Изобретение относится к области фотограмметрии и может быть использовано при обработке материалов дистанционного зондирования Земли, получаемых при съемке местности, для определения угловых элементов внешнего ориентирования.
Известен способ [1] определения углов наклона съемочной камеры, установленной на аэрокосмическом аппарате, реализованный с использованием инерциальных датчиков, принцип которых основан на применении гироскопических систем. Он включает в себя: раскрутку гироскопов таким образом, чтобы их главная ось была ориентирована в заданном направлении, например в надир по отношению к Земле, периодический опрос угловых датчиков, показывающих текущее отклонение осей гироскопа, запоминание полученных при этом углов. Угловые данные записывают в паспорт съемки.
Недостаток этого способа заключается в том, что он со временем накапливает ошибку в определении углов наклона съемочной камеры.
Для реализации данного способа требуется сложный агрегат в виде совокупности гироскопов, датчиков, измерительных блоков, запоминающих и передающих устройств и т.п.
Известен способ [2] определения углов наклона космического аппарата, при реализации которого диаметрально противоположно со съемочной камерой устанавливают и жестко связывают с ней несколько (до 4) блоков определения координат звезд (БОКЗ), которые в момент съемки земной поверхности съемочной камерой фотографируют звездное небо. Полученное цифровое изображение звездного неба сравнивают с имеющейся картой звездного неба для данного момента времени и по результатам этих измерений определяют величины разворота всех БОКЗов, а следовательно, и съемочной камеры относительно надирного направления на Землю. Угловые данные записывают в паспорт съемки.
Однако данный способ весьма сложен и дорогостоящ, так как требует наличия карты всего звездного неба, выборки текущего участка звездного неба, соответствующего снимаемой местности, и БОКЗов, установку и закрепление последних на космическом аппарате. Кроме того, данный способ определяет углы наклона не самой плоскости изображения местности, а всего космического аппарата. Это приводит к появлению угловой ошибки в определении наклона плоскости получаемого изображения.
Известен способ определения углов наклона плоскости снимка, который принят за прототип, включающий выбор на местности опорных точек в виде твердых контуров, измерение их геодезических координат, например, с помощью спутникового навигационного приемника, создание на эти точки абрисов, получение съемочной камерой в фокальной плоскости объектива цифрового растрового аэрокосмического изображения земной поверхности, визуализацию его с помощью программно-технических средств на экране монитора, увеличение изображения на экране монитора, наведение измерительного курсора на точки изображения, ввод паспорта съемки на данное изображение, нахождение по абрисам на изображении опорных точек объектов местности и измерение их пиксельных координат, фототриангуляцию, в результате которой и определяют углы наклона данного снимка [3].
Недостатком прототипа является необходимость выбора на местности опорных точек и измерения их геодезических координат с высокой точностью, создания на эти точки абрисов, нахождения по ним на изображении опорных точек, измерения на изображении пиксельных координат опорных точек, выполнения фототриангуляции. Таким образом, данный способ требует наличия координат опорных точек, что не всегда выполнимо, особенно на недоступной территории.
Задачей изобретения является определение угловых элементов внешнего ориентирования изображения местности, получаемого при съемке, в том числе, недоступных территорий.
Техническим результатом предлагаемого способа является сокращение числа выполняемых операций при определении углов наклона снимков местности за счет использования других (по сравнению с прототипом) исходных данных.
Сущность изобретения заключается в том, что в известный способ, включающий получение съемочной камерой в фокальной плоскости объектива цифрового растрового аэрокосмического изображения земной поверхности, ввод паспорта съемки для данного изображения, визуализацию и увеличение его размеров на экране монитора с помощью программно-технических средств, расчет угла наклона плоскости аэрокосмического изображения местности, после увеличения размеров полученного изображения на экране монитора с помощью программно-технических средств определяют теоретический размер (Lтеор) проекции стороны пикселя изображения на местности при съемке в надир с использованием паспорта съемки путем умножения текущего значения высоты съемки на физический размер стороны пикселя и деления на величину фокусного расстояния объектива съемочной камеры. Затем находят на изображении объект, расположенный на горизонтальной поверхности местности и размер которого в направлении изменения угла наклона плоскости изображения известен, увеличивают изображение этого объекта до получения на экране монитора читаемых границ пикселей, подсчитывают количество пикселей, укладывающихся в размер объекта в направлении изменения угла наклона плоскости изображения и определяют фактический размер (Lфакт) проекции стороны пикселя на местности путем деления известного размера объекта на количество пикселей, а угол наклона плоскости изображения (α) рассчитывают по формуле: 
Предлагаемый способ поясняется фигурами 1, 2, 3.
