Изобретение относится к области радиотехники, в частности к способам и технике радиотехнического мониторинга источников радиоизлучений (ИРИ) с ЛЧМ сигналами.
Известны следующие методы и способы измерения параметров сигналов с частотной модуляцией [Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001, с. 129-133]: с помощью неперестраиваемого и перестраиваемого радиоприемного устройства, функциональный метод, метод свертки спектра сигнала.
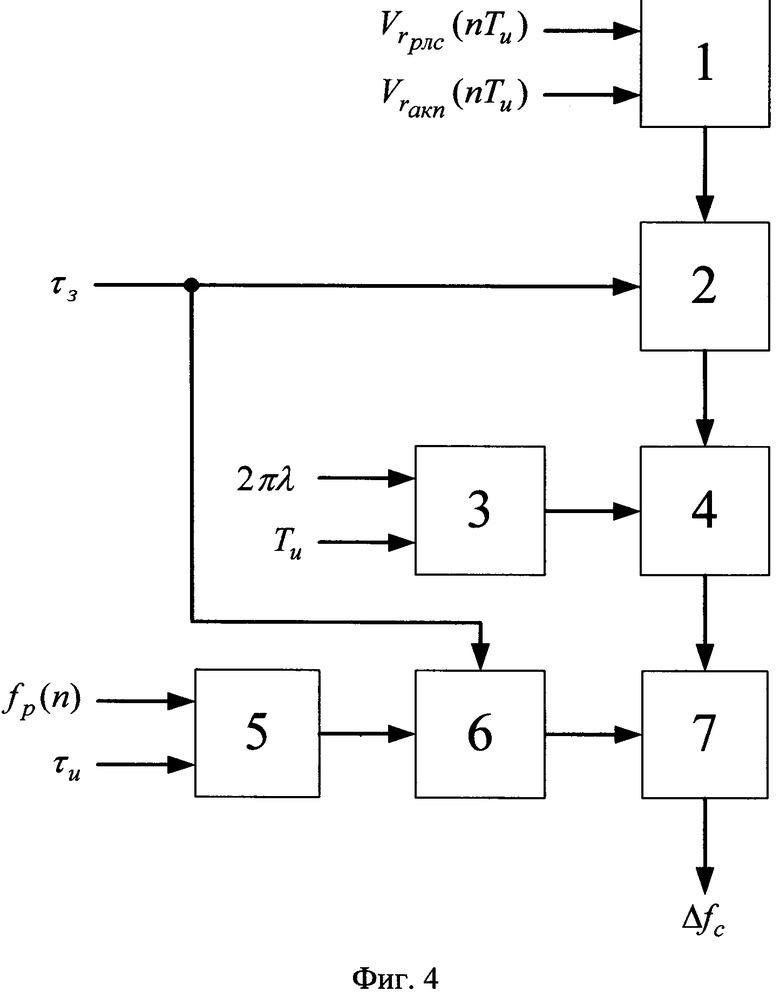
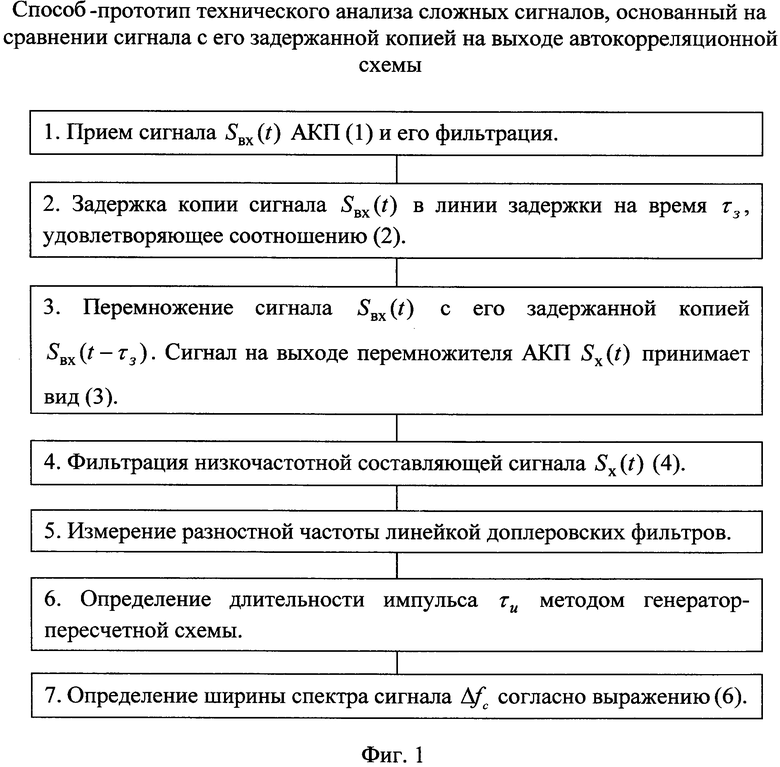
Наиболее близким по технической сущности (прототипом к предлагаемому изобретению) является метод технического анализа сложных сигналов в средствах радиотехнического мониторинга (РТМ), заключающийся в сравнении сигнала с его задержанной копией на выходе автокорреляционной схемы [Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001, с. 125-128], основанный на приеме сигнала автокорреляционным приемником (АКП), определении длительности импульса τu методом генератор-пересчетной схемы [Смирнов Ю.А. Радиотехническая разведка, - М.: Воениздат, 2001, с. 108-111] и определении ширины спектра сигнала Δfc согласно выражению (фиг. 1):

