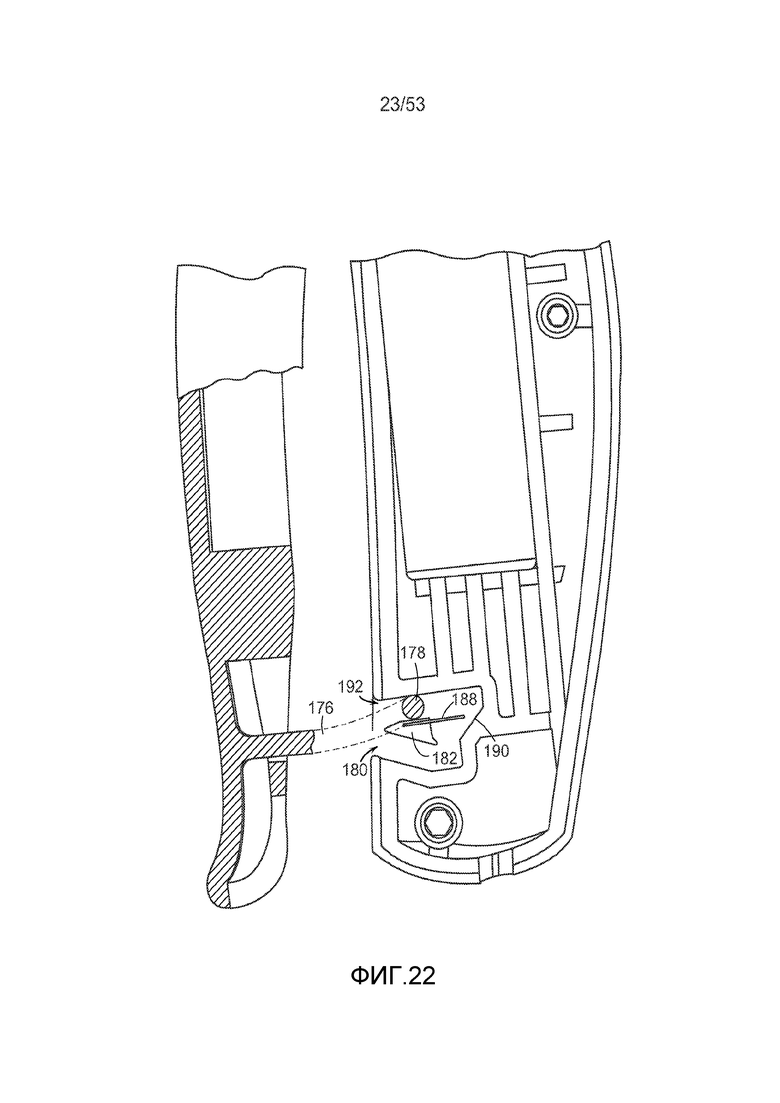
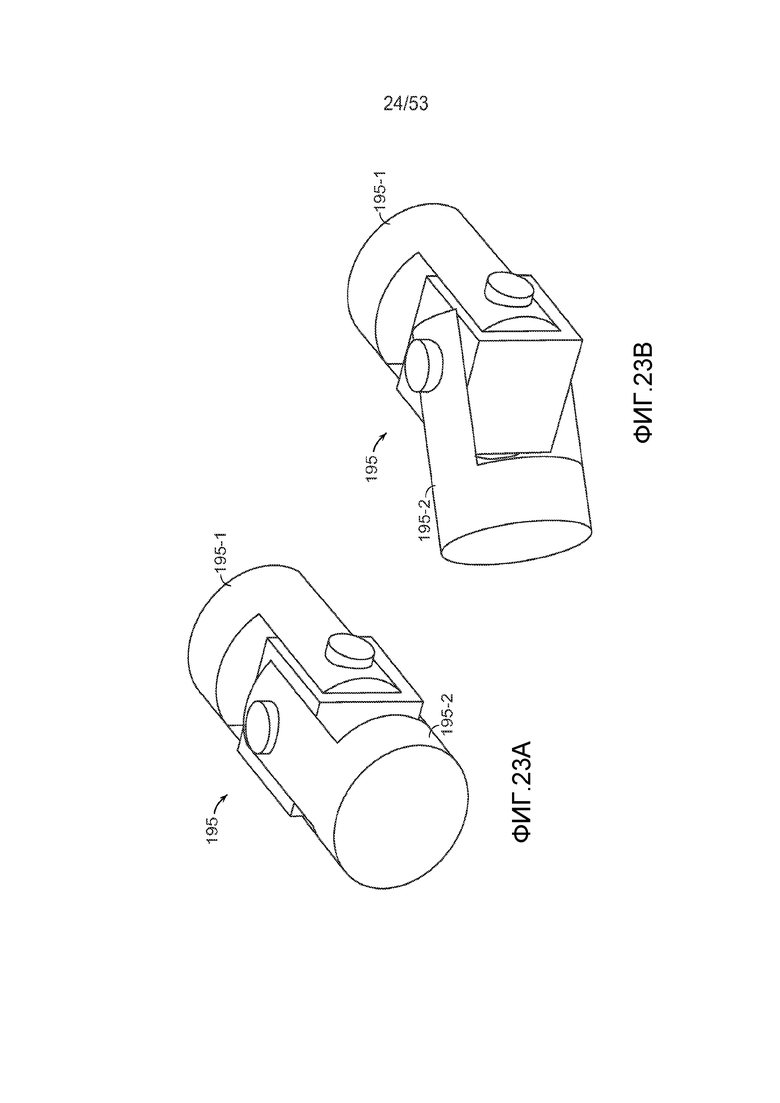
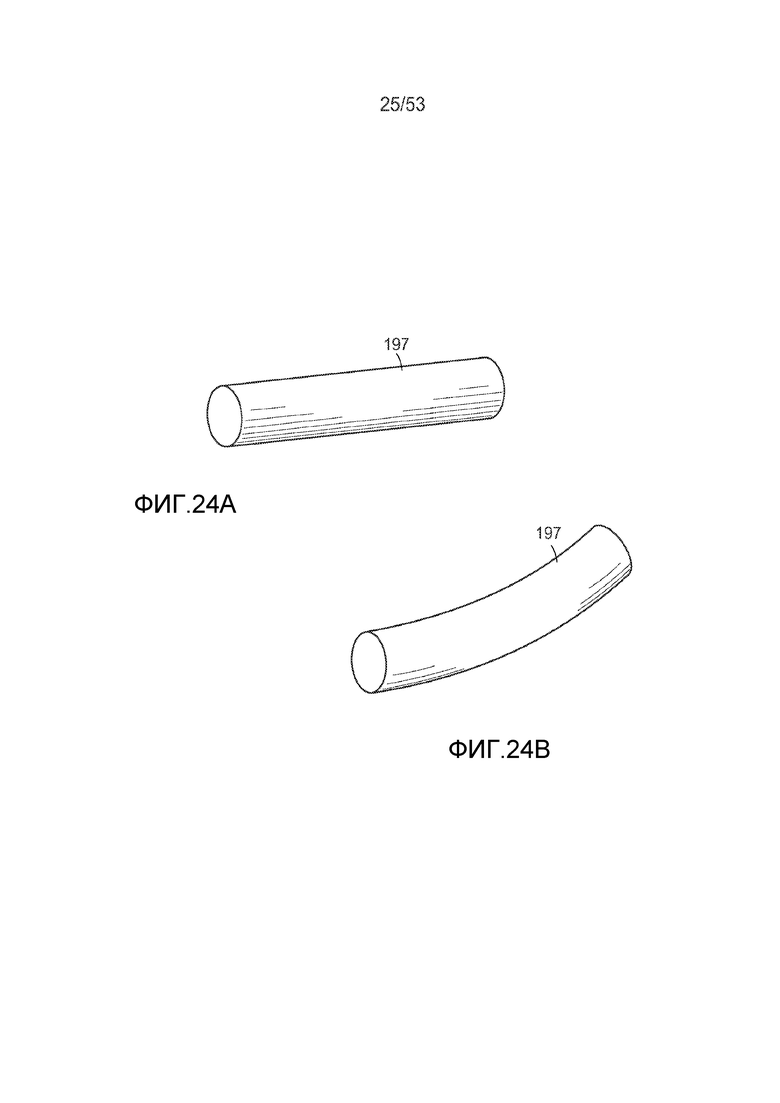
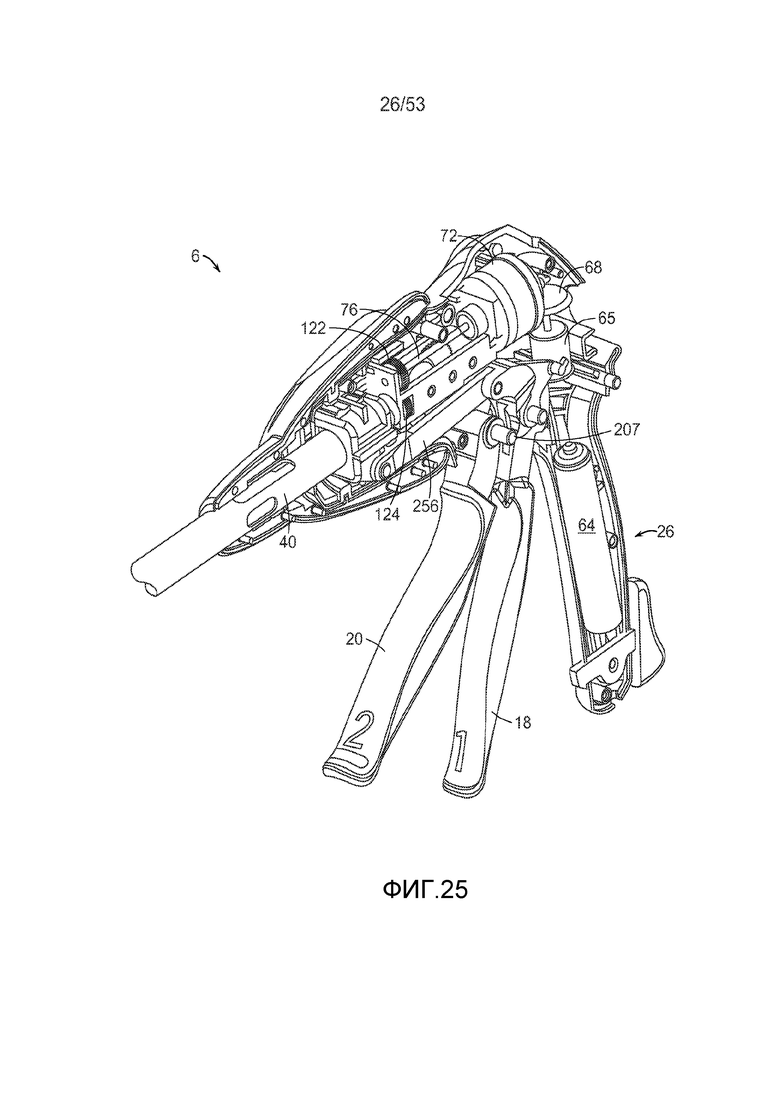
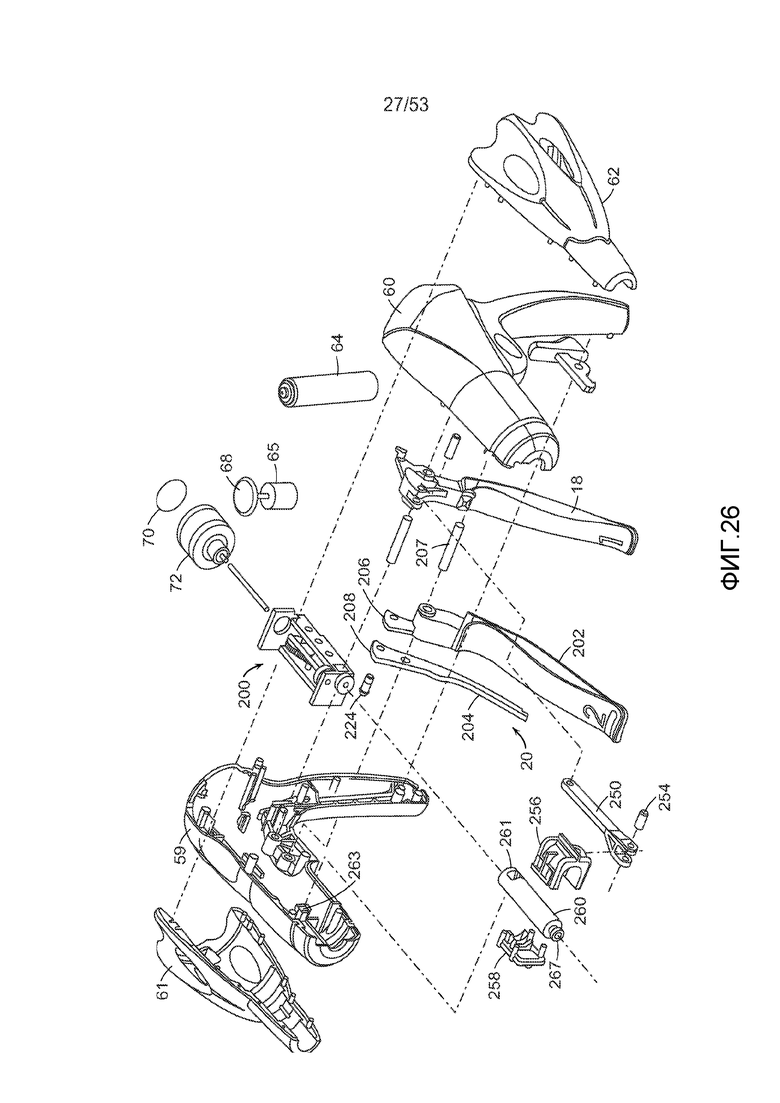
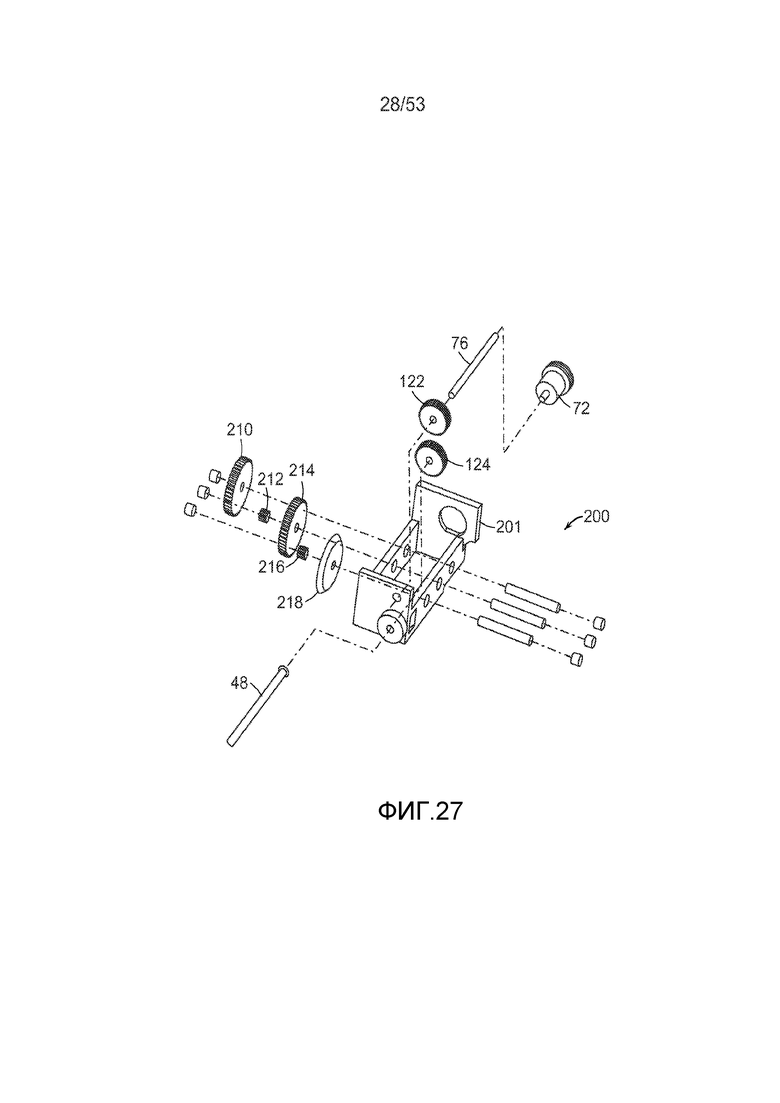
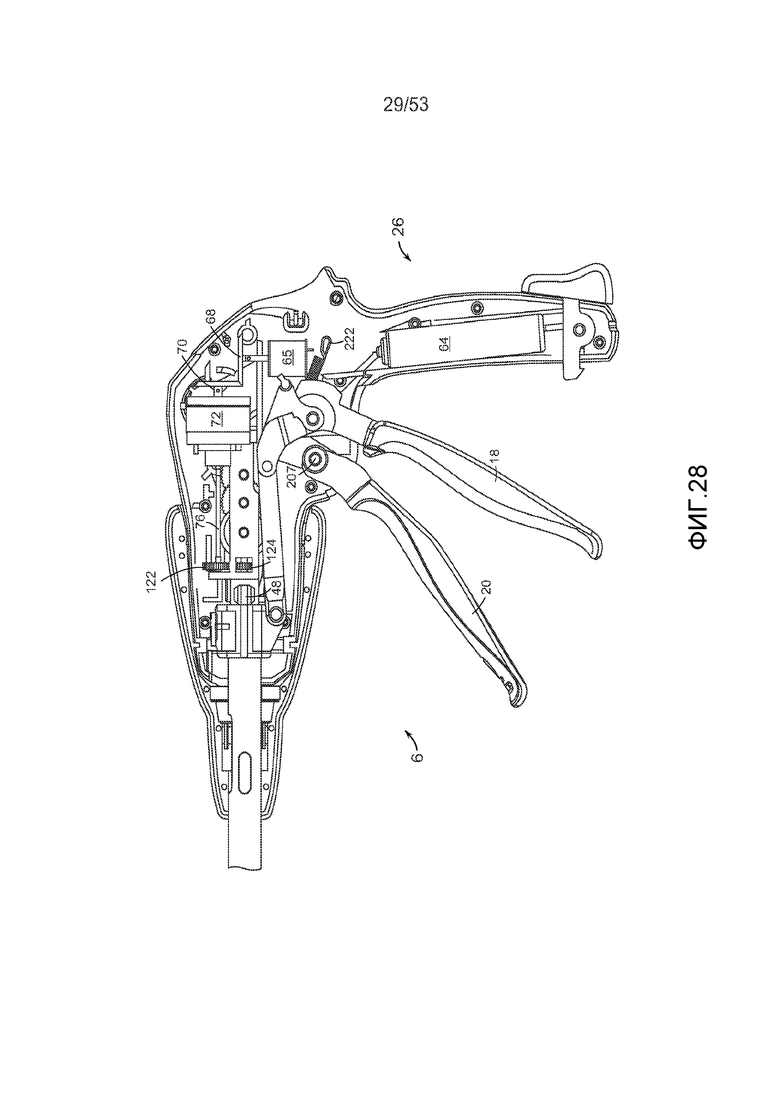
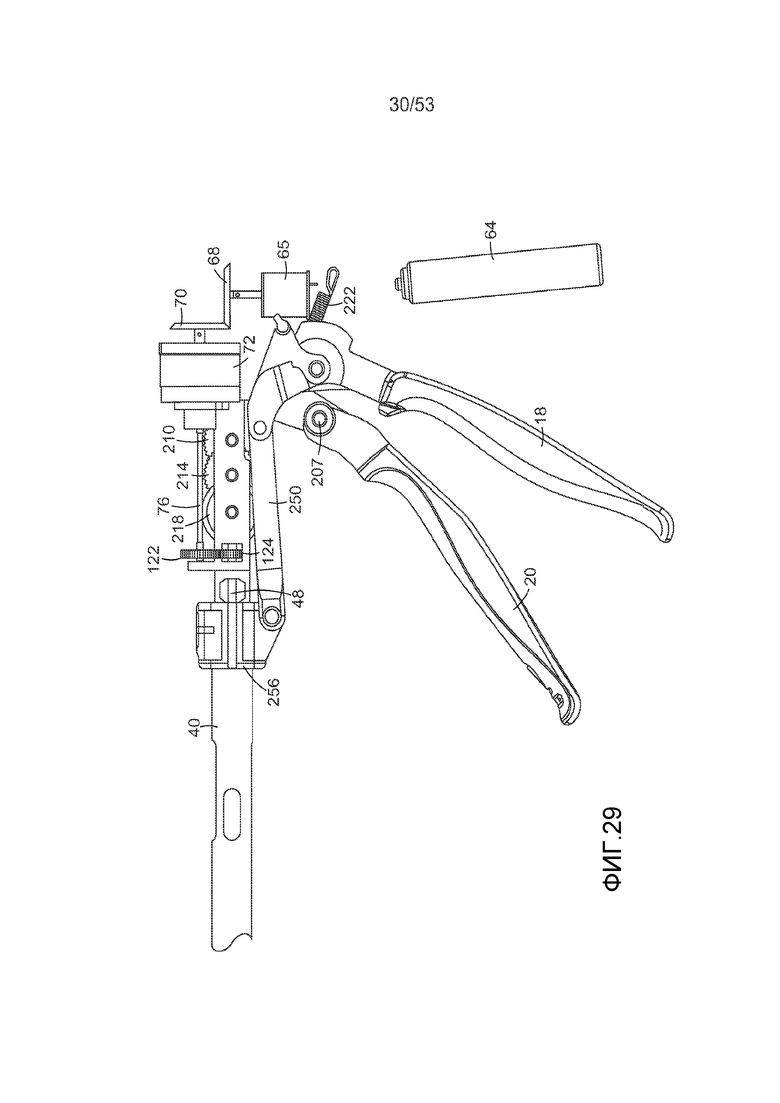

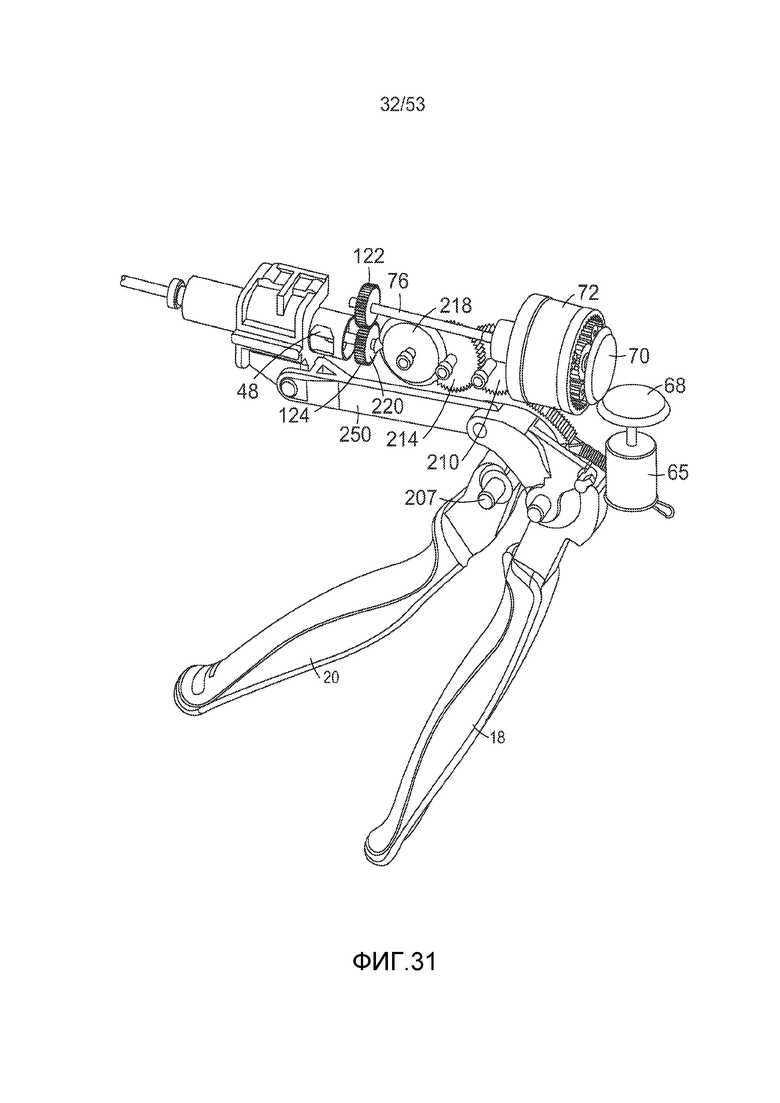