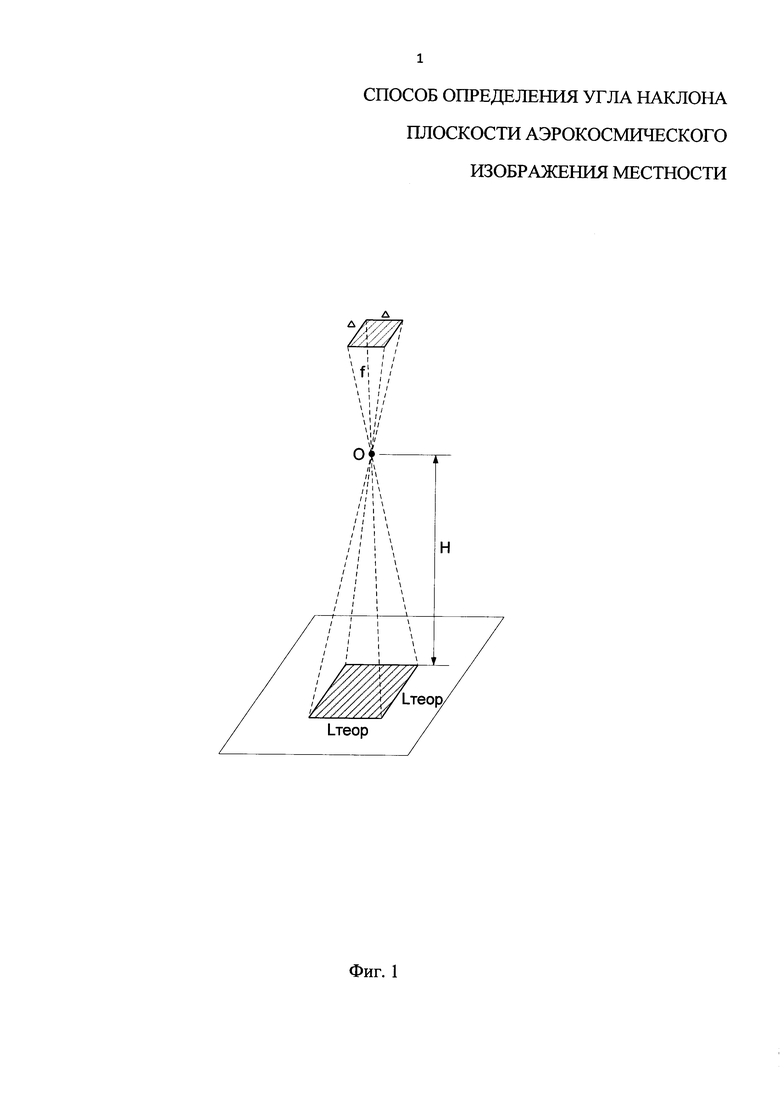
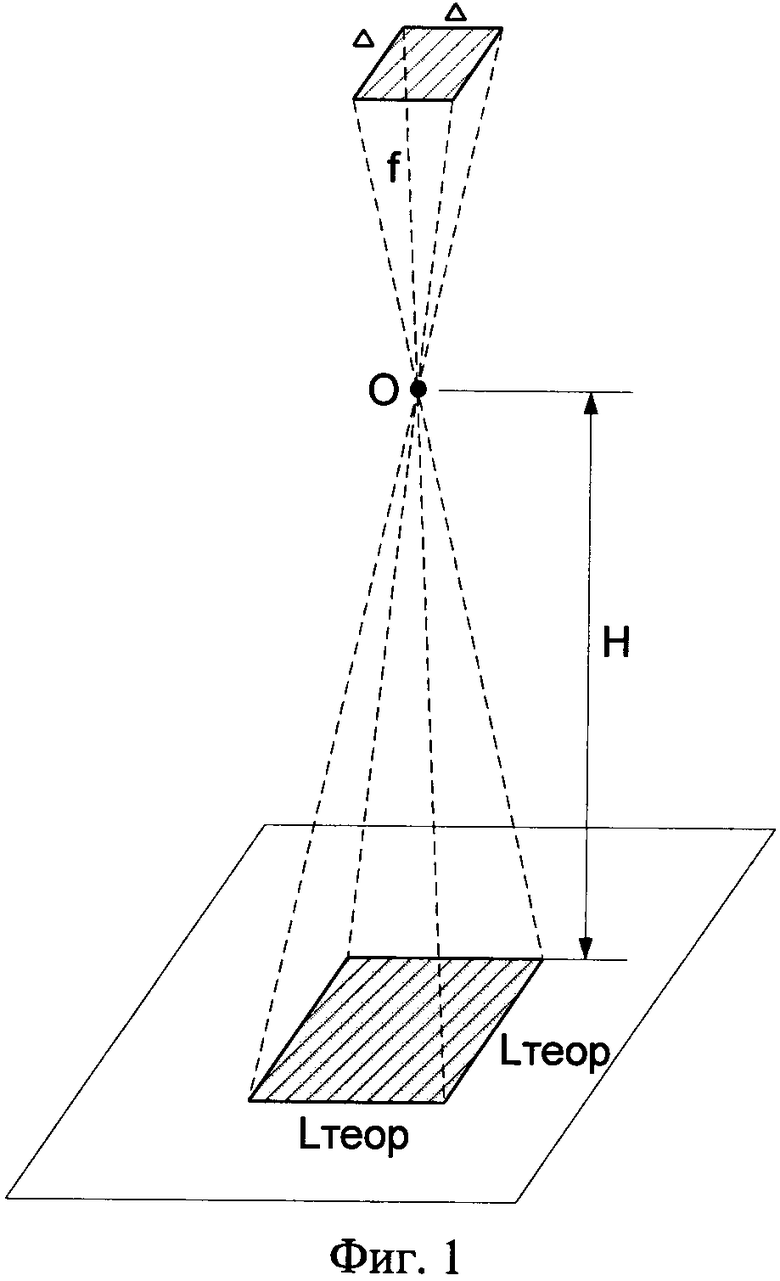
На фиг. 1 показана геометрия получения проекции пикселя на местности при съемке в надир.