где fp - разностная частота сигнала на выходе АКП, τз - длительность задержки сигнала.
Недостатком устройства-прототипа является наличие большой ошибки в определении ширины спектра ЛЧМ сигналов Δfc в случае быстрого взаимного перемещения носителя ИРИ (например, космического аппарата (КА) с РЛС) и носителя АКП при определении параметров ЛЧМ сигналов.
Технический результат, на достижение которого направлено заявляемое изобретение, выражается в повышении точности определения ширины спектра ЛЧМ сигнала Δfc путем учета взаимного перемещения носителя ИРИ и носителя АКП.
Указанный технический результат достигается реализацией в цифровом виде процедур учета доплеровского смещения частоты принимаемого сигнала, обусловленного взаимным перемещением носителя ИРИ и носителя АКП.
Сущность способа заключается в том, что дополнительно определяют радиальные скорости движения носителей источника радиоизлучения и приемника, измеряют период следования и длину волны ЛЧМ импульсов и определяют ширину спектра ЛЧМ импульсов.
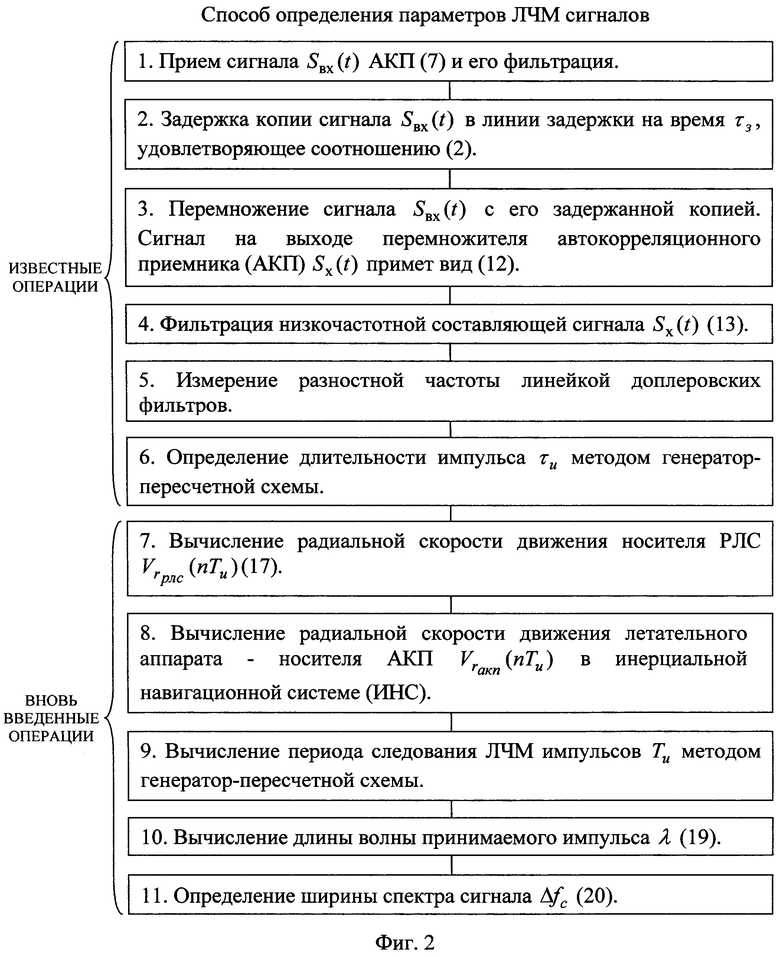
В предлагаемом способе выполняется следующая последовательность операций (фиг. 2):
1. Прием сигнала Sвх(t) АКП и его фильтрация. С учетом движения носителя ИРИ и носителя АКП ЛЧМ сигнал в общем виде опишем следующим образом:

где t∈[ts; ts+τu], 



где 
Причем, когда Δfc больше полосы фильтра, возможен вариант приема сигнала несколькими фильтрами. Тогда ширина спектра сигнала будет оцениваться следующим образом:

где n - номер фильтра.
2. Задержка копии сигнала Sвх(t) в линии задержки на время τз.
3. Перемножение сигнала Sвх(t) с его задержанной копией Sвх(t-τз). Сигнал на выходе перемножителя АКП Sx(t) принимает вид:
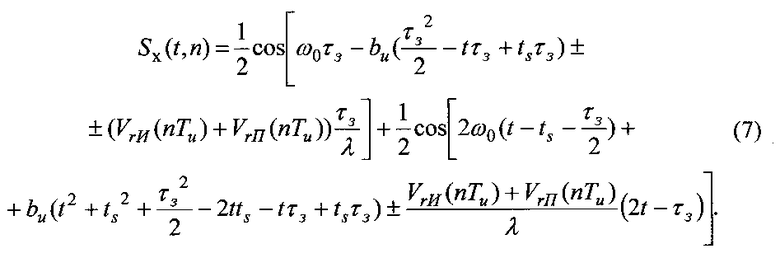
4. Фильтрация низкочастотной составляющей сигнала Sx(t):

Сигнал Sнч(t,n) будет иметь дополнительный набег фазы от импульса к импульсу при условии, что VrИ и VrП изменяются.
5. Измерение разностной частоты линейкой доплеровских фильтров. Из выражения (8) с учетом (3)-(5) разностная частота fp(n) и фаза принятого зондирующего импульса φ(Tu) в случае взаимного встречного (или противоположно направленного) движения носителя ИРИ и(или) носителя АКП зависят от VnИ, VrП, Tu, λ:


где

6. Определение длительности импульса τu, например, методом генератор-пересчетной схемы [Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001, с. 108-111].
7. Вычисление радиальной скорости движения носителя ИРИ VrИ(nTu)

где ρИ - радиус-вектор носителя ИРИ, VИ - вектор скорости носителя ИРИ, |ρИ| - дистанция между носителем ИРИ и носителем АКП.
Модуль вектора скорости движения носителя РЛС |VИ| может быть рассчитан следующим образом:

где fгр - гравитационная постоянная, МЗ - масса Земли, RЗ - радиус Земли, h - высота полета КА РЛС.
Например, можно определять радиальную скорость космического аппарата (КА) - носителя РЛС на основе данных орбитальной модели SGP4 [Hoots F.R., Roehrich R.L. SpaceTrack Report #3. [Электронный ресурс]], которая позволяет осуществить предсказание орбитального положения КА.
8. Определение радиальной скорости движения носителя АКП VrП(nTu) в инерциальной навигационной системе (ИНС) [П.В. Бромберг. Теория инерциальных систем навигации. - М.: Наука, 1979, с. 71-122].
9. Определение периода следования ЛЧМ импульсов Tu, например, методом генератор-пересчетной схемы [Смирнов Ю.А. Радиотехническая разведка. - М.: Воениздат, 2001, с. 108-111].
10. Определение средней длины волны принимаемого импульса λ. Средняя длина волны λ рассчитывается следующим образом:

где c - скорость света, fcp - средняя частота спектра сигнала, определяемая как центральная частота высокочастотного фильтра на входе приемника.
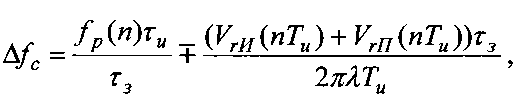
11. Определение ширины спектра сигнала Δfc согласно выражению

Таким образом, в предлагаемом способе определения параметров ЛЧМ сигналов новыми существенными признаками изобретения являются вновь введенные процедуры 7-11.
Способ может быть реализован, например, с помощью автокорреляционного приемника с элементами цифровой обработки сигналов. Оцифровка сигнала может осуществляться как на частоте сигнала f0, так и на разностной частоте fP. Наиболее предпочтительным является вариант оцифровки на разностной частоте fp, так как для этого могут быть применены сравнительно простой аналого-цифровой преобразователь (АЦП) с частотой дискретизации до десятков МГц и программируемая логическая интегральная схема (ПЛИС) с меньшим количеством вентилей, реализующая цифровую доплеровскую фильтрацию сигналов.
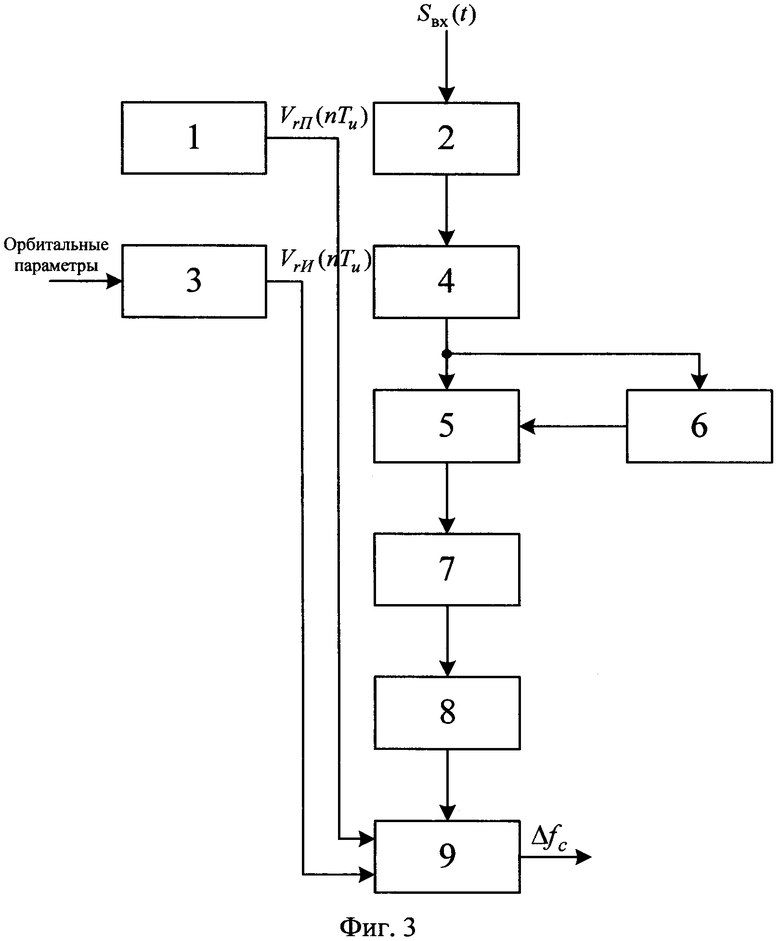
На фиг. 3 изображена структурная схема предлагаемого способа, состоящая из ИНС 1, полосового фильтра высоких частот 2, вычислительного устройства №13, ответвителя 4, умножителя 5, линии задержки 6, полосового фильтра низких частот 7, АЦП 8, вычислительного устройства №29, реализующего алгоритм вычисления согласно выражению (20).
Определим влияние движения носителя АКП на точность определения разностной частоты в РЛС космического базирования. Исходя из условий однозначности по азимуту имеют место следующие ограничения на период следования зондирующих импульсов РЛС [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для ВУЗов./Под ред. Г.С.Кондратенкова. - М.: «Радиотехника», 2005, с. 122-134]:

где Δl - разрешающая способность РЛС по азимуту.
При малом аргументе tg(λ/4Δl) получим следующее выражение:

Тогда с учетом выражений (9) и (17) получим:

Полоса пропускания цифрового доплеровского фильтра при условии 

а измеренная разностная частота:

С использованием выражения (20) при условии движения носителя РЛС и носителя АКП навстречу друг другу (или в противоположные стороны) проведен расчет зависимости разностной частоты fp(n) от разрешающей способности по азимуту Δl для различных диапазонов частот (9,5 ГГц, 36 ГГц) при τu=20; 100 мкс и ширине спектра зондирующего импульса Δfс=2; 15 МГц. При изменении разрешающей способности по азимуту Δl от 0,5 м до 10 м (для Δfc=15 МГц до 75 м) разностная частота fp(n) изменяется в пределах 200 Гц. Из выражения (19) следует, что полоса пропускания доплеровского фильтра Δfнч изменяется от 100 Гц до 750 Гц и, следовательно, изменение разностной частоты fp(n) оказывает влияние на точность определения Δfc особенно при значениях Δfc меньше чем 4 МГц. Следовательно, в данном случае необходимо учитывать взаимное перемещение носителя РЛС и носителя АКП при обработке сигналов.
Предложенное техническое решение является новым, поскольку из общедоступных сведений неизвестны способы, позволяющие определять параметры ЛЧМ сигналов при помощи автокорреляционного приемника с элементами цифровой обработки сигналов при наличии доплеровского смещения их частоты.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы стандартные радиоэлектронные устройства и средства. Расчет переменных выражения (15) может выполняться, например, в сигнальном процессоре ADSP-2181 путем реализации типовых ассемблерных процедур среды разработки Visual DSP++ (суммирования (процедуры 1 и 7 на фиг. 4), умножения (процедуры 2, 3 и 5 на фиг. 4) и деления (процедуры 4 и 6 на фиг. 4)) [Вальпа О.Д. Разработка устройств на основе цифровых сигнальных процессоров фирмы Analog Devices с использованием Visual DSP++. - М.: Горячая линия. - Телеком, 2007, стр. 266].
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2014 |
|
RU2605205C2 |
| СПОСОБ ОБРАБОТКИ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ МНОГОКАНАЛЬНЫМ АВТОКОРРЕЛЯЦИОННЫМ ПРИЕМНИКОМ | 2018 |
|
RU2698579C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ АНАЛИЗА СЛОЖНЫХ СИГНАЛОВ В АВТОКОРРЕЛЯЦИОННОМ ПРИЕМНИКЕ | 2018 |
|
RU2726937C2 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВИДОВ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ В АВТОКОРРЕЛЯЦИОННОМ ПРИЕМНИКЕ | 2018 |
|
RU2683791C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2018 |
|
RU2699240C1 |
| Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике | 2019 |
|
RU2726221C1 |
| Способ определения параметров частотно-кодированных сигналов в автокорреляционном приемнике | 2019 |
|
RU2726188C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ ПО РЕЗУЛЬТАТАМ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ СИГНАЛАМИ С ЛЧМ | 2013 |
|
RU2535243C2 |
Изобретение относится к области радиотехники, в частности к способам и технике радиотехнического мониторинга источников радиоизлучений (ИРИ) с линейно-частотно-модулированными (ЛЧМ) сигналами. Достигаемый технический результат - повышение точности определения ширины спектра ЛЧМ сигнала путем учета взаимного перемещения носителя ИРИ и носителя автокорреляционного приемника (АКП). Указанный технический результат достигается за счет определения радиальных скоростей движения носителей источника радиоизлучения и приемника, средней длины волны ЛЧМ сигналов, измерения периода следования ЛЧМ сигналов и определения ширины спектра ЛЧМ сигналов по формуле:

где fp(n) - разностная частота сигнала на выходе автокорреляционного приемника, τз - время задержки принятого ЛЧМ сигнала, τu - длительность ЛЧМ сигнала, VrИ(nTu) - радиальная скорость движения носителя источника радиоизлучения, VrП(nTu) - радиальная скорость движения носителя приемника, Tu - период следования ЛЧМ сигналов, λ - средняя длина волны ЛЧМ сигналов, 
Способ определения параметров ЛЧМ сигналов, заключающийся в приеме ЛЧМ сигналов автокорреляционным приемником, измерении разностной частоты и определении длительности импульса и ширины спектра сигнала, отличающийся тем, что дополнительно определяют радиальные скорости движения носителей источника радиоизлучения и приемника, среднюю длину волны ЛЧМ сигналов, измеряют период следования ЛЧМ сигналов и определяют ширину спектра ЛЧМ сигналов по формуле:
где fp(n) - разностная частота сигнала на выходе автокорреляционного приемника, τз - время задержки принятого ЛЧМ сигнала, τи - длительность ЛЧМ сигнала, VrИ (nТи) - радиальная скорость движения носителя источника радиоизлучения, VrП(nТи) - радиальная скорость движения носителя приемника, Ти - период следования ЛЧМ сигналов, λ - средняя длина волны ЛЧМ сигналов,  N - количество ЛЧМ сигналов.
N - количество ЛЧМ сигналов.
| СМИРНОВ Ю.А | |||
| Радиотехническая разведка | |||
| Москва, Воениздат, 2001, с.125-128 | |||
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2013 |
|
RU2531387C2 |
| МНОГОЧАСТОТНЫЙ СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОГО ВРЕМЕНИ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2012 |
|
RU2499275C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ЗОНДИРОВАНИЕМ ПРОСТРАНСТВА ФАЗОМАНИПУЛИРОВАННЫМИ СИГНАЛАМИ С ПЕРЕСТРОЙКОЙ ДЛИТЕЛЬНОСТИ ПАРЦИАЛЬНЫХ РАДИОИМПУЛЬСОВ ПО ЛИНЕЙНОМУ ЗАКОНУ | 2009 |
|
RU2405169C2 |
| RU 147908 U1, 20.11.2014 | |||
| СПОСОБ ПРОВЕРКИ ЭЛЕКТРОННЫХ БИЛЕТОВ, ХРАНЯЩИХСЯ В ПОЛЬЗОВАТЕЛЬСКИХ ТЕРМИНАЛАХ | 2005 |
|
RU2382414C2 |
| US 5257284 A, 26.10.1993 | |||
| JP 20001147267 A, 29.05.2001. | |||