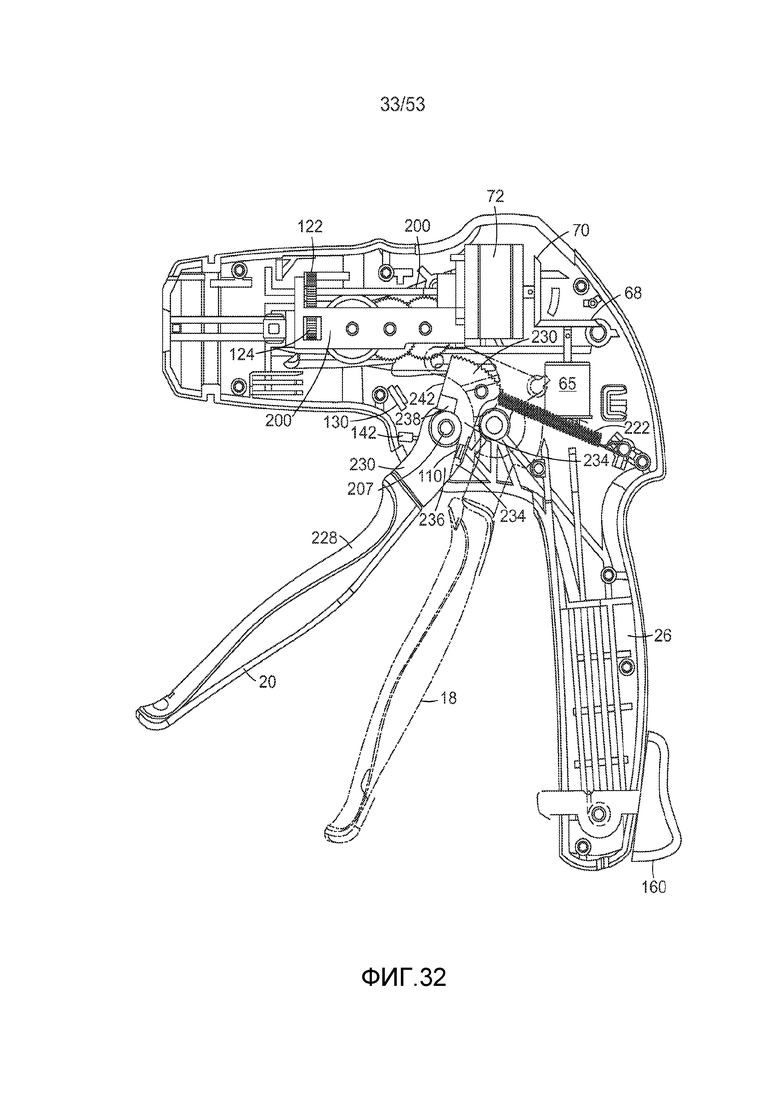
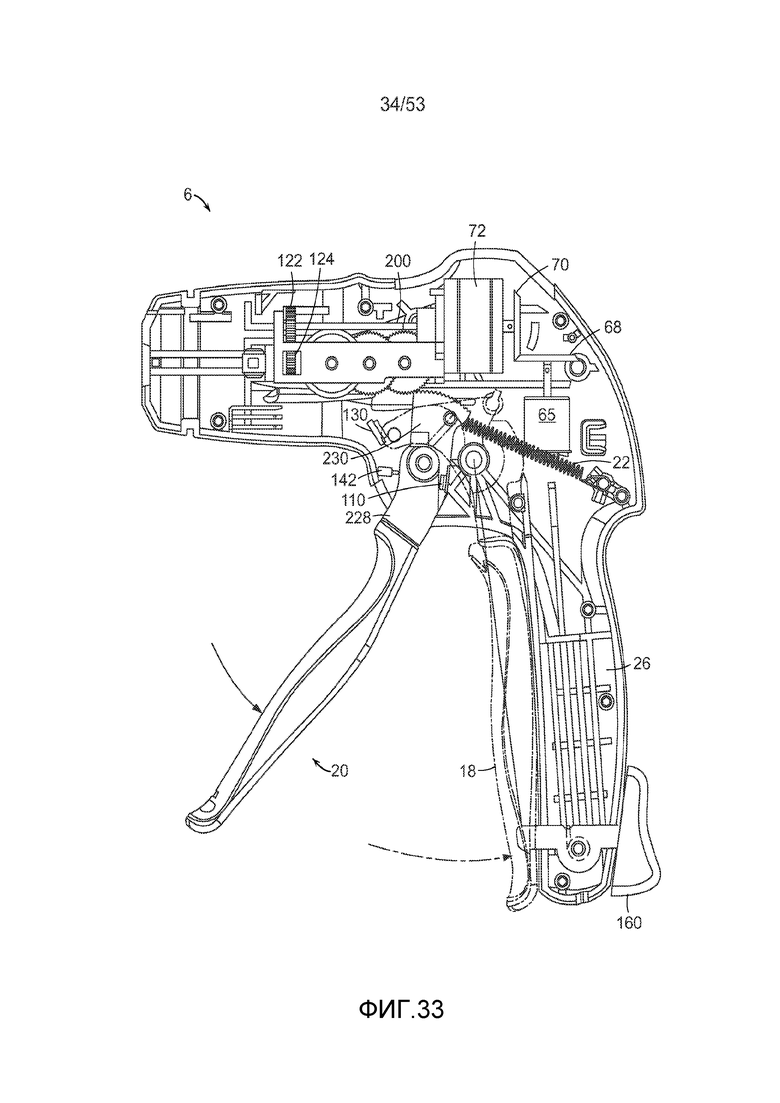
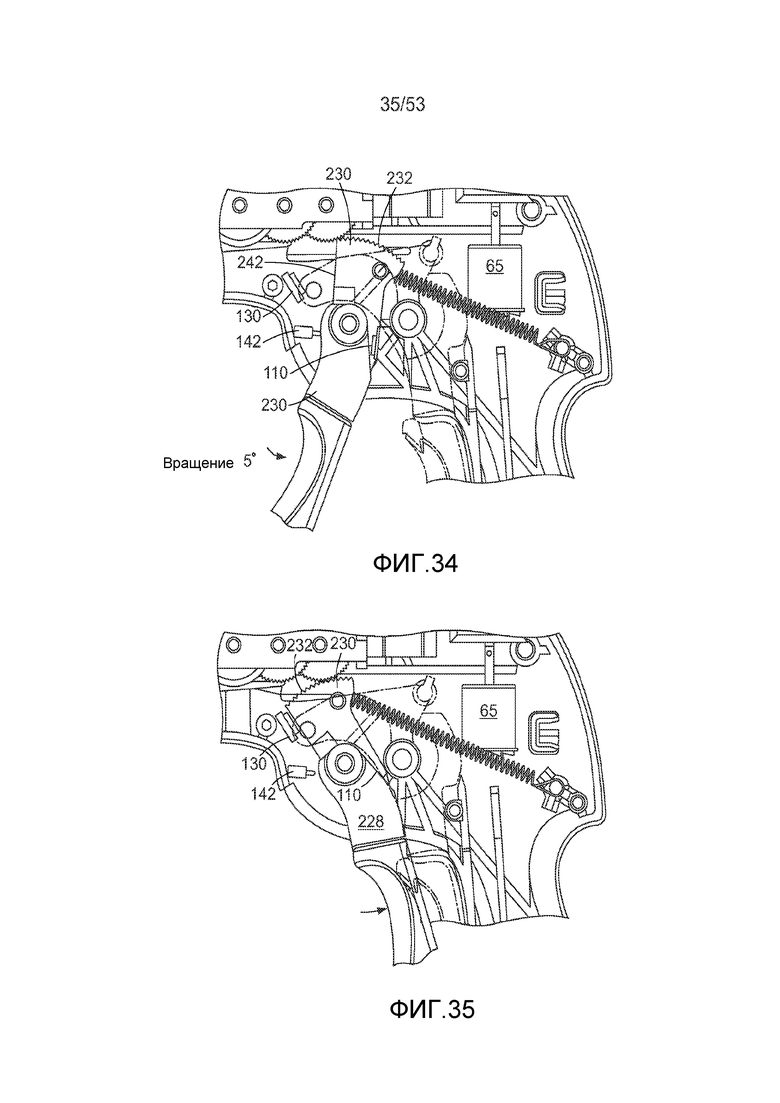
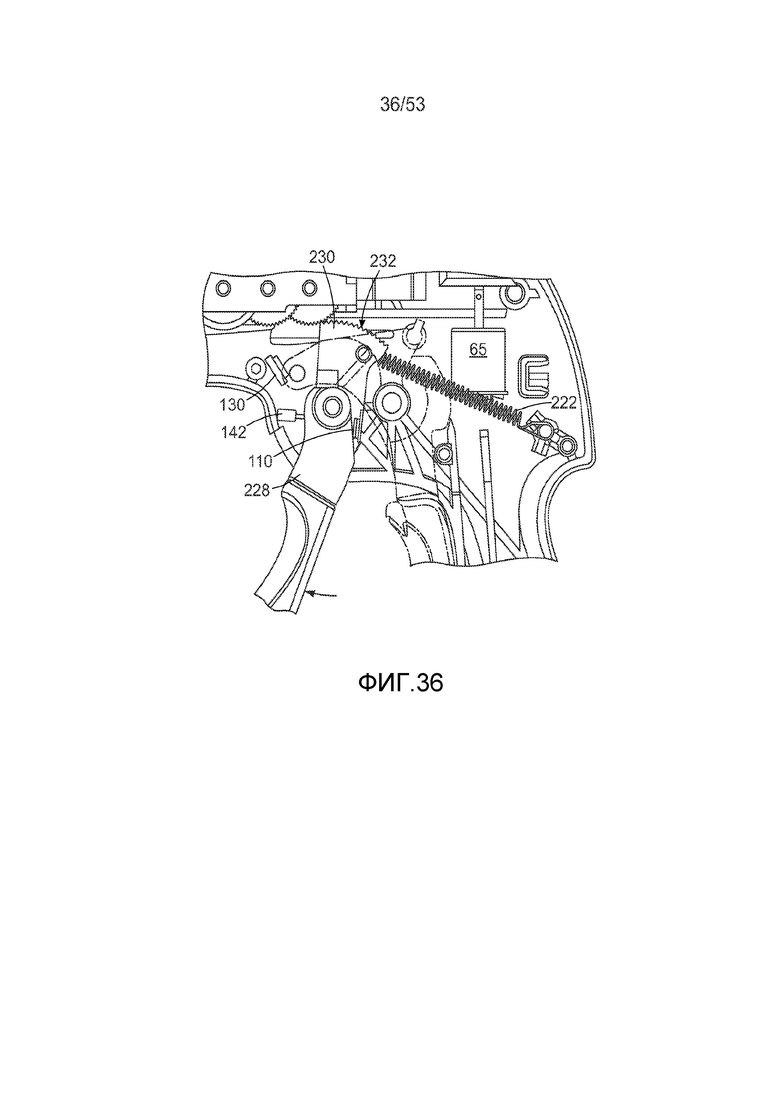
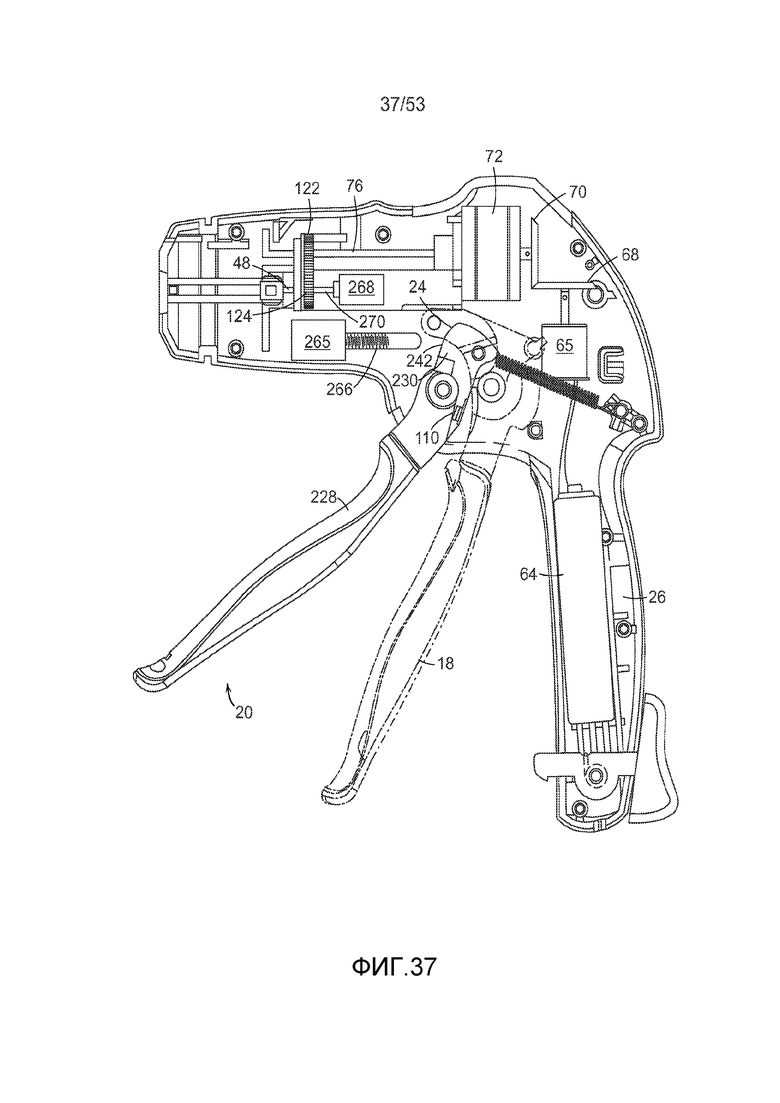
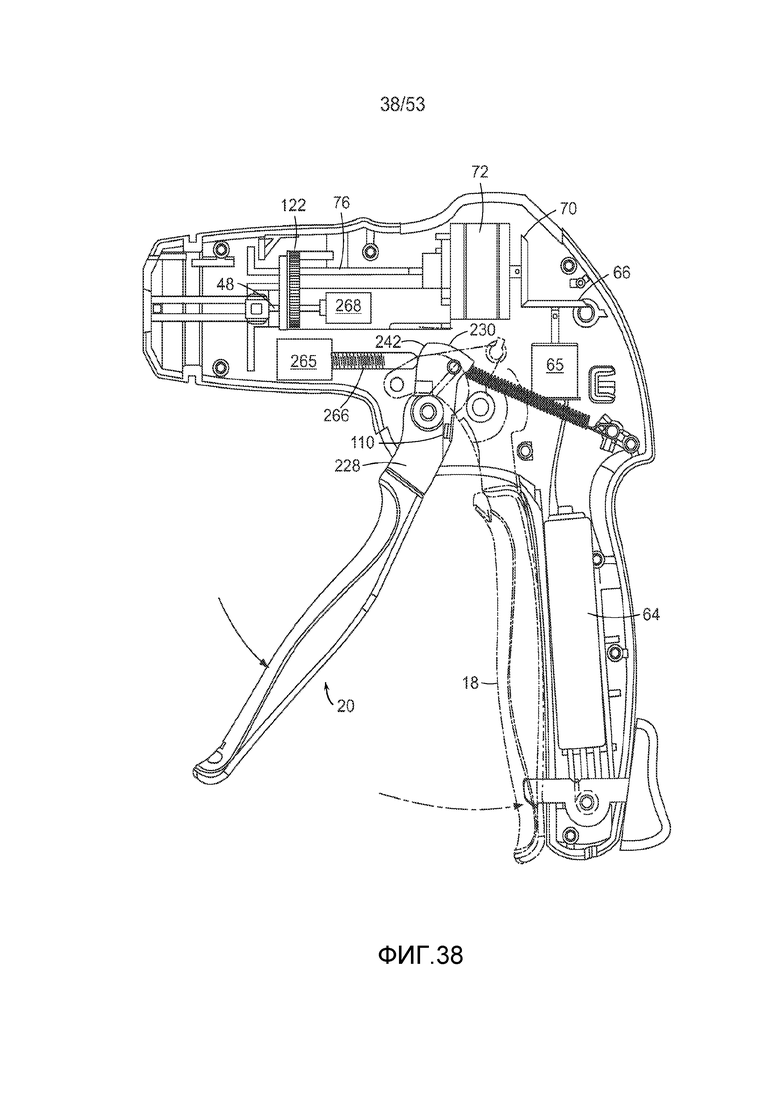
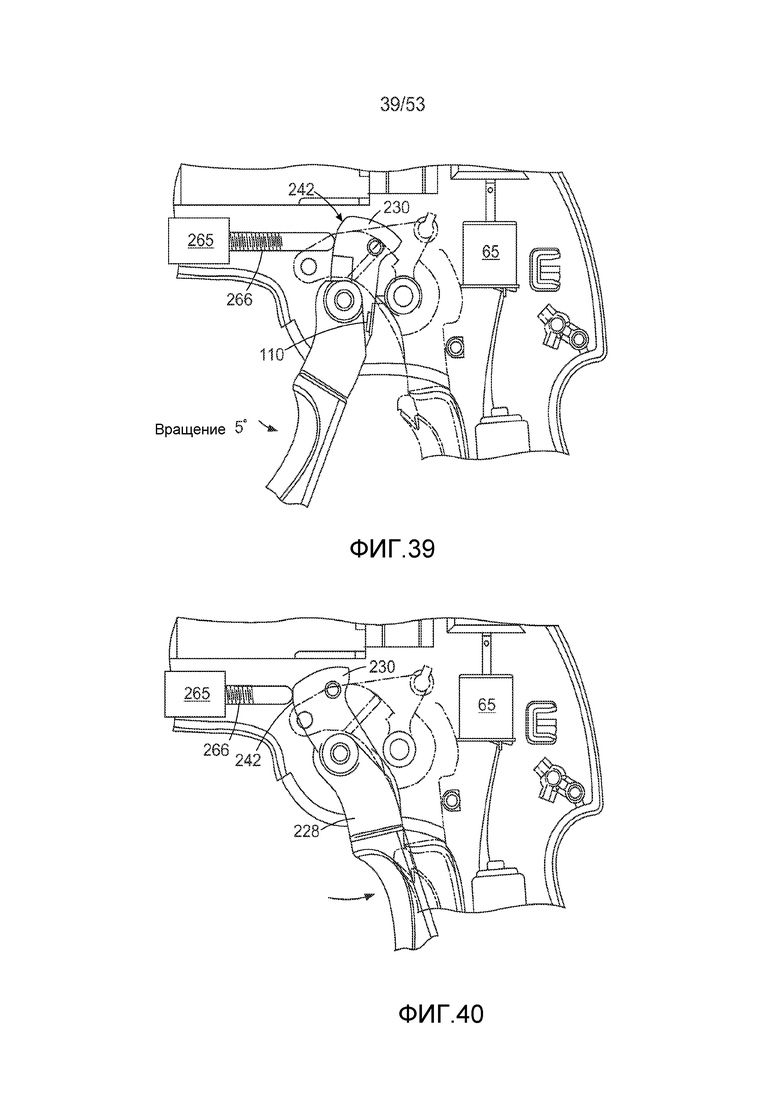
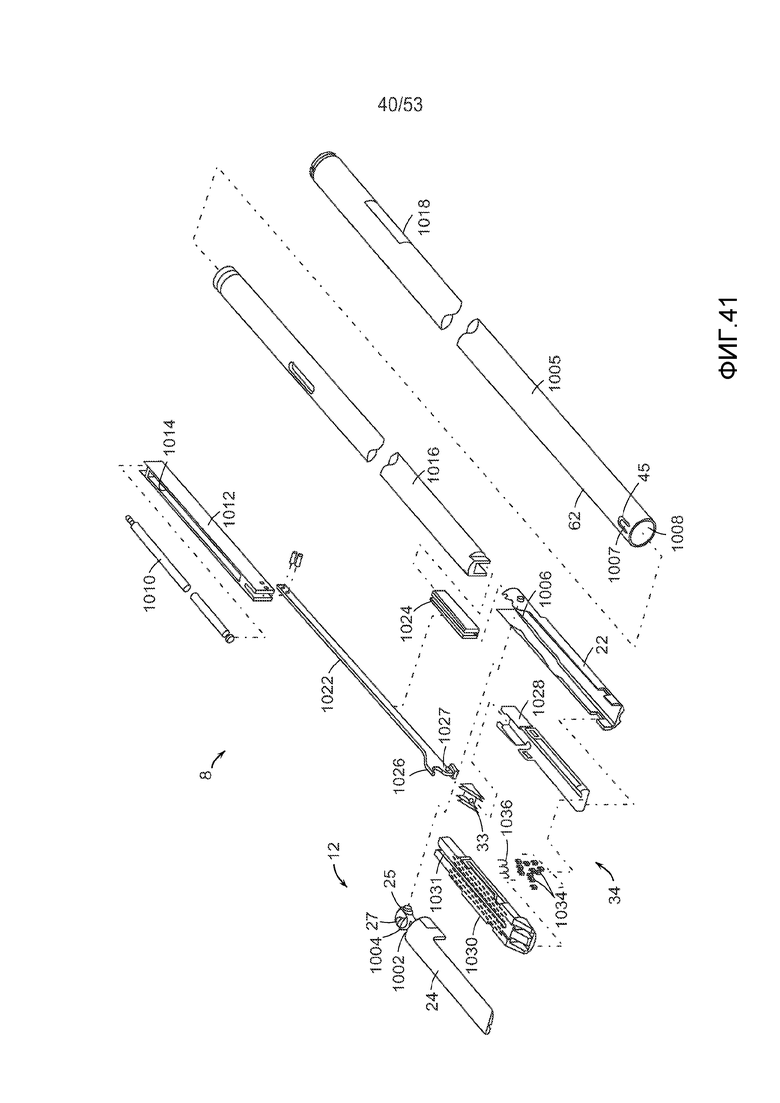
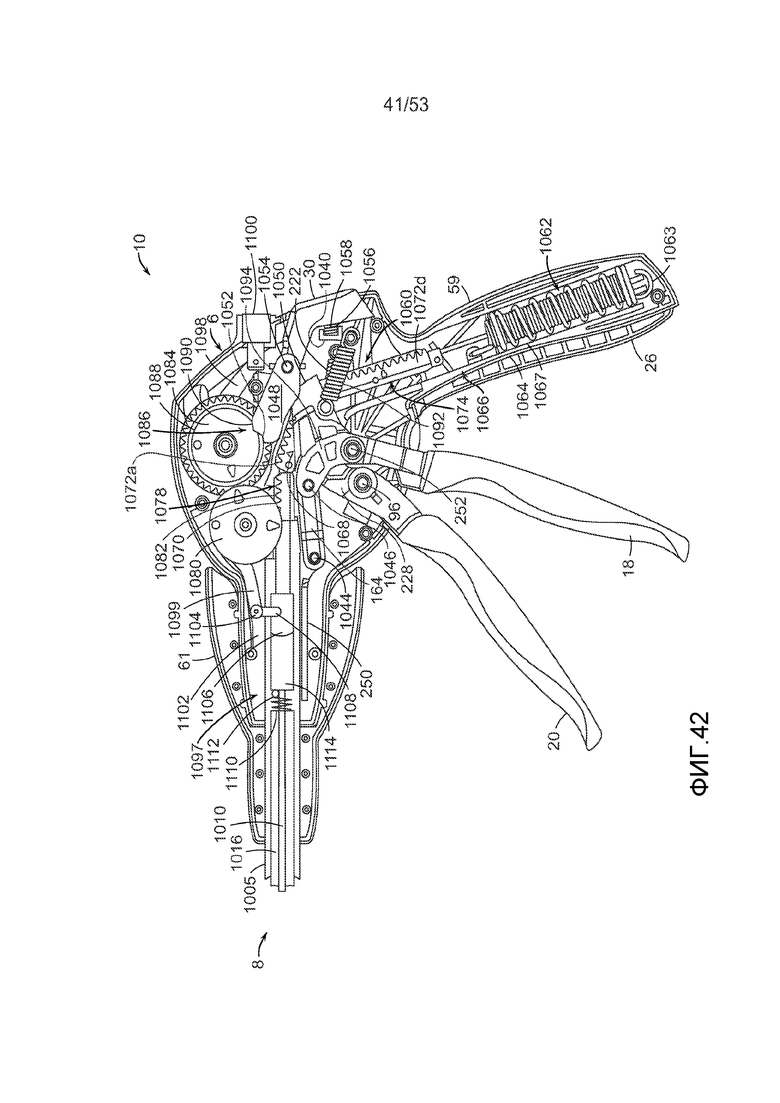
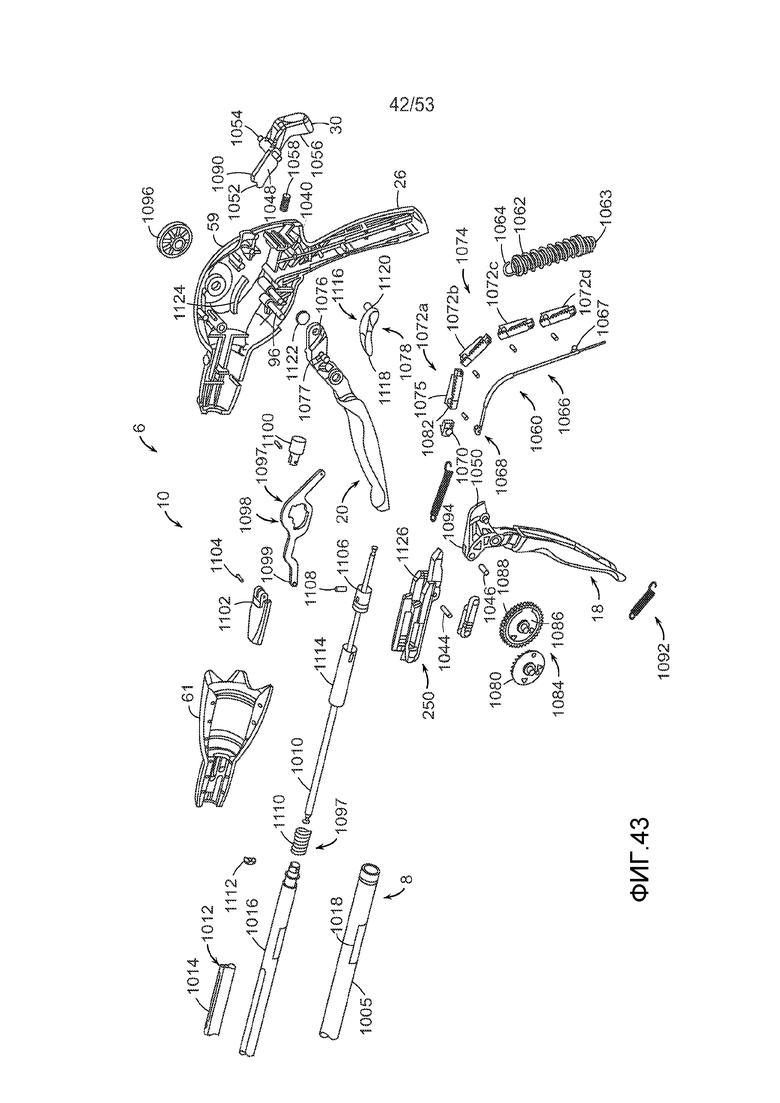