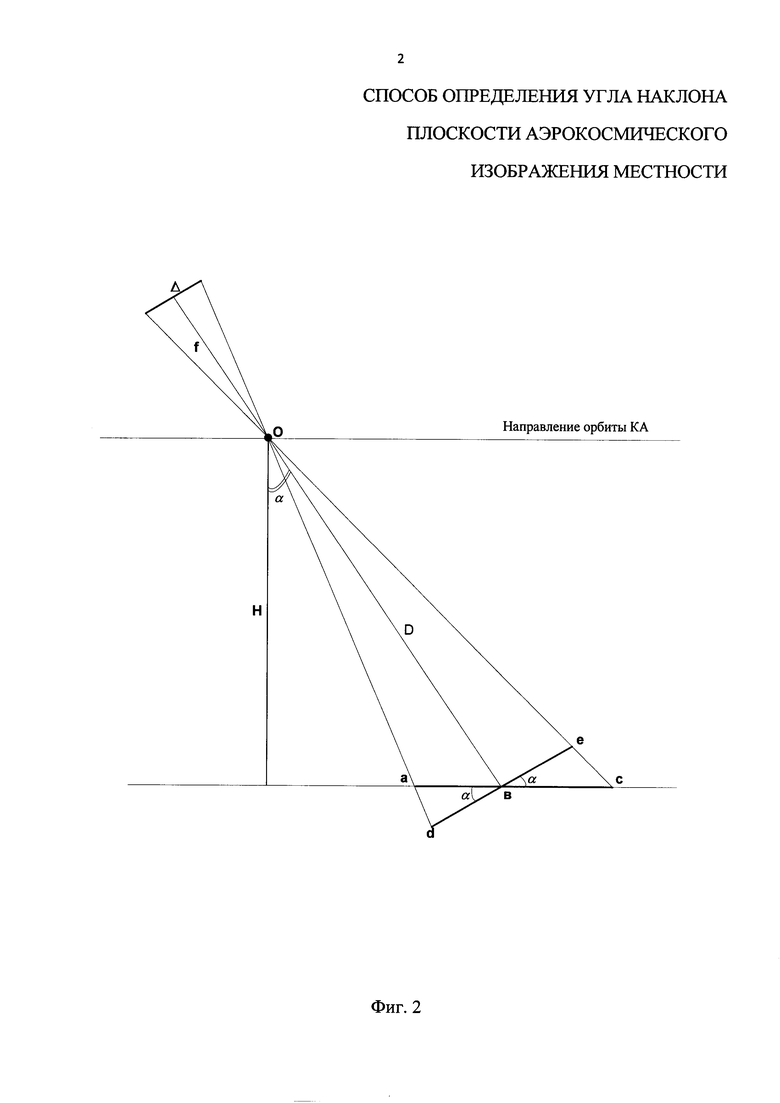
На фиг. 2 изображена геометрия получения проекции пикселя на местности при съемке под углом.
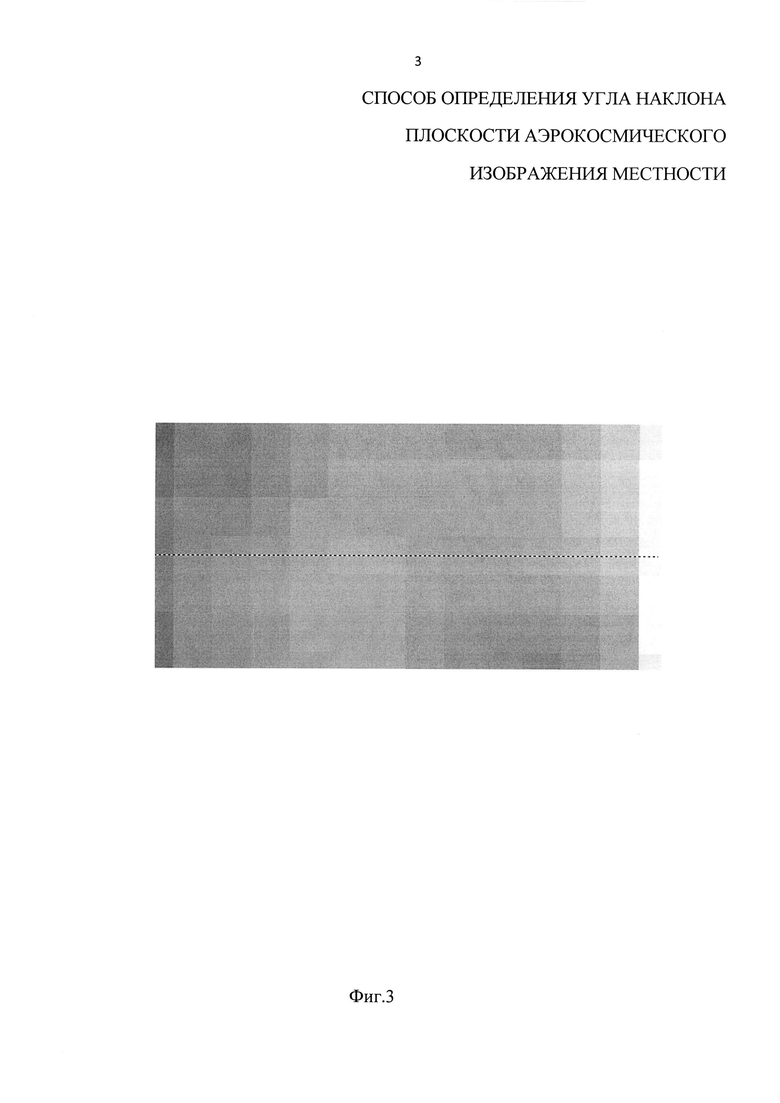
На фиг. 3 представлено увеличенное (до получения четких границ пикселей) изображение объекта местности.