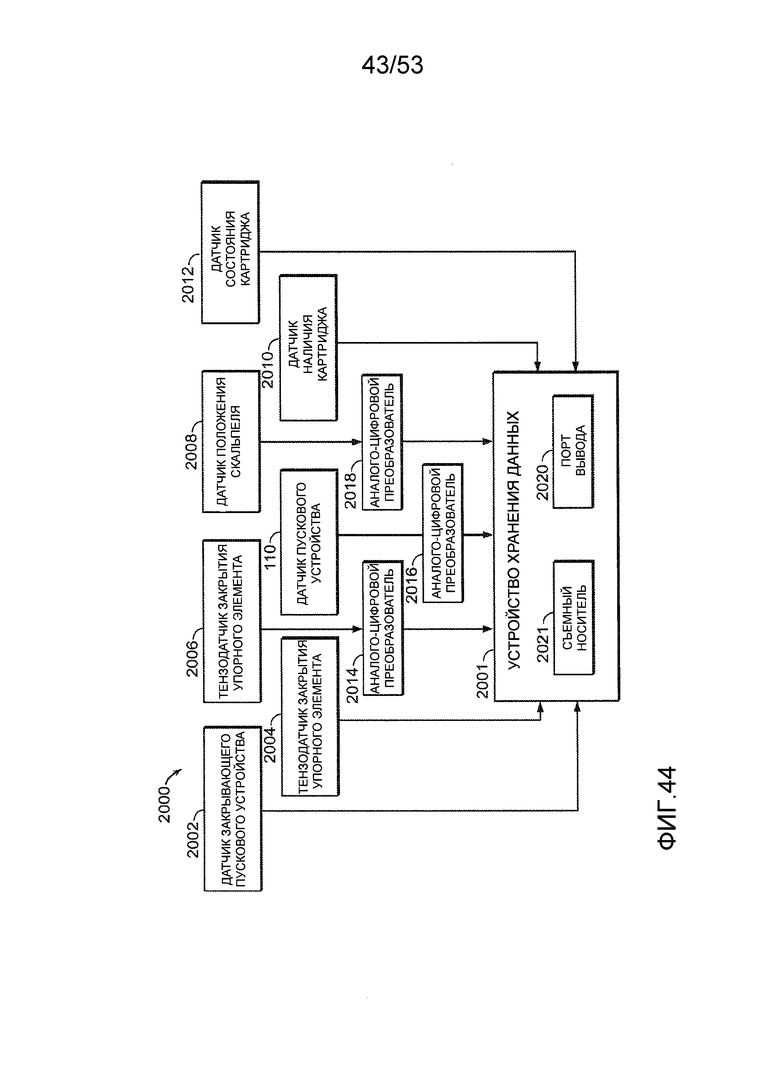
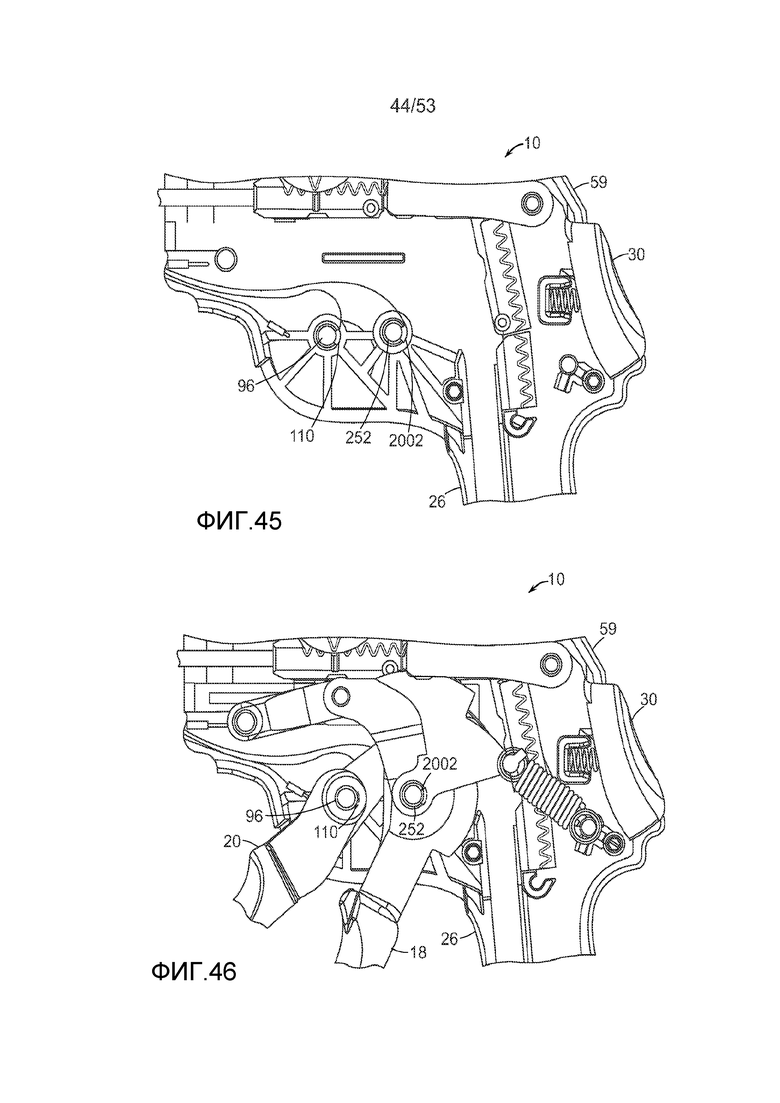
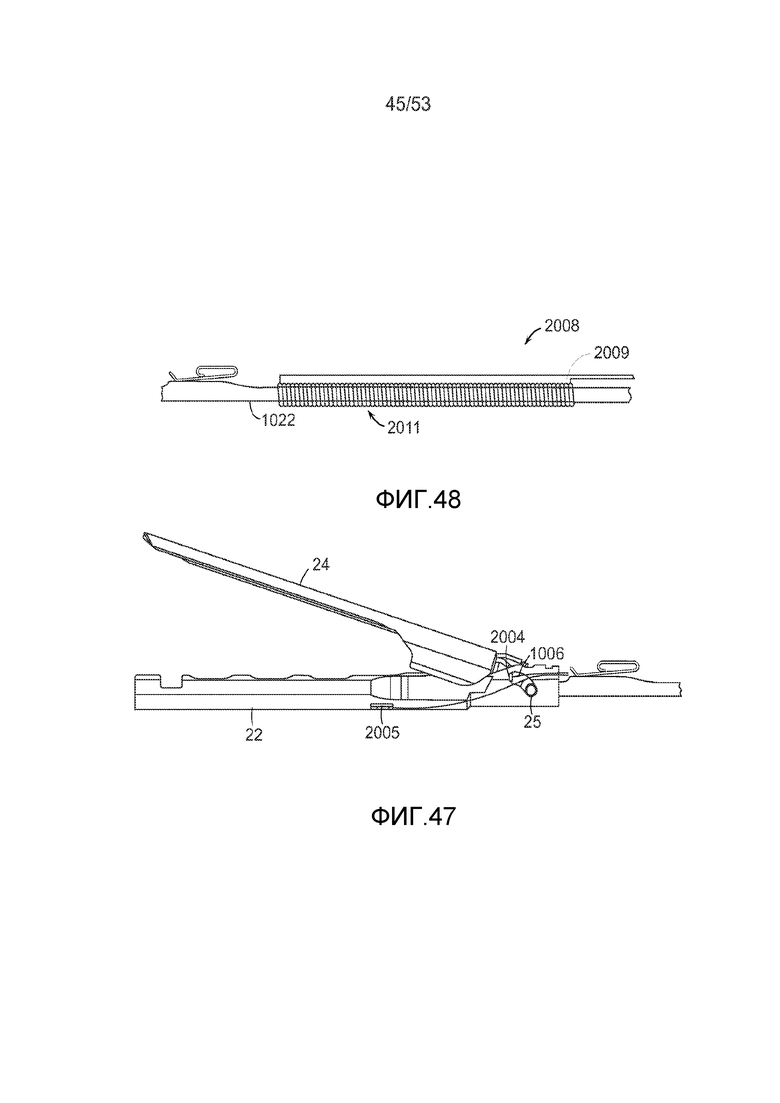
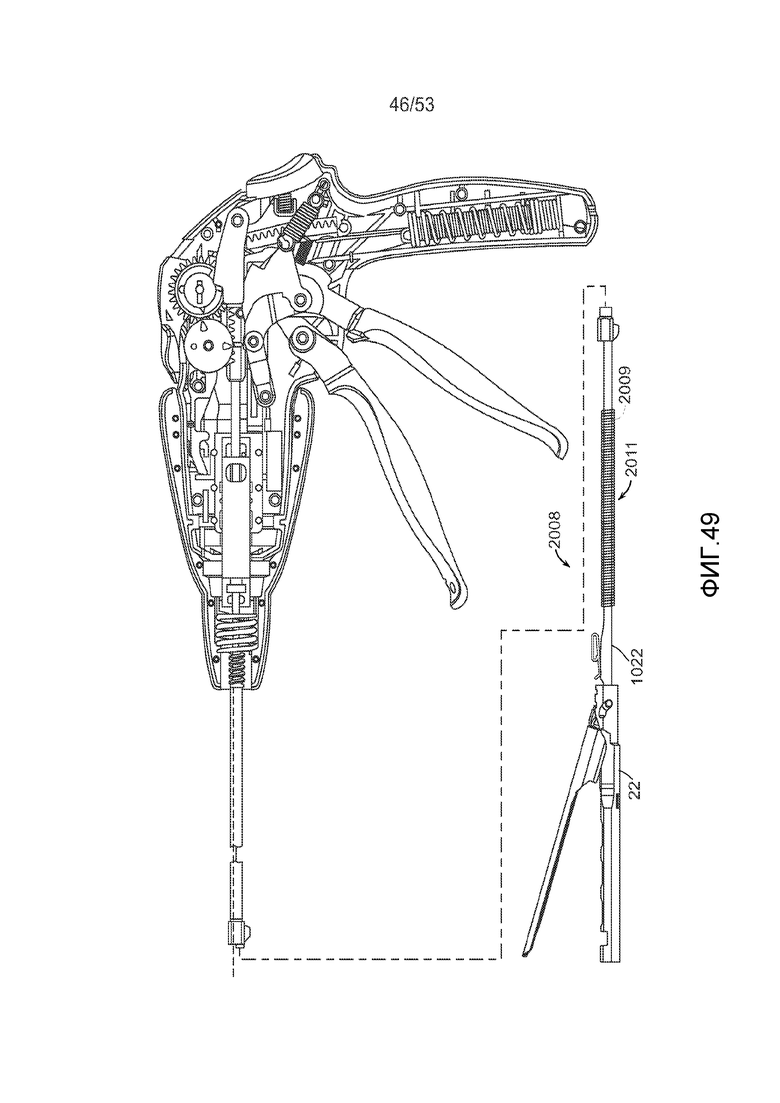
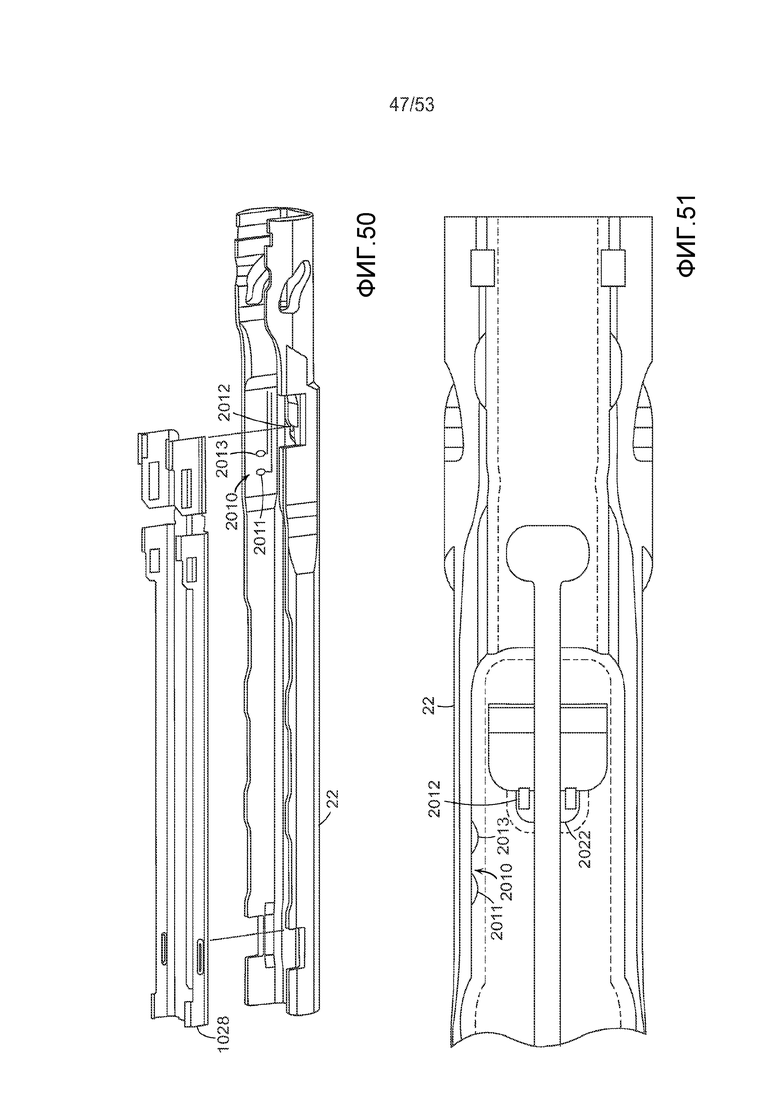
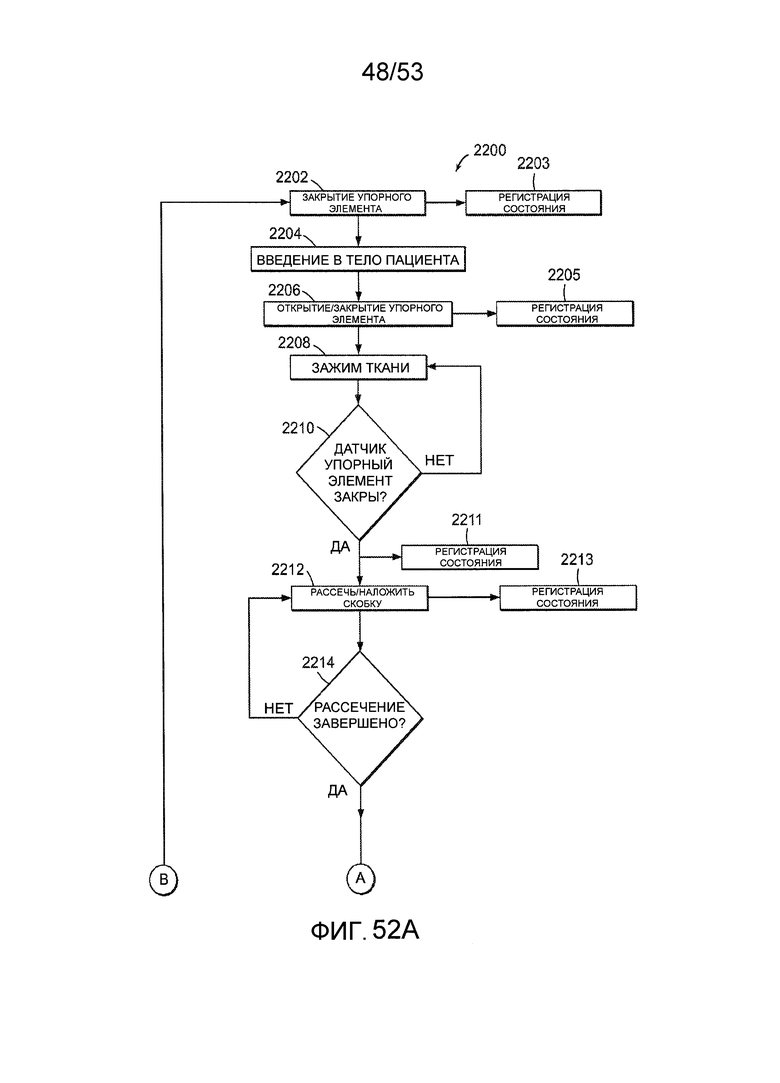
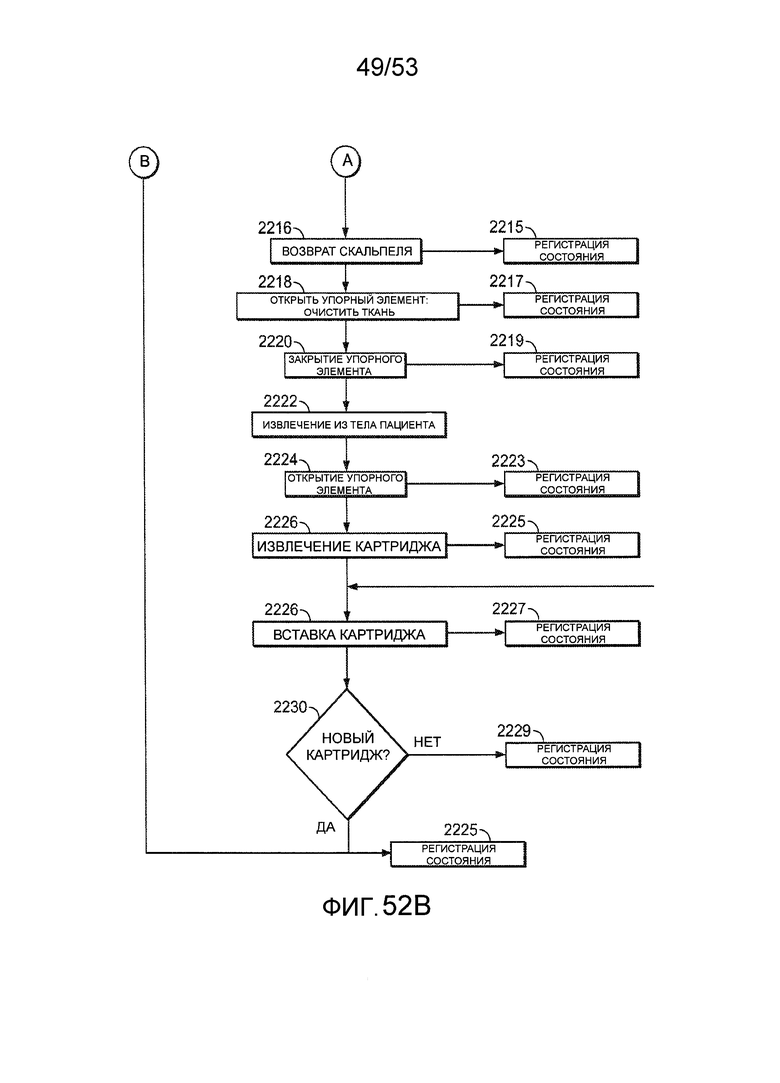
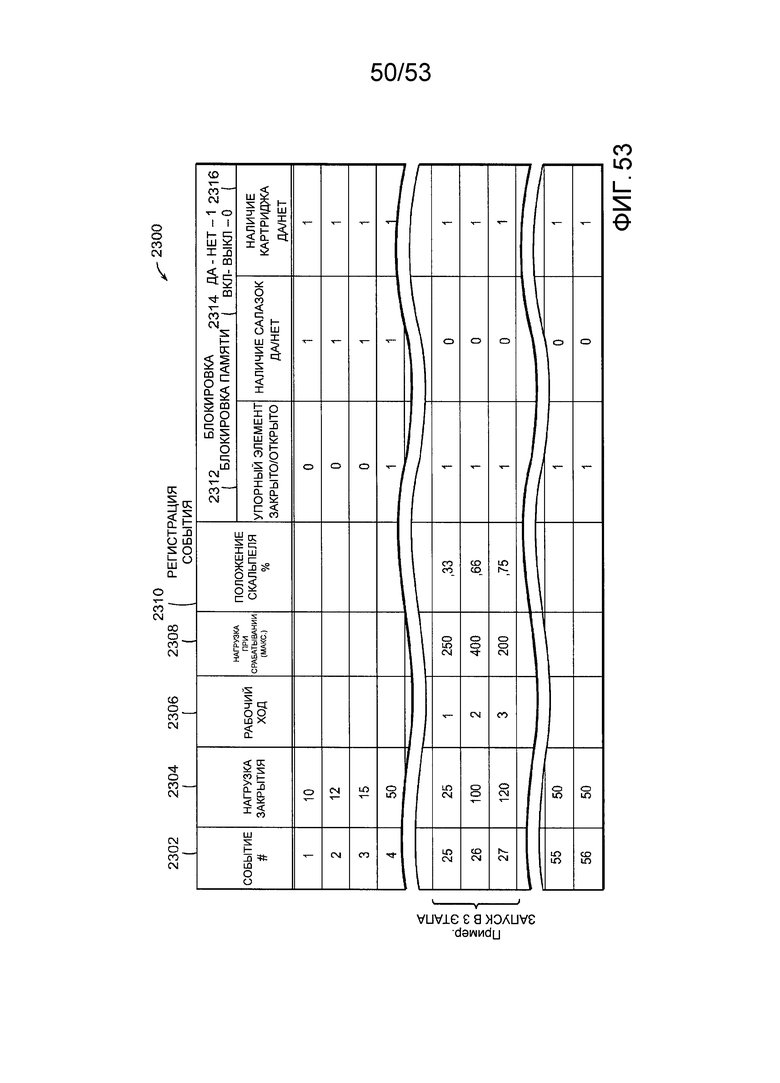
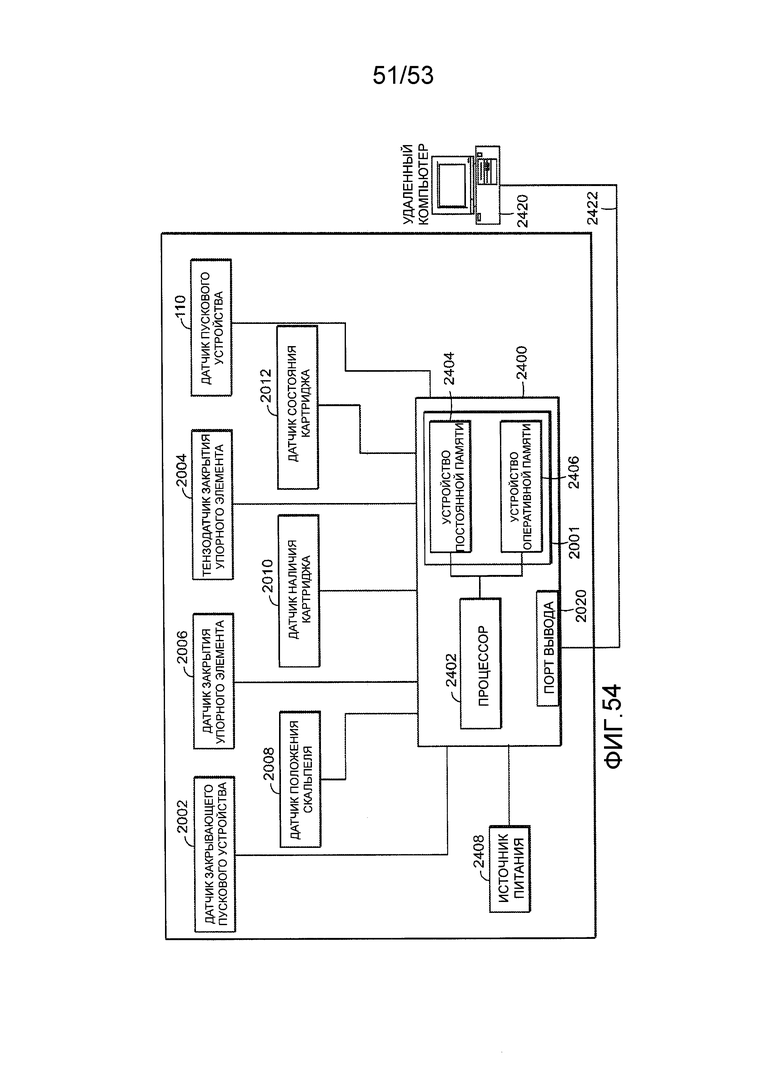