Принцип реализации предложенного способа заключается в следующем.
По значениям высоты съемки, физического размера пикселя ПЗС-сенсора и фокусного расстояния объектива, взятым из паспорта съемки, определяют теоретический (надирный) размер (Lтеор) пикселя на местности, который соответствует съемке в надир (фиг. 1). Он равен:

где Δ - физический размер пикселя ПЗС-сенсора,
Н - высота съемки для данной строки изображения;
f - фокусное расстояние объектива съемочной камеры.
На экране монитора визуализируют изображение местности и увеличивают его фрагмент таким образом, чтобы четко были видны пиксели. С помощью управляющего органа, например «мышки», трекбола и т.п., перемещают фрагмент изображения таким образом, чтобы совместить пиксель (- и) с некоторым объектом, который расположен на горизонтальной поверхности местности и размер которого известен. Если объект с известными размерами больше одного пикселя, то определяют количество пикселей, соответствующих этому объекту, а затем находят частное от деления известного размера на количество пикселей, которое и будет равно фактическому размеру проекции пикселя на местности Lфакт в направлении искомого угла. Измерение размера пикселя можно осуществлять также автоматически с использованием специальных программных средств.
Объектами с известными размерами могут быть: река (пруд, озеро), взлетно-посадочная полоса, стадион, ширина дороги, крыша строения, либо расстояние между двумя опорными точками, зафиксированными и измеренными на местности с высокой точностью, либо расстояние, измеренное на крупномасштабном ортофотоплане и т.п. Главное, чтобы был известен размер этого объекта на местности с высокой точностью.
На фиг. 2 показан принцип сканерной съемки, который позволяет обосновать вывод формулы для определения одного из углов наклона плоскости снимка.
Так, размер проекции пикселя на местности, ориентированной под углом α к ней, равен:
Откуда: 
Зная теоретический и фактический размеры пикселя, по формуле (2) определяют искомый угол наклона плоскости снимка. Применительно к сканерному космическому снимку каждая его строка характеризуется своим углом наклона α. В частном случае это значение угла наклона могут иметь все строки изображения (снимка).
Для проверки работоспособности предложенного способа на снимке было выбрано изображение крыши стандартного дома, ширина которого в направлении изменения угла наклона равна примерно 12 м.
При большом увеличении видны границы самой крыши и пиксели (фиг. 3) в направлении изменения угла наклона снимка. В данном случае по ширине крыши уместилось 12 пикселей. Разделив ширину крыши, равную 12 м, на количество пикселей, равное 12, получим, что размер стороны пикселя в направлении изменения угла наклона равен 1,0 м.
По формуле (1) вычисляют теоретический размер пикселя. Так при Н=475 км, f=4 м и Δ=6 мкм он оказался равным 0,712 м. Зная его, а также фактический размер пикселя, по формуле (2) была вычислена величина угла наклона снимка относительно плоскости крыши. В данном случае он оказался равным 32°,454 (32° 27′ 14″,4). Фактически в паспорте съемки дан угол, равный 32° 21′ 34″,7. Разность между паспортными и экспериментальными данными незначительна. Она обусловлена: ошибкой в задании ширины крыши, точностью измерения крыши в пикселях, точностью паспортных данных, а также строгостью определения теоретического размера пикселя.
Для обеспечения объективной точности определения угла наклона сканерного снимка представляется целесообразным определять фактический размер не одного пикселя в пределах строки, а нескольких ее пикселей (чем больше, тем лучше), а затем усреднить их. Применительно к сканерному изображению, состоящему из многих строк, где каждая строка теоретически имеет свой угол наклона, определять угол наклона можно не для всех строк, а только для нескольких строк изображения, например, первой, средней и последней. А далее методом интерполяции определять угол наклона любой строки сканерного изображения.
Реализация предложенного способа позволит не только существенно упростить и удешевить процесс определения угла наклона космических снимков за счет использования на космическом аппарате более простых и менее точных, поэтому и более дешевых устройств для определения угла наклона съемочной камеры, но и определить углы наклона снимков без использования опорных точек местности.
Литература
1. Ишлинский А.Ю. Механика гироскопических систем, М., 1963.
2. БОКЗ-60/1000. Эскизный проект, т. 1, 2, 2009. Институт космических исследований РАН.
3. Лобанов А.Н. Фотограмметрия. М., "Недра", 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СКАНЕРНЫХ СНИМКОВ | 2023 |
|
RU2798768C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЕМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2709978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА С АППАРАТУРОЙ ДЛЯ СЪЁМКИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711834C1 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ КОСМИЧЕСКОГО СКАНЕРНОГО СНИМКА | 2015 |
|
RU2597024C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2019 |
|
RU2712781C1 |
| СПОСОБ ОПТИЧЕСКОГО КОНТРОЛЯ ИЗНОСА КОНТАКТНЫХ ПРОВОДОВ | 2005 |
|
RU2291066C2 |
| СПОСОБ ПРИВЯЗКИ ВЫПОЛНЕННЫХ С КОСМИЧЕСКОГО АППАРАТА СНИМКОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2711775C1 |
| Способ получения непрерывного стереоизображения земной поверхности с движущегося носителя | 2018 |
|
RU2686513C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ С ДВИЖУЩЕГОСЯ НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2498378C1 |
Изобретение относится к области фотограмметрии, аэрокосмической съемке и может быть использовано для определения угловых элементов внешнего ориентирования получаемого при съемке изображения местности. Согласно способу на снимке, представленном на экране монитора, находят объект с известными размерами, увеличивают его изображение до получения читаемых границ пикселей, подсчитывают количество пикселей, укладывающихся в размер объекта в направлении изменения угла наклона плоскости изображения. С помощью математических формул рассчитывают теоретический (Lтеор) и фактический (Lфакт) размеры проекции стороны пикселя изображения, а угол наклона плоскости изображения (α) рассчитывают по формуле 
Способ определения угла наклона плоскости аэрокосмического изображения местности, включающий получение съемочной камерой в фокальной плоскости объектива цифрового растрового аэрокосмического изображения земной поверхности, ввод паспорта съемки для данного изображения, визуализацию и увеличение его размеров на экране монитора с помощью программно-технических средств, расчет угла наклона плоскости аэрокосмического изображения местности, отличающийся тем, что после увеличения размеров полученного изображения на экране монитора с помощью программно-технических средств определяют теоретический размер (Lтеор) проекции стороны пикселя изображения на местности при съемке в надир с использованием паспорта съемки путем умножения текущего значения высоты съемки на физический размер стороны пикселя и деления на величину фокусного расстояния объектива съемочной камеры, находят на изображении объект, расположенный на горизонтальной поверхности местности и размер которого в направлении изменения угла наклона плоскости изображения известен, увеличивают изображение этого объекта до получения на экране монитора читаемых границ пикселей, подсчитывают количество пикселей, укладывающихся в размер объекта в направлении изменения угла наклона плоскости изображения, определяют фактический размер (Lфакт) проекции стороны пикселя на местности путем деления известного размера объекта на количество пикселей, а угол наклона плоскости изображения (α) рассчитывают по формуле:  .
.
| Мышляев В | |||
| А., Влияние измерительных и изобразительных свойств космических снимков на масштаб создаваемых по ним ортофотопланов, Геодезия и картография N6, июнь 2014г | |||
| Гомозов О.А., Еремеев В.В., Кузнецов А.Е., и др | |||
| Алгоритмы и технологии обработки информации от КА "Ресурс-ДК" // Современные проблемы дистанционного зондирования Земли из космоса | |||
| - |