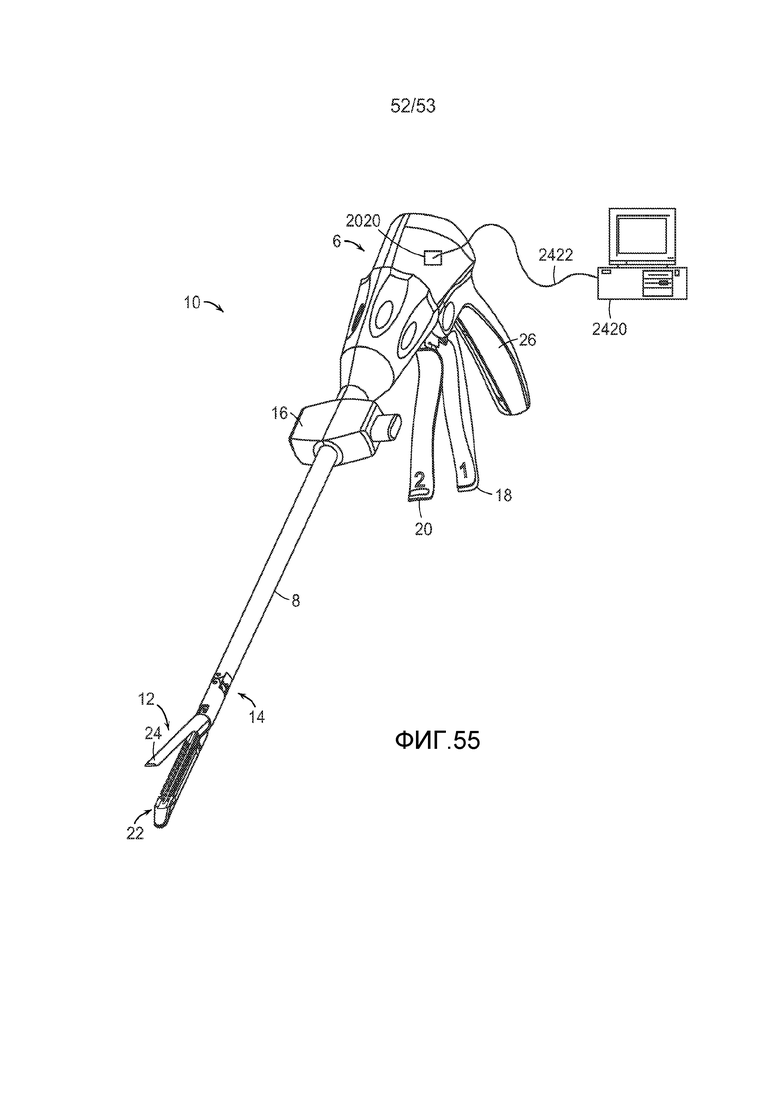
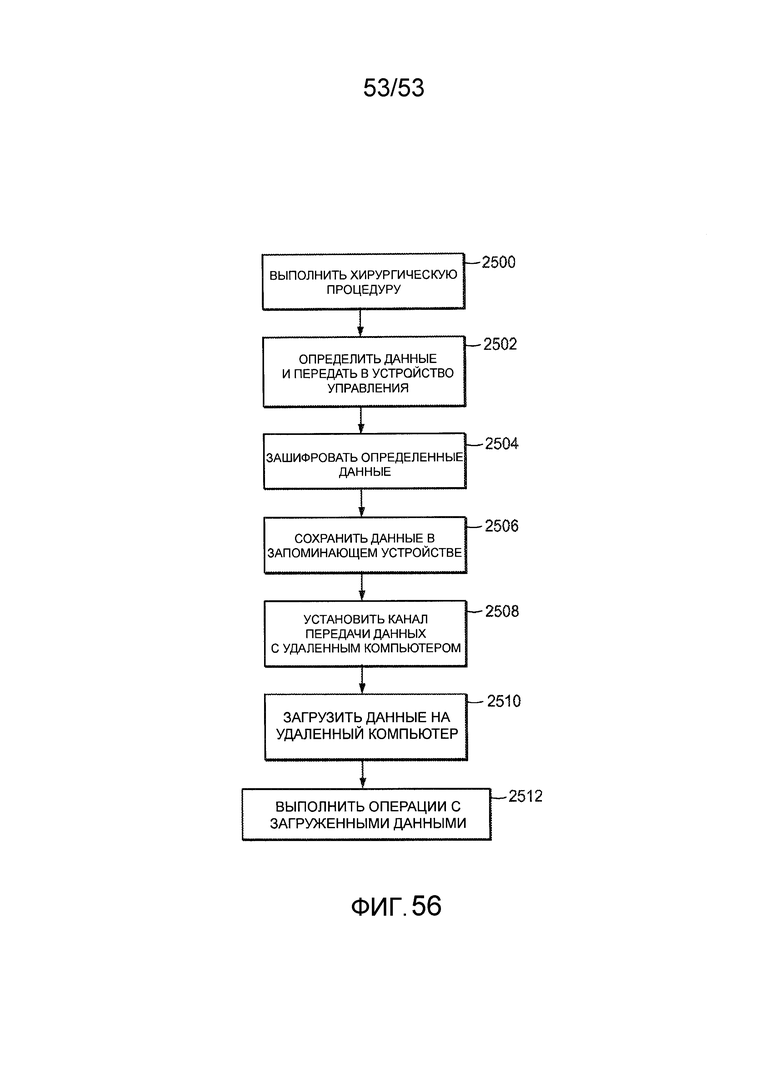
Изобретение относится к медицине и может быть использовано для загрузки данных датчика, хранимых в запоминающем устройстве режущего и сшивающего хирургического инструмента на внешний или удаленный компьютер. Способ и система загрузки данных датчика могут включать хранение данных от одного или более датчиков режущего и сшивающего хирургического инструмента в запоминающем устройстве устройства управления режущего и сшивающего хирургического инструмента во время хирургической процедуры с использованием режущего и сшивающего хирургического инструмента. Затем после хирургической процедуры устанавливают канал передачи данных между устройством управления и удаленным компьютером. После этого данные датчика могут быть загружены с устройства управления на удаленный компьютер. 56 ил.
Режущий и сшивающий хирургический инструмент, содержащий:
a. концевой зажим, содержащий упорный элемент с функцией формирования шовных скобок на нем, корпус, в общем расположенный напротив упорного элемента, предназначенный для размещения картриджа, и сменный картридж, содержащий шовные скобки, которые могут быть вытолкнуты из картриджа движением наружу клина введения, и по меньшей мере один датчик;
b. удлиненный вал, имеющий в нем двигатель, функционально связанный с механизмом приведения в действие, указанный вал имеет по меньшей мере одно шарнирное соединение для размещения картриджа под углом, а не параллельно продольной оси указанного вала;
c. электрически связанную консоль приведения в действие на дистанционном управлении;
d. линейный преобразователь движения привода для преобразования вращательного движения упомянутого двигателя в линейное движение.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7824401 B2, 02.11.2010 | |||
| Расходомер | 1991 |
|
SU1813201A3 |
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |

